感知位置法
感知位置平衡法

感知位置平衡法(aligning perceptual positions)传统上,做“和事佬”需争吵双方同时列席。
这个“感知位置平衡法”则可以在另一方不在场的情况下,改变一个人对另一个人的看法(感知模式)。
因为一个人的思想和身体由内心支配,所以如果对另外一个人的感知模式改变了,面对那个人的时候,声调、身体语言、所选用的文字、说话和行为模式都会有改变,沟通效果和关系便会因此而有所不同。
在改善两人之间的沟通或关系上,感知位置平衡法是最有效的技巧之一。
两人各自怀着本来对对方和这份关系的“感知模式”,每次遇到对方都会凭这份“感知模式”去决定语言和行为。
假若两方面都没有改变各自内心的“感知模式”,每次遭遇都只会有同样的结果。
假若那是吵架和冲突,情况便不会有转机。
这个技巧是把内心的“感知模式”经由一张椅子而实物化了,凭改变自己内心的一些信念、价值观和规条,并经由一些语言和行为实现出来,那个“感知模式”便能改变,因而下次见面,对同样的人都会有不同的语言和行为,即态度上有了改变。
这边的语言和行为不同了,对方也会因此有不同的反应。
如此,双方互相做出更正面的反应和改变,沟通效果和关系便会出现改善。
这个技巧不一定只用于解决与另一个人的沟通和关系问题。
本来关系已经融洽,想有更高的提升,也可以用。
感知位置平衡法的步骤:(1)心中选定一个想提升与他沟通或关系的人。
安放两张椅子,一张自己坐上去,另一张放在对面(正中的前面)一个感到舒服的位置。
想想这个人坐在对面的景象。
①把这个人的座椅拉近一些或推远一些,以最能代表自己内心实际情况为要(不是内心所希望的距离)。
注意这个位置与自己的距离,以便稍后验证效果。
②注意这个人的脸或身体是否正面地面对着你,若对方是以侧面或侧身对着你,把对方慢慢地调校正面相对的位置。
③注意对方双眼的位置是否与你处于同一水平,如果不是,把两人的视线调校至同一水平(可想像能任意升/降对方或者自己的椅子)。
④若看到的只是黑白景象,调校为彩色。
课程轻度问题行为处理的策略和要求口诀

课程轻度问题行为处理的策略和要求口诀一、感知位置,重塑行为模式感知位置法:可以在另一方不在场的情况下,改变一个人对另一个人的看法(感知模式),进而改变面对那个人的时候声调、身体语言等行为模式。
这个方法是换位思考的升级版,是让当事人站在自己、对方和多个旁观者的角度来进行感知、体验与理解,与对方在情感上进行虚拟的沟通,增进相互理解,重塑感知模式。
某天放学后,我把班级吵架的两个学生留下来,我试着分别让他们站在自己、老师、同学、父母和对方重新审视那天的行为。
当他们站在自己的角度思考问题时,他强调的是自己的理由和委屈。
当让他们站在同学的角度看时,“他们俩怎么在课堂上吵起来了,太没有礼貌了。
”当让他们站在父母的角度看时,“小兔崽子,让你上学你在课堂上打架,明天就别上学了,在家干活吧。
”当让他们站在老师的角度看的时候,“你们俩不知道好好学习啊!你以为你给我学呢?”当让他们站在对方的角度看的时候,“王艳碰了我的桌子,可能是王艳的位置太窄了,也可能是我的桌子太靠前了,我挪一下椅子就可以解决了。
”这个案例给我的启示:孩子犯错误是正常现象,孩子在犯错误过程中成长,要利用错误促进孩子的成长。
二、强化消退并举,塑造良好听课行为在我带的历届班级中总会有顽皮的孩子,他们会趁我不备,在课堂故意捣乱,不是用小东西投掷别人,就是故意下座拿老实同学的东西来打闹,要么就用纸条写人家坏话抛给别人看,或者拿出东西来明目张胆地吃等破坏课堂纪律的现象。
行为主义心理学派有这样的观点:消退和强化。
消退是一种无强化的过程,其作用在于降低这种行为在将来发生的概率,以达到消除这种行为的目的。
强化就是给予一定的刺激,其作用在于增加这种行为在将来发生的概率。
我所任教的学校是一个特殊的学校,江苏扬州体校学生在我校插班就读,我班就有九个体校生,其中有七个体校生上课时故意恶作剧等行为。
这几个学生的目的是为了引起老师和同学们的注意,对恶作剧行为不反应,就不能满足他们的心理需要。
分布式感知网络中的节点定位算法分析
分布式感知网络中的节点定位算法分析在分布式感知网络中,节点定位算法的作用是确定网络中节点的位置信息。
节点定位是分布式感知网络中的一个重要问题,准确的节点定位可以提高网络性能,优化资源分配和实现更高级的应用。
目前,有很多节点定位算法被广泛应用于分布式感知网络中。
这些算法可以根据节点获取的感知数据来计算节点的位置信息。
下面将对几种常用的节点定位算法进行分析。
首先是基于距离的节点定位算法。
这种算法根据节点之间的距离来估计节点的位置。
常用的距离测量方法包括RSSI(接收信号强度指示)和TOA (到达时间)。
在这些算法中,每个节点测量到的距离信息通过网络传输到中心节点,然后中心节点利用三角定位等方法计算节点的位置。
这种算法可以实现较高的定位精度,但需要较多的通信开销。
其次是基于角度的节点定位算法。
这种算法利用节点之间的角度信息来计算节点的位置。
常见的角度测量方法包括AOA(到达角度)和TDOA(到达时间差异)。
在这些算法中,节点可以通过测量接收到的信号的相位差或到达时间差来计算角度信息,然后应用三角定位等方法计算节点的位置。
这种算法对传感器位置布局有一定的要求,但可以实现高精度的节点定位。
另外还有一种常用的节点定位算法是基于协作的节点定位算法。
这种算法利用网络中节点之间的协作信息来计算节点的位置。
协作信息可以包括节点之间的相对位置和相对速度等。
在这些算法中,节点通过交换感知数据和位置估计结果来优化自身的定位结果,从而减小定位误差。
这种算法可以通过多轮迭代来改善节点的定位精度,并且具有较好的鲁棒性。
另外,还有一些特殊的节点定位算法根据具体应用场景做了一些优化。
例如,对于密集感知网络,可以利用节点的邻居位置信息来优化节点的定位结果;对于移动感知网络,可以利用节点的运动轨迹来估计节点的位置。
综上所述,节点定位算法在分布式感知网络中起着重要的作用。
不同的算法适用于不同的应用场景和要求。
通过选择合适的节点定位算法,可以提高网络性能,实现更高级的应用,并且在一定程度上减小定位误差和通信开销。
感知位置法
• 四、第三位置:教练位置 • 1、你听到了他们两个的交流 • 2、你分别给他们两个的建议是什么 • • • • • • • 五、分别回到第一位置、第二位置重复二、三、四 最后,再回到我的位置,问: 1、这时你有什么感受,给自己的情绪打个分? 2、我愿意采取什么样的新的行动呢? 3、如果情绪低于3分的话,教练可询问客户是否需要再来一遍。 4、如果情绪高于3分的话,教练可重复上述步骤,直至情绪低于3分 为止。
• 二、第一位置
• 1、想起这段关系,你的感觉是什么? • 2、还有什么感觉呢? • 3、如果给情绪打分,最低分是0分,最高分10分是 的话,你现在是几分呢? • 4、你想对他说些什么呢?还有呢?
