汽车自动巡航系统的PID控制
汽车自动巡航系统的PID控制研究
汽车自动巡航系统的PID控制摘要目前,汽车巡航控制系统的控制算法已有各种算法,如模糊控制、最优控制等高级技术等,由于PID控制方法更为成熟,设计、操作方便,应用更为广泛。
本文就是对自动巡航系统采用PID控制,并通过仿真进行分析。
本文对汽车巡航控制系统进行研究。
考虑了定速和跟车两种驾驶模式并通过决策模块进行切换,并引入逆模型对模型进行了分析,使之适用于巡航控制系统的研究。
研究了可用于汽车巡航控制的控制方法,建立了PID控制系统模型。
整个控制系统应用ACC的逆模型,以比例—积分—微分(PID)算法建立控制器,调整控制器参数,构成有效的控制系统。
利用MATLAB/SIMULINK,在已有数学模型基础上,建立了整个系统的两大主要仿真模块:决策模块和ACC控制模块。
构建起了整个仿真系统,调整了各个仿真模块的参数,仿真结果较为合理。
关键词:巡航控制系统;PID控制;仿真AbstractAt present, the automobile cruise control system control algorithm had each algorithm,if controls, the optimum control fuzzily and so on the high-level technology and so on.. Because of maturer and ease of operation, the PID control method is more widespread. This article is uses the PID control to the automatic cruise system, and carries on the analysis through the simulation.This article conducts the research to the automobile cruise control system.We had considered the constant speed and carries on the cut with the vehicle two kind of driving patterns and through the policy-making module,and introduced the counter model to carry on the analysis to the model,to make it suitabling in the cruise control system research.We has studied available in the automobile cruise control method, and has established the PID control system model. In entire control system, we take the operating speed and the cruise vehicle speed error as an input value, and the operating speed as output value, then we use the counter model of ACC. Taking a proportion–integral--differential (PID) controller as the controller to adjustment the controller on line,then we constitute the effective control system.Using MATLAB/SIMULINK, we had in the mathematical model foundation.And we has established the overall system two big main simulation module: Policy-making module and ACC control module,to constructed the entire simulation system.We has adjusted each simulation module parameter, causes the simulation system reasonably, the accurate simulation real system.Key Words:Cruise control system;PID control;Simulation目录摘要 (I)Abstract (II)1 绪论 (1)1.1 课题研究的目的和意义 (1)1.2 自动巡航系统研究现状及发展趋势 (2)1.3 论文研究内容 (5)2 汽车巡航系统模型的建立 (6)2.1 自动巡航系统ACC的建模 (6)2.1.1 ACC系统的结构分析 (6)2.1.2 ACC逆模型的建立 (7)2.2 决策模块的建立 (8)2.2.1 决策系统介绍 (8)2.2.2 上位系统的建立 (8)2.3 模块的封装 (10)3 增量式PID控制算法设计 (11)3.1 PID控制器的设计 (11)3.2 PID控制算法的选择 (12)3.3 控制系统采样周期的选择 (13)3.4 PID控制器的仿真分析 (13)4 系统仿真及分析结果 (15)4.1 仿真语言简介 (15)4.2 仿真及结果分析 (15)结论 (18)参考文献 (19)致谢.................................................................................................. 错误!未定义书签。
巡航飞行航向位置实时跟踪PID控制器设计
巡航飞行航向位置实时跟踪PID控制器设计谢晓方;刘家祺;孙涛;梁捷【摘要】For the problem that arrival time at way point can be easily disturbed by wind in airspeed holding cruising,the heading position tracking controller is designed based on ground speedplementary filter should be added into feedback to suppress the high frequency wind which causes thrust not calm in airspeed control.Ground speed feedback can simultaneously suppress the interference of wind to thrust and speed,proportional-integral-differential (PID) controller keeps practical heading position tracking moving virtual target in ideal path,so as to make arrival time at each way point precisely controlled.Applying the controller to aircraft's longitudinal dynamics simulation model,the simulation results show that the heading position and speed can accurately track the corresponding reference signalsunder the condition of alternating wind disturbance.