西工大机械原理第五章
西北工业大学机械原理课后答案第5章

第五章 机械的效率和自锁题5-5解: (1)根据己知条件,摩擦圆半径 m r f v 002.001.02.0=⨯==ρ ︒==53.8arctan f φ 计算可得图5-5所示位置︒=67.45α ︒=33.14β (2)考虑摩擦时,运动副中的反力如图5-5所示。
(3)构件1的平衡条件为:()ρα2sin 211+=AB R l F M()[]ρα2sin 2321+==AB R R l M构件3的平衡条件为:034323=++R R 按上式作力多边形如图5-5所示,有()()φβφ--︒=+︒90sin 90sin 323F F R(4)()()()φραφβφφβcos 2sin cos cos 90sin 1233++=--︒=AB R l M F F ()αβs i n c o s 130AB l M F = (5)机械效率:()()91.09889.09688.007553.09214.007153.0cos cos 2sin cos sin 303=⨯⨯⨯=++==φβραφβαηAB AB l l F FF R 12F R 41图5-5F F R 21F R43题5-2解: (1)根据己知条件,摩擦圆半径 22vf d =ρ 11a r c t a n f =φ 22a r c t a n f =φ 作出各运动副中的总反力的方位如图5-2所示。
(2)以推杆为研究对象的平衡方程式如下:∑=0xF 0cos cos sin 232132112=''-'+φφφR RR F F F ∑=0yF0sin sin cos 232132112=''-'--φφφR RR F F G F ∑=0CM()0c o s c o s s i n c o s 2s i n 1122232232112=⋅⋅-⋅''+⋅''+++θφφφφe F d F l F d Gl b F R R R R(3)以凸轮为研究对象的平衡方程式如下:h F M R ⋅=12 ()11cos tan sin cos φφθθρe r e h +++=(4)联立以上方程解得()[]21tan cos 21tan sin cos φθφθθρle e r e G M -+++=θc o s 0Ge M = ()()120tan sin cos tan cos 21cos φθθρφθθηe r e c l e e M M +++-==讨论:由于效率计算公式可知,φ1,φ2减小,L 增大,则效率增大,由于θ是变化的,瞬时效率也是变化的。
机械原理西北工业大学
机械原理电子教案第一章绪论基本要求:1.明确机械原理课程的研究对象和内容,以及学习本课程的目的。
2.了解机械原理在培养机械类高级工程技术人才全局中的地位、任务和作用。
3.了解机械原理学科的发展趋势。
教学内容:1.机械原理课程的研究对象2.机械原理课程的研究内容3.机械原理课程的地位及学习本课程的目的4.机械原理课程的学习方法重点难点:本章的学习重点是机械原理课程的研究对象和内容,机器、机构和机械的概念,机器和机构的用途以及区别;了解机械原理课程的性质和特点。
1.1机械原理课程的研究对象机械是人类用以转换能量和借以减轻人类劳动、提高生产率的主要工具,也是社会生产力发展水平的重要标志。
机械工业是国民经济的支柱工业之一。
当今社会高度的物质文明是以近代机械工业的飞速发展为基础建立起来的,人类生活的不断改善也与机械工业的发展紧密相连。
机械原理(Theory of Machines and Mechanisms)是机器和机构理论的简称。
它以机器和机构为研究对象,是一门研究机构和机器的运动设计和动力设计,以及机械运动方案设计的技术基础课。
机器的种类繁多,如内燃机、汽车、机床、缝纫机、机器人、包装机等,它们的组成、功用、性能和运动特点各不相同。
机械原理是研究机器的共性理论,必须对机器进行概括和抽象内燃机与机械手的构造、用途和性能虽不相同,但是从它们的组成、运动确定性及功能关系看,都具有一些共同特征:(1)人为的实物(机件)的组合体。
(2)组成它们的各部分之间都具有确定的相对运动。