ห้องสมุดไป่ตู้
• • • • •
三、第二位置:对方位置 1、坐到对方的位置上 2、现在你就是对方 3、看到XX坐在对面,你有什么感觉呢? 4、你又有什么话对他说呢?
感知位置平衡法
• • • • • • • 一、感知位置平衡法 1、找两张椅子,面对面放着 2、找一个舒适的位置你先坐下,想象你要改善关系 的人坐在你的面前。 3、调整椅子的位置,直至感到舒服为止。 4、深呼吸、放松 5、想象要调整关系的人坐在对面。注意对方的身体, 把他调至正面的位置。 • 5、注意双方的视线,把他调到同一位置(平视)。 • 6、若图像为黑白色,把景象调节为彩色画面
感知定位图
定位不仅是一种思考,在实践中需要专业性的工具使之操作具体化。
定位图就是进行定位时最常使用的一种工具,科学地付诸应用,将会达到事半功倍的效果。
一、什么是定位图定位图是一种直观的、简洁的定位分析工具,一般利用平面二维坐标图的品牌识别、品牌认知等状况作直观比较,以解决有关的定位的问题。
其坐标轴代表消费者评价品牌的特征因子。
图上各点则对应市场上的主要品牌,它们在图中的位置代表消费者对其在各关键特征因子上的表现的评价。
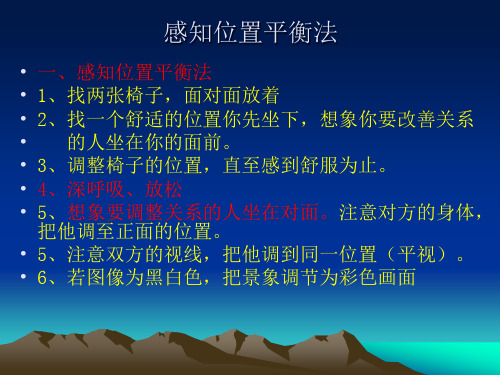
如图1所示啤酒的定位图,图上的横坐标表示啤酒口味苦甜程度,纵坐标表示口味的浓淡程度。
而图上各点的位置反映了消费者对其口味和味道的评价。
如百威(Budweiser)被认为味道较甜,口味较浓,而菲斯选(Faistaff)则味道偏苦及口味较淡。
图1:啤酒品牌定位图通过定位图,可以显示各品牌在消费者心目中的印象及之间的差异,在此基础上作为定位决策。
定位图应用的范围很广,除有形产品外,它还适用于服务、组织形象甚至个人等几乎所有形式的定位。
以下图2、图3分别为职业及美国历届总统的定位图。
图3:美国历届总统定位图如果需要作更复杂的分析(特征因子超过二个),则要用到其它的定位工具,如排比图(另文介绍)和多元分析的统计软件。
二、制作定位图的步骤(1)确定关键的特征因子这是编制定位图的关键。
特征:因子选择的正确与否决定定位图的有效果和结果,从而影响整项定位工作的成功。
定位图一般是两维的,这样是为追求其直观性。
但影响消费者决策的特征因子是多种多样的,那么该如何在复杂的诸要素中找对作为坐标变量的关键的两点呢?方法只有一个——从消费者身上找。
首先我们要通过市场调查了解影响消费者购买决策的诸因素及消费者对它们的重视程度,然后通过统计分析确定出重要性较高的几个特征因子,再从中进行挑选。
在取舍时首先要剔除那些难以区分各品牌差异的因子(如汽油的价格因子),其次要剔除那些无法与竞争品牌形成的因子。
最后一步就是在剩下的因子中选取两项对消费者决策影响最大的因子。
理解层次

理解层次是NLP界的大师罗伯特·迪尔茨根据人类学家格里高利·贝特森提出的学习与变革的逻辑层次整理出来的。
理解层次是NLP发展过程中最具影响力的理论之一。
迪尔茨提出的理解层次认为,在任何系统中,人的生活——包括系统本身的活动,都可以通过几个不同层次进行描述和理解,它们是:环境、行为、能力、信念与价值观、身份、精神。
精神:自己与整个世界其他系统的关系。
(人生的意义)身份:自己以什么身份去实现人生的意义。
(我是谁,我要怎样度过这一生)信念:配合身份,应该有什么样的信念和价值观。
(为什么做,有什么意义)能力:我有哪些不同的选择﹖我掌握了什么技能?(如何做,懂不懂)行为:在环境中我们的运作。
(做什么,有没有做)。
环境:外界的条件和障碍。
(时、地,其它人,其它事物)。
第一个层次,何时、何地、有些什么人、事、物?环境因素决定了人们活动的范围和条件。
第二个层次,是关于个人的行为及活动的,个人在环境中做了些什么动作?第三个层次,涉及到策略、技巧和能力,能力是个人在环境中用来指导行动的。
第四个层次:以上各层次都是由信念和价值观塑造的。
能力和技巧为环境中的各种行为提供了支持,而信念和价值观则为技巧和能力提供了动机和指导——为什么人们会在特定的环境中以特定的方式做事情。
信念和价值观提供了一个强化的过程,这个强化过程支持我们特定的能力或行为,信念和价值观决定了我们如何为事情赋予意义。
第五个层次:信念和价值观支撑着个人的身份定位——即在某时间、某地点做什么,如何做,为什么做等问题背后的“我是谁”的问题。
身份通过一系列具有优先次序的信念和价值观表现出来;而这些信念和价值观是由更大范围的技巧和能力支撑的,反过来技巧和能力又展示了特殊的信念和价值观;高效的能力产生了一个更大范围的具体行为和活动,这些行为和活动是在很多特定的环境和条件下完成的,实现了对信念和价值观的维护与追求。
第六个层次:身份层次涉及人们的愿景以及他们所属的更大的系统。
空间感知训练

空间感知训练空间感知是指人们对周围环境的感知和理解能力,它在我们的日常生活中扮演着重要的角色。
一个良好的空间感知能力可以帮助我们更好地定位自己和他人,迅速适应环境变化,并且在空间导航、运动协调等方面表现出色。
