16.2坐标轴旋转
《旋转作图与坐标系中的旋转变换》PPT课件 人教版九年级数学上册

转后点D与点 B 重合.
设点E的对应点为点E'. 因为旋转后的图形与旋转前的
图形全等,所以∠ABE'=∠ADE=90°,BE'=DE.
因此,在CB的延长线上取点E',使BE'=DE,则
△ABE'为旋转后的图形.
A
D
A
D
E
E
B
C
E′ B
C
E点的对应点E′,还可以用其他方法确定吗?
方法一:由∠EAE′=90°,
知识点一 用旋转的知识作图
例 如图,E是正方形ABCD中CD边上任意
一点,以点A为中心,把△ADE顺时针旋转90°,
画出旋转后的图形.
A
D
想一想:本题中作图
E
的关键是什么?
确定点E的对应点E' B
C
解:因为点A是旋转中心,所以它的对应点是 点A .
正方形ABCD中,AD=AB,∠DAB=90°,所以旋
旋转180° 后的图形 如图所示.
A'
A
B
4. 如图,△ABC中,∠C=90°. (1)将△ABC绕点B逆时针旋转 B
90°,画出旋转后的三角形;
(2)若BC=3,AC=4,点A旋转后
的对应点为A,求A'A的长.
C
A
【教材P63习题23.1 第9题】
解:(1)△A'BC'即为所求.
(2)∵△ABC中,∠C=90°,BC=3,AC=4.
R·九年级上册
23.1 图形的旋转
第2课时 旋转作图与 坐标系中的旋转变换
复习回顾
定义
在一个平面图形绕平面内某一点O转动 一个角度,叫做图形的旋转.
坐标旋转变换
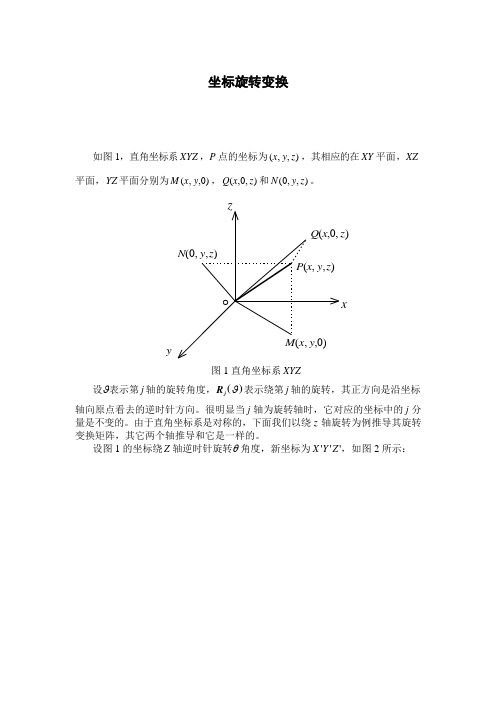
Q (x ,0, N (0, y , z )P (x , y , z )OM (x , y ,0)坐标旋转变换如图 1,直角坐标系 XYZ ,P 点的坐标为 (x , y , z ) ,其相应的在 XY 平面,XZ 平面, Y Z 平面分别为 M (x , y ,0) , Q (x ,0, z ) 和 N (0, y , z ) 。
zz )xy图 1 直角坐标系 XYZ设ϑ表示第 j 轴的旋转角度, R j (ϑ ) 表示绕第 j 轴的旋转,其正方向是沿坐标 轴向原点看去的逆时针方向。
很明显当 j 轴为旋转轴时,它对应的坐标中的 j 分量是不变的。
由于直角坐标系是对称的,下面我们以绕 z 轴旋转为例推导其旋转 变换矩阵,其它两个轴推导和它是一样的。
设图 1 的坐标绕 Z 轴逆时针旋转θ 角度,新坐标为 X 'Y ' Z ',如图 2 所示:θZ (Z ')N (0, y , z ) | (0, y ', z ') Q (x ,0, z ) | (x ',0, z ')P (x , y , z ) | (x ', y ', z ')X 'OXθM (x , y ,0) | (x ', y ',0)YY '图 2 坐标绕 Z 轴逆时针旋转θ 角度由于坐标中的 z 分量不变,我们可以简化地在 XY 平面进行分分析,如图 3 所示:YY 'M (x , y ,0) | (x ', y ',0)θ ϕXOθX M X 'X '图 3 坐标绕 Z 轴逆时针旋转θ 角度的 XY 平面示意图点 M X 和点 M X ' 分别是 M 点在 X 轴和 X ' 轴的投影。
如图 3♣x = OM X ♦♥ y = MM X = OM cos ∠MOM X = OM sin ∠MOM X = OM cos(ϕ - θ )= OM sin(ϕ - θ )♣x ' = OM X ' = OM cos ∠MOM X ' = OM cos ϕ ♦♥ y = MM X ' = OM sin ∠MOM X ' = OM sin ϕ把(1)式按照三角函数展开得:♣x = OM cos ϕ cos θ + OM sin ϕ sin θ ♦♥ y = OM sin ϕ cos θ - OM cos ϕ sin θ把(2)式代入(3)式得:M♠♣x = x 'cos θ + y 'sin θ ♦♥ y = -x 'sin θ + y 'cos θ坐标中的 z 分量不变,即 z = z ' 这样整个三维坐标变换就可以写成(用新坐标表 示就坐标):♣x = x 'cos θ + y 'sin θ ♠♦ y = -x 'sin θ + y 'cos θ ♥z = z ' 把式(5)用一个坐标旋转变换矩阵 R Z (θ) 表示可以写成:ϒ x / ϒx '/ ' ∞ ' ∞' y ∞ = R Z (θ)' y '∞ '≤ z ∞ƒ '≤z '∞ƒ ϒcos θ 'sin θ 0/ ∞ R Z (θ) = '- sin θcos θ 0∞ ≤' 01∞ƒ坐标系 X 'Y ' Z ' 是坐标系 XYZ 绕 Z 轴逆时针旋转θ 角度而来,从另一个角度来看,也可以说坐标系 XYZ 是坐标系 X 'Y ' Z ' 绕 Z ' 轴逆时针旋转 - θ 角度而来,所以 根据(6)式有(上标 "-1" 表示矩阵的逆):ϒ x '/ ϒ x / ' ∞ ' ∞ -1' y '∞ = R Z (- θ)' y ∞ ⇒ R Z (θ) = R Z (- θ) '≤ z ' ∞ƒ '≤ z ∞ƒ用同样的分析办法,当绕 X 轴逆时针旋转θ 角度其 Y Z 平面分析如图 4 所示:ZZ 'N (x ,0, z ) | (x ',0, z ')θ ϕYOθYN Y 'Y '图 4 坐标绕 X 轴逆时针旋转θ 角度的 Y Z 平面示意图 其坐标转换关系为:N♠X 'X ♠ Y ∞ ♣ y = y 'cos θ + z 'sin θ ♠♦z = - y 'sin θ + z 'cos θ ♥x = x '(9)ϒ1R (θ) = '0 0 cos θ 0/ sin θ ∞(10)'≤0- sin θcos θ ∞ƒR -1 (θ)= R (- θ) (11)当绕 Y 轴逆时针旋转θ 角度得其 XZ 平面分析如图 5 所示(注意和前面两个角度方向不一样):Z 'ZQ (0, y , z ) | (0, y ', z ')θϕ θOQ XX 'Q X 'X图 5 坐标绕 Y 轴逆时针旋转θ 角度的 XZ 平面示意图 ♣x = x 'cos θ - z 'sin θ♠♦z = x 'sin θ + z 'cos θ ♥y = y '(12)ϒcos θ '0 - s in θ /∞ R Y (θ) = '01 0 ∞ (13)'≤sin θcos θ ∞ƒR -1(θ)= R (- θ) (14)X Y。
坐标系旋转指令的应用

对指令,在
G68后面指定 旋转中心
;
坐标系旋转建立指令
坐标系旋转方式的程序段
坐标系旋转取消指令
G17
Y
X
旋转后的坐标系统
旋转的角度
+X
旋转的角度
G18 Z
旋转后的坐标系统
+Z
旋转的角度
G19 旋转后的坐标系统 +Y
指令使用注意事项
4.坐标系旋转取消指令G69以后第一个移动 指令必须用绝对值指定。
G90---正确执行
G91---不正确执行, 以当前位置为中心旋转
指令使用注意事项
5.在同时使用镜像、缩放及旋转时应注意:CNC的数据处理顺序是从程序镜 像到比例缩放和坐标旋转,再到刀具半径补偿,应按该顺序指定指令;取消 时,按相反顺序。
O0440
G54G90G94G17G40G21G49
M03S1000
G00X0Y0 M98P0441
段号1 凹槽轨迹加工程序
N10 O0441
GM6988XP00Y4401R120;NN23002
G00X28.147Y-16.251 G00G43Z50H01;
G69;
N40 G00Z5
GM6988XP00Y4401R240;NN56003
镜像
比例缩放 坐标旋转
刀具补 偿
6.如果在镜像指令中有坐标旋转指令,则坐标系旋转方向相反,即顺 时针变成逆时针,逆时针变成顺时针。
7.如果在坐标旋转指令前有比例缩放指令,则坐标系旋转中心也被缩 放,但旋转角度不被比例缩放。
指令应用案例
段号 坐标系旋转主程序
N10 N20 N30 N40 N50 N60 N70 N80 N90 N100 N110 N120
坐标轴旋转公式

坐标轴旋转公式
坐标轴旋转是指把原坐标系的坐标轴旋转到新的坐标系的过程。
它包括两个步骤:一是把坐标轴旋转到新的坐标系,二是把原坐标系中的点经过坐标轴旋转后在旋转后坐标系中的坐标。
旋转坐标轴的公式是:
原坐标点(x,y)旋转θ弧度后的坐标为:
新坐标点(x′,y′)=(x cosθ±y sinθ, x sinθ±y cosθ)。
其中,把坐标轴旋转θ后,新坐标点(x′,y′)表示旋转后坐标系中的点坐标,而原坐标点(x,y)表示旋转后坐标系中的点坐标。
公式的正负号表示旋转的方向,当正号时,表示顺时针旋转;当负号时,表示逆时针旋转。
这个公式可以应用于二维的坐标轴旋转,学习者也可以利用公式,结合线程旋转的公式,来旋转三维坐标系的坐标轴。
旋转轴和旋转角计算公式
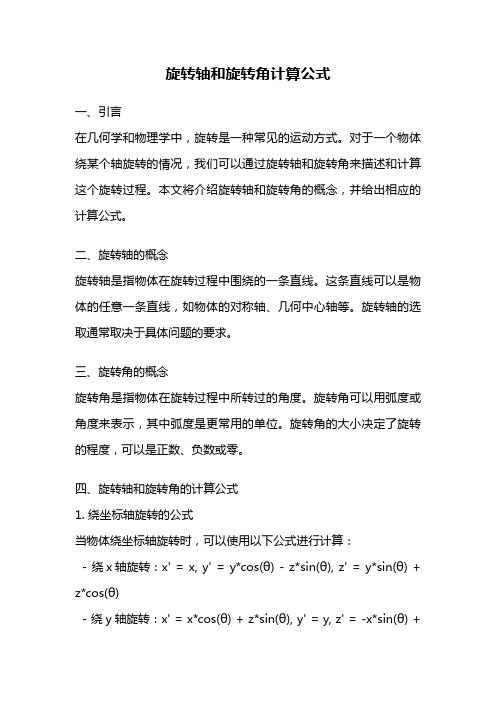
旋转轴和旋转角计算公式一、引言在几何学和物理学中,旋转是一种常见的运动方式。
对于一个物体绕某个轴旋转的情况,我们可以通过旋转轴和旋转角来描述和计算这个旋转过程。
本文将介绍旋转轴和旋转角的概念,并给出相应的计算公式。
二、旋转轴的概念旋转轴是指物体在旋转过程中围绕的一条直线。
这条直线可以是物体的任意一条直线,如物体的对称轴、几何中心轴等。
旋转轴的选取通常取决于具体问题的要求。
三、旋转角的概念旋转角是指物体在旋转过程中所转过的角度。
旋转角可以用弧度或角度来表示,其中弧度是更常用的单位。
旋转角的大小决定了旋转的程度,可以是正数、负数或零。
