利用MATLAB的汽车主动悬架动力学仿真
基于Matlab及Workingmodel 的车悬架仿真

设计方案
1.背景调查
2. 确定选题
3. 理论分析
4. 仿真评估
成员分工
原理分析,软件仿真
赵明宇
资料收集制作,课题评估
零件功能
(1)减振器
是迅速衰减汽车的振动,改善汽车的行驶 平顺性,增强车轮和地面的附着力 (2)弹性元件 支撑垂直载荷,缓和和抑止不平路面引起 的振动和冲击 (3)导向机构 悬架既要满足汽车的舒适性要求,又要 满足其操纵稳定性的要求,而这两方面又 是互相对立的。
车悬架
Sub title
1.ONE
车悬架
Sub title
1.ONE
简要介绍
悬架是汽车的车架与车桥 之间的传力连接装置的总称, 是传递作用在车轮和车架之间 的力和力扭,并且缓冲由不平 路面传给车架或车身的冲击力, 并衰减由此引起的震动,以保 证汽车能平顺地行驶。
悬架是汽车中的一个重要总成,它把车架与车轮弹性 地联系起来,关系到汽车的多种使用性能。从外表上 看,轿车悬架由杆、筒以及弹簧组成,但它并不简单, 轿车悬架是一个较难达到完美要求的汽车总成,悬架 既要满足汽车的舒适性,又要满足其操纵稳定性的要 求,这两方面又是互相对立。 为了取得良好的舒适性,需要大大缓冲汽车的震动, 这样弹簧就要设计得软些,但弹簧软了却容易使汽车 发生刹车“点头”、加速“抬头”以及左右侧倾严重 的不良倾向,不利于汽车的转向,容易导致汽车操纵 不稳定等。
主动悬架matLAB分析

PID控制的四分之一车辆主动悬架仿真基本条件:路面路谱模型建立:采用随机路面输入,随机路面不平度函数如公式(2):q t ' 2 n01uq t 2 n0 G q n0 u w t(2)其中,n01为下截止空间频率,n01 =0.011m-1;n0 0.1为参考频率,G q n0 路面不平度系数0.000064(查《汽车理论》,B 级路面);w t 是均值为零、power 为0.1 的带限白噪声,采样频率1000;u 是汽车行驶车速24(m/s);q t 为路面位移激励。
仿真模型建立:主动悬架:被动悬架:路面激励:PrDdUCT∆φ*⅛α≡ OenVBtNeGSineb ⅛e ς∣rai □>r4白噪声路面输入模型所采用的值是B级路面,直接调用MATLAB的白噪声模块,激励图如图所示有无PID 控制即主动与被动悬架模型仿真结果对比(黄线为被动,绿线为主动)车身加速度:从车身加速度值可以看出,在没有PID控制模块的影响下,被动悬架的车身加速度最高可达0.6 数值,在有了PID控制的主动悬架的基础上,车身加速度被有效控制在了0.2 以内,极大的增加了乘车的舒适性,保证了汽车的一个平顺性指标。
车身加速度与路面激励的频率特性:悬架动挠度:从悬架位移进行分析,主动悬架与被动悬架在变化规律上基本相同,但是被动悬架与主动悬架相比,其动作频率更高,也就是说,在保持一定车身加速度的情况下,主动悬架在尽可能的减小来自地面的一个冲击,所以主动悬架的变化频率明显高于被动悬架。
悬架动挠度与路面激励频率特性:架,这是因为加入了主动 PID 的一个控制,导致轮胎的一个工作条件 受到了更大的一个冲击,这是我们在过程中要进行避免的。
动载荷与路面激励的频率特性:轮胎动载从轮胎所受的载荷上进行分析, 在被动悬架的动载荷小于主动悬由仿真结果可知,通过反馈控制调节,更大程度上是为了使人们得到一个更大的舒适性,也就是平顺性。
利用MATLAB的汽车主动悬架动力学仿真
":-1=),1> ,6=KFP?-AFTPFS6N?.FAQQ6F= L ,-. Z <RS6<=FO PK>AOFS<P S;K<PW 6Q FRRO6KT S< <RS6<=FO N<=SP<O <E FN? S6VK?QAQRK=Q6<= XFQKT <= [AFPSKP VK;6NOK TW=F\6NQ \<TKO <E FNS6VK?QAQRK=Q6<=$ 8Q6=> /01,02 Q<ESJFPK7 TW? =F\6NQ Q6\AOFS6<= \<TKO <E VK;6NOK <E FNS6VK?QAQRK=Q6<= 6Q KQSFXO6Q;KT S< \F]K F=FOWQ6Q F=T Q6\AOFS6<= FN? N<PT6=> S< Q<\K FNSAFO TFSF$ M6\AOFS6<= <ASRAS NF= XK AQKT S< KVFOAFSK S;K N<=SP<O \KS;<T <E FNS6VK?QAQRK=Q6<= F=T QSPANSAPK RFPF\KSKPQ <E VK;6NOK 6= PKOFS6<= S< P6TK RKPE<P\F=NK$ ?5’ @2=A-> FNS6VK?QAQRK=Q6<=;Q6\AOFS6<=;/01,02 悬架作为现代汽车上重要的总成之一, 对汽车的平顺性、 操纵稳定性等有重要的影响 $ 传统的被动 悬架虽然结构简单, 但其结构参数无法随外界条件变化, 因而极大的限制了悬架性能的提高 $ 主动悬架 通过采用激励器取代被动悬架的弹性和阻尼元件, 组成一个闭环控制系统, 根据汽车的运动状态和当前 激励大小主动做出反应, 使其始终处于最佳工作状态 $ /01,02 是目前世界上最为流行的以数值计算为主的软件,不但具有卓越的数值计算功能和强大 的图形处理能力, 而且还具有在专业水平上开发符号计算、 文字处理、 可视化建模仿真和实时控制能力, 使 /01,02 成为适合多学科、 多部门要求的新一代科技应用软件 $ 在 /01,02 中有一个对动态系统进 行建模、 仿真和分析的软件包—— — M4/8,4C^, 支持连续、 离散及两者混合的线性和非线性系统, 与传统 的仿真软件包相比, 具有更直观、 方便、 灵活的优点 _ ! ‘ $
基于Matlab的轮式悬架移动平台动力学建模与仿真
q ) k I ̄)t ( = 0o(d t at
式中,(为白 f 噪声, 。2 qo 。 ) k= ̄ () nU
( 3 )
当移动 平 台速度 u 1 m/ 路面 为 C级 时 : =. s 2 ,
k :2c 01 4 5 × 0 1 o 7X .× 2 6 1 ~X . . 4 ( ) 2=00 8 4 3
