S120控制单元cu320 调试纪录
S120调试总结

西门子S120(5#桥)调试总结整理人:韦同旺一..Drive-CLIQ电缆连接方式:如图1中为CU320与主起1#,主起2#,小车的Motor Module的Drive-CLiQ的连接方式如图2 中为CU320与大车变频器的连接方式Drive-CLiQ连接方式有两种:一种是串联方式(站点比较多的时候运用,但一个网口最多能够串联8个部件),一种为并联方式(上图使用的就是并联方式)备注:ALM的Drive-CLiQ以连接完成。
二.编码器的接线1.编码器采用的是HID100H Incremental编码器端接线方式为: Brown----------------Vcc DC24V正极White-----------------0V DC 负极Green-----------------A+ 信号线A+Yellow----------------B+ 信号线B+SMC30端接线方式为: X521端子号1 -----------A+ 信号线A+X521端子号3-----------B+ 信号线B+X531端子号1------------Vcc DC24V正极X531端子号2------------0V DC 负极三.ALM接线1.检查ALM接线若内部没有给预充电K4供电时,需外供AC 220V电源若内部没有风机供电电源时,需外供AC 220V电源若内部没有供DC 24V电源时,需外供DC 24V电源四.通讯及逆变器是否正常1.硬件组态下载到PLC中,打开STARTER软件,新建一个项目,首先使用网线使CU320与电脑进行连接。
在组态中,点击自动搜索后,会自动完成对CU320的搜索,完成后把项目上传到电脑中。
根据硬件组态中的地址进行设置并对CU320上的地址进行设置(STARTER 中会显示设置的方式)。
在硬件组态中查看通讯是否正常,正常时各CU320上DP指示灯常亮。
2.当DC24V送电后,检查各逆变器模块的指示灯,若显示红灯时则模块不正常。
S120 调试指导
6. 整流装置的相关参数设置,设置完成后点击 Next。
1
1
2
3
3
图 2-7 基本整流装置参数设置(装机装柜型左侧/书本型右侧)
⑴ 设置实际的进线连接电压; ⑵ 选择整流装置是否并联(仅支持装机装柜型模块)及设置并联装置数量; ⑶ 外部制动单元设置,激活后制动单元受整流装置监控。
2
调试流程
S120 的简单调试流程如下图所示:
图 2-1 简单调试流程
说明 S1: 针对共母线结构的多传动设备,整流装置的预充电能力限定了整个共母线 系统的总电容量,在选型样本中可以查到整流装置自身的电容量和允许的最大 电容量以及其它共母线模块的电容量;
S2: 在进行配置之前,我们需要知道驱动器,CU 类型,CF 卡固件版本,电机和 编码器数据。
电缆需按要求的力矩固定在端子上,电机电缆不能超出允许的最大长度, 该长度因电缆类型(是否屏蔽)而异;
制动单元到制动电阻的连接电缆不能超出允许的最大长度,制动电阻的热 触点信号需要连接到 CU 或控制器上;
对于装机装柜设备,当并联应用驱动单绕组电机时,确保电机电缆不小于最 小长度或配备输出电抗器;
S3: S120 支持用基本操作面板 BOP20,高级操作面板 AOP30 及调试软件 STARTER(推荐使用)三种工具进行调试。
面板调试:先进行工厂复位,然后进行快速调试,保存数据;
软件调试:首次在线后先进行工厂复位,可以在线自动配置或离线手 动配置,配置完成后下载并保存数据;
S4: 上电前检查
说明 20kw 和 40kw 的 BLM 内部集成有制动单元。
7. 选择通信报文类型,此处也可以不做设置而之后在“Communication”中进行通信 配置,单击 Next。
S120变频器的调试方法及故障处理(工程师培训)

S120变频器的调试方法及故障处理(工程师培训)结合STARTER软件进行S120的参数设置(调试过程和调试步骤)(一) 变频器的安装就位 (1)(二) 变频器的上电检查工作 (1)(三)变频器的上电 (2)(四)变频器的调试 (2)(一) 变频器的安装就位1、变频器柜体出厂前测试好,所有的说明书合格证以及需要到现场安装的设备或备件都装好,并出具详细的装箱清单。
2、运输过程中,注意防雨,防碰,防倾倒3、运到现场,先查验装箱清单,验货。
从车上把柜体运输到配电室注意防雨,防碰,防震动。
4、变频器就位,穿母排,注意把变频器上部用塑料布或其他封住,防止掉落进铜丝、电线、螺栓、垫片等(因为上部一般都用来散热,敞口)(二) 变频器的上电检查工作第1步:我们先看变频器有没有损坏或碰坏的痕迹,看电气元器件型号和设计原理图上是否一致,确保要一样。
要么是供货不对,要么是原理图不对。