因此,进行空间感知训练对于提升个体的空间认知能力具有重要意义。
一、空间感知训练的意义通过空间感知训练可以增加个体的空间意识和空间认知能力,提升个体在空间导航、方向判断、运动协调等方面的表现。
具体来说,空间感知训练可以帮助我们:1. 提高方向判断能力:通过空间感知训练,我们可以学会利用环境的特征来判断方向。
例如,通过观察太阳的位置和光线的方向,我们可以迅速判断出东、南、西、北的方向。
2. 增强视角变换能力:空间感知训练可以帮助我们学会在不同视角下理解和认知环境。
例如,我们可以通过观察和体验不同的角度和高度,掌握建筑物和地形的特征,从而更好地进行地图阅读和空间导航。
3. 提升运动协调能力:空间感知训练可以改善我们的身体协调性和运动能力。
例如,通过进行平衡练习、空间定向游戏等活动,可以加强我们的平衡感和运动控制能力,进而提高我们在空间中的操作和运动能力。
二、实施空间感知训练的方法1. 视觉训练:通过观察和感知周围环境的特征来提高空间感知能力。
可以选择在不同环境中进行观察,如城市街道、自然景观等,观察和识别不同特征和细节,如建筑物的形状、道路的走向等。
2. 视角训练:通过改变自身的视角和角度,增强空间认知能力。
可以选择进行视角转换的活动,如登山、攀岩等,体验不同高度和角度下的环境和空间结构,加深对空间关系的理解和记忆。
3. 方向判断训练:通过学习和练习方向判断的方法,提高方向感知能力。
可以进行方位判断游戏,如找寻指定方位的目标,标示不同方位的指示牌等,培养自己在空间中快速准确地判断方向的能力。
4. 运动协调训练:通过进行平衡练习、跳跃、拍球等活动,提高身体的动作协调性和空间感知能力。
可以选择一些有趣的运动项目,如舞蹈、武术等,锻炼身体的平衡感和空间感知能力。
判断位置的方法
判断位置的方法判断位置是指通过各种方式确定物体的具体位置或者相对位置。
下面是关于判断位置的10种方法,并展开详细描述。
1. 眼睛观察法:使用眼睛直接观察物体的位置,例如通过看物体在房间的具体位置来确定物体的位置或者相对位置。
2. 运动判断法:观察物体的运动状态来判断其位置或者相对位置。
观察物体是静止的还是在移动,以及物体的移动方向和速度等。
3. 触摸感知法:通过触摸物体来判断其位置或者相对位置。
用手指触摸物体的表面来判断物体的位置是在手指的上方还是下方。
4. 声音感知法:通过听觉感知来判断物体的位置或者相对位置。
借助声音的音量和方向来判断声音的来源位置。
5. GPS定位法:利用全球定位系统(GPS)来判断物体的具体位置,通过接收卫星信号,并进行计算来确定物体所在的经度和纬度。
6. 磁感应法:利用物体周围的磁场来判断物体的位置。
利用磁罗盘来确定物体相对于地球磁北极的位置。
7. 光学测量法:使用光学器具和测量仪器来进行测量,从而判断物体的位置。
使用激光测距仪来测量物体与测量仪之间的距离。
8. 标记定位法:通过在物体或者环境中设置标记点或者标志物,来确定物体的位置。
在地图上使用标记点来表示物体所在的位置。
9. 热感应法:利用物体周围的热量来判断物体的位置或者相对位置。
使用红外线热成像仪来观察物体的热辐射图像。
10. 行为模式判断法:通过观察物体的行为模式来判断其位置或者相对位置。
观察物体的活动范围、行动路径和驻留时间等来判断其位置。
以上就是关于判断位置的10种方法,并对每种方法进行了详细描述。
这些方法可以通过不同的感知方式来判断物体的位置,从而在实际应用中帮助我们更好地了解和掌握物体的空间位置。
感知位置平衡法

母亲
父亲
(五)、孩子的自我保护会使父 母的努力前功尽弃------ “倒三角 形”
母亲
父亲 •
当孩子在学习上遇到了困难, 做父母的又不能有效的帮助 他,这时候他就会躲到父母 的身后,让父母去面对前面 的压力和阻力,这就成了一 个倒三角形。 • 在这种情况下,无论父母多 么努力,做了多少工作,只 要孩子的自我保护(实际上 就是一种逃避)不解除,他 就不会努力向前。 • 出现这种倒三角状态的时候, 孩子就出现了厌学。
• 因为信念﹑价值观和规条大部分存在于潜 意识里,故此人们往往忽略了在沟通和人 际关系情况下存在的共同信念和共同价值, 更因此看不到怎样凭改变规条便能够改善 沟通和关系的机会。感知位置平衡法便是 一套针对这点的技巧。
• 最初发展“感知位置”这套技巧时,只有 3个位置,就是: • 我────第一位置 • 对方───第二位置 • 抽离───第三位置 • 随后经过不断的发展,很多不同意义的位 置出现。以下仅介绍一些容易掌握的其它 位置。 •
• 传统上,做”和事佬”需争吵双方同时列席。这 个“感知位置平衡法”则可以在另一方不在场的 情况下,改变一个人对另一个人的看法(感知模 式)。因为一个人的思想和身体由内心支配,对 另一个人的感知模式改变了,面对那个人的时候, 声调﹑身体语言﹑所选用的文字,因而说话和行 为模式都会有所改变,沟通效果和关系便会因此 而有所不同。 •