四、旋转轴和旋转角的计算公式1. 绕坐标轴旋转的公式当物体绕坐标轴旋转时,可以使用以下公式进行计算:- 绕x轴旋转:x' = x, y' = y*cos(θ) - z*sin(θ), z' = y*sin(θ) + z*cos(θ)- 绕y轴旋转:x' = x*cos(θ) + z*sin(θ), y' = y, z' = -x*sin(θ) +z*cos(θ)- 绕z轴旋转:x' = x*cos(θ) - y*sin(θ), y' = x*sin(θ) + y*cos(θ), z' = z2. 绕任意轴旋转的公式当物体绕任意轴旋转时,可以使用四元数表示旋转,并通过以下公式进行计算:- 旋转后的位置:P' = Q * P * Q^-1- 其中,P为原始位置向量,P'为旋转后的位置向量,Q为旋转四元数,Q^-1为Q的逆四元数。
五、旋转轴和旋转角的应用旋转轴和旋转角的概念和计算公式在许多领域都有广泛的应用,以下列举几个例子:1. 三维计算机图形学中,旋转轴和旋转角用于描述物体的旋转变换,从而实现物体的旋转效果。
2. 机器人学中,旋转轴和旋转角用于描述机械臂的旋转关节,以实现机械臂的运动和灵活性。
九年级数学上册教学课件《旋转作图与坐标系中的旋转变换》
旋转中心 旋转方向 旋转角
顺时针 逆时针
课后作业
1.从课后习题中选取; 2.完成练习册本课时的习题.
01
找
找出旋转中心、旋转方向、旋转角以 及表示图形的关键点(如顶点)
02 连 连接图形的每一个关键点与旋转中心
03
转
把连线绕旋转中心按旋转方向旋转相 同的角度(旋转角的度数)
举例: 画出旋 转后的 三角形.
04
截
在旋转后所得的射线上截取与关键点到旋转中 心距离相等的线段,得到各关键点的对应点
05
作
按原图顺次连接各关键点的对应点,并标上 相应字母,写出结论
知识点一 用旋转的知识作图
例 如图,E是正方形ABCD中CD边上任意
一点,以点A为中心,把△ADE顺时针旋转90°,
画出旋转后的图形.
A
D
想一想:本题中作图
E
的关键是什么?
确定点E的对应点E' B
C
解:因为点A是旋转中心,所以它的对应点是 点A .
正方形ABCD中,AD=AB,∠DAB=90°,所以旋
逆时针旋转,画出旋转后的图形.【教材P62习题23.1 第3题】
A
A
P'
BP
C
BP
C
解:如图所示,△ACP'即为所求作的图形.
3. 分别画出△ABC绕点O逆时针旋转90°和
180°后的图形. 【教材P62习题23.1 第4题】
B'' A''
解: 旋转90° 后的图形 如图所示.
C' C''
OC
B'
转后点D与点 B 重合.
设点E的对应点为点E'. 因为旋转后的图形与旋转前的
小专题(四):平面直角坐标系中图形旋转的变换规则
小专题(四):平面直角坐标系中图形旋转的变换规则1. 引言平面直角坐标系中,图形的旋转是一种常见的几何变换。
本文介绍了图形旋转的变换规则。
2. 图形旋转的基本概念图形旋转是指将一个图形绕一个中心点旋转一定角度后得到新的图形。
旋转的中心点可以位于坐标原点或任意其他点。
3. 旋转变换的规则根据旋转变换的规则,对于同一图形的旋转变换,可以得到以下规律:- 旋转360度(或2π弧度)等于恢复原状,即旋转后的图形与原图形完全相同。
- 旋转180度(或π弧度)等于将图形沿旋转中心点对称。
- 旋转90度(或π/2弧度)等于将图形逆时针旋转90度。
- 旋转270度(或3π/2弧度)等于将图形顺时针旋转90度。
4. 旋转的计算方法为了进行图形的旋转变换,可以利用旋转矩阵进行计算。
旋转矩阵是一个二维的矩阵,在平面直角坐标系中描述了图形的旋转变换。
旋转矩阵的公式如下:R = | cosθ -sinθ || sinθ cosθ |其中,θ表示旋转的角度。
5. 应用举例以矩形图形为例,假设原始矩形的坐标为A(x₁, y₁), B(x₂,y₁), C(x₂, y₂), D(x₁, y₂)。
若要将该矩形逆时针旋转90度得到新的矩形A'(x₁', y₁'), B'(x₂', y₁'), C'(x₂', y₂'), D'(x₁', y₂'),可以通过旋转矩阵计算得出新的坐标。
新的坐标计算公式如下:x₁' = x₁ * cos90 - y₁ * sin90y₁' = x₁ * sin90 + y₁ * cos90x₂' = x₂ * cos90 - y₁ * sin90y₂' = x₂ * sin90 + y₁ * cos906. 结论图形在平面直角坐标系中的旋转变换遵循一定的规则和计算方法。
通过理解和应用这些规则和计算方法,我们可以对图形进行准确的旋转变换。
旋转坐标转换公式

旋转坐标转换公式在数学和计算机图形学领域,旋转是一种常见的变换操作。
通过旋转,我们可以改变对象在平面或空间中的位置和方向。
在进行旋转操作时,需要使用旋转矩阵来进行坐标转换。
本文将介绍旋转坐标转换的公式及其应用。