总之“确保实物和设计原理图型号一致”。
第2步:把变频器柜内的干燥剂、塑料(减震防碰的材料)通通拿走;第3步:检查变频器的主回路连接包括变频器的进线,变频器的出线,制动单元,制动电阻,电机的接线。
做到:使用万用表欧姆档验证接线正确;使用螺丝刀验证接线端子紧固;确保变频器进线“相与相无短路”、“相与地无接地”情况发生。
“制动单元的进线极性正确”、“制动单元的出线没有接地,并且阻值和制动电阻一样。
使用万用表测量电机三相绕组无断路,正常值U2-V2、V2-W2、U2-W2在零点几欧姆。
第4步: 检查变频器的控制回路,做到接线紧固,正确,确保没有短路,接地发生。
第5步:检查电机接线,测量电机绝缘,保证电机能够转动。
确保无接地、断路、短路情况发生。
第6步:检查变频器的接地情况,电机的接地情况。
第7步:考虑到电机要做优化,提前通知甲方脱开负载,并现场亲自确认。
以上工作都要做到位,并填写上电前的工作内容和测量表。
(三)变频器的上电1 先测量变频器的进线断路器的进线电压相序正确,三相电压值正确(符合变频器的输入范围),三相电压平衡。
S120控制单元cu320 调试纪录
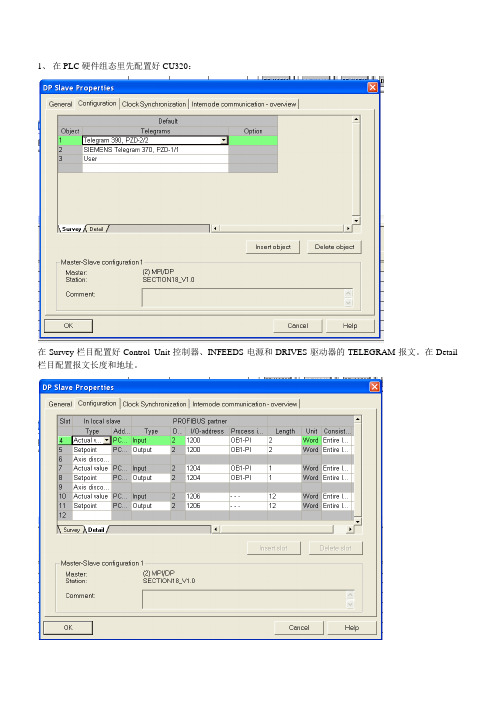
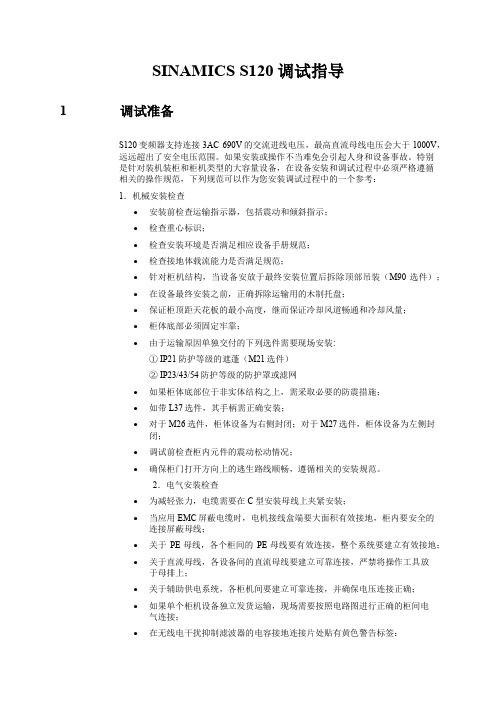
1、在PLC硬件组态里先配置好CU320:在Survey栏目配置好Control Unit控制器、INFEEDS电源和DRIVES驱动器的TELEGRAM报文。
在Detail 栏目配置报文长度和地址。
2、配置完成后编译并保存,在Step7中会自动生成一个伺服配置:3、双击在STARTER中打开所配置的伺服,选择ONLINE,在线前需要将CU320的DP拨码设置成和硬件组态中定义的一致。
4、在线后左边栏目中会出现AutoConfiguration选项,点击后选择Servo后会自动生成一个基本配置(包括Control Unit控制器、INFEEDS电源和DRIVES驱动器,参数是自动读取上来的),首先需要对INFEEDS 和DRIVES配置CONFIGURATION(默认既可):5、然后根据实际项目需要可能需要更改INFEEDS和DRIVES中的一些参数EXPERT—-EXPERT LIST: INFEEDS: P10 –0 READY;1—QUICK COMMISSIONING(修改某些参数时需要在1状态,修改完成后需要改为0), P210 Drive unit line supply voltage驱动器实际供电电压可能和选型不一致。
DRIVES: Change parameter p1821 if need to change direction,p2571 for max speed, p2572 for acceleration adjust,p2573 for deceleration adjust,p2585 jog speed如果采用手动方式,需要在Configure drive unit窗口中逐步配置,并修改以上的参数。
6、报文配置(包括控制器、电源和驱动器):COMMUNICATION--PROFIBUS7、配置结束后再执行一次DOWNLOAD到PG和ROM。
8、基本控制JOG方式:COMMISSIONING – CONTROL PANEL(必须在ONLINE)9、设置原点:在HOMING弹出界面中按照需要的方式设置,设置完成后可以看到REFERENCE POINT SET左边状态灯变成绿色。
通过S120变频器实现高炉探尺的精准控制

通过S120变频器实现高炉探尺的精准控制1 背景机械探尺是高炉冶炼时用来检测高炉内部物料料面深度的关键设备,探尺的可靠运行是高炉顺利运行的前提和保障。
它是炼铁高炉上料系统的重要组成部分,主要用于检测炉内物料的深度,当下完一批料,探尺自零位自动下放,下放至炉内料面后,探尺被物料支撑,其速度减至零,但不能出现倒尺或埋尺,然后在冶炼进程中要跟随料面下降,当探尺下放到设定深度时,自动提升到零位。
如此往复,检测深度,以供操作人员设定矿石与焦炭等物料的布料角度、以及圈数。
2 机械探尺的工作原理机械探尺设备装置多为链条式结构,主要由电机、卷筒、链条、重锤及电气控制系统组成,将链条固定于卷筒上,链条下端挂上重锤,链条和重锤深入高炉内部,通过电机驱动控制重锤的上升的下降。
在实际工作中它有三种工作方式:提尺、放尺、料面跟随,根据工艺必须满足以下要求:1)提尺快速、稳定,在达到零位时必须可靠、准确停尺。
2)放尺要匀速,不能出现卡顿和惯性冲尺现象。
3)料面跟随要灵活,不能出现卡尺、倒尺、埋尺,造成链条断和重锤烧损。
