IO fence详解
总io点数

总IO点数
Contents
目录
01. 总IO点数概念
04. 总IO点数管理
02. 总IO点数计算
03. 总IO点数规划
05.
总IO点数技术发展与 趋势
06.
总IO点数的应用场景 与案例分析
Part 点数:输入输出点数的简称,指 一个设备或系统能够处理的输入输 出信号的数量。
01
工业自动化:用于控制和监测生产设备,提高 生产效率和质量
02
智能家居:用于控制家电、照明、安防等设备, 实现家居智能化
03
智能交通:用于监控和管理交通信号、车辆、 行人等,提高交通效率和安全性
04
医疗设备:用于监测和记录患者生理数据,辅 助医生诊断和治疗
05
环境监测:用于监测和记录环境数据,如温度、 湿度、空气质量等,为环保部门提供决策依据
规模和设备数量,计算所 2
需的IO点数
分配IO点数:根据设备
类型和功能,将IO点数
3
分配给各个设备
设计IO点数表:根据分
配结果,设计IO点数表, 4
明确每个IO点的功能和 连接方式
验证IO点数规划:根据
系统需求,验证IO点数
5
规划是否满足系统要求
优化IO点数规划:根据
系统优化需求,对IO点
6
数规划进行优化和调整
02
确定IO点数:根据系统需求,确定所需的 总IO点数
04
验证IO分配方案:通过仿真或实际测试, 验证IO分配方案的可行性和有效性
06
实施IO分配方案:按照优化后的IO分配方 案,实施IO分配,完成系统集成和调试
IO点数规划实例
io点分配方法
io点分配方法【最新版4篇】目录(篇1)1.I/O点的概念与分类2.I/O点分配方法的必要性3.I/O点的分配策略4.I/O点分配方法的实际应用5.结论正文(篇1)1.I/O点的概念与分类I/O点,即输入/输出点,是指计算机系统中用于与外部设备进行数据交互的接口。
根据功能不同,I/O点可分为输入点、输出点和双向点。
输入点用于接收外部设备的数据输入,如键盘、鼠标等;输出点用于将计算机系统的数据输出到外部设备,如显示器、打印机等;双向点则可以同时进行数据输入和输出,如触摸屏。
2.I/O点分配方法的必要性随着计算机技术的发展,外部设备日益增多,对 I/O 点的需求也在不断增长。
如何合理地分配 I/O 点,提高计算机系统的运行效率,成为亟待解决的问题。
因此,研究 I/O 点分配方法具有重要的实际意义。
3.I/O点的分配策略I/O点的分配策略主要分为静态分配和动态分配两类。
(1)静态分配:静态分配是指在系统启动时,一次性地将 I/O 点分配给各个外部设备,并在整个运行过程中保持不变。
静态分配的优点是分配过程简单,易于实现;缺点是分配不够灵活,无法根据系统运行状态进行调整。
(2)动态分配:动态分配是指根据系统运行的需要,实时地分配和回收 I/O 点。
动态分配的优点是充分利用 I/O 资源,提高系统运行效率;缺点是分配过程较为复杂,需要考虑多种因素。
4.I/O点分配方法的实际应用在实际应用中,可根据不同场景选择合适的 I/O 点分配方法。
例如,对于不需要频繁插拔的外部设备,可采用静态分配方法;对于需要频繁插拔的外部设备,可采用动态分配方法。
此外,还可将两种方法结合使用,充分发挥各自的优点。
5.结论I/O点分配方法对于提高计算机系统运行效率具有重要作用。
目录(篇2)1.IO 点的概念和重要性2.IO 点的分配方法3.IO 点的分配策略4.IO 点的应用实例正文(篇2)IO 点,即输入输出点,是指在计算机系统中,用于实现数据输入和输出的接口。
io知识点总结
io知识点总结什么是IO?IO(Input/Output)是指计算机与外部设备(如磁盘、网络等)之间的数据传输。
在计算机科学中,IO是指任何将数据从一个地方移动到另一个地方的过程。
输入是指从外部设备到计算机,输出是指从计算机到外部设备。
IO是处理器与外部世界交互的方式。
输入可以是用户输入、文件、网络数据等,输出可以是显示到屏幕上、保存到文件中、发送到网络等。
常见的IO设备有磁盘、键盘、鼠标、打印机、显示器、网络接口等。
在计算机编程中,IO是一个重要的概念。
程序需要从外部设备读取数据,处理数据,然后将结果输出到外部设备。
因此,理解IO的原理和使用方法对编程非常重要。
IO的分类IO可分为同步IO和异步IO两种模式。
同步IO是指程序在进行IO操作时会阻塞,直到操作完成才会继续进行下一步操作,而异步IO是指程序进行IO操作时不会阻塞,可以继续进行其他操作。
同步IO的优点是简单易用,适合于简单的IO操作,但缺点是效率不高。
异步IO的优点是效率高,适合于大量的IO操作,但缺点是复杂度高,使用起来较为困难。
IO通常又可以分为文件IO和网络IO两种类型。
文件IO是指程序与文件进行数据交换,包括读取文件、写入文件、修改文件等操作。
网络IO是指程序与网络进行数据交换,包括发送数据、接收数据、建立连接、断开连接等操作。
文件IO和网络IO在使用上有一些不同,但原理都是类似的。
在进行IO操作时,程序需要打开文件或建立网络连接,然后读取或写入数据,最后关闭文件或断开连接。
IO的基本操作在进行IO操作时,通常需要进行如下几个基本步骤:1. 打开文件或建立连接:首先需要使用适当的函数或方法打开文件或建立连接。
在文件IO 中,通常使用open()函数,而在网络IO中,通常使用socket库来创建套接字并连接到网络。
2. 读取数据或写入数据:一旦打开文件或建立连接,就可以进行数据的读取或写入操作。
在文件IO中,可以使用read()函数读取数据,write()函数写入数据;而在网络IO中,可以使用recv()函数接收数据,send()函数发送数据。
发那科机器人焊接应用的IO配置(总线型)
发那科机器人焊接应用的I/O配置(总线型)<H2><A NAME="1">Version Information</A></H2> <PRE><A HREF="#TOP">【TOP】</A><br>F Number: YH14979VERSION : SpotTool+$VERSION: V7.5093 06/14/2010DATE: 14-AUG-11 18:21VERSION INFORMATION::SOFTWARE: ID:SpotTool+ 7DA5/12S/W Serial No. : 88150Controller ID : YH14979Default Personality (from FD)R-2000iB/210F V7.50P/12Servo Code : V15.01Cart. Mot. Parameter: V3.00JNT. Mot. Parameter : V3.00DCS : NoneSoftware Edition No.: V7.50P/12Update Version : NoneCustomization Ver. : NoneRoot Version : V7.5093 Boot MONITOR : V7.70P/06 Teach Pendant : 7D0F/01M Browser Plugins : V7.7004 TP Core Firmware : V7.7004 Media from FRL 06/24/2010CONFIG::FEATURE: ORD NO: SpotTool+ H590 English Dictionary H521Multi Language (CHIN) H539AA Vision Mastering AAVM Analog I/O H550Auto Software Update ATUP Automatic Backup J545 Background Editing J616 Camera I/F VCAMCell I/O CLIOCommon shell R645 Common shell core CMSC Common softpanel CMSPCommon style select STYL Condition Monitor J628 Constant Path R663 Control Reliable CNRE Corner Region R654 Diagnostic log RSCH Disable Faults CDSB Dispense Plug-in SPLG Dual Check Safety UIF DCSU Enhanced Mirror Image R698 Enhanced Rob Serv Req ORSR Enhanced T1 Mode R680 Enhanced User Frame J604 Ext. DIO Config EIOC Extended Error Log R542 External DI BWD ESET FCTN Menu Save J516 FTP Interface J716 Group Mask Exchange MASK High-Speed Skip J627 Host Communications HOCO Hour Meter J513I/O Interconnect 2 J542Incr Instruction J510 KAREL Cmd. Language J650 KAREL Run-Time Env J539 Kernel + Basic S/W H510 License Checker LCHK LogBook(System) OPLG MACROs, Skip/Offset J503 MH gripper common MHGC Mat.Handling Option MPLG MechStop Protection MCSP Mirror Shift J506Mixed logic J554Mode Switch MDSW Motion logger R637Multi Appl Enabler MAEN Multi Equipment J617 Multi-Tasking J600 Position Registers J514 Print Function J507Prog Num Selection J515 Program Adjust J517Program Shift J505 Program Status PRST Program ToolBox R598 RDM Robot Discovery FRDM Robot Service Request SRSR Robot Servo Code H930 SNPX basic SNBA Seal Common SLCM Shift Library SHLBShift and Mirror Lib SMLB Soft Parts in VCCM SPVC Spot Plug-in SPPGTCP Auto Set J520TCP Speed Prediction J524 TCP/IP Interface HTCP TMILIB Interface TMILTP Menu Accounting TPAC TPTX TPTXTelnet Interface TELNTool Offset J509 Unexcepted motn Check UECK User Frame UFRMVision Core VCOR Vision Library VIPLVision SP CSXC CSXC Vision Shift Tool CVVFWeb Server HTTPWeb Svr Enhancements R626 iPendant CGTP iPendant Grid Display IGUI iPendant Setup IPGSR-2000iB/210F H601 Servo Gun Axes H869 Auto Tuning CS J952 Collision Guard R534 Collision Guard Pack J684 Cycle Time Priority J523 DeviceNet Interface J753 DeviceNet(Slave) J754Disp 2nd analog port R528 Extended Axis Control J518 Extended User Frames R696 FANUC ServoGun Change J665 FRL Params R651HMI Device (SNPX) R553 Multi-Group Motion J601PC Interface R641PMC(FAPT Ladder) J760 Password Protection J541 ROS Ethernet Packets R603 Servo Gun Option J643 Servo Gun WT Compens J933 Space Check J609USB port on iPendant J957 YELLOW BOX J775 iRCalibration VShift J994Arc Advisor R666Aux Servo Code SVMO Common calib UIF CUIF Cycle time Opt. CTOP Extended Axis Speed EXTS Func stup FCSPHTTP Proxy Svr PRXY High Speed ServoGun J886 IntelligentTP PC I/F J770JPN ARCPSU PRM J885Motherboard driver MOBOPC Send Macros SEND Pressure Control PCTL Requires CP CPRQ Robot Library Setup RLCM SSPC error text ETSS Servo Gun Core J670 Servo Hand Change SVHC Sgdiag core SGDG Socket Messaging R636Soft Limit SLMTTCPP Extention TCPE VCalibration Common VCCM VisShift I/F Common CVVC Vision Shift Common CVVS istdpnl IPNLiPendant HMI Setup U001RM HELP INCL VIS PKGS U004 SMB TP Backup U006 RIPE GET_VAR FIX U007 FLEXTOOL: ADD R729.FD U008 CVIS ADD EP ADV PKG U009CVIS NO WTWTEST LOAD U010 LOAD HELP FOR SELECT U011 FALSE ALARM CPMO-130 U012 MD: HANG FROM INTP U013R709 DRAM AVAILCHECKS U014 CVIS VPCS SUPP LIMCHK U015 CVIS VPFF POS DIF FIX U0168-12 CHARACTER PROGRA U017 SAVE FRAMEVAR.SV U018TP Enable NOAM U026 STRCTURE SHADOW UPDAT U027 RIPE STATICS TOO MUCH U028 TIMQ MOTN-003 U030 ROBOGUIDE DAUGHTER U032 Disable touch in Edit U033PATH NODE MOVETO U035 RIPEREMOVE TIME RETRY U038 VMXPACK MAY ASSERT U039 CYCLE DATA MAY BE COR U040 TOO MANY ARC OPTIONS U043 PMC Display wait fix U044APSH-171 fix U045SLOW T1 MOTN U046GET_POS_TPE fix U047jog disable by app wa U048CVIS VPEP HIST RT FIX U049 MXSPD TB CPMO003 U050 CVIS BARCODE ENHANCE U051 prv save may not work U052High RIPE traffic fix U053print from sysvar scr U054 PROGRAM ADJUST FOR SH U058 RIPE/GETSET ERROR HAN U060 IPENDANT SCREEN UNREA U061 HANDLE PART CORRECTIO U064 NO FILE BACKGROUND ED U066 CVIS EP PKG INCL SVIP U067 SIX DIGIT VERSIONS U068 CVIS NEW VERSION P06 U069 IMAGE SAVE LOAD U070 DISP PROC ISSUE U071 REPLAN JOINT DELTA U078TP EDIT CALLFROM FIX U079 CVIS FIX IPNDT RT IMG U080$coord_mask default U084R719 ENHANCEMNT/FIXES U085 Local Hold TIMQ Adjus U097PG: CHDELMON can caus U100 CVIS: 3D multi-view d U101 Increase Number of FD U103 KAREL CANNOT ACCESS M U104 Robot Settings are lo U108PAINT - Wait/Release U109 FlexTool: Backward mo U114 PAINT - PaintPRO Repa U117 EDIT SCREEN IS CLOSED U500 ANTIDEFECT UIF FIX U507 PNIO V750 FIX1 U509FIX LOADING DB SYSVAR U510 FIX EDGE DETECTION U511 ONLINE HELP BUGFIX U512 CVIS: CAM CALIB FIX U514 DISP CUSTOM FOR SSGUN U515 FIX ABC JARKY MOTION U517 MILLIMETER CONVERSION U518 GARBLED STR REG U519ALARM TEXT BUG FIX U520 DISP CUST DRY FOR SSG U521 IMPROVE LWR DETECTION U523 CVIS FREEZE VLOG TASK U525 VP2S MM CONVERSION U526 FIX TP FREEZE IBPX U527FX DB/TB BUSY RUNNING U528 RECORD CALIBRATION LO U529 DIV CALCULATION FIX U530FIX FOR BWD RETURN U531 CONDITION MONITOR FIX U532 VOFS: UNEXP ALARM FIX U533 FIX SERVO GUN TEXT U534 FIX FENCE SVEMG ABNML U535 DCS CC_SAFEIO ALARM U537 IMPROVED GUN TOUCHUP U540 