孩子
母亲 父亲
• 从图形上我们可以看到,父母之间的关系较为 “疏远”,他们都与孩子保持了相等的距离。 • 在这种情况下,即使父母给孩子均衡的、同方向 的、较大的力量,但是在孩子身上合成的力量, 很难抵御前方的较大压力或阻力。而且,还会有 被压力或阻力击垮的可能性。
(三)、无法给孩子足够支持力 的家庭关系-------“任意三角形”
基于RFID技术的位置感知中定位方法概述

基于RFID技术的位置感知中定位方法概述作者:付志学纪秀赵吉业来源:《山东工业技术》2014年第21期摘要:RFID是无线射频技术,现在已经广泛应用于工业、物流等方面的电子身份识别和跟踪定位。
首先,介绍RFID技术的构成以及应用范围;其次,介绍、分析几类不同的RFID 定位方法及其影响定位精度的因素;最后,指出了RFID位置感知中定位方法的发展趋势。
关键词:RFID;定位算法;发展趋势0 引言RFID技术是一种基于无线射频的自动识别技术,它可以通过无线信号的发射、获取来识别需要定位的特定目标,并且可以读取目标携带的有关数据[1]。
RFID技术有着诸多的优点:成本低廉、非视距、非接触、定位精度高。
1 RFID技术概述(1)RFID系统组成。
RFID(Radio Frequency Identification)技术,又被称为无线射频识别技术,它是一种无线通信技术,RFID技术不需要识别系统和特定目标建立机械或者光学接触就能识别特定目标并且读写相关的数据,常用的频段有:低频(125K~134.2K)、高频(13.56Mhz)、超高频(2.4Ghz)等。
一个典型的RFID定位系统主要有以下部分组成:数据处理端、定位标签、读写器、以及天线等[2]。
每个部分的组成和功能如下所述:定位标签:标签主要有耦合单元和处理芯片组成,每个芯片里存储有该标签的电子编码,以及相关数据,可分为有源、无源和半有源三种标签。
阅读器:阅读器的任务是通过无线射频发射和接收来读取定位标签的电子编码以及标签里存储的数据,然后将所得的识别信息连同获得的标签数据传输到数据处理端以供处理。
天线:天线用来在标签和阅读器之间进行无线射频信号的传递。
数据处理端:软件管理人员可以通过相关的应用软件来对RFID系统进行设置,同时获得位置信息。
(2)RFID定位技术的应用。
自从第一个实用的RFID电子收费系统在挪威进行了应用尝试后,RFID技术的应用领域得到了不断的发展。
教学设计《认位置》
教学设计《认位置》一、课前交流激发兴趣同学们知道今天我们为什么来多媒体教室上课吗?同学们,你们现在已经是一名小学生了,哪位小朋友能告诉老师在课堂上应怎样做呢。
遵守纪律。
认真听课。
同学们说得很好,老师希望大家能按照刚刚说得去做,好不好?(好)我们现在开始上课。
二、做游戏认识左右1、做“听口令做动作”的游戏大家喜欢做游戏吗?(喜欢)这节课我们一起来做有趣的游戏。
(板书:有趣的游戏)游戏的名字叫“听口令做动作”,老师说你们做,看谁做得又对又快。
先把你的手放在鼻子上,老师说哪你就指哪。
注意听,准备:指耳朵(大家手不要放下来,相互看一下,谁错了帮助改正过来。
)指眼睛鼻子头发脸蛋(同学们真棒,都指对了,反映很快。
)2、增加游戏难度引出左右下面老师要增加难度了,仔细听:指左耳(你指的是左耳吗?想一想,应该是哪只耳朵。
)指右眼(手不要放下来,同桌相互看看,有没有错误,应如何改正。
)指左眼指右耳我发现小朋友们这次速度慢了,而且还有出错的地方,那大家想一下,我们这次的游戏比上次难在什么地方?增加了左右(板书:左右)(真是位些认真听讲的好孩子)3、认识左右手及其在生活中的作用渗透思想教育大家举一下你的右手。
(真聪明,都举对了)右手的这边就是右边。
那右手都能干些什么呢?写字画画吃饭时拿筷子(真是些爱动脑筋、细心观察的好孩子)右手的作用可真大!我们的另一只手是左手,左手又能干什么呢?吃饭时拿馒头写作业时按本子对,我们一般情况下做事情时,都是以右手为主左手帮助一起来做,可见左右手是一对好朋友。
我们同学们之间也应该互相团结、互相帮助,这样才能做更多的事情。
4、认识身体中其它一左一右的好朋友哪位小朋友能告诉大家,在我们的身体中还有哪些这样的好朋友?左耳右耳用手指一下你的左耳右耳。
左脚右脚跺一下你的左脚,再跺一下你的右脚。
左眼右眼指一下你的左眼右眼左肩右肩拍一下你的左肩,再拍一下你的右肩。
5、增加“听口令做动作“游戏的难度稳固左右的知识师:小朋友们真棒,这么短时间就能分清左右了,那我们把刚刚的游戏再增加一下难度,注意仔细听:左手指左耳(不要放下手,想想指的对不对,自己改正过来)右手指右耳(这次有进步,不过还要继续努力哟)认真听,下面还有:左手指左肩右手指右肩(不错,都指对了,真棒)下面我们又要增加难度了,注意听:左手指右肩右手指左肩(同学们真棒,做得不错。
无人驾驶汽车中的感知技术及其应用

无人驾驶汽车中的感知技术及其应用无人驾驶汽车即自动驾驶汽车或自动驾驶车辆,是指无需人类驾驶员参与的车辆。
