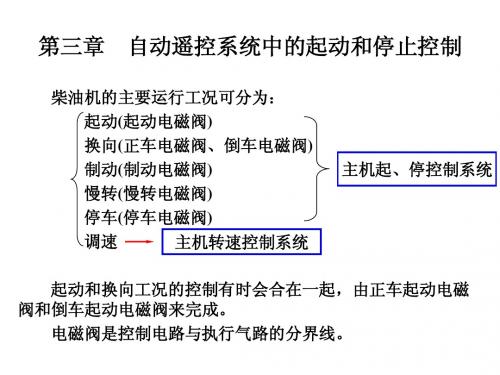
船舶操纵第三章汇总
船舶主机遥控第3章
输出非端Q
图3-1
2)继电器型 变距桨系统的特点: 图3-2 主机无需换向 主机转速恒定 图3-3 二、起动电位器的控制电路 起动电位器是用来发送主机起动燃油给定值的。 起动电位器的控制电路实际上是控制起动电位器的接通和 切除作用,并不是直接控制起动油门的大小。 图3-4
§3-3 重复起动
重复起动:当主机第一次起动不成功时,系统应能自动进 行多次起动,超过三次或四次,系统将不再允许起动,并发出 故障报警信号。 具有以上功能的控制环节,叫重复起动控制环节。 换向时间监视电路 起动时间监视电路 起动间歇延时电路 起动次数寄存电路 一、换向时间监视电路 本电路需要完成的功能:从换向机构准备动作时开始,如 果在整定的延时范围内,换向结束就是成功,反之就是失败。 本电路的输出信号: 发出换向失败报警信号 发出再次换向起动的信号
本章作业
1)在哪些情况下停车电磁阀将动作? 2)试述正车起动电磁阀的工作原理。 3)什么叫重复起动?重复起动由哪些环节组成? 4)什么情况下需要进行慢转? 5)慢转的目的是什么? 6)慢转对控制电路有什么要求?
紧急停 车开关
停车电磁阀的控制原理图: 车钟发出 停车指令 故障停车信号 (Shut down) 紧急停车信号 (EM. Stop) 车令与运转 方向不一致
停车 电磁阀
调速器停 车电磁阀
§3-2 起动控制
柴油机的起动过程根据机型的不同而有所不同。 柴油机的起动过程中有两个控制量: 油 气 起动控制电路由两部分组成: 起动电磁阀的控制 起动电位器的控制 本章所介绍的大部分电路取自于挪威KMSS集团Norcontrol 公司的AUTOCHIE II。所针对的控制机型为MAN型中速机。 一、起动电磁阀的控制电路 1)逻辑电路型 起动电磁阀的控制电路由两部分组成: 正车起动电磁阀的控制 倒车起动电磁阀的控制 逻辑电路的基本知识: 正逻辑:“1”为高电平,“0”为低电平。
船舶操纵(内河船员考试)第三章知识要点

第三章特殊情况下船舶操纵第一节大风浪中航行前的准备工作1.同一河段风、流作用方向相反时,风浪大。
风、流作用力方向相同时,风浪小;并以主流区浪最大,缓流区浪小;下风岸浪大,上风岸浪小;宽阔河段浪大,狭窄河段浪小;转潮前后一段时间内浪大。
2.船舶在大风浪中航行,产生严重摇摆(包括横摇、纵摇、垂荡运动的复合运动),面且造成拍底、甲板上浪、尾淹、螺旋桨空转等危害。
3.大风浪来临前保证船舶水密的措施,应包括:检查各水密门是否良好,不使用的一律关闭拴紧;天窗和舷窗都要盖好,并旋紧铁盖;检查甲板开口封闭的水密性,必要时进行加固;将通风口关闭;锚链管盖好。
4.排水畅通包括:排水管系、泵、阀状态良好;污水沟畅通;甲板排水孔应畅通。
5.绑牢活动物件包括:(1)起吊设备、锚设备以及一切未固定的甲板物件就系固和绑扎。
(2)散装货物应平舱。
(3)水舱、燃油舱应尽可能注满或抽空,减少自由液面。
(4)舱内和甲板的重件货物。
(5)配载时详细计算稳性,满足风浪中的航行要求。
6.在吃水差方面,既要防止螺旋桨空转,又要减轻拍底,一般以适当艉纵倾较为理想。
第二节大风浪中的操船措施7.船舶在波浪中的横摇周期与船宽成正比,与初稳性高度的平方根成反比。
