双三次插值及优化
双三次插值算法的C++实现与SSE指令优化
双三次插值算法的C++实现与SSE指令优化在上篇⽂章中,我们讲解了常见的最邻近插值算法、双线性插值算法和双三次插值算法的原理与实现,三种插值算法中双三次插值算法的插值效果最好,但其也是三种算法中计算复杂度最⾼、耗时最长的算法。
本⽂在给出双三次插值C++代码的基础上,着重讲解如何使⽤SSE指令来优化该算法,并使⽤双三次插值来实现图像的缩放,⽐较SSE指令优化前后的耗时。
1. 基于C++与Opencv的代码实现算法原理在上篇⽂章中已经讲了,此处直接贴出代码:float cubic_w_f(float x, float a){if (x <= 1){return 1 - (a + 3)*x*x + (a + 2)*x*x*x;}else if (x < 2){return -4 * a + 8 * a*x - 5 * a*x*x + a*x*x*x;}return 0.0;}void cal_cubic_coeff(float x, float y, float *coeff){float u = x - floor(x);float v = y - floor(y);u += 1;v += 1;float a = -0.15;float A[4];A[0] = cubic_w_f(abs(u), a);A[1] = cubic_w_f(abs(u - 1), a);A[2] = cubic_w_f(abs(u - 2), a);A[3] = cubic_w_f(abs(u - 3), a);for (int s = 0; s < 4; s++){float C = cubic_w_f(abs(v - s), a);coeff[s * 4] = A[0] * C;coeff[s * 4 + 1] = A[1] * C;coeff[s * 4 + 2] = A[2] * C;coeff[s * 4 + 3] = A[3] * C;}}uchar cubic_inner(Mat src, float x_float, float y_float, float a){float coeff[16];cal_cubic_coeff(x_float, y_float, coeff); //计算权重系数float sum = 0.0;int x0 = floor(x_float) - 1;int y0 = floor(y_float) - 1;for (int i = 0; i < 4; i++){for (int j = 0; j < 4; j++){sum += coeff[i * 4 + j] * src.ptr<uchar>(y0 + i)[x0 + j];}}return ((uchar)sum);}2. SSE指令优化算法⾸先,我们来看⼀下浮点型坐标点周围的4*4个整型点分别在x⽅向与y⽅向上与该浮点型坐标点的像素距离,假设浮点型坐标点的x坐标的⼩数部分为u,y坐标的⼩数部分为v,那么x⽅向与y⽅向上的距离如下图所⽰(每⼀格的像素距离为1)。
双三次插值的计算公式

双三次插值的计算公式双三次插值是一种常用的图像处理技术,它可以通过对图像进行插值来改善图像的质量。
在双三次插值中,我们使用一个3x3的像素块来计算新像素的值。
这个像素块中的每个像素都有一个权重,这些权重是根据像素的位置和距离来计算的。
下面是双三次插值的计算公式:f(x,y) = ∑i=0,1,2 ∑j=0,1,2 wi(x)wj(y)pi,j其中,f(x,y)是新像素的值,pi,j是像素块中的像素值,wi(x)和wj(y)是像素块中每个像素的权重。
这些权重是根据像素的位置和距离来计算的,具体的计算公式如下:wi(x) = si(x+1)si(x)si(x-1)wj(y) = sj(y+1)sj(y)sj(y-1)其中,si(x)和sj(y)是插值函数,它们的计算公式如下:si(x) = { 1-|x|³+2|x|²-|x|, |x|<1{ 4-8|x|³+5|x|²-|x|, 1≤|x|<2{ 0, |x|≥2sj(y)的计算公式与si(x)相同。
双三次插值的计算公式看起来比较复杂,但实际上它的原理很简单。
我们可以将像素块中的每个像素看作一个函数,然后使用插值函数来计算这些函数的权重。
最后,将这些权重乘以像素值,再将它们相加,就可以得到新像素的值。
双三次插值的优点是可以提高图像的清晰度和细节,但它也有一些缺点。
首先,它需要大量的计算,因此速度比较慢。
其次,它容易产生锯齿状的边缘效果,这是因为插值函数在边缘处的值比较大,导致像素值的变化比较剧烈。
双三次插值是一种常用的图像处理技术,它可以通过对图像进行插值来改善图像的质量。
虽然它有一些缺点,但在实际应用中仍然具有很大的价值。
曲面插值算法

曲面插值算法摘要:一、曲面插值算法简介1.概念解释2.应用背景二、常见的曲面插值算法1.线性插值2.二次插值3.三次插值4.多项式插值5.样条插值三、各类算法的优缺点分析1.线性插值2.二次插值3.三次插值4.多项式插值5.样条插值四、曲面插值算法的实际应用1.计算机图形学2.数值分析3.数据处理五、曲面插值算法的发展趋势与展望1.高阶插值算法的开发2.插值算法的优化与改进3.跨学科研究与应用正文:曲面插值算法是一种在计算机图形学、数值分析等领域广泛应用的技术。
通过该算法,可以在给定的一些点之间,根据一定的规律,计算出新的点,从而实现对曲面的精确表示与描绘。
本文将对曲面插值算法进行详细介绍,包括其基本概念、常见算法、优缺点分析、实际应用与发展趋势。
首先,我们需要了解曲面插值算法的概念。
曲面插值算法,顾名思义,是一种插值方法。
它根据给定的一些点,计算出这些点之间的新的点,从而实现对曲面的描绘。
这种方法可以用来填充曲面上的空洞,消除表面的不平滑现象,提高图形渲染的质量等。
接下来,我们将介绍几种常见的曲面插值算法。
首先是线性插值,它是最简单的插值方法,适用于平滑曲面的表示。
其次是二次插值,它的插值效果比线性插值更接近实际曲面,但计算复杂度较高。
然后是三次插值,它可以得到较高的插值精度,但计算复杂度也相应增加。
多次多项式插值和样条插值是另外两种常用的方法,它们在某些特定情况下具有较好的插值效果。
在了解了各种曲面插值算法之后,我们需要分析它们的优缺点。
线性插值虽然简单,但插值效果较差;二次插值和三次插值在某些情况下可以得到较好的插值效果,但计算复杂度较高;多项式插值和样条插值则具有较好的适应性和通用性,可以根据实际需求选择合适的插值方法。
曲面插值算法在实际应用中具有广泛的应用前景。
在计算机图形学领域,它被用来生成和渲染三维图形,提高图形质量;在数值分析领域,它被用来插值数据,提高计算精度和效率;在数据处理领域,它被用来填充数据空洞,提高数据的可视化效果。
DEM重采样中双三次样条曲线插值方法的应用

DEM重采样中双三次样条曲线插值⽅法的应⽤DEM重采样(Resample)可⽣成与原始格⽹不同空间分辨率的格⽹DEM,产⽣的结果运⽤在匹配遥感图象分辨率以⽣成三维地形场景,及建⽴细节层次模型(LOD)等⽅⾯。
在重采样的过程中,插值计算的⽅法有最近邻域、距离反转加权、双线性、B样条曲线和双三次样条曲线(Bicubic Spline Interpolation)等。
本⽂详细介绍最后⼀种⽅法。
1)在⽤户设置新的分辨率(即基础单元格⽹⼤⼩发⽣变化)后,插值⽣成的结果格⽹与原始格⽹保持不变的是,最⼩和最⼤XYZ轴数值,⽽单元⼤⼩变化导致格⽹的⾏数与列数重新计算。
2)对结果格⽹初始化后,逐⾏列进⾏每个单元的循环,仅仅差每个单元位置处的Z轴数值,此时以位置为参数(在两个格⽹之间是保持不变的),寻找原始格⽹此处的Z轴数值,此刻可在原始格⽹此位置的邻域运⽤各种插值算法确定这个未知数值。
3)接下来的⼯作,⾸先找到最接近此位置的单元格,然后确定此单元格邻域4X4的范围内16个元素的Z轴数值,以此位置与单元格的距离差和16个邻域数值为参数,采⽤双三次样条曲线插值⽅法计算未知数值。
double CGV3dDEMGrid::GetValAtPosBiCubicSpline(double dx, double dy, double z_xy[4][4]){double a0, a2, a3, b1, b2, b3, c[4];for(int i=0; i<4; i++){a0 = z_xy[0][i] - z_xy[1][i];a2 = z_xy[2][i] - z_xy[1][i];a3 = z_xy[3][i] - z_xy[1][i];b1 = -a0 / 3.0 + a2 - a3 / 6.0; //求解系数b2 = a0 / 2.0 + a2 / 2.0;b3 = -a0 / 6.0 - a2 / 2.0 + a3 / 6.0;c[i] = z_xy[1][i] + b1 * dx + b2 * dx*dx + b3 * dx*dx*dx; //记录系数}a0 = c[0] - c[1];a2 = c[2] - c[1];a3 = c[3] - c[1];b1 = -a0 / 3.0 + a2 - a3 / 6.0; //求解系数b2 = a0 / 2.0 + a2 / 2.0;b3 = -a0 / 6.0 - a2 / 2.0 + a3 / 6.0;return( c[1] + b1 * dy + b2 * dy*dy + b3 * dy*dy*dy );}附图:图1 10⽶分辨率重采样结果图图2 原始数据显⽰图(5⽶分辨率)图3 2.5⽶分辨率重采样结果图。
高质量的快速图像缩放——二次线性插值和三次卷积插值
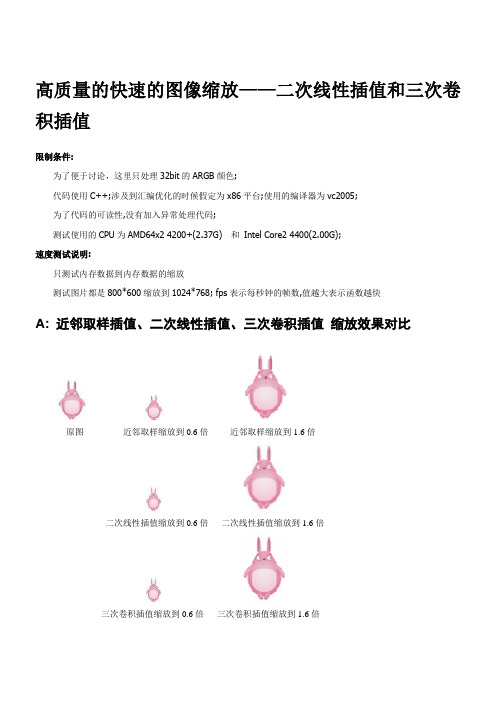
高质量的快速的图像缩放——二次线性插值和三次卷积插值限制条件:为了便于讨论,这里只处理32bit的ARGB颜色;代码使用C++;涉及到汇编优化的时候假定为x86平台;使用的编译器为vc2005;为了代码的可读性,没有加入异常处理代码;测试使用的CPU为AMD64x2 4200+(2.37G) 和Intel Core2 4400(2.00G);速度测试说明:只测试内存数据到内存数据的缩放测试图片都是800*600缩放到1024*768; fps表示每秒钟的帧数,值越大表示函数越快A: 近邻取样插值、二次线性插值、三次卷积插值缩放效果对比原图近邻取样缩放到0.6倍近邻取样缩放到1.6倍二次线性插值缩放到0.6倍二次线性插值缩放到1.6倍三次卷积插值缩放到0.6倍三次卷积插值缩放到1.6倍原图近邻取样缩放到8倍二次线性插值缩放到8倍三次卷积插值缩放到8倍二次线性插值(近似公式)近邻取样插值缩放简单、速度快,但很多时候缩放出的图片质量比较差(特别是对于人物、景色等),图片的缩放有比较明显的锯齿;使用二次或更高次插值有利于改善缩放效果;B: 首先定义图像数据结构:#define asm __asmtypedef unsigned char TUInt8; // [0..255]struct TARGB32 //32 bit color{TUInt8 b,g,r,a; //a is alpha};struct TPicRegion //一块颜色数据区的描述,便于参数传递{TARGB32* pdata; //颜色数据首地址long byte_width; //一行数据的物理宽度(字节宽度);//abs(byte_width)有可能大于等于width*sizeof(TARGB32);long width; //像素宽度long height; //像素高度};//那么访问一个点的函数可以写为:inline TARGB32& Pixels(const TPicRegion& pic,const long x,const long y){return ( (TARGB32*)((TUInt8*)pic.pdata+pic.byte_width*y) )[x];}二次线性差值C: 二次线性插值缩放原理和公式图示:缩放后图片原图片(宽DW,高DH) (宽SW,高SH)缩放映射原理:(Sx-0)/(SW-0)=(Dx-0)/(DW-0) (Sy-0)/(SH-0)=(Dy-0)/(DH-0)=> Sx=Dx*SW/DW Sy=Dy*SH/DH聚焦看看(Sx,Sy)坐标点(Sx,Sy为浮点数)附近的情况;对于近邻取样插值的缩放算法,直接取Color0颜色作为缩放后点的颜色;二次线性插值需要考虑(Sx,Sy)坐标点周围的4个颜色值Color0\Color1\Color2\Color3,把(Sx,Sy)到A\B\C\D坐标点的距离作为系数来把4个颜色混合出缩放后点的颜色;(u=Sx-floor(Sx); v=Sy-floor(Sy); 说明:floor函数的返回值为小于等于参数的最大整数) 二次线性插值公式为:tmpColor0=Color0*(1-u) + Color2*u;tmpColor1=Color1*(1-u) + Color3*u;DstColor =tmpColor0*(1-v) + tmpColor2*v;展开公式为:pm0=(1-u)*(1-v);pm1=v*(1-u);pm2=u*(1-v);pm3=u*v;则颜色混合公式为:DstColor = Color0*pm0 + Color1*pm1 + Color2*pm2 + Color3*pm3;参数函数图示:二次线性插值函数图示对于上面的公式,它将图片向右下各移动了半个像素,需要对此做一个修正;=> Sx=(Dx+0.5)*SW/DW-0.5; Sy=(Dy+0.5)*SH/DH-0.5;而实际的程序,还需要考虑到边界(访问源图片可能超界)对于算法的影响,边界的处理可能有各种方案(不处理边界或边界回绕或边界饱和或边界映射或用背景颜色混合等;文章中默认使用边界饱和来处理超界);比如: 边界饱和函数://访问一个点的函数,(x,y)坐标可能超出图片边界; //边界处理模式:边界饱和inline TARGB32 Pixels_Bound(const TPicRegion& pic,long x,long y){//assert((pic.width>0)&&(pic.height>0));bool IsInPic=true;if (x<0) {x=0; IsInPic=false; }else if (x>=pic.width ) {x=pic.width -1; IsInPic=false; }if (y<0) {y=0; IsInPic=false; }else if (y>=pic.height) {y=pic.height-1; IsInPic=false; }TARGB32 result=Pixels(pic,x,y);if (!IsInPic) result.a=0;return result;}D: 二次线性插值缩放算法的一个参考实现:PicZoom_BilInear0该函数并没有做什么优化,只是一个简单的浮点实现版本;inline void Bilinear0(const TPicRegion& pic,float fx,float fy,TARGB32* result){long x=(long)fx; if (x>fx) --x; //x=floor(fx);long y=(long)fy; if (y>fy) --y; //y=floor(fy);TARGB32 Color0=Pixels_Bound(pic,x,y);TARGB32 Color2=Pixels_Bound(pic,x+1,y);TARGB32 Color1=Pixels_Bound(pic,x,y+1);TARGB32 Color3=Pixels_Bound(pic,x+1,y+1);float u=fx-x;float v=fy-y;float pm3=u*v;float pm2=u*(1-v);float pm1=v*(1-u);float pm0=(1-u)*(1-v);result->a=(pm0*Color0.a+pm1*Color1.a+pm2*Color2.a+pm3*Color3.a);result->r=(pm0*Color0.r+pm1*Color1.r+pm2*Color2.r+pm3*Color3.r);result->g=(pm0*Color0.g+pm1*Color1.g+pm2*Color2.g+pm3*Color3.g);result->b=(pm0*Color0.b+pm1*Color1.b+pm2*Color2.b+pm3*Color3.b);}void PicZoom_Bilinear0(const TPicRegion& Dst,const TPicRegion& Src){if ( (0==Dst.width)||(0==Dst.height)||(0==Src.width)||(0==Src.height)) return;unsigned long dst_width=Dst.width;TARGB32* pDstLine=Dst.pdata;for (unsigned long y=0;y<Dst.height;++y){float srcy=(y+0.4999999)*Src.height/Dst.height-0.5;for (unsigned long x=0;x<dst_width;++x){float