第11章 轮系习题答案
机械原理轮系习题参考答案

一、解:(1)判断方向,蜗杆左旋用左手右旋用右手,四指握向蜗杆转动方向,拇指指向的反方向即为涡轮转向。
由此逆向判断图中蜗杆、涡轮和齿轮旋转方向如图中箭头所示。
手柄转向如图所示。
4001
601836186056341265432116=××=••=••=z z z z z z w w w w w w i 二、解:该轮系为周转轮系,由反转法对整个轮系加一个反向旋转角速度H w −,
由于齿轮4为定齿轮,角速度为零,即04=w ,所以H H i i 14
11−=; 又有 2.2)1(3423123
14−=•••−=z z z z z z i H
所以 2.32.211=+=H i
三、解:此轮系中假设轮1的方向向下,则行星轮2、2'和太阳轮4的转向都是
向下。
行星轮2、2'和行星架的角速度相同 在左边行星轮系中,1
3
1H 130z z H H −=−−=ωωωω 在右边行星轮系中,'2
444'2z z H ==ωωωω ∴4114ωω=i ==+4'2131z z z z z 25416
四、解:该轮系可以分为两部分,如图中虚线所分的左右两部分,左边为周转轮系,右边为定轴轮系;
分别求出两个轮系的传动比如下:
周转轮系:=H i 1414
1556601441===++z z n n n n H H ; 定轴轮系:7
63530566556====z z n n i ; 两轮系的关系是:
45n n =; 联立方程组求得min 9.741r n ≈; 转向与齿轮6转向相反。
第11章-轮系习题答案

一、填空题:1.轮系可以分为:定轴轮系和 周转轮系 。
2.定轴轮系是指:当轮系运动时,各轮轴线位置固定不动的轮系;周转轮系是指:轮系运动时,凡至少有一个齿轮的轴线是绕另一齿轮的轴线转动的轮系。
3.周转轮系的组成部分包括: 太阳轮 、 行星轮 和 行星架 。
4.行星轮系具有 1个自由度,差动轮系有 2自由度。
5、行星轮系的同心条件是指:要使行星轮系能正常运转,其基本构件的回转线必须在同一直线上。
6、确定行星轮系中各轮齿数的条件包括:传动比条件、同心条件、均布条件、邻接条件。
7、正号机构和负号机构分别是指:转化轮系的传动比H 1n i 为正号或者负号的周转轮系。
动力传动中多采用 负号 机构。
二、分析计算题 1、在图示的车床变速箱中,移动三联齿轮a 使3’和4’啮合。
双移动双联齿轮b 使齿轮5’和6’啮合。
已知各轮的齿数为z 1=42,582=z ,38'3=z ,42'4=z ,48'5=z ,48'6=z 电动机的转速为n 1=1445r/min ,求带轮转速的大小和方向。
解:3858483842484258'5'31'6'426116-=⨯⨯⨯⨯=-==z z z z z z n n i min /9466r n -=(与电动机转动方向相反)2、在图示的轮系中,已知各轮齿数为20z z z z z 65321=====, 已知齿轮1、4、5、7为同轴线,试求该轮系的传动比17i 。
(1)z z z z z 41231225520100=++==⨯=z z z z 75612332060=+==⨯=(2)iz z z z zz z z z z17323467123561=-()=-⨯⨯=-100602020153、在图示轮系中,已知:蜗杆为单头且右旋,转速n11440= r/min,转动方向如图示,其余各轮齿数为:402=z,20'2=z,303=z,18'3=z,544=z,试:(1)说明轮系属于何种类型;(2)计算齿轮4得转速n4;(3)在图中标出齿轮4的转动方向。
机械原理与机械零件活页练习11解答

一、单选题 11-1 所谓定轴轮系,是指轮系中 。 A.各齿轮的轴都是固定不动的 B.各齿轮的轴线都是固定不动的 C.各齿轮都是固定不动的 D.至少一个齿轮的轴线是固定不动的
练习十一 轮系
11-2 所谓周转轮系,是指轮系中 。 A.各齿轮的轴线均相对某一固定轴线作运动 B.各齿轮的轴线均绕着某一固定轴线作回转运动 C.至少有一个齿轮的轴线相对其他齿轮的固定轴 线作运动 D.至少有一个齿轮的轴线绕着其他齿轮的固定轴 线作回转运动
练习十一 轮系
2)按要求填表
序号
变速传动路线
Ⅱ轴转速nⅡ的计算过程
Ⅱ轴转向
(用图中的符号表示) (直接代入输入转速和齿数) (填箭头)
1档 (快进)
Ⅰ—A—B—Ⅱ
nⅡ=nⅠ=1872r/min
↑
2档 (中进)
Ⅰ—1—2—3—4—Ⅱ
nⅡ= 1872 19 31 1116r / min 38 26
H与3同向
z1 =20, z2 =24 z2‘ = 30,z3 = 40 n1 =200r/min n3 =100r/min
练习十一 轮系
3)求图b所示轮系的nH。
i1H3
n1 nH n3 nH
z2z3 z1z2
200 nH 24 40 8 100 nH 20 30 5 nH 66.67r / min
练习十一 轮系
3)依据轮系传动比通式,
求出传动比i14和n4。 4)哪个齿轮是惰轮?其作用
是什么?