(3)能完成有用机械功或转换机械能。
凡同时具备上述3个特征的实物组合体就称为机器内燃机和送料机械手等机器结构较复杂,如何分析和设计这类复杂的机器呢?我们可以采取“化整为零”的思想,即首先将机器分成几个部分,对其局部进行分析。
机构是传递运动和动力的实物组合体。
最常见的机构有连杆机构、凸轮机构、齿轮机构、间歇运动机构、螺旋机构、开式链机构等。
西北工业大学机械原理习题答案
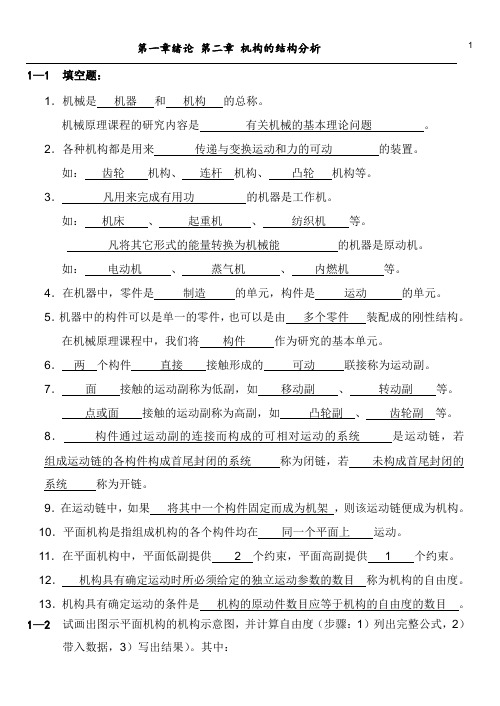
p'=0F'=1
F=3n-(2pl+ph-p′)-F′
=3×10-(2×13+2-0)-1=1
机构原动件数目=1
机构有无确定运动?有确定运动
1—91)按传动顺序用数字1、2、3…在图示机构上给构件编号。
2)计算自由度,并判断机构有无确定运动:
在图中指明:复合铰链、局部自由度和虚约束
2为了使冲头6得到上下运动,只要有机构CDE即可,为什还要引入机构ABC?(可在学过第三章后再来想想)
1—5图a)所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮1输入,使轴A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
2.计算机构自由度的目的是什么?
3.当机构的自由度小于1时,可通过哪些途径来增加自由度?本题中还可列出哪些简单而又适用的修改方案?
计算1-6~1-9题各机构的自由度。
1—61)按传动顺序用数字1、2、3…在图示机构上给构件编号。
2)计算自由度,并机构判断有无确定运动:
在图中指明复合铰链、局部自由度和虚约束
解:属于两构件间重合点的问题
思路:因已知B2点的运动,故通过B2点求B3点的运动。
1)速度分析
方向:⊥BD ⊥AB ∥CD
大小: ? ω12l?
在速度多边形中,∵b3与极点p重合,∴vB3=0
且ω3=vB3/lBD=0,由于构件2与构件3套在一起,∴ω2=ω3=0
2) 加速度分析
方向: ⊥BD B→A ∥CD
p'=0F'=0
F=3n-(2pl+ph-p′)-F′
机械原理课件 第5章 机械的效率和自锁 西工大版

Pd
η1 1
P
η2 2
0.98
P
0.96
0.96
0.98
' ' ' ' P' P' P' P' 0.2kW = ' ' η5 η' 4' 5' 3' η4 3
0.94 0.94 0.42
解:机构 1、2、3′及 4′串联的部分 P′ =P′r /(12′3′4 ) =5kW/(0.982×0.962)=5.649 kW d 机构1、2、3" 、4" 及5" 串联的部分 "" " P" =P"/(123 4 5 ) =0.2kW/(0.982×0.942×0.42)=0.561kW d r
§5-1 机械的效率
4、机组的机械效率计算(续)
(3)混联
混联机组的机械效率计算步骤为:
1)首先将输入功至输出功的路线弄清楚; 2)然后分别计算出总的输入功率∑Pd和总的输出功率∑Pr;
3)最后按下式计算其总机械效率: =∑Pr /∑Pd
§5-1 机械的效率
例5-2:设已知某机械传动装置的机构的效率和输出功率,求 该机械传动装置的机械效率。 P' P' P'=5kW ' η' η' 44 33
放松时 G0 / G tan( V ) tan
§5-1 机械的效率
3、机械效率的确定(续)
(2)机械效率的试验测定
机械效率的确定除了用计算法外,更常用实验法来测定, 许多机械尤其是动力机械在制成后,往往都需作效率实验。
对于正在设计和制造的机械,虽然不能直接用实验法测定 其机械效率,但由于各种机械一般都是由一些常用机构组合而 成的,而常用机构的效率又是可通过实验积累的资料来预先估 定的(见表5-1 简单传动机构和运动副的效率)。 据此,可通过 计算确定出整个机械的效率。 同理,对于由许多机器组成的机组,如果已知机组中各台 机器的效率,就可以计算出整个机组的总效率。
西北工业大学机械设计第八版第五章答案
第五章参考答案5-2答:可以减小螺栓的刚度,从而提高螺栓联接的强度。
