五轴联动数控机床旋转轴中心坐标的自动测量程序设计
数控五轴加工中心编程的方法及步骤
数控五轴加工中心编程的方法及步骤小伙伴!今天咱们来唠唠数控五轴加工中心编程这个事儿。
一、了解加工零件。
咱得先好好看看要加工的零件长啥样。
就像认识新朋友,得知道它的轮廓、尺寸、精度要求这些。
你得清楚哪里是平面,哪里是曲面,有没有啥特殊的形状。
这就好比给零件做个全身检查,心里有数了,编程的时候才能有的放矢。
二、确定加工工艺。
这一步可重要啦。
要想清楚用啥刀具合适呢?大零件和小零件用的刀具可能就不一样。
还有切削的参数,就像炒菜放多少盐、多少油一样,切削速度、进给量、切削深度都得定好。
这得根据零件的材料来,要是硬邦邦的材料,那切削参数就得小心调整,不然刀具可能就受不了啦。
工艺路线也得规划好,先加工哪里,后加工哪里,就像规划旅行路线一样,得合理安排。
三、建立坐标系。
这个就像是给零件在加工中心里找个家。
确定一个原点,然后X、Y、Z轴就像房间的坐标一样,每个点都有自己的位置。
五轴加工中心还有两个旋转轴呢,这两个轴的坐标系也要确定好。
这就像给零件的每个部分都贴上了地址标签,加工的时候刀具才能准确找到地方。
四、编写程序。
现在就开始正儿八经写程序啦。
用那些编程代码,像G代码、M代码之类的。
比如说G00就是快速定位,让刀具快速跑到指定位置。
编写的时候要按照之前确定的加工工艺来。
如果有曲面的话,可能得用一些特殊的编程方法,像宏程序之类的。
这就像写作文,要按照一定的逻辑和规则来写,不能乱写一气。
五、模拟加工。
程序写好可别着急让加工中心干活。
先模拟一下,就像演习一样。
看看刀具的路径对不对,有没有可能撞到零件或者夹具。
要是模拟的时候发现问题,那就赶紧修改程序。
这就像出门前检查一下东西有没有带齐,发现没带钥匙还能及时补上。
六、实际加工。
经过前面的步骤,没问题啦,就可以让加工中心开始干活啦。
不过在加工的时候也不能完全不管,得盯着点。
万一有啥突发情况,像刀具磨损啦,还能及时处理。
数控五轴加工中心编程就是这么个事儿,看起来有点复杂,但是只要一步一步来,多实践,肯定能掌握的。
高精度五轴联动数控设备回转中心与主轴端面距离的意义及测量方式
高精度五轴联动数控设备回转中心与主轴端面距离的意义及测量方式作者:边成明蔺琦斌夏才来源:《科技与创新》2016年第17期文章编号:2095-6835(2016)17-0086-02摘要:在加工汽轮机叶片的叶身曲面、凸台、叶身与叶冠、叶根连接处的弧面时,必须由五轴联动数控设备来完成,而设备回转中心与主轴端面的距离值直接参与了数控系统的插补运算。
该值的准确性成为了影响汽轮机叶片加工质量的关键因素。
因此,对多种不同类型设备提出了该距离值的两种测量方式。
关键词:汽轮机叶片;五轴联动;回转中心;主轴端面中图分类号:TG659 文献标识码:A DOI:10.15913/ki.kjycx.2016.17.086众所周知,叶片是汽轮机的心脏,其复杂的曲面造型必然会成为加工中的重点和难点。
我公司现有多种类型的高精度五轴联动数控加工中心,包括C.B.Ferrari S630/A176、Mazak e-420H、DMG CTXgamma1250TC、XKH1600/800、LIECHTI TM2000/1400、HAMUELHSTM300等80余台设备。
叶片的加工精度要求非常高,有些公差要求甚至在0.02 mm内,因此,设备回转中心与主轴端面距离值的准确性显得尤为重要。
由于该数值直接影响了系统插补运算的准确性,根据多年对五轴联动设备的使用、加工经验,本文首先介绍了该距离值的应用意义,并对不同类型的设备提出了不同的测量解决方案。
1 应用介绍1.1 五轴联动设备结构五轴联动加工中心有高效率、高精度的特点,工件一次装夹就可完成多面体的加工,它可以使刀具与加工零件实现五轴联动,从而使刀具的切削刃部分始终沿着所需加工曲面的切面方向移动,使曲面加工达到理想的切削状态。
