A SOFTWARE-BASED HARDWARE FAULT TOLERANCE SCHEME FOR MULTICOMPUTERS
计算机专业英语教案Unit1[合集]
![计算机专业英语教案Unit1[合集]](https://img.taocdn.com/s3/m/327c07e88ad63186bceb19e8b8f67c1cfad6eeb7.png)
计算机专业英语教案Unit1[合集]第一篇:计算机专业英语教案Unit 1兰州外语职业学院教案专用纸专业:科目:教师:班级:年学年度第学期授课时数:授课时段:第周Unit ONEPC Overview CLASS TYPE:TEACHING OBJECTIVE 1.Master all the professional terms in this Unit.2.Understand the definition of PC3.Understand the main function Of Smartphone Tablet and Laptop4.Develop the students’ reading abilities.TEACHING APPROACH: 1.Method of Lecture 2.TBLT(Task Based Language Teaching)3.CLTA(Communicative Language Teaching Approach)TEACHING AIDS Chalk,Blackboard, Tape-recorder,Multi-media equipment.IMPORTANT POINTS: 1.Words and terms:2.What is the structure of PC? DIFFICULT POINTS: 1.Understand the main structure of PC TIME ALLOTMENT: 1).Warm up activities(2-3minutes)2).Homework checking& review(2minutes)3).Reading and translating(100minutes)4)Summary&Homework(5minutes)5).ReflectionsTEACHING PROCEDURE:I.LEAD IN(1).Which kinds of computers do you know?(2).Which parts of computer you know? What are their functions? II.NEW WORDS AND TERMS a)virtual terminal(虚拟终端), virtual memory(虚拟内存)b)processor(处理器),microprocessor(微处理器)c)computerized component(计算机化组件)d)browse the web (浏览网络), browser(浏览器)e)keyboard(键盘),mouse (鼠标)f)floppy disk(软盘), flash memory(优盘)g)monitor (显示器)h)MP3(MP3文件格式或MP3播放器)i)GPS(全球定位系统)III.TEACHING CONTENTS 1.Background of informationPPT(Omitted)nguage points(A)Sentence translating1.Virtually every facet of our lives has some computerized component.我们生活中的几乎每个方面都有一些计算机化的成份。
十个明确简答
十个明确简答1.What is a computer?A computer is a device that can store, retrieve, and process data.2.What is the internet?The internet is a global network of interconnected computers, allowing users to access, exchange and share data.3.What is a computer virus?A computer virus is a malicious program designed to spread itself by copying itself to other computers or exploiting computer vulnerabilities.4.What is hardware?Hardware refers to the physical components of a computer system, including the processor, memory, power supply, motherboards and other components.5.What is software?Software is a set of instructions for a computer that can be used to perform specific tasks.6.What is a database?A database is a collection of data or information that is organized and stored so that it can be easily accessed and manipulated.7.What is system software?System software is a set of programs that control the operation of a computer and manage its resources.8.What is an operating system?An operating system is a set of software that manages the resources of a computer system, such as its memory and processor, and allows applications and users to interact with the computer.9.What is a program?A program is a set of instructions that a computer can execute to carry out specific tasks.10.What is a compiler?A compiler is a program that can convert a program written in a programming language into instructions that can be read and executed by a computer.。
PA-chapter09-Testing the System
Pfleeger and Atlee, Software Engineering: Theory and Practice
Chapter 9 Objectives
• Function testing • Performance testing • Acceptance testing • Software reliability, availability, and maintainability • Installation testing • Test documentation • Testing safety-critical systems
Pfleeger and Atlee, Software Engineering: Theory and Practice
Chapter 9.6
9.1 Principles of System Testing
Techniques Used in System Testing
• Build or integration plan • Regression testing • Configuration management
Chapter 9.13
9.1 Principles of System Testing
Configuration Management
• Versions and releases • Production system vs. development system • Deltas, separate files and conditional compilation • Change control
Pfleeger and Atlee, Software Engineering: Theory and Practice
英语作文什么是电脑

英语作文什么是电脑Title: Understanding Computers: A Comprehensive Overview。
In the modern era, computers have become an integral part of our daily lives, revolutionizing the way we work, communicate, and entertain ourselves. But what exactly is a computer?At its core, a computer is a programmable machine that processes data to perform various tasks. It consists of hardware and software components working together seamlessly to execute instructions and deliver results.Let's delve deeper into each aspect:1. Hardware: This encompasses all the physical components of a computer. At the heart of every computer is the central processing unit (CPU), which serves as the brain, executing instructions and performing calculations. Other essential hardware components include memory (RAM),which temporarily stores data and instructions for quick access, storage devices such as hard drives or solid-state drives (SSDs) for long-term data retention, input devices like keyboards and mice for user interaction, and output devices such as monitors and printers to display information and produce tangible results.2. Software: While hardware provides the physical foundation, software refers to the programs, applications, and operating systems that enable users to interact with the computer. Operating systems like Windows, macOS, and Linux manage hardware resources and provide a user-friendly interface for running applications. Software applications range from productivity tools like word processors and spreadsheets to multimedia software, games, and web browsers. Each software program is comprised of codewritten in programming languages like C++, Java, or Python, which the computer's CPU interprets and executes to perform specific tasks.3. Functionality: Computers are incredibly versatile machines capable of performing a wide range of tasks. Theycan process numerical calculations, manipulate text and images, play multimedia content, connect to the internetfor communication and information retrieval, and much more. Whether it's crunching numbers for scientific research, editing photos and videos, or conducting online transactions, computers have become indispensable tools in virtually every field imaginable.4. Networking: In today's interconnected world, computers often operate within networks, allowing them to communicate and share resources with other computers. Local area networks (LANs) enable communication within a limited geographical area, such as a home, office, or school, while wide area networks (WANs) connect computers across larger distances, often spanning continents. The internet itself is a vast global network of interconnected computers, facilitating communication, collaboration, and access to a wealth of information and services.5. Evolution: Over the decades, computers have evolved significantly in terms of both hardware capabilities and software functionality. From room-sized mainframe computersof the mid-20th century to the compact and powerful personal computers (PCs) and mobile devices of today, advancements in technology have led to exponential increases in processing power, storage capacity, and connectivity. Meanwhile, software has become increasingly sophisticated, with artificial intelligence, machine learning, and automation driving further innovation and expansion of computer capabilities.In conclusion, a computer is much more than just a machine; it's a marvel of modern technology that empowers individuals and organizations to achieve remarkable feats. With its combination of hardware, software, functionality, networking, and evolution, the computer stands as a testament to human ingenuity and innovation, continually shaping the world we live in and opening up new possibilities for the future.。
gen5酶标仪英文说明书

Operator’s ManualMicroplate SpectrophotometerEon™© 2012, BioTek ® Instruments, Inc. PN 1021000 Rev C1 Page 1 of 1Eon Microplate Spectrophotometer (all models)Notification for Kinetic Assays Utilizing the Continuous Shake FeatureA Gen5 experiment that specifies the following parameters may not run successfully on the Eon:• Continuous Shake• Kinetic Interval greater than 15 minutesWhen the experiment is initiated, plate shaking will begin but shaking may stop prematurely with no error message.One suggested workaround is to shorten the kinetic interval. For example, if your desired experiment is 25 kinetic reads with 60 minute intervals, use 100 kinetic reads at 15 minute intervals.Another suggestion is to perform multiple Shake steps and then a Read step with the Discontinuous Kinetic Procedure feature enabled. For example, if your desired experiment looks like this:Do this (this example assumes the Read step takes one minute):Please contact BioTek’s Technical Assistance Center with any questions, tac@ .Eon™Microplate Spectrophotometer Operator's ManualOctober 2012© 2012Part Number 1021000Revision CBioTek Instruments, Inc.ii | PrefaceNoticesBioTek® Instruments, Inc.Highland Park, P.O. Box 998Winooski, Vermont 05404-0998 USAAll Rights Reserved© 2012, BioTek® Instruments, Incorporated. No part of this publication may bereproduced, transcribed, or transmitted in any form, or by any means electronic ormechanical, including photocopying and recording, for any purpose other than thepurchaser’s use without written permission of BioTek Instruments, Inc.TrademarksBioTek® is a registered trademark, and Eon™, Gen5™, and Take3™ and Take3 Trio™Micro-Volume Plate are trademarks of BioTek Instruments, Inc. BioCell™ is atrademark of BioTek Instruments and is patented under U.S. patent number 5,963,318.Microsoft®, Windows®, and Excel® are either registered trademarks or trademarks ofMicrosoft Corporation in the United States and/or other countries.All other trademarks are the property of their respective holders.Restrictions and LiabilitiesInformation in this document is subject to change and does not represent acommitment by BioTek Instruments, Inc. Changes made to the information in thisdocument will be incorporated in new editions of the publication. No responsibility isassumed by BioTek for the use or reliability of software or equipment that is notsupplied by BioTek or its affiliated dealers.BioTek Instruments, Inc.Contents | iii Eon Operator’s ManualContentsNotices ...........................................................................................................ii Contact Information ........................................................................................ v Revision History .............................................................................................. v i Document Conventions ................................................................................... vii Intended Use Statement ................................................................................. vii Quality Control ............................................................................................. viii Warranty and Product Registration .................................................................. viii Repackaging and Shipping ............................................................................. viii Warnings ....................................................................................................... i x Hazards ......................................................................................................... i x Precautions .................................................................................................... x CE Mark ......................................................................................................... x i Electromagnetic Interference and Susceptibility .................................................. xii User Safety .................................................................................................. xiii Safety Symbols .. (xiv)Chapter 1: Introduction ................................................................................... 1 Product Description ......................................................................................... 2 Package Contents ........................................................................................... 3 Optional Accessories ........................................................................................ 3 Product Support and Service . (4)Chapter 2: Installation ..................................................................................... 5 Product Registration ........................................................................................ 6 1: Unpack and Inspect the Instrument ............................................................... 6 2: Remove the Microplate Carrier Shipping Bracket .............................................. 7 3: Select an Appropriate Location ...................................................................... 8 4: Connect the Power Supply ............................................................................ 9 5: Connect the Host Computer ......................................................................... 10 6: Install Gen5 on the Host Computer ............................................................... 10 7: Turn on the Reader .................................................................................... 10 8: Establish Communication ............................................................................ 12 9: Run a System Test ..................................................................................... 13 Operational/Performance Qualification .............................................................. 14 Getting Started with Gen5 ............................................................................... 14 Repackaging and Shipping (15)Chapter 3: Instrument Qualification ............................................................... 19 Overview ...................................................................................................... 20 IQ/OQ/PQ ..................................................................................................... 20 Recommended Qualification Schedule ............................................................... 21 System Self-Test ........................................................................................... 22 Absorbance Plate Test .................................................................................... 26 Absorbance Liquid Tests . (31)iv | Preface BioTek Instruments, Inc.Chapter 4: Preventive Maintenance ................................................................ 41 Overview ...................................................................................................... 42 Required Materials ......................................................................................... 42 Warnings and Precautions ............................................................................... 42 Routine Cleaning Procedure ............................................................................. 43 Decontamination .. (44)Appendix A: Specifications ............................................................................. 45 General Specifications .................................................................................... 46 Read Specifications . (47)Appendix B: Error Codes ................................................................................ 49 Overview ...................................................................................................... 50 General Errors ............................................................................................... 51 Fatal Errors (58)A ppendix C: Instrument Dimensions (59)Index (63)Contact Information | vEon Operator’s Manual Contact Information See also Product Support & Service on page 4.BioTek ® Instruments, Inc.Highland Park, P.O. Box 998Winooski, Vermont 05404-0998 USACustomer Service and SalesInternet: Phone:888-451-5171 (toll free in the U.S.)802-655-4740 (outside the U.S.) Fax:802-655-7941 E-Mail: customercare@Service/TACPhone:800-242-4685 (toll free in the U.S.) 802-655-4740 (outside the U.S.)Fax: 802-654-0638E-Mail: tac@European Coordination Center/Authorized European RepresentativeBioTek ® Instruments GmbHKocherwaldstrasse 34D-74177 Bad FriedrichshallGermanyInternet: www.biotek.dePhone:+49 (0) 7136 9680 Fax:+49 (0) 7136 968 111 E-Mail:info@biotek.devi | Preface BioTek Instruments, Inc. Revision History RevDate Changes A 8/2011 Initial release to ProductionB 6/2012 Preface: Updated the Intended Use Statement. Added ‘Service’ and ‘Accessories’ hazard warnings. Added ‘Spare Parts’ precaution. Updated the CE Mark information to include EN 61010-2-081 and EN 61010-2-101. Added ‘(if labeled for this use)’ to Directive 98/79/EC: In Vitro Diagnostics.Ch. 3 Instrument Qualification: Simplified the Absorbance Plate Test and liquid tests.C 10/2012 Preface: Updated the CE Mark information to include EN 61010-2-010. Updated the Intended Use Statement to include the “optional cuvette port”.Document Conventions | vii Document ConventionsSee also Safety Symbols on page xiv.This icon calls attention to important safety notes.Warning! A Warning indicates the potential for bodily harm and tells you how to avoid the problem.Caution A Caution indicates potential damage to the instrument and tells you how to avoid the problem.Note: Bold text is primarily used for emphasis.This icon calls attention to important information.Intended Use StatementThe Eon is a single-channel, automated, benchtop, general-purpose microplatespectrophotometer that performs optical density measurements of samples in a microplate format and optional cuvette port. The performance characteristics of the data reduction software have not been established with any laboratory diagnostic assay. The user must evaluate this instrument and (if used) PC-based software in conjunction with their specific assay(s). This evaluation must include the confirmation that performance characteristics for the specific assay(s) are met.If the instrument has an “IVD” label it may be used for clinical and non-clinical purposes, including research & development. If there is no such label the instrument may only be used for research & development or other non-clinical purposes.viii | PrefaceQuality ControlIt is considered good laboratory practice to run laboratory samples according toinstructions and specific recommendations included in the package insert for the test to be conducted. Failure to conduct Quality Control checks could result in erroneous test data. Warranty and Product RegistrationTake a moment to review the warranty information that shipped with your product.Please also register your product with BioTek to ensure that you receive importantinformation and updates about the product(s) you have purchased. You can register online through the Customer Resource Center (CRC) at or by calling (888) 451-5171 or (802) 655-4740.Repackaging and ShippingIf you need to ship the instrument to BioTek for service or repair,contact BioTek for a Return Materials Authorization (RMA)number, and be sure to use the original packing materials. Otherforms of commercially available packaging are not recommendedand can void the warranty. If the original packing materials havebeen damaged or lost, contact BioTek for replacement packing.Warnings | ixWarningsOperate the instrument on a level, stable surface away from excessive humidity. Bright sunlight or strong incandescent light can reduce the linear performance range of the instrument.Measurement values may be affected by extraneous particles (such as dust) in the microplate wells or cuvettes. A clean work area is necessary to ensure accurate readings.When operated in a safe environment according to the instructions in thisdocument, there are no known hazards associated with the instrument. However, the operator should be aware of certain situations that could result in serious injury; these may vary depending on the instrument model. See Hazards and Precautions .HazardsThe following hazard warnings are provided to help avoid injury:Warning! Internal Voltage. Always turn off the power switch and unplug the power supply before cleaning the outer surface of the instrument.Warning! Power Rating. The instrument’s power supply must be connected toa power receptacle that provides voltage and current within the specified rating for the system. Use of an incompatible power receptacle may produce electrical shock and fire hazards.Warning! Electrical Grounding. Never use a plug adapter to connect primarypower to the external power supply. Use of an adapter disconnects the utilityground, creating a severe shock hazard. Always connect the power supply directly to an appropriate receptacle with a functional ground.Warning! Service. Only qualified technical personnel should perform service procedures on internal components.Warning! Accessories. Only accessories which meet the manufacturer’s specifications shall be used with the instrument.Warning! Liquids. Avoid spilling liquids on the reader; fluid seepage intointernal components creates a potential for shock hazard or instrument damage. If a spill occurs while a program is running, abort the program and turn off the instrument. Wipe up all spills immediately. Do not operate the instrument if internal components have been exposed to fluid.x | PrefaceWarning! Unspecified Use.Failure to operate this equipment according to theguidelines and safeguards specified in this manual could result in a hazardouscondition.Warning! Software Quality Control. The operator must follow themanufacturer’s assay package insert when modifying software parameters andestablishing reading methods. Failure to conduct quality control checks couldresult in erroneous test data.Warning! Reader Data Reduction Protocol. No limits are applied to the rawabsorbance data. All information exported via computer control must bethoroughly analyzed by the operator.Warning! Potential Biohazards.Some assays or specimens may pose abiohazard. Adequate safety precautions should be taken as outlined in the assay’spackage insert. Always wear safety glasses and appropriate protective equipment,such as chemically resistant rubber gloves and apron.PrecautionsThe following precautions are provided to help avoid damage to the instrument:Caution: Service.The instrument should be serviced by BioTek-authorizedservice personnel. Only qualified technical personnel should perform serviceprocedures on internal components.Caution: Spare Parts. Only approved spare parts should be used formaintenance. The use of unapproved spare parts and accessories may result in aloss of warranty and potentially impair instrument performance or cause damageto the instrument.Caution: Environmental Conditions. Do not expose the instrument totemperature extremes. For proper operation, ambient temperatures shouldremain with the range listed in the Specifications section. Performance may beadversely affected if temperatures fluctuate above or below this range. Storagetemperature limits are broader.Caution: Sodium Hypochlorite.Do not expose any part of the instrument tothe recommended diluted sodium hypochlorite solution (bleach) for more than 20minutes. Prolonged contact may damage the instrument surfaces. Be certain torinse and thoroughly wipe all surfaces.Caution: Power Supply.Only use the power supply shipped with the instru-ment. Operate this power supply within the range of line voltages listed on it.Caution: Disposal. This instrument contains printed circuit boards and wiringwith lead solder. Dispose of the instrument according to Directive 2002/96/EC,“on waste electrical and electronic equipment (WEEE),” or local ordinances.CE Mark | xi Caution: Warranty. Failure to follow preventive maintenance protocols mayvoid the warranty.Caution: Shipping Hardware.All shipping hardware (e.g., carrier shippingbracket) must be removed before operating the instrument and reinstalled beforerepackaging the instrument for shipment.Caution: Electromagnetic Environment. Per IEC 61326-2-6 it is the user’sresponsibility to ensure that a compatible electromagnetic environment for thisinstrument is provided and maintained in order that the device will perform asintended.Caution: Electromagnetic Compatibility. Do not use this device in closeproximity to sources of strong electromagnetic radiation (e.g., unshieldedintentional RF sources), because these may interfere with the proper operation. CE MarkBased on the testing described below and information containedherein, this instrument bears the CE mark.Refer to the Declaration of Conformity for more specific information. Directive 2004/108/EC: Electromagnetic Compatibility Emissions—Class AThe system has been type-tested by an independent, accredited testing laboratory and found to meet the requirements of EN 61326-1: Class A for Radiated Emissions and Line Conducted Emissions. Verification of compliance was conducted to thelimits and methods of EN 55011 – (CISPR) Class A. In a domestic environment itmay cause radio interference, in which case you may need to mitigate theinterference.ImmunityThe system has been type-tested by an independent, accredited testing laboratory and found to meet the requirements of EN 61326-1 and EN 61326-2-6 forImmunity. Verification of compliance was conducted to the limits and methods of the following:EN 61000-4-2, Electrostatic DischargeEN 61000-4-3, Radiated EM FieldsEN 61000-4-4, Electrical Fast Transient/BurstEN 61000-4-5, Surge Immunityxii | PrefaceEN 61000-4-6, Conducted Disturbances from RFIEN 61000-4-11, Voltage Dips, Short Interruptions and Variations Directive 2006/95/EC Low Voltage (Safety)The system has been type-tested by an independent testing laboratory and was foundto meet the requirements of this Directive. Verification of compliance was conducted to the limits and methods of the following:EN 61010-1, “Safety requirement for electrical equipment for measurement, control and laboratory use. Part 1, General requirements.”EN 61010-2-081, “Particular requirements for automatic and semi-automatic laboratory equipment for analysis and other purposes.”EN 61010-2-010, “Particular requirements for laboratory equipment for the heating ofmaterials.”Directive 2002/96/EC: Waste Electrical and Electronic Equipment Disposal Notice: This instrument contains printed circuit boards and wiring with leadsolder. Dispose of the instrument according to Directive 2002/96/EC, “on wasteelectrical and electronic equipment (WEEE)” or local ordinances.Directive 98/79/EC: In Vitro Diagnostics (if labeled for this use) •Product registration with competent authorities.•Traceability to the U.S. National Institute of Standards and Technology (NIST)•EN 61010-2-101, “Particular requirements for in vitro diagnostic (IVD) medical equipment.”Electromagnetic Interference and Susceptibility USA FCC CLASS ARADIO AND TELEVISION INTERFERENCENOTE: This equipment has been tested and found to comply with the limits for a ClassA digital device, pursuant to Part 15 of the FCC Rules. These limits are designed toprovide reasonable protection against harmful interference when the equipment isoperated in a commercial environment. This equipment generates, uses, and canradiate radio frequency energy and, if not installed and used in accordance with theinstruction manual, may cause harmful interference to radio communications.Operation of this equipment in a residential area is likely to cause harmful interference, in which case the user will be required to correct the interference at their own expense.User Safety | xiii In order to maintain compliance with FCC regulations shielded cables must be usedwith this equipment. Operation with non-approved equipment or unshielded cables is likely to result in interference to radio and television reception.Canadian Department of Communications Class AThis digital apparatus does not exceed Class A limits for radio emissions from digitalapparatus set out in the Radio Interference Regulations of the Canadian Department of Communications.Le present appareil numerique n'émet pas de bruits radioélectriques depassant leslimites applicables aux appareils numérique de la Class A prescrites dans le Réglement sur le brouillage radioélectrique édicté par le ministère des Communications duCanada.User SafetyThis device has been type-tested by an independent laboratory and found to meet therequirements of the following:•Underwriters Laboratories UL 61010-1, “Safety requirements for electrical equipment for measurement, control and laboratory use; Part 1: Generalrequirements.”•Canadian Standards Association CAN/CSA C22.2 No. 61010-1, “Safety requirements for electrical equipment for measurement, control and laboratoryuse; Part 1: General requirements.”•EN 61010 Standards, see CE Mark starting on page xi.xiv | PrefaceSafety SymbolsSome of these symbols appear on the instrument or accessories:Safety Symbols | xvIn vitro diagnostic medical device Dispositif médical dediagnostic in vitro Medizinisches In-Vitro-DiagnostikumDispositivo médico de diagnóstico in vitroDispositivo medico diagnostico in vitroSeparate collection for electrical and electronic equipmentLes équipements électriques etélectroniques font l’objet d’une collecte sélectiveGetrennte Sammlung von Elektro- und ElektronikgerätenRecogida selectiva de aparatos eléctricos y electrónicosRaccolta separata delle apparecchiature elettriche ed elettronicheConsult instructions for useConsulter la notice d’emploi Gebrauchsanweisung beachten Consultar las instrucciones de usoConsultare le istruzioni per usoLaser radiation: Do not stare into beam Rayonnement laser: Ne pas regarder dans le faisceauLaserstrahlung: Nicht in den strahl blicken Radiación de láser: No mire fijamente al rayoRadiazione di laser: Non stare nel fascioxvi | PrefaceChapter 1IntroductionThis chapter introduces the Eon and describes its hardware andsoftware features, and technical specifications. Instructions on how to contact BioTek for product support and service are included onpage 4.Product Description (2)Package Contents (3)Optional Accessories (3)Product Support and Service (4)Technical Assistance Center (TAC) (4)2 | Chapter 1: IntroductionProduct DescriptionThe Eon Microplate Spectrophotometer offers tunable wavelength selection and wave-length scanning without the need for interference filters. The single-channel reader iscompletely computer controlled via BioTek’s intuitive and user-friendly Gen5 software.Key features include:• A variety of read modes including endpoint, kinetic, multiwavelength, and spectral scanning.• A monochromator for continuous wavelength selection from 200 to 999 nm in 1-nm increments, and a xenon flash lamp for both UV and visible light absorbancemeasurements.•Superior optical specifications, with an extended dynamic range of up to 4.000 OD.•Ability to read standard microplates from 6- to 384-wells, Terasaki plates (with adapter), BioTek’s patented BioCell quartz vessel for 1-cm measurements, and theBioTek Take3 and Take3 Trio Micro-Volume Plates. Use of microplates other thanthose listed here can result in positioning errors during program execution.•Normal and Sweep reading speeds.•Temperature control from 4°C over ambient to 65°C that ensures superior temperature uniformity necessary for kinetic assays.•Programmable plate shaking that allows for control of shaking intensity and timing.•Optional cuvette port available.•Applications that include ELISA, kinetic enzyme assays, nucleic acid quantitation, A260/A280 ratios, protein analysis and much more.•Robot-accessible carrier. Compatible with BioTek’s optional BioStack Microplate Stacker.See Appendix A for performance and technical specifications.BioTek Instruments, Inc.Package Contents | 3Eon Operator’s Manual Package Contents Part numbers are subject to change. Please contact BioTek Customer Care with any questions. Item Part # Eon Operator’s Manual 1021000 Power supply76077 Power cordvaries according to country of use USB cable, Virtual COM Driver Software75108, 7090204 RS-232 serial cable 75034Screwdriver 01188Optional AccessoriesAccessory availability and part numbers are subject to change. Please contact BioTek Customer Care if you have any questions or visit and use the Accessories search tool. ItemPart # 7-filter Absorbance Test Plate for absorbance measurement testing7260522 Eon Product Qualification (IQ-OQ-PQ) package1020512 BioCell quartz vessel for 1-cm wavelength fixed pathlength absorbance measurements7272051 BioCell adapter plate for containing up to eight BioCells7270512 Terasaki plate adapter for 60-, 72-, and 96-well Terasaki plates7220531Absorbance Liquid Test Solutions:BioTek Wetting Agent Solution (PN 7773002)BioTek QC Check Solution No. 1 (25 mL) orBioTek QC Check Solution No. 1 (125 mL)7773002 7120779 7120782 Take3 Micro-Volume PlateTAKE3 Take3 Trio Micro-Volume PlateTAKE3TRIO Cuvette holder (for EONc) 1020508 The Eon is compatible with the BioStack Microplate Stacker. The BioStack rapidly and systematically transfers a stack of microplates to and from the reader’s microplate carrier. Contact BioTek or visit our website to learn more.4 | Chapter 1: IntroductionProduct Support and ServiceTechnical Assistance Center (TAC)If your instrument or software fails to function properly, if you have questions abouthow to use or maintain our products, or if you need to send an instrument to BioTekfor service or repair, please contact our Technical Assistance Center (TAC).TAC is open from 8:30 AM to 5:30 PM (EST), Monday through Friday, excludingstandard U.S. holidays.Phone: 800-242-4685 or Fax: (802) 654-0638 E-Mail: tac@802-655-4740 Web: Please be prepared to provide the following information:•Your name and company informationm along with a daytime phone or fax number, and/or an email address•The product name, model, and serial number•The basecode software part number and version (available via Gen5 by selecting System > Reader Control > Information)•Gen5 software version information (Help > About Gen5)•For troubleshooting assistance or instruments needing repair, the specific steps that produce your problem, and any error codes displayed (see alsoAppendix B, Error Codes).If you need to return an instrument to BioTek for service or repair, please contact theTAC for a Return Materials Authorization (RMA) number and the shipping address.Repackage the instrument according to the instructions at the end of Chapter 2,Installation.BioTek Instruments, Inc.。
硬件工程师 英语词汇(新手必备,挺全的)

英文电子专业词汇(新手必备)1 backplane 背板2 Band gap voltage reference 带隙电压参考3 bench top supply 工作台电源4 Block Diagram 方块图5 Bode Plot 波特图6 Bootstrap 自举7 Bottom FET Bottom FET8 bucket capacitor 桶形电容9 chassis 机架10 Combi-sense Combi-sense11 constant current source 恒流源12 Core Saturation 铁芯饱和13 crossover frequency 交叉频率14 current ripple 纹波电流15 Cycle by Cycle 逐周期16 cycle skipping 周期跳步17 Dead Time 死区时间18 DIE Temperature 核心温度19 Disable 非使能,无效,禁用,关断20 dominant pole 主极点21 Enable 使能,有效,启用22 ESD Rating ESD额定值23 Evaluation Board 评估板24 Exceeding the specifications below may result in permanent damage to the device, or device malfunction. Operation outside of the parameters specified in the Electrical Characteristics section is not implied. 超过下面的规格使用可能引起永久的设备损害或设备故障。
建议不要工作在电特性表规定的参数范围以外。
25 Failing edge 下降沿26 figure of merit 品质因数27 float charge voltage 浮充电压28 flyback power stage 反驰式功率级29 forward voltage drop 前向压降30 free-running 自由运行31 Freewheel diode 续流二极管32 Full load 满负载33 gate drive 栅极驱动34 gate drive stage 栅极驱动级35 gerber plot Gerber 图36 ground plane 接地层37 Henry 电感单位:亨利38 Human Body Model 人体模式39 Hysteresis 滞回40 inrush current 涌入电流41 Inverting 反相42 jittery 抖动43 Junction 结点44 Kelvin connection 开尔文连接45 Lead Frame 引脚框架46 Lead Free 无铅47 level-shift 电平移动48 Line regulation 电源调整率49 load regulation 负载调整率50 Lot Number 批号51 Low Dropout 低压差52 Miller 密勒53 node 节点54 Non-Inverting 非反相55 novel 新颖的56 off state 关断状态57 Operating supply voltage 电源工作电压58 out drive stage 输出驱动级59 Out of Phase 异相60 Part Number 产品型号61 pass transistor pass transistor62 P-channel MOSFET P沟道MOSFET63 Phase margin 相位裕度64 Phase Node 开关节点65 portable electronics 便携式电子设备66 power down 掉电67 Power Good 电源正常68 Power Groud 功率地69 Power Save Mode 节电模式70 Power up 上电71 pull down 下拉72 pull up 上拉73 Pulse by Pulse 逐脉冲(Pulse by Pulse)74 push pull converter 推挽转换器75 ramp down 斜降76 ramp up 斜升77 redundant diode 冗余二极管78 resistive divider 电阻分压器79 ringing 振铃80 ripple current 纹波电流81 rising edge 上升沿82 sense resistor 检测电阻83 Sequenced Power Supplys 序列电源84 shoot-through 直通,同时导通85 stray inductances. 杂散电感86 sub-circuit 子电路87 substrate 基板88 Telecom 电信89 Thermal Information 热性能信息90 thermal slug 散热片91 Threshold 阈值92 timing resistor 振荡电阻93 Top FET Top FET94 Trace 线路,走线,引线95 Transfer function 传递函数96 Trip Point 跳变点97 turns ratio 匝数比,=Np / Ns。
CISSP Study Notes from CISSP Prep Guide

