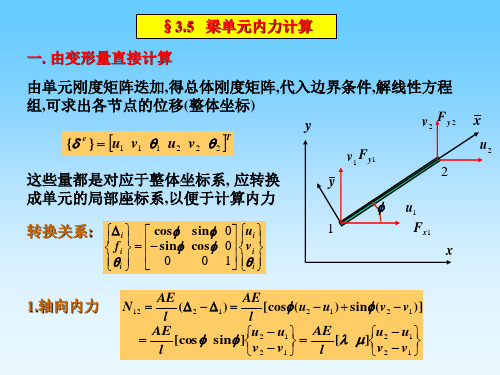
《有限元导论》弹簧单元与梁单元实例计算
弹簧单元与梁单元实例计算

弹簧单元与梁单元实例计算1.绪论有限元法也叫有限单元法(finite element method, FEM),是随着电子计算机的发展而迅速发展起来的一种弹性力学问题的数值求解方法。
五十年代初,它首先应用于连续体力学领域—飞机结构静、动态特性分析中,用以求得结构的变形、应力、固有频率以及振型。
由于这种方法的有效性,有限单元法的应用已从线性问题扩展到非线性问题,分析的对象从弹性材料扩展到塑性、粘弹性、粘塑性和复合材料,从连续体扩展到非连续体。
关键词:有限元方法,数值求解,动态分析2.有限元方法2.1有限元法概述有限元法是把要分析的连续体假想地分割成有限个单元所组成的组合体,简称离散化。
这些单元仅在顶角处相互联接,称这些联接点为结点。
离散化的组合体与真实弹性体的区别在于:组合体中单元与单元之间的联接除了结点之外再无任何关联。
但是这种联接要满足变形协调条件,即不能出现裂缝,也不允许发生重叠。
显然,单元之间只能通过结点来传递内力。
通过结点来传递的内力称为结点力,作用在结点上的荷载称为结点荷载。
当连续体受到外力作用发生变形时,组成它的各个单元也将发生变形,因而各个结点要产生不同程度的位移,这种位移称为结点位移。
在有限元中,常以结点位移作为基本未知量。
并对每个单元根据分块近似的思想,假设一个简单的函数近似地表示单元内位移的分布规律,再利用力学理论中的变分原理或其他方法,建立结点力与位移之间的力学特性关系,得到一组以结点位移为未知量的代数方程,从而求解结点的位移分量。
然后利用插值函数确定单元集合体上的场函数。
显然,如果单元满足问题的收敛性要求,那么随着缩小单元的尺寸,增加求解区域内单元的数目,解的近似程度将不断改进,近似解最终将收敛于精确解。
2.2有限元法的优点1、物理概念浅显清晰,易于掌握。
有限元法不仅可以通过非常直观的物理解释来被掌握,而且可以通过数学理论严谨的分析掌握方法的本质。
2、描述简单,利于推广。
“有限元法基础及应用”补充义

“有限元法基础及应用”补充讲义一、弹簧单元与弹簧系统1、 弹簧单元分析 1)单元描述弹性系统受力平衡时,从中隔离出一个典型弹簧单元进行分析。
单元节点编号:j i ,节点位移(基本未知量):j i u u ,单元节点力(单元在节点处受到的作用力):j i f f ,已知弹簧的物理特性:∆⋅=k F其中:为弹簧力(拉伸为正)为弹簧伸长量,为弹簧刚度F u u k i j -=∆, 2)建立弹簧单元的有限元特性方程考虑弹簧元在系统中变形平衡时的条件:力平衡条件和弹簧物理特性,得到下列方程:ji i j j j i i j i ku ku u u k F f ku ku u u k F f +-=-==-=--=-=)()(写成矩阵形式:⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡--=⎭⎬⎫⎩⎨⎧j i j i u u k k k k f f 上式的矩阵符号形式为:kd f =方程(1-2)或(1-3)称为弹簧单元的刚度方程,反映了单元特性,即节点力~节点位移之间的关系。
式(1-3)中:称为单元节点力列阵称为单元节点位移列阵称为单元刚度矩阵,,,⎭⎬⎫⎩⎨⎧=⎭⎬⎫⎩⎨⎧=⎥⎦⎤⎢⎣⎡--=j i j i f f u u k k k k f d k(1-1)(1-2)(1-3)3)弹簧单元刚度方程的讨论a. 有何特点?k对称、奇异、主对角元素恒正。
b . 么?中元素的物理意义是什k刚度矩阵元素的大小等于弹簧刚度。
从对方程(1-2)分析的分析可以看出,矩阵中某列的各元素代表列序号对应节点有单位位移,其它节点位移为零时,单元各节点上的节点力;某行的各元素分别是单元各节点的位移对行序号对应节点的节点力贡献系数。
因此,矩阵中任意一个元素ij k 的物理意义是:j 节点的位移对i 节点的节点力贡献系数,或者j 节点有单位位移,其他节点位移为零时,i 节点上的节点力。
c. 单元刚度方程可以求解吗?为什么?不可以。
单元刚度方程仅仅表征一个单元的力学特性,单元水平上无法确定单元节点位移。
有限元分析梁单元内力计算
1.385 0 3.462 1.385 0 3.462 0 0 0
0 252 0 0 252 0 0 0 0
3.462 0 11.541 3.462 0 5.711 0 0 0
K
103
1.385 0
0 252
3.462 0
253.385 0 0 253.385
3.462 3.462
py3 m3
px3
6.25
5.208
py3 m3
6. 引入约束条件, 构成总体方程
2 px1 p y1
2.5 m1 3
4.25
1.385
0
3.462
103
1.385 0
0 252 0 0 252
3.462 0
11.541 3.462
0
1.385 0
0
0 1.385 3.462 0 1.385 3.462
[
K112
]
[
K
2 23
]
103
0 252
3.462 0
11.542 0
0 252
3.462 0
5.771 0
0 1.385 3.462 0 1.385 3.462
0 3.462 5.771 0 3.462 11.542
3. 单元刚度矩阵的座标变换
求:每根梁的内力。
P2 1kN P1 4kN
2.5m
解:
1.建座标系,对梁单元各节点编号 如图所示。
2.5m
2单元,三节点系统(即自然划分。也可以在集中 力作用处设一节点)。由于每一节点有3个自由度 ,故系统有9个自由度。总刚度矩阵[K]为9×9阶
y 2
5m
②3
有限元第一讲 绪论、弹簧单元
1 绪论
一、有限元是什么?