五轴联动加工中心大多为“3+2”的结构,即x,y,z三条直线运动轴加上分别围绕x,y,z轴旋转的a,b,c三个旋转轴中的两个旋转轴组成。
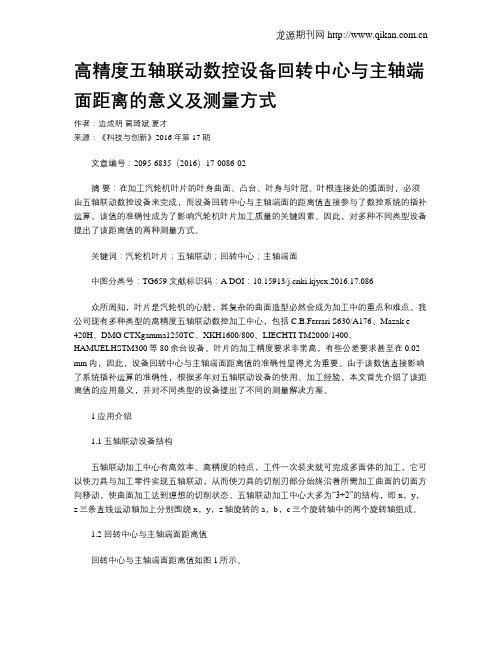
1.2 回转中心与主轴端面距离值回转中心与主轴端面距离值如图1所示。
五轴数控机床转动轴与平动轴联动的轮廓误差仿真分析
文 章 编 号 :0 1 2 5 2 1 ) 3— 0 1— 4 1 0 —2 6 ( 0 2 0 0 2 0
五 轴 数 控 机 床 转 动轴 与 平 动轴 联 动 的 轮 廓 误 差 仿 真 分 析 木
霍彦波 , 杰雄 , 丁 谢 东 , 杜 丽 , 王 伟
( 子 科 技 大 学 机 械 电 子 工 程 学 院 , 都 6 13 ) 电 成 17 1 摘 要 : 主轴 头 两摆 的五 轴联 动数 控机 床 为研 究 对 象, 转动 轴 与 平动 轴 联 动加 工不 同空 间位 置 圆 以 对
基金项 目: 国家 科 技 重 大 专 项 ( 0 0 X 4 1 0 1 2 1 Z 0 0 5— 1 ) 作 者 简 介 : 彦 波 ( 9 6 ) 男 , 家庄 人 , 霍 18 一 , 石 电子 科 技 大学 机 械 电 子 工 程 系 硕 士 研 究 生 , 究 方 向 为 制 造 装 备 的 检 测 、 制 与 自 动 化 , E — 研 控 (
p o e ma hn efr n e a d b au bef ra j sme ta d mane a c fC c ieto . r v c iep ro ma c n e v la l o du t n n itn n eo NC ma hn o 1
比 较 刀 具 理 想 位 置 与 实 际位 置 的 偏 差 , 而 得 到 轮 廓 误 差 曲 线 。 通 过 仿 真 曲 线 分 析 了轮 廓 误 差 的 分 从
布 特 性 , 到 了各 参数 对轮 廓误 差影 响 的对 应 关 系, 用这种 关 系检 测机 床 , 到提 高机 床 性 能 的 目 得 利 达
弧 时的轮 廓误 差 进行 了分 析 。采 用 D H( eai Ha e b r) — D n v — r n eg 法对按 不 同圆弧 路 径 加 工 时各 轴 的进 t t 给指 令 计算公 式 进行 了推 导 , 并将 指 令 输入 到 动 态仿 真 工具 Sm l k构建 的进 给 系统仿 真 模 型 中, i ui n
五轴机床里面的坐标变换原理

五轴机床及其应用领域五轴机床是一种具有五个工作轴的数控机床,分别为X、Y、Z三个线性轴和A、C 两个旋转轴。
其中,X、Y、Z轴分别代表机床的三个线性方向,而A、C轴则分别代表机床绕X轴和Z轴旋转的方向。
五轴机床具有较高的加工精度和加工效率,广泛应用于航空航天、汽车、模具等领域。
五轴机床的坐标变换原理是指通过一系列的坐标变换,将加工物体在机床坐标系下的坐标转换为工件在机床工作空间内的坐标,以实现精确的切削加工。
坐标变换原理是五轴机床能够实现复杂曲面加工的基础,下面将详细介绍与坐标变换原理相关的基本原理。
坐标系及坐标变换在五轴机床中,通常使用三个坐标系来描述加工物体的位置和姿态。
分别为机床坐标系(MCS)、工件坐标系(WCS)和刀具坐标系(TCS)。
其中,MCS是机床的固定坐标系,WCS是工件的坐标系,而TCS是刀具的坐标系。
机床坐标系(MCS)是机床固定不动的坐标系,由机床制造商定义。
它通常以机床的主轴中心为原点,X轴指向机床的前方,Y轴指向机床的左侧,Z轴指向机床的上方。
工件坐标系(WCS)是以被加工工件为参考的坐标系,它的原点和轴向可以根据加工需要进行定义。
工件坐标系的选择应能够最大程度地简化加工过程,使得刀具的运动轨迹能够与工件的几何形状相匹配。
刀具坐标系(TCS)是以刀具为参考的坐标系,它的原点和轴向通常与机床坐标系相同。
刀具坐标系的选择应能够方便地描述刀具的位置和姿态,并且与工件坐标系之间的转换关系简单明了。
