基于ADAMS的单缸内燃机曲柄滑块机构建模与仿真.
adams曲柄滑块机构实例仿真

题6-6图为开槽机上用的急回机构。
原动件BC 匀速转动,已知mm a 80=,mm b 200=,mm l AD 100=,mm l DF 400=。
原动件为构件BC ,为匀速转动,角速度2/rad s ωπ=。
对该机构进行运动分析和动力分析。
在本例子中,将展示在ADAMS 中可以先用未组装的形式构造急回机构的各个部件,然后在仿真前让这些部件自动地组装起来,最后进行仿真。
这种方法比较适合构造由较多部件组成的复杂模型。
创建过程⒈启动ADAMS双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。
在欢迎对话框中选择“Create a newmodel ”,在模型名称(Model name )栏中输入:jihuijigou ;在重力名称(Gravity )栏中选择“Earth Normal (-Global Y)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。
如图1-1所示。
图1-1 欢迎对话框题6-6图⒉设置工作环境对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View菜单栏中,选择设置(Setting)下拉菜单中的工作网格(Working Grid)命令。
系统弹出设置工作网格对话框,将网格的尺寸(Size)中的X和Y分别设置成750mm和1000mm,间距(Spacing)中的X和Y都设置成10mm。
然后点击“OK”确定。
如图2-1所表示。
用鼠标左键点击动态放大(Dynamic Zoom)图标,在模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。
用鼠标左键点击动态移动(Dynamic Translate)图标,在模型窗口中,按住鼠标左键,移动鼠标选择合适的网格。
⒊创建机构的各个部件在ADAMS/View零件库中选择连杆(Link)图标,长度为200mm(mmb200),其他参数合理选择。
如图3-1所示。
在ADAMS/View工作窗口中先用鼠标左键选择点(-80,0,0)mm(该点的位置可以选择在其他地方),然后按照和题目中差不多的倾斜角,点击鼠标左键(本题选择点(-200,160,0)mm),创建出主曲柄BC(PART_2)。
adams曲柄滑块机构实例仿真

题6-6图为开槽机上用的急回机构。
原动件BC 匀速转动,已知mm a 80=,mm b 200=,mm l AD 100=,mm l DF 400=。
原动件为构件BC ,为匀速转动,角速度2/rad s ωπ=。
对该机构进行运动分析和动力分析。
在本例子中,将展示在ADAMS 中可以先用未组装的形式构造急回机构的各个部件,然后在仿真前让这些部件自动地组装起来,最后进行仿真。
这种方法比较适合构造由较多部件组成的复杂模型。
创建过程⒈启动ADAMS双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。
在欢迎对话框中选择“Create a new model ”,在模型名称(Model name )栏中输入:jihuijigou ;在重力名称(Gravity )栏中选择“Earth Normal (-Global Y)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。
如图1-1所示。
图1-1 欢迎对话框题6-6图⒉ 设置工作环境2.1 对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网 格(Working Grid )命令。
系统弹出设置工作网格对话框,将网格的尺 寸(Size )中的X 和Y 分别设置成750mm 和1000mm ,间距(Spacing ) 中的X 和Y 都设置成10mm 。
然后点击“OK ”确定。
如图2-1所表示。
2.2用鼠标左键点击动态放大(Dynamic Zoom )图标,在模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。
2.3 用鼠标左键点击动态移动(Dynamic Translate )图标,在模型窗口中,按住鼠标左键,移动鼠标选择合适的网格。
⒊创建机构的各个部件3.1 在ADAMS/View 零件库中选择 连杆(Link )图标,长度为200mm(mm b 200 ),其他参数合理选择。
基于ADAMS的单缸内燃机曲柄连杆机构动力分析 - 副本

293. [5] 闵剑青,徐梓斌,舒建武.铰链六杆机构的动力学分
析系统[J].机械传动,2005,20(2):31-33.