2.1 提尺的力矩关系探尺向上提尺时,变频器为纯速度控制控模式,此时电机的运行方向和重锤的运行方向相同,但是电机的力矩Md与探尺重锤的重量Mg探尺链条的重量M1摩擦力矩Mz的力矩相反如图1 所示,电机力矩关系为:2.2 探尺放尺的力矩关系探尺放尺是利用重锤与链条的自身重量来进行一定的传动,此时变频器处于速度闭环控制状态,在Md的调节下,重锤以恒速V 下落,此时电机驱动力矩与探尺重锤及链条的重力力矩方向相反,运行方向与重锤运动方向相同,力矩关系为:2.3 探尺料面跟随的力矩关系探尺在匀速下放的过程中,当重锤触及料面时,电机转矩会突然变小。
变频器自动切换到力矩控制。
跟尺时探尺锤头受到料面的支撑,重锤的重量Mg消失,在料面下降。
支撑力消失时重锤的重量Mg出现,为保证测量料面的准确性,要求重锤立于料面而不倒,电机要产生保持向上的张力Md拉住重锤而不出现倒锤。
SINAMICS S120 调试手册
SINAMICS S120 调试手册目录SINAMICS S120 调试手册 (1)第一章 S120产品介绍 (4)第二章项目组态与调试 (10)2.1调试软件介绍 (10)2.2S120硬件组态 (10)2.3S TARTER项目列表 (18)第三章电机优化 (33)3.1S120驱动感应电机的优化 (33)3.2S120驱动第三方伺服电机时的优化 (36)第四章 S120的基本定位 (37)4.1激活基本定位功能 (38)4.2基本定位_点动(JOG) (40)4.3基本定位_回零(H OMING /R EFERENCE) (41)4.4基本定位_限位(L IMIT) (46)4.5基本定位_程序步(T RAVERSING B LOCKS) (47)4.6手动数据输入(MDI) (48)第五章通讯 (51)5.1S120与PG/PC的串口 (51)5.2S120与TP170 (52)5.3S120、TP170B与S7200的联接 (56)5.4通过DP总线实现S7-300与SINAMICS S120通讯 (61)5.5用DP总线对电机起、停及速度控制 (76)5.6驱动器参数的读取及写入 (78)5.7S120的“从对从”方式(S LAVE - TO -S LAVE) (86)5.7.1通过Slave to Slave 方式实现各从站之间通讯 (86)5.7.2 Slave-to-slave 功能配置: (87)5.7.3 从站参数配置 (88)5.7.4激活Slave to Slave 功能 (89)第六章 S120 DCC功能 (90)第七章自由功能块 (97)第八章 SINAMICS S120 参数简介 (98)第九章 S120的故障与报警 (101)相关参考手册 (102)IA&DT Service & Support Page 3-104第一章 S120产品介绍Sinamics S120集矢量控制与伺服控制于一身,分为DC-AC与AC-AC两种类型,所谓DC-AC,是指控制单元、整流、逆变都为独立模块,目前DC-AC类型功率范围从0.9kw到1200kw,AC-AC模块由控制单元和功率模块组成,功率范围从0.12到250kw。
博途软件怎么调试S120
基于博途V15的S120调试
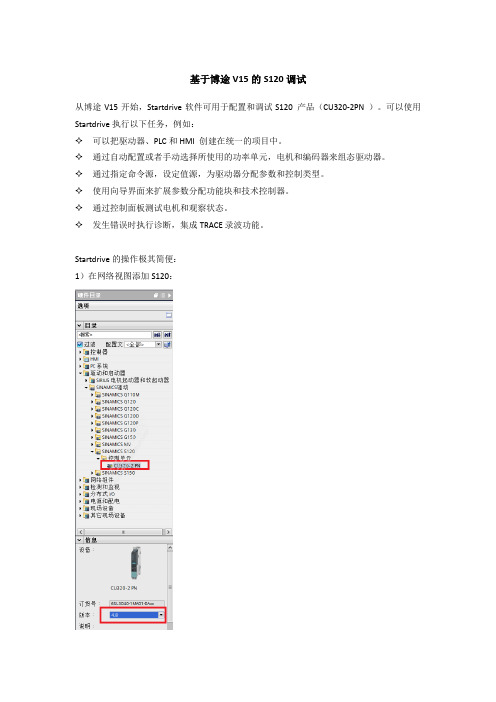
从博途V15开始,Startdrive软件可用于配置和调试S120 产品(CU320-2PN )。
可以使用Startdrive执行以下任务,例如:
✧可以把驱动器、PLC和HMI 创建在统一的项目中。
✧通过自动配置或者手动选择所使用的功率单元,电机和编码器来组态驱动器。
✧通过指定命令源,设定值源,为驱动器分配参数和控制类型。
✧使用向导界面来扩展参数分配功能块和技术控制器。
✧通过控制面板测试电机和观察状态。
✧发生错误时执行诊断,集成TRACE录波功能。
Startdrive的操作极其简便:
1)在网络视图添加S120:
2)在添加的控制单元上点击右键,选择“设备配置检测”:
3)自动识别DRIVE-CLiQ上的所有设备,可以创建伺服或者矢量控制对象:
4)选择没有自动识别的电机(没有DRIVE-CLiQ接口):
5)配置通信报文:
6)优化并且测试电机,完成配置:
技成培训网整理发布
如果对您有帮助,请下载惠存。
西门子S120调试
4、 选择无滤波器 选择无滤波器
5、选择高负载矢量驱动 6、选择电机类型为感应电动机 7、输入电机铭牌数据,冷却方式为强制风冷(可用默认)
8、默认 计算数据 9、电机不带抱闸
10、选编码器 无编码器
有编码器
点 der 配置编码器 OK 后变成自定义
11、标准矢量控制 及电机识别先不做以防报警 后作 12、逆变器报文
CU320 报文修改
点 INTELCONN….