一般意义上,有限元法是一种求解连续介质、连续 场力学和物理问题的数值方法。是工程分析和科学
研究的重要工具。
该方法诞生于结构应力分析,目前广泛应用于固体 力学、流体力学、传热学、电磁场等连续域问题的 领域以及计算数学。
该方法的发展和推广应用与计算机密切相关。
2个节点:
i, j
ui知弹簧力——位移关系:
节点位移:
节点力: 弹簧刚度:
F k
F 弹簧力,拉伸为正
u j ui — 弹簧伸长
k
考虑弹簧的特性和平衡关系有:
f i F k (u j ui ) kui ku j
f j F k (u j ui ) kui ku j
由于单元可以有不同的大小,形状和类型,因此可以求解复杂的工
程和科学问题。
2、数学上的理解
通过把求解区域剖分成数目有限的子区域(单元),设置节点上
的待求函数值(位移)为问题的基本未知量。在每个单元内用插值
的方法,根据待定节点位移假设出单元上简单位移分布,从而把一 个求解连续位移场的无限自由度问题转变成求解离散节点上位移值
(d):弹簧2内力
200 3 2 200( N )
F k2 k2 (u3 u2 )
2 2
(拉力)
4、练习题
对图示弹簧系统,求其总刚度矩阵
解
七、第一章要点回顾
1、弹簧单元刚度方程的建立 弹簧变形平衡
f i F k (u j ui ) kui ku j f j F k (u j ui ) kui ku j
“有限元法基础及应用”补充义
“有限元法基础及应用”补充讲义一、弹簧单元与弹簧系统1、 弹簧单元分析 1)单元描述弹性系统受力平衡时,从中隔离出一个典型弹簧单元进行分析。
单元节点编号:j i ,节点位移(基本未知量):j i u u ,单元节点力(单元在节点处受到的作用力):j i f f ,已知弹簧的物理特性:∆⋅=k F其中:为弹簧力(拉伸为正)为弹簧伸长量,为弹簧刚度F u u k i j -=∆, 2)建立弹簧单元的有限元特性方程考虑弹簧元在系统中变形平衡时的条件:力平衡条件和弹簧物理特性,得到下列方程:ji i j j j i i j i ku ku u u k F f ku ku u u k F f +-=-==-=--=-=)()(写成矩阵形式:⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡--=⎭⎬⎫⎩⎨⎧j i j i u u k k k k f f 上式的矩阵符号形式为:kd f =方程(1-2)或(1-3)称为弹簧单元的刚度方程,反映了单元特性,即节点力~节点位移之间的关系。
式(1-3)中:称为单元节点力列阵称为单元节点位移列阵称为单元刚度矩阵,,,⎭⎬⎫⎩⎨⎧=⎭⎬⎫⎩⎨⎧=⎥⎦⎤⎢⎣⎡--=j i j i f f u u k k k k f d k(1-1)(1-2)(1-3)3)弹簧单元刚度方程的讨论a. 有何特点?k对称、奇异、主对角元素恒正。
b . 么?中元素的物理意义是什k刚度矩阵元素的大小等于弹簧刚度。
从对方程(1-2)分析的分析可以看出,矩阵中某列的各元素代表列序号对应节点有单位位移,其它节点位移为零时,单元各节点上的节点力;某行的各元素分别是单元各节点的位移对行序号对应节点的节点力贡献系数。
因此,矩阵中任意一个元素ij k 的物理意义是:j 节点的位移对i 节点的节点力贡献系数,或者j 节点有单位位移,其他节点位移为零时,i 节点上的节点力。
c. 单元刚度方程可以求解吗?为什么?不可以。
单元刚度方程仅仅表征一个单元的力学特性,单元水平上无法确定单元节点位移。
《有限元分析基础教程》(曾攀)笔记二-梁单元有限元方程推导

《有限元分析基础教程》(曾攀)笔记⼆-梁单元有限元⽅程推导不得不说,Mathematica 真是个好东西,以前学习有限元的时候,对于书中的⽅程推导,看到了就看过去了,从没有想过要⾃⼰推导⼀遍,原因是⼿⼯推导太复杂。
有了MM ,原来很复杂的东西突然变得简单了。
1.单元⼏何描述上图是纯弯梁单元,长度l ,弹模E ,⾯积A ,惯性矩I 。
两个节点1和2的位移列阵为q e =[v 1,θ1,v 2,θ2]Tv 是挠度(defection),或者叫位移;θ是转⾓(slope)。
需注意的是v 和θ的⽅向,⼀个是向上,⼀个是逆时针。
两个节点的节点⼒矩阵为P e =[P v 1,M 1,P v 2,M 2]T当然实际情况往往是在梁的长度⽅向上作⽤有荷载,⽽不是只在节点处有,这时就要进⾏荷载等效,后⾯会有说明。
注意这两个矩阵都是列矩阵。
需要注意的是,节点⼒矩阵表⽰的的是节点上的所有的⼒,不仅包括荷载引起的等效节点⼒,还包括节点的反⼒,反⼒矩等。
2.单元位移场表达由于有4个位移节点的已知条件,那么假设纯弯曲梁单元的位移挠度函数具有四个待定系数,如下形式v (x )=a 0+a 1x +a 2x 2+a 3x 3对于两端节点,位移和转⾓分别为v 1,θ1,v 2,θ2,注意挠曲线⽅程在⼀点出的导数值即为改点的转⾓,所以四个边界条件为v (0)=v 1v ′(0)=θ1v (L )=v 2v ′(L )=θ2使⽤MM 求解⽅程组将求得的待定系数带⼊原⽅程,可得将四个位移合并同类项,可以得到即最终的挠曲线⽅程vfea 为 vfea =θ1x 3L 2−2x 2L +x +θ2x 3L 2−x 2L +v12x 3L 3−3x 2L 2+1+v23x 2L 2−2x 3L 3如果令ζ=x L ,上式中位移前的系数组成的矩阵称之为形函数矩阵,也就是常说的形函数。
即v (x )=N (x )q e 3.单元应变场,应⼒场的表达应变的表达式为ε=−yv ″其中B(x)=-yN''(x),B(x)叫做单元的⼏何矩阵,表⽰应变与位移的⼏何关系。
