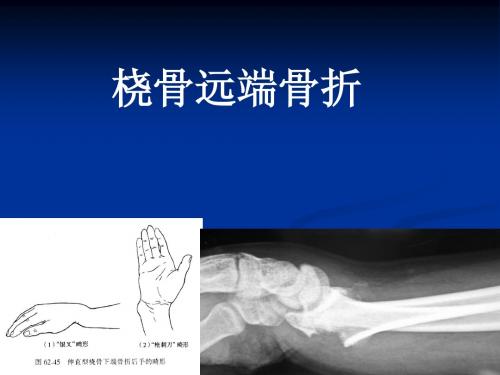
桡骨远端骨折
桡骨远端骨折ppt课件

原因:桡骨 远端骨折导 致关节僵硬 和疼痛
影响:无法 进行正常的 生活活动, 如吃饭、穿 衣、洗澡等
恢复时间: 需要经过一 段时间的康 复治疗才能 逐渐恢复活 动能力
治疗方法: 可以采用保 守治疗或手 术治疗,根 据病情选择 合适的方法
间。 ● 被动运动:在医生指导下进行腕关节和手指的被动运动,以增加关节活动范围和肌肉力量。:等长收缩:进行手指的等长收缩,以
增强肌纤维的力量和耐力。 ● 冷敷和热敷:在锻炼前可采用冷敷以减轻疼痛和肿胀,锻炼后可采用热敷以促进血液循环和组织修复。:康复锻炼注意事项 ● 在锻炼过程中如感到剧烈疼痛或不适,应立即停止锻炼并寻求医生建议。:在康复锻炼过程中,要注意保持骨折部位的稳定,避免
汇报人:XXX
01 02 03 04
定义:桡骨远端骨折是指距桡骨远端关节面3cm以内的骨折
诊断:X线检查是桡骨远端骨折诊断的重要方法,可以了解骨折的具 体情况
直接暴力:如撞击、挤压、火器伤等导致桡骨骨折 间接暴力:如摔倒时手撑地面导致桡骨骨折 疲劳性骨折:长期反复轻度的手外伤累积所致 病理性骨折:如骨病、肿瘤等导致的桡骨骨折
预防措施: 加强锻炼, 提高关节的后,患者会感到明显的腕部疼痛,尤其是在移动或用力时。 肿胀和淤血:骨折可能导致局部肿胀和淤血,影响手部活动。 功能障碍:疼痛和肿胀可能导致手部功能障碍,患者可能无法完成日常手部活动。 长期疼痛和不适:如果桡骨远端骨折未得到适当治疗,可能会导致长期疼痛和不适。
愈合
康复治疗:进 行康复训练, 以促进骨折愈 合和恢复关节
功能
切口:远端切开、近端外侧切开
复位:恢复关节面平整、桡骨长 度及掌倾角
桡骨远端骨折
体格检查
1、体检前应进行疼痛评分或视诊活动受 限的程度。同时应检查两侧上肢以判断 萎缩(晚期表现)、脱位和不对称。应 注意瘀斑、红斑或明显畸形的区域。上 述症状提示应行X光检查的骨折。
2、下桡尺关节(DRUJ)掌面和背面或尺 骨茎突凹处的触诊可能会发现由于 DRUJ急性损伤引起的压痛和肿胀。
3、可以通过对关节施加应力或对侧比较 来判断关节稳定性,并依此鉴别韧带损 伤。
以骨折片作为指导,根据骨折片粉碎和 分离程度将关节内骨折分为5型。
Melone分类系统
Ⅰ型:稳定型骨折不伴有移位。此型特征是 桡骨茎突和掌、背侧月骨关节面骨折。
Ⅱ型:不稳定“强力撞击”伴有特征性骨折 片移位和前、后侧皮质粉碎。Ⅱ A型可复位 ⅡB型不可复位(中央嵌入骨块)。
Ⅲ型:“刺状”骨折。不稳定、关节面及桡 骨近端有尖锐的骨折块移位。
Kapandji技术 :骨折内穿针技术 ,用1到3根直 径为1.6 mm
的克氏针分别通过腕背侧第一、二肌腱室,插 入骨折间隙后, 通过杠杆作用纠正掌倾角、尺偏角畸形,并 将针固定在骨折
端近侧皮质上
Kapandji技术
适应证
年龄<65岁的关 节外骨折
伴有干骺端轻微粉碎的骨折 或无移位的关 节内骨折
生物学功能。
TFCC的解剖特征
TFCC的重要功能
1、作为腕尺侧的一个衬垫,桡骨远 端承担80%的轴向负荷,而尺骨远端 及TFCC 承担20%的轴向负荷。
2、稳定远侧桡尺关节; 3、稳定尺腕关节。
三柱理论
AO分型
• 不涉及关节面
A
• 部分关节面骨折
B
• 完全关节面骨折
C
A
A1:孤立的尺骨远 端骨折
桡骨远端骨折-资料

TFCC的重要功能
1、作为腕尺侧的一个衬垫 , 桡骨远 端承担80%的轴向负荷,而尺骨远端 及TFCC 承担20%的轴向负荷。
2、稳定远侧桡尺关节; 3、稳定尺腕关节。
桡骨远端骨折的分类
1、AO系统分类法: A、关节外骨折:A1、孤立的尺骨远端骨折;A2桡骨远端骨折、无粉碎、
桡骨远端骨折
高新医院骨2科
桡骨远端骨折的定义
桡骨远端骨折是指距桡骨远端关 节面3cm以内的骨折,是临床上 最常见的骨折之一,多见于中老 年骨质疏松的患者。
桡骨远端骨折的发病情况
桡骨远端骨折是人类全身最常见的骨折,其发病 率约占急诊骨折病人的17%;桡骨远端关节内骨折约 占整个前臂骨折的5%,占挠骨远端骨折的25%。
外固定架技术
外固定架技术
腕关节镜指引下切开复位