8.减轻横摇的措施:调整船舶的横摇周期、改变航向和速度以调节波浪的遭遇周期。
如果船舶正横受浪时,且横摇周期与波浪周期相等,此时改变船速对波浪遭遇周期无影响,只有改变航向才能取得减轻横摇的效果。
9.船速越高,垂荡越激烈。
10.船首干舷越低,船速越大,波高越强,甲板上浪也越厉害。
11.为了减轻空转现象和防止桨叶等受损,应保持桨叶浸入水中20%-30%的螺旋桨直径,当出现空转时,可及时调整航向和速度以减轻船舶摇荡。
12.船舶在大风浪中顶浪航行,可通过下列措施减轻拍底、甲板上浪:降低航速、偏浪航行、改顶浪航行为顺浪航行、正确变换车速(交替运用快慢车)。
13.船速越快,波浪对船首的冲击力就越大;船首的面积越大(如U型首),波浪的冲击力越大;方形系数、棱形系数越大,冲击力越大。
船舶操纵性_第3章
整体表现为回转迅速发展
第三章 机动性
FR
FRn
FRt
NR NH
V
β
r
x
FHt
y
FHn
FH
第三章 机动性
船重心的运动分析: 首先,舵力和船体水动力沿船前进的方向上的分
量使船的速度逐渐减少。 另一方面,随着 FHn 在 Gy 轴上分量的增大,逐
显然 K 为单位舵角引起的角速度。K 越大,则 r 越 大,回转性就越好,故称K 为回转性指数。由于:
[ ] K = ( NvYδ − Yv Nδ ) / C C = Yv Nr + Nv (m + λ11 )u0 − Yr
所以: r = ( NvYδ − Yv Nδ )δ / C
第三章 机动性
结论: C 大,则 r 小,回转直径 DS 大,回转性差,
一、操舵后船的运动特点
⎧转舵阶段
一般地,操舵后船的运动可以分为三个阶段:⎪⎨发展阶段
1、转舵阶段
⎪⎩定常阶段
从开始转舵到舵转到规定角度为止。一般时间为8-
15s,舵角 δ < 35 。
设船在直线航行时转一右舵。随着舵的转动,有水动力作
用在舵上,力沿船的航速方向和垂直于航速方向Байду номын сангаас分量分 别为 FRt和FRn,同时又产生了绕重心的力矩 NR ,从而使
FHn + FRn + FPn = C ≠ 0
这一法向力的合力提供了向心力,所以船的重心进入匀 速圆周运动。
二、回转运动的主要特征参数:
1、回转圈——为船在回转时其重心的运动轨迹。 2、定常回转直径 DS ——定常回转圈的直径。通常以相对 回转直径DS / L 表示;对于军舰DS / L ≈ 4 。 4、纵距 Ad ——自转舵开始至船首转到90°时,重心沿初 始航线前进的距离。 5、正横距 Tr —— 船首转到90°时,重心沿初始航线的距 离。
船舶操作课件第三章

二、水动力与水动力转船力矩 1. 水动力
水动力在船体坐标系中的表达:
9.8 2 XW = W LdVW CWx 2 9.8 2 YW = W LdVW CWy 2 9.8 2 2 NW = W L dVW CWn 2
Cx 0.04 0.02
式中,Na为风力转船力矩(Nm); CNa为风力转船力矩系数; L为船长;
当已经求得船舶所受的风力、风力作用中 心以及风力角时,风力转船力矩也可按下 式计算。
Na=Fasin(lG-a) =Fasin(L/2-a)
式中,lG为船舶重心至船首的距离。
