单片机-汽车转向灯
单片机课程设计汽车转向灯
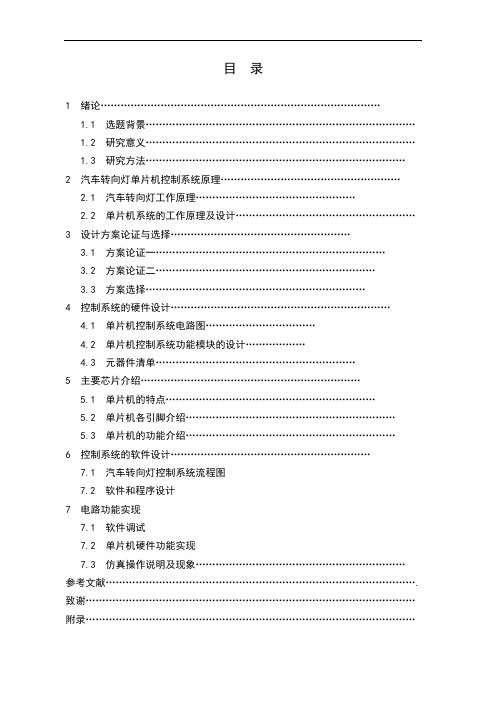
2010 届毕业设计(论文)课题任务书系:电气与信息工程系专业:电子信息工程技术目录1 绪论…………………………………………………………………………1.1 选题背景………………………………………………………………………1.2 研究意义………………………………………………………………………1.3 研究方法……………………………………………………………………2 汽车转弯灯单片机控制系统原理………………………………………………2.1 汽车转弯灯工作原理…………………………………………2.2 单片机系统的工作原理及设计………………………………………………3 设计方案论证与选择………………………………………………3.1 方案论证一……………………………………………………………3.2 方案论证二…………………………………………………………3.3 方案选择…………………………………………………………4 控制系统的硬件设计…………………………………………………………4.1 单片机控制系统电路图……………………………4.2 单片机控制系统功能模块的设计………………4.3 元器件清单……………………………………………………5 主要芯片介绍…………………………………………………………5.1 单片机的特点………………………………………………………5.2 单片机各引脚介绍………………………………………………………5.3 单片机的功能介绍………………………………………………………6 控制系统的软件设计……………………………………………………7.1 汽车转弯灯控制系统流程图7.2 软件和程序设计7 电路功能实现7.1 软件调试7.2 单片机硬件功能实现7.3 仿真操作说明及现象………………………………………………………参考文献…………………………………………………………………………………. 致………………………………………………………………………………………附录………………………………………………………………………………………摘要随着单片机的日益发展,其应用也越来越广泛,通过对“汽车转弯灯单片机控制系统”设计,可以对单片机的知识得到巩固和扩。
单片机课程设计汽车转向灯

转向灯系统与单片机的接口设计
单片机对转向灯系统的控制 方式
转向灯系统的信号输入输出 接口
单片机与转向灯系统的连接 方式
单片机与转向灯系统的通信 协议
单片机程序编写与调试
单击此处添加副标题
单片机课程设计汽车转向
灯
汇报人:
目录
01 02 03 04 05 06
添加目录项标题 单片机基础知识 汽车转向灯系统设计 单片机与转向灯系统的结合 汽车转向灯系统测试与优化
总结与展望
01
添加目录项标题
02
单片机基础知识
单片机的基本概念
单片机是一种集成电路芯片, 将微处理器、存储器、输入/输 出接口等集成在一起
系统性能优化与改进
优化转向灯亮度:提高亮度,增强可视性 优化转向灯响应速度:提高响应速度,提高安全性 优化转向灯寿命:延长使用寿命,降低维护成本 优化转向灯能耗:降低能耗,提高环保性能
实际应用中的注意事项
确保转向灯系统正常工作,避免 故障影响驾驶安全
在恶劣天气条件下,注意转向灯 系统的使用情况
编写单片机程序:根据转向灯系统的需求,编写相应的程序代码
调试程序:通过仿真软件或硬件设备,对编写的程序进行调试,确 保其正确运行
优化程序:根据调试结果,对程序进行优化,提高其运行效率和稳定 性
测试程序:在实际的汽车转向灯系统中进行测试,确保其能够满足 需求
05
汽车转向灯系统测试与优化
系统测试方法与步骤
单片机在汽车电子领域的应用前景
智能驾驶:单片机在自动驾驶系统中的应用 车载娱乐系统:单片机在车载娱乐系统中的应用 安全系统:单片机在汽车安全系统中的应用 节能环保:单片机在汽车节能环保技术中的应用
单片机汽车转向灯
单片机原理与应用课程大作业项目名称:基于AT89S52的汽车灯光控制系统设计专业班级:微机091 学号:姓名:连云港职业技术学院信息工程学院2011年4月19 日目录第一章项目要求---------------------------------1.1 设计目标----------------------------------1.2 AT89S52的简介和结构框图-------------------第二章项目设计前的分析-------------------------2.1 汽车转向灯的几种状态分析------------------2.2 设计电路的思路----------------------------第三章硬件电路的设计----------------------------3.1 单片机简介--------------------------------3.2 8051单片机指令----------------------------3.3 MCS-51构成与工作原理----------------------第四章软件的设计--------------------------------4.1 发光二极管常亮-----------------------------4.2 发光二极管一闪一亮-------------------------4.3 发光二极管一闪一亮(可延时)---------------4.4 通过开关控制发光二极管一闪一亮(可延时)---4.5 通过开关控制发光二极管一闪一亮(可延时),当出现故障时能报警------------------------------------------- 第五章项目设计总结------------------------------第六章元件清单----------------------------------第一章项目要求一、设计目标1、发光二极管常亮2、发光二极管一闪一亮3、发光二极管一闪一亮(可延时)4、通过开关控制发光二极管一闪一亮(可延时)5、通过开关控制发光二极管一闪一亮(可延时),当出现故障时能报警二、 AT89S52的简介和结构框图第二章项目设计前的分析一、汽车转向灯的几种状态分析汽车灯主要包括转向灯、刹车灯、倒车灯、雾灯。
单片机课程设计:汽车转向灯控制系统
单片机原理及系统课程设计专业:自动控制班级:控093姓名:古月学号:2009020202指导教师:交通大学自动化与电气工程学院2012 年7月1日基于单片机的汽车转向灯控制系统1 引言车灯是行车安全的必备件,除了具有照明作用,对行人和其他车辆还具有转向、刹车等警示作用。
汽车转向和故障信号灯是汽车运动方向和车身状态的表示信号,关系着汽车的安全问题,因此基于单片机的汽车转向灯控制器一直以来都是汽车电子设计中的一个十分重要的领域。
本设计是设计一个单片机控制系统,在汽车进行左转弯、右转弯、刹车、合紧急开关、停靠、倒车等操作时,实现对各种信号指示灯的控制。
它主要是对单片机的并行输入/输出口电路的应用,通过I/O口控制发光二极管的亮﹑灭﹑闪烁,加上一些串口电路﹑按键电路﹑驱动电路来模拟汽车尾灯的功能并在PC机上显示此时的汽车行进状态。
汽车转弯或停靠时,相应的信号灯要发出闪烁的灯光信号,目前国广泛使用电热式闪光器产生闪光信号。
闪烁频率在50~110 次/分,但是一般控制在60~95 次/分之间。