查看编码器曲线
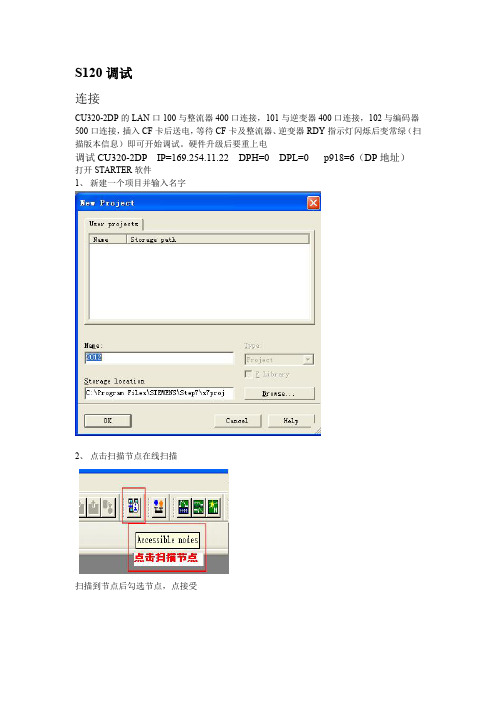
打开 STARTER 软件 1、 新建一个项目并输入名字
2、 点击扫描节点在线扫描
扫描到节点后勾选节点,点接受
左侧菜单树出现装置 DRIVE 后关闭扫描窗口
3、 在线读取装置 点 connect to selected starget devices 读出,LOAD TO PG 。左侧装置前变绿后关闭
选择型号
选择电压
选择报文 NEXT>FINISH 完成
屏蔽通讯中断报警信息选取 EXPERT LIST 将 P2118.0=1910 P2119.0=3
8、选取逆变单元 DRIVES/VECTOR 03 变灰,出现控装置配置窗口, 点 CONGIGURE DDS 进行配置
1、选择有编码器矢量控制模式 21 无编码器矢量 20 V/F 模式 0
创建完成后点击离线 GO OFFLINE 离线修改参数
6、配置控制单元 1、选去控制单元 CONTROL UNIT 变灰,出现控制单元装置配置窗口,点 WIZARD 进行配置
选择插件 NO OPTION MODULE >NEXT>选择报文 999 自由报文 NEXT>FINISH 完成
2、定义 CU320 输入输出端子及屏蔽报警信息 选取 IN/OUTPUTS 定义启动整流器端子 X132-1/DI4
S120调试总结
西门子S120(5#桥)调试总结整理人:韦同旺一..Drive-CLIQ电缆连接方式:如图1中为CU320与主起1#,主起2#,小车的Motor Module的Drive-CLiQ的连接方式如图2 中为CU320与大车变频器的连接方式Drive-CLiQ连接方式有两种:一种是串联方式(站点比较多的时候运用,但一个网口最多能够串联8个部件),一种为并联方式(上图使用的就是并联方式)备注:ALM的Drive-CLiQ以连接完成。
二.编码器的接线1.编码器采用的是HID100H Incremental编码器端接线方式为: Brown----------------Vcc DC24V正极White-----------------0V DC 负极Green-----------------A+ 信号线A+Yellow----------------B+ 信号线B+SMC30端接线方式为: X521端子号1 -----------A+ 信号线A+X521端子号3-----------B+ 信号线B+X531端子号1------------Vcc DC24V正极X531端子号2------------0V DC 负极三.ALM接线1.检查ALM接线若内部没有给预充电K4供电时,需外供AC 220V电源若内部没有风机供电电源时,需外供AC 220V电源若内部没有供DC 24V电源时,需外供DC 24V电源四.通讯及逆变器是否正常1.硬件组态下载到PLC中,打开STARTER软件,新建一个项目,首先使用网线使CU320与电脑进行连接。
在组态中,点击自动搜索后,会自动完成对CU320的搜索,完成后把项目上传到电脑中。
根据硬件组态中的地址进行设置并对CU320上的地址进行设置(STARTER 中会显示设置的方式)。
在硬件组态中查看通讯是否正常,正常时各CU320上DP指示灯常亮。
2.当DC24V送电后,检查各逆变器模块的指示灯,若显示红灯时则模块不正常。
关于S120转矩控制的问题

关于S120转矩控制的问题?楼主2012-12-18 22:02:02给位大侠,请问S120中转矩控制的话,怎么控制转速?我看功能图转速限幅在速度控制器之前,转矩给定的话(P1503),速度会不会飞车?就像如果是速度控制转矩限幅,完全可以实现转矩限幅起到作用,达到想要的转矩,可是转矩控制我不是很理解引用收藏(2)“点赞”也能得经验值啦!1更多Zane至圣经验值: 19150发帖数: 11597精华帖: 151回复:关于S120转矩控制的问题?1楼2012-12-18 23:06:31这就是力的平衡关系,输出转矩大于阻力矩就加速,小于阻力矩就减速,等于就匀速或静止。
Zane 注册自动化系统工程师Always save before download引用收藏飞华侠士经验值: 1846发帖数: 444精华帖: 2回复:关于S120转矩控制的问题?2楼2012-12-31 23:25:19quote:以下是引用Zane在2012-12-18 23:06:31的发言:这就是力的平衡关系,输出转矩大于阻力矩就加速,小于阻力矩就减速,等于就匀速或静止。
转矩控制时速度无法控制,它时以转矩控制为第一目标,有可能是飞车.它有辅助的速度限制.防止飞车.引用收藏李文华侠圣经验值: 2554发帖数: 654精华帖: 17回复:关于S120转矩控制的问题?3楼2013-01-02 13:37:20quote:以下是引用飞华在2012-12-31 23:25:19的发言:quote:以下是引用Zane在2012-12-18 23:06:31的发言:这就是力的平衡关系,输出转矩大于阻力矩就加速,小于阻力矩就减速,等于就匀速或静止。
转矩控制时速度无法控制,它时以转矩控制为第一目标,有可能是飞车.它有辅助的速度限制.防止飞车.如果转矩设定大于负载转矩,电机的速度将一直上升到接近同步转速(转子不切割磁力线就不会有转矩),那能否在转矩模式下将最大速度或频率限制在额定转速以下的某个值?如何限制?引用收藏李文华侠圣经验值: 2554发帖数: 654精华帖: 17回复:关于S120转矩控制的问题?4楼2013-01-02 13:59:18我现在的理解是:如果将变频器输出的最高频率(如MM440的P1082)限制在30Hz,那么此时电机的同步转速就是30Hz对应的那个值,虽然给定转矩大于负载转矩,由于是异步电动机,这时的电机速度不可能超过30Hz对应的这个同步转速值(激活滑差补偿功能除外),但不能调速。
S120调试手册

S120 培训手册1. 硬件1.1伺服系统的基本构成如上图所示,一个基本的S120伺服系统由以下几部分组成:用于系统控制的中心控制单元,用于供电的电源块,用于驱动伺服电机的电机模块以及连接各个模块的DRIVE-CLIQ接口系统。
下面,我们分别来对这些单元来作简单介绍。
1.2中心控制单元 CU320控制单元 CU320-2 PN 是一个中央控制模块,可实现对单个或多个电源模块和/或电机模块的开环和闭环控制功能。
接口说明X100 - X103 DRIVE-CLiQ 接口DRIVE-CLIQ接口用于S120系统内部模块的连接,在我们的项目中,使用西门子DRIVE-CLIQ电缆将CU320上的X100口与电机模块上的X200口相连接。