桡骨远端关节面的双凹构型使手术直视非常困难, 通过腕关节镜可允许在一个明亮、放大的条件下进行关 节面的重建、关节清洗和腕内韧带损伤的诊断和处理; 对桡骨远端关节内骨折进行协助复位及结合内、外固定 治疗。它以更精确、方便的复位,更小的创伤,同时兼 顾软骨及韧带的修复,已成为桡骨远端关节内骨折的一 种非常有价值的辅助治疗手段。如 Cotton骨折可用关 节镜监视骨块抬高的程度,并可用持钩将骨折线拉拢, 再通过植骨固定获得关节面的解剖复位。
腕关节镜指引下切开复位
切开复位内固定术
对于一些极不稳定骨折,如涉及关节面、粉碎性的 骨 折 ,采用非手术治疗容易再移位。切开复位常用的手 术切口有三种:掌侧切口、背侧切 口 、 桡骨茎突切口。 较常用是掌侧切口和背侧切口。
1)、掌侧切开复位钢板内固定:手术入路为经桡侧 腕屈肌入路,沿肌腱方向皮肤切口仅需3-4cm,将旋前 方肌从桡骨的附着处剥离后能很好地暴露桡骨远端骨折 处,复位骨折并放置钢板。剥离旋前方肌时需在桡骨远 端附着处留有 4-5mm边缘以便缝合。Kamano认为掌 侧切开复位钢板内固定治疗Colles’骨折是一种安全有 效、容易操作的手术方法。
桡骨远端骨折ppt课件
添加标题
神经损伤:桡骨远端骨折有时会伴随着神经损伤,如正中神经、桡神经或尺神经的损伤。 这可能会影响您的手部感觉和功能。
桡骨远端骨折的
03
治疗方法
非手术治疗
手法复位: 通过手法将 错位的骨折 端恢复正常 或近乎正常 的解剖关系
石膏固定: 用石膏绷带 将骨折部位 固定,促进 愈合
牵引治疗: 通过牵引力 和反牵引力 作用,使骨 折复位
XXX,a click to unlimited possibilities
桡骨远端骨折ppt课件
汇报人:XXX
CONTENTS
目 录
01 桡骨远端骨折概述
02
桡骨远端骨折的症状和表 现
03 桡骨远端骨折的治疗方法
04 桡骨远端骨折的预防措施
桡骨远端骨折概
01
述
定义和诊断
定义:桡骨远端骨 折是指距桡骨远端 关节面3cm以内的 骨折
诊断:医生根据患 者的病史、体格检 查、影像学检查进 行诊断
常用的影像学检查 包括X线、CT和 MRI
骨折原因
直接暴力:如手掌撑地受伤导致桡骨远端骨折 间接暴力:如肘部或手腕着地受伤导致桡骨远端骨折 疲劳性骨折:长期反复的劳损可能导致桡骨远端骨折 病理性骨折:如骨质疏松症、骨肿瘤等病症可能导致桡骨远端骨折
骨折分类
胫骨平台骨折:腰椎骨 折
螺旋形骨折:粉碎性骨 折
自发性骨折:按照骨折 线的形态分类
青枝骨折:压缩性骨折
稳定骨折
按照骨折部位分类:桡 骨远端骨折
横行骨折:斜行骨折
按照骨折后的稳定性分 类:不稳定骨折
按照骨折原因分类:创 伤性骨折
按照骨折线的方向分类: 裂缝骨折
桡骨远端骨折的
桡骨远端骨折全面解析

桡骨远端骨折的手术治疗方案
• 手术治疗:适用于不稳定型骨折、移位明显骨折和关节内骨折 • 内固定术:钢板、螺钉等内固定材料固定骨折,恢复关节面平 整 • 外固定术:支架、克氏针等外固定材料固定骨折,维持骨折稳 定 • 关节镜手术:关节镜下复位和固定关节内骨折,减少创伤
桡骨远端骨折治疗后的康复与功能锻炼
桡骨远端骨折的危险因素分析
01 年龄:随着年龄增长,骨折风险增加 02 性别:女性发病率高于男性,可能与雌激素水平有关 03 体质:瘦弱者骨折风险较高 04 职业:手部劳动强度大者骨折风险增加 05 既往史:有骨折史者再次骨折风险增加
预防桡骨远端骨折的方法与措施
增强锻炼:提高肌肉力量和 关节活动度,增加骨折抵抗
• 严格按照治疗指南进行治疗 • 密切观察病情,及时发现并发症 • 加强护理,预防感染
处理方法:
• 骨折不愈合:再次手术治疗,如植骨、内固定等 • 骨折畸形愈合:手术矫正畸形,如截骨、矫形等 • 关节僵硬:康复训练、物理治疗等改善关节活动度 • 感染:抗生素治疗、局部清创等控制感染 • 神经损伤:神经营养、神经功能恢复等治疗
桡骨远端骨折的流行病学特点
• 桡骨远端骨折是常见的骨折类型,约占全身骨折的20% • 高发年龄:40-60岁,女性发病率高于男性 • 发病部位:桡骨远端关节面2cm以内
• 骨折原因多样,常见的有跌倒、运动损伤、交通伤等
桡骨远端骨折的临床症状与体征
疼痛:骨折部位疼痛, 活动受限
肿胀:骨 折部位肿 胀,皮肤
DOCS
桡骨远端骨折全面解析
01
桡骨远端骨折的基本概念与概述
桡骨远端骨折的定义 与分类
