2007年国赛-电动车跷跷板(F题)【本科组】
大学生电子设计大赛参赛指导探讨

大学生电子设计大赛参赛指导探讨【摘要】大学生电子设计大赛是适合理工类大学生的一项重要赛事,成功参赛即可使学生获得更多的专业知识和实践技能,同时又能使学生获得省级或国家级奖项,对提高学生自身能力及就业非常有利,本文结合多年来指导学生参赛的经验提出了几点对成功参赛有帮助的观点供同行及学生探讨。
【关键词】电子设计大赛;成功参赛;参赛指导0 前言大学生电子设计大赛每年举行一次,分为省级赛、全国赛2种,省赛和全国赛交替进行(一年省赛一年国赛),省赛本省自己命题及评判获奖等级,全国赛为全国统一命题,在本省评判中获得优异成绩后推荐到国家级参评,最终有机会获得国家级奖项。
我院从2004年开始组织学生参加这个竞赛并取得了一些成绩,现把我的一些经验表述出来与同行及学生分享、探讨,为学生更好的参加竞赛提供参考。
1 合理选题1.1 依照专业特长选题历届大赛的题目分为电子信息、计算机、通信、自动控制、电子技术应用等方向,同学们要根据自己的专业特长、技能特长选题,我所在的机械电子工程系学生每年选择控制类的题目较多(如历年的电动窗帘、精密注水装置、智能小车、翘翘板等),这类题目特点是电子方面要求相对简单一些,但需要一些机械机构的知识,机电类学生利用自己的专业特长可以较轻松、实用的把装置搭接起来,为整个题目的顺利进行打下良好的基础,并赢得宝贵的竞赛时间(竞赛仅有4天时间)。
我院曾出现过善长电子方面的学生做控制类的题目,电子及单片机方面做得非常好,只是机构装置搭接得没有章法,最终在测试中受机构装置不稳定的影响最终没得到好成绩。
1.2 选题时要注意题目的可行性电子设计大竞从下题到交作品仅有4天时间,选题时不仅要看自己的知识能不能把作品完成,还要看在短时间内能不能把作品中所需的器件买到,买到后有没有时间研究,价格合不合理(毕竟预算有限),制作工艺能否达到要求等多方面的因素。
我们学生曾遇到过竞赛前器件准备不足,竞赛开始后急着在网上买件,其他内容都设计好了,只等器件到货装上调试,结果快递爆仓延误了2天,什么都耽误了。
大学生电子设计竞赛题目方向

大学生电子设计竞赛题目方向1)仪器仪表方向:音频信号分析仪:2021年a题数字取样示波器:2021年c题简易频谱分析仪:2021年c题简易逻辑分析仪:2021年d题低频相位测量仪:2021年c题数字存储示波器:2001年b题频率特性测量仪:1999年c题数字工频多用表:1999年b题简易数字频率计:1997年b题轻便rlc测量仪:1995年d题仪器仪表方向训练重点:内容:包含信号产生、采集、存储、分析、处理、显示、控制等信号处理环节中的大部分或全部。
类型:分成时域分析处置和频域分析处置两大类。
难点:强调速度、处理能力、显示性能等。
需要通过构建新技术硬件平台及运用信号处理算法来实现。
系统中的部分任务需要在训练阶段完成。
训练:dds任一信号产生、高速/宽带演示电路、滤波器、高速adc/dac取样与录像、高速数据存储(fifo)、算法(fft、卷积、有关、数字滤波等)、表明技术(lcd、绘图、实时曲线等)、弱实时性mammalian多任务软件设计、fpga/cpld与单片机的USB、仪器仪表原理、各类电参数测量、等内容。
2)电路系统方向:宽带直流放大器:2021年c题轻便程控滤波器:2021年d题正弦信号发生器:2021年a题宽带放大器:2021年b题压往下压l/c振荡器:2021年a题任一波形发生器:2001年a题轻便测量放大器:1999年a题录音与录像系统:1999年e题新颖信号源制作:1995年b题电路系统方向训练重点:内容:偏重概念和指标。
涉及到各类经典单元模块电路,及其基本概念、基本原理和新实现方法、性能指标测试方法等。
类型:分成功能型(轻在新方法)和指标型(轻在崭新设计思路)两大类。
难点:特别强调指标,通常经典设计、通用型ic就是难以完成的。
训练:(程控)放大器、(程控)滤波器、振荡器、dds任一信号产生、基本演示调理电路、电性能指标测试(电阻、增益、频宽…)、拓展设计思路等。
3)功率电子方向:光伏发电演示装置:2021年a题电能搜集充电器:2021年e题开关型稳压电源:2021年e题数控恒流源:2021年f题三相正弦变频电源:2021年g题高效d类放大器:2001年d题直流稳定电源:1997年a题实用音频放大器:1995年a 题功率电子方向训练重点:内容:小电流、大功率、三相电、斩波、dc-ac低电压、dc-dc开关电源、变频驱动、class-d功放、光伏发电、并网、mppt算法,等电力电子领域的新技术。
电动车跷跷板的设计
中 图 分 类 号 :4 3 U 8 文 献 标 识 码 —4 1 0 —4 6( 0 8 0 —0 0 0
De i n o e t i ke S c a- wn s g f El c rc Bi a r do
K N i , H N Y — e C N J n B e , HA G X ny A G J Z E uj , HE i , IL i Z N i— n i a i
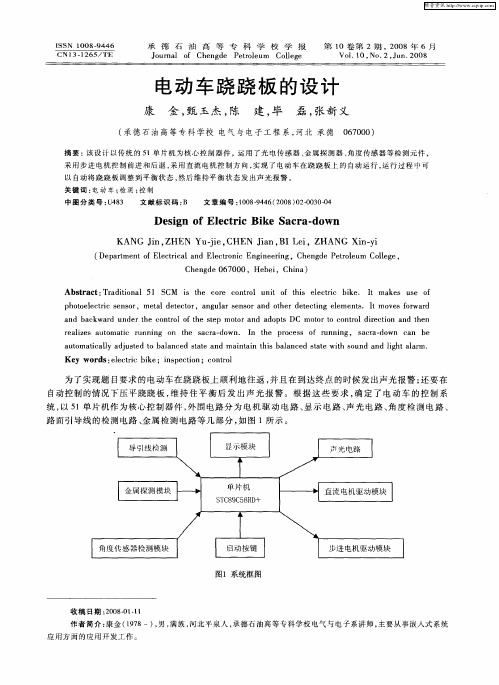
统, 5 以 1单片 机作 为核心 控制 器件 , 围电路 分为 电机 驱动 电路 、 外 显示 电路 、 光 电路 、 度检 测 电 路 、 声 角
