行走马达内部构造图
图示振动马达 微型马达 手机马达工作原理资料(12页)

实心马达与空心马达
实心马达与空心马达
钱币型马达零件构造图
扁平马达操作原理
扁平马达-全圆和半圆转子区别
半圆转子
全圆转子
3极马达和5极马达(2)
正常接触(3P )
瞬时短路接触(3P )
3极马达和5极马达(2)
正常接触(5P )
续 瞬时短路接触(5P )
刷片 极片
Enlrage
+12v 4v 6v 4v
6v 4v
+12v
6v 6v
短路,4 V
6v 6v
0v
0v
极片与刷片的瞬时短路接触时,产生火花, 5P 的瞬时短路电压小于 3P 的 瞬时短路电压。
马达工作原理
空心马达零件构造图
圆柱马达操作原理
1)马达是利用了线圈所受“电磁力”而旋转的 ; 2) 电磁力:当电流通过线圈于磁场之中时,线圈受到磁场的作用力, 这种力 量被称之为“电磁力” 3)当线圈被输入电流,电流方向为 X 时,根据“佛莱明左手法则”,线圈将被 向上推动;同时,电流方向为 Y 时,线圈将被向下推动。这两个力相互作用, 达到平衡,使马达旋转起来。
马达振动原理
1) 马达在旋转时,半圆型的偏心铁跟着转子一起转动,产生“离心力” 2) 振动力G 的变化与哪些因素有关?
振动力G=MRV 2 . R= 偏心铁的半径, m= 偏心铁的重量, v=偏心铁的旋转速度
3极马达和5极马达(1)
3P
ห้องสมุดไป่ตู้
5P
3P 马达损耗60 °的线圈,5P 马达损耗36 °的线圈。
挖掘机行走马达原理[整理版]
![挖掘机行走马达原理[整理版]](https://img.taocdn.com/s3/m/736590525a8102d276a22f61.png)
挖掘机行走马达原理[整理版]挖掘机行走马达原理行走马达工作原理中大型履带式挖掘机的机重一般都在20t以上,机器的惯性很大,在机器起步和停止的过程中会给液压系统带来比较大的冲击,因此,行走控制系统必须改善以适应这种工况。
行走马达普遍采用高速马达加行星减速机或摆线针轮减速机,而液压马达部分的回路的控制有其特点。
行走马达的控制回路见图1,该马达配备了高压自动变量装置,当挂上高速挡时,回路接手动变速油口来油,推动变速阀左移,使马达变为小排量;如果行驶阻力增大致使油压升高到设定值时,油液推动变速阀右移,马达自动变为大排量低速挡,以增大扭矩。
因此这种马达可以随着行走阻力的变化而自动变换挡位。
除了马达可以变速之外,对马达的控制主要由马达控制阀完成,下面结合结构原理图(见图2)分析其工作原理。
假设A口进油,马达旋转,马达控制阀动作如下:(1)打开单向阀,液压油进入马达右腔。
(2)液压油通过节流孔进入平衡阀,并使其左移,接通制动器油路,使制动器松开,这个动作还接通了马达B口的回油油路。
(3)液压油通过安全阀的中间节流孔进入缓冲活塞腔,将缓冲活塞推到左侧。
如果此时系统压力超过此安全阀的设定压力(10.2MPa),安全阀将在瞬间打开,起到缓冲作用。
(4)如果马达超速(例如下坡时),泵来不及供油,则使A口压力降低,平衡阀在弹簧力作用下向右移动,关小马达的回油通道,从而限制马达的转速。
注意到行走马达控制阀内部有2个结构完全相同的安全阀(见图3和图4),它们在挖掘机开始行走以及制动时将起到重要的缓冲作用。
下面分析它的工作原理。