• 桡骨远端骨折是指桡骨远端关节面2cm以内的骨折 • 伸直型骨折:骨折线通过关节面,骨折远端向背侧移位 • 屈曲型骨折:骨折线通过关节面,骨折远端向掌侧移位 • 嵌插型骨折:骨折块相互嵌插,关节面无移位
桡骨远端骨折的保守治疗
保守治疗与手术治疗的优缺点比较
保守治疗优点
保守治疗不需要手术,因此不会造 成手术创伤和相关风险,如感染、 麻醉意外等。
保守治疗缺点
保守治疗需要长时间固定患肢,可 能导致关节僵硬、肌肉萎缩等并发 症,且恢复时间较长。
手术治疗优点
手术治疗可以早期恢复关节功能, 减少并发症,通常愈合较快。
手术治疗缺点
手术治疗存在手术创伤和相关风险 ,如感染、麻醉意外、内固定失败 等。
物理治疗
物理治疗也可以帮助患者恢复关节活动度和 肌肉力量,促进骨折愈合。物理治疗师会根 据患者的具体情况制定个性化的治疗方案,
包括冷敷和热敷、电刺激、按摩等。
定期检查和调整治疗方案
定期检查
在保守治疗期间,患者需要定期接受检查,以确保骨折 的愈合进展顺利。医生会根据患者的具体情况安排适当 的检查时间和项目,如X光检查、CT扫描等。
患者教育和心理支持了解治疗程向患者详细解释治疗过程、注 意事项和可能出现的并发症, 以增加患者的依从性和信心。
疼痛管理
指导患者如何进行疼痛自我管 理,包括使用药物、物理治疗
等缓解疼痛的方法。
心理疏导
关注患者的心理状态,给予心 理支持和鼓励,帮助患者建立 信心和积极面对疾病的态度。
感谢您的观看
THANKS
药物使用
根据患者的疼痛程度和医生的建议,可能 会需要使用一些药物来缓解疼痛、消炎和 促进骨折愈合。但是,药物的使用应该遵 循医生的指导,并注意观察是否有任何不 良反应。
康复训练和物理治疗
康复训练
在保守治疗期间,康复训练是至关重要的。 这可以帮助患者恢复关节活动度和肌肉力量 ,预防骨折愈合后的僵硬和肌肉萎缩。患者 应该在医生的指导下进行适当的康复训练, 包括被动和主动关节活动、肌肉锻炼等。
桡骨远端骨折的健康宣教
桡骨远端骨折的健康宣教桡骨远端骨折是一种常见的骨折类型,主要发生在手腕关节附近。
对于患者来说,了解如何正确处理和预防这种骨折很重要。
本篇文章旨在提供有关桡骨远端骨折的健康宣教,包括处理方法和预防措施。
一、桡骨远端骨折的处理方法当发生桡骨远端骨折时,正确的处理方法对于患者的康复至关重要。
以下是一些建议:1. 寻求医疗帮助:在遭受桡骨远端骨折后,首先应该尽快就医。
通过医生的专业评估,可以确定骨折的类型和程度,并采取相应的治疗方法。
2. 暂时固定:在等待医生的处理之前,可以采取一些暂时固定的措施。
例如,可以用绷带或者其他合适的材料将手腕支撑固定,以减少疼痛和进一步损伤。
3. 手术治疗:对于一些严重的桡骨远端骨折,可能需要进行手术治疗。
手术可以通过将骨折部位固定在一起来促进愈合。
4. 康复锻炼:骨折恢复后,康复锻炼非常重要。
通过物理治疗和运动疗法,可以加强手腕和前臂的肌肉,并逐渐恢复手部功能。
二、预防桡骨远端骨折的措施除了正确处理骨折之外,预防桡骨远端骨折同样重要。
以下是一些建议,帮助您减少骨折的风险:1. 注意安全:在进行日常活动时,要特别注意安全。
例如,避免走在不平坦的地面上,避免穿着不稳定的鞋子,以减少跌倒和手腕伤害的可能性。
2. 增强骨骼健康:通过饮食和适度的运动来增强骨骼健康。
摄入足够的钙、维生素D和其他必要的营养物质,这些有助于骨骼强度和健康。
3. 避免过度使用:避免长时间过度使用手腕,尤其是在剧烈运动或重复运动时。
适当地休息和放松手部肌肉,可以减少受伤和骨折的风险。
4. 佩戴护具:对于一些高风险的活动,例如滑雪、滑板等,可以考虑佩戴手腕护具。
护具可以提供额外的支撑和保护,减少受伤的可能性。
结语桡骨远端骨折对患者的健康和生活质量造成了一定影响。
通过正确的处理和预防措施,我们可以减少骨折的风险,并促进康复。
无论是遭受骨折还是预防骨折,及时咨询医生并遵循专业建议是至关重要的。
关注手部健康,我们可以更好地保护自己,并享受健康快乐的生活。
桡骨远端骨折
C3型
外固定架治疗桡骨远端骨折 外固定架平面与手背冠状面和矢状面成45 外固定架平面与手背冠状面和矢状面成45 度,远端两针放 在 第二掌骨中部及基底部,经过2~5cm的切口进入,近 第二掌骨中部及基底部,经过2 5cm的切口进入,近 端两针放在距骨折线8 10cm的桡骨干上,经肱桡肌 端两针放在距骨折线8~10cm的桡骨干上,经肱桡肌 与桡 侧腕长伸肌之间进入。
腕关节镜
谢谢!