0 引言
随 着科技 的发 展 ,移 动机 器人 已普遍 应用于 工 业 、农 业 、军事侦 察 、空间探 索等 领域 ,其 中 ,移 动 机 器人 的行 进 方式 仍 然 以轮 式 应用 最 为广 泛 。 通 常情 况下 ,多数 轮式移 动机 器人 没有安 装悬架 系 统 或安 装悬 架 系统 后模 型 中未 考虑其 对整体 机构 影 响 ,而 只考虑 行机构 上 ,使其变 为冗 余机构 ,单 独对轮 式悬架
声通 过 积 分 器 产 生 或 由 一 白噪 声 通 过 成 形 滤 波 器
产生 ,本文 将采 用第 一种 方法 生成路 面输 入 :
路面 功率谱 密度 函数 表达 式如下 :
/ 、一
Gq
(=qon w2 Gn —l(= ) ()0/ I『 )
( 1 )
将其 转化 为时 间频 率 下 路 面 不 平 度 垂 直 速 度 功 率谱 密度 :
移 动载体 进 行研 究较 少 口。对于 非结构 环境 下 的轮 】 式 悬架移 动平 台而 言 ,悬 架 的运动 学以及动 力学 分 析 是轮式 悬架 移动 平台设 计 、运 动校 核的重 要 内容 之 一 。悬 架的重 要评价 指标 有 悬架 的动挠 度 、 轮 胎 的动 载 荷和车 身加速 度 ,这些参 数对悬 架 的设 计 起 到 重 要 作用 】 此外 ,车 身 俯 仰 角及 侧 倾 角 。 的变化规 律关 系到车 体的控 制策略 。 本 文 针 对轮 式悬 架 移 动 平 台 ,对 非 结 构 路 面 情 况 进 行 了 分 析 并 建 立 模 型 L,之 后 对 轮 式 悬 架 8 】 移 动 平 台悬 架 系统 的动 挠 度 、轮 胎 动 载 荷 、车 身 垂 向加 速 度 、车 身 俯 仰 角 及 车身 侧 倾 角 等 重 要 指
基于ADAMS和MATLAB的汽车主动悬架联合仿真研究
基于ADAMS和MATLAB的汽车主动悬架联合仿真研究基于ADAMS和MATLAB的汽车主动悬架联合仿真研究1. 引言在现代汽车工业中,悬挂系统是保证车辆行驶平稳性和乘坐舒适性的重要组成部分。
传统的汽车悬挂系统是被动的,通过弹簧和减振器来吸收路面不平造成的冲击力,但对于不同路面条件和行驶动态的应对能力有一定的局限性。
随着科技的进步和人们对驾驶体验的要求提高,汽车的主动悬挂系统逐渐得到了广泛关注。
主动悬挂系统能够通过感知路面信息和车辆状态来实时调整悬挂参数,从而提高车辆的行驶稳定性和乘坐舒适性。
2. 主动悬挂系统的工作原理主动悬挂系统由悬挂执行机构、传感器和控制算法等组成。
传感器用于感知路面信息和车辆状态,悬挂执行机构负责实时调整悬挂参数。
控制算法根据传感器获取的信息来生成相应的控制策略,控制悬挂执行机构的工作。
3. ADAMS仿真模型建立ADAMS是一款用于多体动力学仿真的软件,可以模拟机械系统的动力学行为。
在本研究中,我们使用ADAMS软件建立了主动悬挂系统的仿真模型,包括车身、车轮、悬挂执行机构等。
通过在ADAMS中定义悬挂系统的各个参数和控制策略,我们可以模拟不同工况下悬挂系统的工作状态。
4. MATLAB控制算法设计MATLAB是一款强大的数学计算和仿真软件,我们使用MATLAB来设计主动悬挂系统的控制算法。
在控制算法设计中,我们需要考虑路面信息的感知、悬挂参数的调节等因素。
通过MATLAB的编程和仿真工具,我们可以方便地设计和验证不同控制策略的性能。
5. 联合仿真与分析在ADAMS和MATLAB的联合仿真中,我们将MATLAB中设计的控制算法与ADAMS中的悬挂系统模型相结合,进行系统级的仿真和分析。
通过联合仿真,我们可以模拟车辆在不同路面条件下主动悬挂系统的工作情况,评估系统的控制性能和对车辆行驶动态的影响。
6. 结果与讨论通过联合仿真和分析,我们可以得到主动悬挂系统在不同路面条件下的反馈响应结果。
基于matlab的车辆工程仿真实例 -回复
基于matlab的车辆工程仿真实例-回复一个基于MATLAB的车辆工程仿真实例是车辆悬挂系统的分析与优化。
在汽车设计中,悬挂系统起着至关重要的作用,影响着车辆的舒适性、稳定性和操控性。
使用MATLAB可以通过建立车辆的动力学模型,对悬挂系统进行仿真分析和优化。
以下是一个可能的仿真实例步骤:1. 建立车辆的动力学模型:使用MATLAB 建立车辆的多体动力学模型,包括车体、车轮、悬挂系统等。
模型可以考虑车辆的质量分布、悬挂系统的刚度和阻尼等参数。
2. 仿真悬挂系统的响应:在建立好动力学模型后,可以通过输入不同的激励,如车速、道路条件等,模拟悬挂系统的动态响应。
通过仿真可以了解车辆在不同工况下的悬挂系统行为,如车身姿态、轮胎力等。
3. 分析悬挂系统参数的影响:在模拟悬挂系统的响应之后,可以通过改变悬挂系统的参数,如刚度和阻尼,来分析这些参数对悬挂系统响应的影响。
通过分析可以确定最优的悬挂系统参数,以满足特定的需求,如舒适性、稳定性等。
4. 优化悬挂系统设计:基于分析结果,可以对悬挂系统的设计进行优化。
通过MATLAB的优化工具箱,可以使用不同的优化算法,如遗传算法、粒子群算法等,来搜索最优的悬挂系统参数组合。
5. 评估优化结果:在优化过程中,评估优化结果的有效性是必要的。
可以使用MATLAB的仿真工具再次运行优化后的悬挂系统模型,并进行性能评估。
性能评估可以包括悬挂系统的响应、车辆稳定性、舒适性等方面。
通过以上步骤,可以使用MATLAB对车辆悬挂系统进行仿真分析和优化,以改善车辆的悬挂系统性能。
这个实例展示了MATLAB 在车辆工程中的应用,可以帮助工程师更好地理解和优化车辆的悬挂系统。
MATLAB软件在汽车悬架系统的模拟与分析中的应用
摘要汽车悬架系统是整个汽车中非常重要的一个环节,它性能的好坏直接影响到汽车的平顺性和安全性,而主动悬架系统能使汽车的乘坐舒适性以及操纵稳定性和安全性得到很大程度的提高,因此,主动悬架系统是现代汽车的一个发展方向。
本文分别对汽车的被动悬架系统和主动悬架系统建立了双轴四自由度的模型,列出了这两种模型的状态方程,并结合现代控制理论中的线性调节器理论对主动悬架的控制原理进行了分析。