5-3 解:⎪⎭⎫⎝⎛=++==21202243.1,,4d F F C C C F F z D P F ca m b b πσπ最大应力出现在压缩到最小体积时,最小应力出现在膨胀到最大体积时。
当汽缸内的最高压力提高时,它的最大应力增大,最小应力不变。
5-4 解:将∑F 力等效转化到底板面上,可知底板受到轴向力y F ∑,横向力x F ∑和倾覆力矩M 。
1) 底板最左侧的螺栓受力最大,应验算该螺栓的拉伸强度,要求拉应力[]σσ≤。
2) 应验算底板右侧边缘的最大挤压应力,要求最大挤压应力[]pp σσ≤max ,0minp σ。
3) 应验算底板在横向力的作用下是否会滑移,要求摩擦力2F F f 。
5-5 解:采用铰制孔螺栓联接为宜,因为托架所承受的载荷有较大变动,普通螺栓联接靠接合面产生的摩擦力矩来抵抗转矩。
用普通螺栓时,由公式:()∑==+++≥z i is z s r f TK r r r f T K F 1210...和[]σπσ≤=21043.1d F ca 可求得螺栓的最小直径;用铰制孔螺栓时,由公式∑==zi irTr F 12maxmax 及挤压强度和剪切强度公式可以计算出此时的最小直径,两个直径进行比较可得出用铰制孔螺栓的直径小。
5-6 解:螺栓组受到剪力F 和转矩()FL T T =作用,设剪力F 分在各螺栓上的力为i F ,转矩T 分在各螺栓上的力为Tj F 。
在图(a )螺栓布置方案中,各螺栓轴线到螺栓组对称中心的距离都为mm r 125=,故kN rT F kN F F Tj i 206,1061====,所以各螺栓受力最大为kN F a 302010=+= 在图(b )螺栓布置方案中,最大螺栓所受的力为:,1061kN F F i ==kN r Tr F z i i Tj 4.2412max max ==∑= 所以合外力为:kN F F F F F j i Tj i b 6.33cos 2max 2max 2=++=θ由以上可得出,采用(a )所用的螺栓直径较小。
机械原理(西北工业大学第七版)习题选解
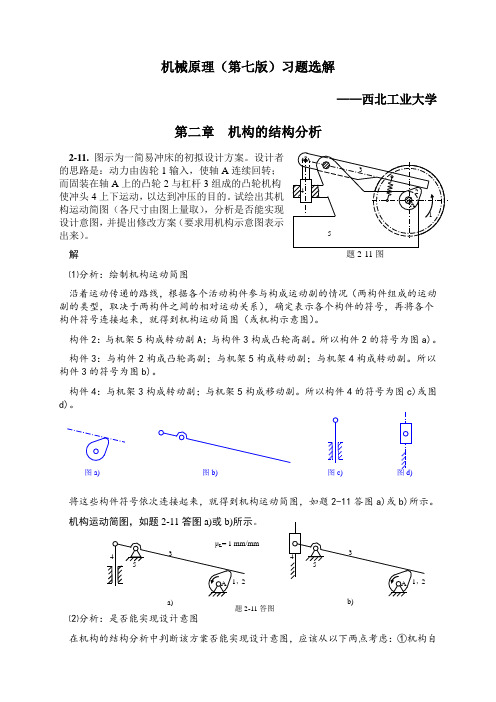
机械原理(第七版)习题选解——西北工业大学第二章机构的结构分析2-11.图示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案(要求用机构示意图表示出来)。
解⑴分析:绘制机构运动简图沿着运动传递的路线,根据各个活动构件参与构成运动副的情况(两构件组成的运动副的类型,取决于两构件之间的相对运动关系),确定表示各个构件的符号,再将各个构件符号连接起来,就得到机构运动简图(或机构示意图)。
构件2:与机架5构成转动副A;与构件3构成凸轮高副。
所以构件2的符号为图a)。
构件3:与构件2构成凸轮高副;与机架5构成转动副;与机架4构成转动副。
所以构件3的符号为图b)。
构件4:与机架3构成转动副;与机架5构成移动副。
所以构件4的符号为图c)或图d)。
题2-11图图a) 图b) 图c)将这些构件符号依次连接起来,就得到机构运动简图,如题2-11答图a)或b)所示。
机构运动简图,如题2-11答图a)或b)所示。
⑵分析:是否能实现设计意图在机构的结构分析中判断该方案否能实现设计意图,应该从以下两点考虑:①机构自由度是否大于零;②机构原动件的数目是否等于机构自由度的数目。
因此,必须计算该机构的自由度F=3n-(2p L +p H )=3×3-(2×4+1)=0。
因为机构的自由度为 F=3n-(2p L +p H )=3×3-(2×4+1)=0 可知,该机构不能运动,不能实现设计意图。
⑶分析修改方案因为原动件的数目为1,所以修改的思路为:将机构的自由度由0变为1。
因此,修改方案应有2种。
方案1:给机构增加1个构件(增加3个独立运动)和1个低副(增加2个约束),使机构自由度增加1,即由0变为1。
机械原理_课后习题答案免费(全面)高教版 西北工大
2) 求vC2
v C 2 = v B + v C 2 B = v C 3 + vC 2 C 3
方向: 大小: ⊥AB
√
⊥BC ?