闪光器是通过调节镍铬丝的拉力和触点的间隙来满足频率要求的,灯泡功率的大小也会影响闪烁频率,因此在更换闪光器或灯泡时调整比较困难。
同时,系统没有故检测,驾驶员无法知道车外的转向灯及故障指示灯是否点亮,从而影响行车安全。
到目前为止,我们还没有发现能检测灯丝断这种故障的有效方法。
针对上述问题,我们用AT89C51单片机设计了一套汽车转向灯控制系统。
用LED产生闪光信号,同时能自动检测信号灯故障。
2 设计方案及原理汽车转弯灯单片机控制系统电路是由单片机AT89C51、复位、时钟、LED显示电路、按键电路构成等几部分组成。
2.1 系统设计本设计要求在汽车进行左转弯、右转弯、刹车、合紧急开关、停靠、倒车等操作时,实现对各种信号指示灯的控制。
根据设计要求,制定总体的设计思想:以单片机AT89C51为核心芯片通过控制LED的显示来模拟汽车转向灯,即用开关K1-K6的闭合分别模拟刹车、紧急、停靠、左转、右转、倒车操作;用LED发光二极管D1-D8的亮灭显示来模拟汽车的故障指示灯、左头灯、右头灯、左转弯信号灯、右转弯信号灯、左尾灯、右尾灯、倒车灯的显示情况。
单片机课程设计_单片机汽车转向信号灯设计
单片机课程设计题目:汽车转向信号灯设计班级:姓名:学号:指导教师:设计时间:目录1.引言 (3)2.设计方案及原理 (4)2.1设计方案 (4)2.2设计原理: (5)2.2.1 开关状态检测 (6)2.2.2 输出控制 (6)2.2.3 定时器和计数器 (6)2.2.4 定时初始化 (8)2.2.5 汽车转向灯显示 (9)2.2.6 汽车转向灯控制 (9)2.2.7 中断系统 (10)3.硬件设计 (10)3.1 单片机控制系统电路图 (10)3.1.1汽车转向灯单片机控制系统框图 (10)3.1.2汽车转向灯单片机控制系统电路图 (12)3.2 汽车转向灯控制系统流程图 (12)3.2.1 汽车转向灯控制系统主程序流程图 (12)3.2.2 中断服务程序流程图 (13)3.2.3控制系统键功能流程图 (14)4.软件设计 (14)4.1 程序流程图 (15)4.2 源程序 (18)5.总结 (20)6.参考文献 (22)1.引言随着单片机的日益发展,其应用也越来越广泛,通过对“汽车转向灯单片机控制系统”设计,可以对单片机的知识得到巩固和扩展。
本课程内容是设计一个单片机控制系统,在汽车进行左转弯、右转弯、刹车、合紧急开关、停靠等操作时,实现对各种信号指示灯的控制。
本设计主要是对单片机的并行输入/输出口电路的应用,通过I/O口控制发光二极管的亮﹑灭﹑闪烁,加上一些复位电路﹑按键电路﹑驱动电路来模拟汽车尾灯的功能。
汽车在驾驶时有左转弯、右转弯、刹车、合紧急开关、停靠等操作。
在左转弯或右转弯时,通过转弯操作杆应使左转开关或右转开关合上,从而使左头灯、仪表板左转弯灯、左尾灯或右头灯、仪表板右转弯灯、右尾灯闪烁;合紧急开关时要求前面所述的6个信号灯全部闪烁;汽车刹车时,两个尾灯点亮;如正当转弯时刹车,则转弯时原应闪烁的信号灯仍应闪烁。
以上闪烁,都是频率为1Hz 的低频闪烁;在汽车停靠而停靠开关合上时,左头灯、右头灯、左尾灯、右尾灯按频率为10Hz的高频闪烁。
单片机实验---汽车转向灯控制
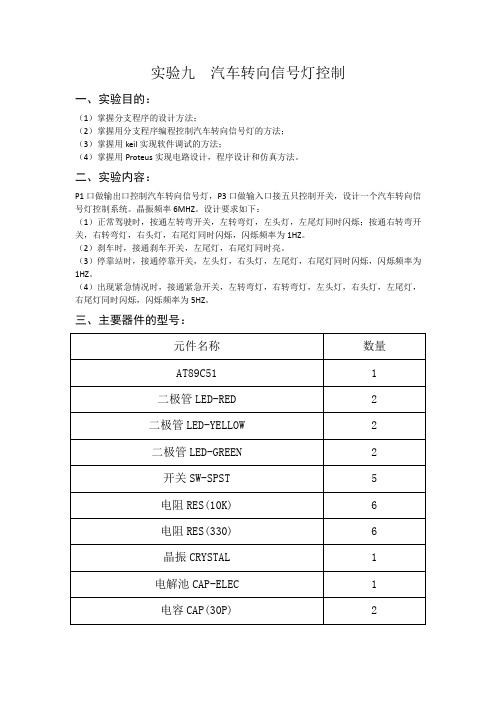
实验九汽车转向信号灯控制一、实验目的:(1)掌握分支程序的设计方法;(2)掌握用分支程序编程控制汽车转向信号灯的方法;(3)掌握用keil实现软件调试的方法;(4)掌握用Proteus实现电路设计,程序设计和仿真方法。
二、实验内容:P1口做输出口控制汽车转向信号灯,P3口做输入口接五只控制开关,设计一个汽车转向信号灯控制系统。
晶振频率6MHZ。
设计要求如下:(1)正常驾驶时,按通左转弯开关,左转弯灯,左头灯,左尾灯同时闪烁;按通右转弯开关,右转弯灯,右头灯,右尾灯同时闪烁,闪烁频率为1HZ。
(2)刹车时,接通刹车开关,左尾灯,右尾灯同时亮。
(3)停靠站时,接通停靠开关,左头灯,右头灯,左尾灯,右尾灯同时闪烁,闪烁频率为1HZ。
(4)出现紧急情况时,接通紧急开关,左转弯灯,右转弯灯,左头灯,右头灯,左尾灯,右尾灯同时闪烁,闪烁频率为5HZ。
三、主要器件的型号:四、实验参考电路:实验时用发光二极管替代信号灯,P1.7------P1.2接发光二极管的阴极,P1口的管脚输出低电平时对应的发光二极管点亮。
控制开关的信号通过P3.4-------P3.0送入单片机,设控制开关输出低电平有效。
汽车转向信号控制灯控制电路如下图所示:五、实验参考程序:ORG 0000HLJMP MAINORG 0030HMAIN: MOV P3,#0FFHMOV A,P3 // 读P3口输入数据JNB ACC.4,JJ // ACC.4=0,转移到紧急状态JNB ACC.3,TK // ACC.3=0,转移到停靠状态JNB ACC.2,SC // ACC.2=0,转移到刹车状态JNB ACC.1,YZW // ACC.1=0,转移到右转弯状态JNB ACC.0,ZZW // ACC.0=0,转移到左转弯状态SJMP MAINJJ: MOV P1,#03H // 紧急状态LCALL DELAY1 // 0.1秒延时MOV P1,#0FFH // 信号灯全灭LCALL DELAY1SJMP MAINTK: MOV P1,#0C3H // 停靠状态LCALL DELAY2 // 0.5秒延时MOV P1,#0FFH // 信号灯全灭LCALL DELAY2SJMP MAINSC: MOV P1,#0F3H // 刹车状态LCALL DELAY2 // 0.5秒延时MOV P1,#0FFH // 信号灯全灭SJMP MAINYZW: MOV P1,#0ABH // 右转弯状态LCALL DELAY2 // 0.5秒延时MOV P1,#0FFH // 信号灯全灭LCALL DELAY2SJMP MAINZZW: MOV P1,#57H // 左转弯状态LCALL DELAY2 // 0.5秒延时MOV P1,#0FFH // 信号灯全灭LCALL DELAY2SJMP MAINORG 0100H // 0.1秒延时子程序DELAY1: MOV R3,#100 // 0.1秒循环次数DEL1: MOV R2,#248 // 1ms循环次数NOPDEL2: DJNZ R2,DEL2DJNZ R3,DEL1RET // 子程序返回ORG 0200H // 0.5秒延时子程序DELAY2: MOV R4,#5 // 0.5秒循环次数DEL3: MOV R3,#100 // 100ms循环次数DEL4: MOV R2,#248 // 1ms循环次数NOPDEL5: DJNZ R2,DEL5DJNZ R3,DEL4DJNZ R4,DEL3RET // 子程序返回END六、实验步骤:(1)用Keil软件对源程序进行调试如下:如图可以看到调试程序无错误,切将其生成HEX文件;(2)根据汽车转向信号灯控制实验电路及相应器件连接电路图如下:(3)将所生成的HEX文件下载到芯片中,根据实验内容对其进行运行;A、当正常驾驶时,按通左转弯开关,左转弯灯,左头灯,左尾灯同时闪烁;按通右转弯开关,右转弯灯,右头灯,右尾灯同时闪烁,闪烁频率为1HZ,如下图所示:B、当刹车时,接通刹车开关,左尾灯,右尾灯同时亮,如下图:C、当停靠站时,接通停靠开关,左头灯,右头灯,左尾灯,右尾灯同时闪烁,闪烁频率为1HZ,如下图:D、出现紧急情况时,接通紧急开关,左转弯灯,右转弯灯,左头灯,右头灯,左尾灯,右尾灯同时闪烁,闪烁频率为5HZ,如下图:七、实验总结:(1)通过软件与硬件的配合使用,更加深刻的理解软件与硬件之间的关系;(2)通过汽车转向信号灯的控制实验的设计与实现,对汽车转向灯控制原理与实际应用有更深刻的了解;(3)通过自己动手,理论与实践相结合,扩展自己的知识视野。
