第3&4章 平面机构的运动分析
八年级下册语文第三课生字词的拼音意思

八年级下册语文第三课生字词的拼音意思第3课:困倦kùn juàn 是指困乏,疲倦。
语出唐郑檠《开天传信记》;“师自远而来,困倦,欲于何方休息耶?" 骤雨zhòu yü本义为暴雨。
骤雨,又称阵雨,指的是为时不长的降雨,其强度变化可以很大。
飞溅fei jiàn 向四外溅。
蓦然mà rán 猛然:不经心地。
捶打chui da用拳头或器物撞击物体。
烧灼shao zhuó烧烫(人的皮肉) 。
瞳仁tóngrén 也叫“瞳人”,通俗意思指眼珠。
恬静tiánjing 褒义词,形容为人闲适、安静。
聒噪guōzao (1)说话琐碎,声音喧闹,令人烦躁。
(2)江湖上打招呼用的习惯语。
犹言打扰了,对不起。
多见于早期白话作品。
(3)泛指打扰,烦。
亢奋kàng fen 形容极度兴奋的样子。
晦暗huìan 昏暗、暗淡。
束缚shufù意思是缠住不能脱身。
羁绊jībàn 缠住了不能脱身,束缚。
闭塞sè1、堵塞管道2、交通不便,偏僻;风气不开。
战栗zhanlì也做颤栗,发抖。
冗杂rǒng事务繁杂。
严峻jùn 1、严厉、严肃:~的考验,~的表情2、严重;形势。
震撼hàn 震动、摇撼。
磅礴páng bó1、气势盛大、雄伟辐射fú1、从中心各个方向沿直线伸展出去2、电磁波或微观粒子流。
渺远miǎo 年代久远,历史悠长。
大彻大悟chè彻底觉悟或醒悟。
叹为观止赞美看到的事物好到了极点。
戛然而止jiá形容声音突然终止。
1。
第三章 船员
我国2004年8月1日起施行《中华人民共和 国船舶最低安全配员规则》,自2006年5月 1日实施《关于修改船舶最低安全配员表的 通知》。
海船甲板部、轮机部和客运部最低安全配员表
甲 板 部 船舶种类、航区、吨位或 总功率 一般规定 船长、大副、二副、三副各1人,值班 水手3人。 船长、大副、三副各1人,值班水手3 人。 附加规定 连续航行时间不超过36小时,可减免三副和值 班水手各1人。 连续航行时间不超过36小时,可减免值班水手1 人;连续航行时间不超过8小时, 可再减免三 副1人。 连续航行时间超过24小时, 须增加二副1人。 连续航行时间不超过 4小时,可减免三副1人 及值班水手1人。 连续航行时间超过36小时,须增加二副1人。 连续航行时间不超过8小时,可减免三副1人 。 续航行时间不超过 4小时,可减免值班水手1人。
3000总吨及以上
500总吨及以上至未满 3000总吨 一 200总吨及以上至未满 般 500总吨 船 舶 100总吨及以上至未满 200总吨
船长、三副各1人,值班水手2人。
船长、三副各1人,值班水手1人。 驾驶员(国际航行船舶为船长;机驾 合一为驾机员)1人,值班水手1人。
未满100总吨
海船无线电人员最低安全配员表
三、船员的资格
各国对船员的任职资格普遍实行船员考试发证制度,只 有持有合格职务证书的船员,才准许在船上担任相应的 职务。 为了统一考试的原则和标准,使船员达到一定程度的水 平,1978年7月国际海事组织(IMO)在伦敦召开国 际会议,讨论通过了1978年《海员培训、发证和值班 标准国际公约》简称《STCW78公约》) 1995年7月7日,国际海事组织的外交大会正式通过了 公约附则的修正案STCW规则,也就是《STCW95公 约》 为适应新的公约的要求,我国交通部于2004年颁布了 《中华人民共和国海船船员适任考试、评估和发证规 则》。
新蕾快乐英语第三册译文

[00:00:00]Unit 1 Toys[译文]第1单元玩具[00:04.11]1 Look at my robot.[译文]1看我的机器人。
[00:06.64]Let's listen and say.[译文]让我们听和说。
[00:09.21]a toy truck[译文]一辆玩具卡车[00:14.31]a toy jeep[译文]一辆玩具吉普车[00:19.00]a toy digger[译文]一辆玩具挖土车[00:23.25]a robot[译文]一个机器人[00:27.38]building blocks[译文]积木[00:31.71]Let's chant![译文]唱一唱![00:34.43]Look at my toy truck. Wow! Good![译文]看我的玩具卡车。
哇!好![00:41.31]Look at my toy jeep. Wow! Great![译文]看我的玩具吉普车。
哇!太好了![00:44.88]Look at my toy digger. Wow! Cool![译文]看我的玩具挖土车。
哇!酷![00:48.52]Look at my building blocks. Wow! Nice![译文]看我的积木。
哇!好![00:52.11]Look! Look! Look at my robot. Wow! Wow! Super! Super![译文]看!看!看我的机器人。
哇!哇!太好了!太好了![01:00.09]Let's play together.[译文]让我们一起来玩吧。
[01:02.53]Great![译文]太好了![01:04.57]Let's sing![译文]我们来唱歌![01:07.41]I have a toy truck. Beep, beep...[译文]我有一辆玩具卡车。
嘟,嘟……[01:20.14]I have a toy jeep. Beep, beep...[译文]我有一辆玩具吉普车。
第三章+物态变化++练习+--2024-2025学年人教版物理八年级上册+

2. 图中各温度计(温度单位都是摄氏度) 的示数分别是多少?