当A 口不供油时平衡阀回到中位,由于机器惯性的影响使马达继续旋转,马达的功能转换为泵。
由于平衡阀的封闭致使B口压力升高,压力油通过左安全阀中间的节流孔进入缓冲腔,推动缓冲活塞右移,同时打开左安全阀向A腔补油。
当缓冲活塞移动到最右端后,B腔压力上升,左安全阀完全关闭。
如果压力进一步升高,B腔压力作用在右安全阀上,它限制了马达的最高压力(41.2MPa),此压力就是最大制动压力。
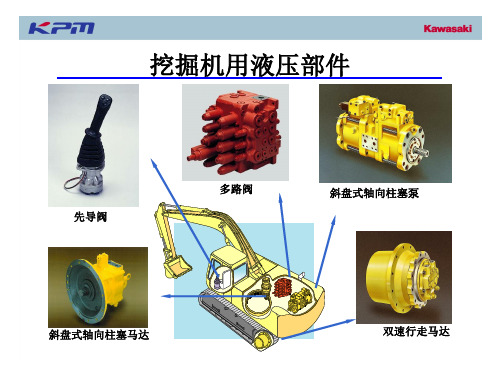
挖掘机概述-构造(完整详细版)
液压挖掘机的结构
托链轮 驱动轮
履带 支重轮 行走支架 轨链
液压挖掘机内部构造示意图
液压挖掘机的结构
液压泵
液压挖掘机的结构
挖掘机配备的为斜轴式柱塞泵与斜盘式柱塞泵 液压挖掘机的结构
控制阀
液压挖掘机的结构
液压挖掘机的结构
行走马达(三级行星减速)
回转支撑
液压挖掘机的结构
液压挖掘机的结构
液压挖掘机的常用工作参数
★ 第12代 ZX200( 2001年底)150马力 350Kg/cm2
★ ZX200-3 于2006年闪亮登场
挖掘机历史
❖ZX-3采用新型电喷发动机符合欧3排放, 采用新E模式,高效的新型液压系统 ( HIOS Ⅲ ),新机型ZX200-3与现机型 ZX200比较,斗杆回收速度提高 20 % , 燃油消耗量降低 13%。
日立挖掘机的演化历程
挖掘机历史
第1代 UH06-2型(1968年8月) 85马力 动力传递方式为链传动
175Kg/cm2
第2代 UH06-2型 (1970年11月) 85马力 变量油泵·行走部分不用加润滑脂
175Kg/cm2
第3代 UH06D 型 (1971年9月) 93马力
175Kg/cm2
动力传递方式为行走马达直接连接式,把小臂作为标准设备
1930年日本最早的电动挖掘机50K问世
1949年日立U05型挖掘机问世
美国开发
神户制钢所 日立制作所
1961年 35型
液 1963年 油谷 TY45型(轮式) 压 式 1964年 日钢 RH35型
时 代
1965年
UH03型开始生产和销售
1967年 UH06型开始生产和销售
川崎液压系统
④
加速
急停止
緩やかに減速
高圧
低圧
真空
超高圧
低圧
高圧
熱
.
回转马达回路 (防反转阀)
①
加速
②
減速・停 止
③
逆転
④
停止
高圧
低圧 低圧
高圧 低圧
高圧
熱
熱
.
斜盘柱塞回转马达
M5X–RG 系列
1. 结构简单 2. 省材设计 3. 无震特性提高
通过新的回流机械 材料浪费削减15% (M5X130 与 M2X120相比)
PVD系列 :RCV 系列 (脚先导阀)
.
斜盘柱塞泵
.
K3V 串联式柱塞泵
for mobile applications
.
主泵原理图 Main pump drawings
.
K3V 系列
斜盘式柱塞泵 可变排量 高压 开式 使用规格
.
a1
Dr
a4 Pi1
典型安装
a1
a2
B1
Dr
KAWASAKI
测压口 防反转阀
补油管
泻油管
压力开关
延时阀
工作油管
.
溢流阀
.
回转系统原理图
A,B:液压马达主油口 M:液压马达补油口 Dr:马漏油口 PX:回转控制口 PG:先导控制口
.
M5X平面图
.
斜盘马达的构造
配油盘
壳体
滑靴 柱塞
缸体 驱动轴
分离片
摩擦片.