单片机转向灯实训报告
一、实训背景随着汽车工业的快速发展,汽车转向灯在行车安全中扮演着重要角色。
传统的转向灯控制系统多为机械式,存在故障率高、维修不便等问题。
近年来,单片机技术在汽车电子领域的应用越来越广泛,利用单片机实现转向灯的精确控制,不仅能提高行车安全,还能降低维修成本。
本实训旨在通过学习单片机原理和应用,设计并实现一款基于单片机的转向灯控制系统。
二、实训目的1. 掌握单片机的基本原理和应用;2. 学会使用单片机开发工具和编程语言;3. 熟悉转向灯控制系统的工作原理;4. 培养实际动手能力和团队协作精神。
三、实训内容1. 单片机基础知识单片机是一种集成了CPU、存储器、输入/输出接口等功能的微型计算机。
本实训选用8051系列单片机作为核心控制单元。
通过学习8051单片机的内部结构、工作原理、指令系统、编程方法等知识,为转向灯控制系统的设计打下基础。
2. 转向灯控制系统设计(1)系统组成转向灯控制系统主要由单片机控制模块、转向灯驱动模块、信号输入模块、故障检测模块和电源模块组成。
(2)工作原理单片机控制模块接收驾驶员的转向信号,根据信号类型控制转向灯的闪烁频率和亮度。
转向灯驱动模块根据单片机的控制指令,驱动左右转向灯闪烁。
信号输入模块将驾驶员的转向信号转换为单片机可识别的电平信号。
故障检测模块实时监测转向灯的工作状态,一旦发现故障,立即向单片机发送报警信号。
电源模块为系统提供稳定的工作电压。
(3)电路设计根据系统需求,设计合适的电路,包括单片机最小系统、转向灯驱动电路、信号输入电路、故障检测电路和电源电路。
3. 软件设计(1)编程环境使用Keil uVision 5作为编程环境,编写8051单片机程序。
(2)程序设计编写程序实现以下功能:1)接收驾驶员的转向信号,控制转向灯的闪烁频率和亮度;2)检测转向灯的工作状态,一旦发现故障,立即报警;3)实时显示系统运行状态。
四、实训过程1. 熟悉8051单片机原理和编程方法;2. 设计转向灯控制系统电路;3. 编写程序实现转向灯控制功能;4. 测试和调试程序,确保系统稳定运行。
单片机汽车转向灯开题报告
单片机汽车转向灯开题报告引言汽车转向灯是一种非常重要的安全设备,其功能是通过闪烁来提醒其他车辆和行人驾驶员将要转向的方向。
由于其重要性,我们决定使用单片机来设计和实现一种可靠的汽车转向灯系统。
本报告将介绍我们的项目目标、实施计划和预期结果。
项目目标本项目的目标是设计和实现一种基于单片机的汽车转向灯系统。
主要目标包括:1.实现转向指示功能:通过控制转向灯的闪烁来指示车辆即将转向的方向。
2.提高灵活性:允许驾驶员选择转向灯的闪烁频率和模式。
3.实现自动关闭功能:在车辆完成转弯后,转向灯应自动关闭。
4.提高可靠性:设计一个稳定可靠的电路,以确保转向灯系统始终正常工作。
实施计划以下是我们的实施计划:1.硬件准备:选择合适的单片机和其他所需的电子元件,并搭建一个实验电路。
2.学习单片机编程:熟悉单片机的编程语言和开发环境,并学习如何控制输入输出。
3.设计转向灯控制逻辑:根据转向信号和驾驶员输入设计转向灯的控制逻辑。
4.实现基本功能:使用单片机编程实现转向灯的基本功能,包括转向指示、闪烁频率控制和自动关闭。
5.测试和优化:使用实验电路对系统进行测试,并根据测试结果进行优化和改进。
6.编写文档:整理项目过程和结果,撰写项目报告。
预期结果我们预计实现一个功能强大且可靠的单片机汽车转向灯系统。
预期结果包括:1.转向灯指示功能:转向灯能够根据驾驶员输入和转向信号正确地指示车辆即将转向的方向。
2.灵活性:驾驶员可以通过控制面板选择转向灯的闪烁频率和模式。
3.自动关闭功能:转向灯能够在车辆完成转弯后自动关闭,以避免误导其他车辆和行人。
4.可靠性:经过测试和优化后,转向灯系统应该是稳定和可靠的,能够长时间正常工作。
结论本报告介绍了我们的单片机汽车转向灯项目的开题报告。
项目的目标是设计和实现一种可靠和灵活的转向灯系统,并已制定了实施计划和预期结果。
我们相信该项目能够为车辆驾驶员提供更好的转向指示功能,提高交通安全性。
我们将努力完成该项目,并期待得到一个成功的结果。
单片机课程设计:汽车转向灯
3 设计方案论证与选择……………………………………………… 3.1 方案论证一…………………………………………………………… 3.2 方案论证二………………………………………………………… 3.3 方案选择…………………………………………………………
probl ems that ca nnot be ignored. Some leaders unwilli ng to do masses w ork, masse s concept weak, on mas ses feeling s not dee p, pe ndulum not are with mas ses of relations hip, t hink mass es work i s revoluti onary war era of things, now obsolete has, burie d busine ss work , ignore d masse s work of s ituation compare d Ge neral; s ome leaders not do mas ses w ork, ol d method regardle ss of with, new not with, not understand masses psychol ogical, not understand masses w ishe s, not said mas ses la nguage, w ork method sim ple stiff, cause d masses of conflict and antipat hy; s ome leaders can't do masses work , Faced wit h a lot of contradi ctions among the people worry a bout fear, pa nic set i n encounter group eve nts, and s ome are even misma naged, i nflame, so w ork has suffered heavy l osse s, and s o on. The se problems we ar e soberly aware, e nha nci ng the party's ruli ng capa bilit y, the maintenance and devel opme nt of the party's a dvanced nature and pur ity, a nd to e nhance the a bility of party committees and lea ding cadre s are