X122 数字量输入/输出接口在本项目中,只使用了X122的第1个输入端子,作为伺服电机的急停使用。
连接的7、8号端子,作为参考电位,只有在连接参考电位的情况下,数字输入才可以工作。
X132 数字量输入/输出项目中,出于这个输入输出,并没有使用有意义的输入或输出信号,只是连接了7、8号电子电位,留作备用。
X124 电源此端子为CU320的电源端子,连接DC 24V电源及参考电位。
X150 P1 / P2 PROFINET接口PROFINET接口用于与PLC进行数据传输,此处我们使用X150 P1连接至我们的交换机上。
另外,两个 PROFINET 接口各有一个绿色和一个黄色的 LED 用于诊断。
LED 可显示下列状态信息:存储卡注意1:在运行期间插拔存储卡会导致设备停止的危险。
如果在运行期间插拔存储卡,可导致数据丢失并有可能引起设备停止。
•仅在控制单元断电状态下才可插拔存储卡。
•只允许按照上图所示插入存储卡(箭头在上方朝右指)注意2:连同存储卡一起寄出控制单元会导致数据丢失危险在寄回损坏的控制单元时,存储卡上已有的数据信息(参数、固件、授权等)在维修和测试期间有可能丢失。
•不要将存储卡一同寄出,而应保管好存储卡,供新设备使用。
2024西门子S120驱动器入门教程CU320

西门子S120驱动器入门教程CU320•驱动器简介与基本概念•硬件安装与接线指导•软件配置与参数设置详解•运动控制功能实现目•维护与保养建议•总结与展望录01驱动器简介与基本概念它提供了广泛的功率范围和模块化设计,可灵活适应不同的机械和控制需求。
S120驱动器采用了先进的控制算法,确保了精确、快速和稳定的运动控制。
西门子S120是一款高性能的驱动器,专为满足现代工业应用而设计。
西门子S120驱动器概述CU320是S120驱动器的控制单元,负责驱动器的控制和通信任务。
它具有强大的处理能力和丰富的接口,可连接多种编码器和传感器。
CU320还支持多种控制模式,包括速度控制、位置控制和力矩控制等。
CU320控制单元特点西门子S120驱动器广泛应用于机械制造、印刷、包装、纺织等领域。
其主要优势在于高精度控制、快速响应、高可靠性和易于维护等方面。
此外,S120驱动器还支持多种现场总线协议,方便与上位机或PLC进行通信。
应用领域及优势分析驱动器控制单元编码器传感器相关术语解释一种电力电子设备,用于控制电机的速度、位置和力矩等参数。
一种测量装置,用于检测电机的位置和速度等参数。
驱动器的核心部件,负责处理控制信号和通信任务。
一种检测装置,用于检测电机的电流、电压、温度等状态参数。
02硬件安装与接线指导西门子S120驱动器CU320外观紧凑,结构坚固,适应各种工业环境。
接口丰富,包括电源接口、编码器接口、通讯接口等,满足各种连接需求。
驱动器面板上配有LED显示屏和按键,方便用户进行参数设置和故障诊断。
驱动器外观及接口介绍电源连接注意事项确保电源电压与驱动器额定电压相匹配,避免过压或欠压对驱动器造成损坏。
电源线应使用符合规格的电缆,并确保接线牢固、可靠。
对于大功率驱动器,应考虑电源线的线径和长度,以减小压降和温升。
编码器电缆连接方法01编码器电缆应使用屏蔽电缆,以减小电磁干扰对编码器信号的影响。
02电缆长度不宜过长,一般不超过50米,以减小信号衰减和干扰。
S120调试个人记录[整理]
![S120调试个人记录[整理]](https://img.taocdn.com/s3/m/3df87411e97101f69e3143323968011ca300f785.png)
S120调试个人记录首先安装STA TR软件,(软件要在S7-5.5基础上安装)安装TOOLBO X,在plc硬件组态完成后,进入START软件1 清零:-----先在线--------再清零2 搜寻节点:--- 169.254.11.22选择S70NLINE或device根据情况而定。
PG/PC选择当前笔记本的网卡形式IP设置完成以后点击3 连接目标驱动:Project/connect to selected target device若出现这个警告说明没连接上,解决方法是点击选择Device方式尝试一下。
检查网线,检查IP设置。
(注:改变连接方式时要保证跟commiss interfac e 的一致)4 查看是否连接到伺服:点击5 把项目上传到PC,:点击Automatic configation create6 伺服轴配置:点击伺服轴部分,连续Next是否带包扎设置设置成1或设置成外部接线(目的是通知CU320Next选择110报文,然后点击完成各个伺服轴都按照以上6的步骤设置7 设置报文选择自由报文修改完成后点击进入控制字,状态字设置画面,根据PLC UDT999的定义设置就好。
问题1:当硬件地址设定与报文设定一致,但报文出现问号时,点击报文画面右下角的set up address ,但必须是硬件组态处于关闭状态,要不不能点击。
8 绝对值原点的设置:进入Basic positioner ,→homing9 加速度的设定:参数设置1120在跑MDI 方式时需要设定2644,2645这两个参数10 正反转设定:一旦电机方向反了,改正1821,变成0或1.改前先改p10改成3,然后再改过来。
控制字的个数。
(可以再硬件组态中改)想改就不能是对号的,要在叹号下才能改。
11 螺距改动:在Mechanics 中改12 限位的设置:硬极限的设定也可以改变开闭点。
西门子S120调试

S120调试连接CU320-2DP的LAN口100与整流器400口连接,101与逆变器400口连接,102与编码器500口连接,插入CF卡后送电,等待CF卡及整流器、逆变器RDY指示灯闪烁后变常绿(扫描版本信息)即可开始调试。
硬件升级后要重上电调试CU320-2DP IP=169.254.11.22 DPH=0 DPL=0 p918=6(DP地址)打开STARTER软件1、新建一个项目并输入名字2、点击扫描节点在线扫描扫描到节点后勾选节点,点接受左侧菜单树出现装置DRIVE后关闭扫描窗口3、在线读取装置点connect to selected starget devices读出,LOAD TO PG 。
