力觉临场感遥操作系统的研究进展
智造“顶天立地”的机器人——记东南大学电气仪器控制学部主任宋爱国

封面人物Cover Characters教授,32岁晋升为教授并评为博士生导师。
从刚毕业的博士迅速成长为独当一面的博士生导师,在宋爱国看来虽有自己的付出,但更有恩师的指引。
受少年百科丛书《飞向星星》的影响,宋爱国从小就对太空、宇宙充满着探索的好奇心。
高考时被招生老师“志在蓝天”的宣讲所感染,宋爱国将“南京航空学院”填在了志愿表上,之后在那里完成了本科、硕士学业。
为了领略不同学校的学术氛围,他到东南大学仪器科学与工程系攻读了博士研究生,师从黄惟一教授从事机器人技术研究。
宋爱国至今难以忘怀黄老师上第一节课的情形,“机器人传感技术”开课的第一天,黄老师向弟子们讲述了实验室从事机器人研究的历史,回忆起了一段悲痛的往事。
他说:“我们实验室的机器人研究事业,是实验室的创始人查礼冠老师用生命换来的!不将东南大学的机器人技术研究发展好,就对不起查老师!”那段话,一直激励着宋爱国。
宋爱国查礼冠教授是我国机器人事业的开拓者,她1958年就率领师生研制了我国第一台仿人机器人。
“文革”结束后的1978年,她敏锐地感觉到,机器人的时代将会到来,她征求了黄惟一等人的意见后,决定以机器人传感技术作为重点,组建实验室及团队,开展机器人的感知、控制和人工智能研究。
黄惟一老师作为查老师的主要助手,开始从陀螺仪与惯性导航技术的研究转为从事机器人技术的研究。
1983年,全国第一次机器人大会在华南理工大学召开,查老师作为大会的3个主要发起人之一带领黄老师及两位研究生一起去参加会议。
会议刚结束,两人走在华南理工大学校园里,一辆失控的汽车从斜坡上直冲而下,撞倒两位教师。
查老师当场身亡,黄老师重伤昏迷。
一年后,康复的黄惟一老师重新回到工作岗位,扛起了建设机器人传感与控制技术实验室的重任。
在他的带领下,团队重点开展机器人非视觉传感器的研究。
从1986年开始实验室得到国家原“863”高技术计划项目(以下简称“863”计划)的持续支持,并成为“863”计划先进制造领域机器人传感技术网点实验室的副组长单位。
力觉临场感遥操作机器人(2):操作者的输入输出特性建模

各 有长 处 , 但 前 者未 考虑 运 动反 馈 , 后 者 未能 充 分体 现 出操 作 者 的 复
本 文 的研究 目的就是 对操 作 者 在 力觉 临 场 感遥 操 作 系统 中的感
收 稿 日期 2 0 1 3 - 0 3 — 1 8 资助项 目 国家 自然科学基金项 目( 6 1 2 7 2 3 7 9 ) ; 江苏 省 自然科 学 基 金 重点 项 目( B K 2 0 1 0 0 6 3 ) 作者 简 介
1 操作者建模 的原则
1东 南 大 学仪 器 科 学 与 三 程 学 院 , 南 京 ,
2 1 0 0 9 6
基于 传递函 数 形 式的双 端口 网络 模型仍 然是力觉临 场感 遥操作
机器人系统设计与分析的最佳手段 , 它不仅物理概念清晰, 各组成单
宋爱 国, 等. 力觉临场感遥操作机器人 ( 2 ) : 操作者 的输入输出特性 建模
一
力 觉临场 感作 为 临场 感 的主 要 形 式 之 一 , 使 操 作 者 和 远 地 工 作 环境 之 间有 了动 觉 和 力 觉 的 联 结. 操 作 者 在 临 场感 遥 操 作 系统 中 的
操作 过 程 , 实 际 上 是 人一 机 器 人一 环 境 这 个 复 杂 的大 系 统 根 据 给 定 的工作 任务 而 自行控 制调 节 的过 程 . 在 临场 感遥 操作 机器 人 系统 的分 析和 设计 中必 须考 虑 到 人 的 因
中图分类号 T P 2 4 2 . 3 文献 标 志 码 A
特 性研 究方 面
, 其次 , 还 有 一 些 文献 从 人 机 工效 学 的角 度研 究 如
何 设计 遥操 作机 器人 系统 的结构 组 成 、 控 制方 式 与 人机 交 互界 面 , 从
临场感遥操作机器人综述
42机器人技术与应用2004.10. 引言遥操作机器人(Telerobot)是指在人的操作下能在人难以接近或对人有害的环境中,完成比较复杂操作的一种远距离操作系统。
临场感技术(Telepresence)是以人为中心,通过各种传感器将远地机器人与环境的交互信息(包括视觉、力觉、触觉、听觉、运动觉等)实时地反馈到本地操作者(人)处,生成和远地环境一致的虚拟环境,使操作者产生身临其境的感受,从而实现对机器人带感觉的控制,完成作业任务。
临场遥操作感机器人的实现不仅可以满足高技术领域发展的急需,如空间探索(卫星的修理,空间站的维护,月球、火星等行星的勘探)和海洋开发(海洋资源调查,深海打捞,水下电缆修理,海洋钻井平台维护,海底考古等)以及原子能应用,而且可以广泛地应用于军事领域(战场、防化、扫雷、救护等)和民用领域(远程医疗、远程教育、远程科学实验、旅游娱乐等)。
在这些场合中,遥操作机器人的应用使人摆脱了传统的操作者的角色,由直接操作(Operation)变成了遥操作(Teleoperation)。
遥操作不同于遥控,远方作业机器人是人类行为能力的延伸,其行为能力可通过“遥控(Telecontrol)”和“遥操作(Teleoperation)”来实现,香港中文大学的刘云辉教授通俗易懂地揭示了“遥控”与“遥操作”的区别:人在控制远方的机器人进行作业的同时,又必须得到机器人在“知觉”上的反馈,是否有足够的“知觉反馈”是“遥操作”区分与通常所说的“遥控”的要素之一。
具有临场感的遥操作与无临场感的遥控相比,在提高机器人的作业效率、作业精细程度等方面有着不可比拟的优点,因为临场感技术将人的经验、技能与远方机器人作业紧密结合在一起,使人可以自然和本能地控制机器人的作业,充分利用了人所固有的感觉和反应能力,实现了机器人与人脑的协调。
临场感遥操作机器人技术隶属于虚拟机器人研究领域,智能机器人研究的现状表明,由于受到机构、控制、传感器以及人工智能水平的限制,研究出能在未知环境中全自主方式工作的机器人是目前难以实现的目标。
虚拟现实力觉临场感遥操作机器人系统的稳定性
∫T
〈v y〉T = v ( t) y ( t) d t
(6)
0
在初值为零时有 :
〈 v Hv〉T ≥δ‖v ( T) ‖2 + β, Π v ∈ Ie , Π T ∈ P
(7) δ= sup{δ∈R + | β,使得 (7) 式成立} 。若 β= const ,δ ≥0 ,则称 H 为无源的 ;若 δ> 0 ,则称 H 为严格无源 的 。因 H 稳定 ,输入 v 和输出 y 之间有对应关系 , 于是 (7) 式在 δ> 0 的条件下还可表示为 :
1 系统结构
虚拟现实力觉临场感遥操作机器人系统结构 [ 6 ]
如图 1 所示 。它由操作者 (人) 、虚拟世界 (虚拟手和
虚拟环境) 、主手子系统 、从手子系统 、通信环节 、参
数辨识器 、环境等组成 。图中 , xm 和 f m 是主手终端
执行器的速度和作用力 , f m 等于操作者 (人) 给出的
虚拟现实力觉临场感遥操作机器人系统的稳定性 ①
陈俊杰1 ,2 , 黄惟一1
1. 东南大学仪器科学与工程系 ,南京 210096 2. 南通工学院自动化系 ,江苏 南通 226007
摘要 :具有良好的可操作性 ,又能确保系统稳定性是解决力觉临场感遥操作机器人系统时延问题的根本 。本文阐 述了采用 Popov 超稳定性理论分析并研究虚拟现实力觉临场感遥操作机器人系统的稳定性问题是行之有效的 ,并 给出了其分析方法 ,指出 Popov 超稳定性与无源稳定性理论是条件一致的 。实验显示本文所给出的方法的有效性 。 本文的论述对于系统的设计极具价值 。 关键词 :遥操作 ;虚拟现实 ;Popov 超稳定性 ;无源性 ;时延 中图分类号 :TP24212 文献标识码 :A 文章编号 :1004 - 1699 (2003) 04 - 0393 - 04
基于力觉临场感的遥操作技术研究

华中科技大学硕士学位论文Woo-Keum等人成功开发出了一套基于虚拟模型的力觉遥操作系统,成功的运动于ETS-Ⅶ,完成多项的实验研究[31]。
由于临场感技术在许多领域的重要性,我国863高技术计划中,智能机器人主题己将临场感技术及相关的虚拟现实列为关键技术进行研究。
近年来,我国逐渐开展了对虚拟现实临场感遥控作业系统的研究,而对虚拟现实力觉临场感遥操作系统的研究处于起步阶段。
其中,清华大学智能技术及系统国家重点实验室这几年来在视觉遥操作技术方面做了相关的研究工作,开发了一套“视觉临场感环境(VTE-Vision Telepresence Envirorvnent)”实验装置。
华中科技大学联合哈尔滨工业大学等几所高校也对遥操作系统进行了重点的研究,开发了一套基于虚拟现实的遥操作系统[46]。
1.3 本文主要工作本文主要研究基于力反馈的机械臂遥操作系统,着重对遥操作中力觉临场感的获取,力反馈的作用,基于力反馈的遥操作控制理论等方面进行了详细的分析,并且通过具体的实验来论证各个理论方法的可行性。
具体工作主要有以下几点:(1)构造了一个虚拟手的运动映射模型。
此模型能够将数据手套采集到的人手模型映射到虚拟场景中,再来引导灵巧手的运动,实现灵巧手的控制。
(2)结合课题实践,提出了基于实际材料的虚拟力外推技术。
将实验所得的力觉曲线融入到虚拟力的求解过程中,能有效的提高虚拟力的力觉临场感,在实际的项目中取得了很好的效果。
(3)实现了通过力觉传感器采集从端真实力觉信息,传递到主端操作者的力觉实现过程。
并分析了其中需要注意的两个技术难点,即机器人末端的简化运动学反解方法和灵巧手的力觉信息增强。
(4)虚拟现实是解决遥操作系统中时延问题的重要手段,但在建立虚拟模型过程中的模型误差问题会极大的破坏系统的有效性。
本文利用最佳接近速度理论,设计了一个具有模型纠错能力的基于虚拟的力反馈遥操作系统。
它能够对虚拟模型的误差进行一定的纠错,并对它的可行性和有效性进行了的分析。
东南大学:中国太空机器人

中国航天进展超乎想象 3年后太空机器人服役(图)2008年09月25日10:45新华报业网-南京晨报【大中小】【打印】科幻小说里的空间站机器人神七的发射,为中国建立空间站奠定了基础。
而在未来的空间站,一年中的绝大多数时间都是机器人在工作,而它们的一举一动则在地球人的实时掌控之中。
记者昨日获悉,东南大学机器人传感与控制技术实验室的专家们从上个世纪90年代就开始致力于太空机器人的研发,并列入国家863航天计划,攻破了一个又一个技术上的难关。
据预测,三年以后,东大参与研制的太空机器人有望升空,在空间站完成它们的历史使命。
空间站很多工作等着它在东大机器人传感与控制技术实验室,到处摆放着大大小小的机器人。
天天和这些东西打交道,实验室主任宋爱国称之为一项“很有趣的工作”。
宋爱国介绍说,中国航天计划分成三个阶段,神七是第二阶段发射的第一艘飞船,而这是为第二阶段的主要任务———建立空间站作好前期准备工作的。
“前面发射的‘神舟号’好比一艘艘船,船是需要停靠码头的,而空间站就是那个码头。