本人在分析悬架系统工作特性的基础上使用了c 语言对MATLAB软件进行了二次开发,开发出的这套软件它能对不同型号的被动悬架系统和主动悬架系统汽车进行模拟仿真,并进行分析,因此命名为SAS软件(以下简称SAS)。
利用SAS软件对被、主动悬架进行了模拟分析,根据模拟的结果对被动悬架和主动悬架汽车的性能进行了对比分析,并对其平顺性进行了评价。
关键词:悬架、主动、被动、MATLAB模拟ABSTACTSuspension system is one of the most important part in the whole automobiles. Its performance influences directly on ride comfort and safety of auto. Active-suspension is able to improve greatly the performances of auto such as ride comfort, security and stability. Hence developing and designing the active-suspension is the important direction in the future.In the paper ,I set up two four-freedom models about passive suspension and active-suspension of vehicles, and list their state space equations. Moreover, I analyze the controlling principle of active-suspension by using the modern controlling theory.I develop a set of software based on the MATLAB software by using C language according to suspension performance. Its main functions are to simulate the passive-suspension and active suspension about vehicles whose construction parameters are variable and then analyze the suspension. So I call this software SAS software (short for SAS). Using SAS software, I simulate the passive-suspension and active-suspension. According to the result after simulating, I analyze and compare performances of two kinds of suspensions, and furthermore evaluate the ride comfort on vehicles.Keywords: suspension active passive MATLAB simulation第二章建立汽车悬架系统的状态方程2. 2汽车被动悬架系统状态方程的建立根据上一节的分析,我们可以把汽车被动悬架系统简化为一个如图2所示的1/2车辆模型。
基于MATLAB的汽车悬架仿真研究
基于MATLAB的汽车悬架仿真研究汽车悬架系统是车辆重要的组成部分之一,对于车辆的操控性能和乘坐舒适性有着重要的影响。
因此,研究和优化汽车悬架系统是提高车辆性能和安全性的重要途径之一、本文将基于MATLAB平台,进行汽车悬架系统的仿真研究。
首先,我们需要建立一个适合于汽车悬架系统仿真的数学模型,用于描述悬架系统的动力学特性。
一般情况下,我们可以将汽车悬架系统简化为质点模型,即将悬架系统抽象为质点在垂直方向上的运动。
然后,可以采用多体动力学的方法,建立基于质点模型的数学方程。
基于质点模型的数学方程可以使用MATLAB进行求解。
首先,需要定义汽车悬架系统的参数,包括悬架刚度、阻尼系数、质量以及悬架系统的几何参数等。
然后,可以通过MATLAB中的ODE45函数来求解悬架系统的动力学方程。
ODE45函数是一种常用的求解常微分方程组的数值方法,可以计算出质点的运动轨迹和关键参数,如振动频率、振幅等。
通过悬架系统的仿真研究,我们可以得到一些有关于汽车悬架系统性能的重要信息。
例如,可以分析质点在不同路面条件下的运动特性,进而评估悬架系统对激励的响应能力和减震效果。
同时,也可以研究不同悬架参数对悬架系统性能的影响,例如刚度、阻尼系数、质量等。
通过调整悬架参数,可以优化悬架系统的性能。
此外,也可以进行不同悬架系统的对比研究。
例如,可以对比传统悬架系统和主动悬架系统的性能差异。
主动悬架系统可以根据路况调整悬架刚度和阻尼系数,以提供更好的悬架系统性能。
通过与传统悬架系统的对比研究,可以评估主动悬架系统的优势和应用前景。
总的来说,基于MATLAB的汽车悬架仿真研究可以提供有关汽车悬架系统性能和优化方案的重要信息。
通过这些仿真研究,可以提高汽车悬架系统的性能和安全性,提升车辆的乘坐舒适性和操控性能。
除此之外,可以应用这些研究成果,为汽车悬架系统的设计和优化提供理论和方法支持。
运用MatlabSimulink对主动悬架动力学仿真与分析
运用Matlab/Simulink对主动悬架动力学仿真与分析摘要:基于主动悬架车辆1/4动力学模型,采用LQG最优调节器理论确定了主动悬架的最优控制方法,利用matlab软件建立了主动悬架汽车动力学仿真模型,并用某一车型数据进行了动力学分析和仿真,仿真输出量可作为评价主动悬架的控制方法和与平顺性有关的车辆结构参数的依据。