坐标变换是将工件坐标系(WCS)中的坐标转换为机床坐标系(MCS)中的坐标的过程。
坐标变换通常包括平移变换和旋转变换两个部分。
平移变换将工件坐标系的原点从工件的某一特定点移动到机床坐标系的原点,而旋转变换则是将工件坐标系沿着某一特定轴旋转到与机床坐标系重合。
平移变换平移变换是将工件坐标系(WCS)中的坐标转换为机床坐标系(MCS)中的坐标的一种基本变换方式。
平移变换通过将工件坐标系的原点从工件的某一特定点移动到机床坐标系的原点来实现。
发那科五轴加工中心任意轴旋转测量程序的开发
圆园19,57(4)收稿日期:2018年8月1研究背景高速动车组采用铝合金型材结构,部件组焊后局部变形大,在加工中经常需要调用测点值进行补偿来保证尺寸精度及形位公差要求。
在测点过程中,由于测点位置的特殊性或躲避工装干涉,经常需要旋转主轴来完成测点工作,并将测点值保存为当前工件坐标系中的数值,而并非主轴旋转后所建立的坐标系中的数值。
基于以上需求,笔者开发了发那科五轴加工中心任意轴旋转测量程序。
2测量系统工作原理测量系统是数控机床或加工中心在线检测系统的关键部分,直接影响在线检测的精度[1]。
常用的测头有机械式测头、红外线测头、无线电测头、激光测头等。
随着数控加工技术的不断发展,红外线测头在数控机床加工领域的作用日益凸显。
进行数控机床在线检测时,需要生成检测主程序。
将检测主程序由通信接口传输至数控机床,测头在一定的距离范围内以一定的速度和一定大小的力与工件接触。
接触时接触点的位置在机床坐标系中的坐标值立刻被记忆,并通过红外线传输存储至目标存储地址[2]。
3G 代码指令及系统参数发那科30i 数控系统中,G 代码指令中的G31为跳转功能指令。
在指令执行期间,如果输入一个外部跳转信号,则中断指令执行,转而执行下一个程序段。
系统参数#5061存储跳转信号接通瞬间机床的X 轴坐标值,#5062存储跳转信号接通瞬间机床的Y 轴坐标值,#5063存储跳转信号接通瞬间机床的Z 轴坐标值[3]。
4测量宏程序编制方法测量宏程序是加工中心在线检测的依据,是使测头按照一定速度和特定路线执行测量任务的命令集。
测量某个零件前,需要编制零件的检测程序,将零件的检测元素、几何参数、测头规划运动路径及其它辅助动作,按所用加工中心规定的指令代码及程序格式编制成零件检测程序单,再将程序单输送至数控系统,从而指挥加工中心实现检测功能[4-6]。
5安全性原则测量路径的安全性指测量过程中工件和测头的安全性,既要避免测头对工件擦伤,又要避免工件或夹具对测头产生超程撞击。
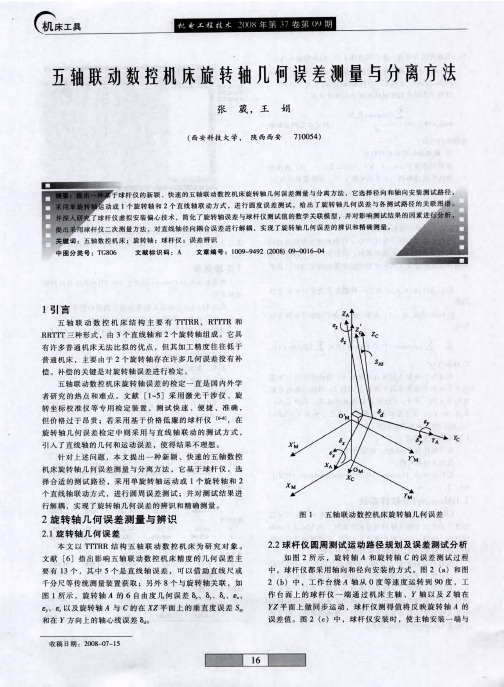
五轴联动数控机床旋转轴几何误差测量与分离方法
关联误差
:
赴
A ’ 。 ’、、
Ae ‘ A
8
; /
轴 C径向测试
轴 径 测 A 向试
\ I R \
.
一 一・
/
l
,
: :: : :, /
关联误差
z一
8 d 8
r
£
= s
L
£
▲
l s :
轴旋 转 即可 ,消 除 了机 床 、y线 性 轴 耦 合误 差 。 图 2 ( ) d 中 ,球 杆 仪 和工 作 台相 对 静止 ,绕 C轴 作 3 0度 圆度 测试 。 6
,
中心 轴 线 物 理 状 态发 生 变 化 如 产 生 偏 角 和 位 移 ,而 球 杆 仪
主轴一 端仍然按 照预定 的轨迹运 行 ,两者之 间形成偏 差 , 此 偏 差 值 即 是 旋 转 轴 几何 误差 综 合 作 用 的结 果 。
。
R R rI T -I ’ 种 形 式 I 三
,
由 3 个 直线轴 和 2 个旋转轴组 成
,
它具
有许 多 普通 机 床无 法 比拟 的优 点 普通 机 床 偿
。 ,
但其加工 精 度往往低 于
主 要 由于 2 个 旋转 轴存 在 许 多几 何误 差 没 有 补
。
补 偿 的关 键 是 对 旋 转 轴 误 差 进 行 检 定
。
2 2
.