汽车转向灯单片机c语言程序及其原理图
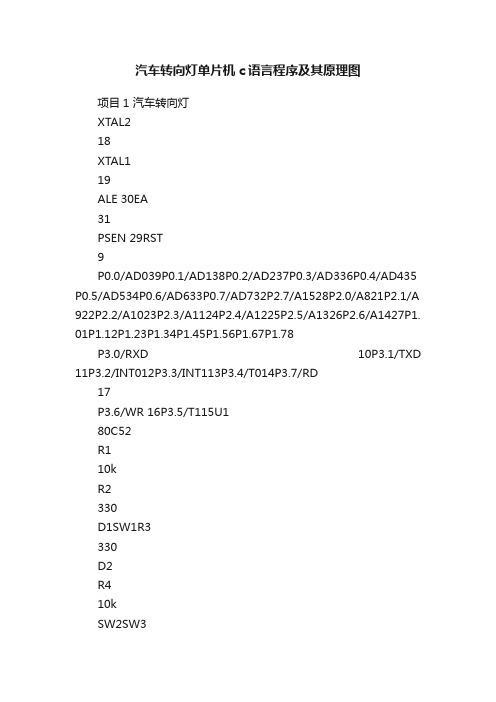
汽车转向灯单片机c语言程序及其原理图项目1 汽车转向灯XTAL218XTAL119ALE 30EA31PSEN 29RST9P0.0/AD039P0.1/AD138P0.2/AD237P0.3/AD336P0.4/AD435 P0.5/AD534P0.6/AD633P0.7/AD732P2.7/A1528P2.0/A821P2.1/A 922P2.2/A1023P2.3/A1124P2.4/A1225P2.5/A1326P2.6/A1427P1. 01P1.12P1.23P1.34P1.45P1.56P1.67P1.78P3.0/RXD 10P3.1/TXD 11P3.2/INT012P3.3/INT113P3.4/T014P3.7/RD17P3.6/WR 16P3.5/T115U180C52R110kR2330D1SW1R3330D2R410kSW2SW3附:C 程序源代码#includesbit sw1=P1^0; //定义P1.0引脚位名称为P1_0 sbit sw2=P1^1; sbit sw3=P1^2;sbit ledl=P0^0; //定义P0.0引脚位名称为P0_0 sbit ledr=P0^1;void delay(unsigned char k) {unsigned char i,j; for(i=0;i<k;i++)< p="">for(j=0;j<200;j++); }void main() //主函数 {P1=0xff; while(1) {if(sw1==0) ledl=0; if(sw2==0) ledr=0; if(sw3==0){ledl=0;ledr=0;}delay(200);ledl=1;ledr=1;delay(200);}}#include#include#define uchar unsigned char#define uint unsigned intuchar code DSY_CODE[]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90,0x88,0x83,0xC6,0xA1,0x86,0x8E,0xbf};uchar code df_table[]={0,1,1,2,3,3,4,4,5,6,6,7,8,8,9,9};uchar currentT=0;uchar HOUR,MIN,SECOND,count_t0,count_t1;uchar temp_value[]={0x00,0x00};uchar display_digit[]={0,0,0,0};uchar time_or_temperature;sbit DQ=P3^3;sbit SPK=P3^4;bit flag;bit ds18b20_is_ok=1;bit key_flag=0;void delay(uint x){while(--x);}void delay1ms(uint m){uchar i;while(m--) for(i=0;i<120;i++);}uchar init_ds18b20()uchar status;DQ=1;delay(8);DQ=0;delay(90);DQ=1;delay(8); status=DQ;delay(100);DQ=1;return status;}uchar readonebyte(){uchar i,dat=0;DQ=1;_nop_();for(i=0;i<8;i++)DQ=0;dat>>=1;DQ=1;_nop_();_nop_();if(DQ) dat|=0x80;delay(30);DQ=1;}return dat;}void writeonebyte(uchar dat){uchar i;for(i=0;i<8;i++){DQ=0;DQ=dat&0x01;delay(5);DQ=1;dat>>=1; } delay(8);}void read_temperature(){if(init_ds18b20()==1)ds18b20_is_ok=0;else{writeonebyte(0xcc);writeonebyte(0x44);init_ds18b20();writeonebyte(0xcc);writeonebyte(0xbe);temp_value[0]=readonebyte();temp_value[1]=readonebyte();ds18b20_is_ok=1;void display_temperature(){uchar i,j;//延时值与负数标识uchar t=150,ng=0;//高5位全为1(0xf8)则为负数,为负数时取反加1,并设置负数标识 if((temp_value[1]&0xf8)==0xf8){temp_value[1]=~temp_value[1];temp_value[0]=~temp_value[0]+1;if(temp_value[0]==0x00) temp_value[1]++;//负数标识置1ng=1;}//查表得到温度小数部分display_digit[0]=df_table[temp_value[0]&0x0f];//获取温度整数部分(高字节中的低3位与低字节中的高4位,无符号)currentT=((temp_value[0]&0xf0>>4))|((temp_value[1]&0x07)<< 4); //将整数部分分解为3位待显示数字display_digit[3]=currentT/100;display_digit[2]=currentT%100/10;display_digit[1]=currentT%10;if(ng==1){P2=0x01;P0=0xbf;delay1ms(11);P2=0x02;P0=DSY_CODE[display_digit[2]];delay1ms(11);P2=0x04;P0=DSY_CODE[display_digit[1]]&0x7f;delay1ms(11);P2=0x08;P0=DSY_CODE[display_digit[0]];delay1ms(11);}else{j=0x01;for(i=0;i<4;i++){P2=j;if(i==2) P0=DSY_CODE[display_digit[3-i]]&0x7f; else P0=DSY_CODE[display_digit[3-i]];delay1ms(11);j=_crol_(j,1);}}}void display(){uchar i,j,time[4];time[0]=HOUR/10;time[1]=HOUR%10;time[2]=MIN/10;time[3]=MIN%10;j=0x01;for(i=0;i<4;i++){P2=j;switch(i){case 1:P0=DSY_CODE[time[i]]&0x7f;break;case 3:if(flag==0) P0=DSY_CODE[time[i]]&0x7f; else P0=DSY_CODE[time[i]];break;default:P0=DSY_CODE[time[i]];}delay1ms(16);j=_crol_(j,1);}}/*void keyscan(){if(P1!