切复钢板固定的指征 A型骨折手法复位失败者 B型骨折关节面移位明显者 C1、C2型和部分C3型骨折 C1、C2型和部分C3型骨折
切开复位钢板固定 首选掌侧入路,以下情况选择背侧入路:B2型骨折 首选掌侧入路,以下情况选择背侧入路:B2型骨折 、背 侧骨折粉碎、估计复位后有明显的骨质缺损,需要术中背 侧植骨者。 掌侧入路 背侧入路
畸形愈合 表现——影响美观,关节外畸形,关节内畸形。 表现——影响美观,关节外畸形,关节内畸形。 治疗——去除阻挡,恢复骨的正常解剖,挽救性治疗。 治疗——去除阻挡,恢复骨的正常解剖,挽救性治疗。 治疗遵循个体化原则——单纯外观畸形不主张矫正;引起疼痛或 治疗遵循个体化原则——单纯外观畸形不主张矫正;引起疼痛或 功能丧失的畸形需矫正;关节外-改善显著;关节内-挽救功能, 减轻疼痛。 手术方法——截骨固定;确保截骨线与桡骨远端关节面平行。 手术方法——截骨固定;确保截骨线与桡骨远端关节面平行。 不愈合:罕见、采用植骨内固定。 软组织并发症:并不少见,伸、屈肌腱断裂或嵌插。 治疗——修复或重建肌腱。 治疗——修复或重建肌腱。 交感神经反射性营养不良: 是难治并发症,原因不明,一般认为此病于交感神经系统调 是难治并发症,原因不明 一般认为此病于交感神经系统调 节障碍有关,心理因素也会起一定作用。常造成腕和手的软组织 节障碍有关,心理因素也会起一定作用。常造成腕和手的软组织 僵硬,如有怀疑,可做诊断性检查如骨扫描,治疗成功的关键在 于治疗疼痛和消除水肿,。
桡骨远端骨折(ppt)全
复位的最低影像学标准是:背倾角<10°,尺偏角 >l5°,桡骨缩短<5mm,关节面骨折块的台阶或分离 <2mm,桡骨远端乙状切迹和尺骨头基本完好,无腕骨异 常排列。若能满足上述标准,即使后期畸形愈合,也不会 出现明显的临床症状。
复位手法(伸直型)
(1)一助手握住患者前臂上端,医者双手拇 指触于骨远端背侧,其余四指触于腕掌侧行 对抗牵拔,矫正旋转及重迭畸形。
在中老年,女性患者明显多于男性,随着年龄 增加,其发生率逐步上升,低能跌伤远比高能 创伤多,其原因与高龄及女性绝经后的骨质疏 松相关。
桡骨远端骨折
定义
指桡骨下端
3CM
关节面以上2-
3厘米处发生
的骨折。
腕部的解剖:
(1)8块腕骨
(2)2根前臂骨
发病率比较高,老人多见
桡骨远端骨折 全身骨折
占全身骨折的11%
但最常用的是AO/ASIF 和Frykman分型 ※大多数骨折首选的治疗是闭合复位或外固定。
如果骨折无法复位,必须切开复位。
其发病率约占急诊骨折病人的17%,其中关节内 骨折占桡骨远端骨折的25%。
桡骨远端骨折主要发生在青少年和中老年两个 年龄段。
在青少年,男性发病率显著高于女性,与患者 户外活动及骨骼发育有关,主要是高能量损伤 引起;
(1) 闭合复位石膏(夹板)外固定
闭合复位石膏或夹板外固定是大多数桡骨远端骨折的主要治疗 方法。
对于儿童或中老年人发生的低能量损伤、关节外骨折或累及关 节面无移位的患者,闭合复位可取得良好的疗效。
在局部血肿内麻醉或臂丛神经阻滞麻醉下,患者坐位或平卧位 ,持续对抗牵引、左右摇摆、成角反折、提按等手法予以整复,首 先恢复桡骨的高度,其次为掌倾角,再次为尺偏角。骨折手法复位 后,根据骨折类型采用不同的固定体位。Colles骨折固定于掌屈5° ~15°及适度尺偏位;Smith骨折固定于前臂旋后和腕关节背伸位 ,并且石膏过肘;Barton骨折外固定不容易稳定,在不能采用内固 定的情况下,背侧Barton骨折固定于腕关节背伸及前臂旋前位,掌 侧Barton骨折固定于腕关节掌屈及前臂旋后位。
桡骨远端骨折ppt课件

处理措施:一旦明确诊断,应积极采取手术治疗,切开深筋膜减压。
预防措施:密切观察病情变化,早期诊断、早期处理、防止并发症的发 生。
护理
定期换药:保 持伤口干燥、 清洁,避免感
染。
正确饮食:多 吃富含蛋白质、 维生素和矿物 质的食物,如 鱼、肉、蛋、 奶、豆类及新 鲜蔬菜和水果。
非手术治疗
支具固定:使用支具进行固 定,防止骨折移位
药物治疗:使用消炎止痛药 物,缓解疼痛及肿胀
理疗:采用理疗仪,促进局 部血液循环及恢复功能
手法复位:采用专业手法复 位,恢复关节对位关系