解析
甲图中液面位置在0℃以下,温度低于0℃,示数为-5 ℃ ; 乙图中液面位置在0℃以上,温度高于0℃,示数为9℃ ; 丙图中温度计的分度值为2℃ ,示数为12℃ 。
3.在教室里挂一支寒署表,在每节课前测出教室的温度,将数据记录在表格中。以 时间为横轴、温度为纵轴,在图上描点并分别画出晴天及阴天两种天气的温度-时间 图像。通过比较,你能发现这两种天气温度变化的规律吗?
解析
水蒸发的快慢与其表面积大小、温度、表 面空气的流速有关。坎儿井在地下,可以 降低水的温度、减慢水上方空气流动的速 度,同时井口很小,也减小了水的蒸发面 积,从而减少水的蒸发。
第4节 升华和凝华
1. 观察碘的升华时,为什么利用浇热水或浇凉水的方式而不用酒精灯直接 加热含有碘颗粒的玻璃容器呢?请你查阅碘的熔点和酒精灯火焰的温度, 说明原因。
解析
【解析】此题是一道实际操作题,可先分别读出一天当中不同时刻教室内的温度,描绘 出温度一时间变化曲线。然后比较阴天和晴天的温度变化,得出规律。
4. 不同物质在升高同样温度时,膨胀的多少通常是不同的。如 果把铜片和铁片铆在一起,当温度变化时这样的双金属片就会 弯曲。市场上有一种指针式寒暑表,就是用双金属片做感温元 件的。怎样用上述原理制成一做下面的实验,并思 考形成霜的条件。如图所示,将冰块放于易拉罐中并 加入适量的盐。用筷子搅拌大约半分钟,用温度计测 量罐中冰与盐水混合物的温度,可以看到混合物的温 度低于0°C。这时观察易拉罐的下部和底部,就会发现 白霜。
解析
美丽的树挂、霜都是空气中的水蒸气凝华形成的。 在盛有冰的易拉罐里面放入盐后,会使冰的凝固点降低,所以会有大量的冰 熔化成水,冰熔化成水时要吸热,因此易拉罐的表面温度也会变低(低于 0°),所以易拉罐表面会让空气里的水蒸汽凝华,从而形成了白霜。
第三章柱下条形基础、箱基和筏基
连续基础一般可看成是地基上的受弯构件— —梁或板。它们的挠曲特征、基底反力和截面内
力分布都与地基、基础以及上部结构的相对刚度
特征有关。因此,应该从三者相互作用的观点出 发,采用适当的方法进行地基上梁或板的分析与 设计。
上海金茂大厦
• • • • • 1、软弱地基 2、桩筏基础(筏板:厚度4m,埋深18m 钢管桩的意义?) 比较: 刚性基础、扩展基础与连续基础的不同点?
为:
P 1 2 s E0 r
对于均布矩形荷载p0作用下矩形面积中心点 的沉降,可以通过对上式积分求得:
2(1 2 ) b l 2 b 2 l l 2 b2 s b ln l ln p0 E0 l b
地基变形各个结点沉降量:
3-1-3 常用地基模型
土的应力应变特性:非线性、弹塑性、土的各向异性、 结构性、流变性、 剪胀性。 影响土应力应变关系的应力条件:应力水平、应力路径、 应力历史。 三者共同作用的难点:选择正确的、理想的地基模型。
• 考虑地基、基础和上部结构共同作用的关键是确 定地基模型。所谓地基模型是指地基表面的荷载 强度与地基表面的沉降之间的关系。 目前使用的地基模型主要是线性弹性地基模型。 下面介绍3类有代表性的线性模型,其中主要是 Winkler地基模型。
二、地基与基础的共同作用
• 地基的刚度就是地基抵抗变形的能力,表现为土的软硬或 压缩性。 • 1、若地基土不可压缩,则基础不会产生挠曲,上部结构 不会因基础不均匀沉降而产生附加内力,(书93图3-6) 这种情况,共同作用的相互影响很微弱,上部结构、基础 和地基三者可以分割开来分别进行计算, • 2、对于压缩性大的地基或非均匀性地基,考虑地基与基 础的共同作用就很有必要。基础将上部结构的荷载传递给 地基,在这一过程中,通过自身的刚度,对上调整上部结 构荷载,对下约束地基变形,使上部结构、基础和地基形 成一个共同受力、变形协调的整体,这是可以研究两种特 殊情况:绝对刚性和绝对柔性的基础
第三章 用户接口与作业调度

优点:实现简单、公平 缺点:没考虑资源利用率和作业的特殊性
2. 短作业优先作业调度算法
基本思想:要求每个用户对自己作业所需耗费的
3.3 交互式作业(Cont.)
终端命令解释程序 提示符$
读入终端命令
分析
No Yes Logout? 建立子进程 后台命令? Yes 输出子进程号 Yes
记账
终止
内部命令?