=0xff) delay1ms(150);if(P1!=0xff){switch(P1){case 0xfe:HOUR=HOUR+1;if(HOUR==24) HOUR=0;break;case 0xfd:MIN=MIN+1;if(MIN==60) MIN=0; break;case 0xfb:time_or_temperature++; break;}}}*/void main(){uchar i=0;HOUR=0;MIN=0;SECOND=0;count_t0=0;count_t1=0;TMOD=0x11;TH0=0x3c;TL0=0xb0;TH1=0x3c;TL1=0xb0;EA=1;ET0=1;ET1=1;TR0=1;TR1=1;SPK=0;read_temperature();delay(5000);delay(5000);while(1){i=time_or_temperature%2;if(i==0) display();if(i==1){read_temperature();if(ds18b20_is_ok) display_temperature(); } //keyscan();}}void T0_int() interrupt 1 using 1{TH0=0x3c;TL0=0xb0;count_t0=count_t0+1;if(count_t0==10) flag=!flag;if(count_t0==20){count_t0=0;SECOND=SECOND+1;if(SECOND==60){SECOND=0;MIN=MIN+1;if(MIN==60){MIN=0;HOUR=HOUR+1;if(HOUR==24){HOUR=0;}}}}}void keyscan_t1() interrupt 3 using 2{count_t1=count_t1+1;TH1=0x3c;TL1=0xb0;if(P1!=0xff){key_flag=1;}if((count_t1==3)&&(P1!=0xff)&&(key_flag==1)) { count_t1=0;key_flag=0;switch(P1){case 0xfe:HOUR=HOUR+1;if(HOUR==24) HOUR=0; break;case 0xfd:MIN=MIN+1;if(MIN==60) MIN=0;break;case 0xfb:time_or_temperature++; break; }}if(count_t1>3){key_flag=0;count_t1=0;}}</k;i++)<>。
单片机汽车转向灯c语言,C51单片机嵌入式系统设计1——模拟汽车转向灯
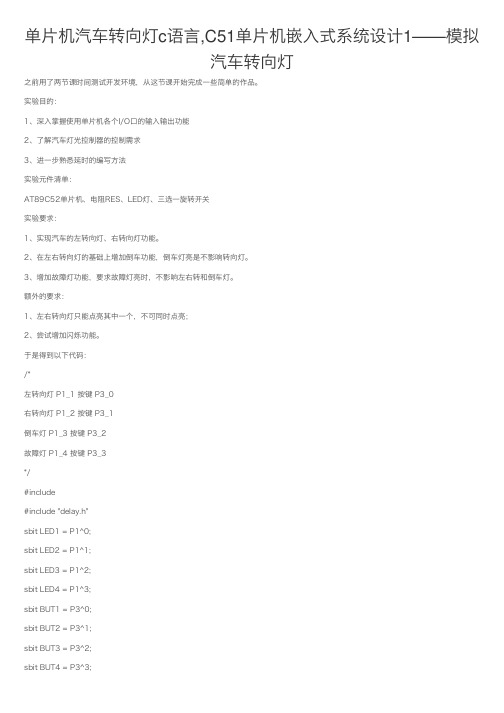
单⽚机汽车转向灯c语⾔,C51单⽚机嵌⼊式系统设计1——模拟汽车转向灯之前⽤了两节课时间测试开发环境,从这节课开始完成⼀些简单的作品。
实验⽬的:1、深⼊掌握使⽤单⽚机各个I/O⼝的输⼊输出功能2、了解汽车灯光控制器的控制需求3、进⼀步熟悉延时的编写⽅法实验元件清单:AT89C52单⽚机、电阻RES、LED灯、三选⼀旋转开关实验要求:1、实现汽车的左转向灯、右转向灯功能。
2、在左右转向灯的基础上增加倒车功能,倒车灯亮是不影响转向灯。
3、增加故障灯功能,要求故障灯亮时,不影响左右转和倒车灯。
额外的要求:1、左右转向灯只能点亮其中⼀个,不可同时点亮;2、尝试增加闪烁功能。
于是得到以下代码:/*左转向灯 P1_1 按键 P3_0右转向灯 P1_2 按键 P3_1倒车灯 P1_3 按键 P3_2故障灯 P1_4 按键 P3_3*/#include#include "delay.h"sbit LED1 = P1^0;sbit LED2 = P1^1;sbit LED3 = P1^2;sbit LED4 = P1^3;sbit BUT1 = P3^0;sbit BUT2 = P3^1;sbit BUT3 = P3^2;sbit BUT4 = P3^3;#define HIGH 1#define LOW 0int main(){for(;;){if(BUT1 == LOW && BUT2 == HIGH){ LED1 = LOW;delay();LED1 = HIGH;delay();}else{LED1 = HIGH;}if(BUT2 == LOW && BUT1 == HIGH){ LED2 = LOW;delay();LED2 = HIGH;delay();}else{LED2 = HIGH;}if(BUT3 == LOW){LED3 = LOW;delay();LED3 = HIGH;delay();}else{LED3 = HIGH;}if(BUT4 == LOW){LED4 = LOW;delay();LED4 = HIGH;delay();}else{LED4 = HIGH;}}}#includevoid delay(){int count = 0;for(count = 0; count < 30000; count++){}; }。
单片机汽车转弯信号灯模拟设计
单片机汽车转弯信号灯模拟设计传统汽车的车灯操纵系统一样采纳继电器与独立模式操纵,这使汽车内电线较多,造成严峻的电磁干扰,使系统可靠性下降。
因此考虑通过运用单片机操纵汽车信号灯,简化电路,减少干扰,从而使系统有用可靠,并增加汽车的安全性能。
〝汽车转弯信号灯单片机操纵系统〞要紧是对单片机并行输入/输出口电路的应用,即通过I/O口,增加复位电路、驱动电路、按键电路来模拟汽车转弯系统功能。
由于汽车有左转弯、右转弯、刹车、合紧急开关等操作,而且可能会组合出多种操作情形。
因此在编写程序时要多方面考虑信号灯存在的各种不同情形,期望能尽量包含多种功能,使操纵系统能满足现实需要。
本设计要紧的工作是绘制电路原理图,分析设计输入与输出操纵端的功能模块,通过编写程序代码操纵亮灯键值及闪耀的成效,再进行仿真模拟汽车驾驶时信号灯的各种情形。
仿真后对电路系统进行PCB图绘制,通过电路板实物制作及调试验证汽车信号灯单片机操纵系统的操作可行性。
观看分析设计的结果,进行反馈,完善该操作系统。
关键词单片机;汽车转弯;信号灯;程序设计;调试AbstractTraditional auto light control system generally uses the relay with the independent mode control, this makes the wire inside the car more, causes serious electromagnetic interference, and makes the system reliability descend. So I consider using single-chip microcomputer control car lights to simplify the circuit and reduce the interference, so that the system is practical and reliable, and it can increase the safety performance of cars. "Car lights turn single-chip microcomputer control