特殊指令
十个特殊指令

十个特殊指令(域开关),分别是数组\A、括号\B、平移\D、分式\F、积分\I、列表\L、重叠\O、根号\R、上下标\S、框\X,每个开关又有若干个选项,用以精确调节格式。
域代码: {EQ \a(100,2,31) } 讲解: {EQ\列表(100,2,31排成一列)}可用参数:\al左对齐;\ac居中;\ar右对齐;\con元素排成 n 列;\vsn行间增加 n 磅;\hsn列间增加n磅\al左对齐域代码: {EQ \a\al(100,2,31)} 讲解: {EQ \列表\左对齐(100,2,31)}\ac居中域代码:{EQ \a\ac(100,2,31) } 讲解:{EQ \列表\居中对齐(100,2,31)}\ar右对齐域代码:{EQ \a\ar(100,2,31) } 讲解:{EQ \列表\右对齐(100,2,31)}\con元素排成n列域代码:{EQ \a\co3(10,2,31,0,1,0,14,3,55)} 讲解:{EQ \列表\元素排成3列(10,2,31,0,1,0,14,3,55)}\vsn 行间增加n磅域代码:{EQ \a\co3\vs2(10,2,31,0,1,0,14,3,55)} 讲解:{EQ \列表\元素排成3列\行间增加2磅}\hsn 列间增加n磅域代码:{EQ \a\co3\vs2\hs4(10,2,31,0,1,0,14,3,55)} 讲解:{EQ \列表\元素排成3列\行间增加2磅\列间增加4磅}域代码:{EQ \b( \a(100,2,31)) } 讲解:{EQ \加括号( \数组(100,2,31))}可用参数:左括号使用字符* \lc\*;右括号使用字符* \rc\* ;左右括号都使用字符* \bc\*\lc\* 左括号使用字符*域代码:{EQ \b\lc\|( \a(100,2,31))} 讲解:{EQ \加括号\左括号使用字符|( \数组(100,2,31)) }\rc\* 右括号使用字符*域代码:{EQ \b\rc\|( \a(100,2,31)) } 讲解:{EQ \加括号\右括号使用字符|( \数组(100,2,31))}\bc\* 左右括号都使用字符*域代码:{EQ \b\bc\|( \a(100,2,31)) } 讲解:{EQ \加括号\左右括号使用字符|( \数组(100,2,31)) }注意:如果指定的字符*是 { 、[ 、( 、或 <,Word 将使用相应的字符作为右括号。
命令方块指令大全

命令方块指令大全在Minecraft游戏中,命令方块是一种特殊的方块,它可以执行各种指令来改变游戏中的环境和玩家的状态。
命令方块的使用可以为游戏增添更多的乐趣和挑战,同时也可以帮助玩家更好地管理游戏中的资源和情境。
本文将为大家介绍一些常用的命令方块指令,希望对大家在游戏中的使用有所帮助。
1. /give @p command_block。
这个指令可以让玩家获得一个命令方块。
在游戏中,玩家可以使用这个指令来获取命令方块,从而进行各种有趣的操作和创造。
2. /setblock ~ ~ ~ command_block。
这个指令可以在指定的坐标位置生成一个命令方块。
通过这个指令,玩家可以在游戏中的特定位置放置命令方块,方便进行后续的操作和指令执行。
3. /fill x1 y1 z1 x2 y2 z2 command_block。
这个指令可以在指定的区域内生成命令方块。
玩家可以使用这个指令来一次性放置多个命令方块,从而实现更复杂的指令操作和游戏场景设计。
4. /testfor @p[r=5]这个指令可以检测玩家周围是否有其他玩家。
通过这个指令,玩家可以在游戏中实现一些基于玩家位置的指令操作,增加游戏的互动性和趣味性。
5. /tp @p x y z。
这个指令可以将玩家传送到指定的坐标位置。
在游戏中,玩家可以使用这个指令来实现快速移动和传送,方便进行游戏中的各种活动和任务。
6. /execute @e[type=sheep] ~ ~ ~ setblock ~ ~-1 ~ wool 1。
这个指令可以让指定类型的实体执行指定的操作。
通过这个指令,玩家可以实现对游戏中的各种生物和实体进行特定的指令操作,增加游戏的趣味性和挑战性。
7. /fill x1 y1 z1 x2 y2 z2 air。
这个指令可以在指定的区域内清空方块。
玩家可以使用这个指令来快速清理游戏中的建筑和场景,方便进行后续的建设和创作。
8. /weather clear。
codesys s指令用法

codesys s指令用法
CODESYS是一种用于编写和运行PLC(可编程逻辑控制器)程序的软件平台。
在CODESYS中,S指令是一种特殊类型的指令,用于执行速度控制和位置控制。
以下是使用CODESYS中的S指令的基本步骤:
1. 在PLC程序中定义变量:首先,需要在PLC程序中定义用于存储速度和位置的变量。
这些变量可以是整数、浮点数或实数,具体取决于控制要求。