在船舶靠泊中,当船首或船尾处于一端用系 缆固定于泊位时,估算船舶所受的风力转船 力矩则应根据船舶实际受约束状态进行计算。 Na=Fasina (船首固定时) Na=Fasin(L-a) (船尾固定时)
2. 水动力转船力矩
水动力转船力矩可以表达成与水动力相 类似的形式, 即: 9.81 2 NW W C NW L2 d w 2
式中,CNW为水动力转船力矩系数,随漂 角、水深吃水比、船体水线以下形状等 的变化而变化。
三、风致偏转
船舶在风中的偏 转是船舶所受的 风力转船力矩和 水动力转船力矩 共同作用的结果。 船舶的偏转情况 可以分为两种, 即迎风偏转和背 风偏转。
Cy 0.8 0.6 0.4
Cn 0.1 0.05 0 -0.05 45 90 135 ¦ Â( 0)
0 -0.02 -0.04
45
90
135
¦ Â( 0) 0.2
-0.10 0 45 90 135 ¦ Â( 0) -0.15
船舶操纵考点总结

船舶操纵考点总结船舶操纵考点总结第一章船舶操纵性能1.船舶由静止状态进车,达到相应稳定航速的前进距离与船舶排水量成正比,与相应的稳定的船速的平方成正比,与螺旋桨推力成反比。
2.船舶由静止状态进车,达到相应稳定航速的时间与船舶排水量成正比,与相应的稳定的船速的成正比,与螺旋桨推力成反比。
3.船舶由静止状态启动主机,到达到常速,满载船的航进距离约为船长的20倍,轻载约为满载的1/2---2/3。
4.船停船距离(冲程)/冲时:船在前进中下令停止主机至船对水停住的滑行距离和时间。
5.实测停车距离(冲程)/冲时:船在前进中下令停止主机至船对水余速将至2节时或对水速度降低到保持舵效的最低速度的滑行距离和时间。
6.停车冲程与船速的平方成正比,与排水量成正比。
7.航行船舶停车后速度变化:呈非线性变化,开始时速度下降快,而后下降慢,至终为0 8.影响冲程大小的因素与:排水量、初速度、船舶阻力、污底和浅水有关。
9.减速常数是指船舶停车后船速每递减一半所需的时间,减速常数随排水量的不同而不同,一般万吨船约为4Min.10.倒车距离(冲程)/冲时:船在前进中下令倒车至船对水停住移动时的滑行距离和时间。
11.倒车停止性能:从发令开始至船对水停止移动的这段时间所前进的距离。
12.实测倒车距离(冲程)/冲时:船在前进中下令倒车至船对水停住时的滑行距离和时间。
13.倒车停船距离:万吨级6-8L,5万吨8-10L,10万吨10-13L,15-20万吨级13-16L14.航行中船舶下令倒车后,速度的变化是主机倒车转速达到最大时下降快。
15.船舶航行中进行倒车,通常在关闭油门后,等船速降至全速的60%-70%,转速降至额定转速的25%-35%,停止主机在进行倒车启动。
16.全速倒车后,右旋螺旋桨船,向右偏转,航向变化可能超过90度,压载状态较满载状态右偏量更大。
左满舵比右满舵旋回圈小。
17.主机换向所需时间:蒸汽机指示功率60-90s,内燃机制动功率90-120s,汽轮机轴功率120-180s。
船舶驾驶与操纵操作手册

船舶驾驶与操纵操作手册第一章:导论船舶驾驶与操纵操作手册旨在为船舶驾驶员提供指导和培训,以确保他们能够正确、安全地操作和操纵船舶。
本手册详细介绍了船舶的各种操纵装置、操作程序和安全要求,旨在帮助驾驶员更好地理解和掌握船舶的操纵技巧。
第二章:船舶操纵装置2.1 舵柄舵柄是舵机的控制杆,用于控制舵机的转动角度。