%针对空速保持巡航飞行中航路点到达时刻易受阵风干扰影响的问题,设计了基于地速控制的航向位置跟踪控制器.空速控制中为抑制高频阵风引起推力不平静需在反馈中加入互补滤波器,而地速反馈可以同时抑制阵风对推力和地速的干扰,通过PID控制实际航向位置跟踪理想航迹上移动虚拟目标,使到达各个航路点时刻准确可控.将其应用到飞机的纵向动力学仿真模型中,仿真结果表明在交变阵风干扰情况下航向位置和地速能精确跟踪相应的参考信号.【期刊名称】《现代防御技术》【年(卷),期】2017(045)006【总页数】7页(P101-106,112)【关键词】航迹跟踪;航路点;航向位置;到达时间;空速保持;PID控制【作者】谢晓方;刘家祺;孙涛;梁捷【作者单位】海军航空工程学院兵器科学与技术系,山东烟台264001;海军航空工程学院兵器科学与技术系,山东烟台264001;中国人民解放军92768部队,广东汕头515828;海军航空工程学院兵器科学与技术系,山东烟台264001;海军航空工程学院兵器科学与技术系,山东烟台264001【正文语种】中文【中图分类】V249;TP391.90 引言航迹跟踪控制是飞行任务计划执行的关键环节,现代电传操纵的综合飞行控制系统主要由飞行管理、飞行导引和飞行控制3个子系统组成。
基于模糊PID的汽车巡航控制系统设计

题目:基于模糊PID的汽车巡航控制系统设计基于模糊PID的汽车巡航控制系统设计摘要汽车巡航控制系统是一种辅助驾驶系统,它不但可以减轻驾驶员的负担,还可以提高驾车的舒适性.汽车巡航控制系统具有非线性、时变不确定性,并受到外界扰动、复杂的运行工况等影响。
本文介绍了一种基于模糊PID控制算法的汽车巡航控制系统。
本文对汽巡航控制系统进行了简要的分析,将模糊PID控制方法作为其控制方案,对现有的PID控制进行完善和优化,并设计出系统的模糊控制器。
以轿车为对象,分析了汽车在行驶过程中的驱动力及受到的各种阻力和干扰力,并建立起汽车纵向动力学模型。
利用MATLAB建立了系统的仿真模型,利用MATLAB软件中的模糊逻辑工具箱对系统的设计进行仿真,验证系统设计的可行性,并对汽车巡航控制系统进行了仿真和分析.由仿真结果可知,模糊PID控制方法能使系统的超调减小、反应速度加快、控制效果良好,是一种适用于汽车巡航控制系统的控制方法.关键词:定速巡航控制系统;MATLAB;模糊PID;仿真The Design of Controller of Automobile Cruise Control SystemBased On Fuzzy-PIDABSTRACTAutomobile cruise control system,which could not only relieve the drivers burden,but also could make the driving comfortable.it is a kind of accessorial driving system,Cruise control system has high nonlinearity and non-determinacy with time changing.And CCS,which is effected by some factors such as external load disturbers and complicated running modes,A kind of CCS which is based on Fuzzy PID control,it is introduced in the thesis.Analyzing the cruise control system briefly, Fuzzy—PID is confirmed as the control method of the system,improved and optimized the PID control. Then the Fuzzy PID controller is designed,As the object is a car,the thesis analyzes the resistances and disturbs while the car's running,And the automobile dynamics model is given,After setting up the model by means of MATLAB,use the Fuzzy Logic Toolbox in MATLAB software to simulate the design of the system,to verify the feasibility of the system design, the result is analyzed,From the result,we may know that Fuzzy PID control could make the overshoot smaller and the response time shorter,The effect of Fuzzy PID method is given.SO it is a suitable method for CCS.Keywords:cruise control system;MATLAB;Fuzzy PID;simulation目录1 绪论 (1)1.1 课题的意义 (1)1。
acc pid方法
acc pid方法ACC PID方法是一种用于控制系统的自动控制算法。
ACC代表自适应巡航控制(Adaptive Cruise Control),而PID代表比例积分微分控制(Proportional Integral Derivative Control)。
这种方法常用于汽车的巡航控制系统中。
在ACC PID方法中,ACC系统使用传感器来检测车辆与前方车辆之间的距离和相对速度。
PID控制器根据这些传感器的输入,计算出适当的巡航控制指令。
这样,ACC系统可以自动调整车辆的速度,以保持与前方车辆的安全距离。
比例控制(P)是PID控制的第一部分,它根据车辆与前方车辆之间的距离差异来调整巡航速度。
比例控制器的输出与距离差的乘积成正比。
例如,如果距离变化较大,则输出也会相应增加,从而调整车辆的速度。
积分控制(I)是PID控制的第二部分,它根据车辆与前方车辆之间的速度差异来调整巡航速度。
积分控制器累计速度差异并应用于控制指令。
这样,即使速度变化较小,也可以对车辆速度进行微调,以保持稳定的巡航。
微分控制(D)是PID控制的第三部分,它根据距离和速度变化的速率来调整巡航速度。
微分控制器计算速度变化率的导数,并将其应用于控制指令。
这样,可以更好地响应距离和速度的突然变化。
通过结合比例、积分和微分控制,ACC PID方法可以实现智能地调整车辆的巡航速度,并保持安全距离。
这种方法不仅提高了驾驶的舒适性和便利性,还有助于减少交通事故的发生。