No No
处理
等子进程结束
3.4 系统调用(SYSTEM CALL)
系统调用是操作系统提供给软件开发人员的 唯一接口,开发人员可利用它使用系统功能。 OS核心中都有一组实现系统功能的过程(子 程序),系统调用就是对上述过程的调用。
作业的组成
作业由程序、数据和作业说明书三部分组成。 • 作业说明书包括作业基本情况、作业控制、作业 资源要求的描述;它体现用户的控制意图。如: 预计运行时间、要求的资源情况、执行优先级等。
– 作业基本情况:用户名、作业名、编程语言、最大处 理时间等; – 作业控制描述:作业控制方式、作业步的操作顺序、 作业执行出错处理; – 作业资源要求描述:处理时间、优先级、内存空间、 外设类型和数量等;
. 3 响应比高者优先作业调度算法
基本思想:在进行作业调度时,先计算每个
作业当时的响应比:
响应比 = ( 已等待时间 ) / ( 所需CPU时间 )
然后从中挑选出响应比最高的作业作为调度的对
象。
– 优点: 公平,吞吐率大 – 缺点: 增加择最高的作业。优先数
第三章晶态聚合物
a bc a=b=g=90
2.1.2 聚合物在晶体中的构象
等同周期(或称纤维周期):高分子晶体 中,在 c 轴方向化学结构和几何结构重复单 元的距离。
一般将分子链的方向定义为 c 轴, 主轴在晶
态高分子中,分子链多采用分子内能量最 低的构象,即孤立分子链在能量上最优选 的构象。
20
平面锯齿结构(plane zigzag)
型条件不同,制品性能也有很大差别。例如:缓慢冷却的
PET(涤纶片)是脆性的;迅速冷却,双轴拉伸的PET(涤 纶薄膜)是韧性很好的材料。
尽管一种材料的基本性能取决于它的分子链的结构,但其本
体性质则是由分子链的排列状态所控制的。如果把物质的成 分看作是砖的话,那么决定一座房子的最终性能和特征的是 用怎样的方式把砖垒起来。所以,研究高分子聚集态结构特
X射线衍射曲线 X-ray diffraction
11
X-射线衍射的基本原理 X-ray Diffraction (XRD)
① ② ③ 3a 2a 1a 2b 3c
AB + BC = 2dsinq
2dsinq = nl
q
A B C
d
12
布拉格定律 (Bragg’s Law)
当两束光的光程差为入射光波长的整数倍时, 反
汽化时所作的膨胀功
内聚能密度(CED):单位体积凝聚体汽化时所需要的能量 (Cohesive Energy Density) DE
CED =
Vm
摩尔体积
9
由于聚合物不能汽化,所以不能采用直接方法来测定,
而用间接方法。
CED< 290 橡胶:分子间力较小,分子链较柔顺,易
变形,有弹性,聚乙烯例外 290<CED<420 塑料:分子间力居中,分子链刚性较 大 CED>420 纤维:分子间力大,有较高的强度
3第三类日化用品
第三类洗衣用漂白剂及其他物料;清洁、擦亮、去渍及研磨用制剂;肥皂;香料,香精油,化妆品,洗发水;牙膏。
【注释】第三类主要包括清洁制剂和梳妆用制剂。
本类尤其包括:——人用或动物用除臭剂;——室内芳香剂;——梳妆用卫生制剂。
本类尤其不包括:——清洁烟囱用化学制品(第一类);——生产过程中用的去渍制剂(第一类);——非人用、非动物用除臭剂(第五类);——磨石和砂轮(手工具)(第八类)。
0301杏仁肥皂030007,肥皂030012,剃须皂030017,洗发液030034,消毒皂030080,洗涤用皂树皮030093,洁肤乳液030123,药皂030130,洗发剂030134,汗足皂030143,除臭皂030149,香皂030152,防汗皂030163,非医用沐浴盐030175,个人清洁或祛味用下体注洗液030218,干洗式洗发剂030223※洗手膏C030001,洗发粉C030002,香波C030003,洗发软皂C030004,柔发剂C030005,护发素C030006,洗面奶C030007,浴液C030008,浴盐C030009,抑菌洗手剂C030010洗涤上光粉030009,洗衣用浆粉030010,洗衣用淀粉030010,纺织品上光皂030013,洗衣用上蓝剂030014,漂白盐030026,漂白碱030027,洗衣用漂白剂030028,洗衣上光剂030029,洗衣用蜡030051,洗衣浸泡剂030098,浸洗衣服制剂030098,洗衣剂030124,光滑剂(上浆)030127,家用亮色化学品(洗衣用)030174,家庭洗衣用亮色化学品030174,洗衣用织物柔软剂030193,洗衣用织物软化剂030193,干洗剂030205※护领膜C030012,洗衣粉C030067新增非规范:个人用纸肥皂0301,护发用浴油0301,化妆用沐浴油0301,洁肤霜(化妆品)0301,浸有皮肤清洁液的纸巾0301,美容皂0301,沐浴乳0301,沐浴油0301,身体用膏状肥皂0301,浴珠(珠状沐浴剂)0301注:1.第一、二自然段与0306商品类似;2.第一、二自然段与0501药浴制剂,浴用泥浆,药浴用海水类似,与第九版及以前版本0501医用浴剂交叉检索;3.非医用沐浴盐,浴盐与0501矿泉水沐浴盐类似,与第九版及以前版本矿泉水浴盐交叉检索;4.个人清洁或祛味用下体注洗液与0501第(一)部分医用下体注洗液,阴道清洗液类似;5.第三、四自然段与0302商品类似;6.第三、四自然段与0303皮革漂白制剂,皮革洗涤剂类似;7.漂白盐,漂白碱,洗衣用漂白剂,漂白剂(洗衣)与0503漂白粉(消毒)类似,与第九版及以前版本0104第(一)部分漂白剂交叉检索。