制动活塞
回转马达的回路(溢流阀・补油口)
①
②
③
行走马达
回转马达 斗杆油回缸 转优先阀
4负流量控制国产中型挖掘机行走马达总成(纳博特斯克CM35VL)结构原理分析
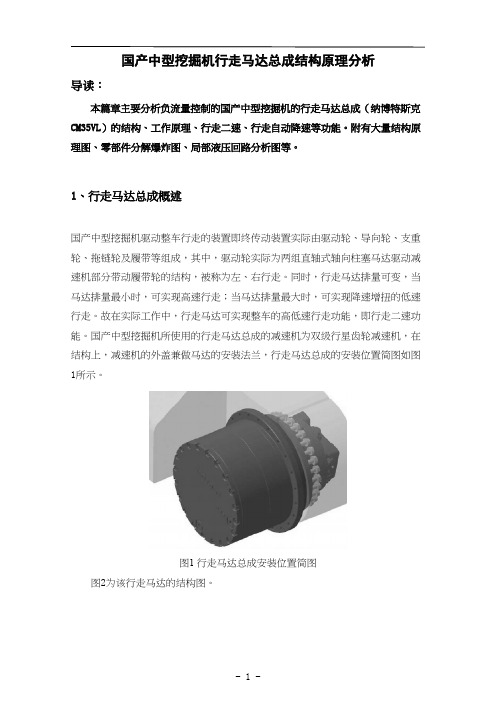
国产中型挖掘机行走马达总成结构原理分析导读:本篇章主要分析负流量控制的国产中型挖掘机的行走马达总成(纳博特斯克CM35VL)的结构、工作原理、行走二速、行走自动降速等功能。
附有大量结构原理图、零部件分解爆炸图、局部液压回路分析图等。
1、行走马达总成概述国产中型挖掘机驱动整车行走的装置即终传动装置实际由驱动轮、导向轮、支重轮、拖链轮及履带等组成,其中,驱动轮实际为两组直轴式轴向柱塞马达驱动减速机部分带动履带轮的结构,被称为左、右行走。
同时,行走马达排量可变,当马达排量最小时,可实现高速行走;当马达排量最大时,可实现降速增扭的低速行走。
故在实际工作中,行走马达可实现整车的高低速行走功能,即行走二速功能。
国产中型挖掘机所使用的行走马达总成的减速机为双级行星齿轮减速机,在结构上,减速机的外盖兼做马达的安装法兰,行走马达总成的安装位置简图如图1所示。
图1 行走马达总成安装位置简图图2为该行走马达的结构图。
1-平衡阀;2、3-过载阀;4、5-进油单向阀;6-梭阀;7-二速阀芯;m1-配流盘;m2-摩擦片;m3-分离片;m4-柱塞;m5-滑靴;m6-二速控制活塞;m7-制动活塞;m8-制动弹簧;m9-缸体;m10-主轴A、B口-马达主工作油口;Ps口-二速阀芯换向油口;Dr口-马达壳体排放口;Tin口-备用壳体排放口;Pp口-工艺丝堵口;Pm1、Pm2-马达测压口图2 行走马达结构图该机型使用的行走马达总成基本参数如表1所示。
表1 行走马达总成基本参数型号纳博特斯克CM35VL马达排量(mL/r)82.4(高速)/140.5(低速)行走溢流压力(MPa)34.3速度转换压力(MPa)25.5液压油温度范围(℃)-20~902、行走马达基本工作原理行走马达基本结构与回转马达基本相同,同为直轴式轴向柱塞马达,可参考回转马达相关章节描述,故行走马达本体的基本工作原理不再赘述。
与回转马达基本结构稍有不同的是,左、右行走马达均为变量马达,即行走马达斜盘倾角可变,马达排量可变,但其排量只可以处于其最小排量和最大排量两种排量状态上。
工程机械结构认知-挖掘机液压马达整体结构认知
图5-3 挖掘机回转马达的位置示意图
二、任务实施
•
操作步骤
(2)对照图5-4、图5-5,在车体上指认回转马达上油管及油 口的位置及名称,并口述它们的作用。
图5-4 挖掘机回转马达上油管油口示意图1
二、任务实施
•
操作步骤
一、理论知识准备 回转马达简介
图5-1 回转马达工作原理
一、理论知识准备
行走马达简介
1)行走马达总成的作用 行走马达总成包括行走马达、制动阀和停车制动器。 ①将主泵输出的压力油的液压力转换成回转运动。 ②制动阀的作用(制动阀包括安全吸油阀、平衡阀):控制 当行走马达停止时由于车体的惯性而产生的行走马达还要回转的 惯性力,顺利地制动,使其停止。
一、理论知识准备
回转马达简介