CISSP Study Notes from CISSP Prep GuideThese notes were prepared from the The CISSP Prep Guide: Mastering the Ten Domains of Computer Security by Ronald L. Krutz, Russell Dean Vines, Edward M. Stroz and are not intended to be a replacement to the book.In addition to the CISSP Prep Guide I used the following resources to prepare for the exam:⏹The Information Security Management Handbook, Fourth Edition by Micki Krause and Harold F.Tipton⏹The revised Michael Overly notes⏹The Boson Questions #2 and #3⏹Lots of misc. websites⏹And of course Good Luck!JWG, CISSPCISSP STUDY NOTES FROM CISSP PREP GUIDE (1)DOMAIN 1 – SECURITY MANAGEMENT PRACTICES (2)DOMAIN 2 – ACCESS CONTROL SYSTEMS (7)DOMAIN 3 – TELECOM AND NETWORK SECURITY (13)DOMAIN 4 – CRYPTOGRAPHY (34)DOMAIN 5 – SECURITY ARCHITECTURE AND MODELS (46)DOMAIN 6 – OPERATIONS SECURITY (56)DOMAIN 7 – APPLICATIONS AND SYSTEM DEVELOPMENT (63)DOMAIN 8 – BUSINESS CONTINUITY AND DISASTER RECOVERY PLANNING (70)DOMAIN 9 – LAW, INVESTIGATION AND ETHICS (78)DOMAIN 10 – PHYSICAL SECURITY (87)Domain 1 – Security Management PracticesThe Big Three - C. I. A.⏹Confidentiality – Prevent disclosure of data⏹Integrity – Prevent modification of data⏹Availability – Ensure reliable timely access to dataOther Important Concepts⏹Identification – Means in which user claims Identity⏹Authentication – Establishes the users Identity⏹Accountability – Systems ability to determine actions of users⏹Authorization – rights and permissions granted to an individual⏹Privacy – Level of confidentiality that a user is givenObjective of Security is to reduce effects of threats and vulnerabilities to a tolerable level.Risk AnalysisAssess the following:⏹Impact of the threat⏹Risk of the threat occurring (likelihood)Controls reduce both the impact of the threat and the likelihood of the threat, important in cost benefit of controls.Data Classification⏹Data classification has high level enterprise wide benefit⏹Demonstrates organizations commitment to security⏹Helps identify sensitive and vital information⏹Supports C.I.A.⏹May be required for legal regulatory reasonsData owners are responsible for defining the sensitivity level of the data.Government Classification Terms:⏹Unclassified – Neither sensitive nor classified, public release is acceptable⏹Sensitive But Unclassified (SBU) – Minor secret, no serious damage if disclosed⏹Confidential – disclosure could cause damage to National Security⏹Secret - disclosure could cause serious damage to National Security⏹Top Secret – Highest Level - disclosure could cause exponentially grave damage to National Security In addition must have a Need to Know –just because you have ―secret‖ clearance does not mean all―secret‖ data just data with a need to know.Additional Public Classification Terms⏹Public – similar to unclassified, should not be disclosed but is not a problem if it is⏹Sensitive – data protected from loss of Confidentiality and integrity⏹Private – data that is personal in nature and for company use only⏹Confidential – very sensitive for internal use only - could seriously negatively impact the company Classification Criteria⏹Value - number one criteria, if it is valuable it should be protected⏹Age – value of data lowers over time, automatic de-classification⏹Useful Life – If the information is made obsolete it can often be de-classified⏹Personal Association – If the data contains personal information it should remain classifiedDistribution may be required in the event of the following:⏹Court Order – may be required by court order⏹Government Contracts – government contractors may need to disclose classified information ⏹Senior Level Approval – senior executives may approve releaseInformation Classification RolesOwner⏹May be executive or manager⏹Owner has final corporate responsibility of the data protection⏹Makes determination of classification level⏹Reviews classification level regularly for appropriateness⏹Delegates responsibility of data protection to the CustodianCustodian⏹Generally IT systems personnel⏹Running regular backups and testing recovery⏹Performs restoration when required⏹Maintains records in accordance with the classification policyUser⏹Anyone the routinely uses the data⏹Must follow operating procedures⏹Must take due care to protect⏹Must use computing resources of the company for company purposes onlyPolicies Standards, Guidelines and Procedures⏹Policies are the highest level of documentation⏹Standards, Guidelines and Procedures derived from policies⏹Should be created first, but are no more important than the restSenior Management Statement – general high-level statement⏹Acknowledgment of importance of computing resources⏹Statement of Support for information security⏹Commitment to authorize lower level Standards, Guidelines and ProceduresRegulatory Policies– company is required to implement due to legal or regulatory requirements ⏹Usually very detailed and specific to the industry of the organization⏹Two main purposes⏹To ensure the company is following industry standard procedures⏹To give the company confidence they are following industry standard procedures Advisory Polices– not mandated but strongly suggested.⏹Company wants employees to consider these mandatory.⏹Advisory Policies can have exclusions for certain employees or job functionsInformative Policies⏹Exist simply to inform the reader⏹No implied or specified requirementsStandards, Guidelines and Procedures⏹Contain actual detail of the policy⏹How the policies should be implemented⏹Should be kept separate from one another⏹Different Audiences⏹Security Controls are different for each policy type⏹Updating the policy is more manageableStandards - Specify use of technology in a uniform way, compulsoryGuidelines– similar to standards but not compulsory, more flexibleProcedures–Detailed steps, required, sometimes called ―practices‖, lowest levelBaselines – baselines are similar to standards, standards can be developed after the baseline is established Roles and Responsibilities⏹Senior Management – Has ultimate responsibility for security⏹Infosec Officer – Has the functional responsibility for security⏹Owner – Determines the data classification⏹Custodian - Preserves C.I.A.⏹User – Performs in accordance with stated policy⏹Auditor – Examines SecurityRisk ManagementMitigate (reduce) risk to a level acceptable to the organization.Identification of Risk⏹Actual threat⏹Possible consequences⏹Probable frequency⏹Likely hood of eventRisk Analysis⏹Identification of risks⏹Benefit - cost justification of counter measuresRisk Analysis Terms⏹Asset – Resource, product, data⏹Threat – Action with a negative impact⏹Vulnerability – Absence of control⏹Safeguard – Control or countermeasure⏹Exposure Factor% of asset loss caused by threat⏹Single Loss Expectancy (SLE) – Expected financial loss for single eventSLE = Asset Value x Exposure Factor⏹Annualized Rate of Occurrence (ARO)– represents estimated frequency in which threat will occurwithin one year⏹Annualized Loss Expectancy (ALE) – Annually expected financial lossALE = SLE x ARORisk Analysis⏹Risk analysis is more comprehensive than a Business Impact Analysis⏹Quantitative – assigns objective numerical values (dollars)⏹Qualitative – more intangible values (data)⏹Quantitative is a major project that requires a detailed process planPreliminary Security Examination (PSE)⏹Often conducted prior to the quantitative analysis.⏹PSE helps gather elements that will be needed for actual RARisk Analysis Steps1)Estimate of potential loss2)Analyze potential threats3)Define the Annualized Loss Expectancy (ALE)Categories of Threats⏹Data Classification – malicious code or logic⏹Information Warfare – technically oriented terrorism⏹Personnel – Unauthorized system access⏹Application / Operational – ineffective security results in data entry errors ⏹Criminal – Physical destruction, or vandalism⏹Environmental – utility outage, natural disaster⏹Computer Infrastructure – Hardware failure, program errors⏹Delayed Processing – reduced productivity, delayed collections processing Annualized Loss Expectancy (ALE)⏹Risk analysis should contain the following:⏹Valuation of Critical Assets⏹Detailed listing of significant threats⏹Each threats likelihood⏹Loss potential by threat⏹Recommended remedial safeguardsRemedies⏹Risk Reduction - implementation of controls to alter risk position⏹Risk Transference– get insurance, transfer cost of a loss to insurance⏹Risk Acceptance –Accept the risk, absorb lossQualitative Scenario Procedure⏹Scenario Oriented⏹List the threat and the frequency⏹Create exposure rating scale for each scenario⏹Scenario written that address each major threat⏹Scenario reviewed by business users for reality check⏹Risk Analysis team evaluates and recommends safeguards⏹Work through each finalized scenario⏹Submit findings to managementValue Assessment⏹Asset valuation necessary to perform cost/benefit analysis⏹Necessary for insurance⏹Supports safeguard choicesSafeguard Selection⏹Perform cost/benefit analysis⏹Costs of safeguards need to be considered including⏹Purchase, development and licensing costs⏹Installation costs⏹Disruption to production⏹Normal operating costsCost Benefit AnalysisALE (PreControl) – ALE (PostControl) = Annualized value of the controlLevel of manual operations⏹The amount of manual intervention required to operate the safeguard⏹Should not be too difficult to operateAuditability and AccountabilitySafeguard must allow for auditability and accountabilityRecovery Ability⏹During and after the reset condition⏹No asset destruction during activation or reset⏹No covert channel access to or through the control during reset⏹No security loss after activation or reset⏹Defaults to a state that does not allow access until control are fully operational Security Awareness TrainingBenefits of Awareness⏹Measurable reduction in unauthorized access attempts⏹Increase effectiveness of control⏹Help to avoid fraud and abusePeriodic awareness sessions for new employees and refresh otherMethods of awareness improvement⏹Live interactive presentations⏹CBTs⏹Publishing of posters and newsletters⏹Incentives and awards⏹Reminders, login bannersTraining & Education⏹Security training for Operators⏹Technical training⏹Infosec training⏹Manager trainingDomain 2 – Access Control SystemsC - ConfidentialityI - IntegrityA - AvailabilityConfidentiality⏹Not disclosed to unauthorized personIntegrity⏹Prevention of modification by unauthorized users⏹Prevention of unauthorized changes by otherwise authorized users⏹Internal and External Consistency⏹Internal Consistency within the system (i.e. within a database the sum of subtotals is equal to thesum of all units)⏹ External Consistency – database with the real world (i.e. database total is equal to the actualinventory in the warehouse)Availability⏹Timely accessThree things to consider⏹Threats – potential to cause harm⏹Vulnerabilities – weakness that can be exploited⏹Risk – potential for harmControls⏹Preventative – prevent harmful occurrence⏹Detective – detect after harmful occurrence⏹Corrective – restore after harmful occurrenceControls can be:⏹Administrative – polices and procedures⏹Logical or Technical - restricted access⏹Physical – locked doorsThree types of access rules:1.Mandatory access control (MAC):Authorization of subject‘s access to an object depends on labels(sensitivity levels), which indicate subject‘s clearance, and the classification or sensitivity of the object ▪Every Object is assigned a sensitivity level/label and only users authorized up to that particular level can access the object▪Access depends on rules and not by the identity of the subjects or objects alone▪Only administrator (not owners) may change category of a resource — Orange book B-level ▪Output is labeled as to sensitivity level▪Unlike permission bits or ACLs, labels cannot ordinarily be changed▪Can‘t copy a labeled file into another file with a different label▪Rule based AC2.Discretionary Access Control (DAC): Subject has authority, within certain limits, to specify whatobjects can be accessible (e.g., use of ACL)▪User-directed means a user has discretion▪Identity-based means discretionary access control is based on the subjects identity▪Very common in commercial context because of flexibility▪Orange book C level▪Relies on object owner to control access▪Identity Based AC3.Non-Discretionary Access Control: Central authority determines what subjects can have access tocertain objects based on organization‘s security policy (good for high turnover)▪May be based on individual‘s role in the organization (Role-Based) or the subject‘s responsibilities or duties (task-based)Lattice based –provides least access privileges of the access pair⏹Greatest lower bound⏹Lowest upper boundIdentification and AuthenticationIdentification establishes accountabilityThree Factor Authentication⏹Something you know (password)⏹Something you have (token)⏹Something you are (biometrics)Sometimes - something you doPasswords⏹Static – same each time⏹Dynamic – changes each time you logonTokens – SmartcardsStatic Password (like software with pin)⏹Owner Authenticates to the token⏹Token authenticates to the systemSynchronous Dynamic Password⏹Token – generates passcode value⏹Pin – user knows⏹Token and Pin entered into PC⏹Must fit in valid time windowAsynchronous⏹Similar to synchronous, new password is generated asynchronously, No time windowChallenge Response⏹System generates challenge string⏹User enters into token⏹Token generates response entered into workstation⏹Mechanism in the workstation determines authenticationBiometrics– something you are⏹Identify – one to many⏹Authenticate – one to oneFalse Rejection Rate (FRR)– Type I errorFalse Acceptance Rate (FAR)– Type II errorCrossover Error Rate– (CER) – CER = % when FRR = FARBiometric Issues⏹Enrollment Time – Acceptable rate is 2 minutes per person⏹Throughput Time – acceptable rate is 10 people per minuteAcceptability Issues – privacy, physical, psychologicalTypes of Biometrics⏹Fingerprints: Are made up of ridge endings and bifurcations exhibited by the friction ridges and otherdetailed characteristics that are called minutiae.⏹Retina Scans: Scans the blood-vessel pattern of the retina on the backside of the eyeball.⏹Iris Scans: Scan the colored portion of the eye that surrounds the pupil.⏹Facial Scans: Takes attributes and characteristics like bone structures, nose ridges, eye widths,forehead sizes and chin shapes into account.⏹Palm Scans: The palm has creases, ridges and grooves throughout it that are unique to a specificperson.⏹Hand Geometry:The shape of a person‘s hand (the length and width of the hand and fingers)measures hand geometry.⏹Voice Print:Distinguishing differences in people‘s speech sounds and patterns.⏹Signature Dynamics: Electrical signals of speed and time that can be captured when a person writes asignature.⏹Keyboard Dynamics: Captures the electrical signals when a person types a certain phrase.⏹Hand Topology:Looks at the size and width of an individual‘s hand and fingers.Single Sign OnKerberos⏹Symmetric key encryption⏹KDC – Kerberos-trusted Key Distribution Center⏹TGS – Ticket Granting Service⏹AS – Authentication ServerKerberos1.KDC knows secret keys of Client and Server2.KDC exchanges info with the Client and the Server using symmetric keysing TGS grants temporary symmetric key4.Client and Server communicate using the temporary session keyInitial ExchangeClient sends Hash Password to the TGS Server, TGS verifies with the Auth. ServerTGS Server responds with:1) Key for Client and TGS server encrypted with Client Key [K(c,tgs)]Kc2) Ticket Granting Ticket (TGT) = [K(c, tgs), c,a,v]K(tgs)Request for ServiceClient sends request for service to TGS with1) TGT = [K(c, tgs), c,a,v]K(tgs)2) Authenticator K(c, tgs)TGS Issues Ticket for ServiceTGS sends Client back ticket for server and authenticator for server1) Ticket T(c,s) = [s,c,a,v,K(c,s)]Ks2) [K(c,s)]K(c,tgs)Receive Service from ServerClient sends Server1) Ticket T(c,s) = [s,c,a,v,K(c,s)]Ks2) authenticator = [c,t,key]K(c,s)Kerberos weaknesses⏹Replay is possible within time frame⏹TGS and Auth server are vulnerable as they know everything⏹Initial exchange passed on password authentication⏹Keys are vulnerableSESAME– Secure European System for Applications in a Multi-vendor Environment⏹Uses Needham-Schroeder protocol⏹Uses public key cryptography⏹Supports MD5 and CRC32 Hashing⏹Uses two tickets1)One contains authentication2)One contains the access rights to the clientSESAME weaknesses⏹Only authenticates by using first block of message⏹Initial exchange passed on password authentication⏹SESAME incorporates two certificates or tickets: One certificate provides authentication as inKerberos and the other certificate defines the access privileges that are assigned to a client. KryptoKnight⏹Peer to peer relationship between KDC – Key Distribution Center and parties (Client and Server)⏹NetSP is based on KryptoKnight⏹Supported by RACF⏹Authentication⏹Key Distribution⏹Data Privacy⏹Data Integrity⏹Single Sign-On⏹AdministrationAccess Control - Centralized and DecentralizedCentralized⏹RADIUS - Remote Access Dial-In User Service (incorporates an AS and dynamic password)⏹TACACS – Terminal Access Controller Access Control System (for network applications, static pwd) ⏹TACACS+ – Terminal Access Controller Access Control System Plus, supports token authentication CHAP – Challenge Handshake Authentication Protocol⏹Supports encryption, protects passwordDecentralizedRelational Database Security⏹Relational Databases support queries⏹Object oriented databases do not support queriesRelational Database⏹Data structures called tables (relations)⏹Integrity Rules on allowable values⏹Operators on the data in tablesPersistency – preservation of integrity through the use of nonvolatile storage mediaSchema⏹Description of the database⏹Defined by Data Description Layer (DDL)Database Management System (DBMS)⏹provides access to the database⏹Allows restriction of accessRelational Database⏹Relation (table) is the basis of a relational database – relation is represented by a table⏹Rows = Records (tuples)⏹Column = AttributesPrimary Key⏹Unambiguously identifies a record. Points to a record (tuple)⏹Every row (record, tuple) must contain the primary key of the relation (table)Cardinality - # of rows in a relationship (table)Degree - # of columns in a relationship (table)Candidate key - any identifier that is a unique to the recordForeign Key– any value that matches the primary key of another relation (table)Relational Database– best suited for textRelational Database Operations⏹Select – based on criteria i.e. all items with value > $300.00⏹Join - join tables based on a common value⏹Union– forms a new relation (table) from two other relations⏹View– (virtual table) uses join, project, select - Views can be used to restrict access (least privileges) ⏹Query plan⏹Comprised of implementation procedures, lowest cost plan based on ―cost‖⏹Costs are CPU time, Disk Access⏹Bind– used to create planData NormalizationEnsures that attributes in a table rely only on the primary key⏹Eliminates repeating groups⏹Eliminates redundant data⏹Eliminates attributes not dependent on the primary keySQL – Structured Query Language⏹Select⏹Update⏹Delete⏹Insert⏹Grant – Access Privileges⏹Revoke – Access PrivilegesObject Oriented Databases - OODB⏹Best suited for multi-media, graphics⏹Steep learning curve⏹High overheadIntrusion DetectionNetwork Based⏹Real Time⏹PassiveHost Based⏹System and event logs⏹Limited by log capabilitiesSignature Based – (Knowledge Based)⏹Signatures of an attack are stored and referenced⏹Failure to recognize slow attacks⏹Must have signature stored to identifyStatistical Anomaly Based (Behavior Based)⏹IDS determines ―normal‖ usage pro file using statistical samples⏹Detects anomaly from the normal profileAccess Control Issues⏹Confidentiality⏹Integrity⏹Availability⏹Accountability of usersMeasures for compensating for both internal and external access violations ⏹Backups⏹RAID – Redundant Array of Inexpensive Disks⏹Fault Tolerance⏹Business Continuity Planning⏹InsuranceDomain 3 – Telecom and Network SecurityManagement ConceptsTechnology Concepts⏹Confidentiality – no disclosure of data⏹Integrity – no alteration of data⏹Availability – no destruction of dataRemote Access Security ManagementRemote Connections⏹xDSL – Digital Subscriber Line⏹Cable modem⏹Wireless (PDAs)⏹ISDN – Integrated Services Digital NetworkSecuring External Remote Connections⏹VPN – Virtual Private Network⏹SSL – Secure Socket Layer⏹SSH – Secure ShellRemote Access Authentication⏹RADIUS – Remote Access Dial-In User Server⏹TACACS – Terminal Access Controller Access Control ServerRemote Node Authentication⏹PAP – Password Authentication Protocol – clear text⏹CHAP – Challenge Handshake Authentication Protocol – protects passwordRemote User Management⏹Justification of remote access⏹Support Issues⏹Hardware and software distributionIntrusion Detection⏹Notification⏹RemediationCreation of:⏹Host and networked based monitoring⏹Event Notification⏹CIRT – Computer Incident Response Team⏹CIRT Performs⏹Analysis of event⏹Response to incident⏹Escalation path procedures⏹Resolution – post implementation follow upIntrusion Detection Systems⏹Network Based– Commonly reside on a discrete network segment and monitor the traffic on thatnetwork segment.