The Dynamic Analysis on the Crank-connecting Rod of Single-cylinder Internal Combustion Engine Base on ADAMS
ADAMS(Automatic Dynamic Analysis of Mechanical System)为 平 台 ,对 单 缸 内 燃 机 的 曲 柄 连 杆 机 构 进 行 了动力学分析的计算机模拟研究,以便提高工作效 率,更好地研究机构在工作过程中的运动规律、机 构运动过程中的惯性力对机体产生的干扰力以及惯 性力的平衡问题。
通过仿真发现:
1) 倾覆力矩 M 最大峰值的绝对值不随曲轴质
心位置和质量变化而变化,无法在内燃机内部获得
平衡,一般仅依靠足够大的安装基础来克服其引起
的振动。
2) 横 向 、 纵 向 干 扰 力 的 峰 值 Fx′max 和 Fy max 随 曲
轴质心位置和质量变化均呈 V 形折线,但对曲轴质
心位置变化更加敏感。
线方向,其值对曲柄连杆机构惯性力没有影响;由
于曲柄臂及平衡块结构的对称性, X 坐标一般近似
为 0,在模拟过程中不予考虑;而 Y 坐标值表述了
曲轴质心偏离曲轴旋转中心线的程度,故在模拟过
程中只考虑 Y 值的变化,令其在-25~10mm 之间变
化 。干 扰 力 FY 和 FX′ 最 大 峰 值 的 绝 对 值 随 曲 轴 质 心 位 置的变化规律如图 3 所示。
adams曲柄滑块机构实例仿真

题6-6图为开槽机上用的急回机构。
原动件BC 匀速转动,已知mm a 80=,mm b 200=,mm l AD 100=,mm l D F 400=。
原动件为构件BC ,为匀速转动,角速度2/rad s ωπ=。
对该机构进行运动分析和动力分析。
在本例子中,将展示在ADAMS 中可以先用未组装的形式构造急回机构的各个部件,然后在仿真前让这些部件自动地组装起来,最后进行仿真。
这种方法比较适合构造由较多部件组成的复杂模型。
创建过程⒈启动ADAMS双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。
在欢迎对话框中选择“Create a newmodel ”,在模型名称(Model name )栏中输入:jihuijigou ;在重力名称(Gravity )栏中选择“Earth Normal (-Global Y)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。
如图1-1所示。
图1-1 欢迎对话框题6-6图⒉ 设置工作环境2.1 对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网 格(Working Grid )命令。
系统弹出设置工作网格对话框,将网格的尺 寸(Size )中的X 和Y 分别设置成750mm 和1000mm ,间距(Spacing ) 中的X 和Y 都设置成10mm 。
然后点击“OK ”确定。
如图2-1所表示。
2.2用鼠标左键点击动态放大(Dynamic Zoom )图标,在模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。
2.3 用鼠标左键点击动态移动(Dynamic Translate )图标,在模型窗口中,按住鼠标左键,移动鼠标选择合适的网格。
⒊创建机构的各个部件3.1 在ADAMS/View 零件库中选择 连杆(Link )图标,长度为200mm(mm b200 ),其他参数合理选择。
基于ADAMS的曲柄滑块压力机构力的仿真分析

北京航空航天大学研究生课程考核记录2013-2014 学年第一学期学号ZY1307307 姓名杨绍宝成绩课程名称:《产品设计与虚拟样机》论文题目:基于ADAMS的曲柄滑块压力机构力的仿真分析任课教师评语:任课教师签字:考核日期:年月日2013-1-5基于ADAMS的曲柄滑块压力机构力的仿真分析ZY1307307 杨绍宝北京航空航天大学机械工程及自动化学院(北京100191)摘要本文主要是对曲柄滑块压力机构进行建立仿真,通过传感器测试施加于滑块上的力,通过这个力控制滑块的运动关键词:ADAMS;曲柄滑块;传感器目录1、曲柄滑块压力机构的设计要求 (3)1) 题目设计要求 (3)2) 求解步骤: (3)2、建立虚拟样机模型: (3)1)设置工作空间和网格 (3)2)创建曲柄滑块模型 (4)3)添加传感器 (12)4)施加运动 (12)3、仿真与测试 ........................... 错误!未定义书签。
1) 仿真模型 (12)2) 模型测试 (12)4、结束语 (13)参考文献: (14)1、曲柄滑块压力机构的设计要求(1)题目设计要求如图1所示为曲柄滑块压力机构简化模型。
已知曲柄长为a=100mm,连杆长度为b=200mm,作用在曲柄上的驱动转矩。
先用弹簧来模拟滑块与被压紧物体之间的力。
设弹簧刚度为K=1N/mm。
为保证被压物体的安全,现需要设置一个力传感器。
当传感器感知到压紧力的值大于或等于70N时,机构就停止运动。
试完成这个力传感器的设计,并通过仿真机构验证其正确性。