有限元求解过程

Keae Fe [形式上与前面的一维弹簧相同]
e
e
与 1.2 节同样的思路可组集得到二维有限元的总体求解方
程 K a F ,其中 a 为 n 个结点的待求位移 ui ,vi
求解上述方程即可得到 n 个结点的位移 ui ,vi
(2)有限元求解的建模过程
绘制几何模型 施加位移边界条件 施加外力边界条件 建立材料库 选择本构模型 划分单元网格 计算求Байду номын сангаас 后处理及结果分析 ……
有限单元法求解基本过程
1 一维弹簧 1.1 弹簧单元方程
其中结点 1 和结点 2 的位移 u1, u2 为待求的基本未知量。
上述方程可进一步改写为:
求解此方程即可得到结点 1 和结点 2 的位移 u1, u2
1.2 多弹簧实例
该计算模型划分有结点 1、结点 2、结点 3、结点 4 共四个结点,相应的待求未知量为各结点的位
2 二维有限元分析示例
y x p
L
D
(1)有限元求解的基本思路(在有限元法课程中将详细讲述)
将该分析物体离散成单元网格
在每个单元上利用该单元各结点的位移 ui ,vi 得到单元
的插值函数 u Niui
根据最小势能与弹性力学基本方程的等价性,可推导得出
以 单元的 结点 位移 ui ,vi 为 未知 量的单 元刚 度方程
移 u1、u2、u3、u4 。
(1)各单元方程
将上述各单元按刚度贡献组集成一个整体刚度矩阵 K
(2)各结点自由度上的外力荷载贡献
组集即可得到整体荷载列阵 F
(3)各结点待求解的自由度向量
(4)总体求解方程
设四个弹簧的刚度均为 k (e) ,则本问题的总体求解方程为:
第二章-杆和梁结构的有限元法案例
第二章
杆和梁结构的有限元法
§2.1.2 弹簧系统分析
注意: 上述弹簧系统的分析求解原理和过程就是有限元 法求解连续体力学问题时对离散后系统的分析求 解原理和过程。
第二章
杆和梁结构的有限元法
§2.1.2 弹簧系统分析
例题1:弹簧系统
已知条件:
求:(a) 系统总刚度矩阵 (b) 节点2,3的位移
单元特性
系统平衡方程
第二章 杆和梁结构的有限元法
KD F
2)单元方程扩大相加法 单元特性
F1 f11
相加
F2 f 21 f12 F3 f 22
系统节点 平衡条件
引入系统节点平衡条件
KD F
系统节点平衡方程
第二章 杆和梁结构的有限元法
2.2 杆单元和平面桁架
杆单元
2.2.1 一维等截面 杆单元
fi k f j k
第二章
k ui k u j
f kd
杆和梁结构的有限元法
2、弹簧系统的集成 1)列节点平衡方程法
F1 f11 F2 f 21 f12 F3 f 22
系统节点 平衡条件
F1 k1u1 k1u2 F2 k1u1 ( k1 k2 )u2 k2u3 F3 k2u2 k2u3
第二章 杆和梁结构的有限元法
k k k
k k
fi k f j k
k ui k u j
kii k k ji
kij k jj
§2.1.2 弹簧系统分析
求解一个弹簧系统:
1)各单元的特性分别为:
第二章 杆和梁结构的有限元法
基于有限元分析软件的弹簧、质量、阻尼振动系统的瞬态动力分析

基于有限元分析软件的弹簧、质量、阻尼振动系统的瞬态动力分析本文对振动系统瞬态动力学分析方法进行了阐述。
以有限元分析软件ANSYS 10.0作为平台,对弹簧、质量、阻尼系统进行瞬态动力学求导与分析,详细论述了分析的过程,结果与理论分析吻合得很好。
本文的研究可以为制造业的信息化过程提供一定的参考。
0 振动力学简介振动是一种运动形态,是指物体在平衡位置附近作往复运动。
从广义上讲,如果表征一种运动的物理量作时而增大时而减小的反复变化,就可以称这种运动为振动。
如果变化的物理量是一些机械量或力学量,例如物体的位移、速度,加速度、应力及应变等等,这种振动便称为机械振动。
振动力学是指借助数学、物理、实验和计算技术,探讨各种振动现象,阐明振动的基本规律,以便克服振动的消极因素,利用其积极因素,为合理解决各种振动问题提供理论依据的一门科学。
振动是普遍存在的物理现象,是受外界激励而使系统包含的质量、弹性、阻尼等元件对外界激励的响应。
在所有科学领域和日常生活中都会遇到各种不同程度的振动,基于振动对工业生产的重要影响,国内外许多学者在此领域进行了大量的研究。
在机械结构的动力学特性研究上主要体现在以下几方面:(1) 建立振动模型;(2) 确定结构系统的动态特性;(3) 采用非比例阻尼方法准确估计系统的阻尼矩阵;(4) 基于实验数据结构的有限元模型修正等方面。
1 振动系统瞬态动力学分析方法图1 振动模型关系图一般振动问题是由振动系统、激励和响应三部分组成,三者间的关系可表示为如图1所示。
振动问题的研究对象即为振动系统,外界激振力等因素叫做激励(输入),作用于系统使之产生振动响应(输出)。
振动问题就是从以上三者中,已知两个量来求解另一个参数。
瞬态动力学分析(也称时间历程分析)是用于确定承受任意的随时间变化载荷的结构的动力学响应的一种方法。
可以用瞬态动力学分析确定结构在静载荷,瞬态载荷和简谐载荷的任意组合下的随时间变化的位移、应变、应力及力。
有限元第一讲 弹性力学基础理论

k
2 23
k323
kk111111
k112 k112
0 0
0
0 0
0 0 0
0
k
2 22
k
2 23
0
k
2 32
k
2 33
第一单元矩阵
第二单元矩阵
1.2.3.方程求解(约束条件的引入)
由前面可知,刚度矩阵是奇异阵,它的行列式值为0.矩阵的 逆不存在。故对应的线性方程组无定解,为什么?