⏹Host Based– Use small programs, which reside on a host computer. Detect inappropriate activity onlyon the host computer, not the network segment.⏹Knowledge Based– Signature based⏹Behavioral Based– Statistical AnomalyCIRT – (CERT) – Computer Incident Response TeamResponsibilities:⏹Manage the company‘s response to events that pose a risk⏹Coordinating information⏹Mitigating risk, minimize interruptions⏹Assembling technical response teams⏹Management of logs⏹Management of resolutionNetwork Availability⏹RAID – Redundant Array of Inexpensive Disks⏹Back Up Concepts⏹Manage single points of failureRAID – Redundant Array of Inexpensive Disks⏹Fault tolerance against server crashes⏹Secondary – improve system performance⏹Striping – Caching and distributing on multiple disks⏹RAID employs the technique of striping, which involves partitioning each drive's storage space intounits ranging from a sector (512 bytes) up to several megabytes. The stripes of all the disks are interleaved and addressed in order.⏹Hardware and software implementationRAID Advisory Board⏹Three types –Failure Resistant Disk Systems (FRDS) - the only current standard, Failure TolerantDisk Systems, and Disaster Tolerant Disk Systems.⏹FRDS: provides the ability to reconstruct the contents of a failed disk onto a replacement disk.⏹Enables the continuous monitoring of these parts and the alerting of their failure⏹FRDS+⏹Protect from disk failure – can reconstruct disks by automatically hot swapping while server isrunning⏹Includes environmental⏹FRDS+ adds hazard warningsRAID LevelsRAID 0 (STRIPPING)⏹Creates one large disk by using multiple disks – striping⏹No redundancy⏹No fault tolerance (1 fail = all fail)⏹Read/Write performance is increasedRAID 1 (MIRRORING)⏹Mirroring⏹Duplicates data on other disks (usually one to one ratio)⏹Expensive (doubles cost of storage)RAID 2 (HAMMING CODE PARITY)⏹Multiple disks⏹Parity information created using a hamming code⏹Can be used in 39 disk array 32 Data and 7 recovery⏹Not used, replaced by more flexible levelsRAID 3 (BYTE LEVEL PARITY) RAID 4 (BLOCK LEVEL PARITY)⏹RAID 3 – Byte level⏹RAID 4 – Block level⏹Stripe across multiple drives⏹Parity information on a parity drive⏹Provides redundancy⏹Can affect performance with single parity driveRAID 5 (INTERLEAVE PARITY)⏹Most popular⏹Stripes data and parity information across all drives⏹Uses interleave parity⏹Reads and writes performed concurrently⏹Usually 3-5 drives. If one drive fails, can reconstruct the failed drive by using the information from theother 2.RAID 7 (SINGLE VIRTUAL DISK)⏹Functions as a single virtual disk⏹Usually software over Level 5 hardware⏹Enables the drive array to continue to operate if any disk or any path to any disk fails.RAID Summary0 – Striping1 – Mirroring2 – Hamming code parity3 – Byte level parity4 – Block level parity5 – Interleave parity7 – Single Virtual DiskOther Types of Fault ToleranceRedundant Servers⏹Primary Server mirrors to secondary server⏹Fail-over or rollover to secondary in the event of a failure⏹Server fault tolerance can be warm or hotServer Cluster⏹Group of independent servers managed as a single system⏹Load Balancing⏹Improves performance⏹―Server Farm‖⏹Microsoft Cluster ServerBackup MethodologiesFull Back Up– every fileIncremental⏹Only files that have been changed or added recently⏹Only files with their archive bit set are backed up.⏹This method is fast and uses less tape space but has some inherent vulnerabilities, one being that allincremental backups need to be available and restored from the date of the last full backup to the desired date should a restore be needed.⏹Restore = last full backup plus each incrementalDifferential⏹Only files that have changed since the last backup⏹All files to the full backup (additive)⏹Restore = full backup plus the last differentialTypes of Tape⏹DAT – Digital Audio Tape⏹QIC – Quarter Inch Cartridge – Small and slow⏹8mm Tape – Superceded by DLT⏹DLT – Digital Linear Tape – 4mm tape – large and fastOther mediaCD – permanent backups, longer shelf life than tapeZIP – JAZZ – CommonTape Array – 32 to 63 Tape Array using RAID technologyHSM – Hierarchical. Provides a continuous on-line backup by usin g optical or tape ‗jukeboxes‘, similar to WORMs.Common Backup Problems⏹Slow transfer of data to backup⏹Retrieval time to restore⏹Off hour processing and monitoring⏹Server disk space expands over time⏹Loss of data between last back up⏹Physical security of tapesSingle Points of FailureCabling Failures–⏹Coaxial: many workstations or servers attached to the same segment of cable, which creates a singlepoint of failure if it is broken (similar to cable TV cabling). Exceeding cable length is a source of failure.⏹Twisted Pair: (CAT3 and CAT 5) The difference between the two has to do with the tightness thecopper wires are wound. Tightness determines its resistance to interference. CAT3 is older. Cable length is a common failure⏹Fiber Optic: Immune to EMI. Longer usable length (upto 2kms). Drawback is costs.Technology FailuresEthernet⏹Most Popular⏹Extremely resistance to failure, especially in a star-wired config.Token Ring⏹Since token is passed by every station on the ring。
ISO 26262-4

Reference numberISO 26262-4:2011(E)© ISO 2011INTERNATIONALSTANDARD ISO 26262-4First edition2011-11-15Road vehicles — Functional safety —Part 4: Product development at the system levelVéhicules routiers — Sécurité fonctionnelle —Partie 4: Développement du produit au niveau du systèmeISO 26262-4:2011(E)COPYRIGHT PROTECTED DOCUMENT © ISO 2011All rights reserved. Unless otherwise specified, no part of this publication may be reproduced or utilized in any form or by any means, electronic or mechanical,including photocopying and microfilm, without permission in writing from either ISO at the address below or ISO's member body in the country of the requester.ISO copyright office Case postale 56CH-1211 Geneva 20 Tel. + 41 22 749 01 11Fax + 41 22 749 09 47E-mail copyright@Web Published in Switzerlandii © ISO 2011 – All rights reservedISO 26262-4:2011(E)Contents PageForeword (v)Introduction ........................................................................................................................................................ v i 1Scope (1)2Normative references (2)3Terms, definitions and abbreviated terms (2)4Requirements for compliance (2)4.1General requirements (2)4.2Interpretations of tables (3)4.3ASIL-dependent requirements and recommendations (3)5Initiation of product development at the system level (3)5.1Objectives (3)5.2General (4)5.3Inputs to this clause (6)5.4Requirements and recommendations (6)5.5Work products (6)6Specification of the technical safety requirements (7)6.1Objectives (7)6.2General (7)6.3Inputs to this clause (7)6.4Requirements and recommendations (7)6.5Work products (10)7System design (10)7.1Objectives (10)7.2General (11)7.3Inputs to this clause (11)7.4Requirements and recommendation (11)7.5Work products (16)8Item integration and testing (16)8.1Objectives (16)8.2General (16)8.3Inputs to this clause (16)8.4Requirements and recommendation (17)8.5Work products (25)9Safety validation (25)9.1Objectives (25)9.2General (25)9.3Inputs to this clause (26)9.4Requirements and recommendation (26)9.5Work products (27)10Functional safety assessment (28)10.1Objectives (28)10.2General (28)10.3Inputs to this clause (28)10.4Requirements and recommendation (28)10.5Work products (28)11Release for production (28)© ISO 2011 – All rights reserved iiiISO 26262-4:2011(E)11.1Objectives (28)11.2General (29)11.3Inputs to this clause (29)11.4Requirements and recommendations (29)11.5Work products (30)Annex A (informative) Overview and document flow of product development at the system level (31)Annex B (informative) Example contents of hardware-software interface (33)Bibliography (36)iv © ISO 2011 – All rights reservedISO 26262-4:2011(E)ForewordISO (the International Organization for Standardization) is a worldwide federation of national standards bodies (ISO member bodies). The work of preparing International Standards is normally carried out through ISO technical committees. Each member body interested in a subject for which a technical committee has been established has the right to be represented on that committee. International organizations, governmental and non-governmental, in liaison with ISO, also take part in the work. ISO collaborates closely with the International Electrotechnical Commission (IEC) on all matters of electrotechnical standardization. International Standards are drafted in accordance with the rules given in the ISO/IEC Directives, Part 2.The main task of technical committees is to prepare International Standards. Draft International Standards adopted by the technical committees are circulated to the member bodies for voting. Publication as an International Standard requires approval by at least 75 % of the member bodies casting a vote.Attention is drawn to the possibility that some of the elements of this document may be the subject of patent rights. ISO shall not be held responsible for identifying any or all such patent rights.ISO 26262-4 was prepared by Technical Committee ISO/TC 22, Road vehicles, Subcommittee SC 3, Electrical and electronic equipment.ISO 26262 consists of the following parts, under the general title Road vehicles — Functional safety: Part 1: VocabularyPart 2: Management of functional safetyPart 3: Concept phasePart 4: Product development at the system levelPart 5: Product development at the hardware levelPart 6: Product development at the software levelPart 7: Production and operationPart 8: Supporting processesPart 9: Automotive Safety Integrity Level (ASIL)-oriented and safety-oriented analysesPart 10: Guideline on ISO 26262© ISO 2011 – All rights reserved vISO 26262-4:2011(E)IntroductionISO 26262 is the adaptation of IEC 61508 to comply with needs specific to the application sector of electrical and/or electronic (E/E) systems within road vehicles.This adaptation applies to all activities during the safety lifecycle of safety-related systems comprised of electrical, electronic and software components.Safety is one of the key issues of future automobile development. New functionalities not only in areas such as driver assistance, propulsion, in vehicle dynamics control and active and passive safety systems increasingly touch the domain of system safety engineering. Development and integration of these functionalities will strengthen the need for safe system development processes and the need to provide evidence that all reasonable system safety objectives are satisfied.With the trend of increasing technological complexity, software content and mechatronic implementation, there are increasing risks from systematic failures and random hardware failures. ISO 26262 includes guidance to avoid these risks by providing appropriate requirements and processes.System safety is achieved through a number of safety measures, which are implemented in a variety of technologies (e.g. mechanical, hydraulic, pneumatic, electrical, electronic, programmable electronic) and applied at the various levels of the development process. Although ISO 26262 is concerned with functional safety of E/E systems, it provides a framework within which safety-related systems based on other technologies can be considered. ISO 26262:a) provides an automotive safety lifecycle (management, development, production, operation, service,decommissioning) and supports tailoring the necessary activities during these lifecycle phases;b) provides an automotive-specific risk-based approach to determine integrity levels [Automotive SafetyIntegrity Levels (ASIL)];c) uses ASILs to specify applicable requirements of ISO 26262 so as to avoid unreasonable residual risk;d) provides requirements for validation and confirmation measures to ensure a sufficient and acceptablelevel of safety being achieved;e) provides requirements for relations with suppliers.Functional safety is influenced by the development process (including such activities as requirements specification, design, implementation, integration, verification, validation and configuration), the production and service processes and by the management processes.Safety issues are intertwined with common function-oriented and quality-oriented development activities and work products. ISO 26262 addresses the safety-related aspects of development activities and work products.Figure 1 shows the overall structure of this edition of ISO 26262. ISO 26262 is based upon a V-model as a reference process model for the different phases of product development. Within the figure:the shaded “V”s represent the interconnection between ISO 26262-3, ISO 26262-4, ISO 26262-5, ISO 26262-6 and ISO 26262-7;the specific clauses are indicated in the following manner: “m-n”, where “m” represents the number of the particular part and “n” indicates the number of the clause within that part.EXAMPLE “2-6” represents Clause 6 of ISO 26262-2.vi © ISO 2011 – All rights reservedISO 26262-4:2011(E)Figure 1 — Overview of ISO 26262© ISO 2011 – All rights reserved viiINTERNATIONAL STANDARD ISO 26262-4:2011(E)© ISO 2011 – All rights reserved1Road vehicles — Functional safety —Part 4: Product development at the system level1 ScopeISO 26262 isintended to be applied to safety-related systems that include one or more electrical and/or electronic (E/E)systems and that are installed in series production passenger cars with a maximum gross vehicle mass up to 3 500 kg. ISO 26262 does not addressunique E/E systems in special purpose vehicles such as vehicles designed for drivers with disabilities.Systems andtheir components released for production, or systems and their components already under developmentprior to the publication date of ISO 26262, are exempted from the scope. For further developmentor alterations based on systems and their components released for production prior to the publication of ISO 26262, only the modifications will be developed in accordance with ISO 26262.ISO 26262 addressespossible hazards caused by malfunctioning behaviour of E/E safety-related systems, including interaction of these systems. It does not address hazards related to electric shock, fire, smoke, heat, radiation, toxicity,flammability, reactivity, corrosion, release of energy and similar hazards, unless directly caused by malfunctioning behaviour of E/E safety-related systems.ISO 26262 doesnot address the nominal performance of E/E systems, even if dedicated functional performancestandards exist for these systems (e.g. active and passive safety systems, brake systems, Adaptive Cruise Control).This part of ISO 26262 specifies the requirements for product development at the system level for automotive applications, including the following:requirements for the initiation of product development at the system level,specification of the technical safety requirements,the technical safety concept,system design,item integration and testing,safety validation,functional safety assessment, andproduct release.ISO 26262-4:2011(E)2 Normative referencesThe following referenced documents are indispensable for the application of this document. For dated references, only the edition cited applies. For undated references, the latest edition of the referenced document (including any amendments) applies.ISO 26262-1:2011, Road vehicles — Functional safety — Part 1: VocabularyISO 26262-2:2011, Road vehicles — Functional safety — Part 2: Management of functional safetyISO 26262-3:2011, Road vehicles — Functional safety — Part 3: Concept phaseISO 26262-5:2011, Road vehicles — Functional safety — Part 5: Product development at the hardware levelISO 26262-6:2011, Road vehicles — Functional safety — Part 6: Product development at the software levelISO 26262-7:2011, Road vehicles — Functional safety — Part 7: Production and operationISO 26262-8:2011, Road vehicles — Functional safety — Part 8: Supporting processesISO 26262-9:2011, Road vehicles — Functional safety — Part 9: Automotive Safety Integrity Level (ASIL)-oriented and safety-oriented analyses3 Terms, definitions and abbreviated termsFor the purposes of this document, the terms, definitions and abbreviated terms given in ISO 26262-1:2011 apply.4 Requirements for compliance4.1 General requirementsWhen claiming compliance with ISO 26262, each requirement shall be complied with, unless one of the following applies:a) tailoring of the safety activities in accordance with ISO 26262-2 has been planned and shows that therequirement does not apply, orb) a rationale is available that the non-compliance is acceptable and the rationale has been assessed inaccordance with ISO 26262-2.Information marked as a “NOTE” or “EXAMPLE” is only for guidance in understanding, or for clarification of the associated requirement, and shall not be interpreted as a requirement itself or as complete or exhaustive.The results of safety activities are given as work products. “Prerequisites” are information which shall be available as work products of a previous phase. Given that certain requirements of a clause are ASIL-dependent or may be tailored, certain work products may not be needed as prerequisites.