图1 曲柄滑块力机构(2)求解步骤:首先创建一个曲柄滑块机构模型以及弹簧,然后通过对曲柄施加运动以及传感器工作,对模型进行仿真。
控制滑块的运动。
2、建立虚拟样机模型:1)设置工作空间和网格根据题目中的数据大小,在建模开始时可以对工作环境进行适当设定,如图2所示:图2工作空间和网格设定2)创建曲柄滑块模型1 创建曲柄曲柄的创建过程是:a 单击Llnk工具按钮,展开选项区;b 选中Length并输入100mm,选中Width输入10mm,选中Depth并输入5mm。
基于ADAMS、UG的曲柄滑块运动仿真及运动特性分析

[] 锡恺, 1 黄 郑文纬. 机械原 理( 9 1 18 年修订版 ) . [ 北京: M】 高等教 育出版
社 .9 . 1 81
械性 能 , 为工程实际提供很好 的参考数 据。
[】 2郑建荣.D MS 虚拟样机技 术入 门与提 高[ . AA 一 M】 北京: 机械工业 出版
(ol eo c ai lE gn ei ,G i o n esy u a g u h u5 0 0 ,hn) C l g fMeh nc nier g u hu U i ri,G i n ,G i o 5 0 3C i e a n z v t y z a
Ab ta t Th i e t r o g iu t r lma h n r — sie - rn c a im t n c a a trsis d r e l e s r c : e ma n s co f a r l a c i e y c u l r c a k me h n s moi h r ce t e v d si r d o i c i d d s l c me t eo i ,a c lr t n o t e t a x r s i n .T r u h e a l s f d t e si e mo e n ft e c a k ip a e n ,v lc t c ee ai fmah mai le p e so s h o g x mp e , n h l v me to h r n y o c i d a ge c a g s i i ee t s u t n p l ai n o a i l t n wh l t e mo e n f t e si e rn ,g n r t n l h n e n a df r n i ai ;a p i t f Ad ms smu ai i h v me to h l r c a k e e ae f t o c o o e d
基于ADMAS的曲柄滑块机构参数化设计与仿真研究
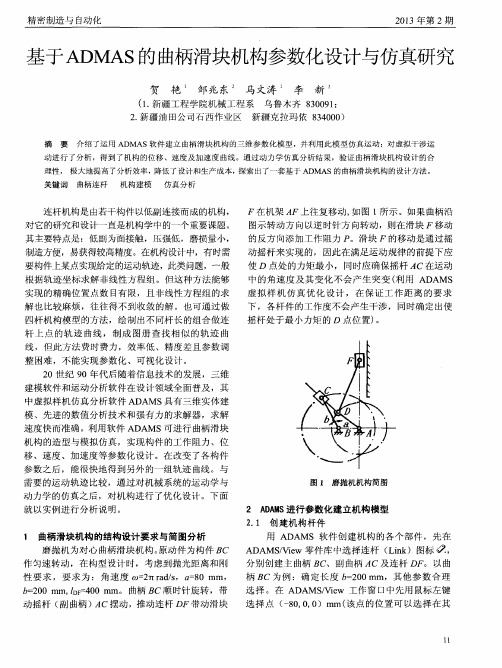
2 A D A M S进 行参 数化 建立 机构 模型
2 . 1 创建机构杆件
1 曲柄滑 块机 构 的结构 设计 要 求 与简 图 分析
作 匀速 转动 ,在 构型 设计 时 ,考 虑 到抛光 距 离和 刚
性 要 求 ,要 求 为 : 角速 度 c o = 2 r t r a d / s ,a = 8 0 mm, b = 2 0 0 mm, I D F = 4 0 0 r n l T l 。 曲柄 B C顺 时针 旋转 ,带
选择 点 ( 一 8 0 , 0 , 0 )mi n ( 该 点 的位 置 可 以选 择 在 其
磨抛机 为对 心 曲柄 滑 块机 构 。 原动件 为构件 B C AD AMS / V i e w 零件 库 中选择 连杆 ( L i n k )图标 ,
动 摇杆 ( 副 曲柄 )A C摆动 ,推动连 杆 D F带动 滑块
介 绍 了运 用 A DMAS软 件 建 立 曲柄 滑 块 机 构 的 三 维 参 数 化 模 型 ,并 利用 此模 型仿 真运 动 ;对 虚 拟 干 涉 运
动进行 了分析,得 到了机构 的位移 、速度及加速度 曲线 。通过动力学仿真分析结果,验证 曲柄滑块机构设计 的合
理 性 , 极 大地 提 高 了分 析 效 率 ,降低 了设计 和 生 产 成本 , 探 索 出 了一 套 基 于 A DMAS的 曲柄 滑 块 机 构 的设 计 方法 。
的压 力 , 生成 的 力一 位 移 曲线 如 图 1 7 所示。 ( 也可选 择测 量机 架对滑 块 的支 持力 ,两力 是一 对作 用力和 反作用 力 ,大小相 等 ,方 向相反 。 )
利用大 型化 造型 , 通 过改变 曲柄滑 块 的一些基本 参数进行
毕业设计(论文)-发动机曲轴连杆机构仿真及有限元分析设计-adams

全套图纸加扣 3012250582曲轴连杆活塞组件虚拟样机的建立学院名称:机械工程学院专业班级:机械设计制造及其自动化0501 班学生姓名:号:学指导教师:2009 年6 月摘要柴油机的气缸、活塞、连杆、曲轴以及主轴承组成一个曲柄连杆机构。
柴油机通过曲柄连杆机构,将活塞的往复运动转换为曲轴的回转运动,使气缸内燃油燃烧所产生的热能转变为曲轴输出的机械功。
可见,曲柄连杆机构是柴油机重要的传力机构。
对其运动和受力情况进行分析和研究,是十分必要的。
这种分析研究既是解决柴油机的平衡、振动和总体设计等课题的基础,也是对其主要零部件在强度、刚度、磨损等方面进行计算和校验时的依据。
本文在曲柄连杆机构理论分析的基础上,利用多体动力学理论,三维造型软件Pro/E 及动力学分析软件ADAMS对内燃机曲柄连杆机构的动力学问题进行了虚拟样机仿真分析。