FF43
1500 1500
11550000uu43
对弹簧1-2
对弹簧2-3
对弹簧3-4
1.2.5.实例
叠加这些方程为总的结构矩阵方程:
F1 ? 1200
FF32 F4
10 20 ?
答案是肯定的。
下面加以推导,每个弹簧单元的受力方程和单元 刚度矩阵如下:
FF12
ka ka
单元1
ka ka
uu12
FF32
kb kb
kb kb
uu32
单元2
1.2.2.组合弹簧的刚度矩阵
10 3000 20 1800
1800
3300
uu32
解得:u2=0.0103603m;u3=0.0117117m。将u1、u2、u3和u4代 入原方程可解得节点1和节点4处的作用力:
F1=-12.432KN;F4=-17.567KN
校核:F1+F4=-29.999KN=30KN。
有限元受力分析结构梁力计算
目录.绪论 (2)第一章.有限元课程设计 (4)一.工程问题 (4)二.简化模型 (4)三.解析法求解 (5)四.ANSYS求解 (8)五.结果分析 (19)第二章.机械优化设计说明 (20)一.题目及解析 (20)二.黄金分割法计算框图 (23)三.C语言程序 (24)四.运行结果 (27)五.结果分析 (27)第三章.设计感言 (28)第四章.参考文献 (28)前言有限元法在解决圣维南扭转问题近似解时首先提出的。
有限元在弹性力学平面问题的第一个成功应用是由美国学者于1956年解决飞机结构强度时提出的、经过几十年得发展,有限元一惊成为现代结构分析得有效方法和主要手段。
它的应用已经从弹性力学的平面问题扩展到空间问题和板壳问题。
对于有限元法,从选择基本未知量的角度来看,他可以分为三种方法:位移法,力法,混合法。
从推导方法来看,它可以分为直线法,变分法,加权余数法。
但随后随着计算机的发展,有限元法如虎添翼。
国内外已有许多大型通用的有限元分析程序,并已经出现了将人工智能技术引入有限元分析软件,形成了比较完善得专家系统,逐步实现了有限元的智能化。
优化设计是现代设计方法的重要内容之一。
它以数学规划为理论基础以电子计算机为工具,在充分考虑多种设计约束的前提下,寻求满足预订目标的最佳设计。
优化设计理论于方法用于工程设计是在六十年代后期开始的,特别是今年来,随着有限元素法,可靠性设计,计算机辅助设计的理论与发展及优化设计方法的综合应用使整个工程设计过程逐步向自动化集成化智能化发展,其前景使令人鼓舞的。
因而工程设计工作者必须适应这种发展变化,学习,掌握和应用优化设计理论与方法。
今年来随着计算机技术的普及和计算速度的不断提高,有限元分析在工程设计和分析中得到了越来越广泛的重视,已经成为解决复杂的工程分析计算问题的有效途径,现在从汽车到航天飞机几乎所有的机械制造都已离不开有限元分析计算,其再机械制造,材料加工,航空航天,汽车,土木建筑,电子电器,国防军土,船舶,铁道,石化能源,科学研究等各个领域的广泛使用已使设计水平发生了质的飞跃,主要表现在以下几个方面:增加产品和工程的可靠性在产品的设计阶段发现潜在的问题经过分析计算,采用优化设计方案,降低原材料成本缩短产品投向市场的时间模拟试验方案,减少试验次数,从而减少试验经费ANSYS软件致力于耦合场的分析计算,能够进行结构,流体,热,电磁四种场的计算,已博得了世界上数千家用户的钟爱。
弹性力学及有限元法ANSYS实例演示

图5.1
图5.2
实例——静力学分析 位移变形图
X方向位移
Y方向位移
Z方向位移
整体位移
实例——静力学分析 受力图
X方向受力
Z方向受力
Y方向受力 整体受力
Mises应力图
实例——动力学分析
动力学分析 单元的选择
由于实体建模单元数多,计算慢,效率低,所以, 这种轴对称模型我们一般用梁单元(beam)和壳单元 (shell)来模拟。这种简化单元具有精度高,运算速度 快,效率高的优点。
ANSYS界面介绍
图2 信息输出窗口
APDL简介
ANSYS参数化设计语言(APDL)是一门可用来自动完 成有限元常规分析操作或通过参数化变量方式建立分析模 型的脚本语言,用建立职能化分析的手段为用户提供自动 完成有限元分析过程,即程序的输入可设定为根据制定的 函数、变量以及选用的分析类型来做决定,是完成优化设 计和自适应网格的最主要的基础。APDL允许复杂的数据 输入,使用户实际上对任何设计或分析属性有控制权,如 分析模型的尺寸、材料的性能、载荷、边界条件施加的位 置和网格的密度等。APDL扩展了传统有限元分析的范围, 并扩展了更高级运算包括灵敏度研究、零件库参数化建模、 设计修改和设计优化等 。
ANSYS界面介绍
(6) 图形窗口:是ANSYS的图形输出区域,一般的交互 式图形操作也在此区域进行。
(7) 状态栏:显示当前操作的有关提示。 (8) 输出窗口:如图2所示。输出窗口接受ANSYS软件运
行时所有的文本输出,比如命令的响应、注释、警告、 错误以及其他的各种信息。一般情况下,这个窗口隐 藏在主窗口后面。
下面我们先简单介绍一下Beam188单元
实例——动力学分析
Beam188单元适合于分析从细长到中等粗短的梁 结构,该单元基于铁木辛哥梁结构理论,并考虑了剪 切变形的影响。
有限元分析梁单元内力计算

迭代法
迭代法
通过迭代的方式逐步逼近梁 单元的内力。这种方法适用 于大型有限元模型,计算量 较小,但计算精度较低。
适用范围
适用于大型有限元模型,计 算量较小。
优点பைடு நூலகம்
计算量较小,适用于大型有 限元模型。
缺点
计算精度较低,不适用于对 精度要求较高的梁单元。
快速法
快速法
结合直接法和迭代法的优点,通过快速求解线性方程组来 得到梁单元的内力。这种方法适用于大型有限元模型,计 算精度较高,计算量相对较小。
有限元分析广泛应用于工程领域,如 结构力学、流体力学、电磁场等领域 ,用于解决复杂的问题和优化设计。
有限元分析的基本步骤
建立单元刚度矩阵
根据单元的物理特性和边界条 件,建立单元刚度矩阵。
施加外力
将外力施加到整体结构的节点 上。
离散化
将连续的结构或系统离散化为 有限个简单单元。
集成总刚度矩阵
将所有单元的刚度矩阵集成得 到整体结构的总刚度矩阵。
通过梁单元内力计算,可以发现潜在 的危险区域和薄弱环节,为改进设计 提供依据。