工程流体力学第三章

则总压力P 则总压力P为: 其中 代入上式,则: 代入上式,
(1)
对于本例即
它表明作用在平面 A 的液体总压力,等于浸水面积 A 与形心点 的液体总压力, 的静压力 γhc的乘积。 的乘积。 可理解为一假想体积的液重,即以浸水面积 A 为底,面积 A 的 为底, 可理解为一假想体积的液重, 形心淹没深度h 为高的这样一个体积包围的液体重量。 形心淹没深度hc为高的这样一个体积包围的液体重量。
一点的质量力必然垂直于通过该点的等压面。 一点的质量力必然垂直于通过该点的等压面。 等压面概念对解决许多流体平衡问题很有用处, 等压面概念对解决许多流体平衡问题很有用处,它是液柱式压力计测压原理的重 要基础。 要基础。 根据等压面性质,我们可以在已知质量力的方向,去确定等压面的形状, 根据等压面性质,我们可以在已知质量力的方向,去确定等压面的形状,或已知 等压面的形状去确定质量力的方向。 等压面的形状去确定质量力的方向。
根据等压面的特性可以更普遍地证明:两种不同流体处于平衡状态时,其 根据等压面的特性可以更普遍地证明:两种不同流体处于平衡状态时, 相互接触的(但互不相混)分界面必然是等压面。 相互接触的(但互不相混)分界面必然是等压面。
( 4 )正压流场 流体的密度只是压力的函数的流场称之为正压流场,即在正压流场中 流体的密度只是压力的函数的流场称之为正压流场,
§3 . 3 某些流体静力学基本问题
在工程技术中,许多的工业过程与流体静力学相关,研究这些问 在工程技术中,许多的工业过程与流体静力学相关, 题就需要流体静力学的知识。 题就需要流体静力学的知识。 一、压力分布与受力分析 对于流体静力学基本方程: 对于流体静力学基本方程:
∂P = ρ fx; ∂x ∂P = ρ fy; ∂y
第三章 标引的基本知识

系统。主题词的数量较多,7-8个/篇。
浅标引:对文献内容揭示较浅的标引,只反映 文献的主要概念,主要用于手工检索系统。主题 词的数量较少,4-5个/篇。
6.按标引的内容范围划分: 概括标引(整体标引、浅标引) 全面标引(深标引) 分析标引
对口标引(重点标引)
Ⅱ
4~5
IM词2~3个 NIM词2~3个
二、标引等级及其与标引深度的关系 (一)标引等级(Indexing degree): 是指将文献中的概念根据主次按等级划分,分为 三个等级。即一级概念标引、二级概念标引和 三级概念标引。
(二)标引等级的划分标准: 1、一级概念标引,也称主要标引(IM词) 它既用于手检系统标引,也用于机检系统标引。 1)反映文献主要论点或作者研究目的的内容, 讨论篇幅≥2/3的内容; 2)有创新的实验研究或诊疗方法手段。 3)重点讨论的专指性概念。
第三章 标引的基本知识
第一节
标引的概念和类型 第二节 标引和检索的关系 第三节 标引深度和标引等级
第一节 标引的概念及类型
一、标引的概念 二、标引的类型 三、国内外标引方式比较表
一、标引的概念
我国国家标准局GB3860-83《文献主题标引 规则》对标引的定义是: 标引(Indexing)是对文献进行主题分析, 从自然语言转换成规范化的检索语言的过 程。对文献给予分类号标识的过程,称为 分类标引 (Classification Indexing); 给予主题词标识的过程称为主题标引 (Subject Indexing)。
综合标引:例如:校园紫贝壳丛书 分散标引
轻风吹过风铃花
心叶舒展成风 那个含泪的射手
三、国内外标引方式比较表
第一视角和第三视角的区别

1 概述当今世界上,ISO国际标准规定,第一角和第三角投影同等有效。
各国根据国情均有所侧重,其中俄罗斯、乌克兰、德国、罗马尼亚、捷克、斯洛伐克以及东欧等国均主要用第一角投影,而美国、日本、法国、英国、加拿大、瑞士、澳大利业、荷兰和墨西哥等国均主要用第三角投影。
解放前我国也采用第三角投影,新中国成立后改用第一角投影。
在引进的国外机械图样和科技书刊中经常会遇到第三角投影。
ISO国际标准规定了第一角和第三角的投影标记(图1和图2)。
在标题栏中,画有标记符号,根据这些符号可识别图样画法,但有的图纸无投影标记。
图1 第一角画法标记符号图2 第三角画法标记符号2 第三角投影空间可由正平面V、水平面H、侧平面W将其划分成八个区域,分别为第1、第2、第3、第4、第5、第6、第7、第8分角,如图3所示。
图32.1 将物体放在第一分角内投影称为第一角投影,又称E法——欧洲的方法。
2.2 将物体放在第三分角内投影称为第三角投影,又称为A法——美国的方法。
我国用的是第三角投影法。
第三角投影是假想将物体放在透明的玻璃盒中,以玻璃盒的每个侧面作为投影面,按照人—面—物的位置作正投影而得到图形的方法,如图4、图5。
图4 图52.3 第三角投影中六个基本视图的位置ISO国际标准规定,第三角投影中六个基本视图的位置如图6所示。
图6以上视图是将物体投影到一个封闭矩形(透明的)“投影箱”的各个投影面上而得到的。
每个视图都可以理解为:当观察者的视线垂直与相应的投影面时,他所看到的物体的实际图像。
前视图即观察者假想自己处于物体的前面,并逐点移动眼睛的位置,且视线始终垂直于一个假想的正立投影面(透明的)而得到的物体的正面投影,其它视图可按类似方法获得。