srcx=(x+0.4999999)*Src.width/Dst.width-0.5;Bilinear0(Src,srcx,srcy,&pDstLine[x]);}((TUInt8*&)pDstLine)+=Dst.byte_width;}}//////////////////////////////////////////////////////////////////////////////// //速度测试://============================================================================== // PicZoom_BilInear0 8.3 fps//////////////////////////////////////////////////////////////////////////////// E: 浮点计算改为定点数实现:PicZoom_BilInear1inline void Bilinear1(const TPicRegion& pic,const long x_16,const long y_16,TARGB32* result){long x=x_16>>16;long y=y_16>>16;TARGB32 Color0=Pixels_Bound(pic,x,y);TARGB32 Color2=Pixels_Bound(pic,x+1,y);TARGB32 Color1=Pixels_Bound(pic,x,y+1);TARGB32 Color3=Pixels_Bound(pic,x+1,y+1);unsigned long u_8=(x_16 & 0xFFFF)>>8;unsigned long v_8=(y_16 & 0xFFFF)>>8;unsigned long pm3_16=(u_8*v_8);unsigned long pm2_16=(u_8*(unsigned long)(255-v_8));unsigned long pm1_16=(v_8*(unsigned long)(255-u_8));unsigned long pm0_16=((255-u_8)*(255-v_8));result->a=((pm0_16*Color0.a+pm1_16*Color1.a+pm2_16*Color2.a+pm3_16*Color3.a)>>16);result->r=((pm0_16*Color0.r+pm1_16*Color1.r+pm2_16*Color2.r+pm3_16*Color3.r)>>16);result->g=((pm0_16*Color0.g+pm1_16*Color1.g+pm2_16*Color2.g+pm3_16*Color3.g)>>16);result->b=((pm0_16*Color0.b+pm1_16*Color1.b+pm2_16*Color2.b+pm3_16*Color3.b)>>16);}void PicZoom_Bilinear1(const TPicRegion& Dst,const TPicRegion& Src){if ( (0==Dst.width)||(0==Dst.height)||(0==Src.width)||(0==Src.height)) return;long xrIntFloat_16=((Src.width)<<16)/Dst.width+1;long yrIntFloat_16=((Src.height)<<16)/Dst.height+1;const long csDErrorX=-(1<<15)+(xrIntFloat_16>>1);const long csDErrorY=-(1<<15)+(yrIntFloat_16>>1);unsigned long dst_width=Dst.width;TARGB32* pDstLine=Dst.pdata;long srcy_16=csDErrorY;long y;for (y=0;y<Dst.height;++y){long srcx_16=csDErrorX;for (unsigned long x=0;x<dst_width;++x){Bilinear1(Src,srcx_16,srcy_16,&pDstLine[x]); //bordersrcx_16+=xrIntFloat_16;}srcy_16+=yrIntFloat_16;((TUInt8*&)pDstLine)+=Dst.byte_width;}}//////////////////////////////////////////////////////////////////////////////////速度测试://==============================================================================// PicZoom_BilInear1 17.7 fps//////////////////////////////////////////////////////////////////////////////// F: 边界访问超界的问题二次线性插值需要考略边界访问超界的问题,我们可以将边界区域和内部区域分开处理,这样就可以优化内部的插值实现函数了:比如不需要判断访问超界、减少颜色数据复制、减少一些不必要的重复坐标计算等等inline void Bilinear2_Fast(TARGB32* PColor0,TARGB32* PColor1,unsigned long u_8,unsigned long v_8,TARGB32* result){unsigned long pm3_16=u_8*v_8;unsigned long pm2_16=(u_8<<8)-pm3_16;unsigned long pm1_16=(v_8<<8)-pm3_16;unsigned long pm0_16=(1<<16)-pm1_16-pm2_16-pm3_16;result->a=((pm0_16*PColor0[0].a+pm2_16*PColor0[1].a+pm1_16*PColor1[0].a+pm3_16*PColor1[1].a)>>16);result->r=((pm0_16*PColor0[0].r+pm2_16*PColor0[1].r+pm1_16*PColor1[0].r+pm3_16*PColor1[1].r)>>16);result->g=((pm0_16*PColor0[0].g+pm2_16*PColor0[1].g+pm1_16*PColor1[0].g+pm3_16*PColor1[1].g)>>16);result->b=((pm0_16*PColor0[0].b+pm2_16*PColor0[1].b+pm1_16*PColor1[0].b+pm3_16*PColor1[1].b)>>16);}inline void Bilinear2_Border(const TPicRegion& pic,const long x_16, const long y_16,TARGB32* result){long x=(x_16>>16);long y=(y_16>>16);unsigned long u_16=((unsigned short)(x_16));unsigned long v_16=((unsigned short)(y_16));TARGB32 pixel[4];pixel[0]=Pixels_Bound(pic,x,y);pixel[1]=Pixels_Bound(pic,x+1,y);pixel[2]=Pixels_Bound(pic,x,y+1);pixel[3]=Pixels_Bound(pic,x+1,y+1);Bilinear2_Fast(&pixel[0],&pixel[2],u_16>>8,v_16>>8,result);}void PicZoom_Bilinear2(const TPicRegion& Dst,const TPicRegion& Src){if ( (0==Dst.width)||(0==Dst.height)||(0==Src.width)||(0==Src.height)) return;long xrIntFloat_16=((Src.width)<<16)/Dst.width+1;long yrIntFloat_16=((Src.height)<<16)/Dst.height+1;const long csDErrorX=-(1<<15)+(xrIntFloat_16>>1);const long csDErrorY=-(1<<15)+(yrIntFloat_16>>1);unsigned long dst_width=Dst.width;//计算出需要特殊处理的边界long border_y0=-csDErrorY/yrIntFloat_16+1;//y0+y*yr>=0; y0=csDErrorY => y>=-csDErrorY/yrif (border_y0>=Dst.height) border_y0=Dst.height;long border_x0=-csDErrorX/xrIntFloat_16+1;if (border_x0>=Dst.width ) border_x0=Dst.width;long border_y1=(((Src.height-2)<<16)-csDErrorY)/yrIntFloat_16+1;//y0+y*yr<=(height-2) => y<=(height-2-csDErrorY)/yrif (border_y1<border_y0) border_y1=border_y0;long border_x1=(((Src.width-2)<<16)-csDErrorX)/xrIntFloat_16+1;if (border_x1<border_x0) border_x1=border_x0;TARGB32* pDstLine=Dst.pdata;long Src_byte_width=Src.byte_width;long srcy_16=csDErrorY;long y;for (y=0;y<border_y0;++y){long srcx_16=csDErrorX;for (unsigned long x=0;x<dst_width;++x){Bilinear2_Border(Src,srcx_16,srcy_16,&pDstLine[x]); //bordersrcx_16+=xrIntFloat_16;}srcy_16+=yrIntFloat_16;((TUInt8*&)pDstLine)+=Dst.byte_width;}for (y=border_y0;y<border_y1;++y){long srcx_16=csDErrorX;long x;for (x=0;x<border_x0;++x){Bilinear2_Border(Src,srcx_16,srcy_16,&pDstLine[x]);//bordersrcx_16+=xrIntFloat_16;}{unsigned long v_8=(srcy_16 & 0xFFFF)>>8;TARGB32* PSrcLineColor= (TARGB32*)((TUInt8*)(Src.pdata)+Src_byte_width*(srcy_16>>16)) ;for (unsigned long x=border_x0;x<border_x1;++x){TARGB32* PColor0=&PSrcLineColor[srcx_16>>16];TARGB32* PColor1=(TARGB32*)((TUInt8*)(PColor0)+Src_byte_width); Bilinear2_Fast(PColor0,PColor1,(srcx_16 & 0xFFFF)>>8,v_8,&pDstLine[x]);srcx_16+=xrIntFloat_16;}}for (x=border_x1;x<dst_width;++x){Bilinear2_Border(Src,srcx_16,srcy_16,&pDstLine[x]);//bordersrcx_16+=xrIntFloat_16;}srcy_16+=yrIntFloat_16;((TUInt8*&)pDstLine)+=Dst.byte_width;}for (y=border_y1;y<Dst.height;++y){long srcx_16=csDErrorX;for (unsigned long x=0;x<dst_width;++x){Bilinear2_Border(Src,srcx_16,srcy_16,&pDstLine[x]); //bordersrcx_16+=xrIntFloat_16;}srcy_16+=yrIntFloat_16;((TUInt8*&)pDstLine)+=Dst.byte_width;}}//////////////////////////////////////////////////////////////////////////////////速度测试://==============================================================================// PicZoom_BilInear2 43.4 fps////////////////////////////////////////////////////////////////////////////////F' 补充: 二次线性插值(近似公式)如果不想处理边界访问超界问题,可以考虑扩大源图片的尺寸,加一个边框(“哨兵”优化);这样插值算法就不用考虑边界问题了,程序写起来也简单很多!如果对缩放结果的边界像素级精度要求不是太高,我还有一个方案,一个稍微改变的缩放公式:Sx=Dx*(SW-1)/DW;Sy=Dy*(SH-1)/DH;(源图片宽和高:SW>=2;SH>=2)证明这个公式不会造成内存访问超界:要求Dx=DW-1时: sx+1=int( (dw-1)/dw*(dw-1) ) +1 <= (sw-1)有: int( (sw-1)*(dw-1)/dw ) <=sw-2(sw-1)*(dw-1)/dw <(sw-1)(dw-1) /dw<1(dw-1) <dw比如,按这个公式的一个简单实现: (缩放效果见前面的"二次线性插值(近似公式)"图示)void PicZoom_ftBilinear_Common(const TPicRegion& Dst,const TPicRegion& Src){if ( (0==Dst.width)||(0==Dst.height)||(2>Src.width)||(2>Src.height)) return;long xrIntFloat_16=((Src.width-1)<<16)/Dst.width;long yrIntFloat_16=((Src.height-1)<<16)/Dst.height;unsigned long dst_width=Dst.width;long Src_byte_width=Src.byte_width;TARGB32* pDstLine=Dst.pdata;long srcy_16=0;for (unsigned long y=0;y<Dst.height;++y){unsigned long v_8=(srcy_16 & 0xFFFF)>>8;TARGB32* PSrcLineColor= (TARGB32*)((TUInt8*)(Src.pdata)+Src_byte_width*(srcy_16>>16)) ;long srcx_16=0;for (unsigned long x=0;x<dst_width;++x){TARGB32* PColor0=&PSrcLineColor[srcx_16>>16];Bilinear_Fast_Common(PColor0,(TARGB32*)((TUInt8*)(PColor0)+Src_byte_width),(srcx_16 & 0xFFFF)>>8,v_8,&pDstLine[x]);srcx_16+=xrIntFloat_16;}srcy_16+=yrIntFloat_16;((TUInt8*&)pDstLine)+=Dst.byte_width;}}G: 模拟单指令多数据处理利用单指令多数据处理的MMX指令一般都可以加快颜色的运算;在使用MMX改写之前,利用32bit寄存器(或变量)来模拟单指令多数据处理;数据储存原理:一个颜色数据分量只有一个字节,用2个字节来储存单个颜色分量的计算结果,对于很多颜色计算来说精度就够了;那么一个32bit寄存器(或变量)就可以储存2个计算出的临时颜色分量;从而达到了单个指令两路数据处理的目的;单个指令两路数据处理的计算:乘法:((0x00AA*a)<<16) | (0x00BB*a) = 0x00AA00BB * a可见只要保证0x00AA*a和0x00BB*a都小于(1<<16)那么乘法可以直接使用无符号数乘法了加法: ((0x00AA+0x00CC)<<16) | (0x00BB+0x00DD) = 