内力计算的结果还可以用于评估结构 的疲劳寿命和可靠性,为工程实际应 用提供重要的参考依据。
02
有限元分析基础
有限元分析概述
有限元分析是一种数值分析方法,通 过将复杂的结构或系统离散化为有限 个简单单元,利用数学近似方法对复 杂问题进行模拟和分析。
有限元分析梁单元内力计 算
• 引言 • 有限元分析基础 • 梁单元内力计算方法 • 梁单元内力计算的实例 • 结论
01
引言
目的和背景
有限元分析(FEA)是一种数值分析方法,用于解决复杂的工程问题,如结构强度、 刚度、稳定性等。
梁的有限元分析

定义单元类型:1)梁单元;2)弹簧单元
选择弹簧单元后,按“Option”按钮,在K3项 中选择如图所示:
定义实常数
定义材料常数(梁)
创建模型
划分网格:“Mesh”,“Set”
在“Mesh”菜单点击“line”,选择表示梁的二直线, “OK”,在弹出的菜单中的单元长度输入0.25,“OK”。
2.梁、弹簧——2D问题
有一水平梁,全长4米,左端固定,右端3米 处有一弹簧悬吊,弹簧刚度为5000N/m,右 端点受大小为3000kg的向下载荷,梁的截面 尺寸为30mmX20mm,梁的弹性模量为 2X1011 Pa,泊松比为0.3。求梁的变形。
0.5
3
1
计算性矩=B*H3/12=4.5*10-8m4 截面高H=3*10-2m 弹簧刚度K=5000N/m E=2e11Pa Pxy=0.3
梁的有限元分析
2006年10月
梁的有限元分析——2D问题
1.有一简支梁,载荷和边界条件如图所示, L=6m,梁的截面面积A=0.0072m2,高 H=0.42m,惯性矩=0.00021m4,材料弹性模 量E=2.06e11N/m2,P=10000N。求支反力 和挠度。
要点 1)实常数 2)分网密度控制 3)如何加载:左:UX,UY,右UY 4)后处理结果的观察
在“Mesh”菜单中按“Mesh”,选择表示梁的二
直线,“OK”,进行显示控制,标出各节点号。
对弹簧进行网格划分
在“Mesh”菜单点击“line”,选择表示弹簧的直线, “OK”,在弹出的菜单中的单元等分数输入“1”, (如果二等分表示两弹簧串联),“OK”。
在“Mesh”菜单中按“Mesh”,选择表示弹簧的
弹簧有限元分析ppt课件
1
2
( tt
bb )2
4
2 tb
1 2
(259 69)2 4 800.52 1612.23MPa
W-8
有限元应力计算
• 底面约束三个方向所有线位移,顶面沿纵向施加图纸规定的强迫位移72.79mm,计算所得 约束反力为:
•
FX = 0.4804281E-03
FY = 0.3961747E-03
考虑接触时72.8mm位移下的 接触压力
考虑接触时的接触压力变化
W-11
弹簧疲劳寿命分析
W-12
弹簧的动态特性研究
W-13
转K2外圆弹簧静应力测试
W-14
FZ = 32251.17
•
MX = 117118.0
ቤተ መጻሕፍቲ ባይዱMY = -20644.15
MZ = -0.8699030E-02
• 转K2外圆弹簧图纸QZC85-00-02中标注的此时的纵向载荷FZ =35594.8N。计算可得等效应 力见图5。可见,最大等效应力为1491MPa(理论计算结果为1612.23MPa)。
W-9
弹簧压缩变形的数值仿真
计算时将弹簧底面施加固定约束,顶面 设置按时间逐渐增大的位移,分析总时间设 为72.8s,计算时间分为25步,总压缩量为 72.8mm,每步压缩量为72.8/25=2.912mm。 分析中仅考虑静力影响。
W-10
接触应力的影响
• 由图6可见,支撑圈处簧条发生了嵌入,这与实际情况不符,要解决该问题必须 进行接触分析。计算时,模型离散为5223个节点,7810个单元,其中, SOLID45单元6628个,TARGE170单元238个,CONTA174单元944个。
W-2
有限元梁问题实例

•BEAM31、可承受拉、压、弯作用的单轴单元。
单元的每个节点有三个自由度,即沿x,y方向的线位移及绕Z轴的角位移。
2、二维弹性等截面对称梁,一般不考虑剪切。
23•BEAM41、是一种可用于承受拉、压、弯、扭的单轴受力单元。
这种单元在每个节点上有六个自由度:x 、y 、z 三个方向的线位移和绕x,y,z 三个轴的角位移。
2、三维弹性等截面对称梁,一般不考虑剪切。
BEAM188/189•1、可定义梁的截面形状,支持多材料横截面的定义。
•2、支持大多数非线性。
•3、包括横向剪切变形•4、BEAM188(3维2节点)/ BEAM189 (3维3节点),6-7个自由度。
第7个自由度是翘曲量。
注意:BEAM3 BEAM4 对形函数采用Hermitian多项式, 导致弯曲中的三次响应。
弯曲中BEAM188/189分别有线性和二次响应, 因此需要细化网格。
4四、ANSYS求解梁问题实例4kN/m,如图所示,材料的弹性模量210GPa,泊松比0.3,分析梁的受力和绘出内力图。
52、分析类型静力分析3、问题描述一维梁问题4、ANSYS单位m N Pa5、单元BEAM3:2节点(每个节点3个自由度)6、材料弹性模量和泊松比7、实常数面积、惯性矩、截面高度71进入ANSYS程序→ANSYSED 9.0→ANSYS Product Launcher→change the working directory into yours →input Initial jobname:beam→Run2 设置计算类型ANSYS Main Menu: Preferences →select Structural →OK3 定义材料参数ANSYS Main Menu: Preprocessor →Material Props→Material Models →Structural →Linear →Elastic→Isotropic →input EX:2.1e11, PRXY:0.3 →OK84 选择单元类型ANSYS Main Menu:Preprocessor →Element Type→Add/Edit/Delete→Add →select Beam 2D elastic3→OK (back to Element Types window) →Close (the Element Type window)95 定义实常数ANSYS Main Menu: Preprocessor →Real Constants…→Add…→select Type 1→OK→inputAREA:0.01 ;IZZ:0.0001/12;HEIGHT:0.1→OK →Close (theReal Constants Window)106生成几何模型生成关键点ANSYS Main Menu: Preprocessor →Modeling →Create →Keypoints→In Active CS→依次输入两个点的坐标:input:1(0,0),2(20,0)→OK生成梁ANSYS Main Menu: Preprocessor →Modeling →Create →Lines →lines→Straight lines →依次连接两个关键点,1(0,0), 2(20,0) →OK7、划分单元ANSYS Main Menu: Preprocessor →Meshing →Mesh Tool →(Size Controls) Global: Set →input NDIV:20→OK11Mesh: lines, →Mesh →Pick All(in Picking Menu) →Close( the MeshTool window)显示梁体ANSYS命令菜单栏:PlotCtrls>Style >Size and Style→/ESHAPE →On→OK128 模型施加约束给节点1施加x和y方向的约束ANSYS Main Menu: Solution→Define Loads →Apply→Structural →Displacement→On Nodes→节点1 →OK→select Lab2:UX和UY →OK给节点2施加y方向的约束ANSYS Main Menu: Solution→Define Loads →Apply→Structural →Displacement→On Nodes→节点2 →OK→select Lab2:UY →OK给节点12施加y方向的约束ANSYS Main Menu: ANSYS Main Menu: Solution→Define Loads →Apply→Structural →Displacement→On Nodes→节点12 →OK→select Lab2:UY →OK给梁施加均布载荷ANSYS Main Menu: Solution →Define Loads →Apply →Structural→Pressure →On Beams →Pick All →LKEY,VALI:4000→OK9 分析计算ANSYS Main Menu: Solution →Solve →Current LS→OK(to close the solve Current Load Step window) →OK13给节点1施加x和y方向的约束给梁施加载荷141511、结构的变形图ANSYS Main Menu: General Postproc→Plot Results→Deformed Shape…OK→select Def + Undeformed→1712、挠度ANSYS Main Menu: General Postproc→Plot Results→Contour Plot→NodalOKSolu→select: DOF solution, Y-Component of displacement→1813 单元表的制作ANSYS Main Menu: General Postproc→Element Table→Define Table→Add在User label for item 输入im,在Results data item 选择By sequence num并输入“smisc,6”→Apply在User label for item 输入jm,在Results data item 选择By sequence num并输入“smisc,12”→Apply在User label for item 输入is,在Results data item 选择By sequence num并输入“smisc,2”→Apply在User label for item 输入js,在Results data item 选择By sequence num并输入“smisc,8”→OK单击CLOSE关闭对话框ANSYS Main Menu: General Postproc→Element Table→List Elem Table弹出对话框→选择im→OK(列表显示出im的内容)同理可得其余表的内容。
第3讲有限元梁单元

梁单元在有限元法中的地位
有限元法是解决复杂工程问题的重要方法 之一,梁单元是有限元法中的基本元素之 一。
梁单元具有简单、易处理和计算效率高等 优点,因此在工程结构分析中广泛应用。
梁单元可以模拟各种形状和尺寸的梁,能 够提供准确的应力、应变和位移等结果, 为工程设计提供可靠依据。
梁单元在有限元法中的地位非常重要, 它是构成复杂结构的基础元素之一,对 于工程结构的分析和设计具有重要意义。
优化设计实例分析
案例一:某桥梁结构的有限元梁单元优化设计,提高了结构的稳定性和承载能力。
案例二:采用有限元梁单元优化设计方法对某高层建筑进行抗震分析,有效降低了地震对 结构的影响。
案例三:针对某机械装备的关键部件,通过有限元梁单元优化设计实现了轻量化和高性能 的设计目标。
案例四:在某航空航天器的结构设计中,有限元梁单元优化设计的应用提高了结构效率并 减轻了整体重量。
其他领域中的应用
建筑领域:用于 分析桥梁、大跨 度结构等
航空航天:用于 飞机机翼、尾翼 等部件的分析
船舶工程:用于 船体结构、桅杆 等部件的分析
汽车工业:用于 分析车架、发动 机等部件
建模的基本步骤
确定梁的长度、 截面尺寸和材
料属性
建立梁的离散 化模型,将梁 划分为若干个
小的单元
确定单元的节 点位置和节点
单击添加标题
有限元梁单元的 特性
有限元梁单元的 建模方法
有限元梁单元的 基本概念
有限元梁单元的 应用场景
有限元梁单元的 优化设计