左侧装置前变绿后关闭4、选中左侧装置Drive unit变灰后点Restere factory settings 恢复工厂设定后点OK5、点左侧Automatic configuration 自动配置组态→First configuration→configuration start→选择Vector 矢量→create创造创建完成后点击离线GO OFFLINE离线修改参数6、配置控制单元1、选去控制单元CONTROL UNIT变灰,出现控制单元装置配置窗口,点WIZARD进行配置选择插件NO OPTION MODULE >NEXT>选择报文999自由报文NEXT>FINISH完成2、定义CU320输入输出端子及屏蔽报警信息选取IN/OUTPUTS定义启动整流器端子X132-1/DI4定义逆变器报警端子X122-9/DO8选取R2139 BIT3 FAULT 定义整流器报警端子X132-9/DO8选取R2139 BIT3 FAULT屏蔽通讯中断报警信息选取EXPERT LIST将P2118.0=1910 P2119.0=37、选取整流单元INFEED/S INF02变灰,出现控装置配置窗口,点WIZARD进行配置选择型号选择电压选择报文NEXT>FINISH完成屏蔽通讯中断报警信息选取EXPERT LIST将P2118.0=1910 P2119.0=38、选取逆变单元DRIVES/VECTOR 03变灰,出现控装置配置窗口,点CONGIGURE DDS进行配置1、选择有编码器矢量控制模式21 无编码器矢量20 V/F模式02、选择逆变器型号4、选择无滤波器选择无滤波器5、选择高负载矢量驱动6、选择电机类型为感应电动机7、输入电机铭牌数据,冷却方式为强制风冷(可用默认)8、默认计算数据9、电机不带抱闸10、选编码器无编码器有编码器点der配置编码器OK后变成自定义11、标准矢量控制及电机识别先不做以防报警后作12、逆变器报文13、修改加减速时间和最高速度NEXT>FINISH完成屏蔽通讯中断报警信息选取EXPERT LIST将P2118.0=1910 P2119.0=39、报文排序选取MESSAGE FRAM CONFIGUATION用下箭头将CONTROL/S INT报文下移到WITHOUT PZDS下P1200=1 转速跟踪P1110=1 禁止反转显示基准频率P2000=1000(6级电机)750(8级电机点击励磁时间P346=3 电机大时减至1 提高从0速启动时间10、以上配置完成后编译保存11、在线连接点击在线后进行下装load project totarget system 点击Yes12、在线下装完成保存至CF卡13、电机优化1、进入Drives目录下commissioning目录下stationary/turning,2、选择stationary→Activate对电机进行静态优化。
S120变频器调试

S120变频器调试一、新建文件及设置通讯方式1、新建文件:点project(项目)→New(新建)→输入文件名→确定2、设置通讯方式:Options(选项)→Set PG/PC interface(设置编程器/PC接口)3、选择接口参数:TCP/IP Intel(R) 82579LM→点属性4、点网络属性5、双击本地连接→点属性6、选择TCP/IP协议→点属性7、输入IP地址,子网掩码→点确定二、不带编码器手动组态1、方式一:双击Insert single drive unit(插入驱动装置)→选控制单元型号→CF卡版本号4.5→通讯方式IP→OK2、方式二:自动读取驱动装置:点击Accessible nodes(可访问节点) →钩选Accessible nodes→点Accept(接受)→Close3、双击Configure drive unit(配置驱动单元)→选择驱动类型Vector(矢量)→Next→Next4、选择功率单元型号→Next→Next→Nextmotor(rotating)感应电机(旋转)→Next6、输入电机参数→Next→Next→Next→Next7、电机识别选:〔0〕Inhibited(不识别)→Next8、报文选择:端子控制为默认设置(999)Free telegram configuration with BICO(通过BICO进行自由报文配置),通讯控制选(1)Standard telegram 1,PZD-2/2(标准报文1,PZD-2/2)→Next→Next9、点Finish(完成)10、选中S120_CU310_2_DP→点在线→钩上S120_CU310_2_DP→OK11、下载程序:点Download(下载)→YES→Close三、带编码器自动项目组态1、自动读取驱动装置:点击Accessible nodes(可访问节点) →钩选Accessible nodes→点Accept(接受)→Close2、点击Drive_unit_1→点在线→Connect to assigned devices(连接到指定的设备)→Close3、点Restore factory settings(恢复出厂设置)→YES4、双击Automatic Configuration(自动配置)→点击Start(自动组态)5、选择Vector矢量→→Close6、点GO OFFLINE(离线)7、点Configuration(配置)→点Configure DDS(配置DDS)→修改配置参数8、选择(21)Speed control带编码器矢量控制→Next→Next→Next→Next→Next8、输入电机参数→去掉电机辅助数据与等效数据2个钩→Next→Next9、修改编码器参数:选1024 HTL A/B 3005→Next10、电机识别选:〔0〕Inhibited(不识别)→Next→Next→Next→Finish(完成)7、点保存→点击Drive_unit_1→点在线→点下载→点YES1、STARTER面板控制:双击Control panel(控制面板)2、点Assume Control Priority(获取控制权)→点Accept(接受)3、钩选Enables(激活使能信号)→输入转速n=1500→点绿色Drive On(启动按钮) →转速0%—200%可调→点红色Drive OFF(停止按钮)→点黄色Give up control ptiority(取消控制权)→YES4、静态辩识和动态辩识:missioning(调试)→Stationary/turning measurement(静态/动态辩识) →Meas type里面选择如下Stationary measurement (静态辩识) 不带负载Turning measurement during encoder less operation(不带编码器动态辩识) 不带负载Turning measurement with encoder(带编码器动态辩识) 不带负载Speed controller optremrezatreon for sensor lell operation(不带编码器速度环优化) 带负载Speed controller optremrezatreon with sensor(带编码器速度环优化) 带负载→Activate measurement(激活辩识)→Close5、Control panel(控制面板) →点Assume Control Priority(获取控制权)→点Accept(接受) →钩选Enables(激活使能信号)→点绿色Drive On(启动按钮)→Status:Nomeasurement静态辩识完成。