0 0
∥BC ?
取
μv = 0.005
m/s mm
作速度图
b
题3-10 解(续2)
[解] (2)速度分析
v B → vC 2 → v D , v E → ω 2
1) 求vB 2) 求vC2 3) 求vD 和求vE 用速度影像法
C
E
vC = v B + vCB v D = v B + v DB
(2) 求vE
D p(a, f )
v E = vC + v EC = v D + v ED
b d e c
题3-5 解
b) 解: 顺序 (1) 求vC
v B → vC → v E → v F
D B vB A E G F C
vC = v B + vCB
√
0 0
∥CD ?
b2 (b1) (b3)
其中 a B3B2 = 2ω2 v B3B2 = 0(∵ v B3B2 = 0)
a B1 ⎛ m / s 2 ⎞ 取 μa = ⎜ ⎟ 作加速度图 p ' b '1 ⎝ mm ⎠
题3-8 c) 解(续2)
[解] (3)加速度分析 a B 2 ( = a B1 ) → a B 3 → a C 3 1) 求aB2 A 1 ω1 2) 求aB3
取
√ v ⎛m/s⎞ μ v = B1 ⎜ ⎟ 作速度图 pb1 ⎝ mm ⎠
3) 求vC3 : 用速度影像法
v C 3 = 0 同时可求得 ω3 =
西工大机械设计第5章PPT

重点
不同材料的性能特点、适用范围 以及加工工艺;材料在机械设计 中的应用及选型原则;材料性能 对机械零件性能的影响。
难点
不同材料间的性能对比与评估; 材料加工工艺的原理与实践;材 料与机械零件性能的关联性分析 。
第5章重点与难点
重点
不同材料的性能特点、适用范围 以及加工工艺;材料在机械设计 中的应用及选型原则;材料性能 对机械零件性能的影响。
优化设计
根据技术设计的结果,对机械 的结构和性能进行优化,以提 高机械的性能和效率。
需求分析
根据使用要求,对机械的功能、 性能、成本等进行分析,确定 设计目标。
技术设计
根据概念设计的结果,进行详 细的结构设计,确定各个零部 件的形状、尺寸、材料等。
制造与试验
根据优化设计的结果,制造出 样机并进行试验,以验证设计 的可行性和有效性。
学习的意义
在现代工业生产中,机械系统广泛应用于各种领域,如制造业、航空航天、交通运输等。掌握机械设计的基本原 理和方法,对于培养机械工程师的工程素养和实际设计能力具有重要意义。同时,这也是进一步学习其他机械工 程学科的基础。
02 机械设计基础
02 机械设计基础
机械设计概述
机械设计定义
机械设计是根据使用要求,对机械的工作原理、结构、运动方式、力和能量的传递方式、 各个零件的材料和形状尺寸、润滑方法等进行构思、分析和计算并将其转化为具体的描述 以作为制造依据的工作过程。
齿轮材料与热处理
讲解了齿轮材料的要求以及常用的 齿轮材料,如铸钢、锻钢、铸铁等, 并介绍了材料的热处理方法以提高 齿轮的力学性能。
齿轮的强度计算
介绍了齿轮的弯曲强度和接触强度 计算方法,以及齿根弯曲疲劳强度 的计算。