功能锻炼:在医生指导下进 行功能锻炼,促进骨折愈合
及功能恢复
手术治疗
● 手术指征:非手术治疗效果不佳,影响生活质量 ● 不稳定骨折,闭合复位不能维持良好对位:关节内骨折,影响关节功能 ● 术前准备:拍摄腕关节正侧位片 ● 测量握力及腕关节活动度:神经血管检查 ● 手术步骤:全身麻醉或臂丛麻醉 ● 体位摆放,暴露手术部位:手法复位,恢复骨折对位对线 ● 内固定,维持骨折稳定性:缝合伤口,加压包扎 ● 术后注意事项:抬高患肢,减轻肿胀 ● 按时换药,保持伤口干燥:术后4-6周进行功能锻炼,恢复关节功能 ● 定期复查,了解骨折愈合情况
诊断:医生需要根据患者的病史、体格检查和影像学检查来进行诊断
常见的影像学检查包括X线、CT和MRI等
骨折原因
直接暴力:如手 掌撑地受伤导致 桡骨远端骨折
间接暴力:如肘 部或手腕着地受 伤导致桡骨远端 骨折
肌肉拉力:如突 然的肌肉收缩导 致桡骨骨折
疲劳性骨折:长 期反复的轻微外 伤导致的桡骨骨 折
桡骨远端骨折应该怎么办潘玉会
桡骨远端骨折应该怎么办潘玉会发布时间:2023-06-08T10:26:40.290Z 来源:《中国结合医学》2023年5期作者:潘玉会[导读]南充市中医医院四川南充 637000桡骨远端骨折是骨科最常见的骨折之一,约占全身骨折的5%。
桡骨远端骨折在临床上比较常见,尤其是在老年人中。
对于老年人来说,由于他们的身体机能退化,所以更容易发生桡骨远端骨折。
当出现桡骨远端骨折时,首先需要判断其是否有移位,如果没有移位则无需进行手术治疗;如果存在明显的移位则需要进行手术治疗。
对于桡骨远端骨折来说,大多数的患者都会选择保守治疗,但是并不是所有的保守治疗都是有效的。
对于桡骨远端骨折患者来说,在进行手术治疗前需要考虑以下几点:一、对骨折的类型进行判断当出现桡骨远端骨折时,除了需要考虑是否为移位型骨折之外,还需要考虑其骨折类型。
在临床上一般将桡骨远端骨折分为三种类型:1、非移位型:这类骨折通常是由于间接暴力导致的,如跌倒时手握东西不慎摔倒、运动时手持重物等。
2、混合型:这类骨折是指同时存在非移位型两种类型,其中非移位型骨折又可以分为完全性骨折和不完全性骨折两种类型。
二、骨折的对位骨折的对位是治疗桡骨远端骨折最关键的因素,如果对位不佳,在固定时会给患者带来巨大的痛苦。
临床上对于桡骨远端骨折患者,通常采用石膏或支具固定,这种固定方法非常简单方便,而且具有很好的固定效果。
但是这种治疗方式会使患者的关节出现废用性萎缩,影响到腕关节的功能恢复。
但是如果采用手术治疗的方法进行治疗,对位不佳的问题就会得到有效解决。
首先需要根据患者骨折的类型选择合适的手术方式,对于非转性骨折和非移位型骨折患者来说,可以选择传统手术治疗;而对于移位型骨折患者来说则可以采用内固定手术治疗。
当患者出现桡骨远端骨折时,患者首先需要进行复位治疗。
如果复位失败,则需要及时进行手术治疗。
对于桡骨远端骨折来说,复位并不是单纯将其复位到桡骨小头位置那么简单,而是要将桡骨小头与尺骨茎突成30°角,使其恢复到正常位置。
桡骨远端骨折护理业务学习

第三部分:常见并发症及预防
关节僵硬:及时进行康复训练、活动患 肢、按摩等有助于预防和治疗关节僵硬 。
谢谢您的观赏 聆听
第二部分不要在医生 未移除夹板之前随意更换等。
第三部分:常见并发症及预 防
第三部分:常见并发症及预防
活动障碍:术后康复训练很重要,可逐 步增加运动时间和运动强度,达到恢复 患肢活动的目的。 感染:手术前后做好个人卫生,保持伤 口清洁,及时更换伤口敷料、按照医生 指导正确使用抗生素等。
桡骨远端骨折护理业务 学习
目录 第一部分:基础知识 第二部分:急救处理 第三部分:常见并发症及预防
第一部分:基础知识
第一部分:基础知识
什么是桡骨远端骨折:桡骨远端骨折是 指桡骨远端的骨折断裂。 诊断方法:通过X线片进行诊断,医生 会根据骨折类型、骨折程度和肢体状况 等因素进行综合判断。
第一部分:基础知识
护理原则:早期减轻疼痛、防止并发症 、个性化康复训练和营养支持等。
第二部分:急救处理
第二部分:急救处理
骨折初期处理:保持患肢静止、使用冰 袋、止痛药等改善疼痛、及时就医等。 如何正确佩戴夹板:由医生根据骨折程 度和类型制作夹板,并指导患者正确佩 戴和更换,患者应该积极配合医生指导 完成佩戴过程。