关键词:主动悬架仿真 MatlabDynamics Simulation Of Vehicle Active-suspension By Using MATLAB Abstract: Linear-Quadratic-Gaussian(LQG) optional regulator theory is applied to optional control of active-suspension based on quarter vehicle dynamics model of active-suspension. Using MATLAB software,dynamics on model of vehicle of active-suspension is established to make analysis and simulation according to some actual data .Simulation output can be used to evaluate the control method of active-suspension and structure parameters of vehicle in relation to ride performance.Key words: active-suspension simulation MATLAB悬架作为现代汽车上重要的总成之一,对汽车的平顺性、操纵稳定性等有重要的影响,统的被动悬架虽然结构简单,但其结构参数无法随外界条件变化,因而极大的限制了悬架性能的提高。
基于Matlab的汽车半主动悬架动力学仿真与分析
,
但结构复杂
、
成本高
普及
中心
) 路 面 位移 的输 入 函 数 作 用 在 轮 胎 与地 面 接 触 点 的
难
…
。
而 由变 阻 尼 减 振 器 或 变 刚 度 弹 簧 构 成 的 半 主 动 悬
。
架 系 统 同样 可 以 根 据 路 面 条 件 及 汽 车行 驶 状 态 而 做 出 响
应
,
一
个 简 化 的 二 自 由 度 1 /4 汽 车 模 型 如 图 1 所 示
语 音 的格 式 编 写 M 文 件 ;最后 在 模 型 窗 口中点 击 下 拉 菜 单 中 的 Sat 开 始 仿 真 ,通 过 S o e模 块 观 看 各 参 数 随 时 间 t 项 r cp 变 化 的动 态 曲 线 。
根 据 有 关 数 据 一 设 车 身 质 量 m : 6 k ,车 轮 质 量 , 5 0g
。
具 有较 高 的性 能 价格 比
和广 阔的应 用 前景
。
、
。
为 固 定 阻 尼 减 振 器 的 阻 尼 系 数 ( N s /m )
:
系
统 的动力 学 方程 为
m
s
2
半主动悬 架 动
汽 车悬 架 系 统 对 路
缸
。
-
k
,
(z
—
-
~
z
t
) _G
+ c
,
(z (z
一
-
~
z
t
) +‰
+
}
—
( 1)
力学模 型 的建 立
,
太 多反 而容易导致 系统
通 常要
基于MATLAB的汽车悬架仿真研究

基于MATLAB的汽车悬架仿真研究周新鹏(昆明理工大学交通工程学院,云南昆明)摘要:针对不同悬架的性能特点,分别建立了被动悬架、主动悬架的车身与车轮二自由度振动模型,基于Matlab 软件用白噪声法模拟了路面不平度随机输入,在此基础上,对被动悬架与主动悬架的性能进行了仿真对比。
仿真结果表明:主动悬架能更好地衰减振动,因此具有更佳的平顺性。
关键词:汽车主动悬架被动悬架Matlab引言悬架是车架(或承载式车身)与车桥(或车轮)之间一切传力连接装置的总称,用以把路面作用于车轮上的各种力和力矩传递到车架上[1],同时还起到缓和冲击、吸收振动、提高平顺性与乘坐舒适性的作用。
传统悬架的刚度和阻尼是按经验或优化设计的方法确定的,在汽车行驶过程中,其性能不变,也无法调节,从而使汽车平顺性与乘坐舒适性受到一定的影响,因此称这种悬架系统为被动悬架。
主动悬架可根据汽车的行驶条件的变化对刚度和阻尼进行动态地自适应调节,因此能使悬架系统始终处于最佳状态[2]。
车身垂直位移决定了汽车振动时振幅的大小,悬架行程直接影响撞击限位的概率,而车身加速度是评价汽车平顺性的主要指标[3],因此,本研究主要从车身垂直位移、车身加速度、悬架行程等几个方面比较主动悬架与被动悬架的特性。
1.汽车悬架相关理论汽车悬架系统由弹性元件、导向元件和减振器等部分组成。
弹性元件用来传递并承受垂直载荷,它也具有一定的吸振能力;导向元件用来传递纵向力、侧向力和由此产生的力矩;减振器用来迅速减小车身和车架的振动。
汽车悬架一般应具备以下功能:(1)承受汽车的重量;(2)承受并缓和汽车行驶时由路面通过车轮传给车身的冲击与振动;(3)在承受制动力、驱动力和转弯时产生的离心力时,要保证操纵的稳定性:包括汽车行驶时不要产生过大的侧倾与仰倾,使制动时产生的“点头”现象尽可能小;(4)使汽车具有不足转向特性,不产生过度转向;(5)使汽车与路面有较好的附着特性,不会由于过大的振动而使车轮脱离路面;(6)在凹凸不平的路面上行驶时,为了保证必要的离地间隙,能主动调节车身高度。
基于MATLAB仿真的汽车悬架控制研究-车辆工程专业
基于MATLAB仿真的汽车悬架控制的研究摘要随着我国的科学及技术和社会经济的快速发展。
根据公安部和中国汽车流通协会的统计,仅2019年,中国就登记了2578万辆新车,居世界首位。
到2020年,中国汽车保有量已达2.6亿辆,并稳步增长。
这也带来了一系列的问题,其中行车安全性和乘坐的舒适性受到顾客的关注。
而在未来的社会中汽车购买的主力军会是女性,女性对汽车的舒适性是最敏感的,汽车的悬挂系统在汽车舒适性中占据主导地位。
本文主要对汽车的汽车的主动悬架系统进行建模和分析,从而让汽车的安全性、舒适性和平顺性得到明显的提高,使汽车的行驶不在受路面的影响。
通过对汽车的悬架系统的类别、组成、工作的原理和发展的程度进行了概括性的介绍,根据汽车悬架系统的发展情况,对通过数学模型的建立和仿真,探讨了汽车主动悬架系统的结构和工作原理,通过仿真的结果分析汽车主动悬架在汽车行驶期间的工作状态和在不同路况下对汽车行驶的影响。
利用Simulink模块建立整车悬架系统的仿真模型,观察不同悬架类型对汽车行驶的安全性、舒适性和平顺性的影响,根据仿真结果,得出结论,分析主动悬架系统能否发挥理论上的作用。