二维空间的旋转坐标转换在二维空间中,我们通常使用逆时针旋转为正方向的方式进行坐标转换。
假设一个点P在二维直角坐标系中的坐标为(x,y),我们希望将这个点绕原点O逆时针旋转θ角度,得到新的坐标P’(x’,y’)。
点P经过旋转之后,新的坐标可以通过以下公式计算得出:x’ = x * cos(θ) - y * sin(θ) y’ = x * sin(θ) + y * cos(θ)其中,θ为旋转角度,cos(θ)和sin(θ)分别代表旋转角度的余弦和正弦值。
三维空间的旋转坐标转换在三维空间中,我们同样使用逆时针旋转为正方向的方式进行坐标转换。
假设一个点P在三维直角坐标系中的坐标为(x,y,z),我们希望将这个点绕坐标轴进行旋转,得到新的坐标P’(x’,y’,z’)。
点P经过旋转之后,新的坐标可以通过旋转矩阵的运算得到:x' = x * cos(θ) - y * sin(θ)y' = x * sin(θ) + y * cos(θ)z' = z其中,θ为旋转角度,cos(θ)和sin(θ)分别代表旋转角度的余弦和正弦值。
旋转坐标转换的应用旋转坐标转换在计算机图形学、游戏开发等领域有着广泛的应用。
通过旋转坐标转换,我们可以实现物体的旋转、变换和动画效果。
在3D建模软件中,旋转坐标转换可以用来控制物体的姿态和方向,使得模型呈现出真实的效果。
此外,旋转坐标转换也可以用于机器人运动学中。
通过旋转坐标转换,我们可以计算机器人的末端执行器在运动时相对于基准坐标系的位置和姿态,从而实现精确的运动控制和轨迹规划。
总的来说,旋转坐标转换是一种重要的数学变换,它不仅可以帮助我们理解物体在空间中的位置和方向变化,还可以应用于各种领域,拓展了数学和计算机科学的应用范围。
坐标变换(旋转)
1、基本指令格式。
2、加工实例。
3、作业。
1、坐标系旋转
对于某些围绕中心旋转得到的特殊的轮廓加工,如 果根据旋转后的实际加工轨迹进行编程,就可能使坐 标计算的工作量大大增加,而通过图形旋转功能,可 以大大简化编程的工件量。 坐标系旋转指令(G68、G69)
1、坐标旋转生效指令 指令格式: G68 X__ Y__ R__ X__ Y__:指定坐标旋转的中心。 R__:旋转角度,旋转角度的零度方向为第一坐 标轴的正方向,逆时针为正。不足1°的角度以小数 点表示,如10°54′用10.9°表示。
2、坐标旋转取Βιβλιοθήκη 指令 指令格式:G69。作业
旋转坐标轴——精选推荐
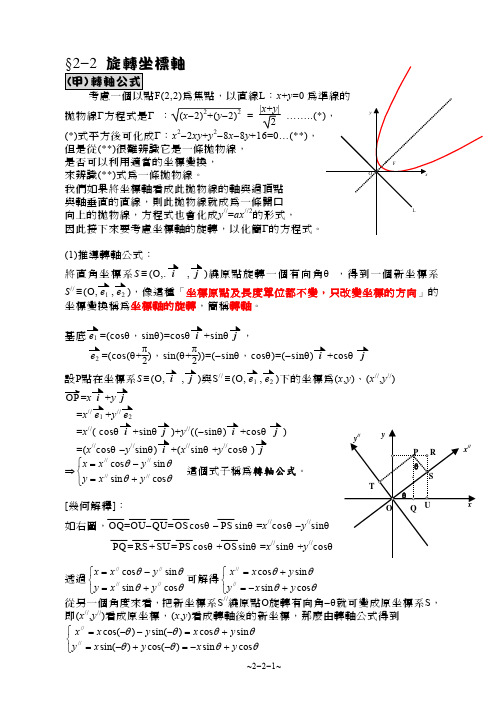
§2−2 旋轉坐標軸(甲)轉軸公式考慮一個以點F(2,2)為焦點,以直線L :x +y =0拋物線Γ方程式是Γ :(x −2)2+(y −2)2 = |x +y |2……..(*)(*)式平方後可化成Γ:x 2−2xy +y 2−8x −8y +16=0…(**), 但是從(**)很難辨識它是一條拋物線, 是否可以利用適當的坐標變換, 來辨識(**)式為一條拋物線。
我們如果將坐標軸看成此拋物線的軸與過頂點 與軸垂直的直線,則此拋物線就成為一條開口 向上的拋物線,方程式也會化成y //=ax //2的形式,因此接下來要考慮坐標軸的旋轉,以化簡Γ的方程式。
(1)推導轉軸公式:將直角坐標系S ≡ )繞原點旋轉一個有向角θ ,得到一個新坐標系S //≡1e 2),像這種「坐標原點及長度單位都不變,只改變坐標的方向」的坐標變換稱為坐標軸的旋轉,簡稱轉軸。
1=(cos θ,sin θ)=cos i +sin j ,e 2=(cos(θ+π2),sin(θ+π2))=(−sin θ,cos θ)=(−sin θi +cos θj 設P 點在坐標系S ≡)與S //≡1e 2)下的坐標為(x ,y )、(x //,y //) =i +j =x 1+y=x //( cos i +sin j )+y //((−sin θi +cos θj )=(x //cos θ −y //sin θ+(x //sin θ +y //cos θ ⇒ 這個式子稱為轉軸公式。
[幾何解釋]:如右圖,⎯OQ=⎯OU −⎯QU=⎯OS cos θ −⎯PS sin θ =x ⎩⎨⎧+=−=θθθθcos sin sin cos ////////y x y y x x //cos θ −y //sin θ⎯PQ =⎯RS +⎯SU =⎯PS cos θ +⎯OS sin θ =x //sin θ +y //cos θ透過可解得 從另一個角度來看,把新坐標系S ⎩⎨⎧+=−=θθθθcos sin sin cos ////////y x y y x x ⎩⎨⎧+−=+=θθθθcos sin sin cos ////y x y y x x //繞原點O 旋轉有向角−θ就可變成原坐標系S ,即(x //,y //)看成原坐標,(x ,y )看成轉軸後的新坐標,那麼由轉軸公式得到 ⎩⎨⎧+−=−+−=+=−−−=θθθθθθθθcos sin )cos()sin(sin cos )sin()cos(////y x y x y y x y x x結論:(1)將直角坐標系的x 、y 軸旋轉θ角度,得到新的坐標軸x //、y //軸 點P 作這兩個坐標下的坐標分別為(x ,y )、(x //,y //),(x ,y )與(x //,y //)滿足下列關係:。