S120调试辅助资料
是的,TTL编码器不能用做同步电机磁极位置的检测。
S120可以自识别电机的磁极位置,而零脉冲可以作为位置校准信号。
对于HTL/TTL 编码器,在每次上电后第一次运行时需要识别一次磁极位置(P1982使能此功能)。
针对不同的电机可能需要尝试不同的磁极识别方法(P1980),及修改识别的相关参数。
之后可正常运行。
如果编码器带0脉冲可以使能精同步功能,也就是每次电机经过0脉冲时变频器对转子的位置进行校正。
之前需要用P1990对0脉冲进行校准。
从使用MM440就与那个自识别的参数P1910=3打交道,今天PASS 了,明天却OVER。
然后想想办法,又PASS。
每当PASS以后,总是很惬意。
但是,总是阶段性的PASS或者OVER。
这不,最近这大热的天,又自识别不了,总是报故障F0041=4,向西门子的技术服务热线寻求帮助,也还是不行。
死活就是P1910=3过不去。
真郁闷。
我需要P1910=3通过,因为我需要的最高工作频率在100-150Hz!要弱磁升速的。
先将系统设置成P1300=0(线性V/F控制),做快速调试,P1910=1。
然后将转速从0.8倍的额定转速开始,直至最高转速,并分别记录四点的电流值和磁通值,然后,再将系统改成P1300=20(SLVC控制),做快速调试,P1910=1。
然后,将那纪录的4点数据填写到相应的磁化曲线参数中去(注意访问级是4)。
最后做P1960=1。
结束手动识别的调试。
“开车”空载试运行,欢呼雀跃。
弱磁以后的运行噪声、振动都很满意。
忽然觉得手动识别磁化曲线更好。
因为它是通过实验的办法确定的额定激磁电流,由实际测出的弱磁电流与电机磁通的关系。
应该说更实际一些,对被控电机建模而言更相符。
玩MM440真的很过瘾耶。
从此以后我再也不会关心P1910=3的结果了。
不论什么结果,我都可以让磁化曲线的识别结果PASS。
使用P1910进行电机识别——注意:测量必须在冷机状态下进行。
还需确保在P0625中已正确输入实际环境温度(工厂设定为20°C),输入环境温度必须在完成快速调试(P3900)之后,执行电机识别之前进行。
S120调试手册

S120 培训手册1. 硬件1.1伺服系统的基本构成如上图所示,一个基本的S120伺服系统由以下几部分组成:用于系统控制的中心控制单元,用于供电的电源块,用于驱动伺服电机的电机模块以及连接各个模块的DRIVE-CLIQ接口系统。
下面,我们分别来对这些单元来作简单介绍。
1.2中心控制单元 CU320控制单元 CU320-2 PN 是一个中央控制模块,可实现对单个或多个电源模块和/或电机模块的开环和闭环控制功能。
接口说明∙X100 - X103 DRIVE-CLiQ 接口DRIVE-CLIQ接口用于S120系统内部模块的连接,在我们的项目中,使用西门子DRIVE-CLIQ 电缆将CU320上的X100口与电机模块上的X200口相连接。
∙X122 数字量输入/输出接口在本项目中,只使用了X122的第1个输入端子,作为伺服电机的急停使用。
连接的7、8号端子,作为参考电位,只有在连接参考电位的情况下,数字输入才可以工作。
∙X132 数字量输入/输出项目中,出于这个输入输出,并没有使用有意义的输入或输出信号,只是连接了7、8号电子电位,留作备用。
∙X124 电源此端子为CU320的电源端子,连接DC 24V电源及参考电位。
∙X150 P1 / P2 PROFINET接口PROFINET接口用于与PLC进行数据传输,此处我们使用X150 P1连接至我们的交换机上。
另外,两个 PROFINET 接口各有一个绿色和一个黄色的 LED 用于诊断。
LED 可显示下列状态信息:∙存储卡注意1:在运行期间插拔存储卡会导致设备停止的危险。
如果在运行期间插拔存储卡,可导致数据丢失并有可能引起设备停止。
•仅在控制单元断电状态下才可插拔存储卡。
•只允许按照上图所示插入存储卡(箭头在上方朝右指)注意2:连同存储卡一起寄出控制单元会导致数据丢失危险在寄回损坏的控制单元时,存储卡上已有的数据信息(参数、固件、授权等)在维修和测试期间有可能丢失。
西门子升级Sinamics S120 CU320-2驱动器控制单元

西门子升级Sinamics S120 CU320-2驱动器控制单元
佚名
【期刊名称】《变频器世界》
【年(卷),期】2010(000)009
【摘要】西门子工业公司最近宣布推出新的Sinamics S120 CU320—2多轴驱动控制单元。
CU320—2增加了轴数和功能,但价格与原先的控制单元相同。
此外,第二代Sinamics控制单元提供一个以太网端口,更多的I/O和控制器到控制器
通信。
【总页数】1页(P30-30)
【正文语种】中文
【中图分类】TN773
【相关文献】
1.西门子SINAMICSS120伺服驱动器在高速堆垛机上的应用 [J], 张军;黄海涛;
2.西门子S120驱动器力矩控制在开卷机上的运用 [J], 何亚福;周生伟;许齐
3.西门子发布SINAMICS CU250S-2控制单元 [J],
4.西门子SINAMICS S120变频器的整流单元及其属性 [J], 刘飘羽
5.SINAMIC S120在横动、卷绕控制单元中的应用 [J], 严冠豪
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、在PLC硬件组态里先配置好CU320:
在Survey栏目配置好ControlUnit控制器、INFEEDS电源和DRIVES驱动器的TELEGRAM报文。
在Detail栏目配置报文长度和地址。
2、配置完成后编译并保存,在Step7中会自动生成一个伺服配置:
3、双击在STARTER中打开所配置的伺服,选择ONLINE,在线前需要将CU320的DP拨码设置成和硬件组态中定义
的一致。
4、在线后左边栏目中会出现AutoConfiguration选项,点击后选择Servo后会自动生成一个基本配置(包括
ControlUnit控制器、INFEEDS电源和DRIVES驱动器,参数是自动读取上来的),首先需要对INFEEDS和DRIVES 配置CONFIGURATION(默认既可):
5、
6和DRIVES中的一些参数EXPERT—-EXPERTLIST:
7、INFEEDS:P10–0READY;1—QUICKCOMMISSIONING(修改某些参数时需要在1状态,修改完成后需要改为