F力矢量分成径向分力F1,F2,并被继续传送经由活 塞(5)到气缸体(4),产生一个旋转扭矩,使接合到输 出驱动轴(6)上的气缸体旋转。上死点节门(A)是高压 旋转周期的起点:在180°时, 活塞移动出气缸孔,顺着旋 转斜盘滑动到下死点节门(B),然后它们开始移回气缸 孔内,放出低压油到回流线路。如果供油口和回油口互换, 回转马达会以反方向旋转。
图5-7 回转液压马达构造图
二、任务实施
•
操作步骤
(5)结合图5-8、图5-9准确指认挖掘机中心回转接头各油口 的名称位置,并口述其功用。
图5-8 挖掘机回转马达中心回转接头实物图
二、任务实施
•
操作步骤
图5-9 中心回转接头的油路连接示意图
二、任务实施
•
操作步骤
(6)结合图5-10准确指认挖掘机行走马达的名称位置,并口 述其功用。
行走马达工作原理

行走马达工作原理行走马达是一种常用于工业机械和车辆中的驱动装置,它能够将液压或者气压能转换为机械能,从而实现机械或者车辆的运动。
行走马达通常由马达本体、转子、定子、油封、轴承和传动装置等组成。
1. 马达本体马达本体是行走马达的核心部份,它通常由外壳、转子和定子组成。
外壳起到支撑和保护内部零部件的作用,同时也起到密封的作用,防止液压或者气压泄漏。
转子是马达中的旋转部份,通常由齿轮或者齿条组成,其作用是将输入的液压或者气压能转变为机械能。
定子是马达中的固定部份,通过定子的定位和控制,使转子能够按照预定的轨迹旋转。
2. 工作原理行走马达的工作原理基于液压或者气压的力学原理。
当液压或者气压通过管道输入马达时,会产生一定的压力,这个压力会作用于马达中的转子。
转子受到压力的作用后,会开始旋转,通过齿轮或者齿条的传动,将转动的力转化为机械能,从而推动机械或者车辆的运动。
3. 油封和轴承为了保证马达的正常运行,油封和轴承起着重要的作用。
油封通常安装在马达的转子轴上,起到密封液压或者气压的作用,防止泄漏。
轴承则用于支撑和定位转子轴,减少磨擦和磨损,保证马达的稳定运行。
4. 传动装置传动装置是行走马达与机械或者车辆其他部件之间的连接装置,它通过齿轮、链条或者联轴器等方式,将马达的旋转力传递给其他部件,实现机械或者车辆的运动。
总结:行走马达是一种将液压或者气压能转换为机械能的驱动装置,通过马达本体中的转子和定子的配合,将输入的液压或者气压能转变为旋转力,再通过油封、轴承和传动装置等部件的配合,将旋转力传递给机械或者车辆,实现其运动。
行走马达在工业机械和车辆中具有广泛的应用,其工作原理的理解对于设计和维护行走马达的工程师来说至关重要。
挖掘机行走马达切剖图

f1
•
•
•
节 流 孔
帝人制机
左安全阀 f
1. 2. 重要提示:马达停止转动时A口变为吸油腔,压力最低。 马达初始停止转动时,马达B口的压力作用在左安全阀 f 的 a 口(整个圆面积), 阀杆左移,将油泄到 b 口(注意 b 口与马达的A口相通)。当缓冲活塞移到最右端 后,c 口压力上升,由于阀杆的直径差,在弹簧力和压差力作用下阀杆右移,安全 阀 f 关闭。此时的压力叫做一级压力。 这个过程很短暂,目的是消除B口的脉冲压力,防止A口吸空。
帝人制机
行走马达 控制阀
1. 2. 假设马达A口进油。 行走时打开单向阀327进入 马达右腔。 同时通过节流孔进入阀杆 329使其左移,打开行走制 动器油路,使行走制动器 松开。这个动作还打开了 马达B口的回油路。 同时还通过右面安全阀 f1 的中间节流孔进入缓冲活 塞腔,将缓冲活塞381推到 左侧。此时安全阀 f1 有一 个短暂的开启动作。
3.