“Further supporting information” is information that can be considered, but which in some cases is not required by ISO 26262 as a work product of a previous phase and which may be made available by external sources that are different from the persons or organizations responsible for the functional safety activities.2 © ISO 2011 – All rights reserved4.2 Interpretations of tablesTables are normative or informative depending on their context. The different methods listed in a table contribute to the level of confidence in achieving compliance with the corresponding requirement. Each method in a table is eithera) a consecutive entry (marked by a sequence number in the leftmost column, e.g. 1, 2, 3), orb) an alternative entry (marked by a number followed by a letter in the leftmost column, e.g. 2a, 2b, 2c).For consecutive entries, all methods shall be applied as recommended in accordance with the ASIL. If methods other than those listed are to be applied, a rationale shall be given that these fulfil the corresponding requirement.For alternative entries, an appropriate combination of methods shall be applied in accordance with the ASIL indicated, independent of whether they are listed in the table or not. If methods are listed with different degrees of recommendation for an ASIL, the methods with the higher recommendation should be preferred. A rationale shall be given that the selected combination of methods complies with the corresponding requirement.NOTE A rationale based on the methods listed in the table is sufficient. However, this does not imply a bias for or against methods not listed in the table.For each method, the degree of recommendation to use the corresponding method depends on the ASIL and is categorized as follows:“++” indicates that the method is highly recommended for the identified ASIL;“+” indicates that the method is recommended for the identified ASIL;“o” indicates that the method has no recommendation for or against its usage for the identified ASIL.4.3 ASIL-dependent requirements and recommendationsThe requirements or recommendations of each subclause shall be complied with for ASIL A, B, C and D, if not stated otherwise. These requirements and recommendations refer to the ASIL of the safety goal. If ASIL decomposition has been performed at an earlier stage of development, in accordance with ISO 26262-9:2011, Clause 5, the ASIL resulting from the decomposition shall be complied with.If an ASIL is given in parentheses in ISO 26262, the corresponding subclause shall be considered as a recommendation rather than a requirement for this ASIL. T his has no link with the parenthesis notation related to ASIL decomposition.5 Initiation of product development at the system level5.1 ObjectivesThe objective of the initiation of the product development at the system level is to determine and plan the functional safety activities during the individual subphases of system development. This also includes the necessary supporting processes described in ISO 26262-8.This planning of system-level safety activities will be included in the safety plan.© ISO 2011 – All rights reserved34 © ISO 2011 – All rights reserved5.2 GeneralThe necessary activities during the development of a system are given in Figure 2. After the initiation of product development and the specification of the technical safety requirements, the system design is performed. During system design the system architecture is established, the technical safety requirements are allocated to hardware and software, and, if applicable, on other technologies. In addition, the technical safety requirements are refined and requirements arising from the system architecture are added, including the hardware-software interface (HSI). Depending on the complexity of the architecture, the requirements for subsystems can be derived iteratively. After their development, the hardware and software elements are integrated and tested to form an item that is then integrated into a vehicle. Once integrated at the vehicle level, safety validation is performed to provide evidence of functional safety with respect to the safety goals.ISO 26262-5 and ISO 26262-6 describe the development requirements for hardware and software. This part of ISO 26262 applies to both the development of systems and subsystems. Figure 3 is an example of a system with multiple levels of integration, illustrating the application of this part of ISO 26262, ISO 26262-5 and ISO 26262-6.NOTE 1 Table A.1 provides an overview of objectives, prerequisites and work products of the particular subphases of product development at the system level.ײ·¬·¿¬·±² ±º °®±¼«½¬ ¼»ª»´±°³»²¬ ¿¬ ¬¸» -§-¬»³ ´»ª»´ìóëÍ°»½·º·½¿¬·±² ±º ¬¸» ¬»½¸²·½¿´ -¿º»¬§®»¯«·®»³»²¬-ìóê׬»³ ·²¬»¹®¿¬·±² ¿²¼ ¬»-¬·²¹ìóèÍ¿º»¬§ ª¿´·¼¿¬·±²ìóçÚ«²½¬·±²¿´ -¿º»¬§ ¿--»--³»²¬ìóïðλ´»¿-» º±® °®±¼«½¬·±²ìóïïͧ-¬»³ ¼»-·¹²ìóéﮬ ìæ Ю±¼«½¬ ¼»ª»´±°³»²¬æ -§-¬»³ ´»ª»´NOTE 2 Within the figure, the specific clauses of each part of ISO 26262 are indicated in the following manner: “m-n”, where “m” represents the number of the part and “n” indicates the number of the clause, e.g. “4-5” represents Clause 5 of ISO 26262-4.Figure 2 — Reference phase model for the development of a safety-related item© ISO 2011 – All rights reserved5NOTE Within the figure, the specific clauses of each part of ISO 26262 are indicated in the following manner: “m-n”, where “m” represents the number of the part and “n” indicates the number of the clause, e.g. “4-5” represents Clause 5 of ISO 26262-4.Figure 3 — Example of a product development at the system level5.3 Inputs to this clause5.3.1 PrerequisitesThe following information shall be available:project plan (refined) in accordance with ISO 26262-2:2011, 6.5.2;safety plan in accordance with ISO 26262-3:2011, 6.5.2;functional safety assessment plan in accordance with ISO 26262-2:2011, 6.5.4; andfunctional safety concept in accordance with ISO 26262-3:2011, 8.5.1.5.3.2 Further supporting informationThe following information can be considered:preliminary architectural assumptions (from external source); anditem definition (see ISO 26262-3:2011, 5.5).5.4 Requirements and recommendations5.4.1 The safety activities for the product development at the system level shall be planned including determination of appropriate methods and measures during design and integration.NOTE The results of planning of the verification activities during design in accordance with 6.4.6 (Verification and validation) and 7.4.8 (Verification of system design) are part of the safety plan while the planning of item integration and testing in accordance with 8.4.2 (hardware/software), 8.4.3 (element integration) and 8.4.4 (item integration) is represented in a separate item integration and testing plan in accordance with requirement 8.4.1.3.5.4.2 The validation activities shall be planned.5.4.3 The functional safety assessment activities for the product development at the system level shall be planned (see also ISO 26262-2).NOTE An example of a functional safety assessment agenda is provided in ISO 26262-2:2011, Annex E.5.4.4 The tailoring of the lifecycle for product development at system level shall be performed in accordance with ISO 26262-2, and based on the reference phase model given in Figure 2.NOTE The project plan can be used to provide the relationship between the individual subphases of product development at the system level and the hardware and software development phases. This can include the integration steps at each level.5.5 Work products5.5.1 Project plan (refined) resulting from requirement 5.4.4.5.5.2 Safety plan (refined) resulting from requirement 5.4.1 to 5.4.4.5.5.3 Item integration and testing plan resulting from requirement 5.4.1.5.5.4 Validation plan resulting from requirement 5.4.2.5.5.5 Functional safety assessment plan (refined) resulting from requirement 5.4.3.6 © ISO 2011 – All rights reserved6 Specification of the technical safety requirements6.1 ObjectivesThe first objective of this subphase is to specify the technical safety requirements. The technical safety requirements specification refines the functional safety concept, considering both the functional concept and the preliminary architectural assumptions (see ISO 26262-3).The second objective is to verify through analysis that the technical safety requirements comply with the functional safety requirements.6.2 GeneralWithin the overall development lifecycle, the technical safety requirements are the technical requirements necessary to implement the functional safety concept, with the intention being to detail the item-level functional safety requirements into the system-level technical safety requirements.NOTE Regarding the avoidance of latent faults, requirements elicitation can be performed after a first iteration of the system design subphase.6.3 Inputs to this clause6.3.1 PrerequisitesThe following information shall be available:functional safety concept in accordance with ISO 26262-3:2011, 8.5.1; andvalidation plan in accordance with 5.5.4.6.3.2 Further supporting informationThe following information can be considered:safety goals (see ISO 26262-3:2011, 7.5.2);functional concept (from external source, see ISO 26262-3:2011, 5.4.1); andpreliminary architectural assumptions (from external source, see ISO 26262-3:2011, 8.3.2).6.4 Requirements and recommendations6.4.1 Specification of the technical safety requirements6.4.1.1 The technical safety requirements shall be specified in accordance with the functional safety concept, the preliminary architectural assumptions of the item and the following system properties:a) the external interfaces, such as communication and user interfaces, if applicable;b) the constraints, e.g. environmental conditions or functional constraints; andc) the system configuration requirements.NOTE The ability to reconfigure a system for alternative applications is a strategy to reuse existing systems. EXAMPLE Calibration data (see ISO 26262-6:2011, Annex C) is frequently used to customise electronic engine control units for alternate vehicles.© ISO 2011 – All rights reserved76.4.1.2 The consistency of the preliminary architectural assumptions in ISO 26262-3:2011, 8.3.2 and the preliminary architecture assumptions in this subphase shall be ensured.6.4.1.3 If other functions or requirements are implemented by the system or its elements, in addition to those functions for which technical safety requirements are specified in accordance with 6.4.1 (Specification of the technical safety requirements), then these functions or requirements shall be specified or references made to their specification.EXAMPLE Other requirements are coming from Economic Commission for Europe (ECE) rules, Federal Motor Vehicle Safety Standard (FMVSS) or company platform strategies.6.4.1.4 The technical safety requirements shall specify safety-related dependencies between systems or item elements and between the item and other systems.6.4.2 Safety mechanisms6.4.2.1 The technical safety requirements shall specify the response of the system or elements to stimuli that affect the achievement of safety goals. This includes failures and relevant combinations of stimuli in combination with each relevant operating mode and defined system state.EXAMPLE The Adaptive Cruise Control (ACC) ECU disables the ACC functionality if informed by the brake system ECU that the Vehicle Stability Control functionality is unavailable.6.4.2.2 The technical safety requirements shall specify the necessary safety mechanisms (see ISO 26262-8:2011, Clause 6) including:a) the measures relating to the detection, indication and control of faults in the system itself;NOTE 1 This includes the self-monitoring of the system or elements to detect random hardware faults and, if appropriate, to detect systematic failures.NOTE 2 This includes measures for the detection and control of failure modes of the communication channels (e.g.data interfaces, communication buses, wireless radio link).b) the measures relating to the detection, indication and control of faults in external devices that interact withthe system;EXAMPLE External devices include other electronic control units, power supply or communication devices.c) the measures that enable the system to achieve or maintain a safe state;NOTE 3 This includes prioritization and arbitration logic in the case of conflicting safety mechanisms.d) the measures to detail and implement the warning and degradation concept; ande) the measures which prevent faults from being latent [see 6.4.4 (Avoidance of latent faults)].NOTE 4 These measures are usually related to tests that take place during power up (pre-drive checks), as in the case of measures a) to d), during operation, during power-down (post-drive checks), and as part of maintenance.6.4.2.3 For each safety mechanism that enables an item to achieve or maintain a safe state the following shall be specified:a) the transition to the safe state;NOTE 1 This includes the requirements to control the actuators.b) the fault tolerant time interval;NOTE 2 In-vehicle testing and experimentation can be used to determine the fault tolerant time interval.8 © ISO 2011 – All rights reservedc) the emergency operation interval, if the safe state cannot be reached immediately; andNOTE 3 In-vehicle testing and experimentation can be used to determine the emergency operation interval.EXAMPLE 1 Switching off can be an emergency operation.d) the measures to maintain the safe state.EXAMPLE 2 A safety mechanism for a brake-by-wire application, which depends on the power supply, can include the specification of a secondary power supply or storage device (capacity, time to activate and operate, etc.).6.4.3 ASIL Decomposition6.4.3.1 If ASIL decomposition is applied during the specification of the technical safety requirements it shall be applied in accordance with ISO 26262-9:2011, Clause 5 (Requirements decomposition with respect to ASIL tailoring).6.4.4 Avoidance of latent faults6.4.4.1 This requirement applies to ASILs (A), (B), C, and D, in accordance with 4.3: if applicable, safety mechanisms shall be specified to prevent faults from being latent.NOTE 1 Concerning random faults, only multiple-point faults have the potential to include latent faults.EXAMPLE On-board tests are safety mechanisms which verify the status of components during the different operation modes such as power-up, power-down, at runtime or in an additional test mode to detect latent faults. Valve, relay or lamp function tests that take place during power up routines are examples of such on-board tests.NOTE 2 Evaluation criteria that identify the need for safety measures preventing faults from being latent are derived in accordance with good engineering practice. The latent fault metric, given in ISO 26262-5:2011, Clause 8, provides evaluation criteria.6.4.4.2 This requirement applies to ASILs (A), (B), C, and D, in accordance with 4.3: to avoid multiple-point failures, the multiple-point fault detection interval shall be specified for each safety mechanism implemented in accordance with 6.4.4 (Avoidance of latent faults).6.4.4.3 This requirement applies to ASILs (A), (B), C, and D, in accordance with 4.3: to determine the multiple-point fault detection interval, the following parameters should be considered:a) the reliability of the hardware component with consideration given to its role in the architecture;b) the probability of exposure of the corresponding hazardous event(s);c) the specified quantitative target values for the maximum probability of violation of each safety goal due tohardware random failures (see requirement 7.4.4.3); andd) the assigned ASIL of the related safety goal.NOTE The use of the following measures depends on the time constraints:periodic testing of the system or elements during operation;on board tests of elements during power-up or power-down; andtesting the system or elements during maintenance.© ISO 2011 – All rights reserved9。
potential leak of memory pointed to by

potential leak of memory pointed to byPotential Leak of Memory Pointed to by a PointerIn software development, a memory leak occurs when a program fails to release memory that is no longer needed, leading to a gradual depletion of available memory resources. In this case, we are specifically concerned with a potential leak of memory pointed to by a pointer.A pointer is a variable that holds the memory address of another variable. It allows programmers to access and manipulate data indirectly, which can be quite useful. However, if a pointer is not properly managed, it can lead to memory leaks.When a pointer is assigned to dynamically allocated memory, it becomes the responsibility of the programmer to release that memory when it is no longer needed. If the programmer forgets to free the memory or loses track of the pointer, a memory leak may occur.In a potential leak scenario, a pointer is assigned to a block of memory using dynamic memory allocation, but the memory isnot freed before the pointer goes out of scope or is reassigned to a different memory block. As a result, the memory becomes orphaned and cannot be accessed or reused, causing a waste of resources.Memory leaks can have serious consequences for a program. As more memory is leaked, the available memory pool decreases, leading to performance degradation and potentially causing the program to crash or become unresponsive. In long-running programs, memory leaks can accumulate over time, leading to severe memory exhaustion.To avoid potential leaks of memory pointed to by a pointer, it is crucial to follow best practices for memory management. This includes proper allocation and deallocation of memory using functions like malloc() and free(), respectively. It is also important to keep track of all allocated memory and ensure that it is released when it is no longer needed.Additionally, tools like memory profilers and debuggers can help identify memory leaks by tracking memory allocations and deallocations during program execution. These tools canprovide valuable insights into the allocation patterns and help pinpoint the source of potential leaks.In conclusion, a potential leak of memory pointed to by a pointer can occur when dynamic memory allocation is not properly managed. It is essential for programmers to be vigilant and ensure that all allocated memory is freed when it is no longer needed to prevent memory leaks and maintain the efficiency and stability of their programs.。
DELL服务器LCD报错代码(全)