路 面引 导线 的检测 电路 、 金属 检测 电路 等几部 分 , 图 1所示 。 如
图1系统框图
收 稿 日期 :0 80 一 1 2 0 —l 1
Vo .1 No 2,u 20 8 1 0, . J n. 0
电动 车 跷 跷 板 的 设 计
康 金 , 玉 杰 , 甄 陈 建 , 毕 磊 , 张新 义
( 德 石油 高等专 科学校 电气 与 电子 工程 系 , 北 承 德 承 河 070 ) 6 0 0
摘 要 : 设 计 以 传 统 的 5 单 片 机 为 核 心控 制器 件 ,运 用 了 光 电 传感 器 、 属 探 测 器 、 度 传 感 器 等 检 测 元 件 , 该 1 金 角
作 者 简 介 : 金 ( 98一) 男 , 族 , 北平 泉人 , 德 石 油 高 等 专 科 学 校 电气 与 电子 系讲 师 , 要 从 事 嵌 入 式 系统 康 17 , 满 河 承 主
大学生电子设计竞赛题目方向

大学生电子设计竞赛题目方向1)仪器仪表方向:音频信号分析仪:2007年A题数字取样示波器:2007年C题简易频谱分析仪:2005年C题简易逻辑分析仪:2003年D题低频相位测量仪:2003年C题数字存储示波器:2001年B题频率特性测量仪:1999年C题数字工频多用表:1999年B题简易数字频率计:1997年B题简易RLC测量仪:1995年D 题仪器仪表方向训练重点:内容:包含信号产生、采集、存储、分析、处理、显示、控制等信号处理环节中的大部分或全部。
类型:分为时域分析处理和频域分析处理两大类。
难点:强调速度、处理能力、显示性能等。
需要通过构建新技术硬件平台及运用信号处理算法来实现。
系统中的部分任务需要在训练阶段完成。
训练:DDS 任意信号产生、高速/宽带模拟电路、滤波器、高速ADC/DAC采样与回放、高速数据存储、算法、显示技术、强实时性并发多任务软件设计、FPGA/ CPLD 与单片机的接口、仪器仪表原理、各类电参数测量、等内容。
2)电路系统方向:宽带直流放大器:2009年C题简易程控滤波器:2007年D题正弦信号发生器:2005年A题宽带放大器:2003年B题压控L/C振荡器:2003年A题任意波形发生器:2001年A题简易测量放大器:1999年A题录音与回放系统:1999年E题实用信号源制作:1995年B题电路系统方向训练重点:内容:偏重概念和指标。
涉及到各类经典单元模块电路,及其基本概念、基本原理和新实现方法、性能指标测试方法等。
类型:分为功能型和指标型两大类。
难点:特别强调指标,通常经典设计、通用IC是难以完成的。
训练:放大器、滤波器、振荡器、DDS任意信号产生、基本模拟调理电路、电性能指标测试、开拓设计思路等。
3)功率电子方向:光伏发电模拟装置:2009年A题电能收集充电器:2009年E题开关型稳压电源:2007年E题数控恒流源:2005年F题三相正弦变频电源:2005年G题高效 D 类放大器:2001年D题直流稳定电源:1997年A题实用音频放大器:1995年A题功率电子方向训练重点:内容:大电流、大功率、三相电、斩波、DC-AC逆变、DC-DC开关电源、变频驱动、Class-D功放、光伏发电、并网、MPPT算法,等电力电子领域的新技术。
基于AT89S52单片机的电动车跷跷板系统设计

基于AT89S52单片机的电动车跷跷板系统设计作者:张建化陈跃熊永超来源:《现代电子技术》2008年第24期摘要:介绍电动车跷跷板系统的设计与实现。
该系统包括单片机系统电路、寻迹检测电路、平衡检测电路、步进电机驱动电路、数码显示电路等。
在系统中,以AT89S52单片机为电动小车控制核心,使用反射式红外发射接收器来检测轨迹,步进电机作为动力源实现小车前进后退和转向控制,用2个水银开关控制完成平衡状态的检测,用数码管分阶段实时显示电动车行驶所用时间。
3次实验数据表明,这里所提出的平衡检测方案是有效可行的。
关键词:寻迹检测电路;步进电机;跷跷板系统;平衡检测电路中图分类号:TP271.4文献标识码:B文章编号:1004-373X(2008)24-163-03Design of Seesaw System with Electric Vehicle Based on AT89S52 Single Chip ComputerZHANG Jianhua,CHEN Yue,XIONG Yongchao(Xuzhou Institute of Technology,Xuzhou,221008,China)Abstract:Design and implementation of seesaw system based on electric vehicle are introduced.The control system consists of AT89S52 single chip computer system,autonomous tracing circuit,balance detection circuit,driving circuit of stepping motor and LED display circuit.Centering on AT89S52,the track detection is realized by reflective infrared