读图者应当始终把视图看作是物体本身的一面。
从前视图可看出物体的高度与宽度,以及物体顶面、底面、左侧面和右侧面的位置。
顶视图显示物体的深度和宽度。
2.4 第三角投影的优点(1)视图配置较好,便于识图视图之间直接反映了视向,便于看图,便于作图。
生物反应工程第三章答案

第3章 固定化酶催化反应过程动力学一、基本内容:酶的固定化是为了解决游离酶分子在催化反应过程中不易回收、稳定性差、操作成本太高而采用的一种方法。
酶固定化后必然会对其催化反应动力学有一定的影响。
因此,本章主要分析来阐明固定化酶与游离酶催化反应动力学的区别,并对重要的扩散效应进行了详尽的研究。
1、固定化酶是通过物理或化学方法,将游离酶转变成为在一定空间内其运动受到完全约束、或受到局部约束的一种不溶于水,但仍具有活性的酶。
主要优点有:易于分离、可反复使用、增加稳定性、提高机械强度、便于生产连续化和自动化、降低酶催化反应操作成本等。
2、酶的固定化方法有:吸附法、包埋法、共价法、交联法。
每种固定化方法均有利有弊,要根据实际情况进行选择。
3、影响固定化酶动力学的因素有:空间效应(包括构象效应和位阻效应)、分配效应(包括亲水效应、疏水效应和静电效应)和扩散效应(包括外扩散效应和内扩散效应)。
不同因素对酶动力学影响结果见下图:游离酶固定化酶改变的本征速率和动力学参数固有速率和动力学参数宏观速率和动力学参数本征速率和动力学参数空间效应分配效应扩散效应4、固定化酶催化反应外扩散效应。
固定化酶与溶液中底物反应过程包括三步:(1)底物从液相主体扩散到固定化酶表面;(2)底物在固定化酶表面进行反应;(3)产物从固定化酶表面扩散到液相主体。
其中酶催化反应速率可由M -M 方程表示max SiSi m S r C R K C =+0()S Si i;底物由液相扩散到催化剂表面速率可表示为Sd L R k a C C =−。
在稳态时,应存在Si Sd R R =,即max 0()SiL S Si m S r C k a C C K C −=+i。
5、固定化酶催化反应外扩散效应影响下反应速率的求解。
主要包括两个方面:由表面浓度C Si 求解和由有效因子E η求解。
(1)表面浓度C Si 求解。
由式max max00max 0002()10Si SiL S Si S Si m Si L m SiSi m S S S L S SS S Sr C r C k a C C C C K C k a K C C K r C K C C k aC C C C K C K C −=⇒−=++−⇒+引入=,=,定义Da=可得:=Da +(+Da-1)=S K −Da-1当a>0时,取“+”号,当a<0时,取“-”号。
民法典的第三人原因造成违约时违约责任承担有什么规定
民法典的第三⼈原因造成违约时违约责任承担有什么规定在签订合同时,往往可能并不只有双⽅当事⼈还涉及到第3⽅,如果有第三⽅出场造成整个民事⾏为中有违约责任的,到时候对于责任的分配就需要第三⼈参与。
那么第三⼈原因造成违约时违约责任承担有什么规定呢,店铺⼩编已经整理了如下的内容供⼤家做法律参考。
⼀、民法典的第三⼈原因造成违约时违约责任承担有什么规定根据《民法典》第五百九⼗三条当事⼈⼀⽅因第三⼈的原因造成违约的,应当依法向对⽅承担违约责任。
当事⼈⼀⽅和第三⼈之间的纠纷,依照法律规定或者按照约定处理。
⼆、对因第三⼈原因违约的处理规则违约是由第三⼈造成的,为因第三⼈原因造成的违约。
因第三⼈原因造成⼀⽅当事⼈违约的,如第三⼈迟延交货造成⼀⽅当事⼈迟延履⾏的,该当事⼈应当承担违约责任。
该当事⼈承担违约责任后,应当向第三⼈追偿。
第三⼈原因构成意外事故致使⼀⽅当事⼈违约,且第三⼈⽆⼒赔偿的,损失由双⽅当事⼈分担。
处理的原则:1、合同⼀⽅应向对⽅承担违约责任。
在因第三⼈原因违约的情况下,第三⼈并不向债权⼈承担违约责任,债权⼈亦不得向第三⼈提出承担违约责任的请求。
这是由合同的相对性原理决定的。
2、当事⼈⼀⽅与第三⽅的关系依法律规定或约定处理。
在因第三⼈原因违约的情形,当事⼈⼀⽅应⾸先向对⽅承担责任,但这并不意味着第三⼈不再承担任何责任。
因第三⼈原因违约⽽使违约⽅遭受了损失,违约⽅当然可向第三⼈主张权利。
在签订民事⾏为合同之后,如果因为第3⼈的原因造成了违约责任的这种情况,要区分具体的情况,如果是当事⼈和第三⽅有关系,让对⽅加⼊进来的这个时候,当事⼈的⼀⽅和第三⽅都要承担相关责任。
以上就是⼩编整理的回答,如有其它需求欢迎到店铺做相关的法律咨询。
第三章 吸振原理隔振原理

吸振原理-复式动力吸振器
吸振原理
为了增加吸振频带宽度,可使用复式动力吸振器. M,K,C分别为设备的质量、刚度和阻尼,受到一个单频振动力的激励.为了 降低其响应:V的幅值,复式动力吸振器采用在其上附加两个弹性子系统(M,K1,C1) 和(M2,K2,C2)或多个弹性子系统的方法,分别吸收设备在不同频段的扰动能 量.系统中各质量块位移方程为
K2 M 1M 2 3K1M 2 K1 , C2 3 M1 M 2 2 1 M 2 / M 1
吸振原理
• 设备质量M1为10kg,临界阻尼比 为1 C1 / 2 M1K1 0.001,刚度K1为10000N/m, 而欲降低的振动频率为5Hz(设备的共振频 率). • 扰动力幅值为1N,则设备的振动幅度为图 中一个尖峰的曲线.