不过,ACC PID方法的设计和参数调整需要经验和精确的调试,以确保系统的稳定性和性能。
ACC PID方法是一种在巡航控制系统中常用的自动控制算法。
通过比例、积分和微分控制的组合,ACC PID方法能够智能地调整车辆的速度,并保持与前方车辆的安全距离。
这种方法在汽车驾驶中起到了重要的作用,提高了驾驶的舒适性和安全性。
基于PID算法的汽车巡航系统研究
基于PID算法的汽车巡航系统研究毕强【摘要】设计了基于freescale单片机的汽车巡航系统控制器,它能够判断设定车速和实际车速之间的差值,采用PID控制算法,对发动机节气门开度进行闭环控制。
设计了CAN总线接口,方便系统与其它车载电子系统的通信和信息交换。
该控制器结合适当的执行结构,就可以自动保持车辆的定速行驶,减轻了驾驶疲劳,提高了车辆的安全性。
%Aimed at the security and the comfort capability request, the car crmse system t Gt:5) based on tree scale single chip was designed. The system estimate the difference of the set car speed and the actual car speed, adopt the PID arithmetic, control the valve of the accelerograph in closed loop. And the CAN bus interface was designed, make the communication with other electronic system on the car conveniently. This system can keep the car speed automatically, lighten the drive tire, and improve the security of the car.【期刊名称】《九江职业技术学院学报》【年(卷),期】2012(000)002【总页数】4页(P12-14,9)【关键词】巡航控制;PID算法;Freescale单片机;CAN总线【作者】毕强【作者单位】九江职业技术学院,江西九江332007【正文语种】中文【中图分类】TM38随着国民消费水平的提高,人们对于汽车的舒适性的要求越来越高。
汽车巡航系统PID控制器设计
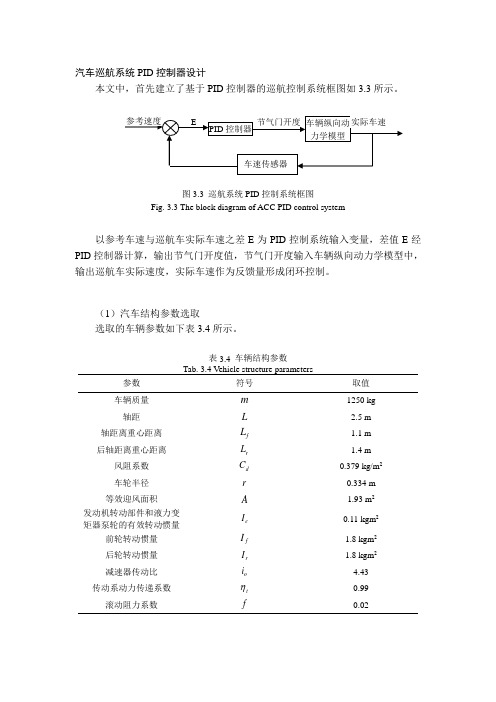
汽车巡航系统PID控制器设计本文中,首先建立了基于PID控制器的巡航控制系统框图如3.3所示。
图3.3 巡航系统PID控制系统框图Fig. 3.3 The block diagram of ACC PID control system以参考车速与巡航车实际车速之差E为PID控制系统输入变量,差值E经PID控制器计算,输出节气门开度值,节气门开度输入车辆纵向动力学模型中,输出巡航车实际速度,实际车速作为反馈量形成闭环控制。
(1)汽车结构参数选取选取的车辆参数如下表3.4所示。
表3.4 车辆结构参数Tab. 3.4 Vehicle structure parameters参数符号取值车辆质量m1250 kg轴距L 2.5 m 轴距离重心距离f L 1.1 mL 1.4 m 后轴距离重心距离rC0.379 kg/m2风阻系数d车轮半径r0.334 m等效迎风面积A 1.93 m2发动机转动部件和液力变I0.11 kgm2矩器泵轮的有效转动惯量e前轮转动惯量f I 1.8 kgm2I 1.8 kgm2后轮转动惯量r减速器传动比o i 4.43 传动系动力传递系数t 0.99滚动阻力系数f0.02(2)仿真工况设计论文设定仿真时间140s,设计了多种仿真工况,包括低速行驶状态下匀加速、匀速,高速行驶状态下匀加速、匀速及匀减速工况。
具体描述为初始时刻巡航车静止,前方目标车辆以12km/h起步并以0.8m/s2加速度加速至20km/h,然后以此速度匀速前进30s,在40s时再以1.5 m/s2加速至80km/h,保持80km/h速度匀速前进至120s,最终再以-0.5m/s2匀减速行驶。
汽车巡航系统PID控制仿真模块,它由纵向动力学模块及其控制器模块组成。
纵向动学模块包括发动机模块、液力变矩器模块、自动变速器模块以及车辆传动、行驶系及整车运动系统模块。
车辆纵向动力学模块仿真框图图中,FDJ——发动机子模块;YLBJQ——液力变矩器模快;CD——传递模块;CLDLX——车辆传动、行驶系及整车运动系统模块。
基于Matlab和模糊PID的汽车巡航控制系统设计

基于Matlab和模糊PID的汽车巡航控制系统设计一、本文概述随着汽车工业的快速发展和智能驾驶技术的不断进步,汽车巡航控制系统作为提高驾驶安全性和舒适性的重要手段,越来越受到人们的关注。
传统的巡航控制系统主要依赖于PID(比例-积分-微分)控制算法,虽然在一定程度上能够实现车速的稳定控制,但在面对复杂多变的道路环境和驾驶员的个性化需求时,其性能往往难以达到最优。
为了解决这个问题,本文将研究并设计一种基于Matlab和模糊PID的汽车巡航控制系统。
该系统将结合传统PID控制算法的稳定性和模糊控制算法的灵活性,通过Matlab进行建模与仿真,实现对汽车巡航速度的更精确、更智能的控制。
本文将介绍汽车巡航控制系统的基本原理和PID控制算法的基本原理;详细阐述模糊PID控制算法的设计思路和实现方法;然后,通过Matlab进行仿真实验,验证所设计的模糊PID控制算法在汽车巡航控制系统中的有效性和优越性;对本文的研究成果进行总结,并展望未来的研究方向和应用前景。
本文的研究不仅有助于提升汽车巡航控制系统的性能,同时也为智能驾驶技术的发展提供了新的思路和方法。
二、汽车巡航控制系统概述汽车巡航控制系统是一种先进的驾驶辅助系统,旨在通过自动调节发动机的油门或制动系统,使车辆能够在驾驶员设定的速度下稳定行驶,而无需持续踩踏油门踏板。
这种系统不仅可以提高驾驶的舒适性,减少驾驶员的疲劳感,而且在长途驾驶或高速公路上行驶时,能有效提高行车安全性。
巡航控制系统的核心在于其控制策略,它需要根据车辆当前的速度、加速度、道路条件以及驾驶员的设定速度等多个因素,进行实时计算和判断,以决定如何调整发动机的输出或制动力度。
传统的PID (比例-积分-微分)控制器因其简单性和有效性,在巡航控制系统中得到了广泛应用。
然而,由于实际驾驶环境的复杂性和不确定性,传统的PID控制器往往难以应对各种突发情况,如突然出现的障碍物、道路坡度变化等。
为了解决这个问题,近年来,基于模糊逻辑的控制器被引入到汽车巡航控制系统中。
基于汽车行驶速度随动系统的模糊PID控制及仿真
Ec 、 U ,是一个双输入三输出的二维模糊控制器。速度
偏差 E 、速度偏差变化率 Ec 和输出论域 U 均用 NB(负 大)、NM(负中)、NS(负小)、Z0(零)、PS(正小)、
第 37 卷第 5 期
准论域分配结果如表 1 所示。
唐山师范学院学报
输出部分标准论域分配结果如表 2 所示。
k p ki kd 0.05 ,
表1
e 和 ec 的标准化论域 ec
e
-6 NB NM NS ZO PS PM PB 1 0.2 0 0 0 0 0 -5 0.8 0.7 0 0 0 0 0 -4 0.4 1 0.1 0 0 0 0 -3 0.1 0.7 0.5 0 0 0 0 -2 0 0.2 1 0.1 0 0 0 -1 0 0 0.8 0.6 0 0 0