emitter and receiver and the steering of the vehicle is driven by stepping motor.The detection of balance state is implemented by two mercury switches and the travel time is displayed with LED separately.The scheme is proved to be effective and practical by experimental results during three tests.Keywords:autonomous tracing circuit;stepping motor;seesaw;balance detection circuit1 引言2007年全国大学生电子设计大赛的F题目是“电动车跷跷板”[1];题目要求设计并制作一个电动车跷跷板,使得电动小车从图1所示跷跷板起始端A出发在30 s内到达中心点C并保持平衡5 s,之后在30 s内到达跷跷板末端B并停留5 s,最后在1 min内退回到起始端A。
全国大学生电子设计竞赛试题

全国大学生电子设计竞赛试题题目1 多路数据采集系统一、设计任务主控器能对50米以外的各路数据,通过串行传输线(实验中用1米线代替)进行采集和显示。
具体设计任务是:①现场模拟信号产生器。
②八路数据采集器。
③主控器。
二、设计要求1.基本要求①现场模拟信号产生器自制一正弦波信号发生器,利用可变电阻改变振荡频率,使频率在200Hz至2kHz范围变化,再经频率电压娈换电路后输出相应1V至5V直流电压(200Hz对应1V,2kHz对应5V)②八路数据采集器数据采集器第一路输入自制1V至5V直流电压,第2至7路分别输入来自直流源的5,4,3,2,1,0V直流电压(各路输入可由分压器产生,不要求精度),第八路备用。
将各路模拟信号分别转换成八位二进制数字信号,再经并/串变换电路,用串行码送入传输线路。
③主控器主控器通过串行传输线路对各路数据进行采集和显示。
采集方式包括循环采集(即1路、2路、…、8路、1路…)和选择采集(任选一路)二种方式。
显示部分能同时显示地址和相应的数据。
2.发挥部分①利用电路补偿或其它方法提高可变电阻值变化与输出直流电压变化的线性关系;②尽可能减少传输线数目;③其它功能的改进(例如:增加传输距离,改善显示功能等)题目2 简易无线电遥控系统一、任务设计并制作无线电遥控发射机和接收机2.无线电接收机电路如图二、要求1.基本要求①工作频率:6至10MHz中任选取一种频率。
②调制方式:AM、FM或FSK任选一种。
③输出功率:不大于20MW(在标准75Ω假负载上)。
④遥控对象:8个,被控设备用LED分别代替,LED发光表示工作。
⑤接收机距离发射机不小于10m。
2.发挥部分① 8路设备中的一路设备为电灯,用指令遥控电灯亮度,亮度分为8级,并用数码管显示级数。
②在一定发射功率下,(不大于20MW),尽量增大接收距离。
③增加信道的抗干扰措施。
④尽量降低电源功耗。
注:不能采用现成的收、发信号整机。
题目3 数字化语音存储与回放系统二、任务设计并制作一个数字化语音存储与回放系统,电路的示意图如图所。
全国大学生电子设计竞赛介绍_很有用

二、历届竞赛试题与获奖情况
1、2007年试题及获奖情况 2007年试题及获奖情况
1)试题(本科题A-F),高职题(G-J) )试题(本科题A F),高职题(G A题、音频信号分析仪(主要属于模拟类) B题、无线识别装置(RFID,射频无线电类) 题、无线识别装置(RFID,射频无线电类) C题、数字示波器(数字电路类) D题、程控滤波器(数模结合类) E题、开关稳压电源(电源类) 题、开关稳压电源(电源类) F题、电动车跷跷板(控制类) 题、电动车跷跷板(控制类) G题、积分式直流数字电压表(数字类) 题、积分式直流数字电压表(数字类) H题、信号发生器(模拟类) 题、信号发生器( I题、可控放大器 (模数结合) J题、电动车跷跷板 (控制类) 2 )获奖情况
6、评奖
全国大学生电子设计竞赛分为“赛区奖” 全国大学生电子设计竞赛分为“赛区奖”和“全国奖”两种形式。 全国奖” 1)、各赛区竞赛组委会负责本赛区的评奖工作,赛区奖的评奖等级及各 1)、各赛区竞赛组委会负责本赛区的评奖工作,赛区奖的评奖等级及各 奖项获奖比例由各赛区根据实际情况自行确定。为鼓励学生广泛参与 这一活动,建议各赛区设置“成功参赛奖” 这一活动,建议各赛区设置“成功参赛奖”或类似意义的奖项,凡按 时完成竞赛内容、达到基本要求的参赛队均可发给“成功参赛证书” 时完成竞赛内容、达到基本要求的参赛队均可发给“成功参赛证书” 或类似奖项证书。 2)、赛区评审结束后,各赛区竞赛组委会将本赛区竞赛优秀参赛队的设 2)、赛区评审结束后,各赛区竞赛组委会将本赛区竞赛优秀参赛队的设 计报告及有关材料报送全国竞赛组委会(报送的具体内容及报送时间 另行通知),报送全国竞赛组委会评奖的优秀参赛队数分别不超过本 赛区本科生组和高职高专学生组实际参赛队总数的10%。全国竞赛组 赛区本科生组和高职高专学生组实际参赛队总数的10%。全国竞赛组 委会根据全国专家组的评审结果确定全国一、二等奖,获奖总数原则 上不超过全国实际参赛队总数的8%。对于同一题目,同一所学校获得 上不超过全国实际参赛队总数的8%。对于同一题目,同一所学校获得 全国一、二等奖的队数分别不超过3 全国一、二等奖的队数分别不超过3个。 3)、本科生组和高职高专学生组分别评奖,各设索尼杯。 3)、本科生组和高职高专学生组分别评奖,各设索尼杯。 4)、全国大学生电子设计竞赛设立“赛区优秀组织奖”, 对竞赛组织中 4)、全国大学生电子设计竞赛设立“赛区优秀组织奖” 表现出色的赛区竞赛组委会给予表彰奖励;同时设立“优秀征题奖” 表现出色的赛区竞赛组委会给予表彰奖励;同时设立“优秀征题奖”, 对竞赛征题工作中表现突出的个人给予表彰奖励。