有限元法的定义
有限元法是一种数值分析方法,用于求解偏微分方程和积分方程等数学问题
通过将连续的求解区域离散化为有限个小的单元,用代数方程代替微分方程进行求解
有限元梁单元课件

在桥梁结构的有限元分析中,梁单元被广泛用于模拟桥梁的横梁、纵梁等结构构件。通过将桥梁离散 化为一系列的梁单元,可以计算出各梁单元的应力、应变等力学参数,从而评估桥梁的整体性能和安 全性。
建筑结构的有限元分析
总结词
建筑结构的有限元分析是有限元梁单元的又一重要应用,通 过模拟建筑的受力行为,可以优化建筑设计并提高建筑的安 全性和稳定性。
拓展有限元梁单元的应用范围 ,将其应用于更广泛的工程领 域,如海洋工程、地质工程等 。
结合智能优化算法和机器学习 技术,实现有限元梁单元的自 动建模和参数优化,提高设计 效率。
加强与实验研究的结合,通过 实验验证有限元梁单元的准确 性和可靠性,为工程实际提供 更加可靠的依据。
THANKS
01
梁单元是一种常见的有限元单元,用于模拟具有弯曲和剪切行 为的杆件。
02
在有限元梁单元的离散化过程中,将梁划分为一系列小的单元
,每个单元具有节点和内部点。
离散化后的梁可以被表示为一组节点的位移和内力的函数,通
03
过节点间的位移关系和内力平衡关系建立方程。
有限元梁单元的刚度矩阵与质量矩阵
刚度矩阵和质量矩阵是有限元分析中的两个重要概念 ,分别描述了结构的刚度和质量特性。
03 有限元梁单元的实现
有限元方法概述
有限元方法是一种数值分析方法,通过将复杂的连续结构离散化为有限个 小的单元,来近似求解复杂的工程问题。
有限元方法具有灵活性和通用性,可以应用于各种形状和类型的结构分析 。
有限元方法的基本步骤包括离散化、单元分析、整体分析、求解和后处理 等。
有限元梁单元的离散化
研究梁在稳定性问题下的承载能力和 失稳过程。
梁的剪切理论
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
有限元方法对工程问题的研究具有重要帮助,本文介绍了有限元方法及其基本原理以及优势,对其解决问题的一般步骤进行了总结分析。
并具体用 MATLAB 对弹簧单元和梁单元实例进一步分析计算,得出了弹簧单元各个节点位移、支反力以及单元内力;计算了梁单元所受位移、转角、力和力矩大小并绘制其剪力图和转矩图。
有限元方法;弹簧单元;梁单元;matlab1有限单元法最初作为结构力学位移法的拓展,它的基本思路是将复杂的结构或物体看成由有限数目的单元体彼此仅在结点处相联系而构成的集合体。
首先,对每一个单元分析其特性,建立相关物理量之间的相互联系;然后,依据单元之间在结点处的联系,再将各单元组装成整体,从而获得整体特性方程;最后,应用与所得方程相应的解法,即可完成整个问题的分析。
这种先“化整为零”,然后再“集零为整"和“化未知为已知”的研究方法,是有普遍意义的,是科学研究的基本方法之- -。
有限单元法作为一种近似的(除杆件体系结构静力分析外)数值分析方法,它借助于矩阵等数学工具,尽管计算工作量很大,但是分析流程是- -致的,有很强的规律性和统--的模式,因此特别适合于编制计算机程序来处理。
-一般来说,一定前提条件下分析的近似性,随着离散化单元网格的不断细化,计算精度将随之提高。
随着计算机软硬件技术的飞速发展,有限单元分析技术得到了越来越多的应用,五十多年来的发展几乎涉及了各类科学、工程领域中的问题。
从应用的深度和广度来看,有限单元法的研究和应用正继续不断地向前探索和推进。
2基础工程学科中的各种力学问题,最终归结为求解数学物理方程边值或初值问题。
而传统的研究成果只能对较简单、规则的问题进行解析求解,大量的实际科学、工程计算问题,由于数学上的困难无法得到解析的解答。
从有限单元法正式提出至今已经历了半个多世纪的发展,用有限单元法来解决问题,从理论上讲,无论是简单的十维杆件体系结构,还是承受复杂荷载和不规则边界情况的二维平面轴对称问题、三维空间块体等问题的静力、动力和稳定性分析,考虑材料具有非线性力学行为和有限变形的分析,温度场、电磁场,流体、液-固、结构与土壤相互作用等工程复杂问题的分析,都可以得到满意的解决。
作为教材,本书将只介绍应用最广泛的、以结点位移作为基本未知量的“位移型有限元”,简称“位移元”,讨论范围仅限于最基本的线弹性问题。
虽然有限单元法能解答各种各样的复杂工程问题,但其求解的思路和过程是基本相同的,大致分为以下4个步骤:(1)结构离散化及数据化。
用--些假想的线或面对连续的结构进行分割,使其成为由结点连接起来的有限数量的单元体(注意单元体和材料力学中的微元体是根本不同的,它的尺度是有限值而不是微量)集合体,用这个单元集合体代替原来要分析的物体。
再通过某种编码格式,将单元集合体的所有相关信息编码成为数据,以供计算机分析。
(2) 单元分析。
这一步工作将对结构中的任- -典型单元进行分析。
以平面静力问题为例,单元分析的目的是将单元内任一点的位移、应变、应力都表示为单元结点位移的函数,并最终建立结点力与结点位移之间的关系方程,即单元刚度方程。
(3)整体分析。
有了单元特性分析的结果,像结构力学中解超静定结构的位移法一样,可以建立起表示整个结构(实质上,更确切地说是单元集合体)结点平衡的方程组,即整体刚度方程。
本步骤计算的细节取决于所求解的问题和所编制计算机程序的处理方法,对于一些问题将存在坐标(局部与整体)转换问题、位移边界条件的引人等。
(4)解方程组和输出计算结果。
对线弹性问题,整体刚度方程一.般是- -组高阶的线性代数方程组。
由于整体刚度矩阵具有带状、稀疏和对称等特性,在有限单元法发展过程中,人们通过研究,建立了许多不同的存储方式和计算方法,目的是节省计算机的存储空间和提高计算效率。
利用相应的计算方法即可求出全部未知的结点位移。
求出结构全部结点位移后,利用分析过程中已建立的一-些关系,即可进--步计算单元中的应力或内力,并以数表或图形的方式输出计算结果。
2.31.可以很容易地模拟不规则形状的结构。
2.可以毫无困难地处理一般的荷载条件。
3.因为单元方程是单个地建立的,因此可以模拟由几种不同材料构成的物体。
4.可以处理数量不受限制的和各种类型的边界条件。
5.单元的尺寸大小可以变化,必要时可使用小单元。