0x00AA00BB + 0x00CC00DD 可见只要0x00AA+0x00CC和0x00BB+0x00DD小于(1<<16)那么加法可以直接使用无符号数加法了(移位、减法等稍微复杂一点,因为这里没有用到就不推导运算公式了)inline void Bilinear_Fast_Common(TARGB32* PColor0,TARGB32* PColor1, unsigned long u_8,unsigned long v_8,TARGB32* result){unsigned long pm3_8=(u_8*v_8)>>8;unsigned long pm2_8=u_8-pm3_8;unsigned long pm1_8=v_8-pm3_8;unsigned long pm0_8=256-pm1_8-pm2_8-pm3_8;unsigned long Color=*(unsigned long*)(PColor0);unsigned long BR=(Color & 0x00FF00FF)*pm0_8;unsigned long GA=((Color & 0xFF00FF00)>>8)*pm0_8;Color=((unsigned long*)(PColor0))[1];GA+=((Color & 0xFF00FF00)>>8)*pm2_8;BR+=(Color & 0x00FF00FF)*pm2_8;Color=*(unsigned long*)(PColor1);GA+=((Color & 0xFF00FF00)>>8)*pm1_8;BR+=(Color & 0x00FF00FF)*pm1_8;Color=((unsigned long*)(PColor1))[1];GA+=((Color & 0xFF00FF00)>>8)*pm3_8;BR+=(Color & 0x00FF00FF)*pm3_8;*(unsigned long*)(result)=(GA & 0xFF00FF00)|((BR & 0xFF00FF00)>>8); }inline void Bilinear_Border_Common(const TPicRegion& pic,const long x_16,const long y_16,TARGB32* result){long x=(x_16>>16);long y=(y_16>>16);unsigned long u_16=((unsigned short)(x_16));unsigned long v_16=((unsigned short)(y_16));TARGB32 pixel[4];pixel[0]=Pixels_Bound(pic,x,y);pixel[1]=Pixels_Bound(pic,x+1,y);pixel[2]=Pixels_Bound(pic,x,y+1);pixel[3]=Pixels_Bound(pic,x+1,y+1);Bilinear_Fast_Common(&pixel[0],&pixel[2],u_16>>8,v_16>>8,result);}void PicZoom_Bilinear_Common(const TPicRegion& Dst,const TPicRegion& Src) {if ( (0==Dst.width)||(0==Dst.height)||(0==Src.width)||(0==Src.height)) return;long xrIntFloat_16=((Src.width)<<16)/Dst.width+1;long yrIntFloat_16=((Src.height)<<16)/Dst.height+1;const long csDErrorX=-(1<<15)+(xrIntFloat_16>>1);const long csDErrorY=-(1<<15)+(yrIntFloat_16>>1);unsigned long dst_width=Dst.width;//计算出需要特殊处理的边界long border_y0=-csDErrorY/yrIntFloat_16+1;//y0+y*yr>=0; y0=csDErrorY => y>=-csDErrorY/yrif (border_y0>=Dst.height) border_y0=Dst.height;long border_x0=-csDErrorX/xrIntFloat_16+1;if (border_x0>=Dst.width ) border_x0=Dst.width;long border_y1=(((Src.height-2)<<16)-csDErrorY)/yrIntFloat_16+1;//y0+y*yr<=(height-2) => y<=(height-2-csDErrorY)/yrif (border_y1<border_y0) border_y1=border_y0;long border_x1=(((Src.width-2)<<16)-csDErrorX)/xrIntFloat_16+1;if (border_x1<border_x0) border_x1=border_x0;TARGB32* pDstLine=Dst.pdata;long Src_byte_width=Src.byte_width;long srcy_16=csDErrorY;long y;for (y=0;y<border_y0;++y){long srcx_16=csDErrorX;for (unsigned long x=0;x<dst_width;++x){Bilinear_Border_Common(Src,srcx_16,srcy_16,&pDstLine[x]); //bordersrcx_16+=xrIntFloat_16;}srcy_16+=yrIntFloat_16;((TUInt8*&)pDstLine)+=Dst.byte_width;}for (y=border_y0;y<border_y1;++y){long srcx_16=csDErrorX;long x;for (x=0;x<border_x0;++x){Bilinear_Border_Common(Src,srcx_16,srcy_16,&pDstLine[x]);//bordersrcx_16+=xrIntFloat_16;}{unsigned long v_8=(srcy_16 & 0xFFFF)>>8;TARGB32* PSrcLineColor= (TARGB32*)((TUInt8*)(Src.pdata)+Src_byte_width*(srcy_16>>16)) ;for (unsigned long x=border_x0;x<border_x1;++x){TARGB32* PColor0=&PSrcLineColor[srcx_16>>16];TARGB32* PColor1=(TARGB32*)((TUInt8*)(PColor0)+Src_byte_width);Bilinear_Fast_Common(PColor0,PColor1,(srcx_16 & 0xFFFF)>>8,v_8,&pDstLine[x]);srcx_16+=xrIntFloat_16;}}for (x=border_x1;x<dst_width;++x){Bilinear_Border_Common(Src,srcx_16,srcy_16,&pDstLine[x]);//bordersrcx_16+=xrIntFloat_16;}srcy_16+=yrIntFloat_16;((TUInt8*&)pDstLine)+=Dst.byte_width;}for (y=border_y1;y<Dst.height;++y){long srcx_16=csDErrorX;for (unsigned long x=0;x<dst_width;++x){Bilinear_Border_Common(Src,srcx_16,srcy_16,&pDstLine[x]); //bordersrcx_16+=xrIntFloat_16;}srcy_16+=yrIntFloat_16;((TUInt8*&)pDstLine)+=Dst.byte_width;}}//////////////////////////////////////////////////////////////////////////////////速度测试://============================================================================== // PicZoom_BilInear_Common 65.3 fps//////////////////////////////////////////////////////////////////////////////// H: 使用MMX指令改写:PicZoom_Bilinear_MMXinline void Bilinear_Fast_MMX(TARGB32* PColor0,TARGB32* PColor1, unsigned long u_8,unsigned long v_8,TARGB32* result){asm{MOVD MM6,v_8MOVD MM5,u_8mov edx,PColor0mov eax,PColor1PXOR mm7,mm7MOVD MM2,dword ptr [eax]MOVD MM0,dword ptr [eax+4]PUNPCKLWD MM5,MM5PUNPCKLWD MM6,MM6MOVD MM3,dword ptr [edx]MOVD MM1,dword ptr [edx+4]PUNPCKLDQ MM5,MM5PUNPCKLBW MM0,MM7PUNPCKLBW MM1,MM7PUNPCKLBW MM2,MM7PUNPCKLBW MM3,MM7PSUBw MM0,MM2PSUBw MM1,MM3PSLLw MM2,8PSLLw MM3,8PMULlw MM0,MM5PMULlw MM1,MM5PUNPCKLDQ MM6,MM6PADDw MM0,MM2PADDw MM1,MM3PSRLw MM0,8PSRLw MM1,8PSUBw MM0,MM1PSLLw MM1,8PMULlw MM0,MM6mov eax,resultPADDw MM0,MM1PSRLw MM0,8PACKUSwb MM0,MM7movd [eax],MM0//emms}}void Bilinear_Border_MMX(const TPicRegion& pic,const long x_16,const long y_16,TARGB32* result){long x=(x_16>>16);long y=(y_16>>16);unsigned long u_16=((unsigned short)(x_16));unsigned long v_16=((unsigned short)(y_16));TARGB32 pixel[4];pixel[0]=Pixels_Bound(pic,x,y);pixel[1]=Pixels_Bound(pic,x+1,y);pixel[2]=Pixels_Bound(pic,x,y+1);pixel[3]=Pixels_Bound(pic,x+1,y+1);Bilinear_Fast_MMX(&pixel[0],&pixel[2],u_16>>8,v_16>>8,result);}void PicZoom_Bilinear_MMX(const TPicRegion& Dst,const TPicRegion& Src) {if ( (0==Dst.width)||(0==Dst.height)||(0==Src.width)||(0==Src.height)) return;long xrIntFloat_16=((Src.width)<<16)/Dst.width+1;long yrIntFloat_16=((Src.height)<<16)/Dst.height+1;const long csDErrorX=-(1<<15)+(xrIntFloat_16>>1);const long csDErrorY=-(1<<15)+(yrIntFloat_16>>1);unsigned long dst_width=Dst.width;//计算出需要特殊处理的边界long border_y0=-csDErrorY/yrIntFloat_16+1;//y0+y*yr>=0; y0=csDErrorY => y>=-csDErrorY/yrif (border_y0>=Dst.height) border_y0=Dst.height;long border_x0=-csDErrorX/xrIntFloat_16+1;if (border_x0>=Dst.width ) border_x0=Dst.width;long border_y1=(((Src.height-2)<<16)-csDErrorY)/yrIntFloat_16+1;//y0+y*yr<=(height-2) => y<=(height-2-csDErrorY)/yrif (border_y1<border_y0) border_y1=border_y0;long border_x1=(((Src.width-2)<<16)-csDErrorX)/xrIntFloat_16+1;if (border_x1<border_x0) border_x1=border_x0;TARGB32* pDstLine=Dst.pdata;long Src_byte_width=Src.byte_width;long srcy_16=csDErrorY;long y;for (y=0;y<border_y0;++y){long srcx_16=csDErrorX;for (unsigned long x=0;x<dst_width;++x){Bilinear_Border_MMX(Src,srcx_16,srcy_16,&pDstLine[x]); //border srcx_16+=xrIntFloat_16;}srcy_16+=yrIntFloat_16;((TUInt8*&)pDstLine)+=Dst.byte_width;}for (y=border_y0;y<border_y1;++y){long srcx_16=csDErrorX;long x;for (x=0;x<border_x0;++x){Bilinear_Border_MMX(Src,srcx_16,srcy_16,&pDstLine[x]);//bordersrcx_16+=xrIntFloat_16;}{unsigned long v_8=(srcy_16 & 0xFFFF)>>8;TARGB32* PSrcLineColor= (TARGB32*)((TUInt8*)(Src.pdata)+Src_byte_width*(srcy_16>>16)) ;for (unsigned long x=border_x0;x<border_x1;++x){TARGB32* PColor0=&PSrcLineColor[srcx_16>>16];TARGB32* PColor1=(TARGB32*)((TUInt8*)(PColor0)+Src_byte_width);Bilinear_Fast_MMX(PColor0,PColor1,(srcx_16 & 0xFFFF)>>8,v_8,&pDstLine[x]);srcx_16+=xrIntFloat_16;}}for (x=border_x1;x<dst_width;++x){Bilinear_Border_MMX(Src,srcx_16,srcy_16,&pDstLine[x]);//bordersrcx_16+=xrIntFloat_16;}srcy_16+=yrIntFloat_16;((TUInt8*&)pDstLine)+=Dst.byte_width;}for (y=border_y1;y<Dst.height;++y){long srcx_16=csDErrorX;for (unsigned long x=0;x<dst_width;++x){Bilinear_Border_MMX(Src,srcx_16,srcy_16,&pDstLine[x]); //bordersrcx_16+=xrIntFloat_16;}srcy_16+=yrIntFloat_16;((TUInt8*&)pDstLine)+=Dst.byte_width;}asm emms}//////////////////////////////////////////////////////////////////////////////// //速度测试://============================================================================== // PicZoom_BilInear_MMX 132.9 fps//////////////////////////////////////////////////////////////////////////////// H': 