2. 编写S指令:在CODESYS中,可以使用S指令来控制伺服电机的速度和位置。
S指令的语法如下:
```
S <速度变量>
```
其中,`<速度变量>`是之前定义的用于存储速度的变量。
3. 配置运动控制器:在使用S指令之前,需要配置运动控制器。
运动控制器是PLC中的一个特殊功能块,用于处理运动控制任务。
在CODESYS中,可以使用MC_MoveAbsolute或MC_MoveRelative等指令来配置运动控制器。
4. 运行程序:在完成上述步骤后,可以运行PLC程序。
当程序运行到S指令时,运动控制器将根据指定的速度变量来控制伺服电机的速度和位置。
需要注意的是,具体的S指令用法可能因不同的PLC型号和编程环境而有所不同。
因此,在使用CODESYS中的S指令时,建议参考PLC制造商提供的编程手册或用户指南,以确保正确使用S指令并获得预期的控制效果。
arm 汇编 svc指令
其中,`<imm>`是一个立即数,用于指定服务调用的编号或标识符。具体的编号和含义 由操作系统定义,不同的操作系统可能有不同的服务调用编号。
当执行到"svc"指令时,处理器会将当前的程序状态保存起来,并跳转到操作系统的服务 处理例程。在服务处理例程中,操作系统会根据传递的服务调用编号执行相应的操作,完成 后再返回到用户程序继续执行。
arm 汇编 svc指令
在ARM汇编语言中,"svc"指令是一条特殊的指令,用于触发操作系统的服务调用( Service Call)。这条指令通常用于用户程序向操作系统发起请求,以执行一些特权操作或访 问受限资源。
"指令的语法如下:
```assembly svc <imm> ```
arm 汇编 svc指令
我的世界命令方块指令大全

我的世界命令方块指令大全在《我的世界》游戏中,命令方块是一种特殊的方块,可以通过输入指令来执行各种操作。
它们可以用于自动化、定制地图、创造互动等各种用途。
本文将为您详细介绍《我的世界》中常用的命令方块指令大全,帮助您更好地了解和利用这一功能。
1. /give @p command_block。
这个指令可以用来给予玩家一个命令方块。
在游戏中按下“T”键打开聊天栏,输入该指令并按下回车键,就可以得到一个命令方块了。
命令方块被放置后,可以右键点击来输入需要执行的指令。
2. /setblock ~ ~ ~ command_block。
这个指令可以在指定坐标处放置一个命令方块。
其中的“~”代表相对坐标,比如“~ ~1 ~”表示在当前位置上方一格放置命令方块。
这个指令可以用于自动化建造命令方块系统。
3. /fill x1 y1 z1 x2 y2 z2 command_block。
这个指令可以在指定区域内填充命令方块。
通过指定两个对角的坐标,可以在这个区域内一次性放置多个命令方块,非常适合用于大型建筑项目中。
4. /testfor @p[r=5] 。
这个指令可以检测玩家是否在一定范围内,并输出检测结果。
其中的“@p[r=5]”表示检测半径为5的范围内是否有玩家。
这个指令可以用于制作触发器和自动化系统。
5. /execute @e[type=armor_stand] ~ ~ ~ setblock ~ ~1 ~ redstone_block。
这个指令可以在指定实体(比如盔甲架)所在的位置放置一个红石方块。
通过结合不同的实体类型和坐标,可以实现各种有趣的效果。
6. /fill x1 y1 z1 x2 y2 z2 air。
这个指令可以在指定区域内清除所有方块,变成空气。
这在重置地图或者清理建筑时非常有用。
7. /clone x1 y1 z1 x2 y2 z2 x y z。
这个指令可以将一个区域内的方块复制到另一个位置。
deco指令的用法

deco指令的用法在计算机科学和编程领域,DeCo指令是一种特殊的指令,通常用于数据结构和算法的设计和实现。
DeCo代表"Decoration"或"Decorator",是一种设计模式,用于在不改变对象结构的情况下增加或修改对象的行为。
一、基本概念DeCo指令允许您为对象添加额外的功能或行为,而无需修改其基本结构。
它提供了一种灵活且可扩展的方式来扩展对象的功能。
通过使用DeCo,您可以轻松地为对象添加新的行为,而无需更改其代码。
二、指令类型DeCo指令通常包括以下几种类型:1. 装饰器函数:这种类型的DeCo函数接受一个对象作为参数,并返回一个新的对象,其中包含原始对象的新行为或属性。
2. 委托函数:这种类型的DeCo函数接受一个对象和一个函数作为参数,并使用该函数来处理原始对象的某些行为。
3. 组合函数:这种类型的DeCo函数将多个函数组合在一起,以创建一个新的函数,该函数可以在一个对象上调用多个操作。
三、用法示例假设我们有一个简单的类,它代表一个简单的矩形对象,我们希望为其添加一个方法来计算面积。
我们可以使用DeCo来实现这个功能。