6.改变有限元模型比较容易,花费不大。
3该步骤包括将域分解成单元和节点。
对于像桁架和刚架这类离散系统,已经离散化,这一步就不需要了。
此处获得的结果应该已经是精确的。
然而,对于连续系统,如板壳,这一步就变得至关重要,因为它只能得到近似的结果。
因此解决方案的精确度取决于所使用的离散化方法。
离散化之后,应当选择最适当的单元类型来最接近地模拟实际的物理性能。
所用的单元总数和给定物体内单元大小和类型的变化是需要工程判断的主要问题。
单元必须小到可以给出有用的结果, 又必须足够大以节省计算费用。
选择每个单元内的位移函数。
该函数是用单元的节点值在单元内部定义的。
线性、二次和三次多项式是常常使用的位移函数,因为用它们建立有限元公式比较简单。
每个单元可重复使用同一个通用的位移函数。
因此有限元方法是这样一种方法:一个连续量,如整个物体内的位移,用一个离散的模型来近似,而此离散模型是由每个有限域或有限单元内定义的分片连续函数组成的。
为了推导被划分的有限个单元的方程,那么需要应变位移和应力应变关系,常用的方式有胡克定律。
单元刚度矩阵和单元方程的建立是根据刚度影响系数的概念,需要有结构分析的背景知识,常用的方法有之间平衡法、功和能量法以及加权残余法。
可以使用叠加法(称为直接刚度法,其理论基础为节点力平衡)将第 3.4 得出的单个单元方程加在一起得出整个结构的总体方程。
在直接刚度法中所隐含的是连续和协调概念,要求结构保持完整,在结构任何一处不发生撕开。
3.6方程在修改考虑了边界条件之后,形成一组联立代数方程组,可以写为扩展的矩阵阶数是未知自由度的结果总数;可用消元或迭代求解该方程。
3.73.844.1求出如图 1 所示,各个节点的位移,单元内力和支反力。
(弹簧弹性系数和节点受力均已在图中标识)图 1 弹簧单元实例图4.1.14.1.2>> k1=SpringElementStiffness(2500) >> k2=SpringElementStiffness(2500) >> k3=SpringElementStiffness(5000)4.1.3>> K=zeros(4,4)定义4×4 的空白矩阵。
>> K=SpringAssemble(K,k1,1,3)>> K=SpringAssemble(K,k2,2,3)>> K=SpringAssemble(K,k3,3,4)经过整合,得到总体刚度矩阵如下:2500 0 -2500 00 2500 -2500 0-2500 -2500 10000 -50000 0 -5000 5000 4.1.4对节点 1、2、4 的位移进行分析,U1 = 0,U2= 0,U4= 0 。
节点 3 所受合外力 F=10KN。
4.1.5>> k=K(3,3)>> f= [2]>> u=k\f>> U= [0;0;u(3) ;0]U=5.0E-03*5.0000如上矩阵所示,四个节点的位移均已用矩阵形式表示出来了 (向右为正) ,接着通过通过计算求出受力大小。
>> F=K*UF=-2.500-2.50010.000-5.000如上矩阵所示,四个节点的受力均已用矩阵形式表示出来了 (向右为正) ,接着通过通过计算求解各个单元内力。
4.1.6>> u1= [0;U(3)]>> u2= [0;U(3)]>> u3= [U(3) ;U(4)]>> f1=SpringElementForces(k1,u1)>> f2=SpringElementForces(k2,u2)>> f3=SpringElementForces(k3,u3)F1=-2.5002.500F2=-2.5002.500F3=5-5经由 MATLAB,解出各结果如下:以上即为利用MATLAB 与有限元法来对解弹簧单元的力学分析。
当然,有限元法不是只能用来分析弹簧单元,下面就让我们来看看,如何利用有限元法和 MATLAB 软件来求解弹簧元与平面桁架组成的结构。
如图 2 所示梁单元结构,假定弹性模量 E=200GPa 、惯性矩 I=70 × 10-5m4 、M=15kN m求:(1) 系统的总体刚度矩阵;(2) 各节点的位移、转角;(3) 各节点的支反力;(5) 每个单元的内力 (剪力、弯矩) ;(6) 每个单元的剪力图;(7) 每个单元的弯矩图。
图 2 梁单元实例图4.2.14.2.2>> E=200e6>> I=70e-5>> L1=3.5>> L2=2>> k1=BeamElementStiffness(E,I,L1)>> k2=BeamElementStiffness(E,I,L2)4.2.3建立6×6 矩阵:>> K=zeros(6,6)>> K=BeamAssemble(K,k 1, 1,2)>> K=BeamAssemble(K,k2,2,3)4.2.4位移、U1=0、U2=0、U3=0;弯矩:M1=0 、M2= 15 、M3=0。
4.2.5>> k=K([2,4,6], [2,4,6])>> f= [0;15;0]>> u=k\f>> U= [0;u(1) ;0;u(2) ;0;u(3)] >> F=K*U利用MATLAB 所得结果如下:U=1.0e-04*-0.4752-0.9504-0.4752F=3.1276-0.00006.255232.0000-7.42580.00004.2.6>> u1= [U(1) ;U(2) ;U(3) ;U(4)] >> u2= [U(3) ;U(4) ;U(5) ;U(6)] >> f1=BeamElementForces(k1,u1)>> f2=BeamElementForces(k2,u2)所得计算结果如下:U1=1.0e-04-0.47520.9504U2=1.0E-04*0.9504-0.4752>>BeamElementShearDiagram(f1, L)>>BeamElementShearDiagram(f2, L)>>BeamElementMomentDiagram(f1, L)>>BeamElementMomentDiagram(f2, L)用上述程序运行得出各单元的剪力图和弯矩图5在特殊条件下,通过十几周的学习,我已经对有限元的基础有了一个大致掌握,关于用有限元进行具体分析也掌握了一些最基本的方法。