0 2 2 2 2 2 4 2 2 [(1 ) (1 2(1 ) ] 2
2
• 从方程组(2)中的第一个方程可以看出,若ω=ωb,则
Y1 0, { Y2 Yst / ( K2 / K1 ) F / K2
吸振原理
, b 0 , b 0 , y1 , y2
吸振原理
Y1 Yst [1 (b )2 ]/{[1 (0 )2 K 2 / K1 ][1 (b ) 2 ] K 2 / K1} Y2 Yst /{[1 (0 )2 K 2 / K1 ][1 (b )2 ] K 2 / K1}
• 吸振器的质量M2为lkg,是设备质量的十分 之一,若设计吸振器的共振频率为扰动力 的频率,即5Hz,得吸振器在阻尼比 ζ2=0.001时,刚度K2为1000N/m.
• 此时,设备的振动幅值曲线为图中的有两 个尖峰的曲线.
第三章供应链驱动因素

安全库存:为了处理需求超出预期的情况 而持有的存货,它是为了对付不确定性。 例如玩具零售商为了在假日的旺季计 算安全库存。 选择安全库存就要作出取舍,要在库 存积压所带来的成本与库存短缺所损失的 销量之间作出权衡。
8
季节性库存:为处理预测需求的波动而建 立的。 面临的决策:是否需要建立季节性库 存?如果是,需要建立多少。 产品可获性水平:库存的产品中能够准时 满足需求那部分的比例。 选择高产品可获性水平而导致的库存 成本与没有选择高产品可获性水平所带来 的损失之间的比较结果。 库存总权衡:在响应性与效率之间作出选择。
9
三、运输
Laura Ashley公司通过邮购目录销售衣服和其他 家庭用品,运输是其竞争战略的一部分。 Laura Ashley的顾客愿意为高水平的响应性支 付高价。为了达到这个高水平的响应性,该公司 将主要仓库设在靠近田纳孟非斯的联邦快递的枢 纽的地方,以更好地利用联邦快递所提供的快速 反应的运输。当有订购时,货物能够比较容易且 快速地从Laura Ashley公司的仓库运往联邦快 递的枢纽,在那它们将连夜被送到顾客手中。这 一运输策略使Laura Ashley公司的顾客可以以 晚于其他公司的时间订货,却仍然可以在第二天 收到货物。
2
一、设施 丰田和本田 丰田和本田都使用设施决策以更快速地响 应客户。这些公司的最终目标是在它们所 进入的各主要市场建立生产设施。
3
设施决策的组成
作用:对于生产设施,厂商必须决定它们是柔性 的还是专用的,或者是二者相结合。 选址布局:公司决定在何处建造设施的决策构成 了供应链设计的大部分内容,其中最基本的问题 是:决定是为了获得规模经济而集中布局,还是 为了更靠近消费者、提高响应性而分散布局。公 司也必须考虑与设施所在地的各种特征相关的一 些问题,包括:宏观经济因素、劳动力素质、劳 动力成本、设施成本、基础设施情况、是否接近 消费者、该公司其他设施的布局、税收效应和其 他战略因素。
第三章 一阶系统的时间响应
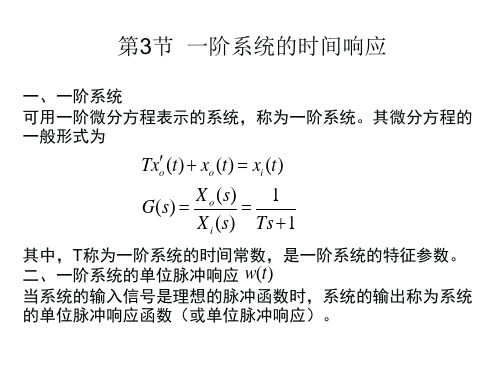
微 分
一阶系统对典型输入信号的响应
输入信号 时域 输入信号 频域 输出响应
微 分
传递函数
(t )
1
1 S 1 S2
1 T e T
t
(t 0)
1(t) t
1 2 t 2
1 e
t T
t 0
t T
t T Te
t 0
t T
1 S3
1 2 t Tt T 2 (1 e 2
t 0
1 T
一阶系统的单位函数响 应函数是一个递增的指 数函数。
一阶系统的时间常数不同,其单位阶跃响应曲线上 升的速度不同,时间常数越大,上升越慢(惯性越 大),反之,依然。
一阶系统过渡过程: •一阶系统的单位阶跃响应曲线从初值上升到稳态值的98%或 稳态值的95%所经历的过程。 过渡过程时间(调整时间): •一阶系统的单位响应曲线从初值上升到稳态值的98%或稳态 值的95%所经历的时间。 •当⊿取2%时,一阶系统过渡过程时间约为4T。
应用这个结论,在实验建模时,我们只要测到系统的单位脉冲 响函数,然后,对其进行Laplace变换就可以求得系统的传递 函数.这对于所有的线性定常系统都适用.