system" is mainly the application of single chip microcomputer parallel input/output circuit, namely, through the I/O port reset circuit, drive circuit, key circuit to simulate the vehicle turning system functions. Because the car has left turning, right turning, braking, emergency switch, etc, and it can compose a variety of operating conditions. So in many respects when you write a program signals exist various situation, hope to be able to try to contain a variety of functions, can the control system meet the needs of the reality. This design is to plot circuit principle diagram, analyze the design inputs and outputs to the control function module, by writing the program code lights control keys and the flashing effect, and carries on the simulation of light when the car driving situations. After simulation and PCB circuit diagram drawing, it can test circuit board and debug the operational feasibility of the control system. To observe the result of the analysis and design, feedback, will improve the operating system.Key words Single chip microcomputer Cars turning Signal light Programming Debugging目录摘要 .................................................................................................................. 错误!未定义书签。
单片机设计报告——汽车转向灯
单片机课程设计报告项目8模拟汽车左右转向灯控制专业:电检121学生姓名:学号: 18 、 19指导教师:目录一、目的及要求1、任务目的 (1)2、任务要求 (1)3、电路及元器件 (1)二、设计1、设计说明 (2)2、任务分析 (6)3、程序设计 (6)4、硬件电路板电路图 (8)5、程序及下载 (9)6、程序运行测试 (10)三、小结1、任务小结 (11)2、心得体会 (12)一、任务目的:通过采用单片机制作一个模拟汽车左右转向灯的控制系统。
二、任务要求:汽车转向灯显示状态(图一)采用两个发光二极管来模拟汽车左转灯和右转灯,用单片机的P1.0和P1.1引脚控制发光二极管的亮、灭状态;用两个连接到单片机P3.0和P3.1引脚的拨动开关S0、S1,模拟驾驶员发出左转、右转命令。
P3.0和P3.1引脚的电平状态与驾驶员发出的命令的对应关系如下表所示。
(图二)比较上面两表可以看到,P3.0引脚的电平状态与左转灯得两灭状态相对应,当P3.0引脚的状态为1时,左转灯熄灭;当P3.0引脚的状态为O时,左转灯闪烁。
同样,P3.1引脚的状态与右转灯的亮灭状态相对应三、电路设计:单片机模拟汽车左右转向灯控制系统电路图如下图三,并行口P1的P1.0和P1.1控制两个发光二极管,当引脚输出为0时,相应的发光二极管点亮;P3口得P3.0和P3.1各自分别连接一个拨动开关,拨动开关的一端通过一个4.7K电阻连接到电源,另一端接地。
当波动开关S0拨至2时,P3.0引脚为低电平,P3.0 = 0;当拨至位置1时,P3.0引脚为高电平,P3.0 = 1。
拨动开关S1亦然。
单片机模拟汽车左右转向灯控制系统所需要的元器件清单如下表:简介(AT89C51)简介AT89C51是一种带4K字节闪烁可编程、可擦除的8位只读存储器(FPEROM—Flash Programmable and Erasable Read Only Memory),可在低电压下工作。
基于单片机的汽车转向灯设计报告
基于单片机的汽车转向灯设计报告设计报告:基于单片机的汽车转向灯一、引言汽车转向灯是车辆行驶中非常重要的安全设备之一,用于提醒其他车辆和行人司机的转向意图。
本设计报告介绍了基于单片机的汽车转向灯的设计原理、硬件和软件结构以及设计过程和结果。
二、设计原理在汽车转向灯的设计中,我们使用单片机进行控制。
设计原理主要包括以下几个方面:1. 单片机控制:通过单片机控制的方式,实现转向灯的开关和闪烁效果。
2. 信号输入:通过车辆转向灯开关和信号,将转向灯开关信号输入到单片机中。
3. 信号输出:通过单片机控制转向灯开关的开闭,控制车辆转向灯的点亮和熄灭。
三、硬件设计硬件设计部分主要包括以下几个方面:1. 单片机选择:根据所需的功能和性能要求,选择合适的单片机。
可以选择低功耗的单片机,以节约能源。
2. 输入部分:连接转向灯开关的输入引脚,以接收来自车辆开关的信号。
3. 输出部分:连接转向灯的输出引脚,将单片机的控制信号输出到转向灯。
四、软件设计软件设计部分主要包括以下几个方面:1. 初始化设置:设置单片机的引脚功能和状态,配置转向灯引脚为输出模式。
2. 输入检测:检测转向灯开关的状态,判断是否有转向灯开关信号输入。
3. 状态控制:根据转向灯开关的状态,控制转向灯的开闭和闪烁效果。
4. 循环判断:通过循环的方式,不断检测转向灯开关的状态和控制转向灯的开闭和闪烁。
五、设计过程设计过程主要包括以下几个步骤:1. 确定功能需求:根据实际需求,确定转向灯的开闭和闪烁效果。
2. 选取单片机:根据功能需求和性能要求,选择合适的单片机。
3. 设计硬件:根据单片机的引脚功能和状态,设计连接转向灯开关和输出引脚的电路连接方式。
4. 设计软件:根据硬件设计和功能需求,编写单片机的控制程序。
5. 测试验证:将设计好的电路和程序进行组装和测试,验证其功能和性能是否符合要求。
六、设计结果经过测试验证1. 能够准确地接收转向灯开关的信号。
2. 具备灵敏的控制响应速度,能够迅速控制转向灯的开闭和闪烁。
单片机应用技术项目6 汽车转向灯
汽车信号灯
知识目标:
1.掌握独立式键盘的工作原理与应用;
2.掌握C语言选择语句的使用; 3.掌握选择语句if-else、if-else if-else的语法特点;掌
握典型分支结构程序设计和调试方法。
技能训练目标: 1.熟悉C51对并行I/O端口作输入口操作的编程方法;
2.熟练使用典型分支结构程序设计和调试方法。