球 杆 仪 圆周 测 试 运 动 路 径 规 划 及 误 差 测 试 分 析
如图 2 所示
,
文 献 [6 ] 指 出影 响 五 轴 联 动 数 控 机 床 精 度 的 几 何 误 差 主
五轴联动数控机床简单介绍

五轴联动数控机床简单介绍pptxx年xx月xx日•介绍•工作原理•技术参数目录•操作流程•维护保养01介绍五轴联动数控机床是一种高精度、高效率的数控机床,具有五个运动轴,可实现三维空间运动和两个旋转轴的联动。
五轴联动数控机床根据主轴和旋转轴的不同配置,可分为多种类型,如双主轴头型、双主轴型、单主轴头型等。
定义和类型五轴联动数控机床起源于20世纪70年代,最初是为了解决航空发动机叶轮的加工难题而研发的。
随着计算机技术和数控技术的不断发展,五轴联动数控机床的技术水平得到了不断提高和应用领域的不断扩展。
历史和发展五轴联动数控机床适用于加工具有复杂几何形状和特殊要求的零件,如航空发动机涡轮叶片、船用螺旋桨等。
五轴联动数控机床具有高精度、高效率、高可靠性、低能耗等优势,可实现复杂零件的一次装夹加工完成,提高生产效率和加工质量。
五轴联动数控机床可进行非球面、自由曲面、多面体等复杂零件的高精度加工,也可实现多种特殊工艺的加工,如高速切削、干切削等。
适用范围和优势02工作原理1结构特点23五轴联动数控机床采用旋转轴结构,包括X、Y、Z三个线性轴和A、B两个旋转轴。
旋转轴结构机床内部采用高精度齿轮,保证了旋转轴的传动精度和稳定性。
高精度齿轮各轴之间通过同步轴实现联动,确保各轴运动的协调性和准确性。
同步轴数控系统五轴联动数控机床的数控系统是核心,它可以接受来自计算机或其他控制设备的指令,并将其转换为机床各轴的运动。
数据处理数控系统根据加工零件的几何形状和加工要求,计算出各轴的运动轨迹和联动关系,实现五轴联动。
运动控制数控系统将计算出的运动轨迹和联动关系转换为机床各轴的进给量和进给速度,通过伺服控制系统控制机床各轴的运动。
位置控制01五轴联动数控机床的位置控制系统采用闭环控制,通过编码器反馈机床各轴的实际位置,与指令位置进行比较,调整各轴的运动轨迹。
速度控制02机床各轴的进给速度通过速度控制环进行控制,数控系统将进给速度转换为机床各轴的转速,通过伺服电机进行控制。
现代数控技术课件专题六 五轴联动数控系统的理论和技术

一、五轴联动数控加工介绍
提高加工质量
❖ 稳定加工精度 ❖ 提高表面平滑 ❖ 缩短刀具长度
五轴
三轴
五轴联动数控系统的理论和技术
12 2020/8/19
一、五轴联动数控加工介绍
降低成本
❖ 延长刀具寿命 ❖ 减少加工设备 ❖ 提高效率 ❖ 减少工装和刀具
五轴联动数控系统的理论和技术
13 2020/8/19
9 2020/8/19
一、五轴联动数控加工介绍
• 缩短加工时间 • 提高加工质量 • 降低加工成本 • 加工复杂零件
五轴联动数控系统的理论和技术
10 2020/8/19
一、五轴联动数控加工介绍
缩短加工时间
❖ 减少工件装卡次数 ❖ 提高材料的去除率
五轴联动数控系统的理论和技术
11 2020/8/19
一次装夹
通过规划刀具方向可以高效的刀具加工复杂曲面零件,减少 装夹次数,提高加工效率
五轴联动数控系统的理论和技术
6 2020/8/19
一、五轴联动数控加工介绍
• 改变刀具方向带来的优势
复杂工件 刀具长度 加工效率
工艺性能
刀具方向影响切削力的大小
控制切削区域
通过调整刀具方向可以使球头铣刀用合理的区域参与切削, 降低切削力和刀具磨损,提高加工表面质量
五轴联动数控系统的理论和技术
7 2020/8/19
一、五轴联动数控加工介绍
汽车(汽油机)涡轮增压器叶轮
长征系列火箭发动机叶轮
直11用Honeywell公司的 航空涡轴发动机
船舶(柴油机)涡轮增压器叶轮
五轴联动数控系统的理论和技术
8 2020/8/19
一、五轴联动数控加工介绍
五轴联动数控机床旋转轴中心坐标的自动测量程序设计

量次数 n < 10, 否则停止测量, 给出错误报警。流程图
如图 4所示。
( 下转第 79页 )
2010年第 4期
片的轮廓。调用 sobel算子: [ g, t] = edge( ,f sobe l ) 其 中 f 为输入的刀具图像, g 为输出的逻辑类图像, 它在检 测到的边缘时显示为 1其它位置为 0。 t 为系统自动返 回的阈值。这个阈值为初始值。得到单张照片的刀具 轮廓如图 3所示。
收稿日期: 2009- 10 - 26 作者简介: 李光友 ( 1978 ), 男, 山东定陶人, 大连大森数控技术发展中心有限公司, 5轴项目担当, 硕士, ( E- m ail) liguangyou201@ s ina. com。
! 75!
! 控制与检测 !