桡骨远端骨折手术步骤
桡骨远端骨折手术步骤
桡骨远端骨折手术的步骤可能会因医生的偏好和患者的具体情况而有所不同。
以下是一般情况下桡骨远端骨折手术的基本步骤:
1. 术前准备:对患者进行全面的术前评估,包括病史、体检和影像学检查。
确保患者了解手术过程和风险,并签署知情同意书。
2. 麻醉:根据患者情况,选择适当的麻醉方式,如局部麻醉或全身麻醉。
3. 手术暴露:在手腕背部做一个小切口,暴露桡骨远端骨折端。
4. 骨折复位:使用牵引、撬拨等手法,将骨折端复位到正常的位置。
5. 内固定:根据骨折的类型和程度,选择适当的内固定物,如钢板、螺钉或髓内钉。
将内固定物固定在骨折端,以保持骨折的稳定。
6. 检查固定:在固定完成后,检查骨折端的位置和固定的稳定性。
确保骨折端对齐良好,固定牢固。
7. 关闭切口:冲洗切口,逐层缝合,以关闭手术切口。
8. 术后处理:术后对患者进行密切观察,给予适当的止痛和抗感染治疗。
指导患者进行康复锻炼,帮助恢复手腕的功能。
需要注意的是,以上步骤仅为一般指导,具体的手术操作可能因医生的经验和患者的情况而有所不同。
在手术过程中,医生会根据实际情况进行调整和决策。
如果你对具体的手术步骤有更多的疑问,建议咨询专业的骨科医生。
桡骨远端骨折ppt课件

预防措施
保持健康的生活方式
通过均衡饮食、适量运动和避免吸烟等措施,可以增强骨骼强度 ,降低骨折的风险。
定期进行骨密度检测
骨密度是衡量骨骼健康的重要指标,定期进行骨密度检测可以及 时发现并采取措施预防骨折。
避免摔倒和意外伤害
在日常生活中,注意行走、运动等活动的安全,避免摔倒和意外 伤害。
护理方法与注意事项
方法治疗。
03
CATALOGUE
桡骨远端骨折的诊断与评估
诊断标准与方法
诊断标准
明确的外伤史,如跌倒、撞击等,以 及腕关节的疼痛、肿胀、活动受限等 症状,是桡骨远端骨折的常见表现。
诊断方法
通常采用X线检查,可以清楚地显示骨 折的部位和程度。同时,CT、MRI等 影像学检查也可以进一步帮助医生评 估骨折的情况。
手法复位
通过专业手法将骨折部位恢复到正常位置。
石膏固定
使用石膏绷带将骨折部位固定,促进愈合。
牵引治疗
通过牵引装置对骨折部位进行牵拉,帮助复位和 愈合。
手术治疗
切开复位内固定
通过手术切开骨折部位,将骨骼恢复到正常位置,并使用内固定 材料进行固定。
关节融合术
将关节固定在一起,促进愈合,减少疼痛。
截骨术
特点
桡骨远端骨折是常见的关节内骨 折,常伴随关节面破坏,治疗不 当易影响关节功能。
桡骨远端骨折的分类
01
02
03
Colles骨折
桡骨远端关节面横向骨折 ,伴远端向桡、背侧移位 。
Smith骨折
桡骨远端关节面纵向骨折 ,伴远端向掌、桡侧移位 。
Barton骨折
桡骨远端关节面斜形骨折 ,伴腕关节脱位。
07
CATALOGUE
桡骨远端骨折

桡骨远端骨折1.定义桡骨远端骨折是指桡骨下端关节面2~3cm以内的骨折。
桡骨远端骨折主要发生在6~10岁和60 ~75岁两个年龄段,女性多于男性。
2.诊断依据2.1病史有明确外伤史。
2.2症状体征伤后腕部疼痛并迅速肿胀,常波及手背及前臂下1/3,腕关节活动功能部分或完全丧失,手指做握拳动作时疼痛加重,暴力轻时,骨折嵌插而无明显移位,畸形不明显;暴力重,Colles骨折移位严重者,腕掌侧隆起,而其远侧向腕背侧突出,从侧面可见典型“餐叉样”畸形。
移位严重的Smith骨折呈“锅铲样”畸形,骨折远端向掌侧移位。
Barton骨折较少见,属于关节内骨折,伴有掌侧和背侧腕关节半脱位和脱位,骨折端有时可触及移位的骨折块。
2.3影像检查X线检查即可明确骨折的部位和移位情况,并可作为复位的依据。
常规摄腕关节的正侧位X线片可确诊。
典型的Colles骨折移位表现为以下几点:桡骨远端骨折块向背侧移位;桡骨远端骨折块向桡侧移位;骨折处向掌侧成角;桡骨缩短,骨折处背侧骨质嵌入或粉碎骨折;桡骨远端骨折块旋后;正位片示尺偏角小于200,侧位片上示掌倾角小于100。
典型的Smith骨折X线片表现是桡骨远折端连同腕骨向掌侧、近侧移位,尺骨茎突可发生骨折。