2007年J题 电动车跷跷板_全国大学生竞赛山东赛区组委会.doc
电动车跷跷板海军航空工程学院(青岛) 邵慧李文超孙庆洲摘要本设计为使电动车在跷跷板上按要求准确运行采用了单片机AT89C51最小系统作为电动车的检测和控制系统。
通过红外发射接收一体探头检测路面黑色寻迹线,使小车按预定轨道行驶,根据角度传感器检测跷跷板的平衡状态控制电动车使其在跷跷板上达到动态平衡。
再加上基于AT89C51单片机的键盘、液晶显示电路,构成了整个系统的硬件总电路。
最后通过软件设计,实现了按预定轨道行驶、保持平衡等功能。
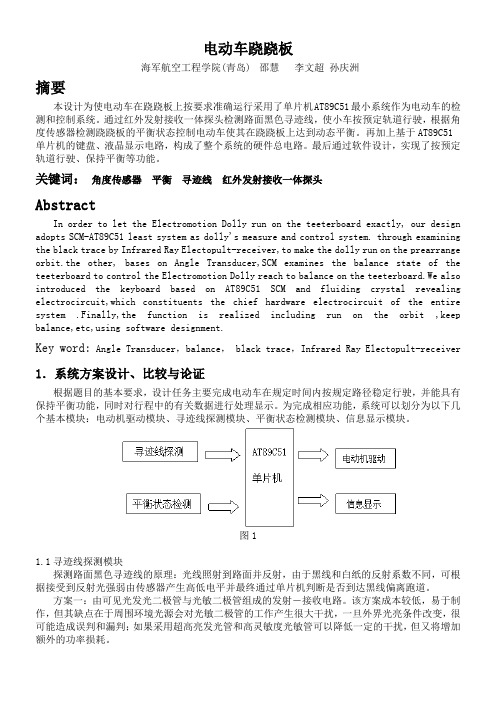
关键词:角度传感器平衡寻迹线红外发射接收一体探头AbstractIn order to let the Electromotion Dolly run on the teeterboard exactly, our design adopts SCM-AT89C51 least system as dolly's measure and control system. through examining the black trace by Infrared Ray Electopult-receiver,to make the dolly run on the prearrange orbit.the other, bases on Angle Transducer,SCM examines the balance state of the teeterboard to control the Electromotion Dolly reach to balance on the teeterboard.We also introduced the keyboard based on AT89C51 SCM and fluiding crystal revealing electrocircuit,which constituents the chief hardware electrocircuit of the entire system .Finally,the function is realized including run on the orbit ,keep balance,etc,using software designment.Key word: Angle Transducer,balance, black trace,Infrared Ray Electopult-receiver 1.系统方案设计、比较与论证根据题目的基本要求,设计任务主要完成电动车在规定时间内按规定路径稳定行驶,并能具有保持平衡功能,同时对行程中的有关数据进行处理显示。
2007年题目--F--电动车跷跷板
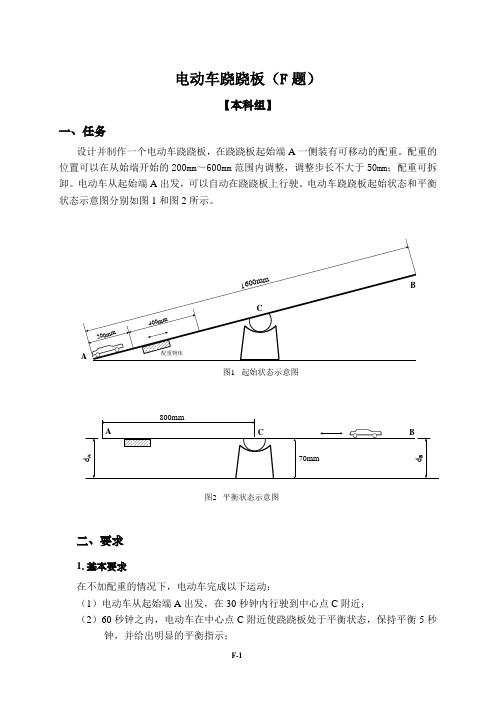
电动车跷跷板(F题)【本科组】一、任务设计并制作一个电动车跷跷板,在跷跷板起始端A一侧装有可移动的配重。
配重的位置可以在从始端开始的200mm~600mm范围内调整,调整步长不大于50mm;配重可拆卸。
电动车从起始端A出发,可以自动在跷跷板上行驶。
电动车跷跷板起始状态和平衡状态示意图分别如图1和图2所示。
图1 起始状态示意图图2 平衡状态示意图二、要求1.基本要求在不加配重的情况下,电动车完成以下运动:(1)电动车从起始端A出发,在30秒钟内行驶到中心点C附近;(2)60秒钟之内,电动车在中心点C附近使跷跷板处于平衡状态,保持平衡5秒钟,并给出明显的平衡指示;(3)电动车从(2)中的平衡点出发,30秒钟内行驶到跷跷板末端B 处(车头距跷跷板末端B 不大于50mm );(4)电动车在B 点停止5秒后,1分钟内倒退回起始端A ,完成整个行程; (5)在整个行驶过程中,电动车始终在跷跷板上,并分阶段实时显示电动车行驶所用的时间。
2.发挥部分将配重固定在可调整范围内任一指定位置,电动车完成以下运动:(1)将电动车放置在地面距离跷跷板起始端A 点 300mm 以外、90°扇形区域内某一指定位置(车头朝向跷跷板),电动车能够自动驶上跷跷板,如图3所示:(2)电动车在跷跷板上取得平衡,给出明显的平衡指示,保持平衡5秒钟以上; (3)将另一块质量为电动车质量10%~20%的块状配重放置在A 至C 间指定的位置,电动车能够重新取得平衡,给出明显的平衡指示,保持平衡5秒钟以上; (4)电动车在3分钟之内完成(1)~(3)全过程。
(5)其他。