”但是,由于发射的成本太高,空间站只能是“长期无人值守,短期有人照料”,一年中只有个把月是航天员呆在里面工作,其他时间太空机器人就大有用武之地了。
宋爱国介绍,太空机器人不仅可以做各种科学实验,还可以进行空间站维护、空间站对接、卫星修理、帮助航天员出舱工作等等,用处可大了。
当然,目前人类的科技水准只能造出智能机械臂,东南大学机器人传感与控制技术实验室的专家们从上个世纪90年代就开始致力于太空机器人的研发,图为其小型智能机械臂一举一动受地面遥控遥远太空里的机器人,怎么才能根据地球人的意志来工作?宋教授道出了其中的奥妙:这些机器人学名叫“遥操作机器人”,地球人可以通过传感器等随时遥控它们的行动。
“临场感是遥操作机器人追求的目标。
”宋教授解释说,临场感包括两方面:一方面通过操作者所穿戴的数据背心、数据手套或操纵的手控器,以及头盔眼镜等装置,将操作者的身体、四肢、手部以及头部、眼球的运动信息进行检测,并作为控制指令,控制远地的机器人的本体、机械手以及头部和摄像头的运动;另一方面,又通过各种机器人传感器,将机器人的视觉、力觉、触觉以及运动觉等信息反馈给操作者,在操作者周围生成虚拟现实,使操作者感觉自己就是远在千里之外的机器人,从而产生“身临其境”的感受。
具有力觉临场感的遥操作操纵器关键技术研究_邓乐

第12卷第3期2005年6月工程设计学报Journal of Engineering DesignVol.12No.3Jun e 2005收稿日期:2004-11-15.基金项目:国家自然科学基金资助项目(50475011);教育部优秀青年教师资助项目(2003年).作者简介:邓 乐(1964-),男,江西萍乡人,副教授,博士生,从事力觉临场感机器人、流体传动与控制等研究,E -mail :dengle @hpu .edu .cn .具有力觉临场感的遥操作操纵器关键技术研究邓 乐1,2,赵丁选1,唐新星1( 1.吉林大学机械科学与工程学院,吉林长春130025; 2.河南理工大学机械工程系,河南焦作454000)摘 要:具有力觉临场感的遥操作操纵器是主、从遥操作系统重要的人机接口,它可以向远端从机械手传送位置、姿态、速度和力等多种信息,同时可以接收从机械手的力/力矩等信息,为操作者提供力觉临场感.其性能直接影响遥操作系统的透明性、稳定性,提供有效的力觉反馈是其研究、设计的关键.对力觉临场感操纵器设计中位置控制精度、操纵器的动态特性、操纵器的各向同性、稳定性、人体工程学指标等方面的性能要求进行了分析,对其结构形式、各向同性与结构非奇异性等结构设计方面的问题进行了研究,对各种驱动方式的特点进行了比较,并对检测与控制系统结构对于系统性能的影响进行了研究.研究表明,在结构设计时,采用机械上解耦、运行过程中惯性保持不变的机械结构,将使控制算法简化.研究结果对于该类装置的研究与开发具有借鉴作用.关键词:主从机器人;力觉临场感;力反馈控制器;关键技术中图分类号:T P 24 文献标识码:A 文章编号:1006-754X (2005)03-0159-04Research on key technologies of controller for teleoperationforce reflecting telepresenceDEN G Le 1,2,ZHAO Ding -xuan 1,T ANG Xin -xing1(1.Co lleg e of M echanical Science and Eng ineering ,Jilin U niver sity ,Chang chun 130025,China ;2.Depar tment of M echanical Engineer ing ,Hena n P olytechnic U niv ersit y,Jiaozuo 454000,China)Abstract :Contro ller for teleoper ation w ith force reflecting telepresence is an im portant man -ma-chine interface fo r a master-slav e m anipulation sy stem ;it can conv ey inform ation such as posi-tio n,or ientation,velocity and force to remote manipulato r and r eceive force/tor que inform ation to provide o perators fo rce reflecting telepresence .Its perform ance will directly influence trans-parency and stability of the teleoperation sy stem ,and delivering effective force -reflecting feed-back is the key po int in r esearch and design.T he key technolog ies in design of contro ller w ith fo rce-reflecting telepresence is analyzed and studied.A nalysis on perform ance requir em ents such as positio n control accuracy ,dy namic characteristic and isotropy of the co ntroller ,stability ,hu-man system engineering index is conducted and r esearch on structur e type,isotropy and structure no nsing ularity of structure design is carried out.And then the author compares the characteris-tics o f various driving m ode and studies m easurement and control system's influence on perfor-mance o f sy stem .T he results indicate that by adopting the structur e ,w hich is w ith mechanical deco upling and unchang eable inertia as operation,the contro l algor ithm w ill be simplified.T he results can be used as a reference fo r the research and development of this ty pe of device.Key words :master -slave teleoper ator ;force telepresence ;force -r eflected manipulator contro ller ;key techno logies 由于现有的机器人技术水平受到机构、控制、传感技术以及人工智能水平等方面的制约,目前,在一些危险,人不能接近或环境复杂、未知的场合,要求机器人完全自主地完成各种作业任务是不现实的,这时,往往需要操作人员必要的监控并采用遥操作机器人系统.近年来,在遥操作机器人领域,对力觉临场感相关技术的研究和应用受到广泛关注,国内外学者对各类操纵器进行了大量研究,取得了很多成果[1~5],出现了一些商用的力反馈手套、力反馈操纵杆、力反馈笔、基于力反馈的鼠标等.具有力觉反馈的操纵器(或称为主手)是遥操作系统的关键设备,是操作者感知环境并对远端从机器人进行控制的重要媒介,起到人机接口的作用.如何提供有效的力觉反馈和位置控制是操纵器研究的关键.现有的力反馈操纵器结构大体可以分为串联结构形式和并联结构形式,此外,根据主、从机器人的结构是否相似可分为同构式和异构式.一般主要由操纵器本体、驱动系统、信息检测与控制系统等几部分组成.本文将从操纵装置的性能要求、结构设计、驱动方式、检测与控制系统结构等方面阐述力觉临场感操纵器设计中的关键技术问题,对于操纵器的研究和开发具有一定的借鉴作用.1 操纵器的性能要求由于遥操作机器人系统的应用场合广泛,对于操纵器的性能指标要求无法采用统一的标准[6],一般应根据具体的使用场合决定.不过,从功能上讲,操纵器的作用主要包括两个方面,一方面,可以将操作者手部的位置和姿态信息实时、准确地传送给远端的从机器人操作机,另一方面,将远地从机器人操作机与环境的相互作用力/力矩信息反馈给操作者手部.理想的力觉临场感能使操作者感知的力等于从手与环境间的作用力,同时从手的位置等于主手的位置,此时的力反馈控制系统称为完全透明的.因而,总体上,应该具有结构简单、紧凑,操作灵活轻便,摩擦和惯性小,合适的操作空间和出力,符合操作者的动力学特性,通用性强等特点.主要包括以下几个方面:(1)位置控制精度.通常,操纵器上的位移传感器实时检测手部的运动并将位移信息作为控制信号传送给从手,因此,位移传感器的检测精度决定了从手跟踪主手位移的精度.根据具体的作业对象,对位置精度的要求不同,比如用于隧道顶部的锚杆钻机等工程机械的遥操作位置精度为厘米级,而用于主从式的遥微操作机器人的位置精度则为微纳米级.(2)力感知的范围.操纵器反馈至人手的作用力应处于适当的范围,力的下限与其机械结构、摩擦力、惯性力有关.研究表明,人手能够感知的最小阈值力大约是170.096g[7],因此操纵器的力觉阈值小于人手的最小阈值将是设计的目标之一.而操纵器力感知的上限应使操作者不易产生疲劳感为目标,近几年,国外有些取10~25N.(3)操纵器的动态特性.应使操纵器的动态响应与人手能够感知的信号频率范围匹配,这由操纵器上驱动元件的动态响应决定.(4)操纵器的各向同性.操纵器的各向同性主要是指在任何位置和姿态下动力学参数的一致性,如摩擦力、重力和惯性张量在不同位姿下的一致性,特别是惯性张量的一致性,它是操纵器位姿的函数,其数值的较大变化会引起同样大小的反馈力,在不同位置给人造成不同的力感觉.因此,应设法使操纵器驱动元件的力/力矩控制信息中不包含与位姿有关的信息.(5)稳定性.操作者与远端机器人之间的通信时延是影响遥操作系统的突出问题,时延降低了系统的稳定性;基于无源二端口网络和散射理论、自适应预测控制理论、滑模控制理论、鲁棒控制理论等的方法,有望消除或减缓时延的影响.对于远端机器人与环境碰撞冲击造成的稳定性问题,可设计一个自适应力控制器,其中包括一个扰动观测器和环境参数观测器,当环境刚性已知或工作过程中变化时,该控制器能够适应这种变化,保持良好的控制性能.(6)人体工程学指标.