e
NB NB NM NS ZO PS PM PB PS PS ZO ZO ZO PB PB NM NS NS NS NS ZO ZS PM
表4
ki 的模糊控制规则 ec
NS NM NM NS NS ZO PS PS ZO NM NS NS ZO PS PS PM PS NS NS ZO PS PS PM PM PM ZO ZO PS PM PM PB PB PB ZO ZO PS PM PB NB PB
────────── 收稿日期:2015-06-09 作者简介:白永鑫(1979-) ,男,河北石家庄人,工程师,研究方向为车、内燃机、机床试验检测与产品研发。 -60-
白永鑫:基于汽车行驶速度随动系统的模糊 PID 控制及仿真
1.2 数学模型
汽车行驶速度随动系统包括:速度操纵机构位置变 换器、模糊 PID 控制器和汽车动力机构三部分,各部分 的数学模型如下。 变量,以实现汽车行驶速度的实际值与设定值相等。
基于模糊PID的汽车巡航控制系统研究
1910.16638/ki.1671-7988.2020.24.007基于模糊PID 的汽车巡航控制系统研究*张宝玉(江苏食品药品职业技术学院,江苏 淮安 223001)摘 要:汽车巡航控制系统(以下简称“CCS ”)可以降低汽车排气污染,文章为提高汽车巡航的精度和稳定性,在研究模糊PID 控制方法基础上,结合Matlab/Simulink 对汽车巡航模糊控制进行了建模,为后续仿真工作以及结构优化提供了可靠保障。
关键词:模糊巡航;车辆动力学系统;建模;响应速度中图分类号:U495 文献标识码:A 文章编号:1671-7988(2020)24-19-03Research on Automobile Cruise Control System Based on Fuzzy PID *Zhang Baoyu(Jiangsu Food & Pharmaceutical Science College, Jiangsu Huai ’an 223001)Abstract: Automobile cruise control system (Shorthand "CCS") can reduce automobile exhaust pollution. In this paper, in order to improve the accuracy and stability of automobile cruise, based on the study of fuzzy PID control method, com -bined with Matlab/Simulink to model the automobile cruise fuzzy control, Providing a reliable guarantee for subsequent simulation work and structural optimization.Keywords: Fuzzy cruise; Vehicle dynamics system; Modeling; Response speed CLC NO.: U495 Document Code: A Article ID: 1671-7988(2020)24-19-031 汽车巡航控制原理汽车巡航系统是一个典型的闭环反馈控制系统,其原理如下图1所示。
《基于综合PID算法的汽车巡航控制系统》_自动控制理论课程设计报告
《自动控制理论》课程设计报告题目:基于综合PID算法的汽车巡航控制系统姓名:**班级:自1202 学号: ********2014年7月基于综合PID算法的汽车巡航控制系统设计报告摘要:随着我国经济实力的不断增强,人们的生活水平也在不断提升,伴随着的汽车消费也进入了大众化阶段,人们对汽车驾驶的安全性和舒适性要求也越来越高。
汽车巡航控制技术的不断革新正是这一现象的重要体现。
本设计报告所研究的汽车巡航控制系统是一种闭环控制,综合采用位置式和增量式PID控制算法。
由于位置式PID控制算法运算量大,对微处理器的性能要求高,增量式PID控制算法抗外界干扰能力弱,所以PID控制器的微分环节采用位置式PID控制算法,积分和比例环节采用增量式PID控制算法,以此弃其不足,集其长处,综合两者以达到最佳的控制效果。
关键词:巡航控制、位置式PID控制算法、增量式PID控制算法、仿真研究Abstract:With the growing of China's economic strength, people's living standards are rising too.Along with the automobile consumption has also entered the popular phase.The vehicle driving safety and comfort were required higher and higher.The new innovation of vehicle cruise control technology is one of the important embodiment of this phenomenon.This design report study of vehicle cruise control system is a closed-loop control system.It is comprehensive used position type and incremental PID control algorithm. For the position type PID control algorithm’s computational is very large,it must be have high performance microprocessor.I ncremental PID control algorithm’s ability of resist Outsider Interference is very weak.So,PID controller’s differentiation element is utilized position type PID control algorithm,its integral and proportional element is utilized incremental PID control algorithm.This method can abandon its disadvantage and set its strengths, Integrated both two in order to achieve the best control effect.Keywords:Cruise control,Position type PID control algorithm,Incremental PID control algorithm,Simulation study1.引言汽车巡航控制系统,简称CCS。
基于Matlab和模糊PID的汽车巡航控制系统设计
基于Matlab和模糊PID的汽车巡航控制系统设计仇成群刘成林沈法华陈杰盐城师范学院物理科学与电子技术学院,盐城224002 摘要:该文设计了一种基于Matlab和模糊比例积分微分PID (proportional-integral-derivative)的汽车定速巡航控制系 统,该巡航控制系统由模拟数字信号输入装置、定速巡航控制电子控制单元和节气门执行器等器件组成。