对BilInear_MMX简单改进:PicZoom_Bilinear_MMX_Exvoid PicZoom_Bilinear_MMX_Ex(const TPicRegion& Dst,const TPicRegion& Src){if ( (0==Dst.width)||(0==Dst.height)||(0==Src.width)||(0==Src.height)) return;long xrIntFloat_16=((Src.width)<<16)/Dst.width+1;long yrIntFloat_16=((Src.height)<<16)/Dst.height+1;const long csDErrorX=-(1<<15)+(xrIntFloat_16>>1);const long csDErrorY=-(1<<15)+(yrIntFloat_16>>1);unsigned long dst_width=Dst.width;//计算出需要特殊处理的边界long border_y0=-csDErrorY/yrIntFloat_16+1;//y0+y*yr>=0; y0=csDErrorY => y>=-csDErrorY/yrif (border_y0>=Dst.height) border_y0=Dst.height;long border_x0=-csDErrorX/xrIntFloat_16+1;if (border_x0>=Dst.width ) border_x0=Dst.width;long border_y1=(((Src.height-2)<<16)-csDErrorY)/yrIntFloat_16+1;//y0+y*yr<=(height-2) => y<=(height-2-csDErrorY)/yrif (border_y1<border_y0) border_y1=border_y0;long border_x1=(((Src.width-2)<<16)-csDErrorX)/xrIntFloat_16+1;if (border_x1<border_x0) border_x1=border_x0;TARGB32* pDstLine=Dst.pdata;long Src_byte_width=Src.byte_width;long srcy_16=csDErrorY;long y;for (y=0;y<border_y0;++y){long srcx_16=csDErrorX;for (unsigned long x=0;x<dst_width;++x){Bilinear_Border_MMX(Src,srcx_16,srcy_16,&pDstLine[x]); //bordersrcx_16+=xrIntFloat_16;}srcy_16+=yrIntFloat_16;((TUInt8*&)pDstLine)+=Dst.byte_width;}for (y=border_y0;y<border_y1;++y){long srcx_16=csDErrorX;long x;for (x=0;x<border_x0;++x){Bilinear_Border_MMX(Src,srcx_16,srcy_16,&pDstLine[x]);//bordersrcx_16+=xrIntFloat_16;}{long dst_width_fast=border_x1-border_x0;if (dst_width_fast>0){unsigned long v_8=(srcy_16 & 0xFFFF)>>8;TARGB32* PSrcLineColor= (TARGB32*)((TUInt8*)(Src.pdata)+Src_byte_width*(srcy_16>>16)) ;TARGB32* PSrcLineColorNext= (TARGB32*)((TUInt8*)(PSrcLineColor)+ Src_byte_width) ;TARGB32* pDstLine_Fast=&pDstLine[border_x0];asm{movd mm6,v_8pxor mm7,mm7 //mm7=0PUNPCKLWD MM6,MM6PUNPCKLDQ MM6,MM6//mm6=v_8mov esi,PSrcLineColormov ecx,PSrcLineColorNextmov edx,srcx_16mov ebx,dst_width_fastmov edi,pDstLine_Fastlea edi,[edi+ebx*4]push ebpmov ebp,xrIntFloat_16neg ebxloop_start:mov eax,edxshl eax,16shr eax,24//== movzx eax,dh //eax=u_8MOVD MM5,eaxmov eax,edxshr eax,16 //srcx_16>>16MOVD MM2,dword ptr [ecx+eax*4]MOVD MM0,dword ptr [ecx+eax*4+4]PUNPCKLWD MM5,MM5MOVD MM3,dword ptr [esi+eax*4]MOVD MM1,dword ptr [esi+eax*4+4]PUNPCKLDQ MM5,MM5 //mm5=u_8PUNPCKLBW MM0,MM7PUNPCKLBW MM1,MM7PUNPCKLBW MM2,MM7PUNPCKLBW MM3,MM7PSUBw MM0,MM2PSUBw MM1,MM3PSLLw MM2,8PSLLw MM3,8PMULlw MM0,MM5PMULlw MM1,MM5PADDw MM0,MM2PADDw MM1,MM3PSRLw MM0,8PSRLw MM1,8PSUBw MM0,MM1PSLLw MM1,8PMULlw MM0,MM6PADDw MM0,MM1PSRLw MM0,8PACKUSwb MM0,MM7MOVd dword ptr [edi+ebx*4],MM0 //write DstColor add edx,ebp //srcx_16+=xrIntFloat_16inc ebxjnz loop_startpop ebpmov srcx_16,edx}}}for (x=border_x1;x<dst_width;++x){Bilinear_Border_MMX(Src,srcx_16,srcy_16,&pDstLine[x]);//bordersrcx_16+=xrIntFloat_16;}srcy_16+=yrIntFloat_16;((TUInt8*&)pDstLine)+=Dst.byte_width;}for (y=border_y1;y<Dst.height;++y){long srcx_16=csDErrorX;for (unsigned long x=0;x<dst_width;++x){Bilinear_Border_MMX(Src,srcx_16,srcy_16,&pDstLine[x]); //bordersrcx_16+=xrIntFloat_16;}srcy_16+=yrIntFloat_16;((TUInt8*&)pDstLine)+=Dst.byte_width;}asm emms}//////////////////////////////////////////////////////////////////////////////// //速度测试://============================================================================== // PicZoom_Bilinear_MMX_Ex 157.0 fps//////////////////////////////////////////////////////////////////////////////// I: 把测试成绩放在一起://////////////////////////////////////////////////////////////////////////////// //CPU: AMD64x2 4200+(2.37G) zoom 800*600 to 1024*768//============================================================================== // StretchBlt 232.7 fps// PicZoom3_SSE 711.7 fps//// PicZoom_BilInear0 8.3 fps// PicZoom_BilInear1 17.7 fps// PicZoom_BilInear2 43.4 fps// PicZoom_BilInear_Common 65.3 fps// PicZoom_BilInear_MMX 132.9 fps// PicZoom_BilInear_MMX_Ex 157.0 fps////////////////////////////////////////////////////////////////////////////////补充Intel Core2 4400上的测试成绩://////////////////////////////////////////////////////////////////////////////// //CPU: Intel Core2 4400(2.00G) zoom 800*600 to 1024*768//============================================================================== // PicZoom3_SSE 1099.7 fps//// PicZoom_BilInear1 24.2 fps// PicZoom_BilInear2 54.3 fps// PicZoom_BilInear_Common 59.8 fps// PicZoom_BilInear_MMX 118.4 fps// PicZoom_BilInear_MMX_Ex 142.9 fps//////////////////////////////////////////////////////////////////////////////// 三次卷积插值J: 三次卷积插值原理二次线性插值缩放出的图片很多时候让人感觉变得模糊(术语叫低通滤波),特别是在放大的时候;使用三次卷积插值来改善插值结果;三次卷积插值考虑映射点周围16个点(4x4)的颜色来计算最终的混合颜色,如图;P(0,0)所在像素为映射的点,加上它周围的15个点,按一定系数混合得到最终输出结果;混合公式参见PicZoom_ThreeOrder0的实现;插值曲线公式sin(x*PI)/(x*PI),如图:三次卷积插值曲线sin(x*PI)/(x*PI) (其中PI=3.1415926...)K: 三次卷积插值缩放算法的一个参考实现:PicZoom_ThreeOrder0 该函数并没有做过多的优化,只是一个简单的浮点实现版本;inline double SinXDivX(double x){//该函数计算插值曲线sin(x*PI)/(x*PI)的值 //PI=3.1415926535897932385;//下面是它的近似拟合表达式const float a = -1;//a还可以取 a=-2,-1,-0.75,-0.5等等,起到调节锐化或模糊程度的作用if (x<0) x=-x; //x=abs(x);double x2=x*x;double x3=x2*x;if (x<=1)return (a+2)*x3 - (a+3)*x2 + 1;else if (x<=2)return a*x3 - (5*a)*x2 + (8*a)*x - (4*a);elsereturn 0;}inline TUInt8 border_color(long Color){if (Color<=0)return 0;else if (Color>=255)return 255;elsereturn Color;}void ThreeOrder0(const TPicRegion& pic,const float fx,const float fy,TARGB32* result){long x0=(long)fx; if (x0>fx) --x0; //x0=floor(fx);long y0=(long)fy; if (y0>fy) --y0; //y0=floor(fy);float fu=fx-x0;float fv=fy-y0;TARGB32 pixel[16];long i,j;for (i=0;i<4;++i){for (j=0;j<4;++j){long x=x0-1+j;long y=y0-1+i;pixel[i*4+j]=Pixels_Bound(pic,x,y);}}。
三次样条插值算法详解

三次样条插值算法要求数据点数量较多,且在某些情况下可能存在数值不稳定性,如数据 点过多或数据点分布不均等情况。此外,该算法对于离散数据点的拟合效果可能不如其他 插值方法。
对未来研究的展望
01
02
03
改进算法稳定性
针对数值不稳定性问题, 未来研究可以探索改进算 法的数值稳定性,提高算 法的鲁棒性。
3
数据转换
对数据进行必要的转换,如标准化、归一化等, 以适应算法需求。
构建插值函数
确定插值节点
根据数据点确定插值节点,确保插值函数在节点处连续且光滑。
构造插值多项式
根据节点和数据点,构造三次多项式作为插值函数。
确定边界条件
根据实际情况确定插值函数的边界条件,如周期性、对称性等。
求解插值函数
求解线性方程组
06
结论
三次样条插值算法总结
适用性
三次样条插值算法适用于各种连续、光滑、可微的分段函数插值问题,尤其在处理具有复 杂变化趋势的数据时表现出色。
优点
该算法能够保证插值函数在分段连接处连续且具有二阶导数,从而在插值过程中保持数据 的平滑性和连续性。此外,三次样条插值算法具有简单、易实现的特点,且计算效率较高 。
根据数据点的数量和分布,合理分段,确保 拟合的精度和连续性。
求解线性方程组
使用高效的方法求解线性方程组,如高斯消 元法或迭代法。
结果输出
输出拟合得到的插值函数,以及相关的误差 分析和图表。
03
三次样条插值算法步骤
数据准备
1 2
数据收集
收集需要插值的原始数据点,确保数据准确可靠。
数据清洗
对数据进行预处理,如去除异常值、缺失值处理 等。
图像插值算法总结
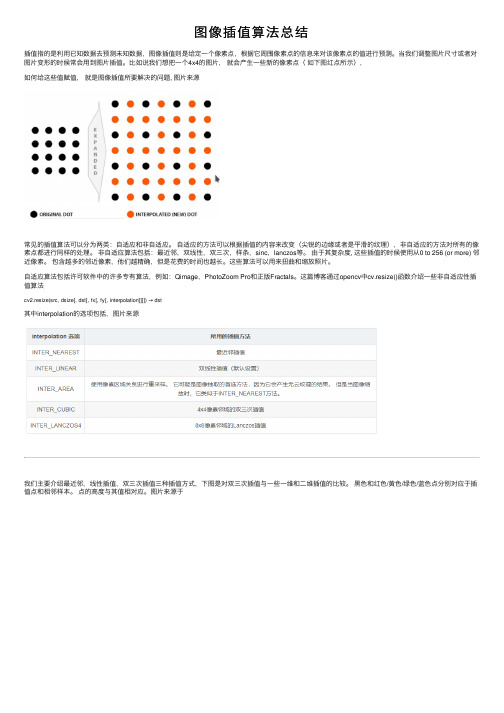
图像插值算法总结插值指的是利⽤已知数据去预测未知数据,图像插值则是给定⼀个像素点,根据它周围像素点的信息来对该像素点的值进⾏预测。
当我们调整图⽚尺⼨或者对图⽚变形的时候常会⽤到图⽚插值。
⽐如说我们想把⼀个4x4的图⽚,就会产⽣⼀些新的像素点(如下图红点所⽰),如何给这些值赋值,就是图像插值所要解决的问题, 图⽚来源常见的插值算法可以分为两类:⾃适应和⾮⾃适应。
⾃适应的⽅法可以根据插值的内容来改变(尖锐的边缘或者是平滑的纹理),⾮⾃适应的⽅法对所有的像素点都进⾏同样的处理。
⾮⾃适应算法包括:最近邻,双线性,双三次,样条,sinc,lanczos等。
由于其复杂度, 这些插值的时候使⽤从0 to 256 (or more) 邻近像素。
包含越多的邻近像素,他们越精确,但是花费的时间也越长。
这些算法可以⽤来扭曲和缩放照⽚。
⾃适应算法包括许可软件中的许多专有算法,例如:Qimage,PhotoZoom Pro和正版Fractals。
这篇博客通过opencv中cv.resize()函数介绍⼀些⾮⾃适应性插值算法cv2.resize(src, dsize[, dst[, fx[, fy[, interpolation]]]]) → dst其中interpolation的选项包括,图⽚来源我们主要介绍最近邻,线性插值,双三次插值三种插值⽅式,下图是对双三次插值与⼀些⼀维和⼆维插值的⽐较。
⿊⾊和红⾊/黄⾊/绿⾊/蓝⾊点分别对应于插值点和相邻样本。
点的⾼度与其值相对应。
图⽚来源于最近邻顾名思义最近邻插值就是选取离⽬标点最近的点的值(⿊点,原来就存在的点)作为新的插⼊点的值,⽤opencv进⾏图像处理时,根据srcX = dstX* (srcWidth/dstWidth)srcY = dstY * (srcHeight/dstHeight)得到来计算⽬标像素在源图像中的位置,dstY代表输出图Y的坐标,srcY代表原图Y的坐标,srcX、srcY同理。
双三次插值(bicubic interpolation)原理及MATLAB源码实现