并以CT484Q柴油机为研究对象,在Pro/E中建立CT484柴油机曲柄连杆机构的虚拟样机模型,导入ADAMS中进行动力学分析,绘制出虚拟样机模型中各连接位置处受力仿真结果曲线。
通过本文的研究,展示了一种简捷、高效的机械设计分析手段,对今后同类型的研究乃至更大规模的仿真分析积累了一些经验。
本文的研究也可以为今后内燃机机构的造型、优化设计提供参考依据。
关键词:内燃机,曲柄连杆机构,ADAMS,虚拟样机,仿真AbstractThe Cylinder, piston, connecting rod, crankshaft and main bearings of diesel engine Compose of a crank-connecting rod mechanism. Through the crank-connecting rod mechanism, Diesel engine convert the piston reciprocating motion to the rotary movement of the crankshaft, and make the cylinder generated by fuel combustion energy into mechanical work output of the crankshaft. This shows that diesel engine crank linkage is an important body for transmission force. It is necessary to analysis and research its movement and force. This analysis is the foundation to solve the balance of diesel engine, vibration and overall design, It is the basis for validate and calculate the strength, stiffness, wear, etc.In this paper, based on the theoretical analysis of crank-connecting rod mechanism, use of multi-body dynamics theory, and use the three-dimensional modeling software, Pro/ E and the dynamic analysis software ADAMS to carry out crank and connecting rod for internal combustion engine body dynamics simulation of a virtual prototype simulation. And study CT484Q Diesel Engine, established linkage of the virtual prototype of diesel engine model In Pro/ E, then do dynamic analysis in ADAMS and draw the connection position of the power curve for the simulation result.Through this paper, the study demonstrated a simple and efficient means of mechanical design and analysis for future research as well as the same type of simulation analysis and accumulate some experience. The study of this paper can provide reference for the modeling and optimal design.Key words: Internal Combustion Engine, Crank-connecting rod mechanism, ADAMS, Virtual Prototyping目录第一章绪论··················································1.1 研究的意义···············································1.2 内燃机曲柄连杆机构的工作特点以及难点·····························1.3 国内外研究及手段···········································1.3.1计算机辅助设计(CAD)·····································1.3.2 多体动力学分析(MBS)···································1.3.3 