为提高汽车巡 航的精度和稳定性,提出了一种基于Matlab和模糊PID的自适应模糊控制方法,该控制算法在线优化模糊控制规则以及 输出比例因子,既保留了传统模糊控制的优点,又有效改善了系统的控制品质,实车试验结果表明,试验车(上海大众 帕萨特1.8 MT)在40、60、80、100 km/h定速巡航控制系统稳定时间分别在38、53、65、80 s,超调量分别是0.5、0.4、 1.2、1.0 km/h。
该系统稳定速度快,超调量小,系统工作稳定,可以较好地满足汽车巡航系统中控制需求。
汽车;控制系统;模糊控制;速度;Matlab10.3969/j.issn. 1002-6819.2012.06.032TP273A1002-6819(2012)-06-0197-062011-01-252011-08-18基金项目:江苏省高校自然科学基金项目(项目编号:10KJB170012);江苏省教育厅产业化资助项目(项目编号:JS10-44)作者简介:仇成群(1980-),男,江苏盐城人,讲师,主要从事汽车电子产品设计与应用、模糊逻辑和神经网络研究等。
盐城 盐城师范学院物理科学与电子技术学院,224002。
Email:qiuchengqun2000@sina.com刘成林(1964-),男,江苏盐城人,博士,教授,主要从事模糊逻辑和光电技术研究等。
盐城 盐城师范学院物理科学与电子技术学院,224002。
Email: qcqqcq@126.com万方数据万方数据 由图5可见,巡航车速接万方数据万方数据@@[1] 王连军.汽车巡航控制系统的使用与发展[J].中国高新技 术企业,2009,121(10): 9-10.Wang Lianjun. Using and development of automobile cruise control systems[J]. Chinese Hi-Tech Enterprises, 2009,121( 10): 9 - 10. (in Chinese with English abstract)@@[2] 付百学,马彪,潘旭峰.现代汽车电子技术[M].北京:北 京理工大学出版社,2008: 68-119.@@[3] 吕安涛,毛恩荣,宋正河,等.一种拖拉机自动驾驶 复合模糊控制方法[J].农业机械学报,2006,37(4): 17-20.Lü Antao, Mao Enrong, Song Zhenghe, et al. A complex fuzzy control technique of tractor automatic steering[J]. Transactions of the Chinese Society for Agricultural Machinery, 2006, 37(4): 17-20. (in Chinese with English abstract)@@[4] Kaizu Y, Yokoyama S, Imou K, et al. Vision-based navigation of a rice transplanter[C]//2004 CIGR International Conference. Beijing: IEEE, 2004: 144- 147.@@[5] 周俊,姬长英.视觉导航轮式移动机器人横向预测模糊控 制[J].农业机械学报,2002,33(6): 76-79. Zhou Jun, Ji Changying. Lateral predictive fuzzy logic control for wheeled mobile robot navigated by machine vision[J]. Transactions of the Chinese Society for Agricultural Machinery, 2002, 33(6): 76-79. (in Chinese with English abstract)@@[6] Noguchi N, W ill J, Reid J, et al. Development of a master-slave robot system for farm operations[J]. Computer and Electronics in Agriculture, 2004, 44(1): 1-19.@@[7] 王立新,王迎军.模糊系统和模糊控制[M].北京:清华大 学出版社,2003: 120-165.@@[8] 闻新,周露,李东江,等.Matlab模糊逻辑工具箱的分析 与应用[M].北京:科学出版社,2001: 79-169.@@[9] Mizumoto M. Min-max-gravity method ver sus product-sum-gravity method for fuzzy controls[C]//Proe, Ⅳ IFSA Congress(Part E). Brussels: IEEE, 1991: 127- 130.@@[10] Mizumoto M. Realization of PID controls by fuzzy control methods[C]//Proc IEEE International Conference on Fuzzy System. San Diego: IEEE, 1992: 709-715.@@[ 11 ] Xu Jianxin, Hang Changchieh, Liu Chen. Parallel strcture and tuning of a fuzzy PID controller[J]. Automatica, 2000, 36(5): 673 -684.@@[12] Kocaarslan I, Cam E. Experimental modeling and simulation with adaptive control of a power plant[J]. Energy Conversion and Management, 2007, 48(3): 787- 796.@@[13] Zhang Z. A flexible new technique for camera calibration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(11): 1330-1334.@@[14] Greg M, Mike M D, Mark B S. Towards an understanding of adaptive cruise control[J]. Transportation Research, 2001, 9(1): 3-51.@@[15] Higashimata A, Adachi K, Hashzume T, et al. Design of a headway distance control system for ACC[J]. JSAE Review, 2001, 22(2): 15-22.@@[16] Mayr R. Robust performance for autonomous intelligent cruise control systems[C]// Conference on Decision and Control. Tampa: IEEE, 1998: 487-492.