FIX GUN CHG WITH DNET U541 UPDATE GUNTCH PAEAMS U542 DOT PETTERN BUG U543 CVIS: IRVISION BUG FI U544 UPDATE SVGN ERROR TXT U545 FIX TOOLCHG WITH DNET U546MLOCK CHK WITH GUNCHG U547MECH COMP FOR GUNTCH U549 IMPROVE GUNTCH PARAMS U550 VISION MEMORY LEAK U551FIX UNWANTED MESSAGE U552 SUPPORT DET SOFT WORK U553CVIS:SPEC CHANGE OF V U554GRID DETECT BUG FIX U559MOTOR::GR: AX: MOTOR ID AND INFO:1 1 ACaiSR30/3000 80A H1 DSP1-L1 2 ACaiSR30/3000 80A H2 DSP1-M1 3 ACaiSR30/3000 80A H3 DSP1-J1 4 ACa12/4000iS 40A H4 DSP1-K1 5 ACa12/4000iS 40A H5 DSP2-L1 6 ACa12/4000iS 40A H6 DSP2-M1 7 aiF22/3000 80A H DSP -2 1 aiS8/4000 80A H DSP -SERVO::GROUP: AXIS: SERVO PARAM ID:1 1 P02.061 2 P02.061 3 P02.061 4 P02.061 5 P02.061 6 P02.061 7 P00.392 1 P00.39</PRE><H2><A NAME="2">Memory Detail</A></H2> <PRE><A HREF="#TOP">【TOP】</A><P>MEMORY USAGE::MEMORY DETAIL (MAIN):Pools TOTAL AVAILABLE LARGEST TPP 800.0KB 577.8KB 555.0KBPERM 1978.0KB 371.6KB 366.5KB SYSTEM 7182.0KB 2.5KB 2.5KB SHADOW 5894.5KB 5556.5KB 32.0KB TEMP 21052.5KB 1422.8KB 714.2KBFROM 31857.0KB 9258.0KB .0KBHARDWAREFROM 32MBDRAM 32MBSRAM 2MBMEMORY DETAIL (COMM):Pools TOTAL AVAILABLE LARGESTTPP 0.0KB 0.0KB 0.0KBPERM 48.0KB 47.8KB 47.8KBSYSTEM 6144.0KB 5553.0KB 5553.0KBSHADOW 5894.5KB 5556.5KB 32.0KBTEMP 9844.5KB 8201.3KB 7949.9KB</PRE><H2><A NAME="3">Program Status Information</A></H2> <PRE><A HREF="#TOP">【TOP】</A><P>TASK STATES:1 RESET status = ABORTED****** History Data ******Routine depth: 0 Routine: RESETLine: 1 Program: RESET Type: TP2 STHICHNG status = ABORTED****** History Data ******Routine depth: 0 Routine: STHICHNGLine: 128 Program: STHICHNG Type: PC 3 PNLINST status = ABORTED****** History Data ******Routine depth: 0 Routine: PNLINSTLine: 223 Program: PNLINST Type: PC 4 PSCOLD status = ABORTED****** History Data ******Routine depth: 0 Routine: PSCOLDLine: 93 Program: PSCOLD Type: PC 5 SYRSRUTL status = ABORTED****** History Data ******Routine depth: 0 Routine: SYRSRUTLLine: 63 Program: SYRSRUTL Type: PC 6 SVGNCH status = ABORTED****** History Data ******Routine depth: 0 Routine: SVGNCHLine: 287 Program: SVGNCH Type: PC 7 SGDIAINI status = ABORTED****** History Data ******Routine depth: 0 Routine: SGDIAINILine: 204 Program: SGDIAINI Type: PC 8 ATSHELL RUNNING @ 1055 in ATSHELL of ATSHELL****** History Data ******Routine depth: 0 Routine: ATSHELLLine: 1055 Program: ATSHELL Type: PC9 LOADCELL status = ABORTED****** History Data ******Routine depth: 0 Routine: PBCORELine: 0 Program: PBCORE Type: 010 MHGRSHLL RUNNING @ 1213 in MHGRSHLL of MHGRSHLL****** History Data ******Routine depth: 0 Routine: MHGRSHLLLine: 1213 Program: MHGRSHLL Type: PC 11 SWAXTSK1 RUNNING @ 758 in PROCESSAMR of SWAXTCMN****** History Data ******Routine depth: 1 Routine: PROCESSAMRLine: 758 Program: SWAXTCMN Type: PCRoutine depth: 0 Routine: SWAXTSK1Line: 172 Program: SWAXTSK1 Type: PC12 SWAXTSK2 RUNNING @ 758 in PROCESSAMR of SWAXTCMN****** History Data ******Routine depth: 1 Routine: PROCESSAMRLine: 758 Program: SWAXTCMN Type: PCRoutine depth: 0 Routine: SWAXTSK2Line: 120 Program: SWAXTSK2 Type: PC13 SLCUSTOM RUNNING @ 1647 in SLCUSTOM of SLCUSTOM****** History Data ******Routine depth: 0 Routine: SLCUSTOMLine: 1647 Program: SLCUSTOM Type: PC 14 SWIMSET status = ABORTED****** History Data ******Routine depth: 0 Routine: SWIMSETLine: 348 Program: SWIMSET Type: PC</PRE><H2><A NAME="4">I/O status information</A></H2> <PRE><A HREF="#TOP"></A><P>IO STATUS::DIN【1】OFFDIN【2】OFFDIN【3】OFFDIN【4】OFFDIN【5】OFF UPPER TIP RESETDIN【6】OFF LOWER TIP RESETDIN【7】OFF TEST RUNDIN【8】OFF TIP CHANGE COMPLETEDIN【9】OFFDIN【10】OFFDIN【11】OFF DRESS_1 COMPLETEDIN【12】OFF DRESS_2 COMPLETEDIN【13】OFF DRESS_1 ADV.LSDIN【14】OFF DRESS_2 ADV.LSDIN【15】OFF DRESS_1 RET.LSDIN【16】OFF DRESS_2 RET.LSDIN【17】OFFDIN【18】OFFDIN【19】OFF TC1 5STEP 1DIN【20】OFF TC1 5STEP 2DIN【21】OFF TC1 5STEP 3DIN【22】OFF TC1 5STEP 4DIN【23】OFF TC2 5STEP 1DIN【24】OFF TC2 5STEP 2DIN【25】OFF TC2 5STEP 3DIN【26】OFF TC2 5STEP 4DIN【27】OFF POP WELD COMPLETE DIN【28】OFFDIN【29】OFFDIN【30】OFFDIN【31】OFF GUN COVER OPENDIN【32】ON GUN COVER CLOSE LS DIN【33】OFF HAND COVER OPENDIN【34】ON HAND COVER CLOSE DIN【35】OFF AHC COVER-3 OPEN LS DIN【36】OFF AHC COVER-3 CLOSE LS DIN【37】OFF AHC COVER-4 OPEN LS DIN【38】OFF AHC COVER-4 CLOSE LS DIN【39】OFF GUN1 2ND ST OPEN LSDIN【40】OFF GUN2 2ND ST OPEN LS DIN【41】OFF CHUCK OPEN CONFIRM DIN【42】ON CHUCK CLOSE CONFIRM DIN【43】ON AHC FACEDIN【44】OFFDIN【45】OFFDIN【46】OFFDIN【47】OFF ROBOT 2ND STARTDIN【48】OFFDIN【49】OFF WELD COMPLETEDIN【50】OFFDIN【51】OFFDIN【52】OFFDIN【53】OFFDIN【54】OFFDIN【55】ON STYLE1DIN【56】OFF STYLE2DIN【57】OFF STYLE4DIN【58】OFF STYLE8DIN【59】OFF STYLE16DIN【60】OFF STYLE32DIN【61】OFF STYLE64DIN【62】OFF STYLE128DIN【63】OFF GUN1 STEADDIN【64】OFF HAND STEADDIN【65】OFF TOOL STEAD 3DIN【66】OFF TOOL STEAD 4DIN【67】OFFDIN【68】OFFDIN【69】OFFDIN【70】OFFDIN【71】OFF Jig Non-int.DIN【72】OFF Shuttle Nnn-int.DIN【73】OFFDIN【74】OFF Weld Enable 1DIN【75】OFF Weld Enable 2DIN【76】ON Robot_G Weld Comp.1 DIN【77】OFFDIN【78】OFFDIN【79】ON Pick Up Ok Feeder DIN【80】OFFDIN【81】OFF Hand Jig Conf.DIN【82】OFF Hand Rock Adv Comp DIN【83】OFF Jig Cover Close Comp.DIN【84】OFF Hand Rock Ret Comp. DIN【85】OFF Jig Cover Open Comp. DIN【86】ON Robct_G I/L1DIN【87】ON Robot_G I/L2DIN【88】OFFDIN【89】OFFDIN【90】OFFDIN【91】OFFDIN【92】OFFDIN【93】OFFDIN【94】OFF Sealer HoldDIN【95】OFFDIN【96】OFFDIN【97】OFFDIN【98】OFFDIN【99】OFFDIN【100】OFFDIN【101】OFFDIN【102】OFFDIN【103】OFFDIN【104】OFFDIN【105】OFFDIN【106】OFF PART IN STATION CONFIRM DIN【107】ON ROBOT AWAY FROM STATION DIN【108】OFFDIN【109】ON GUN IN STATIONDIN【110】OFF HANDKING IN STATIONDIN【113】ON SEALING MATERIAL OKDIN【114】OFF SEALING MATERIAL LACKING DIN【115】OFFDIN【116】OFF HEATING NOT OKDIN【117】OFFDIN【118】OFFDIN【119】OFFDIN【120】OFFDIN【121】OFFDIN【122】OFFDIN【123】OFFDIN【124】OFFDIN【125】OFFDIN【126】OFFDIN【127】OFFDIN【128】OFFDIN【129】OFF Clamp 1 openDIN【130】ON Clamp 1 closed DIN【131】OFF Clamp 2 open DIN【132】ON Clamp 2 closed DIN【133】OFF Clamp 3 open DIN【134】ON Clamp 3 closed DIN【135】OFF Clamp 4 open DIN【136】ON Clamp 4 closed DIN【137】OFF Clamp 5 open DIN【138】ON Clamp 5 closed DIN【139】OFF Clamp 6 open DIN【140】ON Clamp 6 closed DIN【141】OFF _DIN【142】OFF _DIN【143】OFF _DIN【144】OFF _DIN【145】OFF Part present 1 DIN【146】OFF Part present 2 DIN【147】OFFDIN【148】OFFDIN【149】OFF 2-1-ONDIN【150】ON 2-1-OFFDIN【151】OFF 2-2-ONDIN【152】ON 2-2-OFFDIN【153】ON 2-3-OFFDIN【154】ON 2-4-OFFDIN【155】OFFDIN【156】OFFDIN【157】ON 3-1-OFFDIN【158】OFF 3-1-ONDIN【159】ON 3-2-OFFDIN【160】OFF 3-2-ONDOUT【1】OFF ROBOT USER ALARM DOUT【2】OFF STYLE VAERITY FAULT DOUT【3】OFFDOUT【4】OFFDOUT【5】OFF GUN COVER OPEN DOUT【6】OFF GUN COVER CLOSE DOUT【7】OFF HAND COVER OPEN DOUT【8】OFF HAND COVER CLOSE DOUT【9】OFF AHC COVER-3 OPEN DOUT【10】OFF AHC COVER-3 CLOSE DOUT【11】OFF AHC COVER-4 OPEN DOUT【12】OFF AHC COVER-4 CLOSE DOUT【13】OFFDOUT【14】OFF TIP WEAR OVER MOVEDOUT【15】OFF TIP WEAR OVER FIXDOUT【16】OFF TIP CHANGE POSITIONDOUT【17】OFF TC1 GUN FAULT CHECK DOUT【18】OFF TC1 OFF_SET MEASURING DOUT【19】OFFDOUT【20】OFFDOUT【21】OFFDOUT【22】OFFDOUT【23】OFFDOUT【24】OFFDOUT【25】OFFDOUT【26】OFFDOUT【27】OFFDOUT【28】OFFDOUT【29】OFF DRESSOR-1 STARTDOUT【30】OFF DRESSOR-2 STARTDOUT【31】OFF DRESSOR SHIFT1 ADV.SERVO DOUT【32】OFF DRESSOR SHIFT2 ADV.SERVO DOUT【33】OFF POP START1DOUT【34】OFF POP START2DOUT【35】OFF POP START3DOUT【36】OFF POP START4DOUT【37】OFF POP WELD CONDITION 1 DOUT【38】OFF POP WELD CONDITION 2 DOUT【39】OFF POP WELD CONDITION 4 DOUT【40】OFF POP WELD CONDITION 8 DOUT【41】OFF POP WELD CONDITION 16 DOUT【42】OFF POP WELD CONDITION 32 DOUT【43】OFF POP SWING ADV.DOUT【44】OFFDOUT【45】OFF WORK COMPLETEDOUT【46】ON Shuttle Run EnableDOUT【47】OFF 2nd Work Comp.DOUT【48】OFF GUN1 PRESSDOUT【49】OFFDOUT【50】OFFDOUT【51】OFF UNCHUCK POSITION DOUT【52】OFF AHC FaceDOUT【53】OFF CHUCK OPENDOUT【54】ON CHUCK CLOSEDOUT【55】OFF Sealer FaultDOUT【56】OFF Sealer EM.StopDOUT【57】OFF Sealer LowDOUT【58】OFF SEAL AIR PRESS DOUT【59】OFFDOUT【60】OFFDOUT【61】OFF WELD CONDITION 1 DOUT【62】OFF WELD CONDITION 2 DOUT【63】OFF WELD CONDITION 4 DOUT【64】OFF WELD CONDITION 8 DOUT【65】OFF WELD CONDITION16 DOUT【66】OFF WELD CONDITION32 DOUT【67】OFF WELD CONDITION64 DOUT【68】OFF WELD CONDITION128 DOUT【69】ON Jig Non-int.DOUT【70】ON Shuttle Non-int.DOUT【71】OFF Tip Change Run. DOUT【72】OFF Tip Dress Run.DOUT【73】OFFDOUT【74】OFFDOUT【75】OFFDOUT【76】OFFDOUT【77】ON Fdr. Non-int.DOUT【78】OFF Fdr. unload comp. DOUT【79】OFFDOUT【80】OFF Jig Hand ClampDOUT【81】OFF Jig Cover CloseDOUT【82】OFF