E1210 Motherboard battery failure. Check battery.(母板电池故障。
请检查电池。
)CMOS 电池丢失,或电压超出许可范围。
请参阅"系统电池故障排除"。
E1211 RAID Controller battery failure. Check battery.(RAID 控制器电池故障。
请检查电池。
)RAID 电池丢失、损坏或因温度问题而无法再充电。
重新插入RAID 电池连接器。
请参阅"安装RAID 电池"和"系统冷却问题故障排除"。
E1216 3.3V Regulator failure. Reseat PCIe cards.(3.3V 稳压器故障。
请重置PCIe 卡。
)3.3V 稳压器出现故障。
请卸下并重置PCIe 扩充卡。
如果问题仍然存在,请参阅"扩充卡故障排除"。
E1229 CPU # VCORE Regulator failure. Reseat CPU.(CPU # VCORE 稳压器故障。
请重置CPU。
)特定处理器VCORE 稳压器出现故障。
请重置处理器。
请参阅"处理器故障排除"。
如果问题仍然存在,请参阅"获得帮助"。
E122A CPU # VTT Regulator failure. Reseat CPU.(CPU # VTT 稳压器故障。
请重置CPU。
)特定处理器VTT 稳压器出现故障。
请重置处理器。
请参阅"处理器故障排除"。
如果问题仍然存在,请参阅"获得帮助"。
E122C CPU Power Fault. Power cycle AC.(CPU 电源故障。
请关闭交流电源再打开。
)接通处理器电源时检测到电源故障。
断开系统的交流电源10 秒,然后重新启动系统。
如果问题仍然存在,请参阅"获得帮助"。
MIC2033 高精度高侧固定电流限制电源分布开关说明书
MIC2033 Evaluation BoardHigh-Accuracy, High-Side, Fixed Current Limit Power SwitchMicrel Inc. • 2180 Fortune Drive • San Jose, CA 95131 • USA • tel +1 (408) 944-0800 • fax + 1 (408) 474-1000 •General DescriptionThe MIC2033 is a high-side MOSFET power distribution switch providing increased system reliability using 5% current limit accuracy.The MIC2033 has an operating input voltage range from 2.5V to 5.5V, is internally current limited, and has thermal shutdown to protect the device and system. The MIC2033 is offered with either active-high or active-low logic level enable input controls. It has an open drain fault status output flag with a built-in 32ms delay that asserts low during overcurrent or thermal shutdown conditions.The MIC2033 is available with several different fixed current limit options: 0.5A, 0.8A, 1A, and 1.2A. A capacitor-adjustable soft-start circuit minimizes inrush current in applications using high capacitive loads.The MIC2033 is offered in both 6-pin SOT-23 and 6-pin 2mm x 2mm thin DFN packages. It has an operating junction temperature range of −40°C to +125°C. RequirementsThe MIC2033 evaluation board requires a single power supply to provide V IN . The V IN power supply must be able to deliver a minimum of 2.5V and more than 1.5A capability. The output load can either be active or passive. PrecautionsThe evaluation board does not have reverse polarity protection. Applying a negative voltage to the V IN terminal can damage the device. In addition, the maximum V IN operating voltage of the MIC2033 evaluation board is 5.5V. Exceeding 5.5V on V IN can permanently damage the device.Getting Started1. Connect an external supply to the V IN terminal .Apply the desired input voltage to the V IN and ground terminals of the evaluation board, paying careful attention to polarity and supply voltage. The user can place an ammeter between the input supply and the V IN terminal to the evaluation board. Make sure that the supply voltage is monitored at the V IN terminal. The ammeter and/or power lead resistance can reduce the voltage supplied to the input.2. Connect the load to the V OUT and ground terminals.The load can be either passive (resistive) or active (as in an electronic load). The user can place an ammeter between the load and the V OUT terminal. Make sure that the output voltage is monitored at the V OUT terminal.3. Enable the switchThe MIC2033-12AYxx evaluation boards are configured for default enable using a 10k Ω pull-up resistor from the ENABLE pin to VIN. To disable the switch, place a jumper short across the jumper pins at TP2. The MIC2033-05BYxx evaluation boards are configured for default disable. To enable the switch, place a jumper short across the jumper pins at TP2. 4. Fault detectionThe MIC2033 is equipped with an error flag, FAULT/. TP3 is provided to monitor the FAULT/ pin.Ordering InformationPart Number DescriptionMIC2033-05BYM6 EV Evaluation board featuring the MIC2033-05BYM6 500mA Switch MIC2033-12AYM6 EV Evaluation board featuring the MIC2033-12AYM6 1.2A Switch MIC2033-05BYMT EV Evaluation board featuring the MIC2033-05BYMT 500mA Switch MIC2033-12AYMT EVEvaluation board featuring the MIC2033-12AYMT 1.2A SwitchApplication InformationSoft-StartSoft-start reduces the power supply input surge current at startup by controlling the output voltage rise time. The input surge appears while the output capacitor is charged up. A slower output rise time draws a lower input surge current.During soft-start, an internal current sink discharges the external capacitor at CSLEW to ground to control the ramp of the output voltage. The output voltage rise time depends on the value of C CSLEW, the input voltage, output voltage, and the current limit. Micrel recommends that the value of the CSLEW external capacitor be in the range of 0.1µF to 1µF. For the MIC2033 evaluation board, CSLEW = C3 = 0.1µF. Output VoltageThe MIC2033 evaluation board is available with either a 0.5A or 1.2A fixed current limit. If the output current exceeds the current limit, the MIC2033 switch enters constant current limit mode. The maximum allowable current limit can be less than the full specified and/or expected current if the MIC2033 is not mounted on a circuit board with sufficiently low thermal resistance. The MIC2033 responds to short circuits within 10µs to limit the output current. It also provides an output fault flag that asserts (low) for an overcurrent condition that lasts longer than the overcurrent fault response delay time (t FAULT/), which is typically 32ms.MIC2033-xxxYMx Evaluation Board SchematicsMIC2033-xxxYMT Evaluation BoardMIC2033-xxxYM6 Evaluation BoardBill of MaterialsNumber Manufacturer Description Qty. Item PartC1608X5R0J105K TDK(1)C1, C21.0µF/6.3V ceramic capacitor, X5R, 0603 206036D105KAT2A AVX(2)06033C104KAT2A TDK0.1µF/25V ceramic capacitor, X7R, 0603 1C3C1608X7R1E104K AVXR1, R2 CRCW060310K0FKEA Vishay/Dale(3) 10.0kΩ, film resistor, 0603, 1% 2U1 MIC2033-xxxYMx Micrel(4)High-accuracy, high-side, fixed current limit power switch 1Notes:1. TDK: .2. AVX: .3. Vishay: .4. Micrel, Inc.: .Evaluation Board PCB LayoutMIC2033-xxxYMT Evaluation Board – Top LayerMIC2033-xxxYMT Evaluation Board – Bottom LayerEvaluation Board PCB Layout (Continued)MIC2033-xxxYM6 Evaluation Board – Top LayerMIC2033-xxxYM6 Evaluation Board – Bottom Layer。
Ansys Icepak高级培训教材
•
•
The power that is not converted to perform useful electromagnetic work is lost in the form of heat to the surroundings 没有转换成电磁功率的热耗散到了周围的环境 The power wasted as heat includes: 热耗包括
为满足chip的尺寸,封装的footprint降低
Package pin pitch is decreasing 封装的pin pitch减少 Clock speed is increasing 时钟速度提高 IC chips are performing more complex tasks
IC chips功能更复杂
Source: Sandia National Laboratories
1 2 18 100 3
1 2 22 120 3
1 2 28 140 3
Commodity: Low cost (<$300) consumer products Hand-Held: Battery powered (<$1000) products such as cellular, etc. Cost/Performance: Maximum performance with cost limit (<$300) (Notebooks,etc.) High Performance: Performance is the primary driver (Servers, Avionics, etc.) Harsh Environment: Automotive, Military, etc.
电脑报错的中文意思
电脑各种错误信息的中文意思网络技术 2010-04-26 14:52:32 阅读30601评论1 字号:大中小订阅 .一、B IOS中的提示信息提示信息说明Driv e A e rror驱动器A错误S ystem halt系统挂起Ke yboar d con troll er er ror 键盘控制器错误K eyboa rd er ror o r nokeybo ard p resen t 键盘错误或者键盘不存在BIOS ROMcheck sum e rrorBIOSROM 校验错误Sing le ha rdisk cabl e fai l 当硬盘使用Cab le选项时硬盘安装位置不正确FDD Cont rolle r Fai lureBIOS软盘控制器错误HDD C ontro llerFailu re BI OS 硬盘控制器错误Dr iverError驱动器错误C acheMemor y Bad, Donot E nable Cach e 高速缓存Cach e损坏,不能使用Erro r: Un ableto co ntrol A20line错误提示:不能使用A20地址控制线Memor y wri te/Re ad fa ilure内存读写失败Memor y all ocati on er ror 内存定位错误CM OS Ba ttery stat e Low CMOS没电了Keyb oardinter faceerror键盘接口错误Harddiskdrive fail ure 加载硬盘失败Ha rd di sk no t pre sent硬盘不存在Fl oppydisk(s) fa il (40) 软盘驱动器加载失败,一般是数据线插反,电源线没有插接,CMOS内部软驱设置错误CMOScheck sum e rror-efaul ts lo aded. CMOS校验错误,装入缺省(默认)设置二、BIOS刷新失败后,Boot block启动时出现的提示信息提示信息说明Det ectin g flo ppy d riveA med ia...检测软驱A的格式Dri ve me dia i s : 1.44Mb1.2Mb 720K b 360K 驱动器格式是1.44Mb、12Mb、720kb、360k b的一种DIS K BOO T FAI LURE, INSE RT SY STEMDISKAND P RESSENTER磁盘引导失败,插入系统盘后按任意键继续三、MBR主引导区提示信息提示信息说明In valid part ition tabl e 无效的分区表Erro r loa dingopera tingsy st em 不能装入引导系统M issin g ope ratin g sys tem 系统引导文件丢失说明:如果在计算机启动过程中,在硬件配置清单下方(也就时在平时正常启动时出现Start ing W indow s 98…的地方)出现不可识别字符,此时可判断硬盘分区表损坏。
Software protection and simulation on Oblivious RAMs

: : : : : : : :
: : : : : : : :
: : : : : : : :
: : : : : : : :
: : : : : : : :
: : : : : : : :
: : : : : : : :
: : : : : : : :
: : : : : : : :
: : : : : : : :
8 8 11 12 12 13 15 15 16 17
8
3 Reducing Software Protection to Oblivious Simulation of RAMs 4 Towards Oblivious Simulation: The \Square Root" Solution 5 The Hierarchical Solution
5.1 5.2 5.3 5.4 5.5 5.6 5.7 5.8
3.1 Software Protection Against Non-Tampering Adversaries : : : : : : : : : : : : : : : : 18 3.2 Software Protection Against Tampering Adversaries : : : : : : : : : : : : : : : : : : 19
: : : : : : : :
24
24 25 27 30 32 35 36 37
6 A Lower Bound 7 Concluding Remarks
Software Protection and Simulation on Oblivious RAMs
Oded Goldreichy Rafail Ostrovskyz
西门子电力传输与分布设备 Input Output Expander (IOEX) 卡说明书
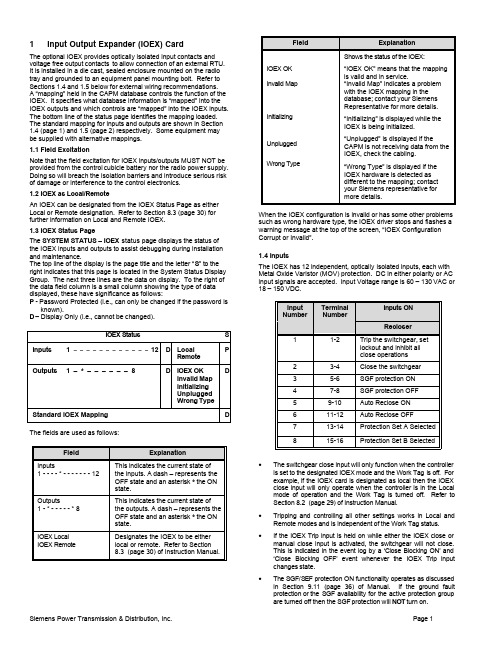
1 Input Output Expander (IOEX) CardThe optional IOEX provides optically isolated input contacts and voltage free output contacts to allow connection of an external RTU. It is installed in a die cast, sealed enclosure mounted on the radio tray and grounded to an equipment panel mounting bolt. Refer to Sections 1.4 and 1.5 below for external wiring recommendations.A “mapping” held in the CAPM database controls the function of the IOEX. It specifies what database information is “mapped” into the IOEX outputs and which controls are “mapped” into the IOEX inputs. The bottom line of the status page identifies the mapping loaded. The standard mapping for inputs and outputs are shown in Section 1.4 (page 1) and 1.5 (page 2) respectively. Some equipment may be supplied with alternative mappings.1.1 Field ExcitationNote that the field excitation for IOEX inputs/outputs MUST NOT be provided from the control cubicle battery nor the radio power supply. Doing so will breach the isolation barriers and introduce serious risk of damage or interference to the control electronics.1.2 IOEX as Local/RemoteAn IOEX can be designated from the IOEX Status Page as either Local or Remote designation. Refer to Section 8.3 (page 30) for further information on Local and Remote IOEX.1.3 IOEX Status PageThe SYSTEM STATUS – IOEX status page displays the status of the IOEX inputs and outputs to assist debugging during installation and maintenance.The top line of the display is the page title and the letter “S” to the right indicates that this page is located in the System Status Display Group. The next three lines are the data on display. To the right of the data field column is a small column showing the type of data displayed, these have significance as follows:P - Password Protected (i.e., can only be changed if the password is known).D – Display Only (i.e., cannot be changed).IOEX Status S Inputs 1 – – – – – – – – – – – – 12D LocalRemotePOutputs 1 – * – – – – – – 8D IOEX OKInvalid MapInitializingUnpluggedWrong TypeDStandard IOEX Mapping D The fields are used as follows:Field ExplanationInputs1 - - - - * - - - - - - - 12This indicates the current state of the inputs. A dash – represents the OFF state and an asterisk * the ON state.Outputs1 - * - - - - - * 8This indicates the current state of the outputs. A dash – represents the OFF state and an asterisk * the ON state.IOEX Local IOEX Remote Designates the IOEX to be eitherlocal or remote. Refer to Section8.3 (page 30) of Instruction Manual.Field ExplanationIOEX OKInvalid MapInitializingUnpluggedWrong TypeShows the status of the IOEX:“IOEX OK” means that the mappingis valid and in service.“Invalid Map” indicates a problemwith the IOEX mapping in thedatabase; contact your SiemensRepresentative for more details.“Initializing” is displayed while theIOEX is being initialized.“Unplugged” is displayed if theCAPM is not receiving data from theIOEX, check the cabling.“Wrong Type” is displayed if theIOEX hardware is detected asdifferent to the mapping; contactyour Siemens representative formore details.When the IOEX configuration is invalid or has some other problemssuch as wrong hardware type, the IOEX driver stops and flashes awarning message at the top of the screen, “IOEX ConfigurationCorrupt or Invalid”.1.4 InputsThe IOEX has 12 independent, optically isolated inputs, each withMetal Oxide Varistor (MOV) protection. DC in either polarity or ACinput signals are accepted. Input Voltage range is 60 – 130 VAC or18 – 150 VDC.InputNumberInputs ONTerminalNumberRecloser11-2Trip the switchgear, setlockout and inhibit allclose operations23-4Close the switchgear35-6SGF protection ON47-8SGF protection OFF59-10Auto Reclose ON611-12Auto Reclose OFF713-14Protection Set A Selected815-16Protection Set B Selected•The switchgear close input will only function when the controlleris set to the designated IOEX mode and the Work Tag is off. Forexample, if the IOEX card is designated as local then the IOEXclose input will only operate when the controller is in the Localmode of operation and the Work Tag is turned off. Refer toSection 8.2 (page 29) of Instruction Manual.•Tripping and controlling all other settings works in Local andRemote modes and is independent of the Work Tag status.•If the IOEX Trip input is held on while either the IOEX close ormanual close input is activated, the switchgear will not close.This is indicated in the event log by a ‘Close Blocking ON’ and‘Close Blocking OFF’ event whenever the IOEX Trip inputchanges state.•The SGF/SEF protection ON functionality operates as discussedin Section 9.11 (page 36) of Manual. If the ground faultprotection or the SGF availability for the active protection groupare turned off then the SGF protection will NOT turn on.•If both SGF protection ON and OFF inputs are on, the default is SGF protection ON •If both Auto Reclose ON and OFF inputs are on, the default is Auto Reclose ON.1.5 OutputsThe IOEX has 8 independent voltage free relay contact outputs, each with MOV protection. The contacts are rated for 150 VAC, 2A or 150 VDC, 1A non-inductive.Output Number TerminalNumberOutput On(relay closed)Output Off(relay open)125-26Tripped Closed227-28Closed Tripped329-30Flag A,OvercurrentProtection Tripindication. Seetable below.431-32Lockout Not in lockout533-34SGF protectionON SGF protection OFF635-36Auto RecloseON Auto Reclose OFF737-38Flag B,OvercurrentProtection Tripindication. Seetable below.839-40SystemHealthy (referto Section13.2.3, page50)Other conditionsTrip Source Flag A,TripIndication Flag B, Trip IndicationReset, Set to this stateon Recloser Close.Off OffPhase Trip On OnGround Trip Off OnSGF Trip On OffNote: The Trip Indicator outputs do not show other causes of a trip such as Loss of Phase.The IOEX contacts are not guaranteed to change duringfast Auto Reclose sequences but will indicate the finalsteady state condition within 300ms.1.6 System Healthy IndicatorThe IOEX System Healthy indicator is present when all of the following are true:•Aux Supply OK;•Battery Supply OK;•SCEM Data Valid;•CAPM Electronics OK;•Contact Life greater than 20% on all phases;•IOEX to CAPM communications OK; and•Mechanism OK.Failure of any of these will cause the System Healthy flag to be extinguished.1.7 Power ConsumptionIf an IOEX card is fitted to the control cubicle, the battery holdup time can be affected. This is due to the current drawn by the IOEX card and its relay coils. An IOEX card draws 10mA without any relays turned on. The relays draw approximately 20mA each for an IOEX Rev 1 and 10mA each for an IOEX Rev 2. There can be up to four relays energized at once with at least one relay energized at all times.Therefore an IOEX Rev 1 draws a minimum of 30mA and a maximum of 90mA while an IOEX Rev 2 will draw a minimum of20mA and maximum of 50mA. Battery holdup time rating is based on a recloser installation without the IOEX card installed.。
general sw error翻译

general sw error翻译general sw error的翻译是"一般性软件错误"。
下面是一些与软件错误相关的常用用法和中英文对照例句:1. Software bug - 软件缺陷Example: The developers are working hard to fix the software bug before the release date. (开发人员正在努力修复软件缺陷,以便在发布日期之前解决问题。
)2. System crash - 系统崩溃Example: The system crash occurred due to a memory leak in the software. (系统崩溃是由于软件中存在内存泄漏问题导致的。
)3. Error message - 错误信息Example: The error message displayed on the screen indicated a problem with the database connection. (屏幕上显示的错误信息提示了与数据库连接有关的问题。
)4. Debugging - 调试Example: The programmers spent several hours debugging the code to identify and fix the software error. (程序员花了几个小时来调试代码,以识别和修复软件错误。
)5. Crash dump - 崩溃转储Example: The crash dump analysis revealed a memory overflow issue that caused the software to crash. (崩溃转储分析揭示了一个导致软件崩溃的内存溢出问题。
)6. Patch - 补丁Example: The software company released a patch to address the security vulnerability reported by users. (软件公司发布了一个补丁,以解决用户报告的安全漏洞。
PC Troubleshooting Checklist.doc