最后,基于Matlab/SimuLink对车辆主/被动悬架系统进行建模,并进行仿真分析。
得出的结论是,主动悬架系统可以有效地提高车辆的安全性,舒适性和舒适性。
【关键词】汽车悬架,MATLAB,Simulink,主动悬架,被动悬架Research on Automobile Suspension Control Based onMATLAB SimulationAbstractWith the rapid development of science, technology and social economy in China. According to statistics of the Ministry of public security and China Automobile Circulation Association, in 2019 alone, China registered 25.78 million new cars, ranking first in the world. By 2020, China's car ownership has reached 260 million, with a steady growth. This also brings a series of problems, among which the safety of driving and the comfort of riding are concerned by customers. In the future society, the main force of car purchase will be women. Women are the most sensitive to the comfort of cars. The suspension system of cars plays a leading role in the comfort of cars. In this paper, the active suspension system of the car ismodeled and analyzed, so that the safety, comfort and smoothness of the car can be significantly improved, so that the driving of the car is not affected by the road.This paper introduces the category, composition, working principle and development degree of the automobile suspension system. According to the development of the automobile suspension system, it discusses the structure and working principle of the automobile active suspension system through the establishment and Simulation of the mathematical model. Through the simulation results, it analyzes the working state of the automobile active suspension during the driving period and whether it is working or not The influence of the same road condition on the vehicle driving. The simulation model of the whole vehicle suspension system is established by using the Simulink module, and the influence of different suspension types on the safety, comfort and ride comfort of the vehicle is observed. According to the simulation results, the conclusion is drawn, and whether the active suspension system can play a theoretical role is analyzed.Finally, the vehicle active / passive suspension system is modeled and simulated based on MATLAB / Simulink. The conclusion is that the active suspension system can effectively improve the safety, comfort and comfort of the vehicle.1绪论1.1引言目前,驾驶员在日益复杂的道路交通环境中驾驭汽车时,由于路况的复杂性,他们需要更频繁地改变行驶方向,驾驶员和乘客越来越依赖汽车的悬挂系统,作为汽车的五大总成之一,一个好的悬挂系统将给驾驶员提供一个更稳定的控制感和安全的驾驶体验并且乘客能感受到一个更舒适的乘坐感。
采用MATLAB的车辆悬挂半主动控制的仿真研究
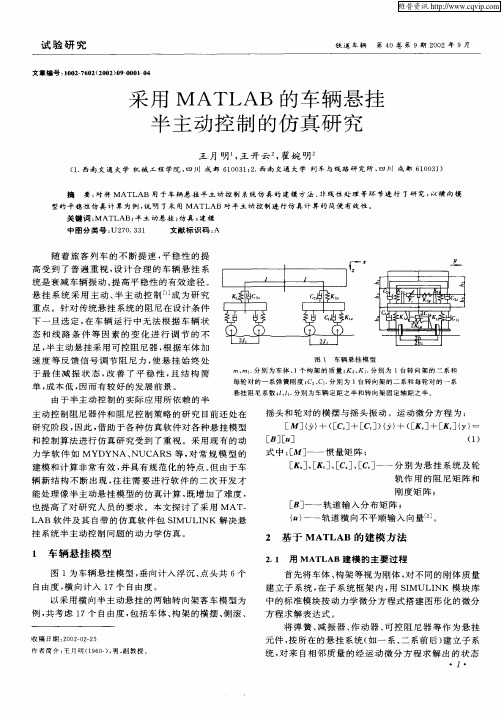
图 1 车 辆 悬 挂 模 型
m、 . 别 为 车体 、 m 分 1个 构 架 的 质 量 ; 、 . 别 为 1台 转 向 架 的 二 系 和 KzK1 分 每 轮 对 的 一 系 弹 簧 刚 度 ; 、 分 别 为 1台 转 向架 的 二 系 和 每 轮 对 的 一 系 CzC . 悬 挂 阻 尼 系 数 ;、 分 之 半 。 zz.