@@[17] Liu Zhaodu, Lu Jiang, Shi Kaibin, et al. Integrated ABA/ASR/ACC system for cars[J]. Journal of Beijing Institute of Technology, 2001, 10(3): 104-108.@@[18] Vlad O P, Fukuda T, Vachkov G. Neuro-fuzzy motion controller design using improved simple genetic algorithm[C]// IEEE International Symposium on Computational Intelligence in Robotics and Automation. Kobe: IEEE, 2003: 1469- 1474.@@[19] Kim J H, Lee S H, Wang Hongmei. Similarity measure application to fault detection of flight system[J]. Journal of Central South University of Technology, 2009, 16(5): 789-793.万方数据@@[20] Leng G, Thomas M G, Girijesh P. An approach for on-line extraction of fuzzy rules using a self-organizing fuzzy neural network[J]. Fuzzy Sets and Systems, 2005, 150(2): 211- 243.@@[21]陈汉玉,左承基,袁银男,等.轻度混合动力汽车运行模式控制[J].农业工程学报,201 1,27(10): 61 - 67.Chen Hanyu, Zuo Chengji, Yuan Yinnan, et al. Operating mode control research of mild hybrid electric vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(10): 61 -67.Design of automobile cruise control system based on Matlab and fuzzy PID Qiu Chengqun Liu ChenglinShen Fahua Chen Jie万方数据基于Matlab和模糊PID的汽车巡航控制系统设计作者:仇成群, 刘成林, 沈法华, 陈杰, Qiu Chengqun, Liu Chenglin, Shen Fahua, Chen Jie作者单位:盐城师范学院物理科学与电子技术学院,盐城,224002刊名:农业工程学报英文刊名:Transactions of the Chinese Society of Agricultural Engineering年,卷(期):2012,28(6)被引用次数:10次参考文献(21条)1.王连军汽车巡航控制系统的使用与发展[期刊论文]-中国高新技术企业 2009(10)2.付百学;马彪;潘旭峰现代汽车电子技术 20083.吕安涛;毛恩荣;宋正河一种拖拉机自动驾驶复合模糊控制方法[期刊论文]-农业机械学报 2006(04)4.Kaizu Y;Yokoyama S;Imou K Vision-based navigation of a rice transplanter 20045.周俊;姬长英视觉导航轮式移动机器人横向预测模糊控制[期刊论文]-农业机械学报 2002(06)6.Noguchi N;W ill J;Reid J Development of a master-slave robot system for farm operations 2004(01)7.王立新;王迎军模糊系统和模糊控制 20038.闻新;周露;李东江Matlab模糊逻辑工具箱的分析与应用 20019.Mizumoto M Min-max-gravity method ver sus product-sum-gravity method for fuzzy controls 199110.Mizumoto M Realization of PID controls by fuzzy control methods 199211.Xu Jianxin;Hang Changchieh;Liu Chen Parallel strcture and tuning of a fuzzy PID controller 2000(05)12.Kocaarslan I;Cam E Experimental modeling and simulation with adaptive control of a power plant 2007(03)13.Zhang Z A flexible new technique for camera calibration 2000(11)14.Greg M;Mike M D;Mark B S Towards an understanding of adaptive cruise control 2001(01)15.Higashimata A;Adachi K;Hashzume T Design of a headway distance control system for ACC 2001(02)16.Mayr R Robust performance for autonomous intelligent cruise control systems 199817.Liu Zhaodu;Lu Jiang;Shi Kaibin Integrated ABA/ASR/ACC system for cars 2001(03)18.Vlad O P;Fukuda T;Vachkov G Neuro-fuzzy motion controller design using improved simple genetic algorithm 200319.Kim J H;Lee S H;Wang Hongmei Similarity measure application to fault detection of flight system[期刊论文]-Journal of Central South University of Technology(English Edition) 2009(05)20.Leng G;Thomas M G;Girijesh P An approach for on-line extraction of fuzzy rules using a self-organizing fuzzy neural network 2005(02)21.陈汉玉;左承基;袁银男轻度混合动力汽车运行模式控制 201 (10)引证文献(10条)1.仇成群基于LabVIEW和模糊PID的汽车巡航控制系统设计[期刊论文]-机械工程师 2013(3)2.仇成群基于LabVIEW的汽车巡航控制系统设计[期刊论文]-装备制造技术 2013(2)3.田泱.仇成群基于模糊PID的汽车巡航控制系统设计[期刊论文]-机械工程师 2013(10)4.赵秀春.徐国凯.张涛.葛平淑基于模糊控制的车辆自适应巡航系统设计[期刊论文]-大连民族学院学报 2013(5)5.王艳平.冯世杰基于机器视觉的茶叶等级区分[期刊论文]-信阳农业高等专科学校学报 2012(3)6.王畅.秦加合.郭明华.孙勤英.张文霞智能汽车换道控制算法的仿真研究[期刊论文]-计算机工程与设计 2013(7)7.孙骏.徐回.胡悦混联式混合动力叉车能量管理策略研究[期刊论文]-汽车工程学报 2013(6)8.吴付威.秦加合.任超伟.牛增良.张俊磊高速公路智能汽车自动超车控制算法仿真研究[期刊论文]-计算机工程与设计2013(7)9.王志洪.邵毅明.曹初一种汽车自适应前大灯控制系统的控制方法[期刊论文]-科学技术与工程 2013(34)10.董全成.冯显英基于自适应模糊免疫PID的轧花自动控制系统[期刊论文]-农业工程学报 2013(23)引用本文格式:仇成群.刘成林.沈法华.陈杰.Qiu Chengqun.Liu Chenglin.Shen Fahua.Chen Jie基于Matlab和模糊PID的汽车巡航控制系统设计[期刊论文]-农业工程学报 2012(6)。