它们通过使用感知技术以及其他先进技术,能够在没有人类干预的情况下安全地执行驾驶任务。
感知技术是无人驾驶汽车实现自主导航和避免碰撞的关键。
本文将重点探讨无人驾驶汽车中的感知技术及其应用。
无人驾驶汽车的感知技术可以分为三个主要方面:环境感知、障碍物检测和识别以及位置定位。
环境感知是指无人驾驶汽车通过使用各种传感器来获取车辆周围环境的信息。
这些传感器可包括相机、激光雷达、毫米波雷达、超声波传感器等。
相机可以提供高分辨率的图像,激光雷达可以测量物体的距离和位置,而毫米波雷达则可以在恶劣的天气条件下进行准确定位,超声波传感器则可以检测靠近车辆的物体。
通过将这些传感器的数据进行融合,无人驾驶汽车可以准确地感知到其周围的环境,包括道路、交通标志、道路标线和其他车辆。
障碍物检测和识别是无人驾驶汽车感知技术中的另一个重要方面。
当汽车行驶时,它需要实时检测和识别道路上的障碍物,如其他车辆、行人、自行车等。
无人驾驶汽车可以通过使用计算机视觉来检测和识别这些障碍物。
计算机视觉算法可以分析传感器收集到的图像数据,并准确地识别出道路上的不同类型的障碍物。
通过将计算机视觉与深度学习相结合,无人驾驶汽车可以实现更准确、更可靠的障碍物检测和识别。
位置定位是无人驾驶汽车感知技术中的另一个重要方面。
无人驾驶汽车需要准确地知道自己在道路上的位置,并能够精确地定位到距离和方向,以便进行正确的导航和路径规划。
为了实现精确定位,无人驾驶汽车通常使用全球定位系统(GPS)以及惯性导航系统(INS)来确定车辆的位置、姿态和速度。
此外,为了提高定位精度,无人驾驶汽车还可以利用地图数据和车载传感器进行增强定位。
无人驾驶汽车中的感知技术不仅有助于实现自主和安全的驾驶,还可以在许多领域中应用。
以下是几个重要的应用领域:1. 减少交通事故:无人驾驶汽车能够准确地感知和识别道路上的障碍物,并可以实时采取避免碰撞的措施,从而大大降低交通事故的发生率。
位置觉的检查方法
位置觉的检查方法背景介绍位置觉是人体感知能力的一种,通过感知肌肉、关节和皮肤的变化,来确定身体在空间中的位置和动作状态。
位置觉是维持身体平衡、运动协调和精细运动的重要基础。
位置觉异常可能导致运动障碍、平衡困难等问题。
位置觉异常的常见症状包括走路不稳、手脚不协调、姿势不稳定等。
因此,对位置觉进行检查是非常重要的。
下面将介绍一些常用的位置觉检查方法。
1. 力触觉检查力触觉检查是检查位置觉的一种重要方法。
力触觉分为静态力触觉和动态力触觉两种。
静态力触觉是指对身体部位施加一个静态的力,观察被试者是否能准确感知到这个力的大小和方向。
常用的检查方法包括:使用力传感器进行测量、让被试者闭眼并把手臂伸出来,医生在手臂上施加不同大小的力让被试者感知。
动态力触觉是指对身体部位施加一个动态的力,观察被试者是否能准确感知到这个力的变化。
常用的检查方法包括:使用振动器进行振动刺激、让被试者闭眼并让医生快速移动被试者的手臂,观察被试者能否感知到移动的方向和速度。
2. 位置知觉检查位置知觉是指被试者对身体部位的位置和姿态的感知能力。
对位置知觉进行检查主要包括两个方面:被试者能否准确感知身体部位的位置和能否感知身体部位的姿态。
常用的位置知觉检查方法包括:被试者闭眼并让医生移动被试者的手臂或腿部,被试者需要准确指出移动后的手臂或腿部的位置;使用角度计对被试者进行姿势调整测试,被试者需要准确感知自己的姿势。
3. 皮肤知觉检查皮肤知觉是指被试者对皮肤的触觉和压痛的感知能力。
对皮肤知觉进行检查主要包括检查被试者对轻触、刺激和疼痛的感知能力。
常用的皮肤知觉检查方法包括:使用尖刺针对被试者的皮肤进行轻触或刺激,被试者需要准确报告感觉;使用疼痛阈值测试仪对被试者进行疼痛阈值的测试,观察被试者对不同程度的疼痛刺激的反应。
综上所述,位置觉的检查方法主要包括力触觉检查、位置知觉检查和皮肤知觉检查。
这些检查方法可以帮助医生判断被试者位置觉是否异常,为进一步的治疗和康复提供参考依据。
电驱动位置传感器工作原理

电驱动位置传感器工作原理
电驱动位置传感器是一种用于测量物体位置或运动的设备,它通过电信号来驱动和感知位置。
其工作原理包括以下几个方面:
1. 电信号驱动:电驱动位置传感器通常通过电信号来驱动物体的运动。
这些电信号可以是直流电压或交流电压,它们会被传感器内部的电路处理和放大,然后通过驱动装置将电信号传递到物体上。
2. 传感器位置检测:传感器会通过不同的方式来感知物体的位置。
例如,某些传感器可能使用磁场来检测物体的位置,这包括使用霍尔效应或磁感应定位方法。
其他传感器可能使用光学方法,例如使用红外线或激光来测量物体的位置。
3. 位置反馈:一旦传感器检测到物体的位置,它会将这些信息反馈给控制系统。
这些反馈信息可以用于控制物体的位置或速度,以实现预定的目标。
4. 数据处理:传感器通常还包括一些数据处理功能,以提供更准确和可靠的位置测量。
这可能涉及滤波、校准和校正等技术,以确保测量结果的准确性和一致性。