统 , 来 自相 邻 质 量 的 经 运 动 微 分 方 程 求 解 出 的 状 态 对
下 一 旦 选 定 , 车 辆 运 行 中 无 法 根 据 车 辆 状 在 态 和 线 路 条 件 等 因 素 的 变 化 进 行 调 节 的 不 足 , 主 动 悬 挂 采 用 可 控 阻 尼 器 , 据 车 体 加 半 根 速 度 等 反 馈 信 号 调 节 阻 尼 力 , 悬 挂 始 终 处 使 于 最 佳 减 振 状 态 , 善 了 平 稳 性 , 结 构 简 改 且 单 , 本低 , 成 因而 有 较 好 的发 展 前 景 。 由于 半 主 动 控 制 的 实 际 应 用 所 依 赖 的 半 主 动 控 制 阻 尼 器 件 和 阻尼 控 制 策 略 的 研 究 目前 还 处 在 研 究 阶段 , 此 , 助 于各 种仿 真 软 件 对 各 种 悬 挂 模 型 因 借 和 控 制 算 法 进 行 仿 真 研 究 受到 了重 视 。采 用 现 有 的动 力 学 软 件 如 MYDYNA、 NuCARs等 , 常 规 模 型 的 对 建 模 和 计 算 非 常 有 效 , 具 有 规 范 化 的特 点 。 由于 车 并 但 辆 新 结 构 不 断 出现 , 往 需 要 进 行 软 件 的 二 次 开 发 才 往 摇 头 和 轮 对 的横 摆 与 摇 头 振 动 。运 动 微 分 方 程 为 : [ M] } ( c ] [ ) 。} ( 。 +[ ] Y 一 { + [ 。+ c ] {.+ [ ] { } =
基于ADAMS和MATLAB的汽车悬架系统仿真分析
基于ADA MS和MAT LAB的汽车悬架系统仿真分析3韩朝晖(湖南文理学院继续教育学院,湖南常德 415000)摘要:文中对汽车半主动悬架系统的仿真分析采用了ADAMS和MAT LAB联合仿真方法。
在ADAMS中建立了1/4汽车悬架的动力学模型,然后用MAT LAB软件建立汽车半主动悬架的阻尼控制模型,通过改变阻尼系数减小汽车的垂直振动。
在MAT LAB/SI M UL I N K中建立采用模糊逻辑控制的控制系统模型,分析汽车车身垂直方向的加速度,来达到汽车行驶的平顺性。
ADAMS和MAT LAB联合仿真方法为汽车动力学仿真提供了一种新途径。
关键词:虚拟样机技术;半主动悬架;模糊控制;联合仿真中图分类号:TH122 文献标识码:A 文章编号:1001-2354(2008)07-0016-04 车辆振动是影响车辆行驶性能的重要因素,这种振动不仅大大降低了车辆行驶平顺性,也影响其操纵稳定性。
车辆振动严重时,还影响其行驶速度,同时车辆振动也是车内噪声的主要来源。
为了提高汽车平顺性,减少振动,对汽车的悬架控制系统进行研究显得尤为重要。
1 ADAMS与MAT LAB软件简介ADA MS是目前世界上最著名的虚拟样机分析软件,广泛应用于汽车制造业、工程机械、航空航天、国防等领域。
ADAMS软件使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统动力学模型,利用拉格朗日第一类方程建立系统最大量坐标动力学微分-代数方程,求解器算法稳定,对刚性问题十分有效,可以对虚拟机械系统进行静力学、运动学和动力学分析,后处理程序可输出位移、速度、加速度和反作用力曲线以及动画仿真。
仿真结果可用于预测机械系统的性能、运动范围、碰撞检测、峰值载荷,以及计算有限元的输入载荷等[1~3]。
MAT LAB是矩阵实验室(M atrix Laborat ory)的简称,除具备卓越的数值计算能力外,还具有功能强大的工程应用工具箱,广泛应用于我国的各项领域[4,5]。
基于MATLAB的汽车悬架仿真研究
基于MATLAB的汽车悬架仿真研究汽车悬挂系统是汽车的重要组成部分,其性能直接影响了车辆的操控性、乘坐舒适性和安全性。
为了优化汽车悬挂系统的设计,提高车辆的性能和乘坐舒适度,研究人员利用MATLAB进行悬挂系统仿真研究。
首先,进行汽车悬挂系统的建模。
悬挂系统主要由弹簧和减震器组成,其目的是吸收和减轻车辆运动中的震动和冲击力。
通过在MATLAB中建立悬挂系统的数学模型,可以模拟和分析悬挂系统在不同路况条件下的工作原理。
其次,进行悬挂系统的参数优化。
汽车悬挂系统的参数包括弹簧刚度、减震器阻尼系数等。
通过在MATLAB中调整这些参数,可以模拟不同参数值下悬挂系统的性能。
在仿真过程中,可以通过分析车辆的加速度、车身倾斜角度等指标来评估悬挂系统的性能,从而选择出最佳的参数值。
第三,模拟不同路况下的汽车悬挂系统工作。
在真实的道路环境中,汽车悬挂系统需要应对不同的路况,如减速带、颠簸路面等。
在MATLAB 中,可以通过导入实际道路数据,对悬挂系统在不同路况下进行仿真。
通过模拟不同路况下的车辆动态响应,可以评估悬挂系统的性能和稳定性。
最后,进行悬挂系统控制策略的研究。
在现代汽车中,许多悬挂系统都配备了主动控制装置,可以根据路况和驾驶员的要求调整悬挂系统的工作状态。
在MATLAB中,可以将悬挂系统与控制算法相结合,进行悬挂系统控制策略的仿真研究。
通过模拟不同控制算法下悬挂系统的响应,可以评估控制策略对车辆性能的影响。
综上所述,基于MATLAB的汽车悬挂仿真研究能够帮助优化悬挂系统的设计和参数选择,提高车辆的操控性、乘坐舒适性和安全性。
通过模拟不同路况下的悬挂系统工作,并研究悬挂系统的控制策略,可以为汽车制造商和工程师提供有关悬挂系统性能和控制优化的重要参考。
基于Adams和Matlab联合的汽车悬架系统仿真分析

基于Adams和Matlab联合的汽车悬架系统仿真分析彭京奕【摘要】With the development of virtual prototyping technology, the virtual physical model and control model combined with simulation technology is becoming more and more mature. In this paper, a virtual model of the active suspension of vehicle with four degrees of freedom is established by using ADAMS soft-ware. By means of the dynamic equations of vehicle active suspension system, the simulation platform of vehicle suspension system based on ADAMS and MATLAB is built. On the basis of this, the vertical accel-eration response of a car body and the acceleration response of the body pitch angle are analyzed. The simu-lation results are basically consistent with the results of the [1] mathematical model, which verifies the cor-rectness of the system simulation platform.%伴随着虚拟样机技术的不断发展,虚拟物理模型与控制模型联合仿真技术日趋成熟.文中利用ADAMS软件,建立了二分之一车体四自由度汽车主动悬架的虚拟模型.通过集成车辆主动悬架系统的动力学方程,搭建了基于AD-AMS和MATLAB联合的汽车悬架系统仿真平台.在此基础上,比较分析了某轿车汽车车身垂直加速度响应和车身俯仰角加速度响应,该模拟结果与文献[1]数学模型的结果基本吻合,从而验证了系统仿真平台正确性.【期刊名称】《交通节能与环保》【年(卷),期】2015(011)006【总页数】4页(P93-96)【关键词】主动悬架;Adams;Matlab;仿真【作者】彭京奕【作者单位】交通运输部公路科学研究院,北京 100088【正文语种】中文【中图分类】U467.1汽车悬架系统作为车架(或车身)与车轴(或车轮)之间连接的传力机件,其承受着多种作用力,既是保证乘员乘坐舒适性的重要部件,又是保证汽车行驶安全的重要部件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
李
迪, 等: 利用 #$%&$’ 的汽车主动悬架动力学仿真
!"