PC Troubleshooting ChecklistProvided by HPA basic troubleshooting sequence checks four things in a fixed order: hardware, BIOS, operating system, and applications. Perhaps you already know what all of these items are, but just in case, let's review them.The physical parts of the computer are known as hardware. Hardware includes the monitor, the system case, the motherboard, the keyboard, the mouse, and so on. Any part that you can touch and see is a hardware component.Hardware is just a heap of metal, plastic, silicon chips, and electrical circuits. It doesn't know how it should behave. For that instruction, it turns to software, which is the programming code. Software is stored on a disk (such as a hard disk, floppy, or CD) until it's needed, and then it's loaded into memory and executed.Perhaps you see the catch-22 situation here: the software must run from memory, but memory is hardware and can't do anything until software commands it. This problem is circumvented by a special category of software called firmware.Firmware is software that's permanently stored on a hardware chip. Its name comes from the fact that it's not exactly hardware and not exactly software -- it's something in-between the two. When the computer starts, a firmware chip called the BIOS is accessed. Its low-level startup instructions are read into memory and processed, making it possible for the operating system to load.There are two levels of software: the operating system and the applications. Windows is the operating system on the vast majority of computers; other operating systems include the Mac OS, Linux, UNIX, and MS-DOS. The operating system is in charge of the user interface -- that is, accepting and processing human commands -- and also talking to the hardware.An application runs over the top of the operating system, and allows the user to do something useful such as write a letter or calculate a budget.Where's the problem?So, what's the problem with your PC? The first step is to determine in which of the four aforementioned areas the problem falls.It may be a hardware problem if the following situations exist:∙The device does not seem to be getting power.∙The device is making a strange noise, such as grinding or whirring.∙The PC sounds like it's starting up but there's no text on the screen.∙The BIOS and operating system do not see the device, even though you've run the device's Setup utility or installed its driver.∙One or more fans on the computer that used to spin are no longer spinning.∙The PC runs fine for a few minutes but then locks up or shuts down after it gets warmed up.It may be a BIOS problem if the following situations exist:∙Someone has recently made a change to a setting in the BIOS Setup program.∙The hardware device you want to use is set to Disabled in BIOS Setup.∙You find information about a known problem with your PC that can be corrected by installing a BIOS update.It may be a Windows system problem if the following situations exist:∙The PC seems to start up okay, with text on the screen, until it tries to load the Windows desktop.∙Error messages appear when you first start Windows.∙Error messages appear that are not associated with any particular application.∙Windows locks up for seemingly no reason, and it doesn't matter which application you're using.∙ A certain device will not work in Windows even though it appears to have power. It may be an application problem if the following situations exist:∙The problem occurs only when you try to run a certain application.∙An application terminates unexpectedly, either with or without an error message.∙The computer locks up when you're using a certain application.Real-life PC problems can be messy and complicated, and can involve more than one component, but the preceding checklist can give you a place to start when you're PC is having trouble.© 2007 Hewlett-Packard Development Company, LPThe HP Small Business Connection brings together products, services, and solutions designed with your business in mind.。
mtbfs
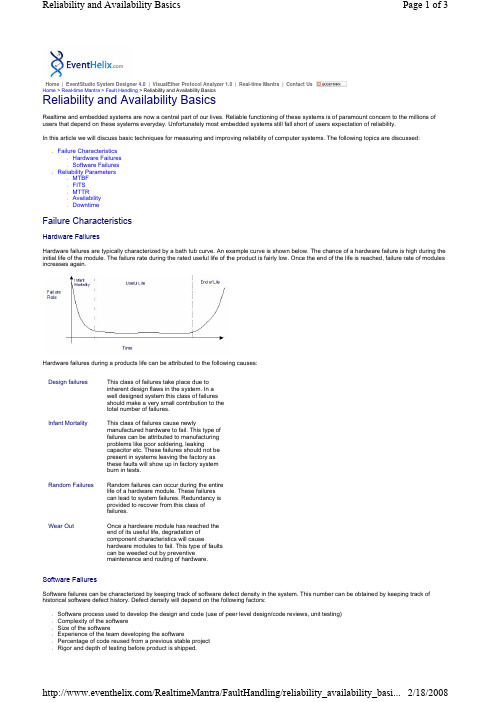
Home | EventStudio System Designer 4.0 | VisualEther Protocol Analyzer 1.0 | Real-time Mantra | ContactUsHome >Real-time Mantra >Fault Handling >Reliability and Availability BasicsReliability and Availability BasicsRealtime and embedded systems are now a central part of our lives.Reliable functioning of these systems is of paramount concern to the millions of users that depend on these systems everyday.Unfortunately most embedded systems still fall short of users expectation of reliability.In this article we will discuss basic techniques for measuring and improving reliability of computer systems.The following topics are discussed:lFailure Characteristics ¡Hardware Failures ¡Software Failures l Reliability Parameters¡MTBF¡FITS¡MTTR¡Availability¡DowntimeFailure CharacteristicsHardware FailuresHardware failures are typically characterized by a bath tub curve.An example curve is shown below.The chance of a hardware failure is high during the initial life of the module.The failure rate during the rated useful life of the product is fairly low.Once the end of the life is reached,failure rate of modules increases again.Hardware failures during a products life can be attributed to the following causes:Software FailuresSoftware failures can be characterized by keeping track of software defect density in the system.This number can be obtained by keeping track of historical software defect history.Defect density will depend on the following factors:lSoftware process used to develop the design and code (use of peer level design/code reviews,unit testing)lComplexity of the software lSize of the software lExperience of the team developing the software lPercentage of code reused from a previous stable project l Rigor and depth of testing before product isshipped.Design failures This class of failures take place due toinherent design flaws in the system.In awell designed system this class of failuresshould make a very small contribution to thetotal number of failures.Infant Mortality This class of failures cause newlymanufactured hardware to fail.This type offailures can be attributed to manufacturingproblems like poor soldering,leakingcapacitor etc.These failures should not bepresent in systems leaving the factory asthese faults will show up in factory systemburn in tests.Random Failures Random failures can occur during the entirelife of a hardware module.These failurescan lead to system failures.Redundancy isprovided to recover from this class offailures.Wear OutOnce a hardware module has reached theend of its useful life,degradation ofcomponent characteristics will causehardware modules to fail.This type of faultscan be weeded out by preventivemaintenance and routing of hardware.Defect density is typically measured in number of defects per thousand lines of code (defects/KLOC).Reliability ParametersMTBFMean Time Between Failures (MTBF),as the name suggests,is the average time between failure of hardware modules.It is the average time a manufacturer estimates before a failure occurs in a hardware module.MTBF for hardware modules can be obtained from the vendor for off-the-shelf hardware modules.MTBF for inhouse developed hardware modules is calculated by the hardware team developing the board.MTBF for software can be determined by simply multiplying the defect rate with KLOCs executed per second.FITSFITS is a more intuitive way of representing MTBF.FITS is nothing but the total number of failures of the module in a billion hours (i.e.1000,000,000hours).MTTRMean Time To Repair (MTTR),is the time taken to repair a failed hardware module.In an operational system,repair generally means replacing the hardware module.Thus hardware MTTR could be viewed as mean time to replace a failed hardware module.It should be a goal of system designers to allow for a high MTTR value and still achieve the system reliability goals.You can see from the table below that a low MTTR requirement means high operational cost for the system.MTTR for a software module can be computed as the time taken to reboot after a software fault is detected.Thus software MTTR could be viewed as the mean time to reboot after a software fault has been detected.The goal of system designers should be to keep the software MTTR as low as possible.MTTR for software depends on several factors:lSoftware fault tolerance techniques used lOS selected (does the OS allow independent application reboot?)l Code image downloading techniquesAvailability Estimating the Hardware MTTRWhere are hardware spares kept?How is site manned? Estimated MTTR Onsite 24hours a day30minutes Onsite Operator is on call 24hours aday2hours Onsite Regular working hours on weekdays as well as weekends andholidays14hours Onsite Regular working hours on weekdays only3days Offsite.Shipped by courier when fault condition isencountered.Operator paged by system whena fault is detected.1week Offsite.Maintained in an operator controlled warehouse System is remotely located.Operator needs to be flown in toreplace the hardware.2week Estimating Software MTTRSoftware fault recovery mechanism Software reboot mechanism on fault detectionEstimate MTTR Software failure is detected by watchdog and/or health messages Processor automatically reboots from a ROMresident image.30secondsSoftware failure is detected by watchdog and/or health messages Processor automatically restarts the offendingtasks,without needing anoperating system reboot30secondsSoftware failure is detected by watchdog and/or health messages Processor automatically reboots and the operatingsystem reboots from diskimage and restartsapplications3minutesSoftware failure is detected by watchdog and/or health messages Processor automatically reboots and the operatingsystem and applicationimages have to bedownload from anothermachine10minutesSoftware failure detection is not supported.Manually operator reboot is required.30minutes to 2weeks(softwareMTTR is sameas hardwareMTTR)Availability of the module is the percentage of time when system is operational.Availability of a hardware/software module can be obtained by the formula given below.Availability is typically specified in nines notation.For example 3-nines availability corresponds to 99.9%availability.A 5-nines availability corresponds to 99.999%availability.DowntimeDowntime per year is a more intuitive way of understanding the availability.The table below compares the availability and the correspondingdowntime.AvailabilityDowntime 90%(1-nine)36.5days/year 99%(2-nines)3.65days/year 99.9%(3-nines)8.76hours/year 99.99%(4-nines)52minutes/year 99.999%(5-nines)5minutes/year 99.9999%(6-nines)31seconds/year !Home | EventStudio System Designer 4.0 | VisualEther Protocol Analyzer 1.0 | Real-time Mantra | Contact Us Copyright © Inc.All Rights Reserved.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Proceedings of theInternational Conference on Parallel Processing,St.Charles,Illinois,pp.117-120,August1987.A SOFTWARE-BASED HARDWARE FAULT TOLERANCE SCHEME FOR MULTICOMPUTERSYuval Tamir and Eli GafniComputer Science DepartmentUniversity of CaliforniaLos Angeles,California90024Abstract—A hardware fault tolerance scheme for large multicomputers executing time-consuming non-interactive applications is described.Error detection and recovery are done mostly by software with little hardware support.The scheme is based on simultaneous execution of identical copies of the application on two subnetworks of the system.Normal system operation is periodically suspended and the logical states of the two subnetworks are synchronized.Errors are detected by comparing the‘‘frozen’’synchronized states of the two subnetworks while they are being saved as‘‘checkpoints’’for possible subsequent use for error recovery.Algorithms for error detection and recovery using this scheme are discussed.I.IntroductionDue to advances in VLSI technology it is now feasible to implement computer systems consisting of thousands of processors. Such systems can achieve high performance by exploiting parallelism. They also have the potential of achieving higher reliability than large monolithic systems since the individual processors are sufficiently powerful and independent so that they may cross-check each other and, if some system components fail,the others can modify their operation to adapt to this change and maintain correct system functionality[8].One possible organization of systems consisting of a large number of processors is a network of computation nodes interconnected by high-speed dedicated communication links[5,6].Each node is a complete‘‘computer’’consisting of a processor,memory,and several communication ports.This type of system(henceforth called a multicomputer)has the advantage that there is no single component, such as a common bus or shared memory,whose correct operation is critical for the entire system.Multicomputers can be used for large noninteractive applications,such as circuit simulation,weather forecasting,etc.A system composed of tens of thousands of VLSI chips has a mean time between component failure of,at most,a few hours[9].Thus,one or more component failures are likely to occur during a computation that takes several hours to complete.Unless that system is able to detect errors and prevent failed components from participating in the computation,the results are likely to be incorrect.Hence, multicomputers used for noninteractive applications must be fault tolerant.In systems used for non-interactive applications the major requirements are a high probability that the results produced are correct and high throughput.Unlike real-time systems,there are no strict constraints on the delays introduced when error recovery is necessary. This‘‘flexibility’’can be exploited by fault tolerance schemes which involve lower average overhead but are subject to more severe temporary service interruptions when errors occur.Fault tolerance requires the ability to detect errors and identify the faulty components.Ideally errors should be detected as soon as they occur and before erroneous information spreads throughout the system[8,9].This can be achieved if error detection is performed by hardware.Specifically,each node should be self-checking,i.e.,its implementation should guarantee that it will produce an error indication to the rest of the system if the results it produces are incorrect due to This work is supported by TRW Corporation and the State of California MICRO program.The second author is supported by NSF grant DCR-84-51396and IBM grant D840622.hardware faults[8,10].Based on the use of self-checking nodes,Tamir and S´equin[9] developed a low overhead fault tolerance scheme that takes advantage of the‘‘flexibility’’of non-interactive applications.The basic idea is to periodically checkpoint the state of the entire system and roll back to a previous checkpoint if an error is detected.The frequency of checkpointing is low(e.g.twice per hour)so the‘‘cost’’of recovering from errors is relatively high.It is estimated that the total overheard for fault tolerance and for dealing with faults in a multicomputer with one thousand nodes will be only a few percent[9].The main disadvantage of the scheme proposed in[9]is that it relies on self-checking nodes.In this paper we examine the possibility of implementing fault tolerance in a multicomputer without the use of self-checking hardware in all the nodes.We present a software-based error-detection scheme which is coupled with an error recovery mechanism similar to the one proposed in[9].The proposed scheme is based on partitioning the system into two identical subsystems. Identical copies of each task are executed on the two subsystems.Errors are detected by comparing the states of the entire subsystems during checkpointing.The rest of the paper includes a discussion of the basic ideas in the proposed scheme,including identification of some key problems and their solutions.Some of the major advantages and disadvantages of the scheme are presented.An outline of the protocols used for the error detection and recovery phases of the scheme are shown.Due to lack of space,many issues cannot be fully discussed and explained.Since some of the ideas are closely related to those presented in[9],familiarity with that paper is assumed.II.Software-Based Error Detection in MulticomputersAs mentioned earlier,one of the primary goals of this work was to find a way to perform error detection with very high coverage without relying on all the hardware to be self-checking.Given the complexity of the hardware and the difficulties in predicting all possible system behavior under faults,duplication and comparison is needed for error detection.In the hardware-based approach[8,9]the duplication and comparison is accomplished by constructing each node using two modules that perform the same operations synchronously and a comparator for comparing their results.With software,duplication and comparison implies that each process is executed on two identical nodes and the results are somehow compared.One possible approach is to allocate each process to two nodes and,when a message is received by a node in the system,the receiving node waits for the corresponding message from the sender’s ‘‘twin’’and compares the two messages to verify their correctness.This scheme involves significant overhead during normal system operation and major complication in task allocation and message routing[11].An alternative software-based error detection scheme involves (logically)partitioning the multicomputer into two identical multicomputers and executing identical copies of all system tasks on the two subsystems.Instead of each node performing a comparison each time a message and its duplicate are received,the states of the entire subnetworks are periodically compared.Fault tolerance requires the ability to recover from errors as well as detect them.Since the error recovery scheme proposed in[9]involves periodic saving of the entire system state,it is beneficial to combine the periodic state comparison with the state saving.-2-In order to detect errors by comparing system states,we must ensure that when the system is operating correctly the states of the two subsystems will,in fact,be identical.We are interested in multicomputers where the nodes are asynchronous.Thus,even though we have two identical systems executing identical tasks,there is no instant in time in which we can stop both systems and be guaranteed that their states will be identical.In order to synchronize system states,we need some measure of the logical progress made by the node in executing its processes.One such measure is a counter of machine instructions that are executed for each process on the node.Thus,our scheme requires that part of the process state will be a register with such a count.We call this counter the process clock.For each node the vector consisting of the process clocks for all processes on the node defines the logical‘‘progress’’made by the node.The hardware and the operating system must allow us to specify that a particular process should execute until its clock reaches a specified value.With the proposed scheme checkpointing is periodically initiated in the two subsystems.As part of the checkpointing process,the states of the two subsystems are‘‘frozen.’’The entire states of the two subnetworks are then‘‘synchronized’’so that they can be compared. This is done by each node exchanging its vector of process clocks with that of its‘‘twin’’in the other subsystem.Each node then executes those processes that are behind until the process clock vectors match.Once the subsystem states are synchronized(see below),the states of the two subsystems must be compared.The system state includes the entire contents of the memories of all the nodes.Thus,a simple comparison of subsystem states would involve too much overhead(the time to transmit the states and then to perform the actual comparison).However,as part of the checkpointing process,the entire system state is saved on disk[9].Thus the entire state must pass through a small number of disk nodes[9].Instead of comparing the subsystem states,signatures of these states will be compared.The signature of the state of each node can be calculated by adding a linear feedback shift register(LFSR)to each disk node[4].The LFSR accumulates the signature of the state while it is being transmitted to the disk controller with negligible overhead.After the node states are saved on disk,a cumulative signature for all the node states saved by that disk node can be paring the subsystem states is now reduced to comparing the signatures calculated in the disk nodes of the two subsystem.Since signatures of,say,128bits,can provide extremely low probability that different states will lead to identical signatures[1], the cost of comparison is now small.Matching the process clock vectors is not sufficient to ensure that the subsystem states are identical.Two other factors must be dealt with:(1)The order in which messages are received and processed by a node can affect its state.