i14
n1 n4
z2 z3z4 z1 z2 z3
60 45 135 30 30 45
9
机械原理课后答案第十一章作业

11-5 图a 、 b所示为两个不同结构的圆锥齿轮周转轮系,已知z1=20, z2=24,z2′=30,z3=40,n1=200r/min,n3= -100r/min。求两轮系 nH= ?(下面给出了计算结果,请检查所列算式、计算结果、 转向的判断是否正确,若正确请打“√”。)
2)图b: n1 n H H =i13 = n3 nH
√
z2 z3 = - 1.6 z 1 z 2
nH = (i13 H n3- n1) / (i13 H - 1)
= [- 1.6×(-100) -200] / (- 1.6 - 1) = 15.385 r/min
√
根据上述计算结果,请回答下列问题
n 1 n H - z2 z4 z6 z7 = z1 z3 z5 z6 n7 nH
39 39 152 == - 44.44 17 17 18
n7 = 0, n1=1450r/min
nH = 31.91 (r/min) (H的转向与 1的转向相同)
11-11 图示的复合轮系,已知n1=3549r/min,各轮齿数为 z1=36,z2=6 z3 =23, z4= 49, z 4′= 69, z5=31,z6=131,z7=94,z8=36, z9=167,试求行星架H的转速nH(大小及转向)。 解:1)分清轮系 定轴轮系:1—2—3—4 行星轮系:4 ′—5—6(7) 行星轮系:7—8—9(H) 2)分别列出各轮系的传动比计算式 i14= n1 /n4 =z2z4 /z1z3 =3.551(转向如图) z 6 = -1.899 7 = n 4 n 7 = - z 5 i 4 6 0 n 7 3)写出联接关系式 z 4 z 5 n4= n4′ z 8 z 9 = -1.777 H = n7 nH = i 79 0 n H - z z 4)联立求解 7 8 nH = 124.15(r/min) ( H的转向与轮4相同)
机械原理答案第十一章 齿轮系及其设计

第十一章 齿轮系及其设计题11-1如图所示为一手摇提升装置,其中各轮齿数均已知,试求传动比i 15,并指出当提升重物时手柄的转向(在图中用箭头标出)。
解: 此轮系为空间定轴轮系78.5771811520524030504321543215=⨯⨯⨯⨯⨯⨯=='''z z z z z z z z i题11-2如图所示为一滚齿机工作台传动机构,工作台与涡轮5固联。
若已知z 1=z 1′=15,z 2=35,z 4′=1(右旋),z 5=40,滚刀z 6=1(左旋),z 7=28。
今要切制一个齿数z 5′=64的齿轮,应如何选配挂轮组的齿数z 2′、z 3和z 4。
解:由范成原理,滚刀6与轮坯5’的角速度比应为64655656==='''z z i ωω 转向如图。
这一角速度比由滚齿机工作台的传动系统来保证。
56242442175421155011528403515''''''=⨯=⨯⨯⨯⨯⨯==i z z z z z z z z z z z z i 转向如图可求得253252=z z 至于Z 3为惰轮,其齿数可根据中心距A 24的需要确定。
题11-3 如图所示为一千分表的示意图。
己知各轮齿数如图,模数mm m 11.0=(为非标准模数)。
若要测量杆1每移动mm 001.0时,指针尖端刚好移动一个刻度()mm s 5.1=。
问指针的长度?=R (图中齿轮5和游丝的作用是使各工作齿轮始终保持单侧接触,以消除齿轮间隙对测量精度的影响) 解:()4332-'-组成定轴轮系1001160120121632431224=⨯⨯===''z z z z i ϕϕ24100ϕϕ=∴再由轮2与测量杆组成齿轮与齿条传动知 测杆1每移动mm 001.0时,齿轮2的转角为:42221027.611.029001.022-⨯=⨯⨯===m Z h r h ϕ 此时要求指针刚好移动一刻度()mm s 5.1=,由4ϕR s =可得指针的长度为mm s sR 241027.61005.1100424=⨯⨯===-ϕϕ题11-4 如图所示为绕线机的计数器。
机械设计第十一章课后习题答案
总是指向其转动中心;圆向力 的方向与其运动方向相反。
图 11.3 题11-8解图 11-9解 ( 1)要使中间轴上两齿轮的轴向力方向相反,则低速级 斜齿轮3的螺旋经方向应与齿轮2的 旋向同为左旋,斜齿轮4的旋向应与齿轮3的旋向相反,为右旋。
( 2)由题图可知:
、、
、
、
分度圆直径
,
查教材表 11-4
,并将许用应用降低30%
故
( 2)其弯曲强度设计公式:
其中:小齿轮转矩
载荷系数 查教材表11-3得
取齿宽系数
齿数
,取
齿数比
齿形系数 查教材图 11-9得
、
因
故将
代入设计公式
因此 取模数
中心距
齿宽 11-5解 硬齿面闭式齿轮传动的主要失效形式是折断,设计方法是 按弯曲强度设计,并验算其齿面接触 强度。 ( 1)许用弯曲应力 查教材表 11-1,大小齿轮材料40Cr 表面淬火硬度:52~ 56HRC,取54HRC。查教材图11-10得
11-1 解 1)由公式可知:
轮齿的工作应力不变,则
则,若
,该齿轮传动能传递的功率
11-2解 由公式
可知,由抗疲劳点蚀允许的最大扭矩有关系: 设提高后的转矩和许用应力分别为 、
当转速不变时,转矩和功率可提高 69%。
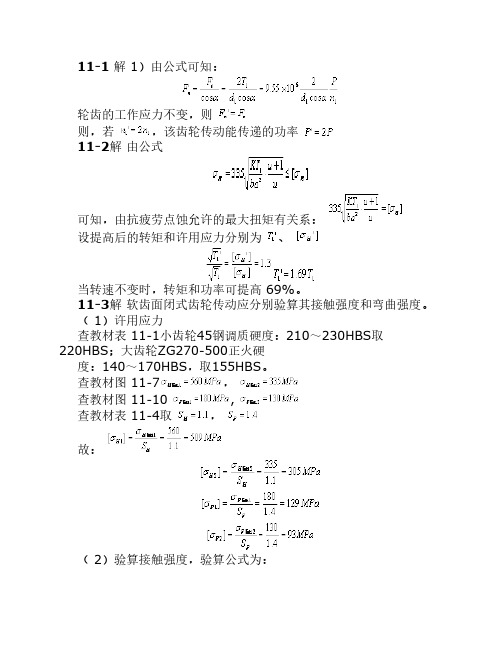
11-3解 软齿面闭式齿轮传动应分别验算其接触强度和弯曲强度。
( 1)许用应力
查教材表 11-1小齿轮45钢调质硬度:210~230HBS取
,查材料图11-7得
。查教材表11-4
, 因齿轮传动是双向工作,弯曲应力为对称循环,应将极限值乘
70%。
故 ( 2)按弯曲强度设计,设计公式:
轮系习题答案
n1 转向为正,则
50 nH 0 nH
30 80 20 50
nH 14.7r / min 与 n1 转向相同,方向的判定如图所示。