Jig Hand UnclampDOUT【83】OFF Jig Cover OpenDOUT【84】ON Robot_G I/L1DOUT【85】ON Robot_G I/L2DOUT【86】OFFDOUT【87】OFFDOUT【88】OFFDOUT【89】OFFDOUT【90】OFF SEALING MATERIAL LACKING DOUT【91】OFF SEALING HEATING NOT OK DOUT【92】OFF SEALING GUN OPENDOUT【93】OFFDOUT【94】OFF CC-LINK STATUSDOUT【95】OFF CC-LINK STATUSDOUT【96】OFF CC-LINK STATUSDOUT【97】OFF CC-LINK STATUSDOUT【98】OFF CC-LINK STATUSDOUT【99】OFF CC-LINK STATUSDOUT【100】OFF CC-LINK STATUSDOUT【101】OFF CC-LINK STATUSDOUT【103】OFFDOUT【104】OFF JIG CLAMP OPEN REQUEST DOUT【105】OFFDOUT【106】OFF PART IN STATIONDOUT【107】OFFDOUT【108】OFFDOUT【113】OFF SEALING STARTDOUT【114】ON SEALING STOPDOUT【115】OFFDOUT【116】OFFDOUT【117】OFFDOUT【118】OFFDOUT【119】OFFDOUT【120】OFFDOUT【121】OFFDOUT【122】OFFDOUT【123】OFFDOUT【124】OFFDOUT【125】OFFDOUT【126】OFFDOUT【127】OFFDOUT【129】OFF SPARE DOUT【130】OFF SPARE DOUT【131】OFF CLAMP_3_ON DOUT【132】ON CLAMP_3_OFF DOUT【133】OFF CLAMP_2_ON DOUT【134】ON CLAMP_2_OFF DOUT【135】OFF CLAMP_1_ON DOUT【136】ON CLAMP_1_OFF DOUT【137】OFF SPARE DOUT【138】OFF SPARE DOUT【139】OFF _DOUT【140】OFF _DOUT【141】OFF _DOUT【142】OFF _DOUT【143】OFF _DOUT【144】OFF _GIN【1】 1 Style No.GOUT【1】0UI【1】ON *IMSTPUI【2】ON *HoldUI【3】ON *SFSPDUI【5】OFF Fault resetUI【6】OFF StartUI【7】OFF HomeUI【8】ON EnableUI【9】OFF RSR1/PNS1 UI【10】OFF RSR2/PNS2 UI【11】OFF RSR3/PNS3 UI【12】OFF RSR4/PNS4 UI【13】OFF RSR5/PNS5 UI【14】OFF RSR6/PNS6 UI【15】OFF RSR7/PNS7 UI【16】OFF RSR8/PNS8 UI【17】OFF PNS strobe UI【18】OFF Prod start UO【1】ON Cmd enabled UO【2】ON System ready UO【3】OFF Prg running UO【4】OFF Prg paused UO【5】OFF Motion held UO【6】OFF FaultUO【7】ON At perchUO【9】OFF Batt alarmUO【10】OFF BusyUO【11】OFF ACK1/SNO1UO【12】OFF ACK2/SNO2UO【13】OFF ACK3/SNO3UO【14】OFF ACK4/SNO4UO【15】OFF ACK5/SNO5UO【16】OFF ACK6/SNO6UO【17】OFF ACK7/SNO7UO【18】OFF ACK8/SNO8UO【19】OFF SNACKUO【20】OFF ReservedSI【1】OFF Fault resetSI【2】ON RemoteSI【3】ON HoldSI【4】OFF User PB#1SI【5】OFF User PB#2SI【6】OFF Cycle startSI【7】OFFSI【8】ON CE/CRselectb0 SI【9】ON CE/CRselectb1SI【11】OFFSI【12】OFFSI【13】OFFSI【14】OFFSI【15】OFFSI【16】ONSO【1】OFF Cycle start SO【2】OFF HoldSO【3】OFF Fault LED SO【4】OFF Batt alarm SO【5】OFF User LED#1 SO【6】ON User LED#2 SO【7】OFF TP enabled SO【8】OFFSO【9】OFFSO【10】OFFSO【11】OFFSO【12】OFFSO【13】OFFSO【14】OFFSO【15】OFFUI【1】ON *IMSTPUI【2】ON *HoldUI【3】ON *SFSPDUI【4】OFF Cycle stopUI【5】OFF Fault resetUI【6】OFF StartUI【7】OFF HomeUI【8】ON EnableUI【9】OFF RSR1/PNS1 UI【10】OFF RSR2/PNS2 UI【11】OFF RSR3/PNS3 UI【12】OFF RSR4/PNS4 UI【13】OFF RSR5/PNS5 UI【14】OFF RSR6/PNS6 UI【15】OFF RSR7/PNS7 UI【16】OFF RSR8/PNS8 UI【17】OFF PNS strobe UI【18】OFF Prod start UO【1】ON Cmd enabled UO【2】ON System ready UO【3】OFF Prg runningUO【4】OFF Prg paused UO【5】OFF Motion held UO【6】OFF FaultUO【7】ON At perchUO【8】OFF TP enabled UO【9】OFF Batt alarm UO【10】OFF BusyUO【11】OFF ACK1/SNO1 UO【12】OFF ACK2/SNO2 UO【13】OFF ACK3/SNO3 UO【14】OFF ACK4/SNO4 UO【15】OFF ACK5/SNO5 UO【16】OFF ACK6/SNO6 UO【17】OFF ACK7/SNO7 UO【18】OFF ACK8/SNO8 UO【19】OFF SNACKUO【20】OFF ReservedRI【1】OFFRI【2】OFFRI【3】OFFRI【4】OFFRI【5】OFFRI【6】OFFRI【7】OFFRI【8】OFFRO【1】OFFRO【2】OFFRO【3】OFFRO【4】OFFRO【5】OFFRO【6】OFFRO【7】OFFRO【8】OFF</PRE><H2><A NAME="5">I/O Configuration Information</A></H2> <PRE><A HREF="#TOP">【TOP】</A><P>IO CONFIGURATION::DIN【5】UPPER TIP RESETDIN【6】LOWER TIP RESETDIN【7】TEST RUNDIN【8】TIP CHANGE COMPLETEDIN 1 - 8 RACK: 81 SLOT: 15 PORT: 19DIN【11】DRESS_1 COMPLETEDIN【12】DRESS_2 COMPLETEDIN【13】DRESS_1 ADV.LSDIN【14】DRESS_2 ADV.LSDIN【15】DRESS_1 RET.LSDIN【16】DRESS_2 RET.LSDIN 9 - 16 RACK: 81 SLOT: 15 PORT: 27 DIN【19】TC1 5STEP 1DIN【20】TC1 5STEP 2DIN【21】TC1 5STEP 3DIN【22】TC1 5STEP 4DIN【23】TC2 5STEP 1DIN【24】TC2 5STEP 2DIN 17 - 24 RACK: 81 SLOT: 15 PORT: 35 DIN【25】TC2 5STEP 3DIN【26】TC2 5STEP 4DIN【27】POP WELD COMPLETEDIN【31】GUN COVER OPENDIN【32】GUN COVER CLOSE LSDIN 25 - 32 RACK: 81 SLOT: 15 PORT: 43 DIN【33】HAND COVER OPENDIN【34】HAND COVER CLOSEDIN【35】AHC COVER-3 OPEN LSDIN【36】AHC COVER-3 CLOSE LSDIN【37】AHC COVER-4 OPEN LSDIN【38】AHC COVER-4 CLOSE LSDIN【39】GUN1 2ND ST OPEN LSDIN【40】GUN2 2ND ST OPEN LSDIN 33 - 40 RACK: 81 SLOT: 15 PORT: 51 DIN【41】CHUCK OPEN CONFIRMDIN【42】CHUCK CLOSE CONFIRMDIN【43】AHC FACEDIN【47】ROBOT 2ND STARTDIN 41 - 48 RACK: 81 SLOT: 15 PORT: 59 DIN【49】WELD COMPLETEDIN【55】STYLE1DIN【56】STYLE2DIN 49 - 56 RACK: 81 SLOT: 15 PORT: 67 DIN【57】STYLE4DIN【58】STYLE8DIN【59】STYLE16DIN【60】STYLE32DIN【61】STYLE64DIN【62】STYLE128DIN【63】GUN1 STEADDIN【64】HAND STEADDIN 57 - 64 RACK: 81 SLOT: 15 PORT: 75 DIN【65】TOOL STEAD 3DIN【66】TOOL STEAD 4DIN【71】Jig Non-int.DIN【72】Shuttle Nnn-int.DIN 65 - 72 RACK: 81 SLOT: 15 PORT: 83 DIN【74】Weld Enable 1DIN【75】Weld Enable 2DIN【76】Robot_G Weld Comp.1DIN【79】Pick Up Ok FeederDIN 73 - 80 RACK: 81 SLOT: 15 PORT: 91 DIN【81】Hand Jig Conf.DIN【82】Hand Rock Adv CompDIN【83】Jig Cover Close Comp.DIN【84】Hand Rock Ret Comp.DIN【85】Jig Cover Open Comp.DIN【86】Robct_G I/L1DIN【87】Robot_G I/L2DIN 81 - 88 RACK: 81 SLOT: 15 PORT: 99 DIN【94】Sealer HoldDIN 89 - 96 RACK: 81 SLOT: 15 PORT: 107DIN【101】DIN【104】DIN 97 - 104 RACK: 81 SLOT: 15 PORT: 115 DIN【106】PART IN STATION CONFIRMDIN【107】ROBOT AWAY FROM STATIONDIN【109】GUN IN STATIONDIN【110】HANDKING IN STATIONDIN 105 - 110 RACK: 81 SLOT: 15 PORT: 123 DIN【113】SEALING MATERIAL OKDIN【114】SEALING MATERIAL LACKINGDIN【116】HEATING NOT OKDIN 113 - 120 RACK: 82 SLOT: 6 PORT: 1 DIN 121 - 128 RACK: 82 SLOT: 6 PORT: 9 DIN【129】Clamp 1 openDIN【130】Clamp 1 closedDIN【131】Clamp 2 openDIN【132】Clamp 2 closedDIN【133】Clamp 3 openDIN【134】Clamp 3 closedDIN【135】Clamp 4 openDIN【136】Clamp 4 closedDIN 129 - 136 RACK: 82 SLOT: 4 PORT: 1DIN【137】Clamp 5 openDIN【138】Clamp 5 closedDIN【139】Clamp 6 openDIN【140】Clamp 6 closedDIN【141】_DIN【142】_DIN【143】_DIN【144】_DIN 137 - 144 RACK: 82 SLOT: 4 PORT: 9 DIN【145】Part present 1DIN【146】Part present 2DIN【149】2-1-ONDIN【150】2-1-OFFDIN【151】2-2-ONDIN【152】2-2-OFFDIN 145 - 152 RACK: 82 SLOT: 5 PORT: 1 DIN【153】2-3-OFFDIN【154】2-4-OFFDIN【157】3-1-OFFDIN【158】3-1-ONDIN【159】3-2-OFFDIN【160】3-2-ONDIN 153 - 160 RACK: 82 SLOT: 5 PORT: 9 DOUT【1】ROBOT USER ALARMDOUT【2】STYLE VAERITY FAULTDOUT【5】GUN COVER OPENDOUT【6】GUN COVER CLOSEDOUT【7】HAND COVER OPENDOUT【8】HAND COVER CLOSEDOUT 1 - 8 RACK: 81 SLOT: 15 PORT: 21 DOUT【9】AHC COVER-3 OPENDOUT【10】AHC COVER-3 CLOSEDOUT【11】AHC COVER-4 OPENDOUT【12】AHC COVER-4 CLOSEDOUT【14】TIP WEAR OVER MOVEDOUT【15】TIP WEAR OVER FIXDOUT【16】TIP CHANGE POSITIONDOUT 9 - 16 RACK: 81 SLOT: 15 PORT: 29 DOUT【17】TC1 GUN FAULT CHECKDOUT【18】TC1 OFF_SET MEASURINGDOUT 17 - 24 RACK: 81 SLOT: 15 PORT: 37 DOUT【29】DRESSOR-1 STARTDOUT【30】DRESSOR-2 STARTDOUT【31】DRESSOR SHIFT1 ADV.SERVODOUT【32】DRESSOR SHIFT2 ADV.SERVODOUT 25 - 32 RACK: 81 SLOT: 15 PORT: 45 DOUT【33】POP START1DOUT【34】POP START2DOUT【35】POP START3DOUT【36】POP START4DOUT【37】POP WELD CONDITION 1DOUT【38】POP WELD CONDITION 2DOUT【39】POP WELD CONDITION 4DOUT【40】POP WELD CONDITION 8DOUT 33 - 40 RACK: 81 SLOT: 15 PORT: 53 DOUT【41】POP WELD CONDITION 16DOUT【42】POP WELD CONDITION 32DOUT【43】POP SWING ADV.DOUT【45】WORK COMPLETEDOUT【46】Shuttle Run EnableDOUT【47】2nd Work Comp.DOUT【48】GUN1 PRESSDOUT 41 - 48 RACK: 81 SLOT: 15 PORT: 61 DOUT【51】UNCHUCK POSITIONDOUT【52】AHC FaceDOUT【53】CHUCK OPENDOUT【55】Sealer FaultDOUT【56】Sealer EM.StopDOUT 49 - 56 RACK: 81 SLOT: 15 PORT: 69 DOUT【57】Sealer LowDOUT【58】SEAL AIR PRESSDOUT【61】WELD CONDITION 1DOUT【62】WELD CONDITION 2DOUT【63】WELD CONDITION 4DOUT【64】WELD CONDITION 8DOUT 57 - 64 RACK: 81 SLOT: 15 PORT: 77 DOUT【65】WELD CONDITION16DOUT【66】WELD CONDITION32DOUT【67】WELD CONDITION64DOUT【68】WELD CONDITION128DOUT【69】Jig Non-int.DOUT【70】Shuttle Non-int.DOUT【71】Tip Change Run.DOUT【72】Tip Dress Run.DOUT 65 - 72 RACK: 81 SLOT: 15 PORT: 85 DOUT【77】Fdr. Non-int.DOUT【78】Fdr. unload comp.DOUT 73 - 80 RACK: 81 SLOT: 15 PORT: 93 DOUT【81】Jig Cover CloseDOUT【82】Jig Hand UnclampDOUT【83】Jig Cover OpenDOUT【84】Robot_G I/L1DOUT【85】Robot_G I/L2DOUT 81 - 88 RACK: 81 SLOT: 15 PORT: 101 DOUT【90】SEALING MATERIAL LACKINGDOUT【91】SEALING HEATING NOT OKDOUT【92】SEALING GUN OPENDOUT【94】CC-LINK STATUSDOUT【95】CC-LINK STATUSDOUT【96】CC-LINK STATUSDOUT 89 - 96 RACK: 81 SLOT: 15 PORT: 109 DOUT【97】CC-LINK STATUSDOUT【98】CC-LINK STATUSDOUT【99】CC-LINK STATUSDOUT【100】CC-LINK STATUSDOUT【101】CC-LINK STATUSDOUT【103】DOUT【104】JIG CLAMP OPEN REQUESTDOUT 97 - 104 RACK: 81 SLOT: 15 PORT: 117 DOUT【106】PART IN STATIONDOUT 105 - 108 RACK: 81 SLOT: 15 PORT: 125 DOUT【113】SEALING STARTDOUT【114】SEALING STOPDOUT 113 - 120 RACK: 82 SLOT: 6 PORT: 1 DOUT 121 - 128 RACK: 82 SLOT: 6 PORT: 9 DOUT【129】SPAREDOUT【130】SPAREDOUT【131】CLAMP_3_ONDOUT【132】CLAMP_3_OFFDOUT【133】CLAMP_2_ONDOUT【134】CLAMP_2_OFFDOUT【135】CLAMP_1_ONDOUT【136】CLAMP_1_OFFDOUT 129 - 136 RACK: 82 SLOT: 4 PORT: 1 DOUT【137】SPAREDOUT【138】SPAREDOUT【139】_DOUT【140】_DOUT【141】_DOUT【142】_DOUT【143】_DOUT【144】_DOUT 137 - 144 RACK: 82 SLOT: 4 PORT: 9GIN【1】Style No.GIN 1 RACK: 81 SLOT: 15 PORT: 73 #NUM: 8 GOUT 1 RACK: 81 SLOT: 15 PORT: 81 #NUM: 6 UI【1】*IMSTPUI【2】*HoldUI【3】*SFSPDUI【4】Cycle stopUI【5】Fault resetUI【6】StartUI【7】HomeUI【8】EnableUI 1 - 8 RACK: 81 SLOT: 15 PORT: 1UI【9】RSR1/PNS1UI【10】RSR2/PNS2UI【11】RSR3/PNS3UI【12】RSR4/PNS4UI【13】RSR5/PNS5UI【14】RSR6/PNS6UI【15】RSR7/PNS7。