组合机床与自动化加工技术
P2: 测量方向向量, 比如, 如果测量方向为 Z 轴负 方向, 则使用 ( 0, 0, - 1)。
( 上接第 76页 )
图 4 所有照片叠加后得到的刀具实际轮廓
[参考文 献 ] [ 1] 杨勇生. 数控加工编程中刀具干涉的研究现状及存 在问题
[ J]. 计算机辅助工程, 1999( 4): 41- 47. [ 2] 李 壮, 汪 文 彬, 李 应 勇. 基 于 M ATLA B 的 图 像 压 缩 处 理
由于测量头距离 B 轴旋转中心有一个固定长度的 旋转半径 R, 所以要实现自动测量必须对 B 轴由于旋转 而造成的测量头偏移进行补偿, 测量分如下 2个过程:
( 1)初步计算出 B 轴的旋转中心和旋转半径。 如图所示, B 轴旋转一个小角度, 由旋转造成的偏 差也比较小, 利用这个特点, 对 B 轴在 B = 0∃, B = 1∃, B = 2∃分别进行 测量, 使用 宏指令 P rbSphere 可以测 出 P 0, P 1, P 2三点坐标矢量。根据宏指令 GetCentO ri( P0 P1 P2 R Pbd) 计算出 B 轴旋转中心坐标矢量 Pb、旋转 半径 R 和旋转轴心方向矢量 P bd。 ( 2)逐 步对 B 轴的 旋转 中心和 旋转半 径进行 校 正。 根据步骤 1中的 B 轴旋转中心坐标矢量 P b 和旋 转半径 R, 对 X 轴和 Z 轴进行补偿移动 ( Y 轴偏移量很 小, 不用补偿 ), 补偿公式如下:
五轴说明书(编程部分)
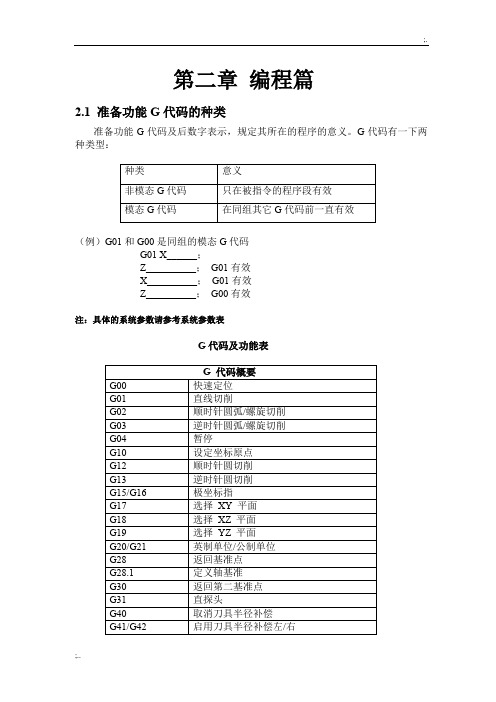
第二章编程篇2.1 准备功能G代码的种类准备功能G代码及后数字表示,规定其所在的程序的意义。
G代码有一下两种类型:(例)G01和G00是同组的模态G代码G01 X______;Z__________;G01有效X__________;G01有效Z__________;G00有效注:具体的系统参数请参考系统参数表G代码及功能表U、V、W分别和A、B、C 同义,同时使用A 和U 或B 和V 等会产生错误(也就是一行中用了两次A)。
在U、V、W 代码的描述中没有指定它们在同一程序行使用的次数,但A、B、C 代码的描述决定了他们只能使用一次。
2.1.1快速直线移动- G00(1)对于快速直线移动,程序G00 X__ Y__ Z__ A__ C__ 中的所有功能字,除了至少选用其中的一个外其它都为可选,如果当前移动模式为G00那么G00也是可选的,刀具可以以协调线性移动的方式以最大进给到达目的点,执行G00命令不会有切削动作发生。
(2)如果执行了G16命令设置了极坐标原点,在极坐标中使用半径和角度表示目的地,也可以使用G00 X__ Y__控制快速直线移动,X__是目的地相对于极坐标原点的半径,Y__则是目的地与极坐标原点连线与3点钟方向逆时针方向的夹角(也就是通常用的四象限标准)。
执行G16 时的当前点坐标就是极坐标原点。
如果在程序中省略了所有的轴功能字将会产生错误。
如果启用了刀具半径补偿,刀具的移动将与上面所描述的不同(见刀具补偿)。
如果程序在同一行有G53 命令,刀具的移动也同与上述不同(见绝对坐标系)。
2.1.2 以进给直线切削– G01(1)对于以进给直线切削来说,程序G01 X__ Y__ Z__ A__ C__中的所有功能字,除了必须至少使用的之外其它的轴功能字都为可选。
如果当前移动模式为G01,那么G01也是可选的,刀具将以协调线形移动的方式以当前进给移动到目的地。
(2)如果执行了G16命令设置了极坐标原点,在极坐标中使用半径和角度表示目的地,也可以使用G00 X__ Y__控制快速直线移动,X__是目的地相对于极坐标原点的半径,Y__则是目的地与极坐标原点连线与3点钟方向逆时针方向的夹角(也就是通常用的四象限标准)。
五轴机床检测方法

五轴铣床检测方法五轴铣床一般是比三轴铣床多两个旋转轴。