8-5 如图为标准圆柱直齿轮传动系统,已知 Z1=60 , Z2=20, Z2‘=25 ,各轮模数相等,求:
1) Z3;
2)若已知 n3=200r/min, n 1=50r/min, n3,n1转向如图,求系杆 H转速大小和方向;
解: i ⅠⅡ= i 4H
在周转轮系中:
n1 nH
Z3
n3 nH
Z1
n1' n H n3 ' n H
Z3
3
Z1
在定轴轮系中:
n1' Z 4 n 4 Z 1'
3
n1'
n4 4
n3'
Z4
n3'
3 n4
n4
Z 3'
4
i4H i
n4 nH
8 3
8-10 已知 Z1=12, Z2=51 , Z3=76 , Z4=49, Z5=12 ,Z6=73,求此混合轮系传动比
3)当 n1 方向相反时,以 -50r/min 代入,则
50 nH 200 nH
20 15 60 25
nH 8.33r / min
nH 8.33r / min 转向与 n1 一致
8-6 图示轮系中,已知各轮齿数为 Z 1=60 , Z2=20 , Z2‘=20 , Z3=20 , Z4=20 , Z5=100,试求
题 8-1 图
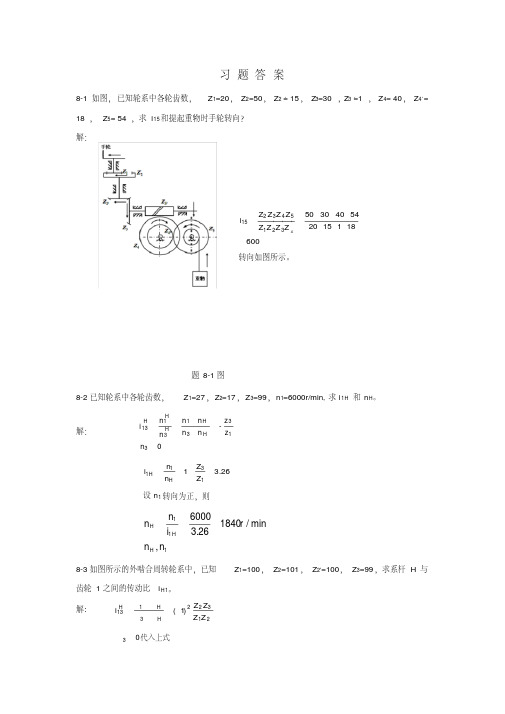
8-2 已知轮系中各轮齿数, Z1=27 , Z2=17 , Z3=99, n1=6000r/min, 求 i 1H 和 nH。
第11章 轮系习题答案

5’-6-6’-7(8)组成差动轮系
(2)
(3)
关联: (4)
联立解以上方程得到
也就是说,当齿轮7转动一圈时,齿轮8要反方向专动22.27圈,二者的方向相反。
解:1、2为定轴轮系
方向。
2'、3、3'、4、B为周转轮系。
, 。
转向同 。
10、在图示的复合轮系中,设已知n1=3549r/min,又各轮齿数为z1=36,z2=60,z3=23,z4=49,z4’=69,z6=131,z7=94,z8=36,z9=167,试求行星架H的转速 (大小及转向)?
解:转向用画箭头的方法表示
一、填空题:
1.轮系可以分为:定轴轮系和周转轮系。
2.定轴轮系是指:当轮系运动时,各轮轴线位置固定不动的轮系;
周转轮系是指:轮系运动时,凡至少有一个齿轮的轴线是绕另一齿轮的轴线转动的轮系。
3.周转轮系的组成部分包括:太阳轮、行星轮和行星架 。
4.行星轮系具有1个自由度,差动轮系有2自由度。
5、行星轮系的同心条件是指:要使行星轮系能正常运转,其基本构件的回转线必须在同一直线上。
(1)说明轮系属于何种类型;
(2)计算齿轮4得转速 ;
(3)在图中标出齿轮4的
(3) 方向←。
4、如图所示为一手摇提升装置,其中各轮齿数均已知,试求传动比 ,并指出当提升重物时手柄的转向(从左往右看时的转向)
解:方向判断用画箭头的方法完成,从左往右看时的转向为逆时针方向。
6、在图示自动化照明灯具的传动装置中,已知输入轴的转速n1=19.5r/min,各齿轮的齿数为z1=60,z2=z3=30,z4=z5=40,z6=120,求箱体B的转速nB。
轮系习题及答案(改)
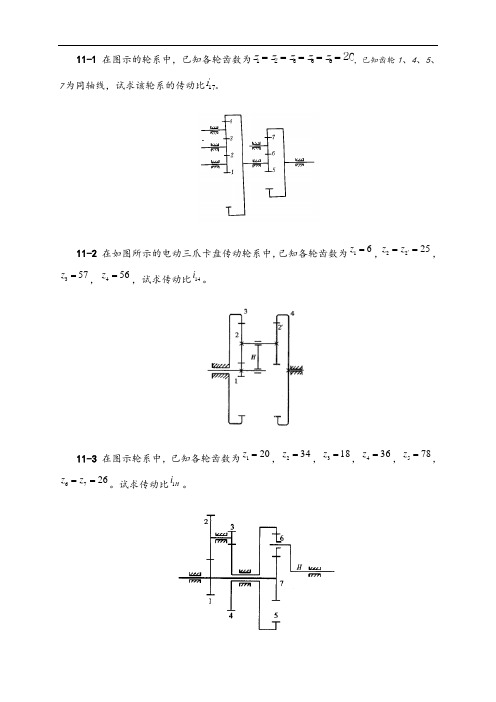
11-1 在图示的轮系中,已知各轮齿数为z z z z z 1235620=====,已知齿轮1、4、5、7为同轴线,试求该轮系的传动比i 17。
11-2 在如图所示的电动三爪卡盘传动轮系中,已知各轮齿数为16z =,2225z z '==,357z =,456z =,试求传动比14i 。
11-3 在图示轮系中,已知各轮齿数为120z =,234z =,318z =,436z =,578z =,6726z z ==。
试求传动比1H i 。
11-6 在图示的轮系中,已知各轮齿数为122z =,388z =,46z z =,试求传动比16i 。
11-8 求图示卷扬机减速器的传动比1H i 。
若各轮的齿数为124z =,248z =,230z '=,360z =,320z '=,440z =,4100z '=。
11-10 在图示的轮系中,已知各轮齿数:11z =,240z =,224z '=,372z =,318z '=,4114z =,蜗杆左旋,转向如图示。
求轮系的传动比1H i ,并确定输出杆H 的转向。
11-11 在图示轮系中,各轮模数相同,均为标准齿轮,各轮齿数如下,z z 123050==,,z z z z 4678100303050====,,,,z z 10550120==,。
试求轴Ⅰ、Ⅱ之间的传动比I,IIi 。
第十一章 轮系习题答案11-1(1)z z z z z 41231225520100=++==⨯=z z z z 75612332060=+==⨯=(2)i z z z z z z z z z z 17323467123561=-()=-⨯⨯=-1006020201511-2(1)三爪卡盘传动轮系是一个行星轮系,它可以看作由两个简单的行星轮系组成。
第一个行星轮系由齿轮1、2、3和行星架H 所组成;第二个行星轮系由齿轮3、2、2'、4和行星架H 组成。
机械原理补充习题(轮系答案)
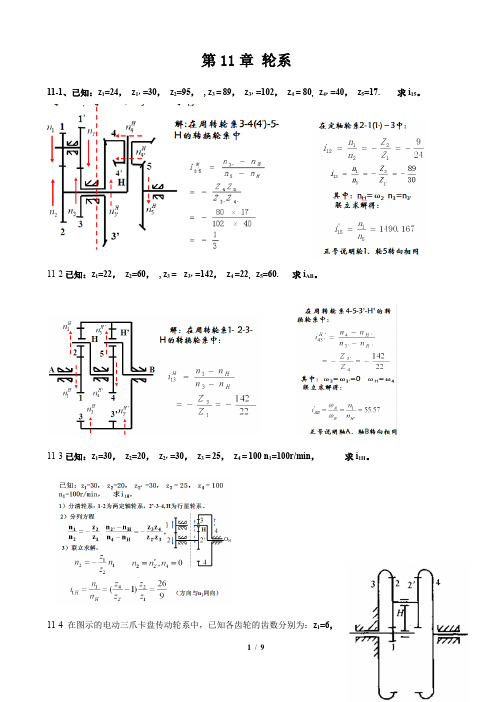
第11章轮系11-1、已知:z1=24,z1’=30,z2=95,, z3 =89,z3’=102,z4 = 80,z4’=40,z5=17.求i15。
11-2已知:z1=22,z2=60,, z3 =z3’=142,z4 =22,z5=60.求i AB。
11-3已知:z1=30,z2=20,z2’=30,z3 =25,z4 =100 n1=100r/min,求i1H。
11-4 在图示的电动三爪卡盘传动轮系中,已知各齿轮的齿数分别为:z1=6,z2=z2’=25,z3 =57,z4 =56,求传动比i1411-5 图示轮系,已经各齿轮齿数为:z1=24,z1’=34,z2=40,z2’=40,z3 =18,z3’=38,z4 =36,z4’=22,求该轮系传动比i AH,11-6 图示轮系,已经各齿轮齿数为:z1=22,z3 =z5,求该轮系传动比i1511-7 .图 示 轮 系 中, 已 知z z z z 134420====',z 280=,z 560=。