驾驶员通过舵柄的前后移动来改变舵机的位置,从而控制船舶的航向。
在使用舵柄时,驾驶员应注意稳定舵柄的位置,避免突然施力或过度转动舵机,以免影响船舶的操纵和稳定性。
2.2 油门油门用于调节船舶的速度。
驾驶员通过推拉油门杆来控制船舶的动力系统,调整发动机的转速。
在操作油门时,驾驶员应注意缓慢平稳的推拉,避免急速加速或减速,确保船舶运行的平稳和安全。
2.3 桨叶控制杆桨叶控制杆用于调节船舶的推进力。
驾驶员通过推拉桨叶控制杆来改变桨叶角度,从而控制船舶的前进或后退。
在操作桨叶控制杆时,驾驶员应根据船舶的速度和目标调整桨叶的位置,确保船舶行驶的平稳和方向的准确。
第三章:船舶操纵程序3.1 起锚起锚是船舶出港前的重要环节。
在起锚过程中,驾驶员应按照以下步骤进行操作:(1) 进行安全检查,确保船舶和设备状态良好。
(2) 停稳船舶,并通过桨叶控制杆控制船舶方向。
(3) 协调油门和桨叶控制杆的操作,缓慢推动船舶,直至锚抬起。
(4) 注意观察锚链的运动情况,确保锚链的顺利抬升。
(5) 当锚链完全抬升时,稳定船舶,并进行后续操作。
3.2 靠泊靠泊是船舶进港时的重要环节。
在靠泊过程中,驾驶员应按照以下步骤进行操作:(1) 判断目标泊位的位置和适用的系泊设备。
(2) 根据目标泊位的位置和潮汐情况,调整船舶的航向和速度。
(3) 确保船舶进入泊位的正确角度,并恰当地使用舵柄和桨叶控制杆来控制船舶的方向和速度。
(4) 根据泊位上的信号和指引,适时停稳船舶,并做好系泊准备。
(5) 使用缓慢且连贯的推力将船舶靠近靠泊位置,并确保船舶与靠泊点的对齐。
船舶操纵题库——第三四章

第三章外界因素对操纵的影响基本要求对船舶航行时受风、受流、受限水域、船间效应的可能影响进行正确、全面的评估。
基本内容和知识点一、风对操船的影响1.风动力与风动力转船力矩(1~18)1)风动力计算公式2)风动力系数的表达方式:列表法、曲线法、近似计算法3)风动力系数与风舷角之间的关系4)风动力作用中心与风舷角之间的关系5)风动力角与风舷角之间的关系6)风动力矩的表达方式7)船舶受风面积的估算2.水动力与水动力转船力矩(19~37)1)水动力计算公式2)水动力系数的表达方式:列表法、曲线法、近似计算法3)水动力系数与漂角之间的关系4)水动力作用中心与漂角之间的关系5)水动力角与漂角之间的关系6)风动力矩的表达方式3.风致偏转和漂移的规律(38~83)1)风中偏转分析方法(1)重心、风动力中心和水动力中心的确定(2)合力矩方向的确定2)船舶静止中受风偏转规律:正横前来风、正横后来风、偏转规律结论3)船舶前进中受风偏转规律:正横前来风、正横后来风、偏转规律结论4)船舶后退中受风偏转规律:正横前来风、正横后来风、偏转规律结论4.强风中操船的保向界限(84~93)二、流对操船的影响1.流对航速、冲程的影响(94~97)2.流对旋回、舵效的影响(98~109)三、受限水域对操船的影响1.浅水对船速、船体下沉和纵倾变化、船舶操纵性的影响(110~149)2.岸壁、航道宽度、富裕水深对操船的影响(150~187)岸吸岸推的概念、岸吸力与岸推力矩3.狭水道中船舶保向操纵(188~193)四、船间效应1.船间效应的产生的现象波荡、转头、吸引与排斥2.影响船间效应的因素船速、船间横向距离、同向与反向、船型大小。