%双三次插值具体实现clc,clear;fff=imread('E:\Documents\BUPT\DIP\图片\lena.bmp');ff = rgb2gray(fff);%转化为灰度图像[mm,nn]=size(ff); %将图像隔行隔列抽取元素,得到缩小的图像fm=mm/2;n=nn/2;f = zeros(m,n);for i=1:mfor j=1:nf(i,j)=ff(2*i,2*j);endendk=5; %设置放大倍数bijiao1 = imresize(f,k,'bilinear');%双线性插值结果比较bijiao = uint8(bijiao1);a=f(1,:);c=f(m,:); %将待插值图像矩阵前后各扩展两行两列,共扩展四行四列b=[f(1,1),f(1,1),f(:,1)',f(m,1),f(m,1)];d=[f(1,n),f(1,n),f(:,n)',f(m,n),f(m,n)];a1=[a;a;f;c;c];b1=[b;b;a1';d;d];ffff=b1';f1=double(ffff);g1 = zeros(k*m,k*n);for i=1:k*m %利用双三次插值公式对新图象所有像素赋值u=rem(i,k)/k; i1=floor(i/k)+2;A=[sw(1+u) sw(u) sw(1-u) sw(2-u)];for j=1:k*nv=rem(j,k)/k;j1=floor(j/k)+2;C=[sw(1+v);sw(v);sw(1-v);sw(2-v)];B=[f1(i1-1,j1-1) f1(i1-1,j1) f1(i1-1,j1+1) f1(i1-1,j1+2)f1(i1,j1-1) f1(i1,j1) f1(i1,j1+1) f1(i1,j1+2)f1(i1+1,j1-1) f1(i1+1,j1) f1(i1+1,j1+1) f1(i1+1,j1+2)f1(i1+2,j1-1) f1(i1+2,j1) f1(i1+2,j1+1) f1(i1+2,j1+2)];g1(i,j)=(A*B*C);endendg=uint8(g1);imshow(uint8(f)); title('缩小的图像'); %显示缩小的图像figure,imshow(ff);title('原图'); %显示原图像figure,imshow(g);title('双三次插值放大的图像'); %显示插值后的图像figure,imshow(bijiao);title('双线性插值放大结果'); %显示插值后的图像mse=0;ff=double(ff);g=double(g);ff2=fftshift(fft2(ff)); %计算原图像和插值图像的傅立叶幅度谱g2=fftshift(fft2(g));figure,subplot(1,2,1),imshow(log(abs(ff2)),[8,10]);title('原图像的傅立叶幅度谱'); subplot(1,2,2),imshow(log(abs(g2)),[8,10]);title('双三次插值图像的傅立叶幅度谱');基函数代码:function A=sw(w1)w=abs(w1);if w<1&&w>=0A=1-2*w^2+w^3;elseif w>=1&&w<2A=4-8*w+5*w^2-w^3;elseA=0;end算法原理双三次插值又称立方卷积插值。
双三次插值原理及MATLAB源码实现

%双三次插值具体实现;('E:\\\\图片\');= 2()转化为灰度图像[](); %将图像隔行隔列抽取元素,得到缩小的图像f22;f = ();11f()(2*i,2*j);5; %设置放大倍数1 = (,'')双线性插值结果比较= 8(1);(1,:)(m,:); %将待插值图像矩阵前后各扩展两行两列,共扩展四行四列[f(1,1)(1,1)(:,1)'(m,1)(m,1)][f(1)(1)()'()()];a1=[];b1=[1'];1'1();g1 = (k**n);1*m %利用双三次插值公式对新图象所有像素赋值(); i1()+2;[(1) (u) (1) (2)];1*n()1()+2;[(1)(v)(1)(2)];[f1(i1-11-1) f1(i1-11) f1(i1-11+1) f1(i1-11+2)f1(i11-1) f1(i11) f1(i11+1) f1(i11+2)f1(i1+11-1) f1(i1+11) f1(i1+11+1) f1(i1+11+2)f1(i1+21-1) f1(i1+21) f1(i1+21+1) f1(i1+21+2)];g1()=(A*B*C);8(g1);(8(f)); ('缩小的图像'); %显示缩小的图像()('原图'); %显示原图像(g)('双三次插值放大的图像'); %显示插值后的图像()('双线性插值放大结果'); %显示插值后的图像0()(g);2(2()); %计算原图像和插值图像的傅立叶幅度谱g2(2(g));(1,2,1)(((2)),[8,10])('原图像的傅立叶幅度谱');(1,2,2)(((g2)),[8,10])('双三次插值图像的傅立叶幅度谱');基函数代码:(w1)(w1);w<1>=01-2*w^2^3;w>=1<24-8*5*w^2^3;0;算法原理双三次插值又称立方卷积插值。
常用三种图像插值算法
常见图像插值算法只有3种么?电脑摄像头最高只有130万像素的,800万是通过软件修改的。
何为数码插值(软件插值)插值(Interpolation),有时也称为“重置样本”,是在不生成像素的情况下增加图像像素大小的一种方法,在周围像素色彩的基础上用数学公式计算丢失像素的色彩。
简单地说,插值是根据中心像素点的颜色参数模拟出周边像素值的方法,是数码相机特有的放大数码照片的软件手段。
一、认识插值的算法“插值”最初是电脑术语,后来引用到数码图像上来。
图像放大时,像素也相应地增加,但这些增加的像素从何而来?这时插值就派上用场了。
插值就是在不生成像素的情况下增加图像像素大小的一种方法,在周围像素色彩的基础上用数学公式计算丢失像素的色彩(也有些相机使用插值,人为地增加图像的分辨率)。
所以在放大图像时,图像看上去会比较平滑、干净。
但必须注意的是插值并不能增加图像信息。
以图1为原图(见图1),以下是经过不同插值算法处理的图片。
1.最近像素插值算法最近像素插值算法(Nearest Neighbour Interpolation)是最简单的一种插值算法,当图片放大时,缺少的像素通过直接使用与之最接近的原有像素的颜色生成,也就是说照搬旁边的像素,这样做的结果是产生了明显可见的锯齿(见图2)。
2.双线性插值算法双线性插值算法(Bilinear Interpolation)输出的图像的每个像素都是原图中四个像素(2×2)运算的结果,这种算法极大程度上消除了锯齿现象(见图3)。
3.双三次插值算法双三次插值算法(Bicubic Interpolation)是上一种算法的改进算法,它输出图像的每个像素都是原图16个像素(4×4)运算的结果(见图4)。
这种算法是一种很常见的算法,普遍用在图像编辑软件、打印机驱动和数码相机上。
4.分形算法分形算法(Fractal Interpolation)是Altamira Group提出的一种算法,这种算法得到的图像跟其他算法相比更清晰、更锐利(见图5)。
双三次插值法去除马赛克的原理及matlab代码实现

双三次插值法去除马赛克的原理及matlab代码实现双三次插值法(Bicubic Interpolation)是一种在图像处理中常用的图像重采样方法。
它比双线性插值法(Bilinear Interpolation)更复杂,但可以提供更好的图像质量。
双三次插值法的原理是:在原始图像中,以目标像素为中心,取其周围16个像素的灰度值,根据双三次多项式函数进行拟合,计算出目标像素的灰度值,以实现图像的放大或缩小。
由于其采用更高阶的多项式拟合,因此可以得到比双线性插值法更平滑的图像。
在去除马赛克方面,双三次插值法可以用于对马赛克区域进行插值,以恢复原始图像的细节。
具体实现步骤如下:1. 确定马赛克区域:首先需要确定图像中哪些区域是马赛克区域,这可以通过阈值分割、边缘检测等方法实现。
2. 对马赛克区域进行双三次插值:对于每个马赛克区域,以目标像素为中心,取其周围16个像素的灰度值,根据双三次多项式函数进行拟合,计算出目标像素的灰度值。
3. 合成图像:将插值后的马赛克区域与原始图像中的非马赛克区域进行合成,得到最终的图像。
下面是一个简单的Matlab代码实现:```matlabfunction output = bicubic_interpolation(input, scale) % 输入:原始图像 input,缩放比例 scale% 输出:经过双三次插值后的输出图像 output% 获取输入图像的大小[input_rows, input_cols, channels] = size(input);% 计算输出图像的大小output_rows = input_rows scale;output_cols = input_cols scale;% 对每个像素进行双三次插值output = zeros(output_rows, output_cols, channels); for i = 1:output_rowsfor j = 1:output_cols% 计算当前像素在输入图像中的位置x = (i - 1) / scale + 1;y = (j - 1) / scale + 1;% 对每个通道进行插值for c = 1:channels% 获取周围16个像素的灰度值window = input(round(x-1):round(x+1), round(y-1):round(y+1), c);% 对灰度值进行双三次插值output(i, j, c) = bicubic_interpolation_single(window);endendendendfunction output = bicubic_interpolation_single(input)% 输入:16个像素的灰度值 input(按行优先顺序排列)% 输出:目标像素的灰度值 output% 计算系数矩阵 A 和常数矩阵 BA = [1 -2 1 0 -2 4 -2 1; 4 -8 4 0 -8 24 -8 4; 1 -2 1 0 -2 4 -2 1];B = [-192 48 -32 -64 -32 8; -96 24 -16 -32 -16 4; -96 24 -16 -32 -16 4];% 解线性方程组 Ax=B,得到目标像素的灰度值 outputoutput = A \ B;end```该代码实现了对单通道灰度图像的双三次插值,如果需要处理彩色图像,需要对每个通道分别进行插值。
双三次卷积重采样法matlab

双三次卷积重采样法是指利用双三次插值方法对图像进行重采样的一种技术。
通过该方法,可以在图像缩放的过程中减少失真并保持图像质量。
1.引言图像处理是数字信号处理中的重要领域,它涵盖了图像的获取、存储、传输、处理和分析等方面。
在图像处理中,图像的重采样是指改变图像的采样率,从而改变图像的像素数量和大小,通常用于图像的缩放、旋转、翻转等操作。
双三次卷积重采样法是一种常用的图像重采样技术,它可以有效地保持图像细节,减少失真,提高图像质量。
2.双三次插值方法双三次插值方法是一种常用的插值方法,它通过对图像像素周围的像素进行加权求和,来估计目标像素的灰度值。
在双三次插值方法中,将目标像素周围的16个邻近像素进行插值计算,得到目标像素的灰度值。
使用双三次插值方法可以有效地减少图像重采样过程中的失真和伪影。
3.双三次卷积重采样法双三次卷积重采样法是基于双三次插值方法的一种图像重采样技术。
在该方法中,首先对目标图像进行重采样操作,然后利用双三次插值方法来估计目标像素的灰度值。
通过这种方式,可以有效地减少图像重采样过程中的失真和伪影,保持图像的细节和质量。
4.Matlab中的双三次卷积重采样Matlab是一种常用的科学计算软件,它提供了丰富的图像处理工具和函数。
在Matlab中,可以利用内置函数对图像进行双三次卷积重采样操作。
通过调用相关的函数,可以很容易地实现对图像的缩放和重采样,并且可以选择双三次插值方法来保持图像的细节和质量。
5.优缺点分析双三次卷积重采样法作为一种常用的图像重采样技术,具有以下优点:- 能够有效地保持图像的细节和质量,减少失真和伪影。
- 实现简单,易于理解和使用,在Matlab等软件中有现成的函数和工具可以调用。
- 适用于各种图像缩放和重采样操作,具有较好的通用性。
然而,双三次卷积重采样法也存在一些缺点:- 计算量较大,需要对目标像素周围的16个邻近像素进行插值计算,运算复杂度较高。
- 在某些情况下,可能会出现块状伪影等问题,影响图像的视觉效果。
基于双三次插值的巡检机器人初始位姿优化

2018年5月第47卷第5期机械设计与制造工程Machine Design and Manufacturing EngineeringMay.2018Vol.47 No.5DOI:10.3969/j.issn.2095 - 509X.2018.05.012基于双三次插值的巡检机器人初始位姿优化林欢,王锋(亿嘉和科技股份有限公司,江苏南京210012)摘要:针对变电站稀疏环境下智能巡检机器人初始定位误差大的问题,提出一种基于双三次插值 法的巡检机器人初始位姿优化方法。
首先对栅格地图进行定位窗口的扫描,计算出可能的位姿候选。
然后根据变电站的环境特点,对位姿候选点进行置信度计算,从而得到分值最高的位姿作 为初始定位估值。
最后根据双三次插值法来构建初始位姿的优化目标函数,对初始定位的估值进行更精确的计算从而确定最优的初始位姿。
实验结果显示,该方法能实现精确的初始定位且具有较强的鲁棒性。
关键词:双三次插值法;巡检机器人;初始位姿;变电站中图分类号:TP24 文献标识码:A文章编号:2095 -509X(2018)05 -0056 -05目前智能电网的建设过程中需要对变电设备 状态进行检测,利用变电站智能巡检机器人能够实 现变电站全天候、全方位、全自主的智能巡检和监控,有效降低了工人劳动强度和变电站自身运行维 护的成本,提高了巡检机器人正常作业和管理的智 能化、自动化水平,为智能变电站提供了创新性的技术检测手段和全方位的安全保障[1]。
与传统的轨道式巡检机器人不同,利用二维激 光定位导航的智能巡检机器人[1]不仅可以节省轨道铺设的成本和工作量,而且巡检工作更加灵活,可以根据需要进行巡检路线的规划。
巡检机器人在激光定位的工作过程中,机器人的初始定位会影 响到整个巡检过程的效率和准确度。
初始定位的不准确不仅会增加机器人迷路的可能性,而且对后 续设备检测的位置和角度也会产生不良的影响。
因此,初始位姿优化方法的设计,是开发变电站自 主巡检机器人中的关键技术。
遥感图像的超分辨率重构技术研究

遥感图像的超分辨率重构技术研究随着科技的进步,遥感技术在农业、城市规划、环境监测等方面得到了广泛应用。
但由于遥感图像分辨率较低,难以满足精细化需求,因此需要通过超分辨率重构技术来提高图像分辨率。
在这篇文章中,我们将探讨遥感图像超分辨率重构技术的研究现状及其发展方向。
一、遥感图像的超分辨率重构技术概述超分辨率重构技术是一种通过算法将低分辨率图像转换为高分辨率图像的方法。
在遥感图像中,由于图像本身分辨率较低,导致细节信息丢失,对诊断、分析等具有一定的困难。
而通过超分辨率重构技术,可以将细节信息重新恢复出来,提升了遥感技术的应用范围。
目前,常见的超分辨率重构技术有基于插值和基于重建的两种方法。
基于插值的超分辨率重构技术是通过对低分辨率图像进行插值,得到高分辨率图像。
而基于重建的超分辨率重构技术则是通过寻找一组合适的高分辨率图像来拟合低分辨率图像。
二、常见的超分辨率重构算法1. 双三次插值法双三次插值法是一种基于插值的算法,常用于图像放大和图像降噪中。
该算法是通过对低分辨率图像进行插值,得到高分辨率图像。
但该算法存在严重的模糊和锯齿现象,对图像的细节处理较差。
2. 全变差(Total Variation)重构算法全变差重构算法是一种基于重建的算法,可以平衡图像的平滑度和细节保持性。
该算法利用最小二乘迭代算法,通过优化能量函数,求解高分辨率图像。
与其他算法相比,全变差算法处理细节更加细致,但计算量较大。
3. 生成对抗网络(GAN)算法生成对抗网络是近年来非常热门的算法之一。
该算法基于深度学习,可以生成逼真的高分辨率图像。
GAN算法利用生成器和判别器相互对抗的方式,可以生成高质量的图像。
但GAN算法需要大量的数据和计算资源,在实际应用中存在一定的局限性。
三、遥感图像超分辨率重构技术的应用遥感图像超分辨率重构技术在农业、城市规划、环境监测等领域具有广泛的应用。
通过超分辨率重构技术,可以更加准确地确定农田、水体、林地等不同地物类型。
1_3福州大学本科生毕业设计(论文)_基于六角像素的图像双三次插值算法_正文
基于六角像素的图像双三次插值算法摘要与传统的方形网格相比,基于六角网格的数字图像处理方法有它独特的优点,因此,基于六角像素的图像处理技术的研究越来越受到人们的关注。
然而,由于没有成熟的硬件来支持基于六角网格下图像的获取和显示,人们的研究工作往往在模拟六角网格进行。
在四角像素中,双三次插值算法是一种插值效果较好的方法。
本文的主要任务就是研究在六角像素下的双三次插值算法的使用和使用效果。
试图证明:在六角像素下双三次插值算法也同样具有更好的插值效果。
本文采用一种Pseudo六角像素模拟方法中关于虚拟六角像素的SA算法,在虚拟六角像素定址的基础上实现虚拟六角网格中的插值实验。
具体步骤:1.首先将一个正方形像素细分为7×7的49个小像素,用双线性插值算法求每个小像素的灰度,并表示图像。
2.在虚拟的六角结构下运用双线性插值算法对灰度图像进行灰度重建,再采用双三次插值算法,对相同的灰度图像进行灰度重建。