三、说明(1)跷跷板长1600mm 、宽300mm ,为便于携带也可将跷跷板制成折叠形式。
(2)跷跷板中心固定在直径不大于50mm 的半圆轴上,轴两端支撑在支架上,并保证与支架圆滑接触,能灵活转动。
(3)测试中,使用参赛队自制的跷跷板装置。
(4)允许在跷跷板和地面上采取引导措施,但不得影响跷跷板面和地面平整。
电赛主攻(控制类)

主攻“控制类”赛题方向的同学注意了:1.历届的“控制类赛题”在9届电子设计竞赛中,“控制类赛题”除了1994和1995年外,其它每届都有,共有9题:①水温控制系统(1997年C题);②自动往返电动小汽车(2001年C题);③简易智能电动车(2003年E题);④液体点滴速度监控装置(2003年F题);⑤悬挂运动控制系统(2005年E题);⑥电动车跷跷板(2007年F题本科组);⑦电动车跷跷板(2007年J题高职高专组);⑧声音引导系统(2009年B题);⑨模拟路灯控制系统(2009年I题)。
其中与电动小车有关的有6题。
2. 从历届赛题可以看到:从历届的赛题来看,主攻“控制类”赛题方向的同学需要了解和掌握:(1)系统控制方案和算法设计(2)微控制器电路模块制作和编程:如:AT89S52、MSP430F1611、MSP430F2274、Atmega128、PIC16F628A、ADuC841、C8051F022、W78E51B、STM32F103VET6等等。
(3)微控制器外围电路模块制作和编程:如键盘及LED数码管显示器模块、RS-485总线通信模块、CAN总线通信模块、无线收发器电路模块、ADC模块、DAC模块等等。
(4)传感器电路模块制作和编程:如光电传感器模块、超声波发射与接收模块、温湿度传感器模块、倾角传感器模块、角度传感器模块、音频信号检测模块等等。
(5)电机控制电路模块制作和编程:如直流电机驱动模块(L298 N)、步进电机驱动模块(L297+L298N,TA8435H)、舵机控制模块、光电隔离模块等等。
(6)放大器电路模块制作:小信号放大器电路模块、滤波器电路模块、音频放大器(7)电源电路模块制作(8)电动小车制作3. 建议:“控制类”赛题中所涉及到的一些知识点,特别是有关自动控制理论与算法方面,对有些专业的同学来讲,在专业课程中是没有的,需要自己去搞清楚。
这一点很重要。
理论用来指导行动。
2007年复赛详解最新修正版

最新修正版上海市第二十一届初中物理竞赛(大同中学杯)复赛试题(2007年)解析说明:1.本试卷共有五大题,答题时间为120分钟,试题满分为150分2.答案及解答过程均写在答卷纸上。
其中第一~第二大题只要写出答案,不写解答过程;第三~第五大题按题型要求写出完整的解答过程。
解答过程中可以使用计算器。
3.考试完毕只交答卷纸,试卷可以带回。
4.本试卷中常数g取10N/kg,水的比热容4.2×103J/kg,水的密度1.0×103kg/rn3。
一、选择题(以下每题只有一个选项符合题意,每小题4分,共32分)1.统计结果显示一般身材的人的高矮与脚印(面积)大小具有一定的关系。
下列关于刑侦人员为估计涉案人员的高矮和体重的做法中,正确的是:( )(A)只要获得脚印的大小就可以估计涉案人员的体重(B)只要获得在松软地面上脚印的深浅就可以估计涉案人员的高矮(C)只要获得在松软地面上脚印的大小和深浅就可以估计涉案人员的高矮和体重(D)由于人的身材千差万别。
刑侦人员根据脚印的大小和深浅无法估计涉案人员的身高或体重。
解:根据P=F/ S 可知,在压强相同时,压力与受力面积成正比.题中已知罪犯的脚印的大小可求出其脚印面积的大小,再利用在松软地面上脚印的深浅,就可以算出罪犯对地面的压力,然后即可估计涉案人员的高矮和体重.故选C.2.在炒花生、葵花子或栗子时,锅中总要入放些沙子。
这样做主要是为了( )(A)使炒锅的温度升高(B)让沙子吸收一些水分,使炒货更脆(C)使炒货均匀受热且不直接与锅底接触(D)让沙子吸收一部分热。
防止因温度过高而使炒货变焦解:在炒花生、葵花子或栗子时,由于锅底的温度较高,很容把炒货炒糊,如果锅中总要入放些沙子,这样沙子被炒热后可以均匀的把热量传递给炒货,这样炒出的炒货效果较好;故选C.3.有一种说法叫做“水缸‘穿裙子’天就要下雨”。
水缸“穿裙子”是指,在盛水的水缸外表面,齐着水面所在位置往下,出现了一层均匀分布的小水珠。
全国大学生电子设计竞赛09年

• 河南赛区组委会 成立于1999年第四届, 当时参加10多所高校,50多个参赛队, 到2009年第九届时,共有343个参赛队, 43所高校。 • 省内评出62个一等奖,57名二等奖,70 名三等奖,占总参赛队的55%,一等奖 中又有23名报送全国获奖,全国一等奖 7人,二等奖16人。
• 河南省成绩较为突出的是解放军信息工 程大学和中原工学院和铁路职业技术学 院。中原工学院具有得天独厚的条件, 信大确实实力非凡,铁路职业技术学院 异军突起。
• 10.上报全国评审的比例 • 赛区和全国对参赛规模进行统计时,一律以实 际参赛队数量为准。实际参赛队是指已经正式 报名并按时向赛区组委会上交参赛作品(含制 作实物和设计报告)的参赛队。在赛区评审、 评奖的基础上,赛区组委会应按时向全国组委 会推荐本赛区的优秀代表队参加全国评审,推 荐的队数分别不得超过当年本赛区本科生组和 高职高专学生组实际参赛队数量的10%,逾期 未上报的不予受理。