3.预防船吸、浪损的方法及其措施第三章单项选择题1.船舶所受风力的大小A.与风舷角有关,与相对风速无关;B.与风舷角有关,与相对风速有关;C.与风舷角无关,与相对风速无关;D.与风舷角无关,与相对风速有关。
2.船舶所受风力的大小A.与风舷角有关,与船体水上面积无关;B.与风舷角无关,与船体水上面积无关;C.与风舷角有关,与船体水上面积有关;D.与风舷角无关,与船体水上面积有关。
船舶操纵知识点归纳

{(1)定常旋回阶段第一章船舶操纵性基础1、定义:保向、改向、变速。
2、船舶操纵性能:①变速性能:(1)停船性能(2)启动性能(3)倒车性能②旋回性能③保向性能④航向稳定性能3、一些主要概念:①转心:转轴与船舶首位线交点(垂足)通常位于船首之后1/3L (船长)它的位置稍有移动②通常作用在船上的力及力矩:水动力、风动力、舷力、推力③漂角:船舶运动速度与船首位线的夹角4、①水动力及其力矩:水给予船舶的运动方向相反的力②特点:船前进时,水动力中心在船中前船后退时,水动力中心在船中后③附加质量:惯性质量及惯性矩大型船舶纵向附加质量≈0.07m (m 为船的质量)附加惯性矩≈1.0Iz (Iz 为船的惯性矩)④水动力角:水动力方向与船首位线的夹角它是漂角的函数,随它漂角的增大而增大⑤水动力中心大概位置:前进平吃水:漂角为0时,中心在船首之后1/4L (船速越低,越靠近船中,前进速度为0时,在船中)后退平吃水:漂角为0时,中心距船中1/4L⑥水动力距:与力矩系数水线下面积、船体形状有关力矩系数是漂角的函数5、船体阻力摩擦阻力→主要阻力占70%—90%速度越大,其值越大(与V 2成正比)兴波阻力(低速时:与V 2成正比;船高速时:急剧增大)涡流阻力空气阻力:约占2%附体阻力6、船舶的变速性能①停船性能(冲程):与惯性有关②冲程:往往是对水移动的距离(对水移动速度为0)③一般万吨船:倒车停船距离为6—8L倒车冲程:5万:8~10L 10万吨:10~13L 15—20万吨:13~16L④当船速降到60%~70%时,转速降到25%~35%倒车⑤换向时间:从前进三到后退三所需时间汽轮机:120s~180s 内燃机:90s~120s 蒸汽机:60s~90s7、船舶的旋回性:转船阶段①旋回圈:过渡阶段—变速旋回阶段{剩余阻力:附加阻力:{②旋回初径:操舵后航向转过180°时,重心移动的横向距离一般为3~6L③旋回直径:船定常旋回时,重心轨迹圆的直径通常为旋回初径的0.9~1.2倍④进距:开始操舵到航向转过任一角度,重心移动的纵向距离通常为旋回初径的0.6~1.2倍⑤横距:指操舵让航向转过任一角度,垂心所走的横向距离约为旋回初径的1/2倍⑥制距:操舵开始时的重心位置到定常旋回率重心的纵向距离1~2L(2)船舶旋回运动是舷力的横向分量、水动力横向分量共同作用的结果(3)船舶旋回运动中的性能:降速车旋回的初始阶段:内倾;定常旋回:外倾旋回时间:旋回360°所需的时间;万吨级船旋回时间约为:6min(4)影响旋回特性的因素:①方形系数大旋回性好旋回圈小②船首水线下面积多旋回性好旋回圈小③船尾有钝材或船首瘦削旋回性差旋回圈大④舵面积大旋回性好旋回圈小⑤吃水增大横距、旋回初径增大,反移量减小⑥横倾,影响较小:低速时,向底舷一侧旋回旋回性好高速时,向高舷一侧旋回旋回性好船速低于某一值时,旋回圈加大⑦浅水:水变浅阻力加大转船舵力作用小旋回圈大旋回性变差⑧旋回圈在实际操船中的应用:反移量(kick ):向操舵相反一舷移动的距离0.1~0.2L (10%~25%L )9、操纵指数:k r r T =+.