总的来说,电驱动位置传感器通过电信号来驱动和感知物体的位置,从而实现对物体位置或运动的测量和控制。
这些传感器通常具有高分辨率、高精度和可靠性,被广泛应用于各种领域,例如机械工程、自动化控制等。
幼儿园小班方向感知教学方案 幼儿园教案
幼儿园小班方向感知教学方案一、引言方向感知是幼儿学习中的重要认知能力,它不仅是孩子们在生活中进行方向判断和行为决策的基础,还是后续学习活动的基础。
幼儿园小班阶段,孩子们正处于认知发展的重要时期,如何有效地开展方向感知教学成为了幼儿园教育工作中的一项重要任务。
为此,我们制定了以下幼儿园小班方向感知教学方案。
二、教学目标1. 帮助幼儿建立基本的方向感知能力,包括认识东、南、西、北等基本方位;2. 培养幼儿的观察力和分析能力,提高他们对周围环境的认知;3. 培养幼儿的空间定位能力,能够在室内外环境中进行方向判断和行为决策。
三、教学内容安排1. 初步认识方位:通过故事、游戏等形式,让幼儿初步了解东、南、西、北等基本方位的概念;2. 方位识别练习:通过室内外环境的教学活动,引导幼儿在实际操作中识别各个方位;3. 方位概念巩固:巩固幼儿对各个方位的认识,引导他们在日常生活中多次运用方位概念;4. 方位感知综合训练:通过游戏、社会活动等形式,帮助幼儿进行方位感知的综合训练,提升他们的方向感知能力。
四、教学方法1. 故事引导法:通过生动有趣的故事,引导幼儿初步了解方位概念;2. 观察练习法:引导幼儿观察周围环境,识别各个方位;3. 实践操作法:在游戏、手工等实际操作中,引导幼儿多次进行方位感知的实践操作,巩固方位概念;4. 情景模拟法:通过模拟真实生活场景,帮助幼儿进行方位感知综合训练,提升他们的方向感知能力。
五、教学评估1. 观察记录:教师通过观察幼儿在教学活动中的表现,记录幼儿对方向感知的掌握情况;2. 活动测评:通过游戏、手工等活动进行方向感知能力的测试,评估幼儿在实际操作中的表现;3. 知识问答:在课堂上进行知识问答环节,检验幼儿对方位概念的掌握情况。
六、教学资源准备1. 教学用具:包括教学图片、模型、实物等,用于引导幼儿认识方位;2. 教学环境:幼儿园室内外环境的布置,便于幼儿在实际操作中进行方位感知的练习;3. 教学材料:包括故事书籍、游戏道具、手工材料等,用于开展方向感知教学活动。
视觉定位原理
视觉定位原理视觉定位是指通过视觉感知来确定自身在空间中的位置和姿态的能力。
在人类和动物的生活中,视觉定位是一种非常重要的感知能力,它直接影响着个体的生存和行为。
而在现代科技领域,视觉定位也被广泛应用于机器人、自动驾驶、虚拟现实等领域。
本文将介绍视觉定位的原理和应用。
视觉定位依赖于感知系统对环境的感知和理解。
在传感器感知到环境信息后,通过计算和分析,确定自身在空间中的位置和姿态。
视觉定位的原理主要包括特征提取、特征匹配和姿态估计三个步骤。
首先是特征提取,即从环境中提取出能够用于定位的特征。
在视觉定位中,常用的特征包括角点、边缘、直线等。
这些特征在图像中具有显著性,能够帮助系统进行定位。
接下来是特征匹配,即将感知到的特征与地图中的特征进行匹配。
地图可以是事先建立好的,也可以是实时构建的。
通过特征匹配,系统可以找到感知到的特征在地图中的对应物体,从而确定自身的位置。
最后是姿态估计,即根据匹配到的特征,估计自身在空间中的姿态。
姿态包括位置和方向两个方面,通过特征匹配得到的信息,可以帮助系统确定自身的姿态。
视觉定位在现代科技中有着广泛的应用。
在自动驾驶领域,车辆需要通过视觉定位来感知周围的环境,确定自身的位置和行驶方向,从而实现自动驾驶。
在机器人领域,机器人需要通过视觉定位来导航和避障,完成各种任务。
在虚拟现实领域,通过视觉定位可以实现虚拟环境和真实环境的融合,为用户提供更加沉浸式的体验。
总之,视觉定位是一种重要的感知能力,它可以帮助个体感知和理解周围的环境,确定自身在空间中的位置和姿态。
在现代科技领域,视觉定位有着广泛的应用前景,将会为人类生活和工作带来更多的便利和可能性。
一个位置感知沟通具体案例,包含四个感知位置
一个位置感知沟通具体案例,包含四个感知位置
“位置”指的是看问题的角度。
不同的人由于身份、经历、价值观等的不一样,看问题的角度、对事物的感知和理解自然也不同。
“位置感知法”是通过带领当事人站在不同人的位置去感受对方甚至第三者的感受,让当事人从不同角度去看待同一件事情。
简单来说,就是从别人的眼睛看事物,这其中比较重要的三个问题是:“如何换位?感知什么?怎么感知?”位置感知法认为,人们对同一个事物的理解至少有四个角度。
第一角度:自己。
即用自己的观点和信念来看待人、事、物。
第二角度:对方。
即将自己想象成冲突或对立的另一方,用对方的观点和信念来看待人、事、物。
第三角度:旁观者。
即把自己想象成旁观者,回看事件中的自己和对方的关系。
第四角度:系统。
即从除了自己、对方和旁观者以外更大群体的角度来看待人、事、物,如班集体、学校、家庭、社会等。
通常在这个角度上,我们要追求的是整体平衡,取得三赢效果。