若n A =1000 r/min, 求n B 的 大小 及 方 向。
(1) n z z n 212120801000250=-=-⨯=-r/min n n 23= (2) i n n n n n z z z z H H H H 3533453401206020203=--=-=-=-⨯⨯=-'(3)n n H34=11-8 .图 示 轮 系 中, 已 知 各轮 齿 数, 试 求 轮 系 的 传 动 比 i AB 。
( 写 成 齿 数 比 的 形 式〕(1)(2)11-9 .在 图 示 轮 系 中, 已 知 各 轮 的 齿 数z z 1380==',z z 3520==, 及 齿 轮1 的 转 速n 170= r/min, 方 向 如 图 示。
试 求 齿 轮5 的 转 速n 5 的 大 小 及 方 向。
(1) 1、2、3 为 定 轴 轮 系。
第11章习题及其答案

mnmn 第十一章的课后答案11-1 在计算行星轮系的传动比时,式i= 1- i H 只有在什么情况下才是正确的?mHmn答:在行星轮系,设固定轮为 n ,即ξ = 0 时, i= 1- i H 公式才是正确的。
nmHmn11-2 在计算周转轮系的传动比时,式i mH = (n m - n H )/ (n n - n H ) 中的i mH 是什么传动比,如何确定其大小和“ ± ”号?答:i mH 是在根据相对运动原理,设给原周转轮系加上一个公共角速度“ -ξH ”,使之绕 行星架的固定轴线回转,这时各构件之间的相对运动仍将保持不变。
而行星架的角速度为 0, 即行星架“静止不动”,于是周转轮系转化成了定轴轮系,这个转化轮系的传动比。
其大小可以用i mH = (n m - n H ) / (n n - n H ) 公式计算;方向由“ ± ”号确定,但注意,它由在转化轮系中m ,n两轮的转向关系来确定。
11-3 用转化轮系法计算行星轮系效率的理论基础是什么?为什么说当行星轮系为高速时,用它来计算行星轮系的效率会带来较大的误差?答:用转化轮系法计算行星轮系效率的理论基础是行星轮系的转化轮系和原行星轮系的差别,仅在于给整个行星轮系附加了一个公共角速度“ -ξH ”。
经过这样的转化之后,各构 件之间的相对运动没有改变,而轮系各运动副中的作用力(当不考虑构件回转的离心惯性力时)以及摩擦因数也不会改变。
因而行星轮系与其转化轮系中的摩擦损失功率应相等。
用转化轮系法计算行行轮系效率没有考虑由于加工、安装和使用情况等的不同,以及还有一些影响因素如搅油损失、行星轮在公转中的离心惯性力等,因此理论计算的结果并不能完全正确地反映传动装置的实际效率。
11-4 何谓正号机构、负号机均,各有何特点?各适用什么场合?答:行星轮系的转化轮系中当传动比i H > 0 ,称为正号机构;当传动比i H < 0 ,称为负号机构。
轮系习题答案

b
2
4、已知
n3
Z1 30 Z 2 25 Z 2 20 Z 3 75
求nH
n1 200r / min n3 50r / min
2′
n1、 n2 反向
n1 1 3
解:
n1 nH Z 2 Z3 6.25 25 75 (-) n3 nH Z1Z 2 2 30 20
200 nH 6.25 50 nH 2
nH ≈10.7(r/min)
5、在图示的电动三爪卡盘转动轮系中,设已知各轮齿数为: Z1=6、 Z2=Z2′=25、 Z3=57、 Z4=56。 试求传动比i14。
2 2′
解: 这是一3k-H 型周转轮系 列方程: 在1-2-3-H中:
1 3
H
4
z3 n1 nH 57 6 n3 nH z1
在4 - 2′-2 -3-H中:
(1)
得: n1
21 NH 2
(2)
1 n4 nH z2 z3 25 57 57 n (3) 得: 4 nH (4) 56 n3 nH z4 z2 56 25 56 n1 21 (2) ÷ (4)得: i14 56 588 n4 2
b
5-6、在图示液压回转台的传动机构中,已知z2=15,液压马 达M的转速Nm=12r/min,回转台H的转速nH=-1﹒5r/min,求 齿轮的齿数。 解:此轮系为行星轮系 1-2-H,列方程:
n2 nH nM
n1 nH Z 2 n2 nH Z1
(1)
n2 nH nM 12r / min,又n1 0
机械设计基础习题解答第11章
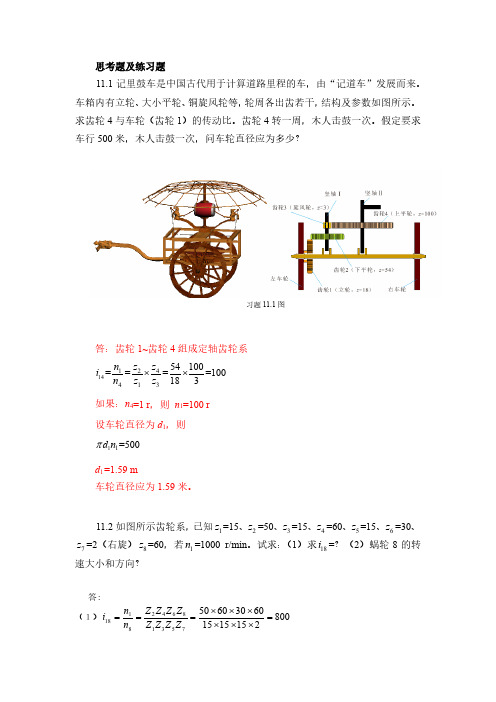
思考题及练习题11.1记里鼓车是中国古代用于计算道路里程的车,由“记道车”发展而来。
车箱内有立轮、大小平轮、铜旋风轮等,轮周各出齿若干,结构及参数如图所示。
求齿轮4与车轮(齿轮1)的传动比。
齿轮4转一周,木人击鼓一次。
假定要求车行500米,木人击鼓一次,问车轮直径应为多少?答:齿轮1~齿轮4组成定轴齿轮系1412441354100====100183i n z z n z z ×× 如果:n 4=1 r ,则 n 1=100 r设车轮直径为d 1,则11=500d n πd 1=1.59 m车轮直径应为1.59米。
11.2如图所示齿轮系,已知1z =15、2z =50、3z =15、4z =60、5z =15、6z =30、7z =2(右旋)8z =60,若1n =1000 r/min 。
试求:(1)求18i =?(2)蜗轮8的转速大小和方向?答:(1)800215151560306050753186428118=××××××===Z Z Z Z Z Z Z Z n n i习题11.1图(2)18181000 1.25r /min 800n n i === 方向用画箭头方法确定,为顺时针方向。
11.3. 如图所示轮系,已知齿轮齿数1z =30、2z =20、3z =30、4z =20、5z =80 、蜗杆头数6z =1、蜗轮齿数7z =60,齿轮1转速n 1=1200 r/min ,方向如图中箭头所示,求齿轮1与蜗轮7的传动比17i ,蜗轮7的转速n 7,并在图中标出其转动方向。