```pythonclass Rectangle:def __init__(self, width, height):self.width = widthself.height = heightdef area(self):return self.width * self.height```现在,我们想要为这个矩形对象添加一个方法来计算周长。
我们可以使用装饰器来实现这个功能:```pythonfrom functools import wrapsdef decorator(func):@wraps(func)def wrapper(self):return func(self) + 2 * (self.width + self.height)return wrapperRectangle = decorator(Rectangle)```现在,我们可以使用新的`wrapper`方法来计算矩形的周长,而无需更改原来的`Rectangle`类的代码。
riscv断点指令

riscv断点指令
RISC-V架构中的断点指令用于在程序执行过程中设置断点,以便在特定条件下暂停程序的执行。
RISC-V架构定义了一些特定的断点指令,例如ebreak和csrrc指令。
1. ebreak指令,这是一条用于在RISC-V程序中设置断点的特殊指令。
当处理器执行到ebreak指令时,它会生成一个断点异常,暂停程序的执行。
在调试器或监视器中,可以利用这个异常来实现断点功能,例如在断点处停止程序执行并进入调试模式。
2. csrrc指令,RISC-V架构中的控制和状态寄存器(csrs)可以用于调试目的。
csrrc指令允许调试器在不影响程序状态的情况下设置断点。
通过修改控制和状态寄存器的值,可以在特定条件下触发断点异常,从而实现断点功能。
除了这些基本的断点指令外,RISC-V架构还允许扩展指令集来支持更复杂的调试功能。
例如,可以使用自定义指令或者调试扩展来实现条件断点、数据断点、硬件断点等高级调试功能。
总的来说,RISC-V架构中的断点指令提供了基本的调试功能,
可以通过这些指令在程序执行过程中设置断点,并在特定条件下暂停程序的执行,为调试工作提供了便利。
RAPID程序常用特殊指令及功能

RAPID程序常用特殊指令及功能RAPID(Robot Application Programming Interface Description)是ABB机器人系统中使用的一种编程语言,用于编写机器人的控制程序。
RAPID具有丰富的指令和功能,下面是一些常用的特殊指令及功能的概述。
1.数据类型和变量:RAPID支持多种数据类型,包括整数(int)、浮点数(num)、布尔值(bool)、字符串(string)等。
同时,可以使用变量来存储和处理数据。
在RAPID中可以通过VAR声明变量,并且可以使用LET给变量赋值。
2.运算符:3.条件语句:条件语句允许根据特定的条件来执行不同的操作。
RAPID中的条件语句包括IF语句和CASE语句。
IF语句用于判断一些条件是否成立,并根据条件的结果执行相应的代码块。
CASE语句用于对变量的多个可能值进行判断,并根据值的不同执行相应的代码块。
4.循环:循环语句允许重复执行相同的代码块。
RAPID中的循环语句包括FOR语句和WHILE语句。
FOR语句用于指定一个变量的初始值、终止条件和变化规律,并在每次循环中对变量进行更新。
WHILE语句用于在满足特定条件的情况下循环执行代码块。
5. 过程(Procedure)和模块(Module):过程是RAPID程序的基本执行单元,它是一段有序的代码块,可以通过PROC指令定义和调用。
模块是由一个或多个过程组成的代码块,它可以通过MODULE指令定义,并可以在其他程序中进行调用。
6.信号和事件处理:7.运动指令:RAPID提供了一系列用于控制机器人运动的指令,包括MOVJ、MOVL、MOVES等。
MOVJ指令用于指定关节坐标系下的直线或圆弧运动。
MOVL指令用于指定工具坐标系下的直线或圆弧运动。
MOVES指令用于指定机器人末端执行器坐标系下的直线或圆弧运动。
8.用户定义的功能模块:9.异常处理:RAPID提供了一些异常处理的指令,如TRY、CATCH和FINALLY。
800xa st语言tof指令用法

800xa st语言tof指令用法一、概述TOF指令是一种特殊指令,用于实现时间的测量和计算。
在800xA 智能交通系统中有广泛应用,可用于各种场景下的时间控制和时间差计算。
本篇文档将详细介绍TOF指令的用法和注意事项。
二、TOF指令介绍TOF指令用于获取当前时间与指定时间之间的差值,以毫秒为单位。
它有两种形式:TOF和TOF_REL。
TOF指令用于获取当前时间与指定时间之间的时间差,而TOF_REL指令则用于获取当前时间相对于上一次TOF指令执行所得到的时间差。
三、TOF指令用法1. 直接使用TOF指令TOF指令可以直接应用于系统中的事件处理器,用于实现定时控制和时间延迟。
例如,在某个信号灯的控制逻辑中,可以使用TOF指令来实现绿灯亮起后的延迟时间。