应按照人体工程学进行操纵器的结构设计,考虑操作的舒适性、安全性、宜人性,设计适当的操纵空间,或通过设置不同的主、从位移比和力比,实现对人体肌力和运动的放大、缩小,使操作者对于软硬不同的操作对象和操作空间变化较大的从机械手,既能保证力感觉的逼真又不致于产生疲劳感,还能实现较大操作空间的遥操作.2 结构设计操纵器直接与操作者的手部交互,其机械结构形式、结构尺寸、制造加工精度等直接影响其操作性能和对环境感知的逼真度.2.1 结构形式串联机构各环节的累计误差较大,运动学正解容易,逆解复杂,精确的运动控制难以实现,但工作空间大.并联机构是复杂的空间多环机构,同串联机构・160・工 程 设 计 学 报第12卷相比,其构件数目多,构件间存在严重的耦合关系,从而使得动力学方程相当复杂.并联机构运动学逆解容易,但正解复杂,可以对平动与转动实行解耦,有利于提高控制精度,而且机构刚度大、承载能力大、无积累误差,因而,基于并联机构(如Stew ar t平台)的操纵器的设计研究越来越受到重视.但不足之处是工作空间范围小,姿态变化幅度有限.研究表明,对于Stewar t并联机构,操作空间的大小与上、下平台的半径比和结构扭角有关[8],两者增加有利于操作空间的增大.同构式是指主、从机械手的结构形式及自由度相同,从手按比例跟随主手运动,结构简单,运动及控制较容易实现.目前,国内外以同构式为主.但占用空间较大,只能适用单一的从机械手,缺乏通用性.异构式的主、从机械手结构及运动关系不明确,两者的运动和动力对应关系需在计算机中经过运动学和动力学正逆解计算,将关节空间映射到操作空间,通过合理地选择主、从手之间的力比,将其分配到操纵器各个关节上,由各关节驱动元件产生操作者感知的力信息.通常,控制算法比较复杂,但运动形式灵活多样,通用性强,更适合现代机器人智能化的需要.理想的操纵器应能实现机械结构上解耦,从而简化运动学和动力学解耦运算问题,实现实时控制.2.2 各向同性与结构非奇异性操纵器在不同的位形时应具有力觉临场感的各向同性.雅可比矩阵的条件数反映了操作空间和关节空间之间速度和力线性传输的各向同性能力,对机构本身的运动控制特性有很大的影响.机构的结构尺寸与条件数的大小密切相关,条件数愈小,愈容易实现高精度的运动控制,各向同性越好.当条件数等于1时,机构处于最佳的运动传递性能,称机构的这一形位为各向同性.在确定结构参数时,一方面应使雅可比矩阵的条件数在关键工作位置处的数值尽量小,另一方面应使其正常工作范围落入条件数较小的范围内,以保证它具有良好的运动控制性能.当机器人机构处于某些特定的位形时,其雅可比矩阵成为奇异阵,行列式为零,这种位形称为奇异位形.当机构处于奇异位形时,其机构具有多余的自由度,将失去控制,因此在设计和应用时应避开奇异位形.2.3 其 他操作者感知的环境的力/力矩信息受主操纵器本身动力学特性的干扰,尤其当操纵器各关节的惯量和摩擦较大时,力感知的精度和灵敏度将大为降低.为了减小系统误差,实现高精度的力觉反馈,操纵器机构应具有足够的机械刚度,采用低惯性和低摩擦的关节结构,设法消除传动部件的摩擦、回程间隙等非线性因素,避免构件挠曲和弹性变形引起的位置误差,尽量减少中间环节,提高动态响应频率.例如,采用液压驱动方式时,为了减小操纵器的阻抗,液压缸应选用低摩擦的有圆锥静压轴承的静压伺服油缸,在满足工作要求的前提下,尽量使其结构紧凑、重量轻,为操作者提供高保真的力觉临场感.力觉临场感系统的一个特点是通过从机器人与环境交互的力反馈而使操作者感知环境的动力学特性,因此,碰撞是不可避免的.碰撞过程中,控制系统中的参数会发生变化而产生颤噪干扰,容易造成系统工作不稳定.因此,为了有效地抑制碰撞对系统造成的干扰,应在结构设计时采取一定的措施,减少反馈力对主手的反冲力.基于人的遥操作系统必须建立在以人为本的基础上,应从人机工程学的观点出发,处理好力觉临场感与操作舒适性、宜人性、灵巧性、安全性、稳定性、工作空间等性能之间的关系.3 驱动方式通常,操纵器(主手)的运动由操作者手动驱动,各关节驱动机构将力觉临场感提供给操作者,是为操作者提供力感知的关键部件.驱动机构的结构很大程度上决定了操纵器本体的结构,驱动机构的类型又与检测控制系统的控制策略密切相关.传统的驱动方式有电动、液压、气动,近年来,出现的新型功能材料在某些场合具有独特的优点.驱动方式的选择应考虑具体的使用场合、使用要求等因素,以满足操作者手部的力觉感知.对于驱动机构的基本要求是具有足够的带宽和动态范围、较大的功率密度(功率/重量或功率/体积),另外,由于与操作者的手部直接接触,安全性要求必不可少.比如,直流力矩电机能够在长期堵转或低速运行时产生足够大的转矩,并且可以直接带负载,具有反应速度快和转速波动小,低速稳定性、机械特性和控制特性线性度好等特点,适合在位置伺服或低速伺服系统中作执行元件.气压传动可以实现柔性、安全、紧凑、重量轻,而且清洁,不污染环境,适合作便携式的操纵器.但由于气体的可压缩性较大,因此很难实现精确的位置控制.液压传动功率密度大、响应快,可以实现精确的・161・ 第3期邓 乐,等:具有力觉临场感的遥操作操纵器关键技术研究位置、力控制等,但需要一套专门的泵站.由各种新型功能材料构成的新型驱动机构,如形状记忆合金机构、压电晶体驱动机构、电致和磁致伸缩驱动机构、气动肌肉等将在某些特定条件具有应用前景.4 检测与控制系统结构通常,力、位移传感器是力觉临场感系统中必不可少的信息检测工具,传感器直接影响力觉临场感的性能,精度高(分辨率、灵敏度和线性度等)、可靠性高和抗干扰能力强的传感器是实现力反馈操纵器功能的基础.传感器检测目的是充分利用主、从机械手两侧的力和位置(运动)信息,抑制惯性力、摩擦力等因素对力反馈的干扰,实现力觉闭环控制,提高透明性;通过位置的闭环控制,实现从手对主手的位置跟随.多维力/力矩传感器在力觉临场感中起重要作用,通常其输出的力是耦合的,这就要求传感器的信号处理系统进行软件解耦,因而检测系统较复杂.根据位移量的类型(直线或角位移)和位移控制精度选择位移传感器类型、精度、量程.研究表明[9],力传感器本身的刚性和安装位置对系统稳定性有影响,应尽量采用柔性大的腕力传感器,并且尽量靠近关节驱动器,减小操纵器本体动力学对稳定性的影响.对于主、从机械手系统,控制结构选择的主要问题是如何在系统的稳定性和临场感透明性之间实现折中.早期的遥操作控制结构主要有:位置-位置型、位置-力型、力反馈-位置型以及改进的力反馈-位置型等.其作用是在保证系统稳定的前提下,提高系统的操作性能.由于在遥操作系统中,时延不可避免,较大的时延通常会使系统不稳定.因此,近年来又出现了许多针对主、从机械手双向控制系统时延的各种控制方案[10],比如基于无源性、柔顺性、预测或自适应控制、滑模变结构控制等的各种不同控制方案,其主要区别在于采用主、从手两侧的位置和力信息的不同组合,构成不同的控制算法,实现多传感器的信息融合,从而实现从手对主手位置的跟随,并对主手驱动机构的力进行控制,同时保证系统的稳定性.研究表明,适当的控制策略可以有效地抑制系统内的动力学干扰.力反馈系统的控制结构决定了主手上传感器的种类、数量、结构、安装位置,操纵器结构设计必须以控制结构为依据.控制策略不同,操纵器的控制(驱动)信号不同(如力/力矩信号、位置/速度误差信号或几种信号的组合等),对操纵器本体的结构要求有很大差别,如有些要求可逆.此外,如果在主手上安装各种力、位移传感器,则可能使传感器冗余配置,造成不必要的浪费.因此,操纵器的结构设计必须针对确定的控制结构.刚体动力学逆问题是机构动力分析、动态设计和控制器参数整定的理论基础,已知动平台的运动规律,求解铰内力和驱动力.相应的建模方法有牛顿-欧拉法、拉格朗日方法、虚功原理、Kane方程等.利用雅克比和海赛矩阵建立操作空间和关节空间速度和加速度的映射关系,并根据此关系构造各运动构件的广义速度和广义惯性力.串、并联机构通常是非线性、强耦合、变参数的非线性多变量时变系统,采用传统的控制系统设计方法很难满足控制要求.例如,对于多自由度的操纵器,动态结构复杂,各自由度互相影响,非线性因素干扰,对其进行补偿的控制算法非常复杂,难以实现实时控制.因此,在操纵器结构设计时,尽量采用机械上解耦、运行过程中惯性保持不变的机械结构.通常,在操纵器的动态方程中,惯性力矩与关节加速度呈线性关系,在力控制算法中较容易实现,而离心惯性力矩和哥氏惯性力矩与关节加速度呈非线性关系,给操纵器的力控制算法带来困难,同时对力觉反馈信息产生干扰,必须在机械结构上采取技术措施加以解决,比如采用动平衡装置,使这两个非线性量在运动过程中互相抵消,从而使操纵器的惯性保持不变.因此,研究解决非对称特性、变负载和交联耦合干扰的控制策略是操纵器驱动系统研究中的重要内容,神经网络、自适应控制、预测控制、H∞鲁棒控制、智能控制、变结构控制等现代控制理论和方法将为此类问题的解决提供有效途径.5 结 论力反馈操纵器是遥操作系统中重要的人机接口,它涉及机械学、力学、电子学、生物学、信息科学、控制理论、人工智能、材料科学、人机工程学等学科,是各学科技术的集成.各部分的设计不是孤立的,而是互相联系、互相制约的,甚至是互相矛盾的,设计时应该采用系统的观点,全面、综合地考虑.可以相信,随着遥操作技术应用领域的扩大,研究和开发高精度,高刚度,结构紧凑,汇集机构、检测和控制、驱动多种功能于一体的力觉临场感操纵器,将具有重要的理论意义和广阔的应用前景.参考文献:[1]A DA M S R J,HA NN A F ORD B.Stable hapt ic inter ac-tio n with v ir tual envir onments[J].I EEE T r ansact ions o n R obot ics a nd A ut omation,1999,15(3):465-474.(下转第181页)・162・工 程 设 计 学 报第12卷lation chinese tr aditio nal medicine dr y ness tow er[J].Phar maceut ical&Engineer ing D esign,1999,(1):6-9.[2]王喜忠,于才渊,周才君.喷雾干燥[M].北京:化学工业出版社,2003.51-52.WA N G Xi-zho ng,Y U Ca i-y ua n,Z HOU cai-jun.Spr ay Dr yness[M].Beijing:Chemistr y Industr y P ress, 2003.51-52.[3]刘广文.喷雾干燥实用技术大全[M].北京:中国轻工业出版社,2003.33-37,309-310.L IU G ua ng-w en.T he Pr acticality T echnique fo r Spr ay Dr yness[M].Beijing:China L ight Industr y P ress, 2003.33-37,309-310.[4]于才渊,李富贵,王喜忠.搅拌流化床喷雾造粒过程实验研究[J].