有限元分析···········································1.3.4优化设计理论··········································1.4 主要研究内容和方法··········································第二章曲柄连杆机构的动力学理论分析·······························2.1 内燃机工作过程分析··········································2.1.1压缩始点气体状态·········································2.1.2压缩终点气体状态········································2.1.3燃烧过程及燃烧终点气体状态·································2.1.4膨胀终点气体状态········································2.2 曲柄连杆机构的运动分析·······································2.3曲柄连杆机构的动力学分析······································2.3.1曲柄连杆机构的质量换算····································2.3.2曲柄连杆机构的惯性力和惯性力矩······························2.3.3曲柄连杆机构的动力学分析··································2.4 内燃机工作过程计算··········································第三章曲轴连杆活塞组件的虚拟样机································3.1Pro/E 系统的建模原理及其特点····································3.1.1参数化设计············································3.1.2 特征建模的基本思想······································3.1.3全相关的单一数据库······································3.2 曲柄、连杆、活塞组件几何模型的建立以及装配··························3.2.1活塞组件的建模·········································3.2.2 连杆组建的建模········································3.2.3曲轴组件的建模·········································3.2.4曲轴连杆活塞组件的总装配···································第四章曲柄连杆机构的运动学和动力学分析·····························4.1ADAMS简介及其基本原理·······································4.1.1 运动学和动力学基本概念···································4.1.2 ADAMS中多刚体动力写方程的建立······························4.2ADAMS 中的运动学和动力学分析···································4.2.1 曲柄连杆机构刚体模型的转化和输入·····························4.2.2 曲轴轴系多刚体动力学仿真分析·······························第五章结论与展望·············································5.1 总结····················································5.2 展望····················································致谢························································参考文献·····················································附录·························································第一章绪论1.1研究的意义内燃机是目前世界上应用最广泛的热动力装置,自1860年法国人设计出第一台煤气发动机以来,内燃机无论是在结构上还是在性能上都较以前有了很大的进步。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图3 曲柄滑块机构建模
5
3、依次在三个连接点上建立转动副约束,并在滑块与机 架之间建立沿水平方向的滑动副,在JIONT_1处添加旋 转约束。则模型基本建立,如下图3所示:
6
图4 曲柄滑块机构模型添加约束