首先,要对三个直线轴进行检测;其次,是针对两个旋转轴的检测;最后,要对五轴联动性能进行检测。
一三个直线轴的检测方法和三轴铣床一样,所以这里不做叙述。
二两个旋转轴的检测因为旋转轴的各项精度对五轴加工精度的影响远远大于三个直线轴精度的影响,所以对五轴铣床的检测重点是两个旋转轴的精度。
旋转轴的精度包括两个方面:一方面是旋转轴运动的精度,主要要检测每个旋转轴的重复定位精度;另一方面是两个旋转轴相互之间的关系,主要检测两个旋转轴轴线和主轴轴线之间空间几何关系是否正确。
(一)测量旋转轴的重复定位精度方法和直线轴测量方法类似:对于转台类型的旋转轴,在转台上固定一个方块,用千分表接触方块的表面,旋转转台一定角度,再反向旋转转台同样多角度,回到原位,观察两次表针接触方块表面时的表读数是否一致,误差多少(如图1);对于摆头类型的旋转轴,在主轴上装上检测用芯棒,用千分表指针接触芯棒来检测(如图2)。
图1 测量转台的重复定位精度图2 测量摆头的重复定位精度(二) 测定两个旋转轴和主轴之间的空间几何关系这项需要按照五轴铣床的类型分为三种情况:1 双转台结构的五轴铣床图3为一个双转台结构的示意图,在图中标出了两个旋转轴的轴线,这两根轴线应该如图中那样相交于一点。
如果这两个旋转轴的轴线不相交,则要测定出两个轴线的偏心距离。
图3 双转台结构示意图测定方法如下:先将C 轴转台校正,使C 轴转台平行于XY 平面(方法略);再如图4所示,分别旋转B 轴+90°和-90°,测量两个方位下B 轴转台侧面最高点的高度差。
如果高差为零,则双转台的空间几何关系符合理想情况,如果高差不为零,则B 、C 轴的偏心量为此高差的二分之一。
C 轴轴线 B 轴轴线转台最高点转台最高点图4 双转台轴线偏心量测定3 转台和单摆头结构的五轴铣床图5为单摆头结构的示意图,图中标出了B轴的轴线和主轴的轴线,这两个轴线应该相交于一点,如果它们不相交,需要测定出它们的距离,即主轴和摆动轴B轴的偏心量。
单转台单摆头五轴机床工件坐标系建立及编程
单转台单摆头五轴机床工件坐标系建立及编程摘要:以单转台单摆头五轴联动数控机床为例,详细介绍了五轴机床工件坐标系的建立过程,尤其针对五轴机床转台旋转中心的确定及主轴刀具摆长的测定、计算及输入进行了详细讲解,并且以SKY五轴机床为例介绍了多轴编程的基本格式。
关键词:单转台单摆头;工件坐标系;编程引言五轴机床一般为在普通三轴机床的基础上附加了两个旋转轴。
又称为3+2轴。
按照旋转轴的类型,五轴机床可以分为三类:双转台五轴、双摆头五轴、单转台单摆头五轴。
旋转轴分为两种:使主轴方向旋转的旋转轴称为摆头,使装夹工件的工作台旋转的旋转轴称为转台。
单转台单摆头五轴机床以旋转轴B为摆头,旋转平面为ZX平面;旋转轴C为转台,旋转平面为XY平面。
其特点为:加工过程中工作台只旋转不摆动,主轴只在一个旋转平面内摆动,加工特点介于双转台和双摆头之间,其旋转轴结构如图1所示。
图1 单转台单摆头五轴机床机构工件坐标系的建立就是将CAM软件的三维图形中的加工坐标系与实际机床上的加工坐标系统一起来。
工件原点(加工坐标系原点)位置是由编程人员设定的。
机床上工件的原点反映的是工件与机床原点之间的位置关系。
工件原点一旦确定一般不再改变。
而转台加摆头的五轴机床在装夹工件之前要先测出转台中心,装夹工件时校正工件或测量出工件位置偏差,还要测定摆轴的有效摆长,有效摆长等于摆轴长加基准刀具长度之和。
1 建立工件坐标系单转台单摆头五轴机床,一般将加工原点取在旋转工作台(C轴)的旋转轴线上,因此对刀时必须找到转台的中心,加工原点的X、Y轴坐标由转台中心位置确定,但Z轴坐标根据工件上的基准而定,与转台中心无关。
1.1 校正摆轴,使主轴垂直于工作台(对刀B轴原点)方法一:如图2所示,在主轴上装一标准芯棒(或刀杆);移动B轴,使主轴大概垂直于工作台平面;将千分表吸在工作台面上,调整表针位置,让表针接触刀杆或芯棒;低速转动主轴,或用手拨动刀杆或芯棒使主轴转动,若千分表读数随主轴旋转而变化,则重新安装芯棒,直至千分表读数不随主轴转动而变化或读数在允许的范围之内;上下运动Z轴,观察千分表读数变化,调整B轴,使千分表读数不随Z轴上下移动而变化或其变化在允许的范围之内,此时主轴与工作台垂直。