化学工程,2001,29(6):34-35.Y U Ca i-y ua n,L I Fu-gui,W A NG X i-zhong.Ex per i-mental st udy o n the spr ay g ranulatio n in the fluidized bed w it h ag itat or[J].Chemical Eng ineering,2001,29(6):34-35.[5]李昭华.中药喷雾干燥生产经验介绍[J].中成药,2003,25(3):256-257.JI Zhao-hua.Intr oduced pr oducing ex per ience o f spr ay dr yness on Chinese tr aditio nal medicine[J].Chinese T r aditio nal P atent M edicine,2003,25(3):256-257. [6]杨 勇,胡 远.喷雾干燥技术在我院中药制剂生产中的应用[J].时珍国医国药,2004,15(3):155-156.YA N G R ong,HU Y uan.T he application fo r spr ay dry-ness in my ho spital Chinese tr adit ional m edicine pr epa-r ation pr o ductio n[J].L ishizhen M edicine and M ater ia M edica Research,2004,15(3):155-156.[7]齐 涛,于才渊,王喜忠,等.底部进料流化床喷雾造粒器内尿素造粒过程[J].化工冶金,1998,19(1):22-23.QI T ao,Y U Cai-y uan,WA N G Gx i-zhong,et al.U r ea gr anulation pr ocessin a bo tto m feed fluidized-bedspra y gr anulato r[J].Eng ineering Chemistry&M etalllurg y, 1998,19(1):22-23.[8]耿 ,陶建生.喷雾干燥技术及其在中药制药中的应用[J].中成药,2004,26(1):66-67.JIN G Zhao,T A O Jiang-sheng.T he applicat ion for spr ay dr yness in Chinese tr aditio nal medicine phar macy [J].Chinese T r aditional Pat ent M edicine,2004,26(1): 66-67.[9]袁 文.四流体喷嘴的喷雾干燥装置[J].医药工程设计,2001,22(4):7-8.Y U A N Wen.Spray dry ness dev ice of four liquid nozzle [J].P harmaceutical&Engineer ing Desig n,2001,22(4):7-8.[10]L EA CH G,OL IV EIRA G,M OR AI S R.Spr ay-dr yingo f dunaliella salina to pro duce a B-car ot ene rich pow der [J].Jo ur nal of Industr ial M icr obio lo gy and Biotechnol-o gy,1998,20(2):82-85.(上接第162页)[2]刘 宏,HI RZIN G ER G.智能机器人灵巧手的研究[J].西安交通大学学报,2003,37(4):331-337.L IU Hong,HIR ZIN G ER G.DL R dex ter ous r obot hand ⅠandⅡ[J].Journal o f Xi'an Jiaot ong U niv ersit y, 2003,37(4):331-337.[3]王树国,任 倩,蔡鹤皋.利用虚拟现实和力反馈的遥现技术综述[J].中国机械工程,1999,10(7):803-806,824.WA N G Shu-g uo,REN Qian,CA I He-g ao.A sur vey of telepr esence t echnolo gy w ith virt ual reality and for ce reflectio n capabilities[J].Chinese M echanical Eng i-neer ing,1999,10(7):803-806,824.[4]岳 宏.基于虚拟现实触觉感知接口技术的研究与进展[J].机器人,2003,25(5):475-480.Y U E Hong.Research and pr og ress of haptic inter face t echnique based o n the virt ual realit y[J].Ro bo t,2003, 25(5):475-480.[5]宋爱国,黄惟一.临场感测试技术及力觉临场感的实现[J].仪器仪表学报,1996,17(3):249-254.SO NG A i-g uo,HU AN G Wei-yi.T elepr esence measur-ing technique and r ealizatio n o f for ce sensing t elepres-ence m ea sur ing[J].Chinese Jour nal of Scientific Instru-ment,1996,17(3):249-254.[6]宁 .手控器的性能和评价方法[J].机器人,2000,22(4):282-288.N IN G Y i.T he per for mance and evaluatio n met hod of master manipulato r[J].R obot,2000,22(4):282-288.[7]M ASSI M IN O M J.Impro ved for ce perceptio n thro ughsensor y substitutio n[J].Co ntr ol Engineer ing P ractice, 1994,3(2):215-222.[8]黄 田,汪劲松,WHIT EHO U SE D J.Stew art并联机器人位置空间解析[J].中国科学(E辑),1998,28(2): 136-145.HU AN G T ian,W A NG Jin-so ng,WHIT EHO U SE D J.Wo rkspace analy sis of stew art plat for m r obo t[J].Sci-ence in China(Ser ies E),1998,28(2):136-145.[9]黄秀清,杨叔子,顾崇衔.机器人力控制的稳定性研究[J].华中理工大学学报,1996,24(4):63-66.HU A N G Xiu-qing,Y A N G Shu-zi,G U Cho ng-xian.O n t he stability of a r obo t contr ol sy stem[J].Jour nal o f Huazhong U niver sity of Science and T echnolog y, 1996,24(4):63-66.[10]PA O L O A rcar a,CLA U D IO M elchior r i.Contr olschemes fo r teleoper atio n with time delay:A co m-pa rative study[J].Robo tics and Auto nomo us Sy s-tems,2002,38:49-64.・181・ 第3期曾亚森,等:一步造粒中药干燥塔关键部件结构与参数的研究。
基于Internet力觉临场感遥操作机器人系统的研究

年 中 , 于 Itre力 觉临 场感遥 操 作机 器人 系统 受 基 nent
力 、 力和财 力竞 相 开发相 关技 术进 行研 究和 开发 , 物
到了越来越广泛 的关注 和研究。尤其是近 几年来 , 计算机 网络技术的飞跃发展给交互式远程遥操作机 器人 技 术提供 了广 阔的应 用 空 间…。遥操 作 力觉 临 场感 机器人 系统 是在 人的 操纵下 能在 人难 以接近 或
m e h d a d t e r s F n l s d v l p n r s ecs a e f r c t d. t o n h o i . i a l i e e o i g p o p t r o e ase e yt
Ke y wor s: I nere ; ee p ai o r o ;i d a me
Re e r h on I t r e — s d f c e lc i g t l o t y t m s a c n e n tba e or e r fe tn eer bo s e s G UO a — o. Xio b SO NG — u Ai o g
( e at n fn t me t c n ea dE gn eig S uh a t nv ri , a j g2 0 6 C ia D pr me t sr n S i c n n ie r , o te s U ies y N ni 1 9 , hn ) oI u e n t n 0
0 引言
2 世纪 8 年 代对 智能机 器 人的研 究表 明 , O O 由于 机 构 、控 制 、人 工智 能 和传感 技术 水平 的 限制 ,在
短时 间内 尚难 以研制 出能在未 知或 复杂 环境下 工作
移动机器人遥操作中力反馈技术的研究
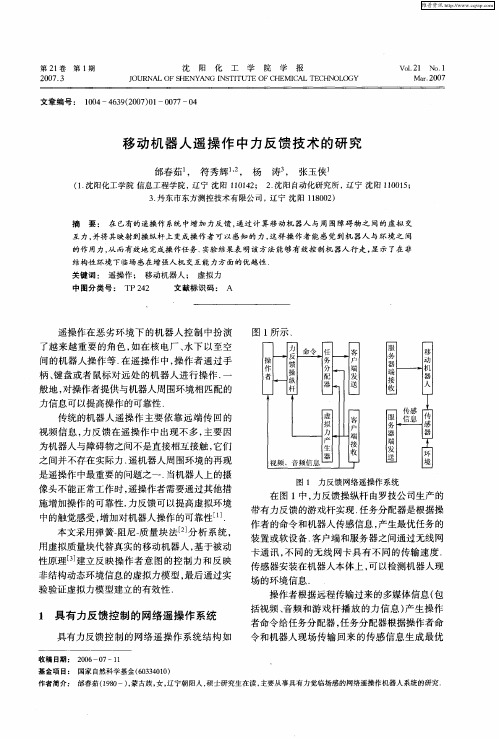
的作用力 , 而有 效地 完成操作任务 、 从 实验结果表 明该 方法能够有 效控 制机 器人行走 , 示 了在 非 显
结 构 性 环 境 下 临 场 感 在 增 强 人 机 交 互 能 力方 面的 优 越 性 .
关键词 : 遥操作 ; 移动 机器 人 ; 虚拟力
中图 分 类 号 : T 4 P2 2 文 献 标 识 码 : A
2 系统动 力学分析
2 1 系统 建模 .
假设 人类 操 作 者和 环 境 的交 互 力 作 用 在 一 个 虚 拟质量块 上 , 即把机 器人模 拟成 一个 虚拟质 量 块 . 2显 示 的是 当机器人周 围只有一 个 障碍 图 物时 作用在 虚 拟 质 量 块上 的力 , 障碍 物施 F 为
遥 操作 在 恶劣 环 境 下 的机器 人 控 制 中扮 演
了越 来 越重 要 的 角色 , 在 核 电厂 、 下 以至空 如 水
图l 所示
服
间 的机 器人 操 作 等 . 遥 操 作 中 , 作 者 通 过手 在 操 柄 、 盘或者 鼠标 对 远处 的机 器人 进 行操 作 . 键 一 般地 , 对操作 者提供 与 机器人 周 围环境 相 匹配 的 力 信 息可 以提高操 作 的可靠性 .