(T :追随性指数.r :r 的导数角速度<r>的加速度k:旋回性指数)阻尼力矩惯性力矩=T (T 大,惯性大,实际操舵中T 越小越好)阻尼力矩转舵力矩=k (k 大,转舵效应好,实际操舵k 越大越好)无因次的k’、T’)(')('v L T T v L k k ==(k/T 表示舵效){{第二节航向稳定性及保向性1、船向稳定性定义:船受外力干扰,干扰消失后,不用舵的前提下,船能自动恢复直线运动①恢复到原航向平行的航向航向稳定性(方向稳定性)稳定性②彻底恢复到原航行完全相同的航向上③直线稳定航向稳定性:方形系数低,长/宽高的船航向稳定性好瘦船稳定性好船首侧面积大航行稳定性差(例如:球鼻首bulous)2、保向性概念:船首线运动受外力干扰通过用船纠正使其恢复到原航向与航迹上继续做直线运动一般来说:航向稳定性好的船保向性好3、影响保向性因素瘦船好浅吃水差船尾肥大(有钝材)好干舷高差尾倾较首倾好轻载比满载保向性好(如有风,另当别论)船速高好水深浅好逆风逆流好第三节变速性能补充1、启动性能:静止定常运动定常速度v、所需距离与排水量成正比,与v2成反比,与阻力成正比经验:满载启动距离20L轻载为满载的1/2~2/32、减速性能:停车冲程:对水速度为0通常对水移动能维持舵效的最低速度,即认为停船万吨级船2节、超大船3节,即认为停船一般货船停船冲程8~20L、超大船停船冲程20L3、制动性能:前进三后退三变螺距船CPP是FPP船紧急停船距离的60%~80%总结:排水量大停船距离大船速大停船距离大污底严重停船距离小主机功率大停船距离小顺流顺风停船距离大第四节船舶操纵性试验1、旋回试验:在直航情况下,左35°或右35°,使船旋回旋回试验的目的:测定旋回圈,评价船舶旋回性2、冲程试验冲程条件:风流小水深≥3Bd 采用投掷法测定倒车使船停下(这种试验)要求船首改变90°3、螺旋试验、逆螺旋试验该试验目的,判断船舶航向稳定性好坏逆螺旋试验:求取船舶达某一回旋角速度所需舵角4、Z 性试验该试验主要评价船舶首摇抑制性,也可测定旋回性,追随性,航向稳定性获得操纵性指数第五节IMO 要求1、①对旋回性:进距<4.5L 旋回初径<5L操10°舵角航向改变10°时的进距<2.5L②对停船性:全速倒车停船距离<15L超大船倒车停船距离<20L③对于首摇抑制性、保向性3、Z 型试验结果:左右10°舷角第一超越角:a 、当L/v <10s 时:<10°b 、当L/v >30s 时:<20°c 、当10s <L/v <30s 时:[5+21(L/v )]°第二超越角:a 、当L/v <10s 时:<25°b 、当L/v >30s 时:<40°c 、当10s <L/v <30s 时:<[17.5+0.75(L/v )]°第三章车、舵、锚、缆、拖船第一节螺旋桨(propeller )1、关于阻力的补充摩擦阻力占到70%~80%,它与大约船速1.852的次方成正比2、吸入流与排出流①进入螺旋桨的流吸入流:范围广、流速慢、流线平行②螺旋桨排出的流排出流:范围小、流速快、水流旋转3、推力有船速关系(还与滑失有关)推力:排出流对船的反作用力船速一定,螺旋桨转速高推力大螺旋桨转速一定,船速高推力小4、滑失:螺旋桨对水实际速度与理论上能前进速度之差理论速度滑失滑失比=螺旋桨推力主要取决于其转速及滑失比。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