很少有嵌入骨折,掌侧骨皮质常有粉碎骨折块,骨折块旋转,桡骨缩短。
Barton骨折典型X线表现为骨折位于桡骨远端背侧缘或掌侧缘,骨折块较大时常与腕关节一起向掌侧或背侧半脱位。
X线片上常见合并有尺骨茎突骨折,骨折的尺骨茎突不同程度的分离,严重者向桡侧移位。
3.骨折分型无移位型:骨折无移位,或可为轻度嵌入骨折,腕关节轻度肿胀,无明显畸形,折端有环行压痛,纵轴挤压痛,前臂旋转功能障碍。
伸直型:远端向背侧移位,前臂下端呈“餐叉样”畸形,腕背侧可扪及骨折远端骨突。
屈曲型:远折端向掌侧移位,可伴下尺桡关节脱位,腕关节掌侧可扪及骨折远端骨突,畸形与伸直型相反。
半脱位型:桡骨远端背侧或掌侧缘骨折,可合并腕关节半脱位,腕关节肿胀,畸形呈半脱位,腕横径增宽。
桡骨远端骨折护理查房

功能锻炼
• 术后一天,即可开始功能锻炼。初期可练习上臂 和前壁肌肉舒缩活动,充分屈伸手指、握拳等的 动作。
• 2周后局部肿胀消退,开始练习肩、肘、腕等关节 活动,频率和范围逐渐增加。但禁忌做前臂旋转 活动。
• 4周后练习前臂旋转及用手推墙动作,是骨折断端 之间产生纵轴挤压力。利用器械做旋转活动练习 使患者屈肘90°和手拿火炬棒做前臂的旋前及旋后 练习等。
主要护理措施
• 护理问题:疼痛 与手术创伤、周围组织损伤有关 • 护理目标: 患者在疼痛时能及时得到缓解 • 护理措施:
1.抬高患肢,有利于血液回流,消除肿胀,减轻 因肿胀引起的胀痛不适。
2.采取舒适体位,应尽量采取健侧卧位,避免压 迫伤口。 3.遵医嘱给予药物镇痛。 4.物理治疗:理疗可促进血液循环和神经神经的 恢复,减轻患肢疼痛。 • 效果评价:患者制动时疼痛减轻
术后的护理问题及措施
潜在并发症的防治措施 • (1)及时复查:每两天复查一次。首先检查绷带松
紧及肿胀情况,骨折固定时根据手腕及前臂肿胀 情况随时调整石膏的松紧度。4周时摄X线片显示 骨折愈合,可解除固定,积极进行功能锻炼。 • (2)防止肌腱、神经损伤 • (3)早期应控制旋前移位:固定时应将患肢保持在 旋后15°位或中立位。旋前固定往往使前臂旋后功 能受限,会影响前臂的旋转功能。 • (4)早期正确的功能锻炼
临床分型
直接暴力和间接暴力均可造成桡骨远 端骨折,但多为间接暴力所致。根据 受伤姿势和骨折移位不同,可分为: 伸直型、屈曲型、背侧缘和掌侧缘4种 类型.
❖熊丽介绍:5床 李惠珍 女性 68岁 门诊以“ 右桡骨远端粉碎性骨折”收住我科 ,
❖病例汇报:患者自诉2小时前行走时不慎摔倒 ,右侧腕部撑地,当时即感右腕关节疼痛剧烈 、腕关节屈伸活动受限,腕关节畸形、渐肿胀 不适,遂就诊于我院,门诊拍片提示:右侧桡 骨远端粉碎骨折,周围可见部分,骨片分离移 位。建议住院治疗,患者及家属拒绝住院要求 行手法复位,故门诊予以手法复位术后,拍片 复查骨折位置稍欠佳,需进一步行手术治疗。
桡骨远端骨折健康教育

桡骨远端骨折健康教育
《桡骨远端骨折健康教育》
桡骨远端骨折是一种常见的骨折类型,通常发生在手腕附近。
这种骨折可能是由于摔倒、运动受伤或者意外事故引起的。
在这种情况下,正确的健康教育对于康复非常重要。
首先,当发生桡骨远端骨折时,患者应该立即就医并接受专业治疗。
医生会对骨折进行适当的诊断,并制定合适的治疗方案。
通常情况下,会进行复位和固定骨折部位,以便骨头能够正确愈合。
在接受治疗期间,患者应该遵循医生的建议,保持手腕部位的稳定,并避免进行剧烈的运动和重物提托。
在接受康复期间,医生可能会建议患者进行物理治疗,以帮助恢复手部的功能。
另外,患者在日常生活中也应该做好自我保护措施,避免再次受伤。
这包括避免摔倒、使用辅助工具以减轻手部的负担、并注意保持手部的稳定。
总之,对于桡骨远端骨折患者来说,健康教育是非常重要的。
通过接受专业治疗和遵循医生建议,患者可以尽快康复并避免再次受伤。
同时,在日常生活中也要注意手部的保护,减少受伤的风险。
希望所有患者都可以早日康复,重新恢复正常的生活。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1型:干垢端骨折:多数情况下有两个骨块。包括colles骨折和 simith骨折。
2型:关节面剪切骨折,包括barton骨折,chauffeur骨折