应用这个结论,在实验建模时,我们只要测到系统的单位脉冲 响函数,然后,对其进行Laplace变换就可以求得系统的传递 函数.这对于所有的线性定常系统都适用.
X o (s) n2 G (s) 2 2 X i ( s ) s 2 n s n
式中, n 称为二阶系统的无阻尼固有频率;
称为系统的阻尼比。 n,是二阶系统的特征参数,表明了
二阶系统与外界无关的特性。
系统的特征方程为
2 s 2 2 n s n 0
第三人称单数变化规则(共5张PPT)

(he,she,it,人名),句中的动词要用第三 b单u数ys形so式m,e 变toy一s,般g疑ets问u句p 就c用omDoe引s b导ac。k home
+es : watches TV brushes his teeth goes to bed goes to school does my homework does some reading
y→ i+ es: fly → flies
study →studies
不规则变化:have-----has
第2页,共5页。
动2、词以第s三, x人, s称h,单ch数, 接的尾变的化动规词则:+es beugysinsohmisectloaysss, ,geptrsacutpisescothmeepsiabnaock home
人称单数。 4动、词以第辅三音人+称y接单尾数的的动变词化:规变则y:为i+es
d动o词esbme遇y h到o主me语w是or第k 一人do称es时s,ombe改re为adainmg,遇到主语是第二人称单数时,be改为are,遇到主语是第三人称单数时,be改为is. H1、e/直Sh接e在is动go词od后a+ts.
一般现在时的定义:表示通常性,规律性, 习惯性的状态或者动作(有时间规律发生的 动作)的一种时间状态。
b+es:gPinlsayhsis, scklaipsss, ,sipnrgasc,tgisievesst,hsetapriatsn,olikes,
• 在一般现在时中,当主语是第三人称单数时 以辅元音字母加y结尾的动词+,s把. y变为i,再+es.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
P13
C
1
P14 P24 P34 P24
3
潘 海 兵
D
4
潘 海 兵
14
潘海兵
潘海兵
五.瞬心法小结
潘 海 兵
1)仅适用于求解速度问题,不可用于加速度 分析。 2)适用于构件数较少的机构的速度分析。 (多构件导致瞬心数量过多,分析复杂) 3)瞬心法 属于图解法,每次只分析一个位置, 对于机构整个运动循环的速度分析,工作量很 潘 大。 海
M
t
2 p12 M
1 2
2 P12 A (P12) n §3-2 速度瞬心及其在平面机构速度分析中的应用 P
12
(1)若两构件1、2以转动副相联结,则瞬心P12位于转动副的中心; (2)若两构件1、2以移动副相联结,则瞬心P12位于垂直于导路线 方向的无穷远处; 潘 ( 潘 3)若两构件1、2以高副相联结。
xp -l1 sinθ vpx vpy = yp = l1 cosθ
潘 海 兵
1 1
-a sinθ 2-b sin (90º +θ a cosθ 2+b cos (90º +θ
2 2
) )
ω1
ω2
速度合成: vp =
v2px + v2py
α
-1(v / v ) = tg pv py px
潘 海 兵
19
n
P12 ω 2
1 2
VP23=μ l(P23P12)· ω2
VP23=μ l(P23P13)· ω3
潘 海 兵
ω3 3 P23
P13 n
∴ω 3=ω 2· (P13P23/P12P23) 方向: 与ω 2相反。
9
VP23
相对瞬心位于两绝对瞬心之间,两构件转向相反。
潘 海 兵
潘海兵
潘海兵
例 如图所示铰链四杆机构,若已知各杆长以及图示 瞬时位置点B的速度VB,求点C的速度VC和构件2的 角速度2及构件1、3的角速比1/ 3。
P45
潘 海 兵
潘 海 兵
12
潘海兵
潘海兵
[例]求齿轮机构传动比i23。 解: 1) K N ( N 1) 3(3 1) 3 2 2 2)求出P12 、 P13 、 P23 §3-2 速度瞬心及其在平面机构速度分析中的应用 P23位于P12与P13连线上,为公法 线n-n与齿轮连心线交点。 P23
vAiAj §3-2 速度瞬心及其在平面机构速度分析中的应用 B 作两重合点相对速度的垂线, A vBiBj 其交点就是构件i、j的瞬心Pij。
i
潘 海 兵
Pij
j
潘 海 兵
5
潘海兵
潘海兵
2、两构件直接用运动副连接(Two links connected by a kinematic pair)
A 1 1 B 2 t 1 n
潘海兵
潘海兵
4)加速度分析
l2 sinθ l2 cosθ
2 2
对速度方程求导: ω 2 - l3 sinθ 3 ω 3 =ω 1 l1 sinθ ω 2 - l3 cosθ α α
3
1 1
ω 3 =-ω 1 l1 cosθ
将上式对时间求导得以下矩阵方程: - l2 sinθ l2 cosθ
2 2
l3 sinθ - l3 cosθ
3 θ D
x
3
矢量方程向x、y轴投影 l2 cosθ 2 - l3 cosθ l2 sinθ