最新CAD坐标系旋转及转换
精品资料C A D坐标系旋转及转换........................................CAD坐标系旋转及转换1 笛卡尔坐标系笛卡儿坐标系又称为直角坐标系,由一个原点(坐标为(0,0))和两个通过原点的、相互垂直的坐标轴构成(见图2-11)。
其中,水平方向的坐标轴为X轴,以向右为其正方向;垂直方向的坐标轴为Y轴,以向上为其正方向。
平面上任何一点P都可以由X轴和Y轴的坐标所定义,即用一对坐标值(x,y)来定义一个点。
例如,某点的直角坐标为(3,4)。
2 极坐标系极坐标系是由一个极点和一个极轴构成(见图2-12),极轴的方向为水平向右。
平面上任何一点P都可以由该点到极点的连线长度L(>0)和连线与极轴的交角a(极角,逆时针方向为正)所定义,即用一对坐标值(L<a)来定义一个点,其中“<”表示角度。
例如,某点的极坐标为(5<30)。
3 相对坐标在某些情况下,用户需要直接通过点与点之间的相对位移来绘制图形,而不想指定每个点的绝对坐标。
为此,AutoCAD提供了使用相对坐标的办法。
所谓相对坐标,就是某点与相对点的相对位移值,在AutoCAD中相对坐标用“@”标识。
使用相对坐标时可以使用笛卡儿坐标,也可以使用极坐标,可根据具体情况而定。
例如,某一直线的起点坐标为(5,5)、终点坐标为(10,5),则终点相对于起点的相对坐标为(@5,0),用相对极坐标表示应为(@5<0)。
4 坐标值的显示在屏幕底部状态栏中显示当前光标所处位置的坐标值,该坐标值有三种显示状态,如图2-13所示。
(1) 绝对坐标状态:显示光标所在位置的坐标。
(2) 相对极坐标状态:在相对于前一点来指定第二点时可使用此状态。
(3) 关闭状态:颜色变为灰色,并“冻结”关闭时所显示的坐标值。
用户可根据需要在这三种状态之间进行切换,方法也有三种:(1) 连续按F6键可在这三种状态之间相互切换。
(2) 在状态栏中显示坐标值的区域,双击也可以进行切换。
坐标系旋转指令应用
戴晓东
坐标系旋转
O0068 //主程序 N10 G92 X0 Y0 Z50 N15 G90 G17 M03 S600 N20 G43 Z-5 H02 N25 M98 P200 //加工 N30 G68 X0 Y0 R45 //旋转45 N40 M98 P200 加工 N60 G68 X0 Y0 R90 //旋转90 N70 M98 P200 //加工 N20 G49 Z50 N80 G69 M05 M30 //取消旋转 O200 //子程序 N100 G41 G01 X20 Y5 D02 F300 N105 Y0 N110 G02 X40 R10 N120 X30 R5 N130 G03 X20 R5 N140 G00 Y-6 N145 G40 X0 Y0 N150 M99
芜湖职业技术院数控技术专业
PDF 文件使用 "pdfFactory Pro" 试用版本创建
戴晓东
坐标系旋转
例:应用坐标系旋转指令,编写图示零件的加工程序。
芜湖职业技术学院数控技术专业
PDF 文件使用 "pdfFactory Pro" 试用版本创建
戴晓东
芜湖职业技术学院数控技术专业
PDF 文件使用 "pdfFactory Pro" 试用版本创建
坐标系旋转
例:使用旋转功能编制图示轮廓的加工程序。设刀具起点 距工件上表面50mm,切削深度5mm
芜湖职业技术学院数控技术专业
PDF 文件使用 "pdfFactory Pro" 试用版本创建
芜湖职业技术学院数控技术专业
PDF 文件使用 "pdfFactory Pro" 试用版本创建
戴晓东
坐标旋转课件
使用时注意事项:
1)在有刀补的情况下,先旋转后刀补 (半径补偿、长度补偿) 。 2)在有缩放功能的情况下,先缩放后旋转。
3)G68.G69为模态指令,可相互注销, G69为开机模式。
4)角度单位为0.001度。 5)当旋转中心的坐标值为缺省时,G68指令认定当 前的位置即为旋转中心。 6)在使用旋转指令时,在子程序中必须设立一个起始点。
N50 M98 P103000;
N60 M99; %
调用子程序3000,10次
返回主程序 程序结束符,用于程序传输
子程序(轮廓加工)
程序 % 说明 程序传输格式符
O3000;