(2)Messages in transit between nodes when the subsystem states are frozen(and synchronized)can be‘‘stuck’’in different nodes in the two subsystems,leading to different subsystem states.The first problem can be solved by forbidding applications from using non-blocking receive.The non-blocking receive is inherently non-deterministic and is thus incompatible with our scheme.While we have not analyzed the cost of preventing non-blocking receive in realistic benchmarks,analysis of some simple situation indicate that in an extreme worst case,the cost may be as high as a factor of two slow down.We expect the cost in real programs to be much lower.The solution to the second problem discussed above,is to ‘‘flush’’messages in transit to their final destination before saving and comparing the subsystem states.This is a classic distributed termination problem and the solution we use in the next section is derived from[7].In the error detection scheme discussed above we do not deal with the issue of locating the faulty component(s).In fact,for this entire discussion we will assume that all faults are transient.This is a reasonable simplifying assumption since transient faults are at least an order of magnitude more likely to occur than permanent faults[2]. Extension to this scheme that include fault location appear to be quite possible and will be the subject of future work.Even if we restrict ourselves to dealing with transient faults,we must still be able to handle the problem that can occur when a transient fault causes a node to change its internal state so(e.g.corrupt part of the operating system)that it will no longer participate correctly in system operation.When self-checking hardware is used,implementing nodes which are self-resetting and can reestablish a‘‘sane state’’following a transient fault,is relatively easy[8].While we are not able to discuss details of the solution here,a watchdog timer[3]can be used to periodically ensure that the node is still in a‘‘sane state.’’Another potential problem with this scheme is that nodes can send‘‘misleading’’information that will impede checkpointing or recovery.For example,during the process of synchronizing the two subsystems,incorrect process clock values may be exchanged.This can result in deadlock.Our solution to this problem is for the checkpointing coordinator to impose a loose time limit on the checkpointing session. If checkpointing is not complete by a certain time limit,a fault is declared and recovery is initiated.Finally,as in[9],the problem of failure of disk nodes is difficult to solve.Specifically,since a disk node‘‘handles’’the state of other nodes,it has an opportunity to corrupt them.For this paper we will assume that disk nodes do not fail.In a realy system,we would have to implement the disk nodes as self-checking nodes and use duplicate(mirrored)disks,as discussed in[9].III.Details of the Proposed Fault Tolerance SchemeIn this section we present some details of the proposed fault tolerance scheme.Due to lack of space,not all issue are dealt with and the algorithm specifications are incomplete.The purpose of this section is to present some examples of the type of protocols that need to be used rather than attempt to present complete solutions.Thus,only parts of the checkpointing process is described and the recovery process,which is very similar to the one describe in[9],is not presented.As in[9]we assume that the system uses two basic types of packets:normal packets and fail-safe packets.Normal packets are used for normal computation and carry no redundant information for error detection.During normal processing there is no acknowledgement of normal packets.Fail-safe packets include error detection bit using a code such CRC.The coordination of checkpointing and recovery is all done using fail-safe packets.Fail-safe packets are always acknowledged.The‘‘checkpointing-coordinator’’is selected as in[9]except that there is one checkpointing coordinator for each subsystem and one of these is the‘‘master checkpointing coordinator’’that initiates the checkpointing process for the entire system.We also distinguish between a regular node and a disk node.A disk node is connected to a disk drive and is used to save the states of several regular nodes on disk.A.Types of Fail-Safe PacketsAny two nodes i and j are neighbors if,and only if,there is a link between them.Two nodes i and j are twins if,and only if,they are in different subsystems and are both assigned identical tasks.In the entire system each node has exactly one twin.For every pair of neighbor nodes,i and j,CKV(i,j)is the correct CRC check vector of all the normal packets sent by i to j since the last checkpoint.At any point in time CKV i(i,j)is the value of CKV(i,j)generated and stored in the LFSR in node i.CKV j(i,j)is the value of CKV(i,j)generated and stored in the LFSR in node j.There are fifteen types of fail-safe packets:freeze:Suspend normal processes.synch(src,dest):Transmit the process clock vector from one node to its twin.synch-done(node,coord):Inform the subsystem’s checkpointing coordinator that process clock synchronization is complete.flush:Signal the neighbors to begin‘‘flushing’’any packets in transit by forwarding them to the appropriate destination.flush-ack(child-flag):Node i sends this packet to neighbor j to acknowledge the flush packet previously sent from j to i and to inform j whether i is now a child of j in the flushing spanning tree.normal-ack:Acknowledge normal packets while in the flushing l-state. flushed:Inform the parent in the flushing spanning tree that the sender and the subtree below it are flushed.checkp(CKV):Initiate the saving of a new checkpoint.When sent by some node i to its neighbor node j it contains CKV i(i,j).state(dest,node,seq,size):Used to transmit the state of node node to node dest using fixed length packets.check-sig(src,dest,sig):Used by a disk node src to inform its twin dest of the signature sig for all the node states that it has saved.match-ok(src,coord):Disk node src informs the subsystem’s checkpointing coordinator coord that the state that it saved matched the state saved by its twin.resume:Signals the end of a checkpointing‘‘session’’or the end of a recovery session.fault:Broadcasts the fact that a fault has occurred and initiates recovery. In most cases the originator of this packet is a disk node that has discovered a mismatch in signature with its twin.recover(version):Used to let the disk nodes know which version of the node states stored on their disks they should recover.Version may be0 or1.restored(coord,node):Used by the node node to inform the current checkpointing coordinator that node has received its complete state(as part of the recovery process)and is ready to resume normal operation. B.The Logical States of a NodeAt any point in time,a node in the system may be engaged in normal operation,freezing processing of application processes, synchronizing it process clocks with those of its twin,flushing messages in transit,checkpointing,or error recovery.The node’s response to various packet types depends on its current activity.Hence,we can define several logical-states(henceforth l-states)that are simply labels for the current activity of the node:normal:Normal operation.Normal packets are accepted and processed.A freeze packet causes an l-state transition to frozen.A resume packet is ignored.Other fail-safe packets cause transition to the error l-state. frozen:The l-state of the node after it has received the first freeze packet.Processing of application processes is suspended.Normal packets continue to be received and forwarded.synching:The l-state of the node while it is catching up its process clocks with those of its twin.There is selective processing of application processes.Normal packets are received and forwarded.The l-state changes to synched when the catching up is complete. synched:The node is waiting for all the other nodes in the subsystem to catch up with their twins.Normal packets are received and forwarded. Fail-safe packets of type synch and synch−done are forwarded. flushing:The node is receiving and forwarding normal packets so that all messages in transit will be delivered to their final destination.One of the neighbors is known to be the parent in the flushing spanning tree. Normal packets from all neighbors are acknowledged.Neighbors must acknowledge all normal packets.Processing of application processes is suspended.When flushed packets are received from all the neighbors except the parent,the l-state is changed to flushed.flushed:Node i is in this l-state when i,and all the nodes in the subtree rooted in i are free of messages in transit.If a normal packet is received,the l-state changes back to flushing and the sender of the packet becomes the parent.A checkp packet causes transition to the checkpointing l-state.Other fail-safe packets cause transition to the error l-state.checkpointing:The node is sending its state to a disk node.Normal packets and any fail-safe packet other then state,check-sig,and match-ok,cause transition to the error l-state.Once the node sends its entire state to a disk node,it changes its l-state to checkpointed. checkpointed:The node has completed sending its state to a disk node but has not received the resume packet.A resume packet causes an l-state transition to normal.error:The node has detected(or has been informed of)an error but it is not ready to accept its recovered state.A disk node enters this l-state if it is in the checkpointed l-state and it discovers that the signature for the node states that it just saved on disk does not match the signature computed by its twin.Other nodes can enter this l-state upon receiving a fault packet,an unexpected normal packet,an invalid or unexpected fail-safe packet,or if a neighbor fails to acknowledge a packet when it should.The recover packet causes transition to the recovering l-state. recovering:The node has received recover packet but it is not ready to resume normal operation with its recovered state.The arrival of the node’s complete state via state packets causes a transition to the recovered l-state.recovered:The node has received its complete recovered state but has not resumed normal operation.The resume packet causes a transition to the normal l-state.Each node includes the‘‘state variable’’version that determines what is the most recent valid version of the node’s state that is stored on disk.This variable may have the values0,1,or unknown.When the system is initialized,the value of version in all the nodes is set to0[9].C.Saving the Global CheckpointsAs in[9],every node has a‘‘timer’’that can interrupt the node periodically.Checkpointing is initiated by the coordinator when it is interrupted by its timer(while in the normal l-state).Checkpointing is also initiated when a task is complete since before the system can commit to the result of a task,it should attempt to detect errors in the results and error detection is performed as part of the checkpointing process.It is,of course,possible for a fault in the designated coordinator to prevent it from initiating checkpointing.The solution to this problem is based on the fact that all the other nodes also have timers[9].Node Actions During a Checkpointing SessionThe master checkpointing coordinator,node m,initiates checkpointing.The checkpointing coordinator for a particular subsystem(one of the two)is node c.The checkpointing session begins when node m is interrupted by its timer.Node m stops all work on application processes.It stops transmitting normal packets whose origin is node m but continues receiving normal packets and forwarding normal packets originating elsewhere.The node’s l-state is changed to frozen.Node m then sends to every neighbor node the freeze packet.The actions of each node j that receives the freeze fail-safe packet are described below.[1]Node j stops all work on application processes.It stops transmitting ‘‘original’’normal packets but continues receiving and forwarding normal packets.The node’s l-state is changed to frozen.[2]Node j sends freeze packets to all its neighbors.Node j sends a synch packet to its twin and then waits for a synch packets from its twin.The node’s l-state is changed to synching.[3]Node j begins‘‘catching up’’with its twin.When all the processes are caught up,the node’s l-state is changed to synched.[4]Node j sends a synch-done packet to the checkpointing coordinator and waits for a flush packet.[5]When a flush packet arrives from neighbor node i,node j changes l-state to flushing and sends a flush-ack(true)packet to node i.From that point on,node j acknowledges every normal packet sent by node i and expects node i to acknowledge every normal packet sent from j to i.Node j sends flush packets to all its other neighbors and,after getting flush-ack back begins to acknowledge every normal packet sent by a neighbor and expects those neighbors to acknowledge every normal packet sent from j to them.If all the flush-ack packets the node receive are flush-ack(false),the node considers itself a leaf node.[6]If node j is a leaf node and contains no messages in transit and has no outstanding unacknowledged messages,it changes its l-state to flushed and sends a flushed packet to its parent.When a node receives a flushed packet from all its children,it becomes a leaf node.When node j is in l-state flushed and receives a normal packet from its neighbor node i,it changes its l-state back to flushing and becomes the child of node i.[7]When the checkpointing coordinator changes l-state to flushed,it immediately changes l-state to checkpointing and send checkp(CKV) packets to all its neighbors.As in[9],when the checkp packets are distributed every pair of nodes exchanges CRC check vectors in order to determine if there were any transmission errors during normal computation.If a mismatch is found,recovery is initiated.[8]After verifying the CRC check vectors,the node begins sending its state to its assigned disk node.[9]The disk node accumulates the signatures for the states of all the nodes it saves.After receiving the states of all the nodes assigned to it, the disk node calculates an overall signature and exchanges signatures with its twin.If the signature matches,the checkpointing coordinator is informed using the match-ok packet.If they do not match,recovery is initiated.IV.Summary and ConclusionsWe have presented a new software-based fault tolerance scheme for multicomputers.The scheme provides a very high probability of detecting errors caused by hardware faults without requiring all the hardware to be self-checking.It should be noticed that there are situations where recovery is possible but this scheme will not be able to recover.However,this is a‘‘fail-safe’’mode.Our main goal is to prevent a situation where incorrect results will be accepted as correct. Such a situation is very unlikely to occur with this scheme.While we have not presented estimates of overhead and performance,such rough estimates,based on the current state of technology,indicate the the total overhead for fault tolerance with this scheme can be expected to be on the order of a few percent.One of the main advantages of this scheme is that it presents an opportunity for a system to operate in both safe and unsafe modes.In the unsafe mode,all the nodes are used for achieving higher performance but there is not error detection.In the safe mode,the scheme described in this paper is used so that half the hardware resources are‘‘wasted’’for error detection.The sensitivity of the results to transient faults is different from one application to another(some applications will converge to the correct results despite an incorrect intermediate result at some point in the computation).Furthermore, depending on how the results of a computation is used,in some cases there is no significant damage if the results are incorrect.Given the fact that different applications have different fault tolerance requirements, the flexibility of scheme presented here is a very attractive and makes this approach worthy of further study and eventual implementation. AcknowledgementsThis work was motivated by discussions with A.Avizienis,M. Ercegovac,ng,D.Rennels,and members of the Suprenum project at GMD-FIRST Berlin.References1. D.K.Bhavsar and R.W.Heckelman,‘‘Self-Testing byPolynomial Division,’’1981International Test Conference Proceedings,Philadelphia,PA,pp.208-216(October1981).2.X.Castillo,S.R.McConnel,and D.P.Siewiorek,‘‘Derivationand Calibration of a Transient Error Reliability Model,’’IEEE Transactions on Computers C-31(7),pp.658-671(July1982). 3.J.R.Connet, E.J.Pasternak,and B.D.Wagner,‘‘SoftwareDefenses in Real-Time Control Systems,’’2nd Fault-Tolerant Computing Symposium,Newton,MA,pp.94-99(June1972).4.S.A.Elkind,‘‘Reliability and Availability Techniques,’’pp.63-181in The Theory and Practice of Reliable System Design,ed.D.P.Siewiorek and R.S.Swarz,Digital Press(1982).5. C.L.Seitz,‘‘The Cosmic Cube,’’Communications of the ACM28(1),pp.22-33(January1985).6. C.H.S´equin and R.M.Fujimoto,‘‘X-Tree and Y-Components,’’pp.299-326in VLSI Architecture,ed. B.Randell and P.C.Treleaven,Prentice Hall,Englewood Cliffs,NJ(1983).7.N.Shavit and N.Francez,‘‘A New Approach to Selection ofLocally Indicative Stability,’’13th ICALP(Lecture Notes in Computer Science226),pp.344-358,Springer-Verlag(1986). 8.Yuval Tamir and Carlo H.S´equin,‘‘Self-Checking VLSIBuilding Blocks for Fault-Tolerant Multicomputers,’’International Conference on Computer Design,Port Chester,NY, pp.561-564(November1983).9.Yuval Tamir and Carlo H.S´equin,‘‘Error Recovery inMulticomputers Using Global Checkpoints,’’13th International Conference on Parallel Processing,Bellaire,MI,pp.32-41 (August1984).10.Yuval Tamir and Carlo H.S´equin,‘‘Reducing Common ModeFailures in Duplicate Modules,’’International Conference on Computer Design,Port Chester,NY,pp.302-307(October1984).11.Yuval Tamir,‘‘Fault Tolerance for VLSI Multicomputers,’’Ph.D.Dissertation,CS Division Report No.UCB/CSD86/256, Department of Electrical Engineering and Computer Sciences, University of California,Berkeley,CA(August1985).。