iosurface ios用法

一、介绍iosurfaceiosurface 是苹果公司推出的一个图像处理框架,主要用于在 iOS 和macOS 系统上进行图像和视瓶处理。
它提供了一种跨进程共享图像数据的方式,可以在 GPU 和 CPU 之间快速传递图像数据,还可以在不同的进程之间共享图像数据,非常适合于需要高性能图像处理和多进程协作的应用场景。
二、iosurface 的主要用法1. 创建和管理 iosurface 对象:iosurface 对象的创建和管理是 iosurface 框架的核心功能之一。
可以使用 iosurface_create 函数创建一个新的 iosurface 对象,并用iosurface_ret本人n 和 iosurface_release 函数对 iosurface 对象进行引用计数的管理。
另外,还可以使用 iosurface_lookup 和iosurface_lookup_name 函数来查找指定 ID 或名称的 iosurface 对象。
这些函数提供了 iosurface 对象的基本创建和管理功能,为其他功能的实现提供了基础。
2. 使用 iosurface 进行图像和视瓶处理:iosurface 在图像和视瓶处理方面有着丰富的功能和应用。
可以使用iosurface 对象作为 CoreGraphics、CoreImage 和 CoreVideo 等图像处理框架的输入和输出对象,实现图像和视瓶数据的处理和传输。
通过 iosurface 对象,可以实现图像的采集、处理、合成和显示等功能,为应用程序提供了强大的图像和视瓶处理能力。
3. 跨进程共享图像数据:iosurface 还可以实现跨进程共享图像数据的功能,这对于需要多进程协作的应用程序非常有用。
通过 iosurface 对象,不同进程之间可以共享图像数据,实现图像的快速传递和共享,提高了多进程协作的效率和性能。
这为应用程序的开发和优化提供了更大的灵活性和可能性。
IO测试工具之fio详解
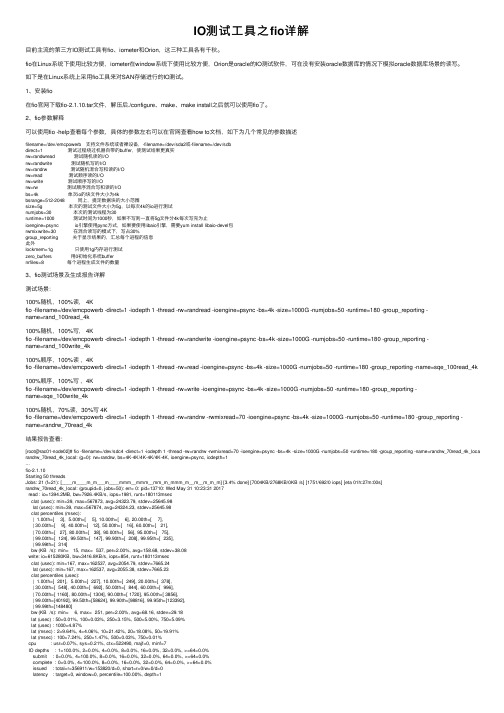
IO测试⼯具之fio详解⽬前主流的第三⽅IO测试⼯具有fio、iometer和Orion,这三种⼯具各有千秋。
fio在Linux系统下使⽤⽐较⽅便,iometer在window系统下使⽤⽐较⽅便,Orion是oracle的IO测试软件,可在没有安装oracle数据库的情况下模拟oracle数据库场景的读写。
如下是在Linux系统上采⽤fio⼯具来对SAN存储进⾏的IO测试。
1、安装fio在fio官⽹下载fio-2.1.10.tar⽂件,解压后./configure、make、make install之后就可以使⽤fio了。
2、fio参数解释可以使⽤fio -help查看每个参数,具体的参数左右可以在官⽹查看how to⽂档,如下为⼏个常见的参数描述filename=/dev/emcpowerb ⽀持⽂件系统或者裸设备,-filename=/dev/sda2或-filename=/dev/sdbdirect=1 测试过程绕过机器⾃带的buffer,使测试结果更真实rw=randwread 测试随机读的I/Orw=randwrite 测试随机写的I/Orw=randrw 测试随机混合写和读的I/Orw=read 测试顺序读的I/Orw=write 测试顺序写的I/Orw=rw 测试顺序混合写和读的I/Obs=4k 单次io的块⽂件⼤⼩为4kbsrange=512-2048 同上,提定数据块的⼤⼩范围size=5g 本次的测试⽂件⼤⼩为5g,以每次4k的io进⾏测试numjobs=30 本次的测试线程为30runtime=1000 测试时间为1000秒,如果不写则⼀直将5g⽂件分4k每次写完为⽌ioengine=psync io引擎使⽤pync⽅式,如果要使⽤libaio引擎,需要yum install libaio-devel包rwmixwrite=30 在混合读写的模式下,写占30%group_reporting 关于显⽰结果的,汇总每个进程的信息此外lockmem=1g 只使⽤1g内存进⾏测试zero_buffers ⽤0初始化系统buffernrfiles=8 每个进程⽣成⽂件的数量3、fio测试场景及⽣成报告详解测试场景:100%随机,100%读, 4Kfio -filename=/dev/emcpowerb -direct=1 -iodepth 1 -thread -rw=randread -ioengine=psync -bs=4k -size=1000G -numjobs=50 -runtime=180 -group_reporting -name=rand_100read_4k100%随机,100%写, 4Kfio -filename=/dev/emcpowerb -direct=1 -iodepth 1 -thread -rw=randwrite -ioengine=psync -bs=4k -size=1000G -numjobs=50 -runtime=180 -group_reporting -name=rand_100write_4k100%顺序,100%读,4Kfio -filename=/dev/emcpowerb -direct=1 -iodepth 1 -thread -rw=read -ioengine=psync -bs=4k -size=1000G -numjobs=50 -runtime=180 -group_reporting -name=sqe_100read_4k 100%顺序,100%写,4Kfio -filename=/dev/emcpowerb -direct=1 -iodepth 1 -thread -rw=write -ioengine=psync -bs=4k -size=1000G -numjobs=50 -runtime=180 -group_reporting -name=sqe_100write_4k100%随机,70%读,30%写 4Kfio -filename=/dev/emcpowerb -direct=1 -iodepth 1 -thread -rw=randrw -rwmixread=70 -ioengine=psync -bs=4k -size=1000G -numjobs=50 -runtime=180 -group_reporting -name=randrw_70read_4k结果报告查看:[root@rac01-node02]# fio -filename=/dev/sdc4 -direct=1 -iodepth 1 -thread -rw=randrw -rwmixread=70 -ioengine=psync -bs=4k -size=1000G -numjobs=50 -runtime=180 -group_reporting -name=randrw_70read_4k_local randrw_70read_4k_local: (g=0): rw=randrw, bs=4K-4K/4K-4K/4K-4K, ioengine=psync, iodepth=1...fio-2.1.10Starting 50 threadsJobs: 21 (f=21): [____m____m_m___m____mmm__mmm__mm_m_mmm_m__m__m_m_m] [3.4% done] [7004KB/2768KB/0KB /s] [1751/692/0 iops] [eta 01h:27m:00s]randrw_70read_4k_local: (groupid=0, jobs=50): err= 0: pid=13710: Wed May 31 10:23:31 2017read : io=1394.2MB, bw=7926.4KB/s, iops=1981, runt=180113msecclat (usec): min=39, max=567873, avg=24323.79, stdev=25645.98lat (usec): min=39, max=567874, avg=24324.23, stdev=25645.98clat percentiles (msec):| 1.00th=[ 3], 5.00th=[ 5], 10.00th=[ 6], 20.00th=[ 7],| 30.00th=[ 9], 40.00th=[ 12], 50.00th=[ 16], 60.00th=[ 21],| 70.00th=[ 27], 80.00th=[ 38], 90.00th=[ 56], 95.00th=[ 75],| 99.00th=[ 124], 99.50th=[ 147], 99.90th=[ 208], 99.95th=[ 235],| 99.99th=[ 314]bw (KB /s): min= 15, max= 537, per=2.00%, avg=158.68, stdev=38.08write: io=615280KB, bw=3416.8KB/s, iops=854, runt=180113msecclat (usec): min=167, max=162537, avg=2054.79, stdev=7665.24lat (usec): min=167, max=162537, avg=2055.38, stdev=7665.23clat percentiles (usec):| 1.00th=[ 201], 5.00th=[ 227], 10.00th=[ 249], 20.00th=[ 378],| 30.00th=[ 548], 40.00th=[ 692], 50.00th=[ 844], 60.00th=[ 996],| 70.00th=[ 1160], 80.00th=[ 1304], 90.00th=[ 1720], 95.00th=[ 3856],| 99.00th=[40192], 99.50th=[58624], 99.90th=[98816], 99.95th=[123392],| 99.99th=[148480]bw (KB /s): min= 6, max= 251, per=2.00%, avg=68.16, stdev=29.18lat (usec) : 50=0.01%, 100=0.03%, 250=3.15%, 500=5.00%, 750=5.09%lat (usec) : 1000=4.87%lat (msec) : 2=9.64%, 4=4.06%, 10=21.42%, 20=18.08%, 50=19.91%lat (msec) : 100=7.24%, 250=1.47%, 500=0.03%, 750=0.01%cpu : usr=0.07%, sys=0.21%, ctx=522490, majf=0, minf=7IO depths : 1=100.0%, 2=0.0%, 4=0.0%, 8=0.0%, 16=0.0%, 32=0.0%, >=64=0.0%submit : 0=0.0%, 4=100.0%, 8=0.0%, 16=0.0%, 32=0.0%, 64=0.0%, >=64=0.0%complete : 0=0.0%, 4=100.0%, 8=0.0%, 16=0.0%, 32=0.0%, 64=0.0%, >=64=0.0%issued : total=r=356911/w=153820/d=0, short=r=0/w=0/d=0latency : target=0, window=0, percentile=100.00%, depth=1Run status group 0 (all jobs):READ: io=1394.2MB, aggrb=7926KB/s, minb=7926KB/s, maxb=7926KB/s, mint=180113msec, maxt=180113msecWRITE: io=615280KB, aggrb=3416KB/s, minb=3416KB/s, maxb=3416KB/s, mint=180113msec, maxt=180113msecDisk stats (read/write):sdc: ios=356874/153927, merge=0/10, ticks=8668598/310288, in_queue=8978582, util=99.99%io=执⾏了多少M的IObw=平均IO带宽iops=IOPSrunt=线程运⾏时间slat=提交延迟clat=完成延迟lat=响应时间bw=带宽cpu=利⽤率IO depths=io队列IO submit=单个IO提交要提交的IO数IO complete=Like the above submit number, but for completions instead.IO issued=The number of read/write requests issued, and how many of them were short.IO latencies=IO完延迟的分布io=总共执⾏了多少size的IOaggrb=group总带宽minb=最⼩.平均带宽.maxb=最⼤平均带宽.mint=group中线程的最短运⾏时间.maxt=group中线程的最长运⾏时间.ios=所有group总共执⾏的IO数.merge=总共发⽣的IO合并数.ticks=Number of ticks we kept the disk busy.io_queue=花费在队列上的总共时间.util=磁盘利⽤率4、扩展之IO队列深度在某个时刻,有N个inflight的IO请求,包括在队列中的IO请求、磁盘正在处理的IO请求。
Veritas_Cluster用户使用手册
VCS用户使用手册日常管理 (4)命令列表 (4)命令一览 (8)VCS缺省值 (10)GABCONFIG设置选项 (11)VCS 安装包 SOLARIS (11)VCS 安装 (12)VCS系统上的进程 (12)VCS启动配置文件 (13)VCS操作命令 (13)LLT GAB命令操作 (13)离线维护过程 (25)LOGS 日志信息 (25)手工升级维护过程 (26)WEB 界面地址 (29)VCS QUICKSTART 命令 (29)GAB LLT 端口 (29)VERITAS TCP端口 (30)图形界面使用指南 (31)在使用图形管理界面之前 (31)设置图形显示界面 (31)关于集群管理器用户 (31)通过命令行添加一个用户 (31)启动集群管理器 (32)添加和设置一个集群面板 (32)集群管理器窗口 (33)集群监视器 (33)集群浏览器 (34)命令中心 (40)集群窗口框 (42)模板浏览窗口 (42)管理集群 (43)启动/关闭一个集群 (43)从集群管理器中管理用户。
(44)设置用户 (45)获取集群极其对象的状态信息 (46)打开、保存、关闭集群设置 (47)管理集群对象 (47)添加和删除服务组 (48)添加/删除资源 (49)添加/删除系统 (50)管理资源和服务组关系 (50)为一个服务组管理系统 (52)将服务组启动 (52)将服务组解除在线使用 (53)将资源启动在线 (54)使资源组脱机 (54)使用向导创建一个新的服务组 (55)浏览日志信息 (56)进口额外资源类型信息 (57)设置编辑者 (57)日常管理命令列表命令一览启动 VCS 启动图形界面hastart (-force) (-stale) hagui停止 VCS# hastop -local [-force | -evacuate]-local 在你运行命令的系统上停止had# hastop -sys system_name[-force | -evacuate]-sys在你定义的系统上停止had# hastop -all [-force] -all停止cluster中所有系统的had在线更改VCS配置信息haconf –makerw …make changes…haconf –dump –makrero 得到当前的Cluster状态# hastatus -summary代理的操作手工启动和停止代理. # haagent -start agent_name -sys system_name# haagent -stop agent_name -sys system_name 添加和删除用户服务组操作VCS缺省值私网中的心跳频率 = 0.5 sec可以在 /etc/llttab 修改 1/100th secs.Low-Pri 网络心跳频率 = 1.0 sec可以在 /etc/llttab 修改 1/100th secs.重起后切换的间隔 = 60 sec可以在案hasys's ShutdownTimeout属性中修改资源监控间隔 (资源类型) = 60 sec监控离线的资源 (资源类型) = 300 secLLT宣告系统死亡时间 = 21 sec(16 sec peer inactive + 5 sec GAB stable timeout value)Peer inactive可以用"set-timer" 在 /etc/llttab中修改草案1/100th secs. Stable timeout value可以用"gabconfig -t"修改.GAB-Had心跳 = 15 sec (通过VCS_GAB_TIMEOUT环境变量设置,单位milliseconds, 需要重起had)GAB允许HAD在panic前被杀掉的时间 (IOFENCE) = 15 sec (通过gabconfig –f设置)最多网络心跳 = 8最多磁盘心跳 = 4VCS had engine端口 14141VCS Web Server端口 = 8181LLT SAP 值 = 0xcafeGABCONFIG设置选项在系统上运行 "gabconfig -l" 会显示当前的GAB设置.