基于PID控制的汽车定速巡航系统设计与试验
基于PID控制的汽车定速巡航系统设计与试验汽车定速巡航系统是一种能够保持车辆在设定速度范围内自动保持稳定车速的系统。
PID(比例-积分-微分)控制是一种常用的控制算法,它可以根据当前系统的状态进行调整,并使系统保持稳定的状态。
本文将介绍基于PID控制的汽车定速巡航系统的设计和试验。
首先,我们需要实现测量和控制系统的硬件设计。
这包括车速传感器,用于测量当前车辆的速度,并将其作为反馈信号输入到控制系统中。
另外,还需要设计一个执行器,例如节气门执行器,控制汽车的加速和减速。
这些硬件组件需要与控制器进行连接,以便能够实现相应的控制操作。
其次,我们需要设计PID控制器。
PID控制器由比例(P)、积分(I)和微分(D)三个部分组成。
比例部分用于通过比例调整来纠正系统的误差,积分部分用于积累误差并适应系统的变化,微分部分用于预测系统未来的变化趋势。
PID控制器的设计需要根据实际系统的特性进行参数调整,以达到系统稳定控制的目标。
接下来,我们进行系统的试验。
首先,我们需要通过实验测量得到汽车的速度-时间曲线。
然后,将测得的速度作为反馈信号输入到PID控制器中,控制器将根据设定的目标车速和当前的反馈信号调整执行器的操作,以实现保持车速稳定的目标。
在试验中,我们可以通过车速表或者车载仪表板上的车速显示来观察系统的效果。
在试验过程中,我们还可以对PID控制器进行参数调整和优化。
通过调整PID控制器的比例、积分和微分参数,可以改变系统的响应速度和稳定性。
例如,增加比例参数可以提高系统的快速响应能力;增加积分参数可以降低系统对干扰的敏感性;增加微分参数可以改善系统的稳定性。
通过不断调整参数,我们可以找到最优的PID参数,以实现最佳的控制效果。
综上所述,基于PID控制的汽车定速巡航系统设计和试验包括了硬件设计、PID控制器设计和参数调整三个主要步骤。
通过合理设计和优化PID控制器,我们可以实现车辆稳定巡航的目标,提高驾驶的舒适性和安全性。
汽车PID巡航系统控制策略浅析

汽车PID巡航系统控制策略浅析本文介绍了汽车巡航的功能,组成,作用和原理,分析了其中的传感器,控制器,执行机构的工作原理;通过对比PID控制,模糊控制,迭代学习控制和自适应控制的工作特点,分析了各种巡航控制策略的优劣。
标签:巡航;控制;PID0 引言汽车巡航控制是当下汽车发展中正在普及的一项技术,这项技术在汽车长途行驶中降低驾驶员疲劳驾驶,降低一些外在因素而发生的事故。
但是汽车巡航控制系统并没有发展完善,很多问题伴随驾驶員驾驶汽车时而产生。
巡航制控系统(Cruise Control System)简称CCS(车辆速度控制系统),是指在驾驶员不需要踩油门通过巡航控制器设置一个特定的车速而使行驶车辆车速不断在接近设定车速限制内行驶的控制装置[1]。
驾驶汽车在高速公路上行驶,虽然外界因素相对稳定,但驾驶时间长了还是需要适当的更改汽车行驶速度,长时间驾驶车辆对人各方面都会有一定的影响,容易出现不利于驾驶的因素产生,因此在汽车上安装巡航系统。
汽车巡航问世之后也伴随着一些问题的出现,比方巡航系统打开无法关闭,巡航系统在不同操作系统下的关闭方法不同。
在技术上也有一定的进步例如从以前单方面的让车保持一种车速下行驶到现在跟车定速等。
不管从巡航系统的不足到问题的分析还是从巡航系统的技术升级,我们都应该对汽车巡航系统控制系统进行分析,从而加强对技术的学习与研究深度,提升分析和解决问题的能力。
1 巡航系统发展方向进入21世纪以来,由于汽车电子元件越来越普遍地应用在汽车上以及各地公路、高速公路的不断发展,使得定速巡航系统已经逐步变得成熟,系统的电路以及布线有了很大的进步,控制部分更加快捷与精确,多路传送系统的技术变得更加成熟,故障自动报警系统发展得更加精准[2]。
总体看来,巡航系统的发展方向具体有以下几点:1.1 先进控制方法的引进车辆在行驶过程中的实际工况是很复杂的,它主要受到车载人员的人数、发动机的当前状况等因素的影响,驾驶员对舒适性的要求更高了,引入新技术的巡航控制系统在以传统的控制原理为基础,又引入不少先进的控制理论,目前,PID 控制,自适应控制和模糊控制等原理先后被研发使用[3]。
基于PID控制的定速巡航系统设计与仿真

基于PID控制的定速巡航系统设计与仿真作者:刘宗辉周禹池陈鑫溶来源:《科学导报·学术》2019年第27期摘要:在定速巡航的车辆中,对巡航控制系统的结构及功能进行了梳理,基于直流电机建立数学模型,建立了巡航系统的控制器算法,确定了控制器的关键参数,经Simulink仿真测试,使用PID控制的定速巡航系统在稳定性和动态性能均有较好的特性。
关键词:汽车;巡航控制系统;PID控制一、系统组成汽车定速巡航控制系统是利用先进电子技术对汽车行驶速度进行自动调节,从而实现以事先设定的速度行驶的电子控制装置。
由于不用驾驶员操控油门,从而降低了驾驶员的疲劳强度,改善汽车的燃油经济性和降低汽车排气污染。
汽车在高速公路上行驶时,高速公路上的车辆较普通公路少,速度基本稳定在一个区间,因此定速巡航系统非常适用于高速公路这种车辆较少,速度稳定的实际应用,一个完整定速巡航系统应包括输入信号与诊断模块、巡航功能控制模块、巡航速度控制模块等构成。
在多种信号的作用下,共同控制汽车定速时速度大小。
二、建立系统模型本文以直流电动机为研究对象,对直流电动机建立特性方程,通过直流电机的特性方程,来分析直流电机的性能,以及改进的策略。
2.1 直流电机模型建立额定励磁下,直流电机电压平衡关系和转矩平衡关系进行拉氏变换得到:由上方程组可以得到直流电机系统传递方程。
三、系统分析3.1 系统传递方程若负载为0,则可求得输入输出传递函数同时可得系统的开环传递函数3.2.3 频域分析图3-2 电机的Bode图和Nyquist图系统的幅值裕量为∞,相位裕量为85.19,幅值裕量和相位裕量处对应的频率值分别为无穷大与19.23,由于相位裕量为85.19 > 0,系统稳定。
从Nyquist图中也可以看出,特性曲线所围绕(-1,j0)点的圈数为0圈,开环传递函数在右侧无极点,因此Z=P-2N=0,开环系统稳定。
四、系统改进在时域的分析中,系统的超调量过大,响应时間极快,由此带来的问题是超调量大可能会损坏设备,因此可用测速反馈和PID调节对系统进行改进。
汽车自动巡航系统PID控制策略的研究
汽车自动巡航系统PID控制策略的研究摘要:文章介绍汽车自动巡航控制系统的结构组成和工作原理,选择基于Atmega 8 单片机的PID 控制策略实现车辆的稳定行驶及加速、减速的控制过程。