运用位置感知法带领学生从自己的感受中走出来,去感受对方的感受,更重要的是考虑到更大的系统,如对整个班级的影响,这样往往能达到舍己利人的效果,使学生自觉纠正不良行为。
从旁观者的角度抽离出来看问题,接着看最大的系统,然后换位思考想对方所想,再回看自己的利益就变得很渺小了,最后回到整个系统,追求整体的
平衡,取得三赢的效果。
运用位置感知法,从不同的角度看待问题,按照角度顺序理解事情,感知的不仅是自己的感受、对方的感受,还有旁观者的感受和对整个系统的影响。
每一次角度转换都是一次对思维定式的破框,会给当事人带来崭新的体验,帮助其检验自己的想法是否符合三赢的原则,从而修正自己的行为。
人体怎样感知位置变化和保持平衡的
人体平衡与前庭功能
人体平衡的保持是一个复杂的生理过程,需要前庭觉,视觉和本体感觉三个系统参与并协同完成。
1前庭觉:前庭是内耳的一部分,可以感知头位变化,
前庭感觉系统在维持身体平衡,姿势稳定起主导作用。
2视觉:在正常情况下,视觉的主要作用是帮助定向,
即在前庭感觉的基础上识别各个方向的标志o
3本体感觉:是指肌肉,关节等运动器官在运动或静
止时产生的感觉。
负责前庭功能的器官称为前庭器,位于内耳,包括3个半规管(外,上和后半规管),椭圆囊和球囊。
椭圆囊和球囊中各有一囊斑,又称耳石器。
这些都是前庭末梢感受器。
半规管一段稍膨大处有位觉感受器,能感受旋转运动的刺激, 通过它引起运动感觉和姿势反射,以维持运动时身体的平衡。
椭圆囊和球囊感受直线加速度,提供地心引力有关的头部方位的信息。
例如坐在行进的车中即使闭上眼睛,不看窗外,也可感知车的加速、减速或转弯;又如乘坐电梯时那种升、降的感觉,这些都是半规管、球囊内的耳石器感知的。
当椭圆囊耳石膜上的耳石脱落到半规管里,人体就会失去平衡,重者表现为天旋地转,恶心,呕吐,浑身出汗,轻者整日头昏、头沉,记忆力下降,站立不稳等症状,此病以复位治疗为主。
内耳:前庭末梢感受器-耳蜗。
方位知觉的措施

方位知觉的措施引言方位知觉是指人们对于自己在空间中位置以及与周围环境的相对方位关系的感知能力。
在日常生活中,我们常常需要准确地感知自己的方位,以便进行导航、确定路线或避免碰撞等操作。
然而,由于环境的复杂性以及自身感知能力的限制,我们有时会出现方位感的混乱和误判。
因此,在设计和规划空间时,可以采取一些措施来增强和改善方位知觉。
本文将介绍一些常用的方位知觉措施,旨在提供有关方位知觉的有效方法和技巧。
措施一:参照物和标志物的设计在设计空间时,合理规划和设置参照物和标志物对于增强方位知觉至关重要。
参照物是指固定在空间中的物体或结构,例如建筑物、地标、道路或其他突出的景观特征。
标志物是指在空间中设置的指示物,例如路牌、指示标志或标线等。
通过设置明确的参照物和标志物,人们在空间中可以更容易地确定自己的方位,并进行准确的导航和位置确认。
措施二:光线和色彩的运用光线和色彩是另一个可以增强方位知觉的重要因素。
通过合理运用光线和色彩,可以创造出明暗的对比和颜色的差异,从而帮助人们更好地感知方位。
例如,在室内空间中,可以使用窗户和天窗增加自然光的进入,提供空间的明亮度和明暗的对比。
此外,可以利用不同色彩和颜色的变化来区分不同空间和方位,例如使用不同颜色的地砖、墙壁或装饰物等。
措施三:声音的引导声音是另一个可以用来增强方位知觉的重要因素。
通过合理设置声音的源头和方向,可以帮助人们更准确地感知自身的方位。
例如,在公共交通设施中,可以设置导航广播或语音提示,帮助乘客准确地识别自己所在的位置和出口的方向。
此外,通过在空间中设置音响系统或扬声器,可以将声音引导到特定的方向,帮助人们确定自身的方位。
措施四:符号和图示的运用符号和图示是一种常用的方位知觉措施。
通过在空间中设置符号和图示,并提供解释和说明,人们可以更容易地理解和识别自己的方位。
例如,在地铁站或公交站台,可以设置地图和标识牌,指示乘客所在的位置和方向。
此外,还可以使用箭头、指示图标或其他符号来引导人们正确地行走和导航。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
21
感知位置案例运用:老板见到员工迟到…
• 第一身:“你又迟到!” • 第二身:“如果你是我,你的下属时时迟 到,你会怎么办?”(让员工自我觉察) • 第三身:“如果你迟到,别的不迟到的同 事会怎么看呢?”“如果大老板来看到, 我不处理,他会怎么认为呢?” • 第四身:宏观角度:“如果客户看到我们 公司有人迟到,会对我们公司的看法如何 呢?” 22
5
5
感知位置法
第三身 3rd Position
在“第三身”的角度观看自己与对方的关系。
用自己代入“观察者”或“见证者”的位置。 用“第三身”语言来形容自己活对方。 “他是。。。” “他们事。。。”等
12/13/2018
上海慧百文化传播有限公司
6
感知位置法