答: 解:235711771246203080602403020201z z z z n i n z z z z ×××====××× 171712005r /min 240n n i === 方向用画箭头方法确定,为逆时针方向。
机械原理课后答案第11章
第11章作业11-1在给定轮系主动轮的转向后,可用什么方法来确定定轴轮系从动轮的转向?周转轮系中主、从动件的转向关系又用什么方法来确定?答:参考教材216~218页。
11-2如何划分一个复合轮系的定轴轮系部分和各基本周转轮系部分?在图示的轮系中,既然构件5作为行星架被划归在周转轮系部分中,在计算周转轮系部分的传动比时,是否应把齿轮5的齿数,Z5计入?答:划分一个复合轮系的定轴轮系部分和各基本周转轮系部分关键是要把其中的周转轮系部分划出来,周转轮糸的特点是具有行星轮和行星架,所以要先找到轮系中的行星轮,然后找出行星架。
每一行星架,连同行星架上的行星轮和与行星轮相啮合的太阳轮就组成一个基本周转轮糸。
在一个复合轮系中可能包括有几个基本周转轮系(一般每一个行星架就对应一个基本周转轮系),当将这些周转轮一一找出之后.剩下的便是定轴轮糸部分了。
在图示的轮系中.虽然构件5作为行星架被划归在周转轮系部分中,但在计算周转轮系部分的传动比时.不应把齿轮5的齿数计入。
11-3在计算行星轮系的传动比时,式i mH=1-i H mn只有在什么情况下才是正确的?答在行星轮系,设固定轮为n, 即ωn=0时, i mH=1-i H mn公式才是正确的。
11-4在计算周转轮系的传动比时,式i H mn=(n m-n H)/(n n-n H)中的i H mn是什么传动比,如何确定其大小和“±”号?答: i H mn是在根据相对运动原理,设给原周转轮系加上一个公共角速度“-ωH”。
使之绕行星架的固定轴线回转,这时各构件之间的相对运动仍将保持不变,而行星架的角速度为0,即行星架“静止不动”了.于是周转轮系转化成了定轴轮系,这个转化轮系的传动比,其大小可以用i H mn=(n m-n H)/(n n-n H)中的i H mn公式计算;方向由“±”号确定,但注意,它由在转化轮系中m. n两轮的转向关系来确定。
11-5用转化轮系法计算行星轮系效率的理论基础是什么?为什么说当行星轮系为高速时,用它来计算行星轮系的效率会带来较大的误差?答: 用转化轮系法计算行星轮系效率的理论基础是行星轮系的转化轮系和原行星轮系的差别,仅在于给整个行星轮系附加了一个公共角速度“-ωH”。
机械原理复习题(第11章)答案Microsoft Word 文档

第11章 齿轮系及其设计一、简答题: 1、(1)轮系按轴线在空间位置是否变动可以分为普通轮系(或定轴轮系)、周转轮系、复合轮系。
(2)普通轮系所有的轴线位置在运动过程中均固定不动的轮系。
周转轮系是在运动过程中至少有一个齿轮的几何轴线的位置不固定。
复合轮系由定轴轮系和周转轮系或者由两个以上的周转轮系组成。
二、分析、计算题: 1、解题要点:区分基本轮系,由齿轮1、2-2'、3及系杆4组成差动轮系;由齿轮1、2、5 及系杆4组成差动轮系;齿轮5、2-2'、3 及系杆4组成差动轮系;由齿轮1'、6、3 组成定轴轮系。
其中三个周转轮系并不是独立的,任取两个周转轮系求解,结果是一样的。
解: 1)求齿数1z 和3z 。
因为齿轮1和齿轮5同轴线 所以有:2521r r r r +=- 由于各齿轮模数相同,则有:75252252251=⨯+=+=z z z因为齿轮3和齿轮5同轴线,所以有:3225r r r r +=+' 由于各齿轮模数相同,则有302025252253=-+=-+='z z z z 2)由齿轮1、2-2'、3及系杆4组成差动轮系有212075302521324341413-=⨯⨯-=-=--='z z z z n n n n i (1)3)由齿轮1、2、5及系杆4组成差动轮系有317525154541415-=-=-=--=z z n n n n i (2)4)齿轮1'、6、3组成定轴轮系,齿轮1'和3'轴线重合,且齿数相同有: 113313131-=-===''''''z z n n n n i13n n -= (3) (采用画箭头法判别31''i 的“+”、“-”号)将式(3)代入式(1): )(214141n n n n ---=-解得 413n n = (4)将式(4)代入式(2):)(3134544n n n n --=-解得 54554-==n n i ; 齿轮5和系杆4转向相反。
轮系-习题及答案
轮系一、复习思考题1.为什么要应用轮系?试举出几个应用轮系的实例?2.何谓定轴轮系?何谓周转轮系?行星轮系与差动轮系有何区别? 3.什么叫惰轮?它在轮系中有什么作用?4.定轴轮系的传动比如何计算?式中(-1)m有什么意义? 5.定轴轮系末端的转向怎样判别?6.如果轮系的末端轴是螺旋传动,应如何计算螺母的移动量?二、填空题1.由若干对齿轮组成的齿轮机构称为 。
2.根据轮系中齿轮的几何轴线是否固定,可将轮系分 轮系、 轮系和 轮系三种。
3.对平面定轴轮系,始末两齿轮转向关系可用传动比计算公式中 的符号来判定。
4.行星轮系由 、 和 三种基本构件组成。
5.在定轴轮系中,每一个齿轮的回转轴线都是 的。
6.惰轮对 并无映响,但却能改变从动轮的 方向。
7.如果在齿轮传动中,其中有一个齿轮和它的 绕另一个 旋转,则这轮系就叫周转轮系。
8.旋转齿轮的几何轴线位置均 的轮系,称为定轴轮系。
9.轮系中 两轮 之比,称为轮系的传动比。
10.加惰轮的轮系只能改变 的旋转方向,不能改变轮系的 。
11.一对齿轮的传动比,若考虑两轮旋转方向的同异,可写成±==21n n i ——。
12.定轴轮系的传动比,等于组成该轮系的所有 轮齿数连乘积与所有 轮齿数连乘积之比。
13.在周转转系中,凡具有 几何轴线的齿轮,称中心轮,凡具有 几何轴线的齿轮,称为行星轮,支持行星轮并和它一起绕固定几何轴线旋转的构件,称为 。