具体操作如下:(1)在事件处理器中编写逻辑代码,调用TOF指令;(2)当信号灯亮起时,执行TOF指令;(3)等待一段时间后,再次执行TOF指令;(4)根据两次TOF指令的时间差,调整信号灯的状态。
2. 使用TOF_REL指令TOF_REL指令可以用于实现实时控制和时间补偿。
例如,在视频监控系统中,可以使用TOF_REL指令来计算当前时间与上一次录像时间之间的时间差,从而判断是否需要立即录像或上传视频流。
具体操作如下:(1)在视频服务器中编写逻辑代码,调用TOF_REL指令;(2)每次执行TOF_REL指令时,记录当前时间作为上一次的时间;(3)当需要录像或上传视频流时,再次执行TOF_REL指令;(4)根据两次TOF_REL指令的时间差,决定是否立即执行录像或上传操作。
四、注意事项1. TOF指令的时间精度为毫秒级,适用于大多数应用场景;2. 在使用TOF指令时,需要注意系统的时钟精度和稳定性,以确保时间的准确性;3. TOF指令只能用于实时控制和时间补偿,不能用于精确的时间测量;4. 在使用TOF_REL指令时,需要注意上一次记录的时间是否准确,否则会影响时间的补偿效果;5. 在编写逻辑代码时,需要注意代码的可靠性和稳定性,以避免出现意外情况。
我的世界舞台技巧指令

我的世界舞台技巧指令
在《我的世界》中,舞台技巧指令是一种特殊的指令,它们可以用于创造各种视觉效果和特殊效果,从而增强舞台表演的吸引力。
以下是一些常用的舞台技巧指令。
1. /effect [玩家] [效果] [持续时间(秒)] [等级]:该指令可以给指定玩家施加一种效果,如速度、跳跃力、隐身等。
通过调整持续时间和等级,可以实现不同的效果。
2. /particle [粒子效果] [位置] [速度] [数量] [偏移量] [附加数据] [目标玩家]:该指令可以在指定位置生成粒子效果,如烟雾、火花、魔法粒子等。
通过调整参数,可以实现不同的粒子效果。
3. /summon [实体] [位置] [NBT数据]:该指令可以在指定位置生成指定类型的实体,如怪物、动物、NPC等。
通过调整参数,可以实现不同类型的舞台表演。
4. /teleport [玩家] [位置]:该指令可以将指定玩家传送到指定位置。
通过设置多个传送点,可以实现快速切换场景的效果。
5. /title [玩家] [标题] [副标题] [渐变时间] [停留时间] [淡出时间]:该指令可以在屏幕上显示标题和副标题。
通过调整参数,可以实现文字的出现、停留和消失的效果。
这些指令只是一些常用的例子,实际上《我的世界》的指令系统非常强大,可以通过各种指令和参数的组合,实现丰富多样的舞台效果。
希望这些指令能对您的舞台表演有所帮助。
risc-v unimp指令
risc-v unimp指令RISC-V中的Unimp指令(unimplemented instruction)是一种特殊的指令,其作用是在遇到不支持的指令时抛出异常。
当处理器执行某个指令时,如果该指令不是有效的指令,处理器会抛出一个异常。
这个异常可以被捕获并处理,以便向用户提供有用的信息。
通过使用Unimp指令,处理器可以更好地处理不受支持的指令。
在遇到不支持的指令时,处理器会跳转到异常处理程序,让系统知道问题所在。
这是一种非常有效的方法,因为它允许系统处理不受支持的指令,而不仅仅是忽略它们。
Unimp指令在RISC-V中非常重要,因为它们是在异常处理期间执行的。
当处理器遇到不支持的指令时,它将切换到异常状态,并进行上下文切换。
处理器会将所有必要的状态信息保存在异常堆栈中,并将控制权传递给异常处理程序。
Unimp指令的使用非常灵活。
它们可以用于各种不同的情况下,例如在处理器不支持的指令上,或在用户程序等级下,调用了特权级别的指令。
处理器还可以使用Unimp指令,以便在未来的处理器版本中添加新的指令。
如果新指令的实现需要更多的硬件支持,那么它可以作为Unimp指令的扩展宏指令。
当Unimp指令被执行时,它会生成一个异常,称为“不受支持的指令异常”。
处理器会将异常传递给异常处理程序,该程序负责处理该异常。
该处理程序应该决定如何处理该异常,并采取由该异常引起的适当措施。
在捕获异常之后,处理器会返回到下一个指令的执行点。
当处理器捕获不受支持的指令异常时,它会将异常代码保存在一个特殊的异常寄存器中。
这个异常代码提供了关于异常类型的更多信息,以便处理程序可以做出更具体的决策。
处理程序可以根据异常代码决定如何处理异常,并根据需要更改指令流。
Unimp指令是RISC-V架构中非常重要的一部分。
它们允许处理器处理不支持的指令,同时还提供了一种灵活的方式实现新指令。
Unimp指令的使用使得处理器异常处理更加高效,并提供了一种更好的通知用户关于问题的方法。
scl复位指令 -回复

scl复位指令-回复什么是SCL复位指令?在自动化控制系统的编程中,SCL复位指令是一种特殊的指令,用于将一个特定的标志位或者一组标志位重置为初始状态。