接缓冲活塞 C
泄到马达A口
马达B口来油
b
a
阀杆
随着缓冲活塞移到最右端 ,该腔压力逐渐升高。
b
c
a
直径大
直径小
a→b,开启压力10.2MPa
右安全阀 f1
1. 2. 3. 重要提示:马达停止转动时A口变为吸油腔,压力最低。 安全阀 f 完全关闭后,马达B口的压力作用在右安全阀 f1 的 b 口(大直 径减去小直径的环行面积),将油泄到 a 口(注意 a 口与马达的A口相通 )。此时的这个压力叫做二级压力,也就是最大制动压力。 整个过程看出,正常行走时,该阀也有一个短暂的打开过程,但是马上 就关闭了。起到了启动平稳,制动时吸收压力脉冲的作用。
f1
【柳工 挖掘机】行走马达切剖图

节流孔
阀杆
回油
本节内容结束
接缓冲活塞
泄到马达A口 C
b
马达B口来油
ab
a
阀杆 直径大
直径小
c
随着缓冲活塞移到最右端 ,该腔压力逐渐升高。
a→b,开启压力10.2MPa
右安全阀 f1
1. 重要提示:马达停止转动时A口变为吸油腔,压力最低。 2. 安全阀 f 完全关闭后,马达B口的压力作用在右安全阀 f1 的 b 口(大直
径减去小直径的环行面积),将油泄到 a 口(注意 a 口与马达的A口相通 )。此时的这个压力叫做二级压力,也就是最大制动压力。
帝人制机
f1
行走马达 控制阀
• 如果下坡时马达超 速,泵供油不及使 A口压力降低,阀 杆329在弹簧力作 用下向右移动,关 小马达的回油通道 ,从而限制马达的 转速。所以阀杆 329叫平衡阀。
阀杆右移
行走马达 控制阀
• A口不供油时马达停止转动。而机器 惯性影响使马达继续旋转,马达的
f1
功能转换为泵。主阀杆的封闭致使B
3. 整个过程看出,正常行走时,该阀也有一个短暂的打开过程,但是马上 就关闭了。起到了启动平稳,制动时吸收压力脉冲的作用。
接缓冲活塞 C
马达B口来油
b
泄到马达A口
ab
a
该腔变为吸油腔 ,压力最低。
直径大
直径小
c
b→a,开启压力41.2MPa
行走安全阀
缓冲活塞 孔
阀体 弹簧
节流孔
滑阀
节流孔
压 力 油
口压力升高,压力油通过左安全阀 f
中间的节流孔进入缓冲腔,推动缓
冲活塞391右移,同时安全阀 f 打开
向A腔补油,消除B口脉冲压力的同
行走马达工作原理

行走马达工作原理行走马达是一种常用于工业机械设备和汽车等领域的驱动装置,它能够将电能转化为机械能,实现物体的移动。
行走马达采用了电机和传动装置的组合,通过电能输入和机械结构的协同作用,实现驱动力的产生和物体的行走。
一、行走马达的组成行走马达主要由以下几个部分组成:1. 电机:行走马达中常用的电机是直流电机,它能够将电能转化为机械能。
直流电机由电枢和永磁体组成,当电流通过电枢时,会产生磁场,与永磁体的磁场相互作用,从而产生转矩,驱动行走马达的运动。
2. 传动装置:传动装置是行走马达中的重要组成部分,它能够将电机产生的转矩和转速传递给驱动轮或链轮,从而实现物体的行走。
常见的传动装置包括齿轮传动、链传动和带传动等。
3. 驱动轮:驱动轮是行走马达中的关键部件,它与地面接触,通过摩擦力将马达产生的转矩传递给地面,从而推动物体的行走。
驱动轮的材料通常选择耐磨、耐压的橡胶或金属材料。
4. 控制系统:控制系统是行走马达中的重要组成部分,它能够控制电机的转速和转向,实现行走马达的精确控制。
控制系统通常包括电子控制器、传感器和执行器等。
二、行走马达的工作原理行走马达的工作原理可以简单描述为以下几个步骤:1. 电能输入:将电能输入行走马达的电机中,通过电源供给电流。
电流经过电枢产生磁场,与永磁体的磁场相互作用,产生转矩。
2. 传动装置工作:电机产生的转矩通过传动装置传递给驱动轮。
传动装置可以根据需要选择不同的传动比例,以实现不同的速度和转向。
3. 驱动轮与地面摩擦:驱动轮与地面接触,通过摩擦力将转矩传递给地面。
地面对驱动轮产生的反作用力将物体推动向前。