14.周转轮系中,只有一个 时的轮系称为行星轮系。
15.转系可获得 的传动比,并可作 距离的传动。
16.转系可以实现 要求和 要求。
17.转系可以 运动,也可以 运动。
18.采用周转轮系可将两个独立运动 为一个运动,或将一个独立的运动 成两个独立的运动。
19.差动轮系的主要结构特点,是有两个。
20.周转轮系结构尺寸,重量较。
21.周转轮系可获得的传动比和的功率传递。
三、判断题1.转系可分为定轴轮系和周转轮系两种。
轮系答案

轮系习题答案一、填空1. 各齿轮的轴线相对机架都是固定的。
至少一个齿轮的几何轴线相对机架不是固定的。
2.中心轮 行星轮 行星架(系杆、转臂)3.中心轮,行星轮,行星架(系杆〕实际轮系的传动比,转化轮系(转化机构)的传动比4.惰轮5.2 16.转化轮系二、判断题1.Y 2.N 3.N 4.N三、计算题1.解:(1)5、6定轴轮系。
1、2、3、4 、H (5)行星轮系,构件5是系杆。
(2)2516252520201314215514=⨯⨯=⋅⋅=-=z z z z i i 2592516115=-=i (3〕5110020566556-=-=-==z z n n i (4)1259)51(259561516-=-⋅=⋅=i i i 2.解:(1) 1-2组成定轴轮系。
n n A 1= i n n z z 12122140202==-=-=- (2) 2′-3-3′- 4 - B 周转轮系,B 为系杆H 。
9.120503030111 3 2434 2 2=⨯⨯+=+=-=z z z z i i H H (3) 混合轮系8.3)9.1()2( 21211-=⨯-====H HH AB i i n n i i n B 和n A 转向相反。
3.解:.(1) 1-2组成定轴轮系n z z n 212120801000250=-=-⨯=-r/min 32n n =(2) 3-4-4′-5-B 组成周转轮系32020602010 43543335-=⨯⨯-=-=-=--=z z z z n n n n n i H H H H (3) 43=Hn n 5.62)250(41413-=-⨯===n n n H B r/min 4.解: (1) 1、2、2'、3、H 为行星轮系。
B 为系杆,4n n A =。
21323113z z z z n n n n i B B B -=--= B n z z z z n )1(32 213+= (2) 3'、4为定轴轮系。
第11章 课后习题答案 .doc

第11章课后习题答案11-1 解1)由公式可知:轮齿的工作应力不变,则则,若,该齿轮传动能传递的功率11-2解由公式可知,由抗疲劳点蚀允许的最大扭矩有关系:设提高后的转矩和许用应力分别为、当转速不变时,转矩和功率可提高69%。
11-3解软齿面闭式齿轮传动应分别验算其接触强度和弯曲强度。
(1)许用应力查教材表11-1小齿轮45钢调质硬度:210~230HBS取220HBS;大齿轮ZG270-500正火硬度:140~170HBS,取155HBS。
查教材图11-7,查教材图11-10 ,查教材表11-4取,故:(2)验算接触强度,验算公式为:其中:小齿轮转矩载荷系数查教材表11-3得齿宽中心距齿数比则:、,能满足接触强度。
(3)验算弯曲强度,验算公式:其中:齿形系数:查教材图11-9得、则:满足弯曲强度。
11-4解开式齿轮传动的主要失效形式是磨损,目前的设计方法是按弯曲强度设计,并将许用应力降低以弥补磨损对齿轮的影响。
(1)许用弯曲应力查教材表11-1小齿轮45钢调质硬度:210~230HBS取220HBS;大齿轮45钢正火硬度:170~210HBS,取190HBS。
查教材图11-10得,查教材表11-4 ,并将许用应用降低30%故(2)其弯曲强度设计公式:其中:小齿轮转矩载荷系数查教材表11-3得取齿宽系数齿数,取齿数比齿形系数查教材图11-9得、因故将代入设计公式因此取模数中心距齿宽11-5解硬齿面闭式齿轮传动的主要失效形式是折断,设计方法是按弯曲强度设计,并验算其齿面接触强度。
(1)许用弯曲应力查教材表11-1,大小齿轮材料40Cr 表面淬火硬度:52~56HRC,取54HRC。
查教材图11-10得,查材料图11-7得。
查教材表11-4 ,因齿轮传动是双向工作,弯曲应力为对称循环,应将极限值乘70%。
故(2)按弯曲强度设计,设计公式:其中:小齿轮转矩载荷系数查教材表11-3得取齿宽系数齿数,取齿数比齿形系数应将齿形系数较大值代入公式,而齿形系数值与齿数成反比,将小齿轮的齿形系数代入设计公式,查教材图11-9得因此取模数(3)验算接触强度,验算公式:其中:中心距齿宽,取满足接触强度。
第十一章__典型题解析.doc

第十一章 典型题解析例11.1 在图11.1所示轮系中,已知双头右旋蜗杆的转速n 1=900r/min ,转向如图所示,z 2=60,/2z =25,z 3=20,/3z =325,z 4=20。
求n 4的大小与方向。
分析 这是一个定轴轮系,其中又包含了蜗轮蜗杆、圆柱齿轮、圆锥齿轮,而且轮1和轮4的转动方向不一样,因此轮系传动比的方向宜用标箭头法来表示。
解 2.192525260202014/3/21234=⨯⨯⨯⨯==z z z z z z i 方向如图所示。
2.19900=n =46.875r/min 方向如图所示。
[评注] 轮系传动比的计算中,用标箭头法确定齿轮的转向使用范围广,尤其是轮系中有蜗轮蜗杆传动、圆锥齿轮传动,标箭头法更适用。
例11.2 已知图11.2所示轮系中各轮的齿数z 1=20,z 2=40,z 3=15,z 4=60,轮1的转速为n 1=120r/min ,转向如图所示。
试求轮3的转速n3的大小和转向。
图11.1 图11.2分析 在此轮系中,轮3是一轴线不固定的行星轮,因此轮3,轮4和轮2(H )组成了一周转轮系,轮2和轮1组成了定轴轮系。
解 设n 1↓为“+”。