SCL代表"Set"、"Clear"、"Latch"的缩写,分别对应着设置、清零和锁存的意思。
这个指令的作用是根据需要,对任意标志位进行复位操作,从而实现对自动化控制系统的灵活控制和调整。
为了更好地理解SCL复位指令的使用方法和特点,接下来我们将分步骤进行详细说明。
第一步:确定需要复位的标志位或标志组在使用SCL复位指令之前,首先需要明确要对哪个标志位或标志组进行复位。
标志位通常是在程序中定义的一个变量,用来记录某个事件或条件是否满足的状态,比如一个按钮是否被按下,一个传感器是否检测到某个物体等等。
根据自己的需求,找到需要进行复位的标志位或标志组,并在程序中进行标识。
第二步:编写SCL复位指令一旦确定了需要复位的标志位或标志组,接下来就可以使用SCL复位指令进行编程了。
SCL复位指令通常由三个参数组成:地址、标志位和操作。
地址指的是要复位的标志位所在的内存地址,标志位则表示具体的一个或一组标志位的编号,操作则表示要进行的具体操作,包括设置、清零和锁存。
具体的编程语言和平台会略有不同,但是基本的格式大致相同。
以下是一个示例代码:SCL(地址, 标志位, 操作);例如,如果要将地址为100的标志位3进行清零操作,代码可以写为:SCL(100, 3, 清零);第三步:调用SCL复位指令完成SCL复位指令的编写后,接下来就可以通过调用这个指令,来实现对特定标志位或标志组的复位。
在程序中,可以根据需要选择适当的位置来调用SCL复位指令,通常是在某个条件满足时进行复位操作。
例如,如果需要在按下一个按钮后将标志位3进行复位操作,代码可以写为:IF(按钮状态为按下) THENSCL(100, 3, 清零);ENDIF这样,当按钮状态为按下时,SCL复位指令就会被调用,将地址为100的标志位3进行清零操作。
三菱plc特殊软元件 M指令
M8018检测RTC卡盒是否插入
M8019实时时钟(RTC)出错
D8010当前扫描时间
D8011最小扫描时间
D8012最大扫描时间
D8013秒
D8014分
D8015时
D8016日
D8017月
D8018年
D8019星期(0:星期日~6:星期六)
三标志
M8020零(加减运算结果为0时置位)
M8021借位
M8022进位
M8023小数点运算标志
M8024处于ON状态时执行指令、传送方向翻转
M8025HSC方式
M8026RAMP方式
M8027PR方式
M8028FROM./TO指令
执行中允许中断标志
M8029指令执行完成
D8028Z寄存器内容
D8029V寄存器内容
四PLC方式
M8030电池LED灯灭指令
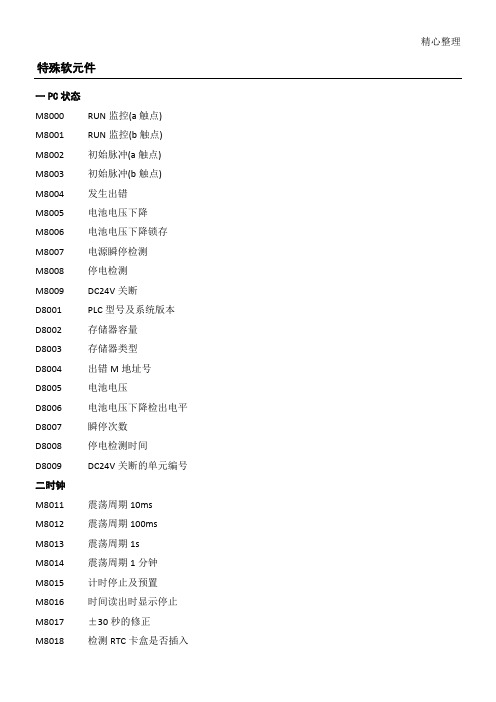
特殊软元件
一PC状态
M8000RUN监控(a触点)
M8001RUN监控(b触点)
M8002初始脉冲(a触点)
M8003初始脉冲(b触点)
MM8006电池电压下降锁存
M8007电源瞬停检测
M8008停电检测
M8009DC24V关断
D8001PLC型号及系统版本
D8002存储器容量
M8031全清非保持存储器
M8032全清保持存储器
M8033停止时存储器保持
M8034禁止所有输出
M8035强制RUN方式
M8036强制RUN信号
M8037强制STOP信号
M8038RAM文件寄存器全清零
M8039恒定扫描方式
D8039恒定
D8003存储器类型
台达 modrd 指令

台达 modrd 指令在工业自动化领域,PLC(可编程逻辑控制器)被广泛应用于各种自动化设备的控制和监控。
台达modrd指令是台达PLC中的一种特殊指令,用于读取和写入MODBUS设备的寄存器。
MODBUS是一种通信协议,常用于工业自动化中不同设备之间的通信。
使用台达modrd指令可以实现PLC与各种MODBUS设备之间的数据交换。
通过该指令,PLC可以读取MODBUS设备的状态和数据,并根据需要进行相应的控制操作。
这种数据交换可以实现设备之间的协调和互动,提高生产效率和质量。
台达modrd指令的应用范围非常广泛。
例如,在工业生产线上,PLC可以通过该指令读取各种传感器和执行器的数据,实时监测设备状态,及时发现问题并采取措施。
另外,PLC还可以通过该指令与其他设备进行通信,实现设备之间的数据交换和协同控制。
除了在工业生产中的应用,台达modrd指令还可以在能源管理、楼宇自动化等领域发挥作用。
通过与能源计量设备和智能控制设备的通信,PLC可以实现对能源消耗的监测和控制,帮助企业提高能源利用效率,降低能源成本。
在楼宇自动化中,PLC可以通过该指令与空调、照明等设备进行通信,实现楼宇设备的集中控制和管理。
然而,台达modrd指令的应用也面临一些挑战。
首先,不同厂家的MODBUS设备通信协议可能存在差异,需要进行适配和配置。
其次,大规模的数据交换可能对PLC的处理能力和通信带宽提出要求,需要进行合理的系统设计和优化。
此外,网络安全也是一个重要的考虑因素,需要采取相应的安全措施保护系统免受潜在的攻击。