• 7.竞赛时间和竞赛周期 • 全国大学生电子设计竞赛每逢单数年的9月份 举办,赛期四天(具体日期届时通知)。在双 数的非竞赛年份,根据实际需要由全国竞赛组 委会和有关赛区组织开展全国的专题性竞赛, 同时积极鼓励各赛区和学校根据自身条件适时 组织开展赛区和学校一级的大学生电子设计竞 赛。
• 8.竞赛题目 • 竞赛题目是保证竞赛工作顺利开展的关键,应由全国专家组制定 命题原则,赛前发至各赛区。全国竞赛命题应在广泛开展赛区征 题的基础上由全国竞赛命题专家统一进行命题。全国竞赛命题专 家组以责任专家为主体,并与部分全国专家组专家和高职高专学 校专家组合而成。 • 全国竞赛采用两套题目,即本科生组题目和高职高专学生组题目, 参赛的本科生只能选本科生组题目;高职高专学生原则上选择高 职高专学生组题目,但也可选择本科生组题目,并按本科生组题 目的标准进行评审。只要参赛队中有本科生,该队只能选择本科 生组题目,并按本科生组题目的标准进行评审。凡不符合上述选 题规定的作品均视为无效,赛区不予以评审。
电子设计大赛控制类题目汇总+赛题分析.doc

电子设计大赛控制类题目汇总+赛题分析电子设计大赛控制类题目汇总第三届(1997年)C题水温控制系统一、任务设计并制作一个水温自动控制系统,控制对象为1升净水,容器为搪瓷器皿。
水温可以在一定范围内由人工设定,并能在环境温度降低时实现自动控制,以保持设定的温度基本不变。
二、要求1.基本要求(1)温度设定范围为40~90℃,最小区分度为1℃,标定温度≤1℃。
(2)环境温度降低时(例如用电风扇降温)温度控制的静态误差≤1℃。
(3)用十进制数码管显示水的实际温度。
2.发挥部分(1)采用适当的控制方法,当设定温度突变(由40℃提高到60℃)时,减小系统的调节时间和超调量。
(2)温度控制的静态误差≤0.2℃。
(3)在设定温度发生突变(由40℃提高到60℃)时,自动打印水温随时间变化的曲线。
三、评分意见项目得分基本要求设计与总结报告:方案设计与论证,理论分析与计算,电路图,测试方法与数据,对测试结果的分析50实际制作完成情况50发挥部分减小调节时间和超调量)C题自动往返电动小汽车一、任务设计并制作一个能自动往返于起跑线与终点线间的小汽车。
允许用玩具汽车改装,但不能用人工遥控(包括有线和无线遥控)。
跑道宽度0.5m,表面贴有白纸,两侧有挡板,挡板与地面垂直,其高度不低于)简易智能电动车(E题)一、任务设计并制作一个简易智能电动车,其行驶路线示意图如下:二、要求1、基本要求(1)电动车从起跑线出发(车体不得超过起跑线),沿引导线到达B点。
在“直道区”铺设的白纸下沿引导线埋有1~3块宽度为15cm、长度不等的薄铁片。
电动车检测到薄铁片时需立即发出声光指示信息,并实时存储、显示在“直道区”检测到的薄铁片数目。
(2)电动车到达B点以后进入“弯道区”,沿圆弧引导线到达C点(也可脱离圆弧引导线到达C点)。
C点下埋有边长为15cm的正方形薄铁片,要求电动车到达C 点检测到薄铁片后在C点处停车5秒,停车期间发出断续的声光信息。
(3)电动车在光源的引导下,通过障碍区进入停车区并到达车库。
07年电赛资料

2007年全国大学生电子设计竞赛试题参赛注意事项(1)2007年9月3日8:00竞赛正式开始。
本科组参赛队只能A、B、C、D、E、F题目中任选一题;高职高专组参赛队原则上在G、H、I、J题中任选一题,也可以选择其他题目。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生身份的有效证件(如学生证)随时备查。
(4)每队严格限制3人,开赛后不得中途更换队员。
(5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设计制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取消评审资格。
(6)2007年9月6日20:00竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。
音频信号分析仪(A题)【本科组】一、任务设计、制作一个可分析音频信号频率成分,并可测量正弦信号失真度的仪器。
二、要求1.基本要求(1)输入阻抗:50Ω(2)输入信号电压范围(峰-峰值):100mV~5V(3)输入信号包含的频率成分范围:200Hz~10kHz(4)频率分辨力:100Hz(可正确测量被测信号中,频差不小于100Hz的频率分量的功率值。
)(5)检测输入信号的总功率和各频率分量的频率和功率,检测出的各频率分量的功率之和不小于总功率值的95%;各频率分量功率测量的相对误差的绝对值小于10%,总功率测量的相对误差的绝对值小于5%。
(6)分析时间:5秒。
应以5秒周期刷新分析数据,信号各频率分量应按功率大小依次存储并可回放显示,同时实时显示信号总功率和至少前两个频率分量的频率值和功率值,并设暂停键保持显示的数据。
2.发挥部分(1)扩大输入信号动态范围,提高灵敏度。
(2)输入信号包含的频率成分范围:20Hz~10kHz。
(3)增加频率分辨力20Hz档。
(4)判断输入信号的周期性,并测量其周期。
电子设计大赛_需要什么准备吗