3型关节面的嵌压骨折,轴向应力导致软骨下骨及干垢端的冲床损 伤(die punch)。可以包括2-4部分骨折及粉碎性骨折。
4型:撕脱骨折伴有桡腕关节脱位,向掌侧或背侧脱位。
分型
• colles骨折:桡骨远端向背侧移位,同时伴有桡偏和短缩畸形,餐 叉样畸形。 • smith骨折:桡骨远端向掌侧移位,短缩。工兵铲畸形。 • barton骨折:累计桡骨远端掌侧及背侧关节面的骨折。可出现脱 位及半脱位。 • chauffeur骨折:舟状骨直接撞击导致的桡骨茎突骨折,或腕关节 极度尺偏造成的茎突撕脱骨折。
桡骨远端骨折
定义
• 桡骨远端骨折指距离桡腕关节面约2.5cm以内的骨折。(旋前方 肌以远)。
解剖
• 尺偏角:桡骨尺侧乙状切迹的中点与桡骨茎突的最高点的连线。 平均值为24度。 • 桡骨茎突高度:经桡骨乙状切迹的中点向桡骨长轴做垂线,测量 该垂线与桡骨茎突最高点的距离。平均值为11.6mm。 • 尺骨差异:有助于判断桡骨短缩程度,超过5mm有手术指征。
手术适应症
• 1型:手法复位后不稳定者。 • 2型:barton骨折为不稳定,不适合用外固定支架,应予以钢板固 定。chauff骨折可予以经皮空心螺钉固定。 • 3型:冲床样损伤的需切开复位,保证关节面解剖复位。 • 4型:关节韧带及关节囊损伤严重,腕关节不稳,往往需要固定 尺骨茎突的骨折,术后需外固定辅助。 • 5型:
• 关于植骨:桡骨远端骨折短缩>10mm,,桡骨的尺侧短缩 >5mm者。
关于尺骨茎突:术中做下尺 桡关节稳定性检查。 若行固定,前臂极度旋后, 沿尺骨背侧做切口,性螺钉 固定,张力带固定等。 若尺骨茎突未骨折,术中检 查下尺桡关节不稳,行超肘 关节制动腕、肘关节四周; 或行尺桡骨横穿克氏针;或 修复TFCC。
坎贝尔12版标准
屈腕超20°存在正中神经损伤风险。
屈腕超20°存在正中神经损伤风险。
• 手法复位1-6d再移位者,再次手法复位失败率87%。 • 7-15天再移位者,失败率50%
稳定性判断:具备以下特征难以通过石膏托等固定方法维持稳定
手术治疗
目的: • 恢复关节面及邻近关节之间的温和关系。 • 重建关节稳定性 • 恢复一个无痛且功能良好的关节。
入路的选择: 多数情况下改良的henry入路型掌侧钢板固定可获得良好效果,但 以下情况考虑联合入路:
• 掌侧入路:沿桡侧腕屈肌桡侧作纵行切口。
• 背侧入路:
• 切口:Lister结节 桡侧,建议跨腕关 节。
• Lister结节的尺侧打开伸肌支持 带,打开第3腱鞘筋膜,牵开 保护拇长伸肌腱,向桡侧作骨 膜下剥离,尽量不切开第2腱 鞘,将第4腱鞘牵开,向尺侧 骨膜下剥离,不要损伤最尺侧 的附着结构。 • 钢板应放置lister结节的尺侧。
5型:上述机制的联合损伤。常为高能量损伤。
评估
• teardrop角::反应的是关节面掌侧边缘的背伸情况。70°±5°。 若下降到45°一下,提示月骨关节面的(DRUJ间隙):增宽提示关节囊三角韧带复合 体损伤。
治
疗
• 保守治疗: 1.正位片:尺偏角≥15°;桡骨茎突长度超过尺骨茎突≥7mm; 2.侧位片:背侧成交<15°,或掌倾角<20° 。 3.关节面台阶≤2mm。
• 尺骨茎突:50%以上的桡骨远端骨折合并尺骨茎突骨折,其 中39%累计基底部,当尺骨茎突骨折导致下尺桡关节不稳当 予以手术治疗。 • 术中下尺桡关节稳定的判断:桡骨远端固定后,在极度旋前 位 ,向背侧推尺骨头,向掌侧拉桡骨远端。
三柱理论
• 桡侧柱:舟状窝和桡骨茎突。 40%负荷。舟状骨冲击造成的 骨折有侧向剪切力,钢板宜放 置桡侧。 • 中间柱:月状窝和桡骨半月切 迹。40%负荷。又分为掌侧和 背侧两部分。冲床损伤(die punch) • 尺侧柱:尺骨茎突,TFCC,腕 尺侧韧带等。20%负荷。
• 掌倾角:平均值十度。
•
三角纤维软骨复合体(TFCC):包括软骨盘,负责传递腕 部20%的压缩应力。浅部纤维、深部纤维,两者又分别有掌 侧和背侧两部分。还有两条软骨盘韧带(软骨盘-月骨,软骨 盘-三角骨)
• 旋前位:浅部韧带的背侧韧带紧张,深部韧带的掌侧韧带紧 张。
• 旋后位:浅部韧带的掌侧韧带紧张,深部韧带的背侧韧带紧 张