4. 控制系统控制:控制系统监测行走马达的工作状态,根据需要调整电机的转速和转向。
通过控制系统的精确控制,可以实现行走马达的行走路径和速度的调整。
三、行走马达的应用领域行走马达广泛应用于工业机械设备和汽车等领域,具有以下几个优点:1. 高效性:行走马达能够将电能转化为机械能,实现高效的能量转换。
行走马达工作原理

行走马达工作原理一、引言行走马达是一种常用于机械设备中的电动执行器,其主要功能是将电能转化为机械能,从而实现设备的行走或者挪移。
本文将详细介绍行走马达的工作原理,包括结构组成、工作原理和应用领域。
二、结构组成行走马达通常由以下几个主要部份组成:1. 外壳:行走马达的外壳通常由金属材料制成,具有良好的强度和耐用性,能够保护内部的电子元件。
2. 机电:行走马达的核心部份是机电,它由定子和转子组成。
定子是固定不动的部份,其中包含绕组和磁铁。
转子是可旋转的部份,通常由永磁体制成。
3. 减速装置:为了提高行走马达的扭矩和降低转速,通常会在机电输出轴上安装减速装置。
减速装置可以采用齿轮、链条或者带传动等方式。
4. 传感器:行走马达通常配备有传感器,用于检测行走马达的位置、速度和负载等参数。
传感器可以是光电传感器、霍尔传感器或者编码器等。
5. 控制器:行走马达的控制器是整个系统的大脑,负责接收传感器的信号,并根据预设的程序控制机电的转动和行走方向。
三、工作原理行走马达的工作原理可以概括为以下几个步骤:1. 电源供电:行走马达通过外部电源供电,通常使用直流电源。
电源的电压和电流要根据行走马达的额定参数进行选择。
2. 控制信号输入:控制器接收来自外部的控制信号,包括行走方向、速度和住手等指令。
3. 机电驱动:根据控制信号,控制器会向机电施加适当的电流和电压,使机电开始转动。
电流的大小和方向决定了机电的转速和转向。
4. 磁场产生:在机电的定子中,通电的绕组会产生一个磁场。
这个磁场与转子中的永磁体相互作用,产生一个力矩,使转子开始转动。
5. 转动传递:转子的转动通过减速装置传递给行走马达的输出轴,从而驱动设备进行行走或者挪移。
6. 位置和速度反馈:传感器会不断监测行走马达的位置和速度,并将这些信息反馈给控制器。
控制器根据反馈信号进行调整,以保证行走马达的稳定运行。
四、应用领域行走马达广泛应用于各种机械设备中,包括工业机器人、自动化生产线、物流设备、农业机械、建造机械等。
行走马达工作原理
行走马达工作原理行走马达是一种用于驱动机械设备移动的装置,它通过将液压能转化为机械能来实现机械设备的行走功能。
行走马达通常由液压马达、减速器和行走轮组成。
液压马达是行走马达的核心部件,它将液压能转化为机械能。
液压马达的工作原理基于液压力和流体动力学原理。
当液压油进入液压马达时,液压油的压力会在液压马达内部产生动力,推动马达的转子旋转。
液压马达内部的转子由多个齿轮或叶片组成,当液压油作用于齿轮或叶片时,它们会开始旋转。
转子的旋转产生的力矩通过马达的输出轴传递给减速器。
减速器是行走马达的另一个重要组成部分,它通过减速和增加扭矩的方式将马达的输出轴转速和力矩适配到机械设备的要求。
减速器通常由齿轮或链条传动系统组成,它们将马达的高速低扭矩输出转化为机械设备需要的低速高扭矩输出。
减速器的设计取决于机械设备的行走速度和负载要求。
行走轮是行走马达的最终输出部分,它们与地面接触,通过摩擦力将机械设备推动或拉动。
行走轮通常由橡胶或金属制成,具有良好的抓地力和耐磨性。
它们通过与地面的摩擦力来提供行走马达的牵引力和推动力。
行走马达的工作原理可以通过以下步骤总结:1. 液压油进入液压马达,产生压力。
2. 压力推动马达内部的转子开始旋转。
3. 旋转的转子通过输出轴传递力矩给减速器。
4. 减速器将高速低扭矩输出转化为机械设备需要的低速高扭矩输出。
5. 行走轮与地面接触,通过摩擦力提供牵引力和推动力,实现机械设备的行走功能。