对于轮1,轮2组成的定轴轮系,有22040122112-=-=--=z z n n i min /60120212r n -=⨯-= 对于轮2,轮3和轮4组成的轮系,有41560342423234-=-=-=--=z z n n n n imin/3004606033r n n -=-=+ 方向为↑。
[评注] 在此轮系中的周转轮系中,只有一个中心轮且为固定的,这与常见的2K-H (K :中心轮的个数)型轮系不同,但在计算中,所采用的转化轮系计算法是相同的。
例11.3 在图11.3所示轮系中,齿轮均是正确安装的标准齿,轮1的转动方向如图所示,已知各轮齿数为z 1=20,z 2=25,z 4=25,z 5=20。
试求传动比i 17和轴Ⅱ的转向。
第11章习题及其答案
Z4=30 Z3'=1 Z4'=18
Z5=52
Z2=50
Z1=20
Z3=30 Z2'=15
题图 11-7
解:方向判断用画箭头的方法完成,从左往右看时的转向为逆时针方向。
i15
=
n1 n5
=
z2 z3z4 z5 z1z2'z3 ' z4'
=
20 × 30 × 40 × 52 20 ×15 ×1×18
= 577.7r / min
, z3 = 15 , z3′ = 30 , z4 = 40 , z4′ = 40 , z5 = 40 , z5′ = 20 。试确定传动比 iAB 及轴 B
的转向。
2 3' 2'
4' 3
B
2" 4
A
1
n1 左
5
5'
题图 11-13
解:(1)2〞-3-3′-4-H 为差动轮系,1-2 为定轴轮系,1-2-2′-5-5′-4′为定轴
比,如何确定其大小和“ ± ”号? 答:imH 是在根据相对运动原理,设给原周转轮系加上一个公共角速度“ −ωH ”,使之绕
行星架的固定轴线回转,这时各构件之间的相对运动仍将保持不变。而行星架的角速度为 0, 即行星架“静止不动”,于是周转轮系转化成了定轴轮系,这个转化轮系的传动比。其大小可
以用 imH = (nm − nH ) / (nn − nH ) 公式计算;方向由“ ± ”号确定,但注意,它由在转化轮系中
=−
z2 z3 z1z2
i14
= 1 − i143
=1+
z2 z3 z1z2
=
3.2941
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、填空题:1.轮系可以分为:定轴轮系和 周转轮系 。
2.定轴轮系是指:当轮系运动时,各轮轴线位置固定不动的轮系;周转轮系是指:轮系运动时,凡至少有一个齿轮的轴线是绕另一齿轮的轴线转动的轮系。
3.周转轮系的组成部分包括: 太阳轮 、 行星轮 和 行星架 。
4.行星轮系具有 1个自由度,差动轮系有 2自由度。
5、行星轮系的同心条件是指:要使行星轮系能正常运转,其基本构件的回转线必须在同一直线上。
6、确定行星轮系中各轮齿数的条件包括:传动比条件、同心条件、均布条件、邻接条件。
7、正号机构和负号机构分别是指:转化轮系的传动比H 1n i 为正号或者负号的周转轮系。
动力传动中多采用 负号 机构。
二、分析计算题 1、在图示的车床变速箱中,移动三联齿轮a 使3’和4’啮合。
双移动双联齿轮b 使齿轮5’和6’啮合。
已知各轮的齿数为z 1=42,582=z ,38'3=z ,42'4=z ,48'5=z ,48'6=z 电动机的转速为n 1=1445r/min ,求带轮转速的大小和方向。
解:3858483842484258'5'31'6'426116-=⨯⨯⨯⨯=-==z z z z z z n n i min /9466r n -=(与电动机转动方向相反)2、在图示的轮系中,已知各轮齿数为20z z z z z 65321=====, 已知齿轮1、4、5、7为同轴线,试求该轮系的传动比17i 。
(1)z z z z z 41231225520100=++==⨯=z z z z 75612332060=+==⨯=(2)iz z z z zz z z z z17323467123561=-()=-⨯⨯=-100602020153、在图示轮系中,已知:蜗杆为单头且右旋,转速n11440= r/min,转动方向如图示,其余各轮齿数为:402=z,20'2=z,303=z,18'3=z,544=z,试:(1)说明轮系属于何种类型;(2)计算齿轮4得转速n4;(3)在图中标出齿轮4的转动方向。
(1)定轴轮系(2)nz z z nz z z412312341201840305414408=⋅⋅⋅⋅⋅=⨯⨯⨯⨯⨯=''r/min(3)n4方向←。
4、如图所示为一手摇提升装置,其中各轮齿数均已知,试求传动比15i,并指出当提升重物时手柄的转向(从左往右看时的转向)解:方向判断用画箭头的方法完成,从左往右看时的转向为逆时针方向。
2345115''5123420304052'2015118577.7z z z znin z z z z⨯⨯⨯===⨯⨯⨯=5、在图示周转轮系中,已知各齿轮的齿数60,20,25,153'221====z z z z ,齿轮1的转速m in /2001r n =,齿轮3的转速m in /503r n =,其转向相反。
(1) 求行星架H 的转速n H 的大小和方向; (2) 当轮3固定不动时,求n H 的大小和方向。
解 ⑴图示为一差动轮系。
其转化机构的传动比为520156025'21323113-=⨯⨯-=⨯⨯-=--=z z z z n n n n i H H H设齿轮1的转速为正值,则齿轮3的转速为负值,将已知值代入得min /33.86506)50(52006531r n n n H -=-=-+=+=转向与齿轮3的转向相同。
(2)当轮3固定不动时,Hi i 13131-==6,H n =33.3r/min ,方向与n 1的方向相同6、在图示自动化照明灯具的传动装置中,已知输入轴的转速n 1=19.5r/min ,各齿轮的齿数为z 1=60,z 2=z 3=30,z 4=z 5=40,z 6=120,求箱体B 的转速n B 。