桨毂 桨叶
2
第一节 螺旋桨及其效应
1、 螺旋桨几何参数 1)直径(D)
2)螺距(P)
3)螺距比(P/D)
桨毂
桨叶
4)盘面比(Ar)
5)桨叶数
直径
3
第一节 螺旋桨及其效应
2、 螺旋桨种类 1)固定螺距螺旋桨(fixed pitch propeller ,FPP) 2)可调螺距螺旋桨(capable pitch propeller ,CPP)
式中: VP —— 为螺旋桨的 进速,即螺旋桨对水速度。
推力系数和转矩系数 与进速系数的关系是 通过螺旋桨特性曲线 表现的。
由螺旋桨特性曲线可 知,推力和转矩随进 速系数的增大而减小。
7
第一节 螺旋桨及其效应
2、船体对螺旋桨推力的影响(伴流的影响) 1)伴流及其分布
船舶在水中以船速u行驶时,其附近的水受 到船体运动的影响而产生一种追随船体运动的水 流,该水流称为伴流。
水桨)的试验结果,然后再考虑船体对螺旋桨的 影响和螺旋桨对船体的影响。 1、单独桨的推力与转矩
T DP4 n2 KT
Q DP5 n2 KQ
式中: KT —— 推力系数;KQ —— 转矩系数。 二者都是进速系数的函数。
6
第一节 螺旋桨及其效应
螺旋桨的进速系数—— J
J VP nD
四、功率与船速
PD
PB
1、功率
1)主机功率PB: 指主机发出的最大功率。 2)受到功率PD: 指主机功率经过传递装置
传至螺旋桨处的功率。 3)推进功率PT: 指船后螺旋桨发出的功率。 4)有效功率PE: 指克服阻力所需要的功率。
16
第一节 螺旋桨及其效应
2、效率
1)传递效率ηS:指收到功率与主机功率的比值。
第三章 操纵设备及其效应
何谓船舶操纵设备?
船舶本身装备的运动控制设备
推进器、舵、侧推器、锚
学习本章的任务是了解常用操纵设备 及其效应
1
第三章 操纵设备及其效应
第一节 螺旋桨及其效应
运输船舶常用的推进 装置是螺旋桨。推进 船舶航行的动力即为 推进器推力。
一、螺旋桨及其工作原理
螺旋桨构造简单、质 量轻、效率高。一般 为铜合金。
17
第一节 螺旋桨及其效应
3、螺旋桨转速与船速
商船上的船速分为海上船速和港内船速两种。
1)额定船速 (maximum speed)
也称最大船速,主机在额定功率下的所能 达到的最高船速。
2)海上船速 (sea speed)
主机按海上输出功率(常用功率)航行时 所能达到的最高船速。
3)港内船速(harbour speed)
增大滑失比有利于提高转向效率,进而提高舵效。
14
第一节 螺旋桨及其效应
4、滑失比对转矩的影响 滑失比增大螺旋桨转矩增大。 进行下列操纵时滑失比增大主机负荷将增大, 易使主机损坏。 高速前进中高转速倒车。 高速后退中高转速进车。 静止中高速进车或倒车。 大风浪或狭窄水域航行时。
15
第一节 螺旋桨及其效应
主机按港内输出功率(港内功率)航行时
所能达到的最高船速。
18
第一节 螺旋桨及其效应
五、螺旋桨横向力及其成因