本文采用三次卷积公式进行双三次插值。
3.返回到四角结构下显示重建图像,比较两个重建灰度图的重建效果。
4.通过计算原始图像信号-噪音功率比和最终图像的信号-噪音功率比,对实验结果进行分析比较,我们可以得到这样的结论:在六角形象素下的图像双三次插值算法同样具有更好的插值效果。
关键词:六角网格,灰度值,双三次插值精品文档你我共享Image Bicubic Interpolation AlgorithmBase on Hexagonal GridAbstractCompared to the traditional square grid,The way of image processing based on the hexangular grid has its special advantage.Therefore,people pay more and more attention to the study of image processing techlnique.However,Because there is no mature hardware supporting for the capture and display of hexagonal-based image,the study work of researchers is done based on hexangular grid imitation.Bicubic interpolation is a way in square grid which has better effect of image interpolation.The main job of this paper. is studying how to use Bicubic interpolation on the hexangular pixel and the effect of using.Try to prove that Bicubic interpolation also has better effect of image interpolation on hexangular pixel.This paper uses SA algorithm about virtual hexangular pixel which is a part of Pseudo hexangular pixel imitation,,it uses the SA algorithm to implement the virtual hexangular grid based on ascertaining the address in imitating the hexangular pixel. Concrete step:1. First,each one pixel is divided delicately to 49 small pixel. Then, we adoptthe Blinear interpolation to calculate the grey and figure the image.2. We adopt the improved Blinear interpolation based on hexangular gridimitation to reconstruct the grey image. We do it again using the improvedBicubic interpolation instead and reconstruct the same grey image. Thispaper adopts Bicubic interpolation in the use of cubic convolution formula.3. We compare the rebuilding effect of two grey images after displaying thereconstructed image on square grid.4. After computing signal to noise between original and final image andanalysing,comparing the result, we can make the conclusion that the imageBicubic interpolation based on hexangular grid has better effect ininterpolationKey Words: hexagonal grid, grey value,bicubic-interpolation目录摘要 (I)Abstract ........................................................... I I 第一章绪论 (1)1.1 研究背景 (1)1.2 研究的主要内容 (1)1.3 研究的目的意义 (2)第二章虚拟六角结构分析 (3)2.1四角网格 (3)2.2六角网格 (3)2.3六角网格的特点 (4)2.3.1四角网格与六角网格的进一步比较 (4)2.3.2六角网格的优点 (4)2.4 模拟六角网格 (5)2.3.1四角像素错位模拟六角像素 (5)2.3.2另一种方法的模拟六角结构 (6)2.3.3 Pseudo六角像素 (7)2.3.4虚拟六角结构下的图像处理 (8)第三章插值实验设计 (9)3.1 灰度插值算法 (9)3.1.1 最近邻插值算法(近邻取样法) (9)3.1.2 双线性插值法 (9)3.1.3 双三次插值法 (10)3.2 实验的软硬件条件 (11)3.2.1 实验的硬件要求 (11)3.2.2 实验的软件要求 (11)3.3 定址方法 (11)3.4基于六角网格的双线性插值实验 (13)3.5基于六角网格的双三次插值实验 (16)3.5.1传统的双三次插值算法 (16)3.5.2 改进后的基于六角网格的双三次插值算法 (16)3.5.3 实现基于六角网格的双三次插值法 (17)第四章实验结果及分析 (19)4.1 实验结果 (19)4.2 结果分析 (20)结论 (22)谢辞 (23)参考文献 (24)第一章绪论1.1 研究背景插值算法是计算机图形学和图像处理的基本算法,它广泛地应用在图像缩放和旋转、动画中间帧的生成等图形学和图像处理问题的研究之中。
bicubic插值

bicubic插值bicubic插值算法,也被称为双三次插值算法,从纯数学的数值分析的角度,属于三次插值(可以理解为导数平滑的插值算法),类比于bilinear插值,值域平滑的插值算法,其保边能力更强;从信号与系统的角度,属于sa信号重建函数,在频域的理想低通滤波器。
从信号与系统的角度理解,bicubic更像一个理想低通滤波器,而bilinear更像一个高斯低通滤波器。
这里主要从信号与系统的角度,去解释bicubic算法,也就是sa函数。
离散信号重建,会涉及到单位冲激、冲激串函数,单位冲激、冲激串函数的傅里叶变换,卷积和乘积的傅里叶变换对,采样定理,混叠以及采样后的信号重建函数。
其实一个看似简单且经典的插值算法,实则背后有着强大的理论支撑。
1、单位冲激、冲激串函数冲激函数与冲激串函数冲激函数是一个奇异函数,在物理层面上,将t解释为时间,那么冲激可视为幅度无穷大、持续时间为0、具有单位面积的尖峰信号。
犹如一道闪电一般,能量极高,但持续时间极短。
从物理的角度,主要用途就是信号取样。
从数学的角度,通常基于泛函(函数的函数)去定义冲激函数,对于一个任意连续函数簇,通过冲激函数的乘积作用后的积分,可以获取原函数取样点(这个函数域到值域的映射关系,定义了冲激泛函)。
2、冲激串的傅里叶变换盒子函数傅里叶变换首先是盒状函数的傅里叶变换,盒状函数本质上是单位脉冲信号,也是单位冲激信号的泛化形式(当A趋于无穷大,W趋于无穷小时)。
盒状函数的傅里叶变换是一个sa函数,值得注意的是,傅里叶变换后的sa函数,其一,幅值是AW(时域盒状函数幅值和时域宽度的乘积);其二,sa函数的零点距离为1/W,盒状函数的零点距离维W,两者互为倒数。
当盒状函数,W趋于无穷大时,sa函数即趋于冲激函数;故此可知,常数的傅里叶变换是冲激函数。
(常数与零点冲激函数是一对傅里叶变换对)其次是单位冲激函数的傅里叶变换,这个则很简单,由于冲激函数的取样特性,容易知道,傅里叶变换最终结果为常数。
bayer插值算法
bayer插值算法Bayer插值算法是一种常用的图像插值算法,它主要用于将低分辨率的图像放大到高分辨率。
该算法以其简单而高效的特点被广泛应用于数字图像处理领域。
Bayer插值算法的原理是基于彩色图像中的三原色通道之间的关系。
在彩色图像中,每个像素点都包含红、绿、蓝三个通道的信息。
然而,在低分辨率的图像中,只有部分通道的信息是可用的,而其他通道的信息需要通过插值来恢复。
Bayer插值算法的核心思想是通过对已知通道进行插值来估计未知通道的值。
在Bayer插值算法中,常用的插值方法有最近邻插值、双线性插值和双三次插值等。
最近邻插值是最简单的插值方法之一。
它的原理是将未知通道的像素值设置为距离最近的已知通道的像素值。
这种插值方法简单快速,但会导致图像出现锯齿状的伪影。
双线性插值是一种基于线性插值的方法。
它通过对已知通道的像素值进行加权平均来估计未知通道的像素值。
这种插值方法可以有效地减少锯齿状伪影,但在一些细节丰富的区域可能会导致模糊。
双三次插值是一种更高级的插值方法。
它通过对已知通道周围的像素进行加权平均来估计未知通道的像素值。
这种插值方法可以更好地保留图像的细节,并减少锯齿状伪影。
然而,双三次插值算法的计算量较大,可能会导致处理时间增加。
除了以上提到的插值方法外,还有其他一些改进的Bayer插值算法,如Adaptive Homogeneity-Directed Demosaicing (AHDD)算法、Frequency Domain Demosaicing算法等。
这些算法基于不同的原理和思想,可以在一定程度上改善图像的质量。
总结起来,Bayer插值算法是一种常用的图像插值算法,通过对已知通道的像素值进行插值来估计未知通道的像素值。
它的核心思想是基于彩色图像中的三原色通道之间的关系。
不同的插值方法在保留图像细节和减少伪影方面有不同的效果。
在实际应用中,我们可以根据具体需求选择合适的插值方法来提高图像的质量。
图形放大知识点总结

图形放大知识点总结一、图像放大的基本原理图像放大是指在不改变图像内容的情况下,增加图像的尺寸和分辨率。
放大前后,图像的视觉效果应该保持一致,不应该出现明显的失真和模糊。
从数学上来讲,图像放大可以理解为对图像进行空间域的插值操作,通过增加像素点的数量和密度,来实现图像的放大效果。
常见的图像放大算法包括最邻近插值、双线性插值、双三次插值等。
下面我们将分别介绍这几种插值算法的原理和特点。
1. 最邻近插值最邻近插值是一种简单和直观的插值算法,它的原理是将原图像中的每个像素点按照一定比例进行复制,从而实现图像的放大。
比如,如果将图像放大2倍,那么在横向和纵向的像素点数量都将变成原来的2倍,这时候需要将原图像中的每个像素点复制一次,填充到新的图像中。
虽然最邻近插值算法操作简单,但是它容易导致图像出现明显的锯齿和失真现象,特别是在放大倍数较大的情况下,因此在实际应用中并不常用。
2. 双线性插值双线性插值是一种通过对四个相邻像素点进行线性加权平均的插值方法,它可以有效减少图像放大过程中的锯齿和失真现象,得到更加平滑和清晰的放大效果。
假设原图像中的像素点为A、B、C、D,而要放大的目标像素点为P,在双线性插值算法中,P点的像素值可以通过如下公式计算得到:P = (1 - u)(1 - v)A + u(1 - v)B + uvC + (1 - u)vD其中,u和v分别表示P点在水平和垂直方向上的相对位置,它们的取值范围为[0, 1]。
通过双线性插值算法,可以从原图像中得到较为平滑和连续的放大效果,尤其适合放大小倍数的图像。
3. 双三次插值双三次插值是一种高阶插值算法,它通过对相邻16个像素点进行加权平均来计算目标像素点的值,得到较为细腻和柔和的放大效果。
在双三次插值算法中,P点的像素值可以通过如下公式计算得到:P = ΣΣh(i, u)h(j, v)I(i, j)其中,h(i, u)和h(j, v)分别表示水平和垂直方向上的插值权重,I(i, j)表示原图像中相邻的16个像素点。
抗锯齿算法 matlab

抗锯齿算法matlab
MATLAB中提供的抗锯齿算法包括:
1.双线性插值:双线性插值是图像缩放和旋转时最常用的抗锯齿算法。
它通过
在像素周围的邻近像素中线性插值来计算新像素的值。
2.三线性插值:三线性插值是双线性插值的改进版本。
它通过在像素周围的8
个邻近像素中三次线性插值来计算新像素的值。
3.双三次插值:双三次插值是三线性插值的进一步改进版本。
它通过在像素周
围的16个邻近像素中三次立方插值来计算新像素的值。
4.高斯滤波:高斯滤波通过对图像进行模糊处理来消除锯齿。
它使用高斯函数
来权衡像素周围的邻近像素的值。
5.中值滤波:中值滤波通过将像素周围的邻近像素的值排序并取中值来计算新
像素的值。
要使用MATLAB中的抗锯齿算法,可以使用以下函数:
1.imresize:用于缩放或旋转图像。
2.imfilter:用于对图像进行滤波处理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.数学模型对于一个目的像素,其坐标通过反向变换得到的在原图中的浮点坐标为(i+u,j+v),其中i、j均为非负整数,u、v为[0,1)区间的浮点数,双三次插值考虑一个浮点坐标(i+u,j+v)周围的16个邻点,目的像素值f(i+u,j+v)可由如下插值公式得到:f(i+u,j+v) = [A] * [B] * [C][A]=[ S(u + 1)S(u + 0)S(u - 1)S(u - 2) ]┏f(i-1, j-1)f(i-1, j+0)f(i-1, j+1)f(i-1, j+2) ┓[B]=┃f(i+0, j-1)f(i+0, j+0)f(i+0, j+1)f(i+0, j+2) ┃┃f(i+1, j-1)f(i+1, j+0)f(i+1, j+1)f(i+1, j+2) ┃┗f(i+2, j-1)f(i+2, j+0)f(i+2, j+1)f(i+2, j+2) ┛┏S(v + 1) ┓[C]=┃S(v + 0) ┃┃S(v - 1) ┃┗S(v - 2) ┛┏1-2*Abs(x)^2+Abs(x)^3, 0<=Abs(x)<1S(x)={4-8*Abs(x)+5*Abs(x)^2-Abs(x)^3, 1<=Abs(x)<2┗0, Abs(x)>=2S(x)是对Sin(x*Pi)/x 的逼近(Pi是圆周率——π),为插值核。
2.计算流程1. 获取16个点的坐标P1、P2……P162. 由插值核计算公式S(x) 分别计算出x、y方向的插值核向量Su、Sv3. 进行矩阵运算,得到插值结果iTemp1 = Su0 * P1 + Su1 * P5 + Su2 * P9 + Su3 * P13iTemp2 = Su0 * P2 + Su1 * P6 + Su2 * P10 + Su3 * P14iTemp3 = Su0 * P3 + Su1 * P7 + Su2 * P11 + Su3 * P15iTemp4 = Su0 * P4 + Su1 * P8 + Su2 * P12 + Su3 * P16iResult = Sv1 * iTemp1 + Sv2 * iTemp2 + Sv3 * iTemp3 + Sv4 * iTemp44. 在得到插值结果图后,我们发现图像中有“毛刺”,因此对插值结果做了个后处理,即:设该点在原图中的像素值为pSrc,若abs(iResult - pSrc) 大于某阈值,我们认为插值后的点可能污染原图,因此用原像素值pSrc代替。
3. 算法优化由于双三次插值计算一个点的坐标需要其周围16个点,更有多达20次的乘法及15次的加法,计算量可以说是非常大,势必要进行优化。
我们选择了Intel的SSE2优化技术,它只支持在P4及以上的机器。
测试当前CPU是否支持SSE2,可由CPUID指令得到,代码为:BOOL g_bSSE2 = FALSE;__asm{mov eax, 1;cpuid;test edx, 0x04000000;jz NotSupport;mov g_bSSE2, 1NotSupport:}支持SSE2的CPU引入了8个128位的寄存器,这样一个寄存器中就可以存放4个点(RGB),有利于并行计算。
详细代码见Transform.cpp中函数Optimize_Bicubic。
优化中遇到的问题:1. 图像每个点由RGB通道组成,由于1个SSE2寄存器有16个字节,这样读入4个像素点后,要浪费4个字节,同时要花费时间将数据对齐,即由BRGB | RGBR | GBRG | BRGB 对齐成0RGB | 0RGB | 0RGB | 0RGB ;2. 读16字节数据到寄存器时,由于图像地址不能保证是16字节对齐,因此需用更多时钟周期的MOVDQU指令(6个以上时钟周期);如能使地址16字节对齐,则可用MOVDQA 指令(1个时钟周期) ;3. 为了消除除法及浮点运算,对权值放大256倍,这样在计算插值核时,必须用2Bytes 来表示1个系数,而图像数据都是1Byte,这样在对齐做乘法时,要浪费一半的SSE2寄存器的空间,导致运算时间变长;而若降低插值核的精度,使其在1Byte表示范围内时,运算的精度又大为下降;4. 对各指令的周期以及若干行指令是否能够并行流水缺乏经验和认识。