0),P210Driveunitlinesupplyvoltage驱动器实际供电电压可能和选型不一致。
8、DRIVES:Changeparameterp1821ifneedtochangedirection,
p2571formaxspeed,p2572foraccelerationadjust,p2573fordecelerationadjust,p2585jogspeed
如果采用手动方式,需要在Configuredriveunit窗口中逐步配置,并修改以上的参数。
9、报文配置(包括控制器、电源和驱动器):COMMUNICATION--PROFIBUS
10、
11、配置结束后再执行一次DOWNLOAD到PG和ROM。
12、基本控制JOG方式:COMMISSIONING–CONTROLPANEL(必须在ONLINE)
13、
14、设置原点:在HOMING弹出界面中按照需要的方式设置,设置完成后可以看到REFERENCEPOINTSET左边
状态灯变成绿色。
15、原点设置完成后,再次下载(将原点设置保存到ROM中),断开PC控制,由PLC通过正确的报文来控制。
遇到的问题和解决方法:
1、出现SMARTMODE和不支持同步方式的报警:
需要在TOPOLOGY界面里将set和actual的树形结构变成一致(下面截图为离线状态,连线后会同时出现set 和actual的比较画面)。
2、出现
3、出现controlpanel中(可
以将fb13的NW10中的L0.0BYTE2结构
4
5
6
7、
将P2507参数写数值2,将当前位置置0,并将偏移值写入P2525。
8、
下面指令是将变化写入到ROM 中: 参考点设置方法参考文档S120通过111报文实
现基本定位功能.pdf (P9-15)
绝对值编码器的回零方式有3种:
1. 主动回零
2. 直接设置参考点:激活定位功能,接通运行使能P840,激活设置参考点命令P2596,将当前位置设置为
P2599中的数值(比如0)。
3. 被动回零:启动寻零位,让伺服运动(JOG 或MDI ),当P488/489定义好的快速输入接通,将当前位置
设为0。
以上3中方法,只有第一种方法可以掉电保存。
实际电流值(扭矩)的转换:
PCD_RD.RD_PCD.Torque (通过报文读来的电流/扭矩数值,可设置)/4000H (4000H 对应100%),这个比数代表着实际扭矩和设定的基值电流/扭矩(基值电流在P2002中设置,默认是100A ;参考扭矩在P2003中设置,默认是1NM )的百分比。
S120的一些常用参数:
实际速度,电流,扭矩显示值(平滑处理过,100ms ),未处理的过程实际值为r63,r68,r80
速度,电压,电流,扭矩,功率,角度和加速度的基值:
PLC ✍S120的报文(telegram111):
S120✍PLC 的报文(telegram111):
1.
2. 1.
3. 当P1215=1或者3,下面这些信号的丢失都会导致抱闸关闭:
p0844,p0845orp0852orasaresultofafaultwithOFF2response
4. 如果导入的配置中选了"noholdingbrakepresent",系统会自动识别抱闸的类型,如果检测到抱闸,将自动
将配置改为"motorholdingbrakeasforsequencecontrol".
5. 如果使用的是电机内部抱闸,P1215不能设为3.
6. 如果使用的是外部抱闸,P1215=3,且必须指定给r0899.12一个外部信号。
7. Whenthefunctionmodule"extendedbrakecontrol"isactivated(r0108.14=1),r1229.1shouldbeinterconnec
tedascontrolsignal.
8. Theparametercanonlybesettozerowhenthepulsesareinhibited.
9. Theparameterization"nomotorholdingbrakeavailable"and"SafeBrakeControl"enabled(p1215=0,p9602=1
,p9802=1)isnotpracticalifthereisnomotorholdingbrake.
10. Theparameterization"motorholdingbrakethesameassequencecontrol,connectionviaBICO"and"SafeBrake
Control"enabled(p1215=3,p9602=1,p9802=1)isnotpractical.
如果使用的是安全抱闸继电器,第二个选项必须设置为Brakecontrolwithdiagnosticsevaluation 。
如果使用的是普通抱闸继电器,第二个选项必须设置为Brakecontrolwithoutdiagnosticsevaluation 。
户可在此自
行指定报文
内容
参考Adobe Acrobat 7.0 Document
p2571EPOSmaximumvelocity
Changeable:UT
Calculated:- Accesslevel:1 Datatype:Unsigned32
Dynamicindex:- Functiondiagram:3630 Object:SERVO(EPOS),VECTOR(EPOS) Pgroup:Basicpositioner Version:2603900 Groupofunits:-
Unitselection:- Notformotortype:-
Expertlist:1 Min
Max Factorysetting
1[1000LU/min]
Description:
Dependence:
Themaximumvelocityforthebasicpositionershouldbealignedwiththemaximumspeed/velocityoft hespeed/velocitycontroller:
Rotaryencoders:
p2571[1000LU/min]=min(|r1084|,|r1087|)[1/min]xp2505/p2504xp2506/1000
Linearencoders:
p2571[1000LU/min]=min(|r1084|,|r1087|)[m/min]xp2503/10[m]
P2571
Y----15A,3000RPM72000
T----15A,3000RPM72000
X----8A,6000RPM100000。