文 章 编 号 : 10 —4 3 (0 7 0 —0 7 0 0 4 6 9 20 ) 1 0 7— 4
移 动机 器 人遥 操 作 中力 反馈 技 术 的研 究
邰春茹 符秀辉 , 杨 , 一 涛 张玉侠 ,
(. 1沈阳化工学院 信 息工程学院 , 辽宁 沈 阳 10 4 ; 2 沈 阳 自动化研究所 , 1 12 . 辽宁 沈阳 10 1 ; 10 5
传感器安装在机器人本体上 , 可以检测机器人现
基于神经网络的遥操作工程机器人力觉反馈技术
基于神经网络的遥操作工程机器人力觉反馈技术提出基于神经网络模型的摇操作主从式工程机器人的力觉反馈技术原理。
首先根据机器人从动手机构的空载动力学特性,离线建立了空载神经网络模型,然后依此模型在线辨识空载驱动力以间接提取负载力。
该方法可提高力觉反馈的准确性和同步精度,实验结果验证了其有效性。
1 引言人们在人体难以靠近的场所如宇宙空间、海底、地下及原子反应堆等附近的高温、高压、强辐射等恶劣环境中作业时,有必要使用遥操作工程机器人系统完成作业任务。
为了提高机器人系统的作业效率,需要将远端作业现场的声音、图像、运动和力等信息反馈给操作者,使操作者在听觉、视觉、运动觉和力觉上具有临场现实感。
而在一些特殊场合,操作者对力觉反馈的质量要求更高。
为了完成精确的操作任务,操作者不但要求能感觉到远端作业现场的实际负载力,还要求其力觉能与负载存在同步。
实现上述要求的前提是必须首先准确提取负载力,目前一种方法是在机器人抓取机构的末端安装测力传感器直接检测负载力;另一种是检测相关参量间接求出负载力。
前者可使操作者获得真实的力觉,但测力装置易受现场环境影响,磨损问题突出。
后者虽易于实现,但现有的算法误差较大,操作者获得的力觉精度不高。
针对此问题,本文提出—了利用抓取机构的空载神经网络(NN)模型间接提取负载力的方法,在日本岐阜大学开发的遥操作工程机器人上进行了实验研究,验证了该方法可以有效提高力觉反馈的准确性和同步精度。
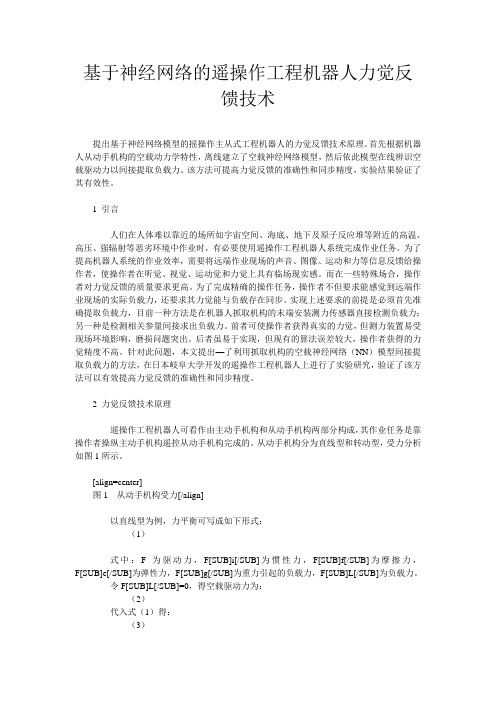
2 力觉反馈技术原理遥操作工程机器人可看作由主动手机构和从动手机构两部分构成,其作业任务是靠操作者操纵主动手机构遥控从动手机构完成的。
从动手机构分为直线型和转动型,受力分析如图1所示。
[align=center]图1 从动手机构受力[/align]以直线型为例,力平衡可写成如下形式:(1)式中:F为驱动力,F[SUB]i[/SUB]为惯性力,F[SUB]f[/SUB]为摩擦力,F[SUB]e[/SUB]为弹性力,F[SUB]g[/SUB]为重力引起的负载力,F[SUB]L[/SUB]为负载力。
具有力觉感的主从医疗机器人双向控制系统的动力学模型研究

节 、从 操作 手 ( 简称从 手 )和环境 构成 。操作 者 的
任务 和动 作指 令通过 主机 械 手 、通讯 环节 和机 械手 作用 于环 境 ,而 环境 对从 机械 手 的作用及 环境 信 息 则经 过上 述环节 反 向传输 到 操作者 手 部 。通 常采用 双 向力反 馈遥 操作 系统 实现 力觉 临场 感 。国 内外学
李世 杰 ,张艳蕊 ,毕海 霞 ,高 娜
L S ii, H G Y nriB i i, O a I h-e Z AN a .u, l . 津 3 O 3 ) O l 0
摘
要 :本文基于对主从机器人控制系统的动力学分析 , 研究 了借助 力觉临场感技术实现主从 医疗机
所示 ,它 由操 作者 、主操 作手 ( 简称主 手 ) 讯环 、通
术 的研 究 ,经过 短 时间 的快速 发展 ,目前该 项技 术 已经在 医疗 外科 手术规 划 模拟 、微 损伤 精确 定位 操
作 、无损 伤诊 断和 检测 ,新 型手 术医 学治 疗方法 等 方面得 到 了广泛 的应 用 。 力临场 感技 术是 交互 技术 的核 心 。它一 方面 将
的交 互反 馈控制 ,早 期的 遥控机 器人 系统 采用 双 向 位置 反馈 来实现 力 觉临场 感 。基 于 传感器 技 术的提 高 ,使 我们 能够 采用 高性 能 的腕力 传感器 实现 主从
手 间的双 向力 觉反 馈 ,为 采用 更先 进 的控 制方 法进
一
的应 用前景 将更 加广 阔 。主从 式 医疗机 器人 技术 是 主从 式遥操 作机 器人 的一 个重 要应 用 ,是一 个 集医 学 、生 物力 学 、机 械学 、机械 力学 、材料 学 、计 算
、 訇 化 l 生
基于临场感的遥操作机器人共享控制研究综述

DOI: 10.3785/j.issn.1008-973X.2021.05.004基于临场感的遥操作机器人共享控制研究综述陈英龙1,2,宋甫俊1,张军豪1,2,宋伟3,弓永军1,2(1. 大连海事大学 船舶与海洋工程学院,辽宁 大连 116026;2. 大连海事大学 辽宁省救助及打捞工程重点实验室,辽宁 大连 116026;3. 浙江大学 海洋电子与智能系统研究所,浙江 舟山 316021)摘 要:共享控制策略作为基于临场感的遥操作机器人的主要控制模式,能够充分利用操作者的感知、判断和决策能力,也能发挥出机器人自身的优势. 阐述遥操作机器人临场感技术;综述遥操作共享控制策略的发展现状,主要基于触觉反馈引导、运动学限制规避以及共享因子分配等,对各控制策略的原理进行介绍,并梳理和分析遥操作共享控制策略发展中的瓶颈和不足,如共享因素的单一化或僵硬化、时延问题和机器人自主判断能力有限等问题. 针对研究存在的局限性,从3个方面对未来的发展提出展望,分别为提升干预水平、加强机器人意图预测、结合机器学习, 具有一定的指导意义.关键词: 遥操作;共享控制;临场感技术;控制策略;共享因子;触觉反馈中图分类号: TH 11 文献标志码: A 文章编号: 1008−973X (2021)05−0831−12Telerobotic shared control strategy based on telepresence: a reviewCHEN Ying-long 1,2, SONG Fu-jun 1, ZHANG Jun-hao 1,2, SONG Wei 3, GONG Yong-jun 1,2(1. Naval Architecture and Ocean Engineering College , Dalian Maritime University , Dalian 116026, China ;2. Key Laboratory of Rescue and Salvage Engineering Liaoning Province , Dalian Maritime University , Dalian 116026, China ;3. Institute of Marine Electronics and Robotics , Zhejiang University , Zhoushan 316021, China )Abstract: The shared control strategy, as the main control mode of teleoperation robots based on telepresence, canmake full use of the operator's perception, judgment and decision-making ability, and utilize to the robot's own unique advantages. The telerobotic telepresence technology was introduced. The development of teleoperation shared control strategy was summarized. The principles of each control strategy were introduced mainly based on tactile feedback guidance, kinematic constraint avoidance and sharing factor assignment. The bottlenecks and shortcomings in the development of telerobotic shared control strategy were analyzed, such as the singleness or rigidity of shared factors, time delay and limited autonomous judgment ability of robots. The future research trends were proposed from three aspects in view of the limitations of the current study, namely, improving the intervention level, strengthening robot intention prediction, and combining machine learning, which have a certain guiding significance.Key words: teleoperation; shared control; telepresence technology; control strategy; shared factor; tactile feedback随着机器人技术的不断发展,在许多对人类不利的环境中执行任务时,依靠遥操作机器人既可以避免操作中的危险,又降低操作成本,提高了作业质量和效率[1]. 在过去的几十年里,关于机器人的智能自主性研究取得了不小进步. 然而,在目前可用的技术条件中,由于非结构环境的制约、人工智能和环境重构等相关限制,机器人自主化操作方式并不能保证任务安全、准确、平稳收稿日期:2020−11−02. 网址:/eng/article/2021/1008-973X/202105004.shtml基金项目:国家自然科学基金资助项目(51705452,51905067,U1908228);工业和信息化部高科技船舶资助项目(2018ZX04001-021);大连市科技创新基金重点学科重大资助项目(2020JJ25CY016).作者简介:陈英龙(1984—),男,副教授,博士,从事流体传动及控制、机电系统高级运动控制和机器人技术研究./0000-0002-2149-093X. E-mail :*********************.cn通信联系人:弓永军,男,教授,博士. /0000-0001-7665-7111. E-mail :*******************第 55 卷第 5 期 2021 年 5 月浙 江 大 学 学 报(工学版)Journal of Zhejiang University (Engineering Science)Vol.55 No.5May 2021地完成,纯自主化机器人仍然具有挑战性[2]. 相反,人类在动态环境或意外情况下可以做出更加灵活和全面的反应. 对于如医疗手术、家庭服务、康复辅助等任务而言,既需要机器人的自动化,也要求训练有素的人员的专业知识,而完全自主系统一直以来受到安全、法律、成本等因素的限制[3-4].遥操作机器人技术允许人类扩展他们的物理能力,使人类能够实现干预操作或在对人类不利的环境中执行任务[5].自从1954年Goertz等[6]介绍了第1套机械驱动的遥操作机器人系统以来,遥操作机器人领域取得了较大进展. 在早期遥操作系统中,传感和控制由操作者本身掌握,操作者包含在底层的控制环中,远端机械臂在操作者的直接控制之下,不具有任何自主功能. 如在最早的遥控焊接实验中,通过夹持器夹持焊枪,再附带简单的距离保持器来完成核环境、水下环境、空间环境和其他极限环境下的遥控焊接[7]. 针对从端自主焊接控制不足的问题,哈工大通过对遥控焊接任务空间从宏观到微观的分析,建立焊接遥操作的人机协作智能分配模型,提出“宏观遥控、局部自主”的控制思想,设计遥控焊接任务的控制策略——人机协作控制策略[8]. 类似的遥操作机器人研究还有医疗手术辅助机器人[9]、水下机器人(remote op-erated vehicle,ROV)[10]、空间机器人[11]及灾难搜救机器人等[12],它们的基本结构都是由人类操作员通过操纵杆或替代设备如鼠标和手势指令来遥控制机器人执行任务.