图!
车身垂直振动加速度
图"
悬架的动挠度
图#
轮胎变形
图$
轮胎跳动加速度
(
结束语
利用 #$%&$’ 软件对安装有主动悬架的汽车进行动力学仿真, 可以很方便的建立动力学仿真模 型, 可以方便的对车身垂直振动加速度、 悬架动挠度等变量进行跟踪, 就能利用国际标准 )*+!,(- 推荐 也可以帮助选 的方法进行车辆的平顺性评价. 仿真结果可以帮助评价与汽车平顺性有关的的结构参数, 择最优调节器的控制方法和控制器的设计 . 本文为了说明方便, 利用的是 - / 0 车辆动力学模型 . 为提高 车辆动力学仿真的精度, 可以增加系统自由度, 采用整车动力学模型. 参考文献:
收稿日期 b "&&#?&*?!# 作者简介 b 李 迪 L !()&? Z , 男, 副教授, 博士研究生 $
李
迪, 等: 利用 -./0.1 的汽车主动悬架动力学仿真
!"
%
主动悬架汽车动力学模型的建立
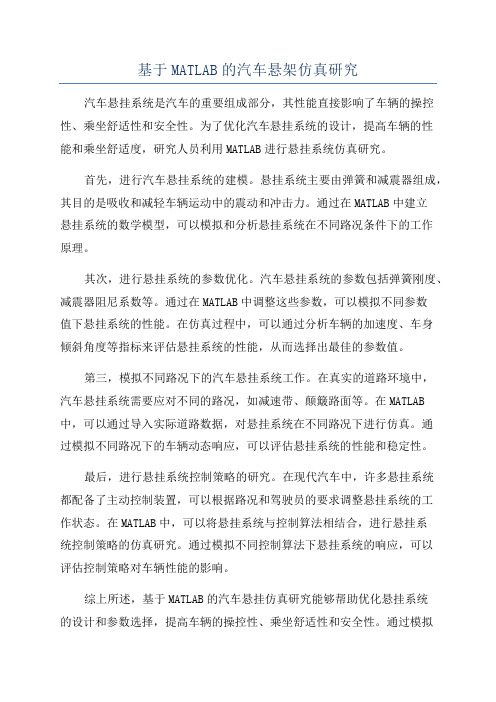
本文用 % , 2 车辆模型分析车辆特性 3 被动悬架的结构原理如图 % ’ ( ) 所示, 图中 #$、 #%、 !"、 !’、 0" 、 、 、 分别代表车辆的 车体重、 半桥重、 悬架刚度、 轮胎刚度、 悬架阻尼、 车体位移、 车桥位移、 1$ 1% 12 %,2 路面输入 3 主动悬架的结构原理如图 % ’ * ) 所示, 图中加设了一个激励器, 大 *+ 为激励器产生的控制力, 4!5 小根据系统的状态变量调节 3 !" ! 主动悬架的动力学方程 4 " 5 # $ 1 $ & !" ’ 1% 4 1$ ) + *+
#5 ##@! #5 )7@H
#5 ##@!
& 75 97"$ )#5 #$! & #5 ##"# #5 HI79 & )!5 9)" ""5 HI"
& "5 #I7I & #5 H@I)
{
}
!" #
$%&’(%)* 仿真模型 根据上述的主动悬架动力学模型和最优控制策略, 可建立仿真模型 5 在 *+,-+. 上的 KE4L<EM/ 仿 真模型如图 ! 所示 5
优控制方法,利用 /01,02 软件建立了主动悬架汽车动力学仿真模型,并用某一车型数据进 行了动力学分析和仿真 $ 仿真输出量可作为评价主动悬架的控制方法和与平顺性有关的车辆 结构参数的依据 $ 关键词:主动悬架;仿真; /01,02 中图分类号:13#(!$ ( 文献标识码: 0
&’()*+,- .+*/0)1+2( 23 456+,05 ",1+758-/-95(-+2( :’ ;-+(< !"#$"%
第 !) 卷第 * 期 "&&# 年 !! 月
山 东 理 工 大 学 学 报L自 然 科 学 版Z D<AP=FO <E M;F=T<=> 8=6VKPQ6SW <E 1KN;=<O<>W L MN6 a 1KN; Z
U<O$ !) C<$ * C<V$ "&&#
文章编号: !*)"?*!() L "&&# Z &*?&&""?&’
图!
主动悬架仿真模型
!" !