N10 G91 G1 Z-0.5 F100;
程序名
相对方式下刀每次下刀0.5mm
N20 G90 G41 X66.Y4.D1 F1500;
主程序
程序
零件加工程序 旋转相对方式编程
说明
%
O1000; N10 G21G17G49G40G80G69;
程序传输格式符
程序名 保险语句 选择工件坐标系G54,绝对坐标编程, 刀具定位至安全高度,主轴正转,转 速为3000r/min 调用子程序2000,4次 绝对方式抬刀至安全高度50mm
N20 G54G90G0Z50M3S3000;
对于某些围绕中心旋转得到的特殊的轮廓加工如果根据旋转后的实际加工轨迹进行编程就可能使坐标计算的工作量大大增加而通过图形旋转功能可以大大简化编程的工件量
项目六 坐标变换(旋转)
南昌大学科院工程训练中心 二零一五年二月
对于某些围绕中心旋转得到的特殊的轮廓加工,如果根据旋转 后的实际加工轨迹进行编程,就可能使坐标计算的工作量大大增加, 而通过图形旋转功能,可以大大简化编程的工件量。
坐标系中的旋转
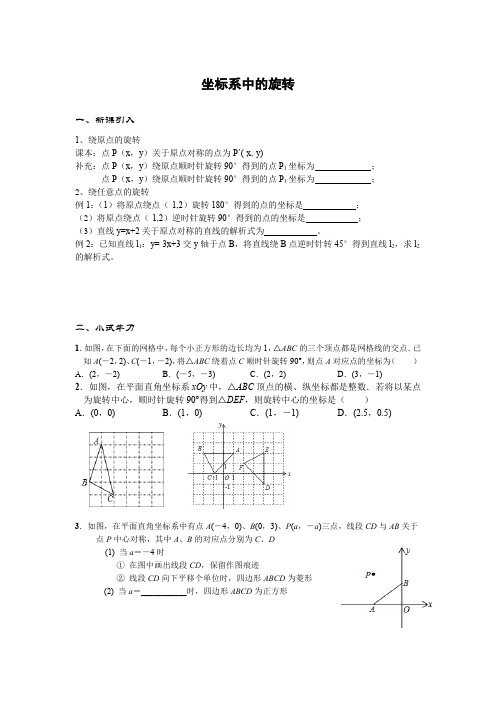
坐标系中的旋转一、新课引入1、绕原点的旋转课本:点P(x,y)关于原点对称的点为P’(-x,-y)补充:点P(x,y)绕原点顺时针旋转90°得到的点P1坐标为;点P(x,y)绕原点顺时针旋转90°得到的点P1坐标为;2、绕任意点的旋转例1:(1)将原点绕点(-1,2)旋转180°得到的点的坐标是;(2)将原点绕点(-1,2)逆时针旋转90°得到的点的坐标是;(3)直线y=x+2关于原点对称的直线的解析式为。
例2:已知直线l1:y=-3x+3交y轴于点B,将直线绕B点逆时针转45°得到直线l2,求l2的解析式。
二、小试牛刀1.如图,在下面的网格中,每个小正方形的边长均为1,△ABC的三个顶点都是网格线的交点.已知A(-2,2)、C(-1,-2),将△ABC绕着点C顺时针旋转90°,则点A对应点的坐标为()A.(2,-2) B.(-5,-3) C.(2,2) D.(3,-1)2.如图,在平面直角坐标系xOy中,△ABC顶点的横、纵坐标都是整数.若将以某点为旋转中心,顺时针旋转90°得到△DEF,则旋转中心的坐标是()A.(0,0) B.(1,0) C.(1,-1) D.(2.5,0.5)3.如图,在平面直角坐标系中有点A(-4,0)、B(0,3)、P(a,-a)三点,线段CD与AB关于点P中心对称,其中A、B的对应点分别为C、D(1) 当a=-4时①在图中画出线段CD,保留作图痕迹②线段CD向下平移个单位时,四边形ABCD为菱形(2) 当a=___________时,四边形ABCD为正方形三、拓展提升1. 如图,在平面直角坐标系中,点A 和点B 的坐标分别为A (4,0),B (0,2),将△ABO 绕点P (2,2)顺时针旋转得到△OCD ,点A ,B 和O 的对应点分别为点O ,C 和D .(1)画出△OCD ,并写出点C 和点D 的坐标;(2)连接AC ,在直线AC 的右侧取点M ,使∠AMC =45°.①若点M 在x 轴上,则点M 的坐标为 ;②若△ACM 为直角三角形,求点M 的坐标;(3)若点N 满足∠ANC >45°,请确定点N 的位置(不要求说明理由).第23题图 备用图2.在平面直角坐标系中,点C 沿着某条路径运动,以点C 为旋转中心,将点A (0,4)逆时针旋转90°到点B (m ,1),若-5≤m ≤5,则点C 运动的路径长为 .。
坐标旋转变换
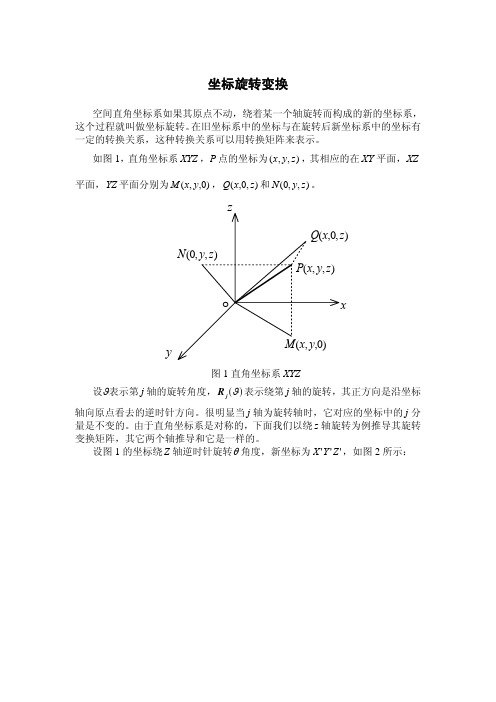
坐标旋转变换空间直角坐标系如果其原点不动,绕着某一个轴旋转而构成的新的坐标系,这个过程就叫做坐标旋转。
在旧坐标系中的坐标与在旋转后新坐标系中的坐标有一定的转换关系,这种转换关系可以用转换矩阵来表示。
如图1,直角坐标系XYZ ,P 点的坐标为),,(z y x ,其相应的在XY 平面,XZ 平面,YZ 平面分别为)0,,(y x M ,),0,(z x Q 和),,0(z y N 。
),,(z y x P Oxyz)0,,(y x M ),,0(z y N ),0,(z x Q图1直角坐标系XYZ设ϑ表示第j 轴的旋转角度,()R j ϑ表示绕第j 轴的旋转,其正方向是沿坐标轴向原点看去的逆时针方向。
很明显当j 轴为旋转轴时,它对应的坐标中的j 分量是不变的。
由于直角坐标系是对称的,下面我们以绕z 轴旋转为例推导其旋转变换矩阵,其它两个轴推导和它是一样的。
设图1的坐标绕Z 轴逆时针旋转θ角度,新坐标为'''Z Y X ,如图2所示:)',','z y x XY)0,',y ,0(N )',0,'(|)z x 'Y图2 坐标绕Z 轴逆时针旋转θ角度由于坐标中的z 分量不变,我们可以简化地在XY 平面进行分分析,如图3所示:X Y'X 'Y θθ)0,','( |)0,,(y x y x M 'X M XM ϕO图3 坐标绕Z 轴逆时针旋转θ角度的XY 平面示意图点X M 和点'X M 分别是M 点在X 轴和'X 轴的投影。