二、按键结构与特点
机械式按键在按下或释放时,由
键按下
于机械弹性作用的影响,通常伴随
有一定时间的触点机械抖动,然后 其触点才稳定下来。
其抖动过程如右图所示,抖动时
间的长短与开关的机械特性有关, 一般为510ms。
前沿抖动
后沿抖动
若有抖动,按键按下会被错误地
认为是多次操作。
闭合 稳定
按键触点的机械抖动
位运算
&
^ |
8
9 10 11 12 14
从左至右
从左至右 从左至右 从左至右 从左至右 从右至左
逻辑与 逻辑或 赋值运算与复合赋值运算
&& || = +=、-=、*=、 /=、%=、&=、^=、|=、
选择(分支)语句
1、if 语句 2、if……else语句
3、if-else if-else语句
4、switch/case 语句。
C语言知识
1、运算符和表达式
2、选择(分支)语句
运算类型
运算符
() ! * + << < <= == > != / >> >= ~ %
优先级
1 2 3 4 5 6 7
结合性
从左至右 从右至左 从左至右 从左至右 从左至右 从左至右 从左至右
单片机课件设计:汽车转向灯 (1)
错误!未指定书签。
学号:班级:姓名:摘要随着单片机的日益发展,其应用也越来越广泛,通过对“汽车转弯灯单片机控制系统”设计,可以对单片机的知识得到巩固和扩张。
本设计是设计一个单片机控制系统。
在汽车进行左转弯、右转弯、刹车、合紧急开关、停靠等操作时,实现对各种信号指示灯的控制。
本设计主要是对单片机的并行输入/输出口电路的应用,通过I/O口控制发光二极管的亮﹑灭﹑闪烁,加上一些串口电路﹑按键电路﹑驱动电路来模拟汽车尾灯的功能并在PC机上显示此时的汽车行进状态。
汽车在驾驶时有左转弯、右转弯、刹车、合紧急开关、停靠等操作。
在左转弯或右转弯时,通过转弯操作杆应使左转开关或右转开关合上,从而使左头灯、仪表板左转弯灯、左尾灯或右头灯、仪表板右转弯灯、右尾灯闪烁;合紧急开关时要求前面所述的6个信号灯全部闪烁;汽车刹车时,两个尾灯点亮;如正当转弯时刹车,则转弯时原应闪烁的信号灯仍应闪烁。
以上闪烁,都是频率为1Hz的低频闪烁;在汽车停靠而停靠开关合上时,左头灯、右头灯、左尾灯、右尾灯按频率为30Hz 的高频闪烁。
通过做实物,编写程序,完成了设计的要求。
通过该设计,对单片机的认识有了更进一步的了解,对单片机的各个口的功能作用了解加深,对Protel,Proteus的应用更加熟练,对设计系统有了了解,掌握了一些设计方法,受益不少。
关键词单片机;汽车信号转弯灯;电路基础;数字电子1 绪论1.1 选题背景电子技术的发展经历了很长一段路程.而现在我们使用的微型电子技算机是超大规模集成电路所构成,它属于第四代计算机,而单片机则是微型计算机的一部分。
从1971年微型计算机问世以来,由于实际应用的需要,微型计算机向着两个不同的方向发展:一个是向高速度、大容量、高性能的高档微机方向发展;另一个则是向稳定可靠、体积小和价格廉的单片机方向发展。
由于科学技术的发展,由模拟电路或数字电路实现的大部分控制功能,现在能够使用单片机通过软件编程方法实现了。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单片机原理及系统课程设计1 引言随着单片机的日益发展,其应用也越来越广泛,通过对“汽车转向灯单片机控制系统”设计,可以对单片机的知识得到巩固和扩展。
本课程内容是设计一个单片机控制系统,在汽车进行左转弯、右转弯、刹车、合紧急开关、停靠等操作时,实现对各种信号指示灯的控制。
本设计主要是对单片机的并行输入/输出口电路的应用,通过I/O口控制发光二极管的亮﹑灭﹑闪烁,加上复位电路﹑按键电路﹑驱动电路来模拟汽车尾灯的功能。
汽车在驾驶时有左转弯、右转弯、刹车、合紧急开关、停靠等操作。
在左转弯或右转弯时,通过转弯操作杆应使左转开关或右转开关合上,从而使左头灯、仪表板左转弯灯、左尾灯或右头灯、仪表板右转弯灯、右尾灯闪烁;合紧急开关时要求前面所述的6个信号灯全部闪烁;汽车刹车时,两个尾灯点亮;如正当转弯时刹车,则转弯时原应闪烁的信号灯仍应闪烁。
以上闪烁,都是频率为1Hz的低频闪烁;在汽车停靠而停靠开关合上时,左头灯、右头灯、左尾灯、右尾灯按频率为10Hz的高频闪烁。
闪光器是通过调节镍铬丝的拉力和触点的间隙来满足频率要求的,灯泡功率的大小也会影响闪烁频率。
因此在更换闪光器或灯泡时调整比较困难。
同时,系统没有故检测,驾驶员无法知道车外的转向灯及示宽灯是否点亮,从而影响行车安全。
到目前为止,我们还没有发现能检测灯丝断这种故障的有效方法。
针对上述问题,我们用AT89C51单片机设计了一套汽车信号灯控制系统。
用LED产生闪光信号,同时能自动检测信号灯故障。
信号灯灯具的发展是随着汽车制造技术及电光源技术的发展而逐步完善的。
它经历了机油或煤油灯、乙炔气灯到电光源灯的发展历程。
现代汽车信号灯灯具已经开始使用发光二极管技术以及光导技术。
2 设计方案及原理2.1 设计方案基于上述的设计思想,本设计采用单片机控制,在控制系统中,选择了四个开关K1-K4、1个AT89C52单片机、6只发光二极管(用来模拟信号灯发光)。
其中AT89C52单片机做为控制核心,当4个开关的状态发生改变后,单片机检测到开关信号后就通过软件输出相关信号,来驱动6个汽车信号灯根据开关的相关状态闪烁或长亮。
信号灯由发光二极管模拟替代。
2.2 设计原理由定时器/计数器与中断系统的联合组成控制系统的工作原理。
如汽车上有一个转弯控制杆,其中有三个位置:中间位置,汽车不转弯;向上,汽车左转;向下汽车右转。
相应的操作如表2.1所示。
转弯时,规定左右尾灯、左右头灯仪表板上2个指示灯相应地发出闪烁信号。
应急开关合上时,6个信号灯都应闪烁。
汽车刹车时,2个尾灯发出不闪烁信号。
如正当转弯时刹车,转弯时原应闪烁的信号仍应闪烁。
它们都是频率为1Hz低频闪烁,在汽车停靠而停靠开关合上时,左头灯、右头灯、左尾灯、右尾灯按频率为10Hz频率快速闪烁。
任何在下表中未出现的组合,都将出现故障指示灯闪烁,闪烁频率为10Hz。
表2.1各种操作对应的指示灯输出左指示灯右指示灯左头灯右头灯左尾灯右尾灯左转弯右转弯合紧急开关刹车左转弯时刹车右转弯时刹车刹车并合紧急开关左转弯时刹车,并合紧急开关右转弯时刹车,并合紧急开关停靠闪烁灭闪烁灭闪烁灭闪烁闪烁闪烁灭灭闪烁闪烁灭灭闪烁闪烁闪烁闪烁灭闪烁灭闪烁灭闪烁灭闪烁闪烁闪烁10Hz灭闪烁闪烁灭灭闪烁闪烁闪烁闪烁10Hz闪烁灭闪烁亮闪烁亮亮闪烁亮10Hz灭闪烁闪烁亮亮闪烁亮亮闪烁10Hz2.3 汽车转向灯显示在汽车转弯或应急状态下,外部信号灯和仪表板它们指示灯的闪烁频率为1HZ,称低频信号。
当停靠开关合上时,外部信号灯以10HZ频率闪烁此时为高频信号。
3 硬件设计3.1 汽车转向灯单片机控制系统汽车转向灯单片机控制系统电路是由单片机AT89C51、电源、ULN2003A7路反向器、LED显示电路、按键电路构成、用户I/O口外,其余管教是为实现系统扩展而设置的。
因此,本设计实际上就是一个带有8个发光二极管的单片机最小应用系统,即为由单片机80C51、发光二级管和必要的软件组成的单个单片机系统。
此系统利用单片机的P3.0-P3.4作为输入,P1.0-P1.6作为输出。
当P3口输入高电平,在经过ULN2003A反向器时输出低电平与二极管阳极的5V电源构成通路,使对应的LED点亮或闪烁。