可以通过gabconfig修改.例子:draconis # gabconfig -lGAB Driver ConfigurationDriver state : ConfiguredPartition arbitration: Disabled Control port seed : EnabledHalt on process death: DisabledMissed heartbeat halt: DisabledHalt on rejoin : DisabledKeep on killing : DisabledRestart : EnabledNode count : 2Disk HB interval (ms): 1000Disk HB miss count : 4IOFENCE timeout (ms) : 15000Stable timeout (ms) : 5000gabconfig的选项如何对应修改的值:Driver state -cPartition arbitration -sControl port seed -n2 or -xHalt on process death -pMissed heartbeat halt -bHalt on rejoin -jKeep on killing -kIOFENCE timeout (ms) -fStable timeout (ms) -tVCS 安装包 SOLARISVRTScsc m, VCS Cluster Manager (Java Console)♉ VRTSga b, Group Membership and Atomic Broadcast♉ VRTSll t, Low Latency Transport♉ VRTSper l, Perl for VRTSvcs♉ VRTSvc s, VERITAS Cluster Server♉ VRTSvcsa g, VCS Bundled Agents♉ VRTSvcsm g, VCS Message Catalogs♉ VRTSvcsm n, VCS Manual Pages♉ VRTSvcso r, VCS Oracle Enterprise Extension♉ VRTSvcs w, Cluster Manager (Web Console)♉ VRTSvli c, VERITAS License Utilities♉ VRTSwe b, VERITAS Web GUI Engine♉ VRTSvcsd c, VCS Documentation.VCS 安装安装必须按照如下顺序:VRTSlltVRTSgabVRTSvcsVRTSperlVRTScscmVRTSvcsorVCS系统上的进程在VCS系统上可以发现一些如下的进程:root 577 1 0 Sep 14 ? 16:53 /opt/VRTSvcs/bin/hadroot 582 1 0 Sep 14 ? 0:00/opt/VRTSvcs/bin/hashadowroot 601 1 0 Sep 14 ? 2:33/opt/VRTSvcs/bin/DiskGroup/DiskGroupAgent -type DiskGrouproot 603 1 0 Sep 14 ? 0:56/opt/VRTSvcs/bin/IP/IPAgent -type IProot 605 1 0 Sep 14 ? 10:17/opt/VRTSvcs/bin/Mount/MountAgent -type Mountroot 607 1 0 Sep 14 ? 11:23/opt/VRTSvcs/bin/NIC/NICAgent -type NICroot 609 1 0 Sep 14 ? 31:14/opt/VRTSvcs/bin/Oracle/OracleAgent -type Oracleroot 611 1 0 Sep 14 ? 3:34/opt/VRTSvcs/bin/SPlex/SPlexAgent -type SPlexroot 613 1 0 Sep 14 ? 8:06/opt/VRTSvcs/bin/Sqlnet/SqlnetAgent -type Sqlnetroot 20608 20580 0 12:04:03 pts/1 0:20/opt/VRTSvcs/bin/../gui/jre1.1.6/bin/../bin/sparc/green_threads/jre -mx128m VCSVCS启动配置文件VCS启动和停止脚本包括:/etc/rc2.d/S70llt/etc/rc2.d/S92gab/etc/rc3.d/S99vcs/etc/rc0.d/K10vcs核心VCS配置文件包括:/etc/VRTSvcs/conf/config/main.cf/etc/VRTSvcs/conf/config/types.cf/etc/llttab/etc/gabtab/etc/llthostsVCS操作命令停止VCS HASTOP在所有系统上停止VCS,同时不停止所有的服务组:/opt/VRTSvcs/bin/hastop -all -force注: 如果cluster是置于可读写模式,这是唯一的停止cluster的方法. 如果Cluster是可读写的, 你会得到一个.stale .再执行hastart不会启动已经离线的服务组.在本地停止VCS和服务组:/opt/VRTSvcs/bin/hastop -local在本地停止VCS, 并且不停止本地的服务组:/opt/VRTSvcs/bin/hastop -local -force在本地停止VCS并将服务组切换到另一台系统上:/opt/VRTSvcs/bin/hastop -local -evacuateLLT GAB命令操作/sbin/gabconfig -a 校验LLT和GAB在运行./sbin/lltstat -n 显示心跳状态/sbin/lltstat -nvv 显示最多32个节电的心跳和MAC地址./sbin/lltstat -p 显示端口状态/sbin/lltconfig -a list 显示LLT连接的MAC地址./sbin/lltconfig -T query 显示心跳的频率.在两个系统间测试LLT通信:/opt/VRTSllt/llttest -p 1>transmit -n <name of other node> -c 5000/opt/VRTSllt/llttest -p 1 (on other node)>receive -c 5000/opt/VRTSllt/lltdump -f <network link device>显示LLT通信./opt/VRTSllt/lltshow -n <node name> 显示LLT内核结构./opt/VRTSllt/dlpiping -vs <network link device>打开dlpiping服务器 server./opt/VRTSllt/dlpiping -c <network link device> <MAC address of other node>发送LLT包给另一节点并看反应.GABCONFIG LLTCONFIG 广播机制GAB和LLT在TCP/IP OSI栈的第二层工作. LLT是Data Link Provider Interface (DLPI)协议.GAB 处理: (1) Cluster成员管理(2) 管理心跳(3) 在Cluster广播信息LLT 处理: (1) Cluster的系统ID(2) 为多个cluster设置cluster ID.(3) 调试网络心跳频率.心跳频率在私有网是0.5秒, 在low-pri的网络上是1秒.用 "/sbin/lltconfig -T query"发现当前的频率.用gabconfig控制广播和启动.例子:如果Cluster有四个系统,/etc/gabtab应包括:/sbin/gabconfig -c -n 4VCS只有在四个系统都启动后才会启动.为了在少于四个的系统启动VCS, 执行gabconfig时加少于四的数值node count.如果没有其他系统可用,手工广播Cluster:/sbin/gabconfig -c -x确认LLT和GAB是否已启动:/sbin/gabconfig -aGAB Port Memberships=============================================================== Port a gen 4b2f0011 membership 01 Port h gen a6690001 membership 01"a" 表示GAB在通信, "h" 表示VCS在通信. "01" 表示系统0和系统1.gen表示随机生成的数值.GAB Port Memberships===================================Port a gen a36e0003 membership 01Port a gen a36e0003 jeopardy 1Port h gen fd570002 membership 01Port h gen fd570002 jeopardy 1该输出表明一根心跳已断,VCS在jeopardy模式.GAB Port Memberships=============================================================== Port a gen 3a24001f membership 01 Port h gen a10b0021 membership 0 Port h gen a10b0021 visible ;1该输出表明系统1的GAB与它的VCS daemons失去联系.GAB Port Memberships=============================================================== Port a gen 3a240021 membership 01 该输出表明VCS daemons在当前系统上已停止,但GAB和LLT还在运行.设置LLT配置信息:/sbin/lltconfig -a list关闭GAB:/sbin/gabconfig -U卸载GAB (或 LLT)模块:modinfo | grep <gab | llt> (发现模块号)modunload -i <module number>关闭LLT:lltconfig -U监控LLT状态的命令:/sbin/lltstat -n 显示心跳状态/sbin/lltstat -nvv 显示心跳和MAC地址/sbin/lltstat -p 显示端口状态/etc下重要的VCS配置文件:/etc/rc2.d/S70llt/etc/rc2.d/S92gab/etc/rc3.d/S99vcs/etc/llttab/etc/gabtab/etc/llthosts例子:Low Latency Transport配置文件 /etc/llttab:set-node cp01set-cluster 3link hme1 /dev/hme:1 - ether - -link qfe0 /dev/qfe:0 - ether - -link-lowpri qfe4 /dev/qfe:4 - ether - -startGroup Membership Atomic Broadcast配置文件/etc/gabtab: /sbin/gabconfig -c -n3Low Latency Hosts 表 /etc/llthosts:1 cp012 cp023 cp03这些文件启动LLT和GAB:/etc/rc2.d/S70llt/etc/rc2.d/S92gab/dev的link必须存在:ln -s ../devices/pseudo/clone@0:llt llt在 /devices/pseudo :crw-rw-rw- 1 root sys 11,109 Sep 21 10:38 clone@0:lltcrw-rw-rw- 1 root sys 143, 0 Sep 21 10:39 gab@0:gab_0crw-rw-rw- 1 root sys 143, 1 Feb 1 16:59 gab@0:gab_1crw-rw-rw- 1 root sys 143, 2 Sep 21 10:39 gab@0:gab_2crw-rw-rw- 1 root sys 143, 3 Sep 21 10:39 gab@0:gab_3crw-rw-rw- 1 root sys 143, 4 Sep 21 10:39 gab@0:gab_4crw-rw-rw- 1 root sys 143, 5 Sep 21 10:39 gab@0:gab_5crw-rw-rw- 1 root sys 143, 6 Sep 21 10:39 gab@0:gab_6crw-rw-rw- 1 root sys 143, 7 Sep 21 10:39 gab@0:gab_7crw-rw-rw- 1 root sys 143, 8 Sep 21 10:39 gab@0:gab_8crw-rw-rw- 1 root sys 143, 9 Sep 21 10:39 gab@0:gab_9crw-rw-rw- 1 root sys 143, 10 Sep 21 10:39 gab@0:gab_acrw-rw-rw- 1 root sys 143, 11 Sep 21 10:39 gab@0:gab_bcrw-rw-rw- 1 root sys 143, 12 Sep 21 10:39 gab@0:gab_ccrw-rw-rw- 1 root sys 143, 13 Sep 21 10:39 gab@0:gab_dcrw-rw-rw- 1 root sys 143, 14 Sep 21 10:39 gab@0:gab_ecrw-rw-rw- 1 root sys 143, 15 Sep 21 10:39 gab@0:gab_f/etc/name_to_major:llt 109gab 143------------------------------------------------------启动VCSVCS只在一台系统上本地启动. 如果main.cf在各个系统上不一致,你必须手工启动或重起其它的系统.启动有需要广播的main.cf文件的系统.启动VCS:/opt/VRTSvcs/bin/hastart如果其它系统已经启动和广播, 当前系统的VCS会载入其它系统的main.cf.启动VCS并设置配置文件为stale,即使它是有效的:/opt/VRTSvcs/bin/hastart -stale这会在cluster环境中生成.stale文件如果VCS无法正常启动, 配置信息会变成stale. 如果.stale文件存在并且你需要立刻启动cluster,使用"force"选项:/opt/VRTSvcs/bin/hastart -force在启动所有系统的VCS后,必须让VCS将cluster配置信息写到磁盘的main.cf文件.这会移掉.stale文件. .stale文件在强制启动后自动被删除./opt/VRTSvcs/bin/haconf -dump -makero当一个系统加入cluster中和cluster在线更改配置时,main.cf, types.cf和include 文件被自动写入.HASTATUS状态显示校验Cluster是否正常运行:/opt/VRTSvcs/bin/hastatus (会显示实时的VCS信息)/opt/VRTSvcs/bin/hastatus -sum/opt/VRTSvcs/bin/hasys -display启动和停止服务组在系统上可以手工启动和停止服务组.hagrp -online <service group> -sys <host name>hagrp -offline <service group> -sys <host name>服务组的切换和暂停切换服务组到其它系统:hagrp -switch <Group name> -to <Hostname of other Node>暂停服务组:hagrp -freeze <Service Group> -presistent安装程序的位置man帮助信息在如下目录:/opt/VRTSllt/man/opt/VRTSgab/man/opt/VRTSvcs/man大部分的程序在:/opt/VRTSvcs/bin常用监控命令hastatus -summary 显示VCS Cluster环境的当前状态hasys -list 列出Cluster中的系统hasys -display 得到每个系统的详细信息hagrp -list 列出所有的服务组hagrp -resources <Service Group> 列出服务组的所有资源hagrp -dep <Service Group> 列出服务组的依赖关系hagrp -display <Service Group> 列出服务组的详细信息haagent -list 列出所有的代理haagent -display <Agent> 列出一个代理的详细信息hatype -list 列出所有的资源类型hatype -display <Resource Type> 列出一个资源类型的详细信息hatype -resources <Resource Type> 列出一个资源类型的所有资源hares -list 列出所有的资源hares -dep <Resource> 列出一个资源的依赖性hares -display <Resource> 列出一个资源的详细信息haclus -display 列出Cluster的属性------------------------------------------------------VCS命令设置步骤大部分命令存放在 /opt/VRTSvcs/bin.hagrp 切换系统查看服务组,服务组资源,依赖关系,属性启动, 停止, 切换, 暂停, 解冻, 禁止, 允许,刷新, 禁止和允许服务组中的资源hasys 检查系统参数列出cluster中的系统, 属性, 资源类型,资源和资源属性暂停,解冻系统haconf 导出HA配置信息hauser 管理VCS用户信息hastatus 检查Cluster状态haclus 检查Cluster属性hares 查看资源启动和停止资源, 查明状态, 清楚错误信息haagent 列出代理, 代理状态, 启动和停止代理hastop 停止VCShastart 启动VCShagui 改变Cluster配置信息hacf 生成main.cf文件. 确认本地配置信息haremajor 修改共享磁盘的Major number gabconfig 查看GAB的状态gabdiskhb 控制GAB心跳磁盘lltstat 查看llt状态其它进程:had VCS engine. 是高优先级的实时进程. hashadow 监控和重起VCS engine.halink 监控Cluster间的连接.HACF配置确认本地的配置信息有效:cd /etc/VRTSvcs/conf/confighacf -verify .