虽然遥操作机器人领域已经取得了巨大进展,甚至其中一些已经商业化,得以应用于实际,但操作人员指挥从端机器人的方式并没有太大的改变. 一般来说,操作者在对从端机器人在远程环境中的行为进行视觉监控的同时,直接向从机器人发出特定的指令,称之为直接遥操作,它经常给操作者带来沉重的认知负担[13]. 除此之外,操作者与遥控机器人之间通信的时延和带宽限制一直是制约遥操作系统性能的主要因素;在使用传统的遥操作系统时,操作者的2种重要感知(视觉和力觉)被剥夺,严重影响操作者完成遥操作任务的能力[14]. 尤其是面对非结构环境、突发的事故时,人类操作者不能够及时处理问题,会降低任务成功率,甚至给用户带来人身安全隐患,也会使得操作者处于高度紧张状态,易产生精神疲劳,降低工作效率.为了解决上述问题,科研人员进行了许多研究,大致可以归为2类:其一,结合基于视觉、触觉、肌肉神经等感知信号的人机交互技术的特殊性能,能提高遥操作机器人系统的工作效率和控制精度[15-17];其二,针对性地研究开发人机遥操作控制模式,充分发挥人类操作者与机器人各自的优势,在缓解人类操作者疲倦的同时提高系统的灵敏度、精确度,实现人机任务合理配置[18-19]. 目前,遥操作技术研究的相关综述侧重于人机交互技术的应用和人机交互下的共享控制系统发展,对于遥操作技术和控制策略的研究现状还未有详细的总结性报道[20].本研究概述遥操作机器人技术——临场感技术,分析其主要优势和应用特点;结合遥操作临场感技术对不同类型的遥操作机器人的共享控制策略进行总结,归纳出3个关键研究方面;着重对遥操作共享控制的未来发展进行探究,旨在为后续研究人员提供一定的参考.1 临场感技术在实际应用中普适性最高的技术是临场感技术(telepresence),主要可以分为2种:力反馈技术和虚拟现实技术. 两者的作用都是为了提高人类操作者遥操作过程的临场感能力. 作为新一代遥操作机器人系统的重要组成部分,临场感的核心理念在于为人类操作者提供身临现场的浸入式感官辅助,从而显著提高遥操作机器人完成复杂作业任务的效率[21].2006年Hokayem等[22]对临场感技术进行了相关综述. 宋爱国等[23-26]对相关领域进行了出色总结,自2013年起从4个方面对力觉临场感遥操作机器人进行了综述性分析. 综合考虑已有研究,临场感技术涵盖所有可以辅助提高人类操作者感知的方法,如触觉感知[27]、视觉感知[28]、脑机交互[29]等. 这些感知可以独立应用到机器人系统中,又可以通过互相配合提高系统多感知的能力,在环绕和避障任务的研究中很常见. 在遥操作应用中,以力反馈和虚拟现实为备受关注的研究热点.1.1 力反馈技术触觉感知的研究以临场感为代表. 触觉是许多遥操作机器人系统中不可缺少的一环,尤其在精度要求、控制安全要求高的场景. 力反馈技术832浙 江 大 学 学 报(工学版)第 55 卷是典型的临场感技术,其研究与应用更是与遥操作发展息息相关. 总而言之,现今的遥操作应用都包含力反馈内容,如图1所示为市场上较大众的力反馈设备.研究发现力反馈系统在克服时延影响方面发挥着重要的作用. 在面对低延迟时,利用波动变量和散射变换方法来解决[30-31]. 针对几秒或十多秒的通信延迟问题,Tanwani 等[32]提出模型预测的解决方法,根据设置的远程环境和机器人的几何和动力学模型,得到模拟视觉和实时的力反馈.在模型预测的基础上,Liang 等[33]提出人机协同半自主遥操作控制策略,不仅提高了操作精度,还可以减少操作人员的工作量. 结合模型预测和力反馈技术,王泓澈等[34]对大时延状态的带力反馈的主从式遥操作系统的控制器进行研究,通过单自由度力反馈遥操作系统的建模和分析,采用引入模型预测的方法对反馈力进行预测,减少时延对力反馈遥操作系统的操作性与稳定性的影响. 总的来说,利用力反馈预测可以在确保系统稳定的基础上削弱时延对系统性能的影响,并且有效提高遥操作系统的透明性和可操作性[35].因此,引入力反馈技术可以加强系统的抗干扰性. 张建军等[36]基于力反馈技术提出双边自适应阻抗控制,解决存在的机械手关节摩擦以及外部不确定干扰引起的模型不确定的问题. 甚至有的研究是将力反馈混合控制,达到提高主从异构型遥操作系统的稳定性和安全性的目的[37]. 相关的研究还包括如何减少主从两端干扰、误差影响方面研究.显而易见,力反馈技术并不限于提升机器人操作者的临场感知能力,在降低时延以及克服外在干扰方面也扮演着重要角色,还能优化系统安全性,更好地完成遥操作任务,减轻操作者工作负担.1.2 虚拟现实技术虚拟现实技术(virtual reality ,VR)是改善遥操作机器人工作效率的技术,作为提升临场感的关键技术,在遥操作的研究中占有较大比重. 虚拟现实技术是目前被认可的可以彻底解决网络时延问题最有效的方法,并在遥操作应用中得到证明[38].虚拟现实技术根据实际性能特点可以分为2种:虚拟环境技术和虚拟夹具技术. 前者是构建一个与从端类似的三维虚拟环境,从而避免主从通讯延迟引起的消极影响;后者在从端建立虚拟约束,既解决遥操作模式下的不足之处(如可视环境狭窄、延迟易导致反馈信息缺失),又能引导人类操作者实现避障、跟踪、路径优化等任务,提高工作效率和引导精度.虚拟环境能够在主端模拟一个与从端类似的三维虚拟环境,该环境容纳预设信息与从端反馈的传感器信息,使得全端与从端环境达到完全一致. 因此,在遥操作过程中,操作者可以直接通过人机交互设备与虚拟现实环境进行交互,能够实时产生视觉、听觉、触觉、力觉等感知,同时交互指令也可以被同步发送到从端,从而忽略时延干扰,达到真正的无时延交互的目的[39].虚拟夹具根据构型以及引导特性进行分类,虚拟夹具可以分为刚性、柔性虚拟夹具,前者在辅助机械臂的运动中具有引导速度快、引导精度高的优点;后者则更适应于处理空间复杂问题[40].刚性虚拟夹具构建方法主要有:基于点结构、基于线结构[41]、基于曲面结构[42]、基于几何体结构[43]和基于点云结构[44]等,它们的特点在于夹具的构型各不相同. Rosenberg [45]最早提出应用于遥操作手术、空间维护领域的虚拟夹具技术,在虚拟空间构建类似机械刚性夹具的约束,实现基础的人机共享操作,成功解决遥操作系统中的环境交互问题. 随着相关研究的不断深入,柔性虚拟约束也被广泛研究. 科研人员利用虚拟场分别构建作业对象及环境,构建对机器人的虚拟吸引力、虚拟排斥力,并通过力反馈设备实现虚拟夹具/约束[46].2 基于临场感的共享控制策略研究传统的遥操作技术本身具有一定的人机协作/协商/共享的特性,“共享”的概念既体现在遥操作控Omega SigmaLambda Delta图 1 常见力反馈设备Fig.1 Common force feedback devices第 5 期陈英龙, 等:基于临场感的遥操作机器人共享控制研究综述[J]. 浙江大学学报:工学版,2021, 55(5): 831–842.833制中,又体现在人机交互的过程中. 临场感加深了这个概念层次的表现,而基于此的共享控制策略更是被誉为带有鲜明的人机共享特色的控制模式. 这2种技术均为遥操作技术的重要组成部分,两者的融合能够提升遥操作机器人系统共享效果,是目前的研究热点和趋势.2.1 共享控制策略的发展遥操作机器人研发至今,其控制性能一直受时滞、环境反馈、人机交互方案低效等因素的影响.为了解决这些限制,国外很早就对共享控制展开研究,主要是作为研究设计较为直观的机器人遥操作系统的一种方法. 共享控制的概念最早是Sheridan[47]提出的,含义是指人、自主控制系统之间进行协调,共同对远端的机器人进行控制的控制策略. Sheridan[47]将共享控制方法引入机器人领域,机器人的不同自由度分别由手动和自动方式进行控制,人机各自完成任务,能够减轻操作员的负担,提高工作效率,并确保机器人控制的安全性、可靠性和稳定性. 该概念源于“遥操作”和“机器人”两者的有机结合,也就是说,机器人既能在遥操作下运行,也能在自主控制下运行[48].如图2所示,遥操作机器人控制方式主要为完全手动、半自主和全自主3种. 其中,完全手动控制因连续死板的低级操作而不被提倡,全自主控制由于安全隐患又不太现实. 因此,半自主控制成为当前遥操作机器人的主要控制方式和研究热点[49]. 不难看出,遥操作半自主控制与临场感之间的关系是互补的,通过虚拟现实技术和感知反馈技术,遥操作机器人系统实现了深度共享,在加深操作者浸入感的同时提高人机共享的程度.根据人机任务分配大小,常用的半自主控制主要有直接控制、监督控制和共享控制,如图3所示. 在直接控制中,从端完全跟随主端运动,所有决策都由操作者完成;在共享控制与监督控制中,它们的典型特征是2个控制环节:不包含操作者的远端控制环(内环)和包含操作者的整个系统控制环(外环). 图中,实线和虚线表示控制智能分配规模的程度,实线表示连通,虚线表示部分连通. 监督控制的特点是操作者不参与底层控制,只在上层监督;共享控制通过人机共享,实现高级决策(操作者)和底层动作(机器人)相结合的控制方式. 共享控制既具备直接控制和监督控制的优势,又避开了两者的不足之处[50],表现如下. 1)根据系统的任务环境的即时信息,操作者可以如直接控制一般,利用自身感知、决策能力,通过人的智能实现高适应性,进而提高系统的安全性,避免自主控制误判失误操作引起的隐患. 2)也能和监督控制一样,将时延排除在底层控制回路之外,从而在局部获得较高的稳定性和控制精度.此外,在时延环节施加时延控制方法,能克服时延对遥操作系统稳定性和透明性的影响[51]. 3)引入协商操作机制,将机器人机械装置的精确控制能力与操作者的宏观决策能力集成起来,实现对机器人的高精度控制[52]. 尤其在高控制精度要求的遥操作场所,共享控制既可以利用机器人自主精细控制,又能发挥出操作者的引导判断能力.共享控制策略强调遥操作机器人系统的自主能力存在一定的局限性,故应当发挥操作人员智能水平,以达到操作者与机器人智能水平的平衡.具体操作是将协商操作机制引入该模型之中,即从端尽可能发挥其自主规划能力. 为了保证操作图 2 遥操作主要技术概述Fig.2 Overview of teleoperation techniques图 3 遥操作机器人控制模式Fig.3 Control mode of teleoperation robot834浙 江 大 学 学 报(工学版)第 55 卷执行的有效性,在从端执行具体动作之前,应向主端操作者提交即将执行的方案,且须经过主端操作者确认[53].共享控制也可以被理解为控制状态的角色切换,如“人主机辅”或者“人辅机主”,然而共享控制的协商机制是各不相同的. 王兴华等[54]提出基于行为的自主/遥控水下机器人(autonomous un-derwater vehicle ,AUV )共享控制方法,通过设计的基于优先级的行为组织和融合方法,实现水下机器人以“人主机辅”模式执行环境探索,继而以“人辅机主”模式执行目标观察过程的有效共享.2.2 基于临场感的共享控制策略的研究方法在早期的共享控制策略中,人类操作员实际上只负责将高水平、直观的目标传递给机器人,由自主控制器将这些目标转换为运动指令,使得操作人员和自主控制器之间机器人系统的共享成为可能. 因此,如何实现人工操作者和自主控制器之间的角色划分,在很大程度上取决于任务本身、机器人系统和应用.C T C H C C C fe 如图4所示为传统的基于临场感的共享控制策略框架. 图中,、、分别为任务指令、人类指令和机器人指令;为反馈信息,既可以表示传感器反馈信息,也可以是人类操作者获取的信息.共享控制涉及了2个关键问题:1)什么时候应该混合使用这2个命令,使得遥操作指令与独立控制指令有效结合;2)如何修改每个命令. 因此,共享控制策略的核心内容可以分为两部分:1)选择/设计自主计划/控制方法(任务规划);2)选择/设计控制方案(控制策略算法).近年来遥操作的共享控制策略相关研究,与遥操作临场感技术——力反馈技术和虚拟现实技术紧密相关. 根据临场感技术和控制策略的实现原理,共享控制策略研究方法被分类归纳为以下3个方面:触觉反馈与引导(tactile feedback andguidance ,TFG )、运动学规避限制(kinematic avoid-ance constraint ,KAC )和共享因子分配(shared factor assignment ,SFC ),分析结果如表1所示.