第四身 4th Position 结合整个系统的角度。 体验及了解团队和全个系统的利益整体平衡。 产生“群体思维”或“团队精神”的全面角度。 用“第一身”的众数语言。 我们。。。” “大家。。。”等
13
感知位置法
第一 身 第二身 第三 身 第四身
比较 正面 有立场 有主见 同理心 关心对方 冷静 有智慧 了解整个 系统平衡
比较 负面
自我,固 执 不了解别 人的感受
个人立场 浮动容易 受别人的 影响
抽离 ,冷 个人渺小, 漠 存在不重 要 旁观者
12/13/2018
上海慧百文化传播有限公司
14
14
感知位置法 位置感知法的威力: ◆ 深深体验每一个不同的位置及其关 系。 ◆ “创造力”是由“三个描述”角度 所牵动的。
◆ 引发无穷无尽的可能性。
◆ 通过在不同感知角度的游走观察, 开启了智慧。
12/13/2018
◆
15 上海慧百文化传播有限公司 大大改善了沟通,创造了“整体平
12/13/2018
上海慧百文化传播有限公司
4
4
感知位置法
第二身 2nd Position
结合对方的观点、信念、预设。
从对方的眼睛看世界。 用“第二身”语言谈论自己。 “ 你是。。。” “你看来。。。”等
12/13/2018
上海慧百文化传播有限公司
12/13/2018
上海慧百文化传播有限公司
7
感知位置法
第五身 5th Position
在第一身至第四身各个角度游走,平衡各方利益。
12/13/2018
上海慧百文化传播有限公司
8
8
感知位置法
第一身 1st Position 我在投入。 全力以赴,追求卓越!
12/13/2018
上海慧百文化传播有限公司
11
11
感知位置法
第四身 4th Position 摄影录像 宏观灵活,团体利益!
12/13/2018
上海慧百文化传播有限公司
12
12
感知位置法
第五身 5th Position 各方游走
智慧教练,系统平衡!
12/13/2018
上海慧百文化传播有限公司
9
9
感知位置法
第二身 2nd Position 对方棋手 知己知彼,同感同理!
12/13/2018
上海慧百文化传播有限公司
10
10
感知位置法
第三身 3rd Position 旁观者清, 客观冷静! 观棋君子
抽离 冷漠的 旁观者
比较 (负面)
自我 固执 不了解别人 的感受
渺小 个人的 存在 不重要
17
感知位置法的威力
1深深体验每一个不同的位置及其关系 2“创造力”是由《三个描述》角度牵动的, 3引发无穷无尽的可能性. 4通过于不同感知角度的转动观察,开启了智 慧. 5大大改进了沟通及创造“整体平衡”的效果
感知位置法
智慧来自于多角 度的视野 谈判高手是永远站在对 方角度思考的人
4000116220
感知位置法 —— 从别人的眼睛 看事物
12/13/2018 上海慧百文化传播有限公司 3
3
感知位置法
第一身 1st Position 结合自己的观点、信念、预设。 从自己的眼睛看世界。 用“第一身”语言谈论自己。 位置感知法“我看到。。。” “我感到。。。” “我听到。。。”等
20
凯文· 卡特本人几乎从一开始便处于冲突的痛苦之中。他在抢拍完之 后,实在不愿再看下去那个极端对立、极其冷酷的场面,于是,他把 秃鹰轰走。过了一段时间,他看到,那个小女孩用尽所有力气爬起来, 重新艰难地向救济中心挪动……望着小女孩的身影,凯文· 卡特内心 充满了矛盾、愧疚和痛苦。他在一棵树旁坐了下来,一边抽着烟,一 边泪流满面。后来,他曾对人说:“当我把镜头对准这一切时,我心 里在说‘上帝啊!’可我必须先工作。如果我不能照常工作的话,我 就不该来这里。”
19
影响全世界的一张新闻摄影
这张照片是凯文卡特,赢得九四年普林策新闻特写摄影奖的作品。那 是一个苏丹女童,即将饿毙跪倒在地,而兀鹰正在女孩后方不远处, 虎视眈眈,等候猎食女孩的画面。这张震撼世人的照片,引来诸多批 判与质疑。当人们纷纷打听小女孩的下落,遗憾的是,卡特也不知道。 他以新闻专业者的角色,按下忪门,然后,赶走兀鹰,看着小女孩离 去。在他获颁这一生最高的荣誉,两个月之后,卡特自杀身亡。道德 良心上的遣责,可能是卡特无奈结束生命的原因之一吧?
感知位置法
第五身:在第一身至第四身各个角度游走,平衡各 方利益
卓越是从第一身角度出发, 全力以赴、做得最好、活出承诺 智慧就是能够在 自己对方及观察者位子不停游走;
16
感知位置法
第一身
比较 (正面) 有立场 有主见
第二身第三身Fra bibliotek第四身
了解整个 系统平衡
冷静 同理心 有智慧 及关心对方 智者 个人立场 浮动 容易受人 影响
18
影响全世界的一张新闻摄影
• 普利策新闻奖是美国新闻界最高奖。在1994年4月公布的获奖名单中, 共有14个奖项,“特写性新闻摄影”(Feature Photography)奖项获 得者是南非“自由记者”(freelancer)凯文· 卡特拍摄的一张苏丹小女 孩的照片。然而,就在普利策颁奖仪式结束3个月后,即1994年7月 27日夜里,警察在南非东北部城市约翰内斯堡发现凯文· 卡特用一氧 化碳自杀身亡。