生成main.cf文件:hacf -generate从main.cf生成main.cmd:hacf -cftocmd .从main.cmd生成main.cf:hacf -cmdtocf .HACONF配置文件MAIN.CF将VCS配置文件(main.cf)改为可读写:haconf -makerw将VCS配置文件改为只读.haconf -dump -makero例子:添加一个VCS用户:haconf -makerwhauser -add <username>haconf -dump -makero将一个新系统"sysa"加入服务组的系统列表中并设置优先级2:haconf -makerwhagrp -modify group1 SystemList -add sysa 2haconf -dump -makeroHASYS停止重起和切换如果系统在60秒内关机重起会导致切换为修改这个时间, 在每个系统执行:haconf -makerwhasys -modify <system name> ShutdownTimeout <seconds> haconf -dump -makero如果你不希望在重起时发生切换,将时间设成0VCS代理代理存放在/opt/VRTSvcs/bin.典型的代理包括:CLARiiON (commercial)DiskDiskGroupElifNoneFileNoneFileOnOffFileOnOnlyIPIPMultiNICMountMultiNICANFS (used by NFS server)NICOracle (Part of Oracle Agent - commercial)PhantomProcessProxyServiceGroupHBShare (used by NFS server)Sqlnet (Part of Oracle Agent - commercial)Volume这些代理会出现在进程表中:/opt/VRTSvcs/bin/Volume/VolumeAgent -type Volume/opt/VRTSvcs/bin/MultiNICA/MultiNICAAgent -type MultiNICA/opt/VRTSvcs/bin/Sqlnet/SqlnetAgent -type Sqlnet/opt/VRTSvcs/bin/Oracle/OracleAgent -type Oracle/opt/VRTSvcs/bin/IPMultiNIC/IPMultiNICAgent -type IPMultiNIC /opt/VRTSvcs/bin/DiskGroup/DiskGroupAgent -type DiskGroup/opt/VRTSvcs/bin/Mount/MountAgent -type Mount/opt/VRTSvcs/bin/Wig/WigAgent -type Wig删除VCS软件为删除VCS软件包,执行如下命令:pkgrm <VCS packages>rm -rf /etc/VRTSvcs /var/VRTSvcsinit 6MAIN.CF语法main.cf的结构如下:* include语句* cluster定义* system定义* snmp定义* service group定义* resource type定义* resource定义* resource dependency语句* service group dependency语句如下是main.cf的模板:####include "types.cf"include "<Another types file>.cf"...cluster <Cluster name> (UserNames = { root = <Encrypted password> }CounterInterval = 5Factor = { runque = 5, memory = 1, disk = 10, cpu = 25,network = 5 }MaxFactor = { runque = 100, memory = 10, disk = 100, cpu = 100, network = 100 })system <Hostname of the primary node>system <Hostname of the failover node>group <Service Group Name> (SystemList = { <Hostname of primary node>, <Hostname offailover node> }AutoStartList = { <Hostname of primary node> })<Resource Type> <Resource> (<Attribute of Resource> = <Attribute value><Attribute of Resource> = <Attribute value><Attribute of Resource> = <Attribute value>...)...<Resource Type> requires <Resource Type>...// resource dependency tree//// group <Service Group name>// {// <Resource Type> <Resource>// {// <Resource Type> <Resource>// .// .// .// {// <Resource Type> <Resource>// }// }// <Resource Type> <Resource>// }TYPES.CF语法如下是types.cf的例子:######type <Resource Type> (static str ArgList[] = { <attribute>, <attribute>, ... } NameRule = resource.<attribute>static str Operations = <value>static int NumThreads = <value>static int OnlineRetryLimit = <value>str <attribute>str <attribute> = <value>int <attribute> = <value>int <attribute>)...GROUP类型Failover服务组只能在一个系统上在线.Parallel服务组可以在多个系统上同时在线.服务组在三个条件下会在线:1. 用户发出命令2. 重起机器3. 发生切换操作通信方式VCS系统通过如下几种方式通信.1. 网络通道 (最多 8).2. 心跳盘或服务组心跳盘,GAB控制基于磁盘的通信.注: 心跳盘并不存放cluster的状态信息离线维护过程如下是如何在保证服务组在线的情况下进行文件系统维护的例子. 它包括在不影响其它资源和停止服务组的情况下停止某个资源1. haconf -makerw2. hagrp -freeze <service group> -persistent3. haconf -dump -makero现在进行维护工作,如卸载一个文件系统.如果你不希望在维护过程中监控资源,可以在维护前执行:hagrp -disableresources <service group>在维护后,重新装载文件系统4. haconf -makerw5. hagrp -unfreeze <service group> -persistent如果你禁止了一个资源,hagrp -enableresources <service group>6. haconf -dump -makero查找哪个资源还没启动.7. hastatus -sum8. hares -clear <mount resource>9. hares -online <mount resource> -sys <host name>确认服务组已经完全启动.10. hastatus -sumLOGS 日志信息VCS日志存放在:/var/VRTSvcs/log这些日志显示VCS engine和资源类型的错误.例子:-rw-rw-rw- 1 root other 22122 Aug 29 08:03 Application_A.log -rw-rw-rw- 1 root root 9559 Aug 15 13:02 DiskGroup_A.log-rw-rw-rw- 1 root other 296 Jul 17 17:55DiskGroup_ipm_A.log-rw-rw-rw- 1 root root 746 Aug 17 16:27 FileOnOff_A.log-rw-rw-rw- 1 root root 609 Jun 19 18:55 IP_A.log-rw-rw-rw- 1 root root 1130 Jul 21 14:33 Mount_A.log-rw-rw-rw- 1 root other 5218 May 14 13:16 NFS_A.log-rw-rw-rw- 1 root root 7320 Aug 15 12:59 NIC_A.log-rw-rw-rw- 1 root other 1042266 Aug 23 10:46 Oracle_A.log-rw-rw-rw- 1 root root 149 Mar 20 13:10 Oracle_ipm_A.log -rw-rw-rw- 1 root other 238 Jun 1 13:07 Process_A.log-rw-rw-rw- 1 root other 2812 Mar 21 11:45ServiceGroupHB_A.log-rw-rw-rw- 1 root root 6438 Jun 19 18:55 Sqlnet_A.log-rw-rw-rw- 1 root root 145 Mar 20 13:10 Sqlnet_ipm_A.log -rw-r--r-- 1 root other 16362650 Aug 31 08:58 engine_A.log-rw-r--r-- 1 root other 313 Mar 20 13:11 hacf-err_A.log-rw-rw-rw- 1 root root 1615 Jun 29 16:30 hashadow-err_A.log-rw-r--r-- 1 root other 2743342 Aug 1 17:12 hashadow_A.log drwxrwxr-x 2 root sys 3072 Aug 27 12:41 tmp这些标志出现在日志中.TAG_A: VCS内部信息. 需要联系客户服务.TAG_B: 指出错误和异常.TAG_C: 指出警告.TAG_D: 指出正常操作.TAG_E: 指出代理的状态.你可以通过修改资源类型的属性来提高日志的等级(TAG F-Z messages). 缺省是"error". 你可以选择 "none", "all", "debug", or "info".hatype -modify <Resource Type> LogLevel <option>手工升级维护过程1. 打开配置文件, 暂停所有的服务组, 关闭配置文件.haconf -makerwhagrp -freeze <Service Group> -persistenthaconf -dump makero2. 关闭VCS但保持服务组启动.hastop -all -force3. 确认所有系统上VCS已经停止.gabconfig -a4. 确认在磁盘上没有运行GAB.gabdiskhb -l如果有,在每个系统上删除.gabdiskhb -d5. 关闭GAB并确认它已经停止.gabconfig -Ugabconfig -a6. 找到GAB内核模块号并卸载.modinfo | grep gabmodunload -i <GAB module number>7. 关闭. 在每个系统上运行:lltconfig -U8. 找到LLT内核模块号并卸载.modinfo | grep lltmodunload -i <LLT module number>9. 在每个系统上重新命名VCS启动和停止脚本.cd /etc/rc2.dmv S70llt s70lltmv S92gab s92gabcd /etc/rc3.dmv S99vcs s99vcscd /etc/rc0.dmv K10vcs k10vcs10. 备份/etc/VRTSvcs/conf/config/main.cf.备份/etc/VRTSvcs/conf/config/types.cf.11. 删除旧VCS包.pkgrm VRTScscm VRTSvcs VRTSgab VRTSllt VRTSperl 安装新的VCS包.恢复main.cf和types.cf.12. 启动LLT, GAB和VCS.cd /etc/rc2.dmv s70llt S70lltmv s92gab S92gabcd /etc/rc3.dmv s99vcs S99vcscd /etc/rc0.dmv k10vcs K10vcs/etc/rc2.d/S70llt start/etc/rc2.d/S92gab/etc/rc3.d/S99vcs start13. 查看VCS状态.hastatushastatus -sum14. 解冻所有的服务组.haconf -makerwhagrp -unfreeze <Service Group> -persistenthaconf -dump -makeroVCS 系统名如果你经常改动系统的主机名, 最好让VCS使用唯一个名字.为了VCS不使用机器的主机名而使用自己的名字,需要在/etc/llttab 定义/etc/VRTSvcs/conf/sysname. 在main.cf中使用VCS的名字.例子:/etc/llthosts:0 sysA1 sysB/etc/VRTSvcs/conf/sysname:sysA/etc/VRTSvcs/conf/sysname:sysB/etc/llttab:set-node /etc/VRTSvcs/conf/sysnameHAD VCS版本查询had版本信息had -versionWEB 界面地址VCS http://<cluster IP>:8181/vcsVCSQS http://<cluster IP>:8181/vcsqsVCS QUICKSTART 命令VCS QuickStart只有一些简单命令:vcsqs -startvcsqs -stop [-shutdown] [-all] [-evacuate] vcsqs -grp [<group>]vcsqs -res [<resource>]vcsqs -config [<resource>]vcsqs -sysvcsqs -online <group> -sys <system>vcsqs -offline <group> [-sys <system>]vcsqs -switch <group> [-sys <system>]vcsqs -freeze <group>vcsqs -unfreeze <group>vcsqs -clear <group> [-sys <system>]vcsqs -flush <group> [-sys <system>]vcsqs -autoenable <group> -sys <system>vcsqs -usersvcsqs -addadmin <username>vcsqs -addguest <username>vcsqs -deleteuser <username>vcsqs -updateuser <username>vcsqs -intervals [<type>]vcsqs -modifyinterval <type> <value>vcsqs -versionvcsqs -helpGAB LLT 端口a GAB internal useb I/O Fencingd ODM (Oracle Disk Manager)f CFS (VxFS cluster feature)h VCS engine (HAD)j vxclk monitor portk vxclk synch portl vxtd (SCRP) portm vxtd replication porto vcsmm (Oracle RAC/OPS membership module)q qlog (VxFS QuickLog)s Storage Appliancet Storage Applianceu CVM (Volume Manager cluster feature) v CVMw CVMx GAB test user clientz GAB test kernel clientVERITAS TCP端口8181 VCS and GCM web server14141 VCS engine14142 VCS engine test14143 gabsim14144 notifier14145 GCM port14147 GCM slave port14149 tdd Traffic Director port14150 cmd server14151 GCM DNS14152 GCM messenger14153 VCS Simulator15151 VCS GAB TCP port图形界面使用指南在使用图形管理界面之前在你使用集群管理器之前,你必须:✓设置图形管理界面;✓正式设置中包含用户账号,如用户账号不存在,你必须创建一个;✓开始使用集群管理✓创建集群面板设置图形显示界面在UNIX工作站中设置界面1.键入下面命令,同意系统许可显示在桌面上:xhost +2.在创建集群管理器的地方设置外观参数DISPLAY,例如,键入下面命令显示在系统“myws”上export DISPLAY=myws:0关于集群管理器用户集群管理器有三种用户,以分配给他们的权限为基础:访问者,操作员和管理员◆如果用户账号是访问者权限,用户可以查看和使用集群,他们不可以修改设置或执行管理性任务。
超融合云数据中心架构解析

邮电设计技术/2017/06——————————收稿日期:2017-03-220引言超融合架构是为下一代云数据中心设计的横向扩展的软件定义架构,无固定中心节点,以横向扩展、软件定义、计算和存储融合、服务器端闪存为核心。
横向扩展要求数据中心基础架构构建在通用硬件上,无专用存储设备(如NAS 、SAN 等)。
随着硬件数量增加,除了计算能力,存储能力(包含容量和IOPS )也要能接近于线性的提升,这些需求传统架构(计算设备和存储设备分离)无法满足,基于传统架构封装的伪融合架构(整合成一体的机架)也不能满足。
只有使用通用硬件(x86服务器),计算和存储融合(所有节点既是计算节点也是存储节点)才能适应云计算中心按需快速扩展、大规模扩展的要求。
所以超融合架构中的存储必须是软件定义的无固定中心节点的架构。
1架构核心存储是超融合架构中最核心的部分,融合存储和Server SAN 技术给存储产业带来了变革。
通过分层存储、数据本地化等策略提升融合存储的IO 性能已经是市场上融合存储产品的普遍实现机制。
融合存储和Server SAN 架构中涉及的技术主要包含了以下几点。