可以看出,大部分研究具有鲜明的针对性、专一性和应用性,往往都是对于某个类型遥操作机器人或者机器人系统设计或开发的一套共享控制策略算法. 然而,这三者之间其实是相辅相成的,事实上没有割裂独立,都与遥操作关键技术有联系,只是所侧重的研究方向不同. 体现出共享控制策略的研究范畴还是较大的,均涉及到上述的遥操作临场感技术.2.2.1 基于触觉反馈与引导 恰如骑马的这个比喻[74],触觉共享控制能够给操作者提供更加直观的感知能力,使其能够更好地了解从端空间操作情况. 结合触觉反馈,当操作员远离任何物体时,只能收到关于存在不安全运动学构型的触觉反馈——关节极限和奇点;当目标在预先定义的距离内时,操作者则开始收到触觉提示,被引导做出最优姿态[75]. 换言之,触觉反馈可以近似为一个运动学约束,操作者则被提供类似动觉和振动的触觉反馈.甚至,若这些反馈引导操作者一个抓握的姿势,则只提供动觉反馈[76].总而言之,触觉共享控制的表现形式可以理解为在操作空间内给予从端机器人移动的指示信息(如禁区或禁行区),操作者根据机器人的指示信息改变移动指令. 如图5所示[77]为解决核环境下物体抓取的典型的触觉共享控制策略框图. 通过视觉反馈对点云(场景)进行抓握引导,同时操作者通过动觉反馈重新修正输入(重构). 基于触觉的共享控制策略解决了多目标触觉引导问题,可以在不依赖概率估计或意图识别模型的情况下,确保平滑连续的目标抓取引导.除此之外,基于触觉的共享控制策略还能通过计算位姿极限或者奇异点的代价函数代替直接提供移动的提示指令,从而计算出最佳位姿以及施加在操作者手上的力信号. 基于此,Selvaggio 等[78]提出触觉引导的共享控制方法,解决在微创外科机器人执行缝合任务时,外科医生由于配置奇异点和关节限制而重新抓针的问题. 在整个触觉共享过程中被机器人告知最佳的抓取姿态/路线,操作者则最终控制机器人并做出决策选择何种抓取姿态/路线,从而考虑到其他非结构目标,避免不必要的操作,提高执行效率.除了上述触觉共享控制的研究外,Mario 等[79]图 4 基于临场感的共享控制框架Fig.4 Shared control framework based on presence第 5 期陈英龙, 等:基于临场感的遥操作机器人共享控制研究综述[J]. 浙江大学学报:工学版,2021, 55(5): 831–842.835将触觉引导与双边共享控制算法相结合,设计了基于触觉的人与机器人、机器人与环境的双边共享控制策略. 通过人机共享和双臂协调,在方向控制和避碰上进一步简化抓取任务的执行,使得人机的优势都能得以充分利用. 一些研究则通过融合人工力场(artificial force field,AFF)和虚拟阻抗力场(virtual impedance force field,VIF),建立操作者、机器人及环境的交互界面. 相关研究[80]已经证明在遥操作过程中基于触觉的双边共享能够更好地应对复杂可变的操作空间,且可处理突发情况更广.综上考虑,从控制末端执行器的操作人员的角度来说,基于触觉的共享控制策略将远程机械手转向所需的目标位姿变为一项相当简单的任务. 主要体现为:1)既解决2个位置的复杂性问题,还调节了方向;2)解决若干约束条件(例如碰撞、关节极限、奇点)下对操作人员机动灵活性的限制(操作人员可以有直接或直观的意识);3)不仅适应于静态的工作环境,也适用于动态的有障碍的环境.2.2.2 基于运动学限制规避 最近,在协作机器人研究中,运动学限制规避已经被成熟地用来改善性能和进行直观的物理人机交互. 在机器人遥操作中,这种方法也是通用的. 须解决的问题是:在不提供高保真的触觉反馈条件下,能够反映从端与环境之间的实际物理接触,而且为人类操作者表 1 共享控制策略研究简要汇总Tab.1 Brief summary of research on shared control strategy文献应用场景TFG KAC SFA研究特点[55]轨迹规划*权重由操作者当前输入动作和目标物体的距离决定[56]椎弓根螺钉固定手术**外科医生可以直接控制攻丝轴上的相互作用力/扭矩,而不会降低其他方向上的位置精度[57]远程操作热线工作**操作者和自主运动规划器共同生成笛卡尔任务轨迹[58]复杂环境避障、导航**考虑机器人与障碍物之间的距离,从而分别确定柔性控制器和导航控制器合适的合作权值[59]核电站高位重水更换*操作员仅控制从属机器人,而抑振任务分配给机器人系统[60]微创手术(MIS)*外科医生全程控制工具的位置,并得到系统的支持,即外科医生感觉到力,但同时不阻碍或影响手术过程[61]六足机器人爬梯**操作者和自主控制器的命令交由共享控制器中的控制权重函数进行处理[62]机器人避障**以稳定裕度与稳定裕度变化率为输入,共享因子为输出的模糊控制器,实现变权重共享控制[63]空间远程操作**根据操作员和自主控制模块的作用大小取加权融合[64]双臂协同**2名操作者通过优势因子调节各操作者的控制权重[65]无人机飞行任务**融合人主动操作和机器人自主运动的共享控制策略,使得机器人的控制权限可以在人和机器人之间平滑转移[66]辅助避障**人的权重和机器人的权重是分别受不同因素影响的[67]动态工作空间搬运*分别研究共享控制中提高机器人自主运动能力和辅助操作者提高操作能力的方法[68]ATRV机器人**遥操作系统允许人类扩展他们的物理能力,使他们能够干预危险操作或在他们不可能存在的地方[69]QBot机器人移动**同时考虑机器人的自主性和人的干预,通过阻抗和导纳模型保证从人的操作到机器人运动的无源性[70]手术教学引导**外科医生之间共享的控制权限是根据他们相对水平的手术技能和经验来选择的[71]非结构环境的探索***不仅根据给定环境上下文,而且根据用户当前行为的上下文来调节共享控制器提供的辅助水平[72]自由飞行太空机器人(FFSR)**将地面操作员的决策能力与空间机器人的自主能力有效地结合起来实现对目标更有效的捕获[73]微创外科手术(RMIS)**人工势场结合虚拟代理点,限制机器人执行机构的运动836浙 江 大 学 学 报(工学版)第 55 卷。
基于Internet力觉临场感遥操作机器人系统的研究

基于Internet⼒觉临场感遥操作机器⼈系统的研究【40】第28卷第11期2006-11基于Internet⼒觉临场感遥操作机器⼈系统的研究郭晓波, 宋爱国(东南⼤学仪器科学与⼯程系, 江苏南京 210096)摘要:虽然Internet技术扩⼤了遥操作机器⼈系统的应⽤范围,同时也带来了新的问题——时延。
针对不同性质的时延本⽂综述了基于Internet⼒觉临场感遥操作机器⼈系统的国内外发展状况、系统构成以及为解决时延问题提出的遥操作系统的主要控制⽅法并指出了各⽅法的优缺点,最后展望了其发展前景。
关键词:Internet;遥操作;机器⼈;时延中图分类号:TP242⽂献标识码:A⽂章编号:1009-0134(2006)11-0040-06Research on Internet-based force reflecting telerobot systemGUO Xiao-bo, SONG Ai-guo(Department of Instrument Science and Engineering, Southeast University, Nanjing 210096, China)Abstract: Recently Internet technique not only enlarged telerobot systems’ application but also bro-ught time delay a new problem. For the new problem, this paper describes presentresearch status, architecture of Internet-based force reflecting telerobot system andits main control method and theories. Finally its developing prospects are forecasted.Key words:Internet; teleoperation; robot; time delay收稿⽇期:2006-06-27基⾦项⽬:国家⾃然科学基⾦(60475034);霍英东教育基⾦(91055)作者简介:郭晓波(1976-),男,河南安阳⼈,在读博⼠⽣,研究⽅向为基于⽹络遥操作机器⼈技术。
基于虚拟现实的力觉临场感遥操作研究

如感知信息的精度和实时性、遥控机器人的稳定性和适应性以及人机交互的 直观性和自然性等。
本次演示采用的研究方法是构建一个基于力觉和视觉临场感的遥操作机器人 系统,并对其进行实验验证。首先,我们构建了一个遥控机器人平台,该平台包 括机器人本体、传感器、控制器和通信模块等。然后,我们设计了一种新型的力 觉和视觉临场感
并能够感知到机器人的动作、力度等信息,从而实现对目标对象的精准操作。 本次演示将对力觉临场感遥操作机器人技术的发展与现状进行详细阐述。
综述
力觉临场感遥操作机器人技术的发展历程可以追溯到20世纪末。在这个过程 中,研究者们不断优化技术方案,提高系统的稳定性和可靠性。力觉临场感遥操 作机器人技术的优点主要包括:1)能够远距离操作,避免操作者暴露在危险环 境中;2)
三、临场感遥操作机器人的设计 与制作流程
临场感遥操作机器人的设计与制作流程主要包括以下几个方面: 1、确定应用场景和任务需求,例如医疗手术、军事侦察或工业操作等;
2、设计机器人的机械结构和运动系统,包括移动平台、手臂和传感器等; 3、选择合适的计算机硬件和软件,例如处理器、摄像头、无线通信模块等;
二、临场感遥操作机器人的研究 现状和趋势
目前,国内外研究者已经研制出多种不同类型的临场感遥操作机器人,例如 医用手术机器人、军事侦察机器人、工业操作机器人等。研究内容主要包括操作 者与机器人的交互方式、通信协议和数据传输速率等方面。未来的研究趋势将集 中在提高操作者
的舒适度、降低延迟和提高机器人的自主性等方面。
此外,降低系统成本也是未来发展的重要方向,这将使得力觉临场感遥操作 机器人技术更加普及化。
结论
本次演示对力觉临场感遥操作机器人技术的发展与现状进行了详细阐述。通 过综述其优点、不足以及分析目前市场上的主流产品和技术原理,结合应用案例 和未来展望,可以得出以下结论:力觉临场感遥操作机器人技术具有广泛的应用 前景和重要性,
基于视觉临场感

统原理如图5 所示 .
一 74 4一
队
图5
具体工作 过程为:
① 媒 M M跟 VA 的 、 频、 频同 作 多 体卡 l r 随 G 点频 行 场 步工 . 和 卡 ( I M将 路 像 Vd 信号 I 转 R ) G r 号 两 摄 机的 i o V r 成(BI R ) . I r M 和 e 和V G 和(B 信 ③ VA 的 同 信 V作 选 关 将(BI G : 场 步 号 f 为 通开 , R ) R ) 交 成 体 以 G卡 G 和(B 分时 替 生
- 7 .一 42
图3
.
3 通信协议的 . 3 设计和控制软件的改造 在遥操作系统中, 通信是一个非常 关键的问题, 因为通信质 量和通信时延是影 响系统性能的一个关键因素.为了 人手部运动位姿 量测系统和机器人控制器之间顺 利的 通信, 定了简单而有效的通信协议. 议规定, 制 协 所有相互之间的数据通 信都以 数据包形式进行, 数据包有固定的格式. 通信软件可分为两 分别由二个 层, 模块来完 成, 其中一个模块完成通信初始化工作, 另一个模块完成通 信功能, 2 每 0毫秒接受 量测系统送来的一组数据.
遥操作系统中力反馈研究与实现

遥操作系统中力反馈研究与实现
赵迪;付艳;李世其;朱文革;李明富
【期刊名称】《自动化与仪表》
【年(卷),期】2008(23)9
【摘要】力反馈的研究与实现是遥操作系统研究的重要内容之一.该文设计了一种带力反馈的主从式遥操作系统.在系统中提出以虚拟手指空间位姿代替实际力作用线方向上位移的计算和基于实际材料的虚拟力外推的方法.该方法以虚拟手指的住姿来计算虚拟力,以实验所得实际材料的数据作为索引进行虚拟力的外推.实验结果表明,和以往的考虑力和变形关系的力反馈研究相比.此力反馈系统不仅简单易行,同时保证了较高的精度和刷新率.