几点要求:1.完美的焊接工艺;2.各种仪器的熟练使用;3.各种常用元器件的识别(种类、材质、参数等等);4.产用芯片的使用方法和引脚定义(常用运放、比较器、数字电路、AD\DA、电源芯片等等);5.单片机的使用,说起单片机。
你说你现在在学习郭天祥的教程,那个教程是很实用的。
他那个是做好的成品板子,电路已经固定了,也很适合教学。
但对于你来说,你的思路一定要广,不要受他的思维限制。
现在阶段你先跟着教程学学,作为教学内容已经很好了。
教程嘛,都是单元电路的介绍和使用。
到了后期,要根据学习和掌握情况,你要自己设计出一个系统,把键盘、显示、AD\DA这些常用的东西在一个系统里都用上。
后期,根据老师的建议看需要选择什么单片机。
6.我觉得应该是细节了,焊接工艺可靠程度、电路的布局、PCB的走线、测试点的安置、电路的安装等等,这些都有可能直接给你判死刑。
在学校测得好好的,拿去测试点的路上由于颠簸,电路那里出了问题,到时候你要是做不到如火纯情,直接就手忙脚乱,一个头两个大,直接就挂了。
大概是我第一次参加全国竞赛的时候吧,有个兄弟的电路刚一通电,之间芯片冒了一股青烟随后,随后一直硕大无比的电解电容直接爆炸,直接被测试老师撵出去了。
大概是加电源的时候极性搞反了。
Dare to creat & enjoy!祝你在2011年的第十届全国大学生电子设计竞赛中展示你的风采、获得好成绩。
课程有:《电工电路基础》《低频电子线路》《数字电路》《高频电子线路》《电子测量》《智能仪器原理及应用》《传感器技术》《电机与电气控制》《信号与系统》《单片机接口原理及应用》等等。
所要学习的科目当然不能定局,知识面越广越好,它是对各个科目综合运用的产物,而且要具有非常强的动手和创新能力,对一个人的动手能力有很大的促进作用.学起来不要急于求成,掌握一些基本电路及调试,焊接技术,Protel软件的使用,能制作机器人最好对机械结构方面也要懂些。
很多东西只要学习了不一定什么时候就能用到,不要在学时表面感觉没用就不注重它,那样就犯了很大的错误了。
国家公务员行测判断推理(类比推理)模拟试卷34(题后含答案及解析)

国家公务员行测判断推理(类比推理)模拟试卷34(题后含答案及解析)全部题型 3. 判断推理判断推理类比推理先给出一组或多组相关的词,要求你在备选答案中找出一组与之在逻辑关系上最为贴近或相似的词。
1.亦步亦趋:主见A.兴高采烈:恐惧B.鼠目寸光:眼力C.优柔寡断:果断D.孤陋寡闻:胆识正确答案:C解析:亦步亦趋是因为缺少应有的主见,优柔寡断是因为缺少应有的果断。
2.创新:僵化A.开放:闭塞B.发展:前进C.计划:秩序D.革新:失败正确答案:A解析:创新和僵化属于反义词关系,A项开放和闭塞也属于反义词关系。
3.坚若磐石对于( )相当于( )对于良心A.懦弱:金石为开B.意志:知恩图报C.信心;落井下石D.品质:铁石心肠正确答案:B解析:坚若磐石形容有意志;知恩图报形容有良心。
4.铁匠:火炉:镰刀A.医学家:试管:药剂B.记者:摄像机:新闻稿C.科学家:科技文献:新产品D.网民:互联网:营销正确答案:A解析:铁匠用火炉制作镰刀,医学家用试管制作药剂。
5.( )对于建筑相当于计划对于( )A.设计成果B.图纸工作C.材料战略D.施工目标正确答案:A解析:先有设计后有建筑,先有计划后有成果。
且设计是一种计划,建筑是一种成果,两者相对应。
6.琴棋书画:经史子集A.兵强马壮:闭关自守B.鸟兽虫鱼:江河湖海C.衣帽鞋袜:冰清玉洁D.悲欢离合:漂泊流浪正确答案:B解析:琴棋书画和经史子集的每个字之间是并列关系,鸟兽虫鱼和江河湖海的每个字之间也是并列关系。
故答案选B。
7.法律:约束A.新闻:广播B.政策:规范C.历史:借鉴D.制度:学问正确答案:B解析:法律具有约束作用,政策具有规范作用。
且约束和规范的对象都是人,C项借鉴的对象是历史。
8.( )对于知识相当于分析对于( )A.书本理论B.学习结论C.学问研究D.学生研究员正确答案:B解析:通过学习获取知识,通过分析得出结论。
C项学问和知识可看作近义词,但分析和研究并不是近义词,分析只是研究的一个方面。
全国青少年机器人技术等级考试一级第二课02跷跷板课件

课后训练
6.机器人的英文单词是什么? A.Botre B.Borte C.Robot D.Rebot
课后训练
7.筷子和镊子是省力杠杆。 ()
8.把轴轮看做杠杆,则半径一定是动力臂。
(x)
跷跷板实操模型
机架稳定性
以孔砖与板块 搭建基础地基
可以尽量多使 用些孔砖板块 使搭建越稳固
机构运动性
课后训练
4.在你学过的简单机械中,正常使用时,既可以省 力又可能费力的机械是?
A.杠杆 B.动滑轮 C.定滑轮 D.滑轮组
课后训练
5.关于力臂,下列说法正确的是? A.支点到动力作用点的距离叫做动力臂。 B.支点到阻力作用点的距离叫做阻力臂。 C.支点到力的作用线的垂直距离叫做力臂。 D.杠杆的力臂一定在杠杆之上。
机构运动以轴为 中心,配以连接 直孔臂,轴套限 位,完成运动性
运动中心切记一定是轴
外观相似性
跷跷板坐板 以孔砖板块 搭建,用直 角弯臂连接
外观相似性尽量 要做到相似,有 时间可以在装饰 一下
总结
杠杆定义
1:杠杆动力臂 支点
阻力、阻力臂
省力杠杆
3:杠杆分类
费力杠杆
1.使用下列简单机械,为了省力的是? A.龙舟比赛用的船桨. B.开瓶用的开瓶器. C.理发师用的剪刀. D.旗杆顶的定滑轮.