台达modrd指令在工业自动化领域具有重要的应用价值。
它通过实现PLC与MODBUS设备之间的数据交换,实现了设备之间的协调和互动,提高了生产效率和质量。
随着工业自动化的发展,该指令的应用将更加广泛,为工业生产带来更大的便利和效益。
我们相信,通过不断的创新和优化,台达modrd指令将在工业自动化领域发挥更加重要的作用,推动工业生产的智能化和数字化进程。
汇编nop指令

汇编nop指令一、概述在计算机科学中,汇编语言是一种底层的编程语言,用于直接控制计算机硬件。
在汇编语言中,nop指令是一种特殊的指令,用于表示“无操作”。
本文将详细介绍nop指令的定义、作用、使用场景以及相关注意事项。
二、nop指令的定义nop指令(No Operation)是一种空操作指令,其作用是让处理器执行一个空操作,即不进行任何实际的计算或操作。
nop指令通常用于以下几种情况:1.填充空闲时间:在一些计算密集型任务中,为了使指令序列保持一定的节奏,可以在需要空闲时间的地方插入nop指令,以保持指令的流畅性。
2.调试和占位符:在调试程序时,可以在需要暂停或观察的地方插入nop指令,以便于观察程序的执行情况。
此外,nop指令还可以作为占位符,方便后续的指令插入和修改。
三、nop指令的使用nop指令通常由汇编语言提供的伪操作符或特殊指令来表示,具体表示方式可能因不同的汇编语言而有所区别。
下面以x86汇编语言为例,介绍nop指令的使用方法。
在x86汇编语言中,nop指令可以通过以下方式表示:1.使用nop伪操作符:在程序中使用nop伪操作符即可表示nop指令,例如:nop上述代码将会生成一条nop指令,让处理器执行一个空操作。
2.使用nop指令的操作码:每条指令在计算机中都有一个唯一的操作码,用于表示该指令的具体功能。
在x86汇编语言中,nop指令的操作码为0x90,可以直接使用该操作码来表示nop指令,例如:db 0x90上述代码使用了db伪操作符,将0x90作为一个字节的数据存储到指定的内存位置,从而实现了nop指令的效果。
使用nop指令时需要注意以下几点:•nop指令不会对寄存器、内存或标志位等状态产生任何影响,只是一个空操作。
•nop指令的执行时间很短,通常只占用一个CPU周期。
但是在一些特殊的处理器架构中,nop指令可能会占用多个CPU周期。
•在一些特殊的处理器架构中,nop指令可能会被优化或省略,因此在编写性能关键的代码时需要谨慎使用。
罗克韦尔nop指令

罗克韦尔nop指令在我人生中的某个特殊时刻,罗克韦尔nop指令成为了我生活中不可或缺的一部分。
那是一个充满回忆和情感的时刻,每当我回想起那段岁月,心中总是充满温暖和感慨。
从一开始,我就被罗克韦尔nop指令的神奇之处所吸引。
它是一种新型的计算机指令,通过一系列简洁而高效的操作,实现了人与计算机之间的无障碍沟通。
我还记得第一次接触到nop指令时的激动心情,仿佛揭开了通向未知世界的大门。
在我使用nop指令的过程中,我发现它不仅仅是一种工具,更是一种陪伴。
每当我面临问题时,nop指令总能给我帮助和指引。
它像一位贴心的朋友,默默地为我提供着支持和鼓励。
逐渐地,我与nop指令之间建立起了一种特殊的联系。
无论是在编程中还是在日常生活中,nop指令都成为了我不可或缺的助手。
它教会了我如何思考问题、解决困难,让我更加独立自主。
然而,nop指令也有着它的局限性。
在某些情况下,它并不能解决所有的问题。
但是,我从未放弃过对它的信任和依赖。
因为我相信,每一个技术都有它的局限性,重要的是我们怎样去发掘和利用它的优势。
回忆起那段岁月,我不禁感叹时间的流逝。
随着科技的发展,nop指令已经逐渐被淘汰,新的技术不断涌现。
但它在我心中留下的痕迹却是永远无法磨灭的。
或许,罗克韦尔nop指令只是我人生中的一段插曲,但它却给我带来了无尽的回忆和感动。
它让我明白了技术的力量,也让我体会到人与技术之间的关系。
正是这段与nop指令的缘分,让我更加坚定地走在了自己选择的道路上。
罗克韦尔nop指令,它不仅仅是一种计算机指令,更是一段我人生中难忘的回忆。
无论时光如何变迁,我将永远怀念那些与nop指令一起度过的美好时光。
fx3u dsub指令 -回复

fx3u dsub指令-回复FX3U DSUB指令是三菱电机PLC控制器中的一种特殊指令,用于在PLC 和外部设备之间进行数据的传输和通信。
本文将从介绍DSUB指令的概念、功能、使用步骤和示例应用等方面,详细解析这一指令的使用方法。
一、DSUB指令概念DSUB指令是三菱电机PLC控制器的一种特殊指令,它用于在PLC和外部设备之间进行数据传输和通信。
DSUB指令可以通过串行通信端口(RS232、RS485等)连接PLC和外部设备,实现数据的收发和控制信号的传递。
DSUB指令支持多种通信协议和通信方式,可以实现PLC与电脑、触摸屏、变频器等设备之间的通信。
二、DSUB指令功能DSUB指令的主要功能包括数据的读取、写入和控制信号的发送。