螺旋桨转动时,不但产生控制船舶前后运动的 推力或拉力,而且由于螺旋桨本身的特性和船体、 舵相互间的影响,还会产生使船舶发生横移和偏转 的横向力,称为螺旋桨横向力。
螺旋桨横向力对船舶产生的效应称为螺旋桨效 应(有资料简称为车效应)
4
第一节 螺旋桨及其效应
3、 螺旋桨工作原理
排出流
吸入流
螺旋桨转矩 螺旋桨推力
1)吸入流与排出流的压力差即为螺旋桨推力。
2)主机提供的供螺旋桨旋转的力矩称为转矩。
3)吸入流是主体流、流线平行、直径较大、流 速较低。
4)排出流是主体流、流线旋转、直径较小、流
速较高。
5
第一节 螺旋桨及其效应
二、 螺旋桨推力与转矩 螺旋桨推力的计算方法一般先计算单独桨(敞
0.7´r DV P´n来自s´P´n12
第一节 螺旋桨及其效应
1)滑失的概念 理论速度与实际速度的差。
S P ´ n VP
2)滑失比的概念 滑失与理论速度的比(滑失的无因此化)。
SR
P ´ n VP P´n
1
VP P´n
1 V (1P )
P´n
以船速V代替螺旋桨进速VP即可得到虚滑失 比,其表证不同航行状态下桨负荷的参数。
19
第一节 螺旋桨及其效应
从螺旋桨横向力成因来看,可分为以下几种: 1、沉深横向力 2、排出流横向力 3、伴流横向力
13
第一节 螺旋桨及其效应
2、滑失比对推力的影响 船型和螺旋桨一定时:
船速 转速 滑失比
1)船速、转速一定时:滑失比越大,推力转矩越大。
2)船速一定时:推力与转矩与转速平方成正比; 船速为零时,滑失比最大,推力和转矩最大。
3)转速一定时:转速越低,滑失比越大,推力和 转矩越大。
3、滑失比对舵效的影响
T R RP Te T
Te
T
T
T 1
T T
T 1
t
式中:Te — 有效推力 ΔT — 推力减额
t — 推力减额系数
11
第一节 螺旋桨及其效应
三、 滑失比及其对推力的影响 螺旋桨推力的大小除了与桨的参数和船体有关
外,还与桨的运动状态,没入水的深度以及旋转 方向有关。 1、滑失比的概念
P S
ηS = PD/PB (0.96~0.99)
2)推进效率ηB:指有效功率与收到功率的比值。
ηB = PE/PD (0.35~0.75)
3)船体效率ηH:指有效功率与推进功率的比值。
ηH = PE/PT (0.95~1.05)
4)推进系数ηT:也称总效率,指有效功率与主
机功率的比值。
ηT = PE/PS= ηT × ηB×ηH (0.5~0.7)
第一节 螺旋桨及其效应
n2πr
2)螺旋桨进速
由于伴流的存在,则 螺旋桨的对水速度为:
VP
V
V
V 1 V V
VP V 1P
式中:
VP — 螺旋桨进速 V — 船速
Vω — 桨处伴流 ωP — 伴流系数
Vp
V
V
nP
10
第一节 螺旋桨及其效应
3、螺旋桨对船体的影响(推力减额)
船尾螺旋桨工作时,其产生的水流柱引起船尾 流速加快压强降低,使船体阻力产生增值,即 阻力增额ΔRP 。因此有如下公式:
伴流主要由摩擦伴流,势伴流和兴波伴流组 成。摩擦伴流是主要成分。
8
第一节 螺旋桨及其效应
伴流的分布
00
大
00
0.80 1.00 0.60 0.40 0.20
1.00 0.80 0.20 0.400.60
左右对称
900
0.10 900
0.10
1800
V型船尾的伴流分布
小
0.05
1800
U型船尾的伴流分布 9