仿真输出 系统的仿真输出量为下列四个参数: 汽车车身垂直振动加速度、 悬架的动挠度、 轮胎的变形、 轮胎跳
动加速度 5 这些参数是衡量汽车平顺性和安全性非常重要的量 5 在图 ! 中的示波器 .+ 表示该示波器 输出车身垂直振动加速度的波形, 示波器 KNK 表示该示波器输出悬架动挠度的波形, 示波器 O,O 表示 该示波器输出轮胎变形的波形, 示波器 N+ 表示该示波器输出轮胎跳动加速度的波形 5 进行模拟仿真, 得到相应的输出量图形为图 $ P 95
’& F
% -
$
#
G 1-:1 + *-;*+ + !’ 1-<*+ H @ ’
’")
这里, # # $/ # # # # # # # # # .! + ! " #
! ! ! $ ! $
# # $ .! $ ! " , # $
! ! ! ! $
# # # $ .% .%
# $ .! + ! " # #
将这些参数代入上述的表达式 0,1,2,(,3, 利用 *+,-+. 的函数 % #4 54 6 ’ ( -AB C 04 14 24 (4 3 D 求得最优反馈增益矩阵 "、 BE::FGE 方程的稳态解 5 和闭环系统的特征值 65 " ( % )"$$5 " & "#$5 97 & )9@## )9)7" H#I5 "! ’ "5 7"7$
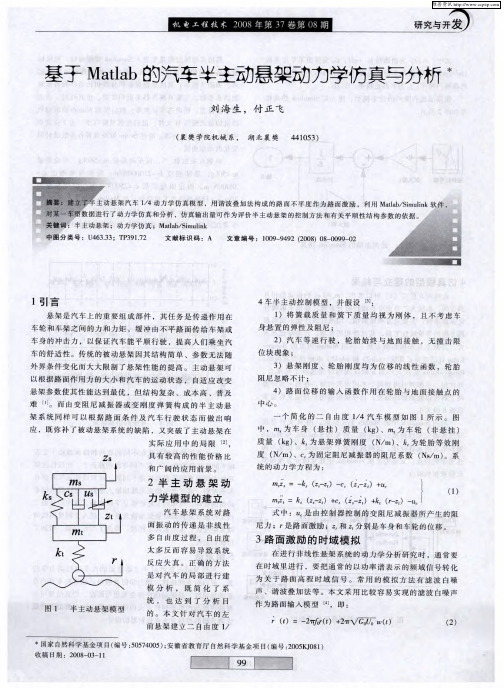
":-1=),1> ,6=KFP?-AFTPFS6N?.FAQQ6F= L ,-. Z <RS6<=FO PK>AOFS<P S;K<PW 6Q FRRO6KT S< <RS6<=FO N<=SP<O <E FN? S6VK?QAQRK=Q6<= XFQKT <= [AFPSKP VK;6NOK TW=F\6NQ \<TKO <E FNS6VK?QAQRK=Q6<=$ 8Q6=> /01,02 Q<ESJFPK7 TW? =F\6NQ Q6\AOFS6<= \<TKO <E VK;6NOK <E FNS6VK?QAQRK=Q6<= 6Q KQSFXO6Q;KT S< \F]K F=FOWQ6Q F=T Q6\AOFS6<= FN? N<PT6=> S< Q<\K FNSAFO TFSF$ M6\AOFS6<= <ASRAS NF= XK AQKT S< KVFOAFSK S;K N<=SP<O \KS;<T <E FNS6VK?QAQRK=Q6<= F=T QSPANSAPK RFPF\KSKPQ <E VK;6NOK 6= PKOFS6<= S< P6TK RKPE<P\F=NK$ ?5’ @2=A-> FNS6VK?QAQRK=Q6<=;Q6\AOFS6<=;/01,02 悬架作为现代汽车上重要的总成之一, 对汽车的平顺性、 操纵稳定性等有重要的影响 $ 传统的被动 悬架虽然结构简单, 但其结构参数无法随外界条件变化, 因而极大的限制了悬架性能的提高 $ 主动悬架 通过采用激励器取代被动悬架的弹性和阻尼元件, 组成一个闭环控制系统, 根据汽车的运动状态和当前 激励大小主动做出反应, 使其始终处于最佳工作状态 $ /01,02 是目前世界上最为流行的以数值计算为主的软件,不但具有卓越的数值计算功能和强大 的图形处理能力, 而且还具有在专业水平上开发符号计算、 文字处理、 可视化建模仿真和实时控制能力, 使 /01,02 成为适合多学科、 多部门要求的新一代科技应用软件 $ 在 /01,02 中有一个对动态系统进 行建模、 仿真和分析的软件包—— — M4/8,4C^, 支持连续、 离散及两者混合的线性和非线性系统, 与传统 的仿真软件包相比, 具有更直观、 方便、 灵活的优点 _ ! ‘ $
’ ( ) 被动悬架 图! ’ * ) 主动悬架 悬架结构原理
#
# !’ #%
!" #% # # # % #$ #
"&
# #
$%& 最优控制 最优控制目标是使车体的垂直加速度、 轮胎动载荷最小, 同时将悬架动挠度保持在允许的范围内3 ( ) 线性二次调节器是设计最优动态调节器的一种状态空间技术 089 0:;<(=>8?(@=(A:B>9(?CC:(; 3 为实现上 % -
1 - 2 薛定宇. 控制系统计算机辅助设计— #$%&$’ 语言及应用 1 # 2 . 北京 3 清华大学出版社, -44,. 1 ! 2 祁建城, 李若新. 汽车主动悬架最优控制 1 5 2 . 汽车工程 6 -444 7 - 8 3 -"9!:. (第! 版 ) 1 ( 2 余志生. 汽车理论 1 # 2 . 北京: 机械工业出版社, -44;. 1 0 2 %<=>?@=A $ B. +?CD>EF EAG *HI=?CD>EF FDAJEK ELCDMJ *H@?JA@D=A N=K K=EG OJ<DLFJ 1 5 2 . OJ<DLFJ *P@CJ> QPAE>DL@6 -4;06 -(3 ,-9R!. 1 " 2 SK=FFE Q $ , TDKC< B6 U=KC=A Q. $A )ACK=GHLCD=A C= OJ<DLFJ QPAE>DL@ 1 # 2 . QJ?EKC>JAC =N #JL<EADLEF VAWDAJJKDAW6 XADMJK@DCP =N &JJG@.
.% + .! + ! " # $ .%
!"
山
东
理
工
大
学
学