超融合云数据中心架构解析关键词:超融合;软件定义存储;云数据中心;IO Fence doi :10.12045/j.issn.1007-3043.2017.06.018中图分类号:TN915.1文献标识码:A文章编号:1007-3043(2017)06-0083-03摘要:超融合解决了存储、网络、计算虚拟化的问题,将虚拟化计算、网络、存储整合到同一个系统平台。
超融合架构大幅提升了计算能力,依托其底层分布式存储,可提供数据容灾,不但解决计算的问题,同时底层的分布式存储又是一个天然的数据容灾系统。
数据的副本机制、切片算法使得当系统一个或多个节点在硬件损毁、掉电等情况下,应用不会中断,数据也不会丢失。
Abstract :Hyper-converged infrastructure solves the problems of storage,networking and virtualization.It integrates virtualization com-putation,network and storage into the same system platform.Hyper-converged infrastructure highly improved computation ability,based on underlying distributed storage,it can provide data disaster recovery to solve computational issues,its underly-ing distributed storage is a natural disaster recovery system.The data duplicate mechanism and slicing algorithm helps nodes of IT system keep working and save data when hardware breaks down and loss power.Keywords :Hyper-converged infrastructure;SDS;Cloud data center;IO fence包宇1,范文一2,操明立3(1.中国联通河南分公司,河南郑州450045;2.北京领航盛辉科技有限公司,北京100080;3.中讯邮电咨询设计院有限公司,河南郑州450007)Bao Yu 1,Fan Wenyi 2,Cao Mingli 3(1.China Unicom Henan Branch ,Zhengzhou 450045,China ;2.Beijing Linghangshenghui TechnologyCo.,Ltd.,Beijing 100080,China ;3.China Information Technology Designing &Consulting Institute Co.,Ltd.,Zhengzhou 450007,China )Analysis of Hyper-converged Cloud Data Center Infrastructure引用格式:包宇,范文一,操明立.超融合云数据中心架构解析[J].邮电设计技术,2017(6):83-85.数据通信Data Commuincation包宇,范文一,操明立超融合云数据中心架构解析83a)分层大存储池的实现。
io简单介绍

io简单介绍
IO(Input/Output)是计算机科学中一个重要的概念,它代表着计算机与外部世界之间的信息交换过程。
在这个过程中,计算机从外部获取输入信息,经过处理后输出结果。
对于计算机来说,输入是指它从外部获取的数据或信号,可以是来自键盘、鼠标、摄像头等各种设备的输入。
而输出则是计算机向外部传递的结果,可以是在屏幕上显示的图像、声音,或者是向打印机、音响等设备发送的信号。
IO的过程可以分为两个阶段:输入阶段和输出阶段。
在输入阶段,计算机接收外部的输入信号,并将其转换为计算机内部可以处理的格式。
例如,当我们在键盘上输入文字时,计算机会将按下的按键转换为相应的字符编码。
在输出阶段,计算机将处理后的结果转换为外部设备可以理解的信号,并将其发送出去。
例如,当计算机处理完一段视频后,会将视频信号发送给显示器,让我们可以观看到视频内容。
IO在计算机领域中起着至关重要的作用。
它使得计算机可以与人类进行交流和互动,让计算机成为一个强大的工具。
通过输入设备,我们可以向计算机提供指令和数据,让计算机按照我们的意愿进行工作。
通过输出设备,计算机可以将处理结果展示给我们,让我们能够获得所需的信息。
除了人机交互外,IO还包括计算机之间的数据交换。
在计算机网络中,计算机通过网络接口卡与其他计算机进行通信,实现信息的传输和共享。
这使得我们可以在不同的计算机之间传递文件、发送消息等。
IO是计算机与外部世界交流的重要方式,它让计算机能够理解我们的指令和需求,并将处理结果呈现给我们。
正是因为有了IO,计算机才能成为我们生活和工作中不可或缺的工具。
IO重定向的详细解释

首先说一下什么是I/O重定向,所谓I/O重定向简单来说就是一个过程,这个过程捕捉一个文件,或者命令,程序,脚本,甚至脚本中的代码块(codeblock)的输出,然后把捕捉到的输出,作为输入发送给另外一个文件,命令,程序,或者脚本。
如果谈到I/O重定向,就涉及到文件标识符(File Descriptor)的概念,在Linux系统中,系统为每一个打开的文件指定一个文件标识符以便系统对文件进行跟踪,这里有些和C语言编程里的文件句柄相似,文件标识符是一个数字,不同数字代表不同的含义,默认情况下,系统占用了3个,分别是0标准输入(stdin),1标准输出(stdout),2 标准错误(stderr),另外3-9是保留的标识符,可以把这些标识符指定成标准输入,输出或者错误作为临时连接。
通常这样可以解决很多复杂的重定向请求。
标准输入通常指键盘的输入标准输出通常指显示器的输出标准错误通常也是定向到显示器请看以下例子,来描述一下他们的关系#ls /dev这个命令列出/dev目录下的所有文件,在屏幕上输出结果。
这里/dev 就是作为命令ls的标准输入(从键盘输入),而打印在屏幕的结果就是标准输出(/dev目录中的内容)还是回到标题,重定向就是把标准的输入或者输出更改成其他的方式,请参看如下例子或者等同于#ls /dev 1>filename #注意:"1"和">"中间没有空格以上命令会把命令的标准输出重新定向到一个文件filename,而不是显示到屏幕上,如果不指明文件标识符,系统默认的就是1,因此1可以省略。
如果把上面例子重的">"改成">>"则表示把输出追加到filename文件的末尾,如果文件不存在则创建它。
如下#ls /dev >>filename也可以把标准错误重新定向到文件#ls -qw /dev 2>filename显然-qw是一个错误参数,通常会在显示器上报告一个错误信息,但由于把2标准错误(stderr)重新定向到了文件filename,因此显示器没有错误信息,而信息写到了文件里面以下命令是把标准输出和错误都定向到文件#ls /dev &>filename"&"在这里代表标准输出和标准错误,这里无论是正常输出还是错误信息都写到filename中了。
io模块原理

io模块原理IO模块原理:计算机与外部设备的数据交互IO(Input/Output)模块是计算机中的一个重要组成部分,其主要作用是实现计算机与外部设备的数据交互。
在计算机中,CPU是核心部件,但是CPU无法直接与外部设备进行交互,只能通过IO模块实现与外部设备的数据传输。
IO模块一般由IO接口电路、控制电路、状态寄存器、数据缓冲区等组成。
其中,IO接口电路是实现计算机与外部设备物理连接的部分,控制电路则用于控制数据的输入输出,状态寄存器用于记录IO 模块的状态信息,数据缓冲区用于存储数据。
IO模块的原理可以分为两种工作方式,分别是“程序控制方式”和“中断方式”。
程序控制方式程序控制方式是指CPU通过执行特定的程序来实现IO模块的数据输入输出。
在程序控制方式下,CPU通过向IO控制电路发送控制命令,来控制IO模块的工作状态。
当IO模块完成数据输入输出后,CPU 会通过查询状态寄存器来获取数据。
程序控制方式下的IO模块工作流程如下:1. CPU向IO控制电路发送控制命令。
2. IO控制电路接收到命令后,控制数据的输入输出。
3. 数据输入输出完成后,IO模块会将状态信息存储到状态寄存器中。
4. CPU通过查询状态寄存器来获取数据。
中断方式中断方式是指IO模块在接收到外部设备数据后,会向CPU发送中断请求,CPU则会暂停当前任务,转而处理IO模块的数据输入输出。
在中断方式下,IO模块不需要CPU的控制,而是通过向CPU发送中断请求,来实现数据输入输出。
中断方式下的IO模块工作流程如下:1. 外部设备向IO模块输入数据。
2. IO模块接收到数据后,向CPU发送中断请求。
3. CPU收到中断请求后,暂停当前任务,转而处理IO模块的数据输入输出。
4. 数据输入输出完成后,CPU会将数据写入存储器中,然后恢复之前的任务。
总结IO模块作为计算机与外部设备进行数据交互的重要组成部分,其原理也非常重要。
程序控制方式和中断方式是IO模块的两种工作方式,通过对这两种工作方式的了解,可以更好地理解计算机与外部设备的数据交互过程,从而更好地理解计算机系统的工作原理。
离散式io-概述说明以及解释

离散式io-概述说明以及解释1.引言1.1 概述离散式io是一种数据输入/输出的处理方式,其特点是将数据分散存储在多个不连续的地方,而不是集中存储在一个连续的地方。
这种处理方式可以提高系统的并发性和效率,同时减少数据传输的延迟和负载。
在离散式io中,数据的访问和处理更加灵活,能够更好地适应多任务并发处理的需求。
本文将介绍离散式io的优势、应用领域以及展望未来发展方向。
1.2文章结构文章结构部分的内容如下:文章结构部分将介绍整篇文章的框架和各个部分的内容安排。
本文包含引言、正文和结论三个主要部分。
引言部分将会概述离散式io的定义和重要性,介绍文章的目的和整体结构。
正文部分将深入探讨离散式io的概念、优势以及应用领域。
将详细阐述什么是离散式io、它的优势所在以及它在实际的应用领域中的具体情况。
结论部分将总结离散式io的重要性,并展望未来它的发展趋势和前景。
最后对整篇文章进行总结并提出结论。
1.3 目的本文的目的是探讨离散式io在计算机科学领域中的重要性和应用价值。
通过对离散式io的概念、优势以及应用领域进行详细分析,我们希望读者能够对离散式io有更深入的了解,并认识到其在提高计算机系统性能和效率方面的重要作用。
此外,本文也将展望离散式io未来的发展方向,探讨其在新兴技术领域中的潜在应用,并对其在改进数据处理和存储方面的可能影响进行展望。
通过本文的研究和分析,希望能够激发读者对离散式io的兴趣,促进相关领域的研究和发展,推动离散式io技术的进步和应用。
2.正文2.1 什么是离散式io离散式io是一种输入/输出处理方式,它将传统的连续的、顺序的数据流分割为离散的数据块进行处理。
在离散式io中,数据被划分为多个独立的单元,每个单元都可以被单独处理和传输,而不需要等待整个数据流的完整接收或处理。
离散式io与传统的连续式io相比具有更高的灵活性和效率。
由于数据被划分为独立的块,可以并行处理多个数据块,提高了系统的吞吐量和响应速度。
IO重定向的详细解释
首先说一下什么是I/O重定向,所谓I/O重定向简单来说就是一个过程,这个过程捕捉一个文件,或者命令,程序,脚本,甚至脚本中的代码块(codeblock)的输出,然后把捕捉到的输出,作为输入发送给另外一个文件,命令,程序,或者脚本。
如果谈到I/O重定向,就涉及到文件标识符(File Descriptor)的概念,在Linux系统中,系统为每一个打开的文件指定一个文件标识符以便系统对文件进行跟踪,这里有些和C语言编程里的文件句柄相似,文件标识符是一个数字,不同数字代表不同的含义,默认情况下,系统占用了3个,分别是0标准输入(stdin),1标准输出(stdout),2 标准错误(stderr),另外3-9是保留的标识符,可以把这些标识符指定成标准输入,输出或者错误作为临时连接。
通常这样可以解决很多复杂的重定向请求。
标准输入通常指键盘的输入标准输出通常指显示器的输出标准错误通常也是定向到显示器请看以下例子,来描述一下他们的关系#ls /dev这个命令列出/dev目录下的所有文件,在屏幕上输出结果。
这里/dev 就是作为命令ls的标准输入(从键盘输入),而打印在屏幕的结果就是标准输出(/dev目录中的内容)还是回到标题,重定向就是把标准的输入或者输出更改成其他的方式,请参看如下例子或者等同于#ls /dev 1>filename #注意:"1"和">"中间没有空格以上命令会把命令的标准输出重新定向到一个文件filename,而不是显示到屏幕上,如果不指明文件标识符,系统默认的就是1,因此1可以省略。
如果把上面例子重的">"改成">>"则表示把输出追加到filename文件的末尾,如果文件不存在则创建它。
如下#ls /dev >>filename也可以把标准错误重新定向到文件#ls -qw /dev 2>filename显然-qw是一个错误参数,通常会在显示器上报告一个错误信息,但由于把2标准错误(stderr)重新定向到了文件filename,因此显示器没有错误信息,而信息写到了文件里面以下命令是把标准输出和错误都定向到文件#ls /dev &>filename"&"在这里代表标准输出和标准错误,这里无论是正常输出还是错误信息都写到filename中了。
i o进程知识点总结

i o进程知识点总结I/O 进程的概念在计算机系统中,I/O 进程是一个非常重要的概念。
它是指负责管理和协调设备和人机交互方面的工作。
它主要包括以下几个方面:设备管理、文件系统管理、通信管理和人机交互。
设备管理包括对外部设备的控制和协调,比如磁盘、打印机、显示器等;文件系统管理包括文件的创建、删除、修改等操作;通信管理包括网络通信和进程之间的通信等;人机交互包括键盘输入、鼠标输入、显示器输出等。
I/O 进程在操作系统中起着非常重要的作用,它直接影响到计算机系统的性能和可靠性。
I/O 进程的特点I/O 进程具有以下几个特点:首先,I/O 进程与计算进程相对独立,它们不仅具有不同的功能,而且有不同的调度方式;其次,I/O 进程具有独特的机制,它需要与外部设备和人机交互方面密切合作;再次,I/O 进程在操作系统中具有特殊的权限和优先级,它需要具备更高的可靠性和安全性。
I/O 进程的功能I/O 进程的主要功能包括:设备管理、文件系统管理、通信管理和人机交互。
设备管理是指对外部设备进行控制和协调,包括设备的初始化、打开、关闭等操作;文件系统管理是指对文件进行管理和控制,包括文件的创建、打开、关闭、删除等操作;通信管理是指网络通信和进程之间的通信管理;人机交互是指对键盘输入、鼠标输入和显示器输出进行管理和控制。
这些功能都是 I/O 进程所需要具备的,它们直接影响到计算机系统的性能和可靠性。
I/O 进程的调度在操作系统中,I/O 进程与计算进程是分开调度的。
I/O 进程通常具有更高的优先级和特殊的调度机制,它需要与外部设备和人机交互方面进行密切合作。
通常情况下,I/O 进程具有更高的优先级,它需要优先被调度,以保证设备和人机交互的顺利进行。
在操作系统中,I/O 进程的调度策略是非常重要的,它直接关系到计算机系统的性能和可靠性。
I/O 进程的接口I/O 进程与外部设备和人机交互方面需要通过一定的接口进行通信。
通常情况下,I/O 进程通过设备驱动程序与外部设备进行通信,通过文件系统接口与文件系统进行交互,通过通信接口与网络进行通信,通过人机接口与用户进行交互。
IO测试工具之fio详解

IO测试⼯具之fio详解IO测试⼯具之fio详解本⽂章向⼤家介绍IO测试⼯具之fio详解,主要包括IO测试⼯具之fio详解使⽤实例、应⽤技巧、基本知识点总结和需要注意事项,具有⼀定的参考价值,需要的朋友可以参考⼀下。
⽬前主流的第三⽅IO测试⼯具有fio、iometer和Orion,这三种⼯具各有千秋。
fio在Linux系统下使⽤⽐较⽅便,iometer在window系统下使⽤⽐较⽅便,Orion是oracle的IO测试软件,可在没有安装oracle数据库的情况下模拟oracle数据库场景的读写。
如下是在Linux系统上采⽤fio⼯具来对磁盘进⾏的IO测试。
请在进⾏测试前先看下第4点的注意事项。
1、安装fio下载源码包:wget -P /tmp/ https://brick.kernel.dk/snaps/fio-3.0.tar.gztar -xzvf /tmp/fio-3.0.tar.gzcd /tmp/fio-3.0./configure&&make&&make install之后就可以使⽤fio了。