高精度五轴联动数控设备回转中心与主轴端面距离的意义及测量方式
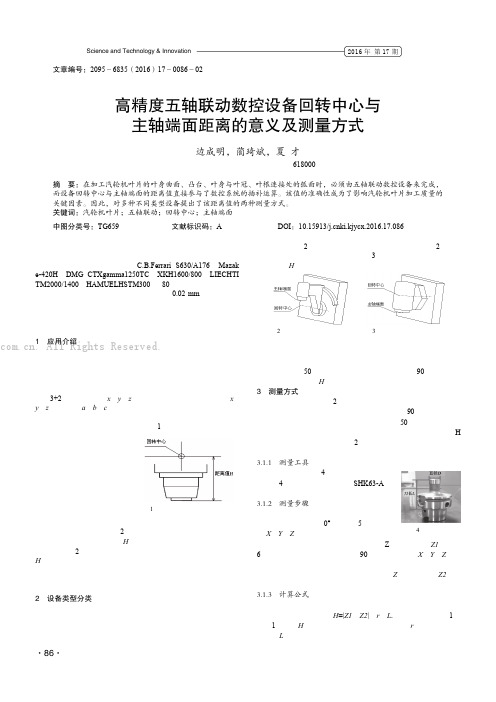
科技与创新┃Science and Technology & Innovation·86·文章编号:2095-6835(2016)17-0086-02高精度五轴联动数控设备回转中心与 主轴端面距离的意义及测量方式边成明,蔺琦斌,夏 才(东方汽轮机有限公司,四川 德阳 618000)摘 要:在加工汽轮机叶片的叶身曲面、凸台、叶身与叶冠、叶根连接处的弧面时,必须由五轴联动数控设备来完成,而设备回转中心与主轴端面的距离值直接参与了数控系统的插补运算。
该值的准确性成为了影响汽轮机叶片加工质量的关键因素。
因此,对多种不同类型设备提出了该距离值的两种测量方式。
关键词:汽轮机叶片;五轴联动;回转中心;主轴端面中图分类号:TG659 文献标识码:A DOI :10.15913/ki.kjycx.2016.17.086众所周知,叶片是汽轮机的心脏,其复杂的曲面造型必然会成为加工中的重点和难点。
我公司现有多种类型的高精度五轴联动数控加工中心,包括 C.B.Ferrari S630/A176、Mazak e-420H 、DMG CTXgamma1250TC 、XKH1600/800、LIECHTI TM2000/1400、HAMUELHSTM300等80余台设备。
叶片的加工精度要求非常高,有些公差要求甚至在0.02 mm 内,因此,设备回转中心与主轴端面距离值的准确性显得尤为重要。
由于该数值直接影响了系统插补运算的准确性,根据多年对五轴联动设备的使用、加工经验,本文首先介绍了该距离值的应用意义,并对不同类型的设备提出了不同的测量解决方案。
1 应用介绍1.1 五轴联动设备结构五轴联动加工中心有高效率、高精度的特点,工件一次装夹就可完成多面体的加工,它可以使刀具与加工零件实现五轴联动,从而使刀具的切削刃部分始终沿着所需加工曲面的切面方向移动,使曲面加工达到理想的切削状态。
五轴联动加工中心大多为“3+2”的结构,即x ,y ,z 三条直线运动轴加上分别围绕x ,y ,z 轴旋转的a ,b ,c 三个旋转轴中的两个旋转轴组成。
旋转轴中心测量方法和5轴功能参数设定ppt课件
a61-5X R
0 -730
0 -350
0 ±365 0~-650 0~-730 -60~+150
360 80~730 70~800
380
a71-5X R
0 -810
0 -430
0 ±365 0~-730 0~-800 -60~+150
360 80~810 50~850
380
a81-5X R
0 -1070
MAKINO 参数; B轴和C轴的中心距
B轴中心位置与C轴中心位置
B轴 90° 旋转
C 轴中 心
B 轴中心
B轴 90° 旋转
C 轴中 心
B 中心
C 轴中心低于B轴中心
C 轴中心高于B 轴中心
Fanuc→N19703=负 “a”
Fanuc→N19703=正 “a”
Makino panel→正 “a”
Makino panel→正 “a”
② ①
Movement Movement/2 Movement/2
①
Y ②
Z
X
X
9
Ⅱ‐4 测量距离 ( C 对 标准面)
通过千分表测量标准面, 再计算误差值.
Z X
β
磁力块.
标准面到C中心距
γ
β
计算C中心到标准面的公差范围. Γ= (C中心距)-β
10
Ⅱ‐5 测量 X2 值
测量X 机械原始位置 到 B90 接触面位置距离. X2 = (X 机械坐标值) – (β)
24
Table
D500
+ Y-Stroke
A-axis 30deg.~-120deg.