附:SSE2指令整理算术(Arithmetic)指令:ADDPD--Packed Double-Precision Floating-Point Add SSE2 2个double对应相加ADDPD xmm0, xmm1/m128ADDPS--Packed Single-Precision Floating-Point Add SSE 4个float对应相加ADDPS xmm0, xmm1/m128ADDSD--Scalar Double-Precision Floating-Point Add1个double(低端)对应相加SSE2 ADDSD xmm0, xmm1/m64ADDSS--Scalar Single-Precision Floating-Point Add SSE 1个float(低端)对应相加ADDSS xmm0, xmm1/m32------------------------------------------------------------------------------------------------------DEST[63-0] DEST[31-0] * SRC[31-0]; PMULUDQ instruction with 128-Bit operands: DEST[63-0] DEST[31-0] * SRC[31-0]; DEST[127-64] DEST[95-64] * SRC[95-64];DEST[127-64] DEST[127-64] * SRC[127-64];DEST[63-32] DEST[63-32] * SRC[63-32]; DEST[95-64] DEST[95-64] * SRC[95-64]; DEST[127-96] DEST[127-96] * SRC[127-96];* DEST[127-64] remains unchanged *;* DEST[127-32] remains unchanged *;---------------------------------------------------------------------------------------------------------------------- DIVPD--Packed Double-Precision Floating-Point DivideDIVPD xmm0, xmm1/m128DEST[63-0] DEST[63-0] / (SRC[63-0]);DEST[127-64] DEST[127-64] / (SRC[127-64]);DIVPS--Packed Single-Precision Floating-Point DivideDIVPS xmm0, xmm1/m128DEST[31-0] DEST[31-0] / (SRC[31-0]);DEST[63-32] DEST[63-32] / (SRC[63-32]);DEST[95-64] DEST[95-64] / (SRC[95-64]);DEST[127-96] DEST[127-96] / (SRC[127-96]);DIVSD--Scalar Double-Precision Floating-Point DivideDIVSD xmm0, xmm1/m64DEST[63-0] DEST[63-0] / SRC[63-0];* DEST[127-64] remains unchanged *;DIVSS--Scalar Single-Precision Floating-Point DivideDIVSS xmm0, xmm1/m32DEST[31-0] DEST[31-0] / SRC[31-0];* DEST[127-32] remains unchanged *;----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------DEST[63-32] APPROXIMATE(1.0/(SRC[63-32]));DEST[95-64] APPROXIMATE(1.0/(SRC[95-64]));DEST[127-96] APPROXIMATE(1.0/(SRC[127-96]));* DEST[127-32] remains unchanged *;DEST[63-32] APPROXIMATE(1.0/SQRT(SRC[63-32]));DEST[95-64] APPROXIMATE(1.0/SQRT(SRC[95-64]));DEST[127-96] APPROXIMATE(1.0/SQRT(SRC[127-96]));* DEST[127-32] remains unchanged *;移动(Move)指令:MASKMOVDQU--Mask Move of Double Quadword Unaligned MASKMOVDQU xmm0, xmm1MASKMOVQ--Mask Move of QuadwordMASKMOVQ mm0, mm1MOV APD--Move Aligned Packed Double-Precision Floating-Point Values MOV APD xmm0, xmm1/m128MOV APD xmm1/m128, xmm0MOV APS--Move Aligned Packed Single-Precision Floating-Point Values MOV APS xmm0, xmm1/m128DEST[127-64] 00000000000000000H;* DEST[127-64] unchanged *;DEST[127-64] SRC ;* DEST[63-0] unchanged *;MOVHPD instruction for XMM to memory move:DEST SRC[127-64] ;MOVMSKPD - Extract Packed Double-Precision Floating-Point Sign Mask MOVMSKPD r32, xmmDEST[0] SRC[63];DEST[1] SRC[127];DEST[3-2] 00B;DEST[31-4] 0000000H;MOVMSKPS - Extract Packed Single-Precision Floating-Point Sign Mask MOVMSKPS r32, xmmDEST[0] SRC[31];DEST[1] SRC[63];DEST[1] SRC[95];DEST[1] SRC[127];DEST[31-4] 000000H;which is assumed to contain integer data (packed bytes, words, doublewords, or quadwords). MOVNTPD--Move Packed Double-Precision Floating-Point Valuesr32[0] SRC[7];r32[1] SRC[15];* repeat operation for bytes 2 through 6;r32[7] SRC[63];r32[31-8] 000000H;PMOVMSKB instruction with 128-bit source operand: r32[0] SRC[7];r32[1] SRC[15];* repeat operation for bytes 2 through 14;r32[15] SRC[127];r32[31-16] 0000H;比较(Compare)指令:CMPPD--Compare Packed Double-Precision Floating-Point Values SSE2CMPPS--Compare Packed Single-Precision Floating-Point Values SSECMPSD--Compare Scalar Double-Precision Floating-Point Value SSE2 1个double(低端)对应比较大小CMPSS--Compare Scalar Single-Precision Floating-Point Values SSE1个float(低端)对应比较大小COMISD--Compare Scalar Ordered Double-Precision Floating-Point Values and Set EFLAGSSSE2 COMISS--Compare Scalar Ordered Single-Precision Floating-Point Values and Set EFLAGSSSE MAXPD--Maximum Packed Double-Precision Floating-Point Values MAXPD xmm0, xmm1/m128MAXPS--Maxiumum Packed Single-Precision Floating-Point Values MAXPD xmm0, xmm1/m128MAXSD--Maximum Scalar Double-Precision Floating-Point Value MAXSD xmm0, xmm1/m64MAXSS--Maximum Scalar Single-Precision Floating-Point Value MAXSS x mm0, xmm1/m32MINPD--Packed Double-Precision Floating-Point MinimumMINPD xmm0, xmm1/m128MINPS--Minimum Packed Single-Precision Floating-Point Values MINPS xmm0, xmm1/m128MINSD--Minimum Scalar Double-Precision Floating-Point Value MINSD xmm0, xmm1/m64MINSS--Minimum Scalar Single-Precision Floating-Point Value MINSS xmm0, xmm1/m32逻辑(Logic)指令:ANDNPD--Bitwise Logical AND NOT of Packed Double-Precision Floating-Point Values SSE216字节(2个double),oprand1先非,再与oprand2按位与ANDNPD xmm0, xmm1/m128ANDNPS--Bit-wise Logical And Not For Single-FP SSE 16字节(4个float), oprand1先非,再与oprand2按位与ANDNPS xmm0, xmm1/m128ANDPD--Bitwise Logical AND of Packed Double-Precision Floating-Point ValueSSE2 16字节(2个double),oprand1与oprand2按位与ANDPD xmm0, xmm1/m128ANDPS--Bitwise Logical AND of Packed Single-Precision Floating-Point ValuesSSE 16字节(4个float), oprand1与oprand2按位与ANDPS xmm0,xmm1/m128DEST (NOT DEST) AND SRC;specified in the count operand (second operand). The empty high-order bytes are cleared (set to all 0s). If the value specified by the count operand is greater than 15, the destination operand is set to all 0s. The destination operand is an XMM register. The count operand is an 8-bit immediate.转换(Convert)指令:CVTDQ2PD--Convert Packed Signed Doubleword Integers to Packed Double-Precision Floating-Point Values SSE2 CVTDQ2PD xmm0, xmm1/m64DEST[63-0]Convert_Integer_To_Double_Precision_Floating_Point(SRC[31-0]); DEST[127-64]Convert_Integer_To_Double_Precision_Floating_Point(SRC[63-32]); CVTDQ2PS--Convert Packed Signed Doubleword Integers to PackedSingle-Precision Floating-Point ValuesCVTDQ2PS xmm0,xmm1/m128DEST[31-0] Convert_Integer_To_Single_Precision_Floating_Point(SRC[31-0]); DEST[63-32] Convert_Integer_To_Single_Precision_Floating_Point(SRC[63-32]); DEST[95-64] Convert_Integer_To_Single_Precision_Floating_Point(SRC[95-64]); DEST[127-96]Convert_Integer_To_Single_Precision_Floating_Point(SRC[127-96]);CVTPD2DQ--Convert Packed Double-Precision Floating-Point Values to Packed Doubleword IntegersCVTPD2DQ xmm0, xmm1/m128DEST[31-0] Convert_Double_Precision_Floating_Point_To_Integer(SRC[63-0]); DEST[63-32]Convert_Double_Precision_Floating_Point_To_Integer(SRC[127-64]);DEST[127-64] 0000000000000000H;CVTPD2PI--Convert Packed Double-Precision Floating-Point to PackedDoubleword IntegersCVTPD2PI mm, xmm0/m128DEST[31-0] Convert_Double_Precision_Floating_Point_To_Integer(SRC[63-0]); DEST[63-32]Convert_Double_Precision_Floating_Point_To_Integer(SRC[127-64]);CVTPD2PS--Covert Packed Double-Precision Floating-Point Values to Packed Single-Precision Floating-Point ValuesCVTPD2PS xmm0, xmm1/m128DEST[31-0]Convert_Double_Precision_To_Single_Precision_Floating_Point(SRC[63-0]); DEST[63-32]Convert_Double_Precision_To_Single_Precision_Floating_Point(SRC[127-64]); DEST[127-64] 0000000000000000H;CVTPI2PD--Convert Packed Doubleword Integers to Packed Double-Precision Floating-Point ValuesCVTPI2PD xmm0, mm/m64DEST[63-0] Convert_Integer_To_Double_Precision_Floating_Point(SRC[31-0]); DEST[127-64]Convert_Integer_To_Double_Precision_Floating_Point(SRC[63-32]);CVTPI2PS--Convert Packed Doubleword Integers to Packed Single-Precision Floating-Point ValuesCVTPI2PS