行走马达具有以下优点:1. 高效性:行走马达通过液压能转化为机械能,能够提供高效的动力输出。
2. 可调性:通过调整液压马达的供油量和压力,可以实现行走马达的速度和扭矩的调节。
3. 负载适应性:减速器可以根据机械设备的负载要求进行设计,确保行走马达输出的扭矩和速度满足机械设备的需求。
4. 耐用性:行走马达的关键部件采用高强度材料制造,具有较高的耐磨性和抗腐蚀性,能够在恶劣的工作环境下长时间运行。
总结起来,行走马达是一种通过将液压能转化为机械能来实现机械设备行走的装置。
行走马达工作原理
行走马达工作原理一、概述行走马达是一种用于驱动机械设备行走的装置,广泛应用于工业、农业和建筑等领域。
其工作原理是通过电动机将电能转化为机械能,驱动行走马达的内部构件实现运动,从而实现设备的行走功能。
二、结构组成行走马达主要由以下几个部分组成:1. 电动机:行走马达的核心部件,通过电能转化为机械能,提供动力。
2. 齿轮箱:用于将电动机的转速转换为合适的转矩,以满足行走马达的工作需求。
3. 驱动轴:将电动机的输出转矩传递给行走马达的内部构件,推动设备行走。
4. 行走马达壳体:将行走马达的内部构件包裹起来,保护和固定内部构件。
三、工作原理行走马达的工作原理可以简单分为以下几个步骤:1. 电能输入:将电能通过电源输入到行走马达的电动机中。
2. 电动机转动:电能驱动电动机转动,电动机内部的线圈在电磁场的作用下产生力矩。
3. 力矩传递:电动机的力矩通过齿轮箱传递给驱动轴,转化为机械能。
4. 驱动行走:驱动轴将机械能传递给行走马达的内部构件,推动设备行走。
5. 控制系统:通过控制电动机的电流、电压等参数,调节行走马达的转速和转向,实现对设备行走的控制。
四、工作特点行走马达具有以下几个工作特点:1. 高效节能:行走马达采用电能作为驱动能源,相对于传统的燃油驱动装置,具有更高的能量转化效率和更低的能量损耗。
2. 精确控制:行走马达可以通过调节电动机的电流、电压等参数,实现对行走速度和转向的精确控制,适应不同工作场景的需求。
3. 轻巧紧凑:行走马达的结构设计紧凑,体积小、重量轻,便于安装和携带。
4. 高承载能力:行走马达的内部构件经过优化设计,能够承受较大的载荷,适用于各种工作环境和工况。
5. 高可靠性:行走马达采用先进的制造工艺和材料,具有较高的耐磨性、耐腐蚀性和抗震性,能够在恶劣条件下长时间稳定工作。
五、应用领域行走马达广泛应用于各个领域,主要包括以下几个方面:1. 工业领域:行走马达被广泛应用于各类工业设备,如起重机、挖掘机、装载机等,用于推动设备的行走和转向。
三一挖掘机结构组成

空调(注意事项)
• 新安装空调时给系统加30毫升左右冷冻油 • 软管应采用扎带加海棉合理固定,以防磨损 • 安装压缩机支架时螺钉要涂乐泰防松胶 • 压缩机皮带轮槽中心线与柴油机皮带轮槽中
中央回转接头是联接回转平台与底盘油路的
液压元件,它保证回转平台旋转任意角度后, 行走马达还能正常配油,现用回转接头是5通。
中央回转接头图片
第二章 工作装置
工作装置是液压挖掘机的主要组成部分,
目前SY系列挖掘机配置的是反铲工作装置, 它主要用于挖掘停机面以下的土壤,但也可以 挖掘最大切削高度以下的土壤,除了可以挖坑、 开沟、装载外还可以进行简单平整场地工作。 挖掘作业适应于开挖Ⅰ~Ⅳ级土,Ⅴ级以上用 液压锤或需爆破手段。 反铲工作装置由动臂、斗杆、铲斗、摇杆、 连杆及包含动臂油缸、斗杆油缸、铲斗油缸在 内的工作装置液压管路等主要部分组成。
驱动轮, 支重轮, 托链轮, 履带
导向轮与张紧装置
张紧装置
张紧装置
注油原理
张紧原理
车架总成
车架总成(即履带行走架总成)为 整体焊接件, 采用X 形结构,其主要优 点是具有高的承载能力. 车架总成由 左纵梁(即左履带架)、主车架(即 中间架)、右纵梁(即右履带架)三 部分焊接而成. 车架总成的重量为2吨.