如图3⎩⎨⎧−=∠==−=∠==)sin(sin )cos(cos θϕθϕOM MOM OM MM y OM MOM OM OM x X X X X (1) ⎩⎨⎧=∠===∠==ϕϕsin sin cos cos '''''OM MOM OM MM y OM MOM OM OM x X X X X (2) 把(1)式按照三角函数展开得:⎩⎨⎧−=+=θϕθϕθϕθϕsin cos cos sin sin sin cos cos OM OM y OM OM x (3) 把(2)式代入(3)式得:⎩⎨+−=θθcos 'sin 'y x y (4) 坐标中的z 分量不变,即'z z =这样整个三维坐标变换就可以写成(用新坐标表示就坐标):⎪⎩⎪⎨⎧=+−=+='cos 'sin 'sin 'cos 'z z y x y y x x θθθθ (5) 把式(5)用一个坐标旋转变换矩阵()θR Z 表示可以写成:()⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡'''z y x z y x Z θR (6)()⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡−=1 0 0 0 cos sin 0 sin cos θθθθθR Z (7) 坐标系'''Z Y X 是坐标系XYZ 绕Z 轴逆时针旋转θ角度而来,从另一个角度来看,也可以说坐标系XYZ 是坐标系'''Z Y X 绕'Z 轴逆时针旋转θ−角度而来,所以根据(6)式有(上标"1"−表示矩阵的逆):()()()θR θR θR −=⇒⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡−=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡−Z Z Z z y x z y x 1''' (8)用同样的分析办法,当绕X 轴逆时针旋转θ角度其YZ 平面分析如图4所示:Y Z'Y 'Z θθ)',0,'(|),0,(z x z x N 'Y N YN ϕO图4 坐标绕X 轴逆时针旋转θ角度的YZ 平面示意图其坐标转换关系为:⎪⎩⎪⎨=+−='cos 'sin 'x x z y z θθ (9) ()⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡−=θθθcos sin 0sin cos 00 0 1θX θR (10) ()()θR θR −=−X X 1 (11)当绕Y 轴逆时针旋转θ角度得其XZ 平面分析如图5所示(注意和前面两个角度方向不一样):XZ'X 'Z θθ)',',0( |),,0(z y z y Q 'X Q XQ ϕO图5 坐标绕Y 轴逆时针旋转θ角度的XZ 平面示意图⎪⎩⎪⎨⎧=+=−='cos 'sin 'sin 'cos 'y y z x z z x x θθθθ (12) ()⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡−=θθθcos 0 sin 0 1 0sin 0 cos θY θR (13) ()()θR θR −=−Y Y1(14)。
在CAD中绘制进行旋转和缩放的技巧
在CAD中绘制进行旋转和缩放的技巧在CAD中,绘制进行旋转和缩放是非常常见的操作。
在本篇文章中,我们将介绍几种实用的技巧,让您能够更加高效地在CAD软件中进行这些操作。
首先,让我们先来了解一下旋转的操作技巧。
在CAD软件中,旋转可以通过不同的方法实现,下面是两种常见的方式:1. 选择旋转:首先,您需要选择要旋转的对象。
然后,点击CAD工具栏上的旋转工具或使用快捷键来启动旋转命令。
接下来,您需要选择基点,即旋转的中心点。
您可以输入坐标,或者选择一个点作为基点。
最后,输入旋转角度并按下回车键,即可完成旋转操作。
2. 三维旋转:如果您需要进行三维旋转,可以使用CAD软件中的三维旋转工具来实现。
首先,选择要进行旋转的对象。
然后,点击CAD工具栏上的三维旋转工具或使用快捷键来启动三维旋转命令。
接下来,您需要选择旋转轴。
您可以输入坐标,或者选择一个轴线作为旋转轴。
最后,输入旋转角度并按下回车键,即可完成三维旋转操作。
接下来,让我们来了解一下缩放的操作技巧。
在CAD软件中,缩放可以通过不同的方法实现,下面是两种常见的方式:1. 锁定比例缩放:首先,选择要缩放的对象。