电源电路给控制相关电路提供所需电源;复位电路供上电或按键时复位用。
当要求重新启动单片机或者单片机处于死循环时,都可以由此电路来实现;时钟电路用来产生时钟脉冲信号,供工作使用;通过并行I/O口构成键盘和显示电路,输入程序,即可实现汽车转向灯中各信号灯的功能操作;系统的可靠性有所提高。
3.2 汽车转向灯单片机控制系统电路图在硬件设计中,使用型号为AT89C51的单片机,并把P3.0和P1.0作为电路的输入口和输出口。
再使用了一片ULN2003A芯片,ULN2003A是一个7路反向器,即当输入端为高电平时ULN2003A输出端为低电平,当输入端为低电平时ULN2003A输出端为高电平。
ULN2003A一端与单片机P1.0口相连,另一端与二极管的阴极相连,给二极管与P3.0输入端相反的电平。
二极管的阳极与5V的电源相连。
开关可以分别吸合或组合吸合来控制二极管。
硬件连接电路图如图3.1所示。
图3. 1 硬件连接电路图4 软件设计4.1 程序设计软件的设计用Keil编程实现,具体的程序见附录A。
P3.0的输入控制LED的状态。
流程图如图4.1所示。
图4.1 主程序流程图5 proteus仿真结果给80C51装入程序,连接好电路图后,按刹车键后,运行结果如图5.1所示。
通过仿真可以验证程序和仿真电路的正确性。
按下紧急开关、停靠、左转弯、右转弯以及其它组合状态后仿真结果符合题目要求。
图5.1 系统仿真结果6 总结本系统基于MCS-51开发平台,充分利用了51单片机的各引脚功能,同时有效利用了中断、查询、定时器、计数器,使得汽车转向信号灯控制得以实现。
而在此设计过程中遇到了以下一些问题:仿真图中总线的连接、程序的中断方式和查询方式、单片机中P3口的功能。
而对于仿真图中总线连接问题,在通过在百度搜索和翻阅有关Proteus书籍来实现仿真图中的总新连接。
通过翻阅课本了解到程序的查询方式又称有条件传递方式,即数据的传送石有条件的。
在进行发送数据时先进行发送,然后进行查询。
而接收数据是先进行查询,然后进行接收。
而程序的中断方式,它与查询方式的主要区别在于如何知道设备是否为数据传送作好了准备,查询方式是单片机的主动形式,而中断方式则是单片机等待通知(中断请求)的被动形式。
中断方式在发送数据时的过程是先发送,再进行等待中断,最后在中端中发送。
中断方式的接受数据先进行等待中断,然后再中断中进行接受。
虽然通过这些资料对着两种方式有了一些了解,但也不是很明白。
所以在以后的学习中要更加强这方面的知识。
最后是对单片机P3口的认识。
虽然已经学习了单片机,但对单片机不是很了解,特别是P3口的认识。
P3口的第一功能是普通用的8位准双向I/O端口。
而P3口的主要功能是第二功能,如串行口的输入\输出,还有两个中端和两个定时器/计数器。
在本次设计的汽车转向灯控制系统中,还存在的问题是系统的源程序比较繁杂,仿真的效果有点简单。
在实现基本功能时没在进行深入的拓展,总体上感觉是系统的设计过于简单。
参考文献[1] 孙涵芳,徐爱卿. MCS-51.96系列单片机原理及应用[M].北京:北京航空航天大学出版社,1988:100-115.[2] 徐爱钧,彭秀华.Keil Cx51 V7.0单片机高级语言编程与μVision2应用实践[M].北京:电子工业出版社,200:133-187.[3] 余锡存,曹国华.单片机原理及接口技术[M].陕西:西安电子科技大学出版社,2000:7:60-75.附录A汽车转向灯控制源程序ORG 0000HAJMP START1ORG 0030HSAME EQU 4EHSTART1:MOV P1,#00HSTART: MOV A,P3ANL A,#1FH ;取用P3口的低五位数据CJNE A,#1FH,SHIY ;对P3口低五位数据进行判断AJMP START1SHIY: MOV SAME,ALCALL YSMOV A,P3 ;读P3口的数据ANL A,#1FH ;取用P3口的低五位数据CJNE A,#1FH,SHIY1 ;对P3口的低五位数据进行判断AJMP START1 ;开关没有动作时无输出SHIY1: CJNE A,SAME,START1CJNE A,#17H,NEXT1 ;进入左转分支AJMP LEFTNEXT1: C JNE A,#0FH,NEXT2 ;进入右转分支AJMP RIGHTNEXT2: C JNE A,#1DH,NEXT3 ;进入紧急分支AJMP EARGENEXT3: C JNE A,#1EH,NEXT4 ;进入刹车分支AJMP BRAKENEXT4: C JNE A,#16H,NEXT5 ;进入左转刹车分支AJMP LEBRNEXT5: C JNE A,#0EH,NEXT6 ;进入右转刹车分支AJMP RIBRNEXT6: C JNE A,#1CH,NEXT7 ;进入紧急刹车分支AJMP BRERNEXT7: C JNE A,#14H,NEXT8 ;进入左转紧急刹车分支AJMP LBENEXT8: C JNE A,#0CH,NEXT9 ;进入右转紧急刹车分支AJMP RBENEXT9: C JNE A,#1BH,NEXT10 ;进入停靠分支AJMP STOPNEXT10: AJMP ERRORLEFT: MOV P1,#2AH ;左转分支LCALL Y1sMOV P1,#00HLCALL Y1sAJMP STARTRIGHT: MOV P1,#54H ;右转分支LCALL Y1sMOV P1,#00HLCALL Y1sAJMP STARTEARGE: MOV P1,#7FH ;紧急分支LCALL Y1sMOV P1,#00HLCALL Y1sAJMP STARTBRAKE: MOV P1,#60H ;刹车分支AJMP STARTLEBR: MOV P1,#6AH ;左转刹车分支LCALL Y1sMOV P1,#40HLCALL Y1sAJMP STARTRIBR: MOV P1,#74H ;右转刹车分支LCALL Y1sMOV P1,#20HLCALL Y1sAJMP STARTBRER: MOV P1,#7EH ;紧急刹车分支LCALL Y1sMOV P1,#60HLCALL Y1sAJMP STARTLBE: MOV P1,#7EH ;左转紧急刹车分支LCALL Y1sMOV P1,#40HLCALL Y1sAJMP STARTRBE: MOV P1,#7EH ;右转紧急刹车分支LCALL Y1sMOV P1,#20HLCALL Y1sAJMP STARTSTOP: MOV P1,#66H ;停靠分支LCALL Y100msMOV P1,#00HLCALL Y100msAJMP STARTERROR: MOV P1,#80H ;错误分支LCALL Y1sMOV P1,#00HLCALL Y1sAJMP STARTYS: MOV R7,#20H ;延时YS0: MOV R6,#0FFHYS1: DJNZ R6,YS1DJNZ R7,YS0RETY1s: MOV R7,#04H ;延时Y1s1: MOV R6,#0FFHY1s2: MOV R5,#0FFHDJNZ R5,$DJNZ R6,Y1s2DJNZ R7,Y1s1RETY100ms: MOV R7,#66H ;延时Y100ms1:MOV R6,#0FFHY100ms2:DJNZ R6, Y100ms2DJNZ R7, Y100ms1RETEND单片机原理及系统课程设计报告- 10 -。