•格拉默座椅生产
•座椅型号为DS 85H/L
•机械悬浮式座椅
•载人重量50-130Kg
•操纵手柄、座椅前后 调节范围为210mm。 •高度调节范围为3级, 60mm。调节方式为往上 提座椅。 •靠背角度调节范围为 147°
座椅
3.2 挖掘机动力装置和动力传动系统
行走马达工作原理
行走马达工作原理一、引言行走马达是一种常见的电动机,被广泛应用于各种挪移设备和机械装置中。
本文将详细介绍行走马达的工作原理,包括其结构组成、工作原理和应用领域等方面的内容。
二、结构组成行走马达通常由以下几个主要部件组成:1. 外壳:行走马达的外壳通常由金属材料制成,用于保护内部部件,并提供结构支撑。
2. 定子:定子是行走马达的固定部件,由一组绕组和铁芯组成。
绕组通常由导电材料制成,通过电流产生磁场。
3. 转子:转子是行走马达的旋转部件,通常由永磁体或者电磁铁制成。
当定子产生磁场时,转子会受到磁力作用而旋转。
4. 轴承:轴承用于支撑转子,并减少磨擦损耗。
5. 端盖:端盖用于固定轴承和密封行走马达内部。
三、工作原理行走马达的工作原理基于电磁感应和磁力作用。
具体步骤如下:1. 电流通过定子绕组,产生磁场。
2. 磁场与转子中的永磁体或者电磁铁相互作用,产生磁力。
3. 磁力使转子开始旋转。
4. 电流的方向会随着转子的旋转而不断改变,从而保持转子持续旋转。
5. 通过控制电流的方向和大小,可以调整行走马达的转速和转向。
四、应用领域行走马达广泛应用于各种挪移设备和机械装置中,包括但不限于以下领域:1. 工业机械:行走马达可用于工业机器人、自动化生产线等设备中,实现精确的定位和挪移。
2. 交通工具:行走马达可应用于电动汽车、电动自行车等交通工具中,提供动力和驱动力。
3. 农业机械:行走马达可用于农业机械设备,如拖拉机、收割机等,提供动力和驱动力。
4. 建造工程:行走马达可应用于挖掘机、推土机等工程机械中,实现土方作业和施工。
5. 家用电器:行走马达也可用于家用电器,如洗衣机、吸尘器等,实现转动和驱动功能。
五、总结行走马达是一种常见的电动机,其工作原理基于电磁感应和磁力作用。
通过控制电流的方向和大小,可以实现行走马达的转速和转向的调节。
行走马达广泛应用于各种挪移设备和机械装置中,包括工业机械、交通工具、农业机械、建造工程和家用电器等领域。
步进马达的详细讲解

步进电机的名称步进电机(stepping motor),步进电机(step motor),或者是脉冲电机(pulse motor),其它的如(stepper motor)等……有着各式各样的称呼方式,这些用日本话来表示的时候,就成为阶动电动机,还有,阶动就是一步一步阶段动作的意思,这各用另外一种语言来表示时,就是成为步进驱动的意思,总之,就是输入一个脉冲就会有一定的转角,分配转轴变位的电动机。
步进电机简介:步进电机是将电脉冲信号转变为角位移或线位移的开环控制组件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
单相步进电机有单路电脉冲驱动,输出功率一般很小,其用途为微小功率驱动。
多相步进电机有多相方波脉冲驱动,用途很广。
使用多相步进电机时,单路电脉冲信号可先通过脉冲分配器转换为多相脉冲信号,在经功率放大后分别送入步进电机各项绕组。
每输入一个脉冲到脉冲分配器,电机各相的通电状态就发生变化,转子会转过一定的角度(称为步距角)。
正常情况下,步进电机转过的总角度和输入的脉冲数成正比;连续输入一定频率的脉冲时,电机的转速与输入脉冲的频率保持严格的对应关系,不受电压波动和负载变化的影响。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
步进电机按旋转结构分两大类:1是圆型旋转电机如下图A 2直线型电机,结构就象一个圆型旋转电机被展开一样,如下图B一,步进电机的种类现在,在市场上所出现的步进电机有很多种类,依照性能及使用目的等有各自不同的区分使用。
举个例子,各自不同的区分使用有精密位置决定控制的混合型,或者是低价格想用简易控制系构成的PM型,由于电机的磁气构造分类,因此就性能上来说就会有影响,其它的有依步进电机的外观形状来分类,也有由驱动相数来分类,和驱动回路分类等。