然后,点击CAD工具栏上的缩放工具或使用快捷键来启动缩放命令。
接下来,您需要选择基点,即缩放的中心点。
您可以输入坐标,或者选择一个点作为基点。
最后,输入缩放比例并按下回车键,即可完成缩放操作。
在输入缩放比例时,如果您希望保持比例不变,可以在输入缩放比例前加上“s”(例如,s2表示缩放为原来的2倍)。
2. 非等比缩放:如果您希望进行非等比缩放,可以使用CAD软件中的非等比缩放工具来实现。
首先,选择要进行缩放的对象。
然后,点击CAD工具栏上的非等比缩放工具或使用快捷键来启动非等比缩放命令。
接下来,您需要选择基点,即缩放的中心点。
您可以输入坐标,或者选择一个点作为基点。
最后,输入缩放系数并按下回车键,即可完成非等比缩放操作。
除了上述的基本操作技巧外,CAD还提供了许多其他高级的旋转和缩放工具和功能,比如可以通过指定旋转轴和参考点来进行旋转,也可以通过指定比例系数和参考点来进行缩放。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
不改变坐标原点的位置和单位长度,只改变坐标轴方向的
动
坐标系的变换,叫做坐标轴的旋转.
脑
由此得到坐标轴的旋转的坐标变换公式
思
y
M
x1
y1
x1 y1
x cos y cos
y x
sin, sin .
想一(想2.3) 公式(2.3)和
考 探
o
将新坐标系看作原坐标系,公则式旋(转2.角4)度的为区
第16章 坐标变换与参数方程
16.2 坐标轴旋转
不改变坐标原点的位置和单位长度,只改变坐标轴方向的
动
坐标系的变换,叫做坐标轴的旋转.
脑
设点M在原坐标系 xOy 中的坐标为(x,y),对应向量 OM 的模
思
为r,辐角为 .将坐标轴绕坐标原点,按照逆时针方向旋转角
y
M
x1
形成新坐标系 x1Oy1,点M在新坐标系x1Oy1
y1
1 2
y
3 x. 2
典
型 将各点的原坐标分别代入公式,
得到各点的新坐标分别为
例
题 A(1 3 ,1 3),B( 1 3,1 3 ),C(5 3 ,5).
22
2
2
22
例4 设点M在原坐标系xOy中的坐标为(x,y),首先平移坐标轴,
将坐标原点移至 O1(x0, y0 ),构成坐标系x1O1y1,然后再将坐标轴绕点
x1 cos y1 cos
y1 x1
sin, sin .
典 型 例
因此得
x2 y2
(x (y
x0 ) cos y0 ) cos
(y (x
y0 )sin, x0 )sin.
题
1.
将坐标轴旋转
π 4
,求点
A(
2,2 ),B(
2,2
2),C(0,2) 的
运
新坐标.
用
A(2,0),B(1,3),C( 2,2).
巩
O1旋转 角构成新坐标系x2O1y2 .求点M在新坐标系x2O1y2中的坐标.
固
解 设点M在坐标系x1O1 y1 中的坐标为 (x1, y1),点M在新坐标系
x2O1 y2中的坐标为 (x2, y2 ),则由公式(2.2)得
知 识
x1 y1
x y
x0, y0 .
由公式(2.3)得Biblioteka x2 y2检测
读书部分:阅读教材相关章节
继 续
书面作业:教材习题
探
索
学习与训练
活
动
探
究
作业
知识回顾 Knowledge Review
祝您成功!
知
2.平移坐标轴,把坐标原点移至
π
O(1 -1,1),然后再将坐
标轴旋转 4,求原坐标系中点(1,2)的新坐标(精确到0.01).
识
强 化
(2.12, 0.71).
练
习
坐标轴旋转的坐标变换公式
自
我
x1 y1
x cos y cos
y x
sin, sin .
(2.3)
反 思
目
x y
x1 cos y1 cos
x
,代入公式(2.3)得
别在哪里?使用
x y
x1 y1
cos cos
y1 x1
sin , sin .
公式要注意些什 么问(题2?.4)
索 新 知
例3
将坐标轴旋转
π 3
,求点A(2,1),B(-1,2),C
(0,5)的新
巩
坐标(如图).
解 由公式(2.3)得
固
x1
1 2
x
3 y, 2
知 识
y1 x1
sin , sin .
(2.4)
标 检
测
学习方法
学习行为
学习效果
自
我
反
思
目 标 检 测
将坐标轴旋转5º,求点A(0.2,1.5) ,B(-2.3,2) ,
自
我
C (0,3.2)的新坐标(精确到0.01).
反
思
目
标
A(0.33,1.48),B(1.71,3.36),C(0.28,3.19).
考
y1
中的坐标为 (x1 , y1() 如图),则
探
o
x
x r cos, y r sin
索
x1 r cos( ),y1 r sin( ),
新
于是 x1 r cos cos r sin sin x cos y sin ,
知
y1 r sin cos r cos sin y cos xsin.