本系统能有效地减轻长途驾驶中驾驶员的工作强度,提高舒适性,并减少燃料消耗,利于环保。
关键词:自动巡航;PID;Atmega 80 引言据调查,10%的交通事故是由疲劳驾驶、操作不当引起的,本文介绍的汽车自动巡航控制系统可以有效地减轻驾驶员的疲劳,避免交通事故,并利于环保。
当在高速公路上长时间行驶时,打开该系统的自动操纵开关后,巡航控制系统将根据行车阻力自动增减节气门开度,避免驾驶员频繁踩油门踏板就可使汽车行驶速度保持一定,大大地减轻了驾驶员的疲劳强度。
由于巡航控制系统能自动地维持车速,避免了油门踏板不必要的人为变动,进而减少了汽车燃料的消耗和废气的排放。
1 汽车巡航控制系统的构成汽车电子自动巡航控制系统主要由巡航控制开关、车速传感器、电子控制单元(ECU)、汽车制动开关、执行器等组成。
电子自动巡航控制系统的组成部分及各部分在汽车内的安装如图1 所示。
下面将具体介绍各部分结构原理及功能。
(1)巡航控制开关。
当接通主开关后,若车速在巡航控制的范围内(一般为40~200km/h)时,断开设定/滑行开关,此时车速会存储于RAM 中,汽车维持此速度稳定行驶。
当驾驶员希望巡航的车速提高时,接通恢复/加速开关,巡航控制ECU 就会通过执行器使节气门的开度增大,使汽车加速行驶,此时,存储汽车实际车速参数的RAM 存储器处于动态刷新状态,开关断开瞬间时的车速存储于存储器,之后汽车将以此速度匀速行驶;当驾驶员希望稳定的车速降低时,接通设定/滑行开关,巡航控制ECU 就会通过执行器使节气门开度关小,汽车减速滑行,此时存储汽。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
专题论 述
汔 车自 动巡黼系统硇 PD控 制 I
大连 民族 学 院机 电信 息工程 学 院 朱丽 丽 赵 秀春
[ 摘 要] 本文对汽车巡航 控制 系统 , 基于 P D控 制理论针 对定速 和跟 车两种 驾驶模 式进行控制研 究。通过 MAT A I L B仿真表 明: 采
+
o
( 4 )
( 5 1
被 控 对 象 所 用 到 的是 控 制 量 的 增 量 ,则 要 导 出提 供 增 量 的 PD控 I 制算式 , 推导得 :
u_) l .) ∑ ( 1kl 1 k = +
=
争e1k《 l() Ii k 2 f _ )
则 推 出增 量 △ (1 uk: △l )uk一 (— )Kl()ek 1 Ke )K k+ ck 1 ek 2 lk= ()uk 1 k一 (- ) .k+ ()2(一 ) (一 ) ( = e + ( + K△ek+ 。k+ ̄Ae )A (一1 ()Ke )I[ ( - e ( k k () 6 K 为比例系数 、 . K 为积 分时间常数 、 为微分时 问常数 , K. 一旦确定
图 lA C系 统 结 构 图 C
定速巡航即在前方有效距离 内无 车时 ,根据 给定车速信号与反馈 信 号 , 过 控 制 器 控 制 本 车 按 照 设 定 的 巡 航 速 度 行驶 ; 跟 车 巡 航 系 统 通 而 在前方有车时 , 系统通过测距雷达检测 与前车的实际距离 , 凋节控制信 号来保持期望的车辆行驶速度。 而提 高驾驶员 的驾驶舒适度 , 从 以减轻 疲劳 。 2 自动巡航 系统 PD控制算法设计 。 I 在汽 车巡航控制 系统 中, I P D控制 器与被控对 象共 同组成 系统 的 闭环 。PD控制器设计的好坏直接影响到控制效果。 I 21 I 制 基 本 原 理 . PD控 自动巡航系统 PD控制原理为 : I 在汽车行驶过程 中 , 驾驶员设定一 个车速给控制器 , 同时车速传感 器测得的实际车速也输 入控制器 , 产生 实际车速和设定车速 的偏差( 设为 △ )控 制器的 比例部分根据偏 差的 v, 大小输出相应 的控制量 ,控 制节气门 的开度 ,使车速迅 速趋近设定车 速。 考虑到偏差一 直存在 , 控制器的积分部分就把偏差累加起米加大控 制量 , 消灭偏差 , 使车速保持 恒定 , 而微分部分则起预估作崩 :当 A > vO 时, 表示偏差在加大 , 及时增 加控制量 , △ 减 小 ; A < 时 , 就 是 v 当 v O 表示 偏差在减 小, 则减小控制量 , 避免 △ v趋近于零时 , 又有反方 向发展 而引 起 震 荡 PD控 制 器 的 原 理 图 如 图 2所示 : I
图 3自动巡航 系统仿真 图
图 2PD控 制 机 器 原 理 图 I 22PD控 制 算 法 设 计 . I 设 系统给定值为 r)实际输 出值为 【 (, I f ) 则误差 et :(=(一(, (为 e)r) £ ) t t ) 通过 PD系统调节后的输出值 ut I f为: )
这三个系数 , 只需要反复测量求其偏差 . 就可以求出控制增 量。
3系 统仿 真 . 应用 MA L T AB仿真平台 , 对其进行仿真研 究 , 具体参数选取 如下 : 车速 v4 /. nb 与前 车距离 d 1 m。PD控 制器参 数为 : 1 O = 036 O , k =8 I KF O ; K= 0; 7 。仿真 如图 3所示 。 3 K= 0
r , r0 T, 、
图 4定 速 巡 航 车 速 仿 真 曲 线 图 5跟 车 巡 航 车距 输 出 曲线 仿 真结果表 明: 对于时速为 4 k g 0 n h的定速巡航 系统 ( 图 4 , 如 )该方 法具有较好 的速度跟随性 ,系统超 调量与调节时间均可控制在较小 的 范围, 能够达 到实际应用 的要求 。图 5为跟车巡航的为车距仿真 曲线 , 初 始车距为 8 m,经过 1 可以与前 车距 离一直 可以保持在设 定值 0 8秒 lm以上满足系统的设计要求 , 8 具有较好 的控制效果 。 4结 论 .
用增量式 PD控制方法结构 简单 、 I 控制策略 成熟、 易于应用 , 能够获得理 想的 定速巡航和跟 车巡航控制效果。 且
[ 关键词 ] 巡航控制 系统
引言
PD控制 仿真 I
1k tT =
if 1
近年来 汽车巡航控制 系统( 又称恒速控制 系统 ) 越来越 被许多高级 汽车所装备 , 这种控制系统能够 自动控制 发动机油门开度 , 使得驾驶 员 不用控制加速踏板 , 而能保证汽 车以设 定的车速稳定行驶 , 从而降低 了 驾驶员 的疲劳强度。目前汽车巡航控 制系统 的控制算 法已有各种算法 , 如模糊控制 、 最优控 制等高级 控制 策略 , 由于 PD控 制方法 更为简 I 单、 成熟 设计 、 操作方便 , 应用更为广泛口 本文就是对 自动巡航 系统采 j : 用 PD控制, I 并通过仿真进行分析 一 1 动 巡 航 控 制 系 统 的 组 成 启 自 动巡航系统主要 由定速 和跟 车两大子系统构成 。通过车速传感 器与测距雷达所测 出的车距和 反馈信号作为定速系统与跟车 系统之 间 进行切换信号 , 同时通过外部信号来判断进入或者退出巡航 系统。系统 主要由对定速系统和跟车系统之 间切换 的执行器 、I PD控 制器 、 转换并 输 出控制节气 门开度和制动踏板信 号. 被控对象即汽车动力模 型。 系 其 统结构 如图 1 示: 所
{ot K e ) 0 ed (t
】 _ f {
t l d
( 3 )
 ̄
( I I J ( 1 k : _ ] -) Z T =
将() 到() , 到离散的 P D表达式 为 : 3带 1中 得 I
LK( l p) ( {+ k e ) k =
+ _ 争 州k1 I ) }