xmm0, mm/m64DEST[31-0] Convert_Integer_To_Single_Precision_Floating_Point(SRC[31-0]); DEST[63-32] Convert_Integer_To_Single_Precision_Floating_Point(SRC[63-32]); * high quadword of destination remains unchanged *;CVTPS2DQ--Convert Packed Single-Precision Floating-Point Values to Packed Doubleword IntegersCVTPS2DQ xmm0, xmm1/m128DEST[31-0] Convert_Single_Precision_Floating_Point_To_Integer(SRC[31-0]); DEST[63-32] Convert_Single_Precision_Floating_Point_To_Integer(SRC[63-32]); DEST[95-64] Convert_Single_Precision_Floating_Point_To_Integer(SRC[95-64]); DEST[127-96]Convert_Single_Precision_Floating_Point_To_Integer(SRC[127-96]);CVTPS2PD--Covert Packed Single-Precision Floating-Point Values to Packed Double-Precision Floating-Point ValuesCVTPS2PD xmm0,xmm1/m64DEST[63-0]Convert_Single_Precision_To_Double_Precision_Floating_Point(SRC[31-0]); DEST[127-64]Convert_Single_Precision_To_Double_Precision_Floating_Point(SRC[63-32]); CVTPS2PI--Convert Packed Single-Precision Floating-Point Values to Packed Doubleword IntegersCVTPS2PI mm,xmm/m64DEST[31-0] Convert_Single_Precision_Floating_Point_To_Integer(SRC[31-0]); DEST[63-32] Convert_Single_Precision_Floating_Point_To_Integer(SRC[63-32]); CVTSD2SI--Convert Scalar Double-Precision Floating-Point Value toDoubleword Integer with TruncationCVTSD2SI rg32,xmm/m64DEST[31-0] Convert_Double_Precision_Floating_Point_To_Integer(SRC[63-0]); CVTSD2SS--Convert Scalar Double-Precision Floating-Point Value to Scalar Single-Precision Floating-Point ValueCVTSD2SS xmm0, xmm1/m64DEST[31-0]Convert_Double_Precision_To_Single_Precision_Floating_Point(SRC[63-0]);* DEST[127-32] remains unchanged *;CVTSI2SD--Convert Doubleword Integer to Scalar Double-PrecisionFloating-Point ValueCVTSI2SD xmm, r/m32DEST[63-0] Convert_Integer_To_Double_Precision_Floating_Point(SRC[31-0]); * DEST[127-64] remains unchanged *;CVTSI2SS--Convert Doubleword Integer to Scalar Single-PrecisionFloating-Point ValueCVTSI2SS xmm, r/m32DEST[31-0] Convert_Inteter_To_Single_Precision_Floating_Point(SRC[31-0]);* DEST[127-32] remains unchanged *;CVTSS2SD--Convert Scalar Single-Precision Floating-Point Value to Scalar Double-Precision Floating-Point ValueCVTSS2SD xmm0, xmm1/m32DEST[63-0]Convert_Single_Precision_To_Double_Precision_Floating_Point(SRC[31-0]);* DEST[127-64] remains unchanged *;CVTSS2SI--Convert Scalar Single-Precision Floating-Point Value to Doubleword IntegerCVTSS2SI r32, xmm/m64DEST[31-0] Convert_Single_Precision_Floating_Point_To_Integer(SRC[31-0]); CVTTPD2DQ--Convert Packed Double-Precision Floating-Point Values toPacked Doubleword Integers with TruncationCVTTPD2DQ xmm0, xmm1/m128DEST[31-0]Convert_Double_Precision_Floating_Point_To_Integer_Truncate(SRC[63-0]); DEST[63-32]Convert_Double_Precision_Floating_Point_To_Integer_Truncate(SRC[127-64]); DEST[127-64] 0000000000000000H;CVTTPD2PI--Convert Packed Double-Precision Floating-Point Values to Packed Doubleword Integers with TruncationCVTTPD2PI mm, xmm/m128DEST[31-0]Convert_Double_Precision_Floating_Point_To_Integer_Truncate(SRC[63-0]); DEST[63-32]Convert_Double_Precision_Floating_Point_To_Integer_Truncate(SRC[127-64]); CVTTPS2DQ--Convert Packed Single-Precision Floating-Point Values to Packed Doubleword Integers with TruncationCVTTPS2DQ xmm0, xmm1/m128DEST[31-0]Convert_Single_Precision_Floating_Point_To_Integer_Truncate(SRC[31-0]);DEST[63-32]Convert_Single_Precision_Floating_Point_To_Integer_Truncate(SRC[63-32]); DEST[95-64]Convert_Single_Precision_Floating_Point_To_Integer_Truncate(SRC[95-64]); DEST[127-96]Convert_Single_Precision_Floating_Point_To_Integer_Truncate(SRC[127-96]); CVTTPS2PI--Convert Packed Single-Precision Floating-Point Values to Packed Doubleword Integers with TruncationCVTTPS2PI mm, xmm/m64DEST[31-0]Convert_Single_Precision_Floating_Point_To_Integer_Truncate(SRC[31-0]);DEST[63-32]Convert_Single_Precision_Floating_Point_To_Integer_Truncate(SRC[63-32]);CVTTSD2SI--Convert Scalar Double-Precision Floating-Point Value to Signed Doubleword Integer with TruncationCVTTSD2SI r32,mmx/m64DEST[31-0]Convert_Double_Precision_Floating_Point_To_Integer_Truncate(SRC[63-0]); CVTTSS2SI--Convert Scalar Single-Precision Floating-Point Value toDoubleword Integer with TruncationCVTTSS2SI r32, xmm/m32DEST[31-0]Convert_Single_Precision_Floating_Point_To_Integer_Truncate(SRC[31-0]);打包解包(pack、unpack)指令:DEST[79-64] (SRC >> (ORDER[1-0] * 16) )[79-64]DEST[95-80] (SRC >> (ORDER[3-2] * 16) )[79-64]DEST[111-96] (SRC >> (ORDER[5-4] * 16) )[79-64]DEST[127-112] (SRC >> (ORDER[7-6] * 16) )[79-64]DEST[31-16] (SRC >> (ORDER[3-2] * 16) )[15-0]DEST[47-32] (SRC >> (ORDER[5-4] * 16) )[15-0]DEST[63-48] (SRC >> (ORDER[7-6] * 16) )[15-0]PUNPCKHBW/PUNPCKHWD/PUNPCKHDQ/PUNPCKHQDQ--PUNPCKLBW/PUNPCKLWD/PUNPCKLDQ/PUNPCKLQDQ--Moves either of the two packed double-precision floating-point values from destination operand (first operand) into the low quadword of the destination operand; moves either of the two packed double-precision floating-point values in the source operand into to the high quadword of the destination operand (see Figure 3-16). The select operand (third operand) determines which values are moved to the destinationThe source operand can be an XXM register or a 128-bit memory location. The destination operand is an XMM register. The select operand is an 8-bit immediate: bit 0 selects which value is moved from the destination operand to the result (where 0 selects the low quadword and 1 selects the high quadword) and bit 1 selects which value is moved from the source operand to the result. Bits 3 through 7 of the shuffle operand are reserved.OperationIF SELECT.0 == 0THEN DEST[63-0] DEST[63-0];ELSE DEST[63-0] DEST[127-64]; FI;IF SELECT.1 == 0THEN DEST[127-64] SRC[63-0];ELSE DEST[127-64] SRC[127-64]; FI;Moves two of the four packed single-precision floating-point values from destination operand (first operand) into the low quadword of the destination operand; moves two of the four packed single-precision floating-point values in the source operand into tothe high quadword of the destination operand (see Figure 3-17). The select operandThe source operand can be an XXM register or a 128-bit memory location. The destination operand is an XMM register. The select operand is an 8-bit immediate: bits 0 and 1 select the value to be moved from the destination operand the low doubleword of the result, bits 2 and 3 select the value to be moved from the destination operand the second doubleword of the result, bits 4 and 5 select the value to be moved from the source operand the third doubleword of the result, and bits 6 and 7 select the value to be moved from the source operand the high doubleword of the result.OperationCASE (SELECT.[1-0]) OF0: DEST[31-0] DEST[31-0];1: DEST[31-0] DEST[63-32];2: DEST[31-0] DEST[95-64];3: DEST[31-0] DEST[127-96];ESAC;CASE (SELECT.[3-2]) OF0: DEST[63-32] DEST[31-0];1: DEST[63-32] DEST[63-32];2: DEST[63-32] DEST[95-64];3: DEST[63-32] DEST[127-96];ESAC;CASE (SELECT.[5-4]) OF0: DEST[95-64] SRC[31-0];1: DEST[95-64] SRC[63-32];2: DEST[95-64] SRC[95-64];3: DEST[95-64] SRC[127-96];ESAC;CASE (SELECT.[7-6]) OF0: DEST[127-96] SRC[31-0];1: DEST[127-96] SRC[63-32];2: DEST[127-96] SRC[95-64];3: DEST[127-96] SRC[127-96];ESAC;DEST[127-64] SRC[127-64];DEST[31-0] DEST[95-64]; DEST[63-32] SRC[95-64]; DEST[95-64] DEST[127-96]; DEST[127-96] SRC[127-96];DEST[63-0] DEST[63-0]; DEST[127-64] SRC[63-0];DEST[31-0] DEST[31-0]; DEST[63-32] SRC[31-0]; DEST[95-64] DEST[63-32]; DEST[127-96] SRC[63-32];其他指令:EMMS--Empty MMX(TM) Technology State。