2、fio参数解释可以使⽤fio -help查看每个参数,具体的参数左右可以在官⽹查看how to⽂档,如下为⼏个常见的参数描述filename=/dev/vdb ⽀持⽂件系统或者裸设备,-filename=/dev/sdb或-filename=/data/fiotestdirect=1 测试过程绕过机器⾃带的buffer,使测试结果更真实rw=randwread 测试随机读的I/Orw=randwrite 测试随机写的I/Orw=randrw 测试随机混合写和读的I/Orw=read 测试顺序读的I/Orw=write 测试顺序写的I/Orw=rw 测试顺序混合写和读的I/Obs=4k 单次io的块⽂件⼤⼩为4kbsrange=512-2048 同上,提定数据块的⼤⼩范围size=5g 本次的测试⽂件⼤⼩为5g,以每次4k的io进⾏测试numjobs=30 本次的测试线程为30runtime=1000 测试时间为1000秒,如果不写则⼀直将5g⽂件分4k每次写完为⽌ioengine=psync io引擎使⽤pync⽅式,如果要使⽤libaio引擎,需要yum install libaio-devel包rwmixwrite=30 在混合读写的模式下,写占30%group_reporting 关于显⽰结果的,汇总每个进程的信息此外lockmem=1g 只使⽤1g内存进⾏测试zero_buffers ⽤0初始化系统buffernrfiles=8 每个进程⽣成⽂件的数量3、fio测试场景及⽣成报告详解测试场景:100%随机,100%读, 4Kfio -filename=/dev/vdb -direct=1 -iodepth 1 -thread -rw=randread -ioengine=psync -bs=4k -size=100G -numjobs=50 -runtime=180 -group_reporting -name=rand_100read_4k100%随机,100%写, 4Kfio -filename=/dev/vdb -direct=1 -iodepth 1 -thread -rw=randwrite -ioengine=psync -bs=4k -size=100G -numjobs=50 -runtime=180 -group_reporting -name=rand_100write_4k100%顺序,100%读,4Kfio -filename=/dev/vdb -direct=1 -iodepth 1 -thread -rw=read -ioengine=psync -bs=4k -size=100G -numjobs=50 -runtime=180 -group_reporting -name=sqe_100read_4k100%顺序,100%写,4Kfio -filename=/dev/vdb -direct=1 -iodepth 1 -thread -rw=write -ioengine=psync -bs=4k -size=100G -numjobs=50 -runtime=180 -group_reporting -name=sqe_100write_4k100%随机,70%读,30%写 4Kfio -filename=/dev/vdb -direct=1 -iodepth 1 -thread -rw=randrw -rwmixread=70 -ioengine=psync -bs=4k -size=100G -numjobs=50 -runtime=180 -group_reporting -name=randrw_70read_4k结果报告查看:[root@my_test]# fio -filename=/data/fiotest -direct=1 -iodepth 1 -thread -rw=randwrite -ioengine=psync -bs=4k -size=60G -numjobs=50 -runtime=180 -group_reporting -name=rand_100write_4k rand_100write_4k: (g=0): rw=randwrite, bs=(R) 4096B-4096B, (W) 4096B-4096B, (T) 4096B-4096B, ioengine=psync, iodepth=1...fio-3.0Starting 50 threadsrand_100write_4k: (groupid=0, jobs=50): err= 0: pid=6793: Fri Dec 11 14:32:00 2020write: IOPS=1945, BW=7782KiB/s (7969kB/s)(1368MiB/180028msec)clat (usec): min=282, max=1522.2k, avg=25587.08, stdev=79681.76lat (usec): min=282, max=1522.2k, avg=25587.68, stdev=79681.83clat percentiles (usec):| 1.00th=[ 334], 5.00th=[ 355], 10.00th=[ 367],| 20.00th=[ 383], 30.00th=[ 400], 40.00th=[ 416],| 50.00th=[ 437], 60.00th=[ 461], 70.00th=[ 506],| 80.00th=[ 586], 90.00th=[ 106431], 95.00th=[ 196084],| 99.00th=[ 362808], 99.50th=[ 404751], 99.90th=[ 750781],| 99.95th=[ 994051], 99.99th=[1317012]bw ( KiB/s): min= 7, max= 1701, per=2.07%, avg=161.41, stdev=159.66, samples=17455iops : min= 1, max= 425, avg=40.19, stdev=39.80, samples=17455lat (usec) : 500=69.21%, 750=14.97%, 1000=0.96%lat (msec) : 2=1.40%, 4=0.17%, 10=0.06%, 20=0.22%, 50=0.38%lat (msec) : 100=2.15%, 250=7.11%, 500=3.15%, 750=0.11%, 1000=0.05%lat (msec) : 2000=0.05%cpu : usr=0.03%, sys=0.23%, ctx=700195, majf=0, minf=13IO depths : 1=100.0%, 2=0.0%, 4=0.0%, 8=0.0%, 16=0.0%, 32=0.0%, >=64=0.0%submit : 0=0.0%, 4=100.0%, 8=0.0%, 16=0.0%, 32=0.0%, 64=0.0%, >=64=0.0%complete : 0=0.0%, 4=100.0%, 8=0.0%, 16=0.0%, 32=0.0%, 64=0.0%, >=64=0.0%issued rwt: total=0,350237,0, short=0,0,0, dropped=0,0,0latency : target=0, window=0, percentile=100.00%, depth=1Run status group 0 (all jobs):WRITE: bw=7782KiB/s (7969kB/s), 7782KiB/s-7782KiB/s (7969kB/s-7969kB/s), io=1368MiB (1435MB), run=180028-180028msecDisk stats (read/write):vdb: ios=0/350018, merge=0/35, ticks=0/167514, in_queue=167395, util=93.03%结果解析io=执⾏了多少M的IObw=平均IO带宽iops=IOPSrunt=线程运⾏时间slat=提交延迟clat=完成延迟lat=响应时间bw=带宽cpu=利⽤率IO depths=io队列IO submit=单个IO提交要提交的IO数IO complete=Like the above submit number, but for completions instead.IO issued=The number of read/write requests issued, and how many of them were short.IO latencies=IO完延迟的分布io=总共执⾏了多少size的IOaggrb=group总带宽minb=最⼩.平均带宽.maxb=最⼤平均带宽.mint=group中线程的最短运⾏时间.maxt=group中线程的最长运⾏时间.ios=所有group总共执⾏的IO数.merge=总共发⽣的IO合并数.ticks=Number of ticks we kept the disk busy.io\_queue=花费在队列上的总共时间.util=磁盘利⽤率4、注意事项参数-filename= 后如果接的是裸设备,如:-filename=/dev/vdb那么FIO命令对硬盘的写⼊是覆盖写⼊,写⼊的地⽅原有数据将被全部覆盖不可修复,此时你会发现你正在测试的磁盘所在的⽂件系统崩溃了或者数据库的数据被删除数据库奔溃。
ionice 手册

ionice 手册(最新版)目录1.介绍 ionice2.ionice 的功能3.使用 ionice 的方法4.示例正文ionice是一个用于管理Linux系统中I/O的工具,可以帮助用户在系统中进行I/O调度,以实现更好的性能。
ionice可以对系统中的I/O进行限制,以防止系统过载,同时还可以对I/O进行优化,以提高系统的响应速度。
ionice 具有多种功能,包括:- 限制I/O带宽:通过ionice,用户可以限制系统中每个进程的I/O 带宽,以防止进程因为过多的I/O请求而导致系统过载。
- 限制I/O延迟:ionice可以帮助用户限制系统中每个进程的I/O延迟,以确保进程能够及时响应。
- 优化I/O调度:ionice可以对系统中的I/O进行优化,以提高系统的响应速度。
使用 ionice 的方法非常简单,用户只需要在终端中输入“ionice”命令,然后指定要限制或优化的设备或进程即可。
例如,如果要限制名为“/dev/sda”的设备的 I/O 带宽,可以使用以下命令:```ionice -c 100 /dev/sda```其中,“-c”选项表示限制 I/O 带宽,“100”表示限制的带宽大小,“/dev/sda”表示要限制的设备。
下面是一个使用 ionice 的示例:假设有一个名为“process1”的进程,它的 I/O 请求非常频繁,导致系统过载。
为了解决这个问题,可以使用 ionice 来限制该进程的 I/O 带宽和延迟。
首先,使用以下命令找到该进程的 PID:```ps aux | grep process1```然后,使用以下命令来限制该进程的 I/O 带宽和延迟:```ionice -c 100 -d 100 process1```其中,“-d”选项表示限制 I/O 延迟。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SCSI-2 Reserve(预留)/Release(释放)/Reset(重置)
SCSI-2协议中客户端访问lun过程如下:
1、客户端向lun发起预留操作
2、预留操作成功后,客户端获得lun操作权限;预留失败,提示预留冲突,会继续尝试,直到预留成功。
3、客户端操作完毕后,执行释放操作,其他客户端可以预留。
I_T nexuses performing PERSISTENT RESERVE OUT service actions are identified by a registered reservation key provided by the application client. An application client may use the PERSISTENT RESERVE IN command to obtain the reservation key, if any, for the I_T nexus holding a persistent reservation and may use the PERSISTENT RESERVE OUT command to preempt that persistent reservation.
PROUT Service Actions:
All PROUT Service Actions have been implemented: REGISTER, RESERVE, RELEASE, CLEAR, REGISTER_AND_IGNORE, PREEMPT, PREEMPT_AND_ABORT and REGISTER_AND_MOVE
PROUT Reservation Types:
All PROUT Reservation Types have been implemented: Write Exclusive, Exclusive Access, Write Exclusive Registrants Only, Exclusive Access Registrants Only Write Exclusive All Registrants, Exclusive Access All Registrants
1-> write exclusive
3-> exclusive access
5-> write exclusive - registrants only
6-> exclusive access - registrants only
7-> write exclusive - all registrants
只有注册过key的主机,才能删掉其他主机的key。这个过程叫做”eject the registration of another member“。删掉别的主机的key的命令是”preempt and abort”,这是一个原子操作。被 “eject”掉的主机,由于失去了key,因此无法再去eject别的主机 在WERO模式下,之前被eject掉的主机,可以再次注册自己的key然后又具有了eject别人的key的能力。
SCSI-2访问控制主要缺点有:
1、预留操作基于路径。预留和释放必须由相同的客户端完成,一台主机不能释放另外一台主机的预留,同一主机HBA卡不能取消相同主机另外一块HBA的预留。
2、预留无法长久保留。主机重启将会丢失预留信息。
3、如果lun已经被预留,其他主机无法再预留。如果其他主机要想获得lun操作权限,必须对lun进行重置,重置操作可能会导致数据丢失。重置后释放掉lun现有的预留,重置操作由lun主动发起,原来预留主机并不知晓。
PRIN Service Actions:
All PRIN Service Actions have been implemented: READ_KEYS, READ_RESERVATION, REPORT_CAPABILITIES, READ_FULL_STATUS
********************************************************************************************************************************************************************
********************************************************************************************************************************************************************
8-> exclusive access - all registrants.
不同注册类型对应不同访问权限。与SCSI-2不同,SCSI-3释放操作根据预留密钥。不同客户端可以使用相同密钥或是不同密钥进行预留,具体可以结合永久预留类型决定。客户端可以通过抢占来获取已被永久预留的lun访问权限。SCSI-3抢占和SCSI-2重置不一样,抢占不会造成数据丢失。
硬件方式:STONITH(Shoot The Other Node in the Head), 这种方式直接操作电源开关,当一个节点发生故障时,另一个节点如果能侦测到,就会通过串口发出命令,控制故障节点的电源开关,通过暂时断电,而又上电的方式使故障节点被重启动, 这种方式需要硬件支持。
********************************************************************************************************************************************************************
WERO 设置只允许在其上注册过key的主机对该磁盘进行写操作,key当然是保存在存储硬件的controller中,而不是写在disk上 。对于某一个磁盘设备,只有一个reservation,但是可以有多个registrations。 使用 SCSI-3 技术,如果想禁止某个主机写入某块磁盘,只需简单地删除掉那个主机所注册的key。
The PERSISTENT RESERVE OUT command (see table 76) is used to request service actions that reserve a logical unit for the exclusive or shared use of a particular I_T nexus. The command uses other service actions to manage and remove such persistent reservations.
SCSI-3 PR(persistent reservation)
registration and reservation。 SCSI-3 Registration允许主机在某个磁盘设备上注册一个自己的key。而多个主机注册的key,形成了一个membership,并且建立了一个 reservation,设置reservation的类型,一般是WERO – Write Exclusive Registrants Only。
2、 集群文件系统
集群文件系统需要保证多节点同时访问存储时的数据一致性,SCSI-2/SCSI-3都可以满足,当一个节点尝试访问一个已经被预留的存储就会产生访问权限冲突。SCSI-3 PGR相比SCSI-2 Reserve/Release更能够减少访问权限冲突。
小结:
SCSI-2具体基本访问控制能力,但是无法满足Active/Active多路径环境和集群多节点访问存储的需求。SCSI-3通过引入客户端注册和操作权限分类概念,强化并行访问权限控制,弥补SCSI-2的不足。
The PERSISTENT RESERVE IN command (see table 65) is used to obtain information about persistent reservations and reservation keys (i.e., registrations) that are active within a device server.
SCSI-3 Persistent Reserve (PR)/ PREEMPT(抢占)
SCSI-3协议引入PGR(persistent group reservation)功能。在访问lun之前,客户端首先向lun注册(registration)一个预留密钥(reservation key),注册成功后客户端可以尝试进行永久预留(reserve),永久预留成功后就可以获得lun操作权限。预留密钥是一串16进制的ASCII码,最长8个字节。永久预留一共6种类型,由1、3、5、6、7、8数字表示。包括两种操作类型和三种客户类型,操作类型包括写排它和所有访问排他,客户类型包括所有客户端、已注册客户端和所属客户端。数字与永久预留类型对应关系如下:
7.1. Technical Overview of SCSI Persistent Reservations
In order to understand how Red Hat Cluster Suite is able to use SCSI persistent reservations as a fencing method, it is helpful to have some basic knowledge of SCSI persistent reservations.
********************************************************************************************************************************************************************