课后训练
2.下列生活物品中,属于费力杠杆的是? A.开瓶器 B.筷子 C.镊子 D.核桃钳
课后训练
3.下列说法中不正确的是? A.利用机械既可以减轻体力劳动,又可以提高工作 效率。 B.杠杆是一种简单的机械,杆的形状可以是直的, 也可以是弯曲的。 C.滑轮是属于杠杆变形的一种简单机械。 D.以上说法均不正确。
电动车跷跷板自平衡系统设计_夏鲲
第24卷 第2期 电子测量与仪器学报 Vol. 24 No. 2 2010年2月JOURNAL OF ELECTRONIC MEASUREMENT AND INSTRUMENT· 179 ·本文于2009年6月收到。
*基金项目: 上海理工大学博士启动基金项目。
DOI: 10.3724/SP.J.1187.2010.00179电动车跷跷板自平衡系统设计*夏 鲲 张振国 丁 学 陈建强(上海理工大学光电信息与计算机工程学院电气系, 上海 200093)摘 要: 采用32位ARM 芯片LPC2138作为MCU, 由AccuStar 电子倾角传感器获得的角度信号经移动平均滤波法作数字滤波构成检测信号, 用步进电动机作为控制驱动装置, 形成增量式闭环数字PID 控制系统,使电动小车能自动完成在不同条件下于跷跷板上保持平衡的控制任务.实验结果表明, 该系统在板长为1.6 s 时, 初次平衡响应时间小于65 s, 二次平衡响应时间小于60 s, 平衡位置与水平位置偏差小于1.1°。
关键词: AccuStar 电子倾角传感器; 数字PID; 移动平均滤波法; 步进电动机 中图分类号: TP272 文献标识码: A 国家标准学科分类代码: 470.4017Design for the electric car and teeterboardself-balanced systemXia Kun Zhang Zhenguo Ding Xueming Chen Jianqiang(University of Shanghai for Science and Technology, Shanghai, 200093)Abstract: The 32-bit ARM chip LPC2138 was applied as the MCU and the stepper motor was used as the driven device. The angle signals derived from the AccuStar electronic inclinometer by using moving average digital filter helped to accomplish the closed loop digital PID control system and keep the balance of the teeterboard under different conditions. The experiment results show that when the length of the teeterboard is 1.6 meter, the first balance costs less than 65 seconds, the second balance costs less than 60 seconds and the deviation between the balance point and the horizontal position is less than 1.1 degree.Keywords: AccuStar electronic inclinometer; digital PID; moving average digital filter; stepper motor1 引 言移动机器人的姿态控制技术在诸如航空、航海等许多领域有着广泛的应用, 各种类型的数字倾角传感器应运而生[1-2]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2007年全国大学生电子设计竞赛
电动车跷跷板(F题)【本科组】
一、任务
设计并制作一个电动车跷跷板,在跷跷板起始端A一侧装有可移动的配重。
配重的位置可以在从始端开始的200mm~600mm范围内调整,调整步长不大于50mm;配重可拆卸。
电动车从起始端A出发,可以自动在跷跷板上行驶。
电动车跷跷板起始状态和平衡状态示意图分别如图1和图2所示。
二、要求
图1 起始状态示意图
图2 平衡状态示意图
1.基本要求
在不加配重的情况下,电动车完成以下运动:
(1)电动车从起始端A出发,在30秒钟内行驶到中心点C附近;
(2)60秒钟之内,电动车在中心点C附近使跷跷板处于平衡状态,保持平衡5秒钟,并给出明显的平衡指示;
(3)电动车从(2)中的平衡点出发,30秒钟内行驶到跷跷板末端B处(车头距跷跷板末端B不大于50mm);
(4)电动车在B点停止5秒后,1分钟内倒退回起始端A,完成整个行程;
(5)在整个行驶过程中,电动车始终在跷跷板上,并分阶段实时显示电动车行驶所用的时间。
2.发挥部分
将配重固定在可调整范围内任一指定位置,电动车完成以下运动:
(1)将电动车放置在地面距离跷跷板起始端A 点 300mm 以外、90°扇形区域内某一指定位置(车头朝向跷跷板),电动车能够自动驶上跷跷板,如图3所示:
(2)电动车在跷跷板上取得平衡,给出明显的平衡指示,保持平衡5秒钟以上;
(3)将另一块质量为电动车质量10%~20%的块状配重放置在A 至C 间指定的位置,电动车能够重新取得平衡,给出明显的平衡指示,保持平衡5秒钟以上; (4)电动车在3分钟之内完成(1)~(3)全过程。
(5)其他。
三、说明
(1)跷跷板长1600mm 、宽300mm ,为便于携带也可将跷跷板制成折叠形式。
(2)跷跷板中心固定在直径不大于50mm 的半圆轴上,轴两端支撑在支架上,并保证与支架圆滑接触,能灵活转动。
(3)测试中,使用参赛队自制的跷跷板装置。
(4)允许在跷跷板和地面上采取引导措施,但不得影响跷跷板面和地面平整。
(5)电动车(含加在车体上的其它装置)外形尺寸规定为:长≤300mm ,宽≤200mm 。
(6)平衡的定义为A 、B 两端与地面的距离差d=∣dA-dB ∣不大于40mm 。
(7)整个行程约为1600mm 减去车长。
(8)测试过程中不允许人为控制电动车运动。
(9)基本要求(2)不能完成时,可以跳过,但不能得分;发挥部分(1)不能完成时,可以直接从(2)项开始,但是(1)项不得分。
四、评分标准
图3 自动驶上跷跷板示意图。