解:将该传动装置反转(B n -),转化后的轮系为定轴轮系,其传动比为:23060120305316426116-=⨯⨯-=⨯⨯⨯⨯-=--=z z z z z z n n n n i B B B31161=-=BB i i所以,m in /5.6r n B =,方向与n 1的方向相同7、已知轮系中,20,15,60'221===z z z 各轮模数均相等,求H i z 13及。
解⑴图示为一行星轮系。
⑵由同心条件得()()'232122z z m z z m-=- 所以651520602'213=-+=-+=z z z z⑶0,3'21323113==--=n z z zz n n n n i H H H1631613120606515111'2132131=-=⨯⨯-=-=-=z z z z i i HH 8、在图示轮系中,各齿轮均是模数相等的标准齿轮,并已知,22,3421==z z 184=z ,886=z 。
试求齿数3z 及5z ,并计算传动比AB i 。
解:根据同心条件:78222342213=⨯+=+=z z z1-2-3-4组成行星轮系(4为系杆)21324341413z z zz n n n n i -=--=2941.311213241314=+=-=z z z z i i 4-5-6-B 组成行星轮系0,6466446=-=--=n z zn n n n i B B B8889.518/1061146464==+=-=z z i i BB 3987.1944=⨯=B A AB i i i (A 和B 的转向一致)9、在图示轮系中,单头右旋蜗杆1的回转方向如图,各轮齿数分别为372=z ,15'2 =z ,253=z ,20'3 =z ,604=z ,蜗杆1的转速14501=n r/min,方向如图。
试求轴B 的转速n B 的大小及方向(标明从右往左看时的旋向)。
解:1、2为定轴轮系n n z z n n 12212137137=== 方向↑。
2'、3、3'、4、B 为周转轮系。
3 243B 4B 2B4 2z z zz n n n n i -=--=3 24321z z z z n n B +=, n n 22'=。
r/min 53.643 3 23 2B =+=z z z z z z n 转向同n 2'↑。
10、在图示的复合轮系中,设已知n 1=3549r/min ,又各轮齿数为z 1=36,z 2=60,z 3=23,z 4=49,z 4’=69,z 6=131,z 7=94,z 8=36,z 9=167,试求行星架H 的转速H n (大小及转向)?解:转向用画箭头的方法表示1-2-3-4组成定轴轮系55.331424114===z z z z n n i 4’-5-6-7组成行星轮系(7为行星架)0,6'46767'4764'=-=--=n z zn n n n i8986.2'114676'47'4=+=-=z z i i 7-8-9-H 组成行星轮系0,9799779=-=--=n z zn n n n i H H H=+=-==79797711z z i n n i HH H 2.7766 571.28747141=⨯⨯=H H i i i i ,min /2.12411r i n n HH ==行星架转动方向与齿轮4的回转方向相同11、在图示双螺旋桨飞机的减速器中,已知18,30,20,265421====z z z z ,及1n =15000r/min ,试求Q P n n 和的大小和方向。
(提示:先根据同心,求得3z 和6z 后再求解。
)解:根据同心条件:66202262213=⨯+=+=z z z 66182205246=⨯+=+=z z z4-5-6-Q 组成行星轮系 Q Q Q Qi z z n n n n i 44664461-=-=--=(1) 1-2-3-P 组成行星轮系 P pp Pi z z n n n n i 11331131-=-=--=(2) 轮系之间的关联:4P n n =(3)323.11.4141==Q Q i i i ,min /737.1324r n Q =(与n 1同向)5385.311314=-=Pi i ,m in /4329r n P =(与n 1同向)12、如图所示轮系,已知25'21==z z ,100=H z ,20432===z z z 。
求传动比41i 。
解 (1)图示为一复合轮系。
(2)1-2-2’-3-H 组成行星轮系,其传动比为H H H Hi z z zz n n n n i 1'213231131-=⨯⨯=--=()25925252020111'213221=⨯⨯-=⨯⨯--=z z z z i H(3)由齿轮4和行星架H 组成定轴轮系,5110020444-=-=-==H H H z z n n i (4)125951259414114-=⎪⎭⎫ ⎝⎛-⨯=•==H H i i n n i41i =9125-齿轮1和齿轮4的转向相反。
13、在图示轮系中,已知各轮齿数分别为381=z ,,202=z ,18z '14==z 19'4=z ,38z 5=,88' 5=z ,,336=z 36'6=z ,907=z ,188=z 。
试问:齿轮7转一圈,齿轮8转多少圈?两者转向是否相同?2-1-1’-3-4-4’-5组成定轴轮系519191820381838'43'1254315225-=⨯⨯⨯⨯-=-==z z z z z z z z n n i (1) 5’-6-6’-7(8)组成差动轮系163'6 '586H 8H '5H 8'5-=-=--=z z z z n n n n i (2)1615'6 '576H 7H '5H 7'5==--=z z z z n n n n i (3)关联:25'5,n n n n H == (4)联立解以上方程得到584.29n n -= 5732.1n n = 7827.22n n -=也就是说,当齿轮7转动一圈时,齿轮8要反方向专动22.27圈,二者的方向相反。