通过DSUB指令,PLC可以读取外部设备传来的数据,并根据这些数据进行相应的控制操作;同时,PLC也可以将数据写入到外部设备中,实现PLC与外部设备之间的数据交互。
此外,DSUB指令还支持发送控制信号,如启动、停止等,实现PLC对外部设备的远程控制。
三、DSUB指令使用步骤1. 配置通信端口:首先需要在PLC的参数设置中配置通信端口的相关参数,包括通信协议、通信速度等。
根据具体的外部设备要求进行设置,确保PLC与外部设备间的通信正常进行。
2. 编写通信程序:在PLC编程软件中,编写DSUB指令的通信程序。
通信程序一般包括初始化、数据读取、数据写入以及控制信号发送等模块。
在编写通信程序时,需要设置读取或写入的数据地址,通信协议等相关参数。
3. 配置外部设备:根据具体的外部设备要求,进行相应的配置。
包括设备的通信地址、通信协议等。
确保PLC和外部设备的通信参数匹配,数据传输的准确性和稳定性。
4. 编译PLC程序:在完成DSUB指令的编写后,需要将PLC程序进行编译,生成二进制的机器指令。
编译后的程序可以下载到PLC中运行,实现DSUB指令的功能。
四、DSUB指令示例应用下面以一个温度调节系统为例,介绍DSUB指令的具体应用。
mc指令里弯曲的括号

MC指令中的弯曲括号在Minecraft(以下简称MC)游戏中,指令是玩家与游戏世界进行交互的重要方式之一。
玩家可以通过输入指令来完成各种操作,如创造物品、传送到不同的位置、修改游戏规则等。
在MC指令中,有一种特殊的括号——弯曲的括号,它在指令中起到了非常重要的作用。
弯曲括号的基本语法在MC指令中,弯曲括号是用来表示选择项的。
它可以将多个选项放在一起,用竖线(|)分隔,表示这些选项中的任意一个都可以被选择。
例如,我们可以使用以下指令来传送到不同的位置:/tp @p (1 2 3|4 5 6|7 8 9)上述指令中,@p代表最近的玩家,括号内的三组坐标分别代表了三个不同的传送位置。
当执行该指令时,游戏会随机选择其中一个位置,并将玩家传送到该位置。
弯曲括号还可以嵌套使用,用于表示更复杂的选择结构。
例如,我们可以使用以下指令来随机生成不同类型的方块:/fill ~ ~ ~ ~10 ~10 ~10 (stone|dirt|wooden_planks|(wool (0|1|2|3)))上述指令中,fill指令用于生成方块,括号内的选项包括了石头、泥土、木板和羊毛。
而在羊毛选项中,又使用了一个嵌套的弯曲括号,用于表示不同颜色的羊毛。
弯曲括号的应用场景弯曲括号在MC指令中有着广泛的应用场景。
以下是一些常见的应用示例:1. 随机事件通过使用弯曲括号,我们可以实现随机事件的效果。
例如,我们可以使用以下指令来实现玩家随机获得不同的奖励:/give @p (diamond|gold_ingot|iron_ingot) 1上述指令中,玩家每次执行该指令时,都会随机获得钻石、金锭或铁锭中的一种,并获得一份。
2. 多选项选择有时候,我们需要玩家从多个选项中选择一个。
弯曲括号可以很好地实现这一效果。
例如,我们可以使用以下指令来让玩家选择不同的游戏模式:/gamemode @p (survival|creative|adventure)上述指令中,玩家可以从生存模式、创造模式和冒险模式中选择一个,并将自己的游戏模式设置为所选项。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
特殊指令
项目号指令語言助记符FUN编号页码
3-666
3-247
置进位 STC
040
041
清除进位 CLC
WDT 094 3-667 3-248 周期时间的监视时间设
定
3-669 3-249
状态标志保存 CCS 282
状态标志加载 CCL 283
3-250 CV→CS地址转换 FRMCV 284 3-671
3-251 CS→CV 地址转换 TOCV 285 3-675
3-665
特殊指令
3-666
3
各指令说明
特殊指令
置进位/清除进位STC (040) / CLC (041)
特殊指令
3-667 3
各指令说明
特殊指令
@WDT 周期时间的监视时间设定WDT(094)
特殊指令
3-668
3
各指令说明
特殊指令
周期时间的监视时间设定WDT (094)
特殊指令
3-669 3
各指令说明
特殊指令
状态标志保存CCS(282)/状态标志加载CCL(283)
特殊指令
3-670
3
各指令说明
特殊指令
状态标志保存CCS (282)/状态标志加载CCL (283)(094)
特殊指令
3-671 3
各指令说明
特殊指令
CV→CS 地址转换FRMCV(284)
特殊指令
3-672
3
各指令说明
特殊指令
CV →CS 地址转换FRMCV (284)
执行条件/立即刷新指定
ON 时每周期执行
FRMCV 上升沿1周期执行 @ FRMCV
执行条件
下降沿1周期执行 无 立即刷新指定
无
使用限制
区域
块 程序 区域 工程步 进程序 区域 子程序 区域