【总页数】4页(P1-4)
【作者】赵迪;付艳;李世其;朱文革;李明富
【作者单位】华中科技大学,机械科学与工程学院,武汉430074;华中科技大学,机械科学与工程学院,武汉430074;华中科技大学,机械科学与工程学院,武汉430074;华中科技大学,机械科学与工程学院,武汉430074;华中科技大学,机械科学与工程学院,武汉430074
【正文语种】中文
【中图分类】TP217
【相关文献】
1.力反馈遥操作系统中的在线环境参数辨识研究 [J], 丁宇堃;宋荆洲;尚志豪;韩亮亮
2.基于力反馈摇杆的移动机器人遥操作系统的研究 [J], 崔岩;杨海伟;崔泽
3.面向高空幕墙安装的力反馈遥操作系统研究 [J], 颜晗;董跃巍;李铁军
4.基于散射矩阵的时延力反馈遥操作系统稳定性研究 [J], 王春絮;李立鹏
5.基于动力学辨识的机器人力反馈遥操作系统研究 [J], 齐付普
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
收稿日期:2002-11-04作者简介:费树岷(1961-),男,安徽宣城人,东南大学教授,博士生导师,主要从事机器人控制技术,非线性控制系统分析与综合,鲁棒控制,自适应控制,时滞系统的设计与综合等方面的教学与科研工作;宋爱国(1968-),男,教授,博士生导师。
2003年1月第10卷第1期控制工程Control Engineering of China Jan .2003Vol.10,No.1文章编号:167127848(2003)0120011204力觉临场感遥操作系统的研究进展费树岷1,陈启宏1,宋爱国2(11东南大学自动化所,江苏南京 210096;21东南大学仪器科学与工程系,江苏南京 210096)摘 要:力觉临场感遥操作机器人系统是一种新型的机器人控制系统,目前研究中系统存在的控制通信时延是严重影响系统的操作性能、甚至使系统不稳定的主要原因之一。
当利用Internet 网络传输信号时,时延是时变的、不确定的,对系统的影响更为明显。
因此意在介绍国内外力觉临场感遥操作机器人系统的发展状况以及在克服时延对系统影响方面所取得的最新研究进展,同时指出研究中存在的问题,及对进一步研究提出一些看法。
关 键 词:力觉临场感;遥操作;时延;Internet ;操作性能中图分类号:TP 242 文献标识码:A1 引 言遥操作机器人系统是指操作者对本地主机械手进行操作,远地从机械手跟踪主手的运动,从而完成远程复杂或危险环境下的任务。
在过去的几十年中,遥操作系统受到了越来越广泛的关注和研究。
特别是近几年来,随着计算机网络技术的飞跃发展,给交互式远程遥操作机器人技术提供了广阔的应用空间。
所谓交互技术包括机器人与人的交互和机器人与环境的交互。
前者的意义在于可由人去实现机器人在未知或非确定环境中难以做到的规划和决策;而后者的意义在于可由机器人去完成人所不能到达的恶劣环境或远距离环境中的作业任务。
临场感(Telepresence )技术是交互技术的核心。
它一方面将本地操作者的位置和运动信息(身体、四肢、头部、眼球等)作为控制指令传递给远地的机器人,另一方面将远地机器人感知到的环境信息以及机器人和环境的相互作用信息(视觉的、听觉的、力觉和触觉的)实时地反馈给本地操作者,使操作者产生身临其境的感受,机器人仿佛是操作者肢体在远地的延伸,从而操作者能够真实地感受到机器人和环境的交互状况,正确地决策,有效地控制机器人完成复杂的任务。
具有临场感的遥操作机器人系统的实现,将极大地改善遥操作机器人的作业能力,人们可以将自己的智慧和技术同遥操作机器人的适应能力相结合而完成有害环境或远距离下的作业任务,如空间探索、海洋开发、远程医疗、远程实验等。
正是鉴于临场感遥操作机器人的重大意义和广阔应用前景,美、日和西欧各国竞相开发相关的技术。
我国863计划中,自动化领域智能机器人主题以及航天领域空间机器人专题均将临场感遥操作机器人技术列为关键技术加以研究。
东南大学等几所大学分别于1993年先后开始对临场感遥操作机器人技术的理论和应用进行了研究。
在空间、海洋等远距离作业中,远地机器人(或从手)端与本地操作者之间的信号传输,其时延的大小通常可达015~10s 。
随着深海无缆机器人作业深度的增加,以及空间机器人探索范围的扩大,其信号传输时延也越来越大,甚至可达30s 以上。
我国拟研制的月球探索机器人由于带宽和物理距离的关系,所造成的通讯信号传输时延预计有1min 左右。
而基于Internet 通讯方式的遥操作机器人系统则由于网络带宽和网络传输协议的局限性,其信号传输时延不仅大而且时延大小呈随机性、不确定性,同时还会出现信号数据丢失的不良情形,严重影响交互式遥操作机器人系统的工作性能,甚至会造成系统的工作不稳定。
所以,研究如何减少时延对系统的影响具有十分重要的意义。
2 问题的提出力觉临场感遥操作机器人系统的结构如图1所示,它由操作者、主机械手(主手)、通讯环节、从机械手(从手)及环境构成。
操作者的任务或动作指令通过主机械手、通讯环节和从机械手作用于环境,而环境对从机械手的作用力及环境信息则经过上述环节反向传输到操作者手部。
在力觉临场感的理想状态下,从机械手工作稳定,从手的速度等于主手的速度,人手受力等于环境对从手的作用力。
即v m =v d ,f dm =f ds 。
然而,由于时延(假定时延时不变)的存在,v d (t )=v m (T 1-T 1),f dm (t )=f ds (T 1-T 2),其中T 1为前向传输时延,T 2为反向时延。
6,≅,≅>,6>6&≅>&≅!6!环境从机械手通讯环节主机械手操作者图1 力觉临场感系统的构成 图1所示的力觉临场感遥操作机器人系统动力学模型可表述为主机械手:f h =M m v m +B m v m +f dm (1)从机械手:f ds =M s v s +B s v s +f s (2)通讯环节:v d (t )=v m (t -T R ),f dm =f ds (t -T L )(3)环境:f e =M e v s +B e v s +K e ∫v s d t , f e =f s(4)式中,M ,B ,K 分别表示质量、阻尼和弹性系数;下标m ,s ,e 分别表示主机械手、从机械手和环境;v m ,v s 表示主、从手速度。
f ds (t )是由主、从机械手的速度、位置差构成的对从机械手的驱动力,为述说简单起见,通常取为与速度差、位置差成正比,即f ds (t )=B c (v m (t )-v s (t ))+ K c (x m (t )-x s (t ))(5)式中,x m ,x s 表示主、从手位移;B c ,K c 为待定的速度、位移误差的增益。
由于时延的存在,主手当前接收到的信号是从手T L (t )时刻前的状态,而主手当前的控制信号T R (t )时刻后才能作用于从手,从而主手对从手的作用效果T L (t )+T R (t )时刻后才能反馈到主手端,这导致系统面临以下3个方面的问题。
①稳定性 Anderson 在文献[1]中指出,即使是微小的时延也可能导致系统不稳定,降低系统操作性能。
因此时延对系统的影响是一个待解决的关键问题。
系统的稳定性与环境模型息息相关,遥操作系统在空间计划、海底探测等的应用中,环境模型往往是时变的,甚至是非线性的。
由于时延的存在,难以建立环境准确的数学模型。
如果时延是随机的,其难度更大。
因此,时延条件下的环境建模是一个具有挑战性的问题。
②透明性 所谓系统的透明性,是指从机械手跟踪主机械手的位置和受力的准确性,真实的力觉反馈,让操作者感觉到好像在直接对环境进行操作,具有身临其境的感觉,它是遥操作系统一个很重要的指标。
研究遥操作系统的目的是使从机械手跟踪主手的运动,从而完成远程复杂或危险环境下的任务。
因此,由于时延(特别是时变时延)的存在,使得透明性的研究更为复杂化。
③Internet 时延特性分析 随着网络技术的飞速发展,Internet 逐渐被用到遥操作系统中,而Internet 时延不仅大,而且是时变的、随机的,导致整个系统的时变性和随机性,给控制带来了很大的困难。
所以,研究Internet 的时延特性具有重要意义。
3 研究进展由以上分析可知,对遥操作系统进行设计不仅要保证系统的稳定性,还要保证良好的透明性。
对遥操作系统的控制方法的研究目前主要有3个主要的方向:双向控制、预见控制和远程规划。
双向控制,最早是针对小时延(2s 以下)的解决方法:“移动─等待”法。
这种方法实际上是以降低系统的工作效率为代价的,不仅造成了力反馈信息的模糊不清而且给操作者带来了很重的负担,且极易疲劳。
经过几十年的发展,学者们已提出了不少解决时延问题的方法,例如:1)时不变时延 1989年Anderson [2]利用散射算子分析法提出一种无源控制算法。
在无源的基础上,1991年Niemeyer [3]从能量传递的角度出发,提出了波变量控制算法。
1997年,宋爱国等[4]提出了一种基于有源阻抗匹配的无源控制算法,可以同时保证小时延下系统的稳定性和力觉临场感效果,并建立了单自由度主从式遥控机械手实验系统进行实验研究。
这些方法能保证系统在任何时延下的稳定性,但这是以降低系统的操作性能为代价的。
时延越大,系统性能越差。
1993年Lawrence [5]提出了一种四通道的控制结构,将主、从手的力、速度和加速度作为控制信号相互传递,该方案可以使系统具有近似透明・21・控 制 工 程 第10卷性,同时用Nyquist方法对闭环系统进行了鲁棒性分析。
只有当系统不存在时延时,四通道方法才能使系统具有完全的透明性。
然而,系统加速度不易检测,使得系统的实现较为困难。
2002年Hashtrudi2Zaad[6]用四通道的方法分析了系统的操作性能,并最终用三通道实现,但仍不能使系统达到最佳的(完全的)透明性。
前面两种算法都用到从手端反馈回来的信息,并不要求知道环境的先验知识。
1993年Sheridan[7]提出用Smith预估器预测从手状态的思想,在精确知道从手和环境模型的前提下,主手端用Smith预估器预测从手状态,在从手端用PD 控制器进行调节,可显著提高系统性能。
1997年G allegos[8]提出仅用系统位置和速度信息进行反馈,在状态空间下对系统进行设计,不需知道环境的精确模型,仅要求环境满足一定的条件,达到系统稳定性,并对系统的稳态跟踪误差进行了分析。
2)时变时延 时变时延下的遥操作系统控制设计较之时不变时延要困难得多,传统的控制方法并不能直接使用。
1996年K osuge等[9]提出了虚拟时延的概念,其核心思想是将主手端的信息加上时间戳,以固定周期发送到从手,在从手端加一个时延缓冲器,使得系统时延为定值,从而可以用定常时延的方法来对系统进行分析和设计。
1998年Niemeyer和Slotine[10]提出波变量积分思想,即在波变控制中,首先将波信号进行积分,然后传输到从手,在从手端用滤波器对积分信号进行重构,使得系统稳定。
Sano和Fujimoto[11]将H∞控制方法应用到遥操作系统中,视系统的时延为扰动,控制的目的是使系统对时变时延具有鲁棒稳定性,并通过主手端的阻抗对系统扰动进行归一化处理,控制器通过增益调度来实现。
时延快速变化时,可同样通过增益调度实现H∞控制器,从而获得良好的系统性能。
其缺陷是这种控制方法仅适用于时延小于1s的情况。
时延大于1s时,该算法不能保证系统的稳定性。
Brady 和Tarn[12]提出了一种新的基于Internet的遥操作机器人系统的控制结构,对Internet时延特性进行了分析,并提出了时间前向观测器的概念。