Z-Stroke
五轴联动数控加工中旋转角度的选取与优化_吴宝利

48 2013 / 9
轴 的 极 限 角 速 度 相 等 ,不 考 虑 线 性 轴 ,假 设 A、C 都 以
极限速度进行插补,A、C 中变化较大的轴的插补时间,
即为整个过程的插补时间。 最优化目标是使两个坐标
点 之 间 ,效 率 最 高 ,故 取 A、C 变 化 较 大 的 作 为 优 化 的
轴的最小极限值和最大极限值。 角度选取的流程如图
3 所示。
3 角度的优化
读取一组刀位点
刀具的中心 轨迹是依照工件 的轮廓形状而生 成的, 在五轴加 工的零件中,常常 会碰到自由曲面 形状复杂的案例。 在这些零件的某 些高曲率的地方, 会出现刀位点间 的法向矢量的变 化幅度和变化频 率比较大的情况。 这样会大大降低 零件的加工精度, 尤其是五轴侧刃 铣,很容易产生较 大的过切。 刀位 点间的法向矢量 变化幅度和变化
刀位点间的法向矢量变化幅度和变化读取一组刀位点计算得到ac角度基值约束条件是否存在ac可能取值读一组可能ac值计算目标函数值将其存入数组ac可能值读取完毕选取得到使目标函数值最小的ac值刀位文件结束结束无解报警处理nynynyijk图3角度选取流程图制造材料制造材料auiijkc图2刀具从初始点绕xz轴的逆时针方向到达目的点48机械制造51卷第589期20139频率较大反映到nc加工代码中就是旋转角度变化较大
* 广州市科技计划项目(编号:2009Z2-D351) 收稿日期:2013 年 3 月
NC 代 码 进 行 插 值 处 理 ,以 提 高 零 件 的 加 工 精 度 ,并 通 过 VERICUT 仿真软件进行仿真和实际加工实验,验证 角度选取与优化的合理性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中 图分 类号 :H1 ;G 5 T 6T 6
文献 标识 码 : A
Dein o sg f Aut m a i e u i o r m or Ro ar x s S Ce t r o tc M as rng Pr g a f t y A i ’ n e C 0 r n tO n 5 Axe a hi e To l 0 di a i n i sM c n o L a gy u IGu n - o
( ai ae CT cn l yd vl m n C ne O , T D l n Lann 10 3 hn ) D l nD snN eh oo e e p e t e t C . L D, a a i ig1 6 2 ,C ia a g o r i o
Absr c :Th o a y a i S c n e ta t e r tr xs’ e tr mus e m e s e f r h tb a urd beo e t e RTCP f nci n i s d i x s i tr l- u to S u e n 5 a e epoa n to a h e t o .Thea t m a i e s rn eho o a y a i ’ e t ri e e t d c n i e ig t s d inm c i o 1 n u o tc m a u ig m t d ofr tr xs S c n e spr s n e o sd r hedia - n va t g fm a u lm e s rn n a e o n a a u ig.The pr ga f a o a i e s r g i e in d a d t e fo c at i h wn. o rm o ut m tc m a u i s d sg e n n h lw h r s s o
21 年第4 00 期
文章 编 号 :0 1 2 5 2 1 ) 4—0 7 O 1 0 —2 6 ( 0 0 0 0 5一 2
・ 制 与检 测 ・ 控
五轴联动数控机床旋转轴 中心坐标的 自动测 量 程 序 设 计
李光 友
( 大连 大森 数控技 术发 展 中心有 限公 司 , 宁 大连 16 2 ) 辽 10 3
直线轴 和两个 旋转 轴 … 。旋转 轴轴 心 坐标 对数 控 系 统 来 说是 非常 重要 的数据 , 特别 在 五轴 联 动机 床 中 , 要实 现 R C ( o t nt l et on) 能 和刀具 补 偿功 T P R t i o C nr p it功 ao o e 能, 系统需 要输 入旋 转轴 的 中心坐 标 和旋 转半 径 , 否 则 RC T P功 能原 理 不 能 实 现 , 工 的 刀 具 轨 迹 必 定 是 加
acrt y g eted et nv c r f oayai’cne, hc a eu e oajs tei tlp eio f cua l , i i ci et t xs et w i C b sdt dut h sa rc i o e v h r o oor r r h n n l sn
摘要 : 量 旋转轴 中心是五 轴联 动机床 的 R C 测 T P功 能 实 现 的 前 提 条 件 , 合 手 动 测 量 不 方 便 的 缺 点 , 出 结 提
了 自动测 量旋转 轴 中心的 测量 方法 , 计 出 自动 测量 程 序 并 给 出程 序 流 程 图 , 设 实验 表 明 : 程序 能精 确 该 地测 量旋转 轴 中心 坐标 矢量 , 给 出旋转轴 轴 心方 向向量 用 于调 整机 床安 装精度 。 并
m a h e t o1 c i o . n K e o ds:r t r xs u o a i e s r g o r na e v c o yw r o ay a ;a t m tc m a u i ;c o di t e t r i n
O 引言
D S N1 A E .8数控 系 统是 大 连 大 森 公 司开 发 的 高 档 五轴联 动数 控 系统 。五轴联 动 数控 机床 一 般具 有 三个
错误 的 。
本 文将 根 据 D S N.8数 控 系 统 的 特 点 , 计 一 AE 1 设
个 全 自动的旋 转 轴 轴 心 坐标 的测 量 程 序 , 程 序 能 自 该
动测 量 出旋转 轴 轴 心 坐标 矢 量 , 能 给 出旋 转 轴 轴 心 并 方 向矢量 , 而计 算 出 旋 转 轴 轴 心 与对 应 直 线 轴 的 机 从
Th o a a e rfe y e pe i e t e pr g m h sbe n ve i d b x rm n .Thepr g a a u pu h o r ia eve t o ay a i r i o m c n o t tt e c o d t coroft r t r xs r n he
械夹 角 , 整机 床 以提高机 床 的安装 精度 。 调
1 系统 指 令 和 控 系统 具 有 丰 富 的宏 指令 供 用户 使 用 , 面介 绍 本 文 设 计 的测 量 程 序 中用 到 的宏 指 下
令 :
以前 的测量 方法 一般采 用 手 动测 量 。稍微 好 一 点 的方法 是手 动移 动 机 床 到 待 测 点 , 用 数 控 系 统 的 跳 使