中断任务程序区域 使用 可以
可以
可以
可以
数据内容
区域
S
D CIO (输入输出继电器等) 0000~6143 — 内部辅助继电器 W000~511 — 保持继电器 H000~511 — 特殊辅助继电器 A448~959 — 时间 T0000~4095 — 计数器 C0000~4095 — 数据存储器 D00000~32767 — DM (BIN ) @D00000~32767 — DM (BCD ) *D00000~32767
—
常数 09FF Hex 、0A00~AFFHex 、0D00~0E3F Hex 以外
—
数据寄存器 DR0~15 变址寄存器(直接) IR0~15 变址寄存器(间接) IR0~15
-2048~+2047,IR~15 DR0~15,IRO~15 ,IR0~15+(++) ,-(- -) IR0~15
—
状态标志的动作
名称 标记 内容
出错标志
ER
·将CP 系列中不存在的下列通道编号的I/O 存储器有效地址指定在S 中时,为ON
暂时记忆继电器TR (09FF Hex ) -CPU 总线链接继电器G (0A00~AFF Hex )
-SFC 区域(0D00~0E3F Hex ) ()内为I/O 存储器有效地址
·除此之外为OFF
特殊指令
3-673 3
各指令说明
特殊指令
CV→CS 地址转换FRMCV(284)
动作说明
例1:在CVM1/CV 系列中将进行间接DM(*DM)的BIN 指定的程序置换成CP 系列用时
根据FRMCV 指令在S 中指定DM 区域,先将I/O 存储器有效地址保存在IR中,再进行IR的间接指定。
特殊指令
3-674
3
各指令说明
特殊指令
CV →CS 地址转换FRMCV (284)
例2:在CVM1/CV 系列中,将直接I/O 存储器有效地址保存到IR 的程序,置换到CP 系列用时
根据FRMCV 指令,在S 中直接指定CVM1/CV 系列的I/O 存储器有效地址。
CVM1/CV I/O
IR
0200Hex
CP
0.00
512 CH 512 CH
MOV
#0200
IR0
S D
I/O 200 Hex
512 CH
IR0
0.00
FRMCV
#0200
IR0
S D
CVM1/CV
I/O
0200 Hex 512 CH
CP
I/O 0000C200 Hex
IR0
0200 Hex I/O
000C200 Hex
#0200
IR0
I/O
0200 Hex
CP
CVM1/CV
CP CVM1/CV #000C200
IR
3
各指令说明
特殊指令
CS →CV 地址转换TOCV (285)
3
各指令说明
特殊指令CS→CV 地址转换TOCV(285)
执行条件/立即刷新指定
ON 时每周期执行 TOCV
上升沿1周期执行 @
TOCV
执行条件
下降沿1周期执行无
立即刷新指定无
使用限制
区域
块
程序
区域
工程步
进程序
区域
子程序
区域
中断任
务程序
区域
使用可以可以可以可以
数据内容
区域S D
CIO(输入输出继电器等)― 0000~6143
内部辅助继电器― W000~511
保持继电器― H000~511
特殊辅助继电器― A448~959
时间― T0000~4095
计数器― C0000~4095
数据存储器― D00000~32767
DM 间接(BIN)― @D00000~32767
DM 间接(BCD)― *D00000~32767
常数参见附注―
数据寄存器― DR0~15
变址寄存器(直接) IR0~15 ―
变址寄存器(间接)―,IR0~15
-2048~+2047,IR0~15
DR0~15,IR0~15
IR015+(++)
,-(- -) IR0~15
注:
z在由S指定的IR 内,如果保存CVM1/CV 系列中不存在
的下列通道编号的I/O 存储器有效地址,ER标志为ON。
()内为I/O 存储器有效地址。
TK 标志(0000B800~0000B801 Hex)
A512~959(0000BA40~0000BBFF Hex)
CIO2556~6143(0000C9FC~0000D7FFHex)
T1024~4095(0000BE40~0000BEFF Hex・
0000E400~0000EFFF Hex)
C1024~4095(0000BF40~0000BFFF Hex・
0000F400~0000FFFF Hex)
HR(0000D800~0000D9FF Hex)
WR(0000DE00~0000DFFF Hex)
D24576~32767(00016000~00017FFF Hex)
(BIN 数据)
z在S中 IR 以外的区域被指定时,ER标志为ON。
状态标志的动作
名称标记符内容
出错标志 ER z在S中指定CVM1/CV 系列中
不存在的通道编号的I/O 存储
器有效地址时,为ON
z除此之外为OFF
3
各
指令说明
特殊指令
CS →CV 地址转换TOCV (285)
3
各指令说明
特殊指令。