潘 海 兵
3 3
= l4 -l1 cosθ =- l1 sinθ
1
1
2
- l3 sinθ
连杆上P点的坐标为: xp = l1 cosθ 1 +a cosθ yp = l1 sinθ
1
2 2
+ b cos (90º +θ + b sin (90º +θ
潘 海 兵
潘海兵
潘海兵
速度方程的一般表达式: [A]{ω } =ω 1{B} 其中[A]--机构从动件的位置参数矩阵; {ω }--机构从动件的角速度矩阵;
1 1
l2 cosθ 2 ω 2 - l3 cosθ 写成矩阵形式:
- l2 sinθ
潘 海 兵
3
ω 3 =-ω 1 l1 cosθ
l1 sinθ -l1 cosθ
1 1
2
l3 sinθ - l3 cosθ
3 3
ω2 ω3
l2 cosθ
=ω 1
(16)
2
从动件的位置 参数矩阵[A]
从动件的角 速度列阵{ω }
海 兵
在接触点M处作纯滚动,则接触点M就是它们的瞬心。
海 兵
在接触点M处有相对滑动,则瞬心位于过接触点M的公法线
6
潘海兵
潘海兵
3、两构件间没有用运动副直接连接,则可用三心定理来确定其 瞬心位置
证明:(反证法) 取AB连线之外一点C,假设为 P23,构件1、2在C点的速度大小 C 相等,方向不同。 2 3 2 速度瞬心及其在平面机构速度分析中的应用 P12 §3-2 结果,不是。C点应在AB连线 3 P13 上。具体在什么位置,即取决 A B 于构件2、3的角速度。 1
[A]{ω } =ω 1{B}
18
潘 海 兵
原动件的角 速度ω 1
原动件的位置 参数矩阵[B]
潘海兵
潘海兵
对以下P点的位置方程求导: xp = l1 cosθ
1
+a cosθ
2
+ b cos (90º +θ
2
)
yp = l1 sinθ
1
+a sinθ
2
+ b sin (90º +θ
2
)
得P点的速度方程:
vP23 ω2 p12 p23 μl ω3 p23 p13 μl
潘 海 兵
2 p23 p13 i23 3 p12 p23
13
潘 海 兵
潘海兵
潘海兵
[例]求各瞬心
P34→ ∞
P13
2 B
P12 §3-2 速度瞬心及其在平面机构速度分析中的应 1 4 2 3 用 P A P23
3)加速度分析:求机构的惯性力时必须先进行运动分析 §3-1 机构运动分析的目的和方法
3、方法: 图解法
潘 海 兵
图解法 (直观)、 解析法 ( 精确)、实验法 速度瞬心法 矢量方程图解法 解析法
3
复数矢量法 矩阵法
潘 海 兵
潘海兵
潘海兵
§3-2 速度瞬心及其在平面机构速度分析中的应用
一、速度瞬心(Instant Centres)的概念
潘 海 兵
① 能否实现预定位置、轨迹要求; ② 确定行程、运动空间; ③ 是否发生干涉; ④ 确定外壳尺寸。
2
潘 海 兵
潘海兵
潘海兵
2)速度分析: (如,工作行程是否达到匀速等)
① 加速度分析及确定机器动能和功率的基础; ② 了解从动件速度的变化能否满足工作要求;
牛头 刨床
工作行程——接近等速运动; 空回程——急回运动。
xp -l1 sinθ vpx vpy = yp = l1 cosθ
1
-a sinθ 2-b sin (90º +θ
2
)
ω1
1
a cosθ 2+b cos (90º +θ
2
)
ω2
(17)
得以下矩阵方程:
xp -l1 sinθ apx apy = yp = l1 cosθ
1 1
-a sinθ 2-b sin (90º +θ a cosθ 2+b cos (90º +θ
n
3 2
潘 海 兵
K P23 2 P13
关键:找出已知运动构件 和待求运动构件的相对瞬 心和它们的绝对瞬心
P12
1
n
8
v3 2 p12 p23 l
潘 海 兵
潘海兵
潘海兵
2.求角速度 已知构件2的转速ω 2,求构件3的角速度ω 3 。 解: 用三心定律求出P23 。
求瞬心P23的速度 :
2
2 2
) 0 ) α2
l1 cosθ 1 a cosθ - -l1 sinθ 1 -a sinθ
潘加速度合成: 海 ap 兵
+ b cos (90º +θ +θ 2 + b sin (90º α
2 2
) )
ω 22 (19) 2 ω3
=
a2px + a2py
21
-1(a / a ) = tg pa py px
速度瞬心——两构件作相对运动时, B 其相对速度为零时的重合点称为速度 A v BiBj 瞬心,简称瞬心。也就是两构件在该 ij 瞬时具有相同绝对速度的重合点。 i §3-2 速度瞬心及其在平面机构速度分析中的应用 因此,两构件在任一瞬时的相对 Pij j 运动都可看成绕瞬心的相对运动。 绝对瞬心:两构件之一是静止构件 相对瞬心:两构件都运动的。
P14、P24、P34是绝对瞬心 P12、P23、P13是相对瞬心
10
潘 海 兵
潘海兵
潘海兵
[例]如图所示的带有一移动副的平面四杆机构中, 已知原动件2以 角速度w2等速度转动, 现需确定机构在图示位置时从动件4的 速度v4。 解:确定机构瞬心如图所示
v v P 24 2 P12 P24 l
2
2
)
潘 海 兵
+a sinθ
17
)
潘海兵
3)速度分析 将以下位置方程: l2 cosθ 2 - l3 cosθ
潘海兵