4、为了使得所建立的模型具有更好的柔性,可以 通过改变参数来修改模型,以达到高效最优的设计 目标,我们可以对模型进行参数化设计,即将先前 建立的三个Point点修改为参数化点。
20
图16 解析法得到的活塞位移变化曲线图
21
图17 解析法得到的活塞速度变化曲线图
22
图18 解析法得到的活塞加速度变化曲线图
23
通过以上的曲线图,我们可以看出:通过 解析法得到的活塞X方向的位移、速度和加 速度随时间的变化与使用ADAMS得到的变 化曲线基本一致; 位移在250mm~450mm之间变化;速度处 于±40000mm/s幅度内摆动;加速度大致 在-1.75×10^7~9×10^6之间变化,且在最 大加速度位置有持续性的小幅度的回落。 从而验证了ADAMS建模与运动学仿真的有 效性。
图2 单缸内燃机的曲柄滑块机构
4
一、几何建模
1、启动Adams/View程序,创建一个新的模型,将文件名 改为ENGINE。 2、根据已知单缸内燃机曲柄连杆机构的几何尺寸建立三 个点,然后在这三个点上依次建立曲柄和连杆,分别命 名为Crank、Link,在第三点上用旋转体方式建立滑块 机构Slider。如图3所示:
图9 运动学仿真
11
3、保存仿真分析结果,然后进入后处理窗口界面, 计算处理运动副上的位移、速度、加速度等的数 据。以下分别为滑块Slider的X方向的位移、速度 和加速度的图。
图10 滑块的X方向的位移变化图
12
图11 滑块X方向的速度变化图
13
图12 滑块X方向的加速度变化图
14
连杆Link的角速度和角加速度变化曲线图如下:
2
如右图 为一个内燃 机的详细剖 面图,其基 本机构由一 个曲柄、一 个连杆和一 个活塞(滑 块)组成。
图1 V形8缸发动机剖面图
3
本文研究内容:
单缸内燃机的曲柄滑块机构,如下图2所示,曲柄长度 r=100mm,ω=3400r/min, 连杆长度l=350mm,滑块的长度 是100mm,底面直径为50mm,曲柄和连杆的材料为铸钢, 密度为7800kg/m^3,弹性模量E=202000MPa,泊松比 =0.3,滑块的材料为黄铜,用ADAMS建立几何模型并对其 进行运动学和动力学分析,并将其结果与解析法相比较。
图13 连杆Z方向的角速度变化图
15
图14 连杆Z方向的角加速度变化图
16
曲柄Crank的角速度变化曲线:
图15 曲柄Z方向的角速度变化图
17
4、通过以上的运动学分析可知个构件的位移、速 度及加速度随时间的变化情况,其都在预想的范 围之类,通过解析法我们可做以下比较,由教材 上的分析可得到单缸内燃机的活塞的位移、速度 和加速度的表达式分别为:
修改后的模型如图7:
图6 修改参数化变量
8
9
二、运动学仿真分析
1、由于已知曲柄转 速为3400r/min,即 对应在ADAMS里面 的曲柄的旋转约束 的转速为3400*6d/s, 故修改MOTION_1 的转速如右图8所示:
图8 修改MOTION转速
10
2、开始进行运动学仿真,将仿真类型设为Kinematic, 为了得到2个周期的仿真结果,我们在将End Time设 为2/(3400/60)= 0.035294,步长设为200。 仿真过程如下图9所示:
基于ADAMS的单缸内燃机曲柄滑块机构建模与仿真.
单缸内燃机曲柄滑块机构建模与仿真
Fourbar Slider-Crank Mechanism for SingleCylinder Internal Combustion Engine
安徽工业大学 机械工程 夏洪峰 xiahf521@
r r x l r cost cos2t 4l 4l
2
r r sin t sin 2t x 2l
r r cost cos 2t x l
2
18
将其用MATLAB编程运算,取r=100mm; l=350mm;ω=(3400/60)×2π;为得到其解析 曲线,编写程序如下: t=0:2/(3400/60)/200:2/(3400/60); x=l-r^2/(4*l)+r*(cos(w*t)+(r/(4*l))*cos(2*w*t)); v=-r*w*(sin(w*t)+(r/(2*l))*sin(2*w*t)); a=-r*w^2*(cos(w*t)+(r/l)*cos(2*w*t)); subplot(2,2,1); plot(w*t*180/pi,x,'k'); title('Slider Position mm'); xlabel('Angular(deg)'); ylabel('Length(mm)'); grid on
19
subplot(2,2,2); plot(w*t*180/pi,v,'k'); title('Slider Velocity mm/s'); xlabel('Angular(deg)'); ylabel('Velocity(mm/sec)'); grid on subplot(2,2,3); plot(w*t*180/pi,a,'k'); title('Slider Acceleration mm/s^2'); xlabel('Angular(deg)'); ylabel('Acceleration(mm/sec^2)'); grid on 运算程序可得到其活塞的位移、速度及加 速度曲线分别为:
根据已知条件r=100,l=350,将POINT_2修 改为参数变量DV_1,其它点相应参数化设计如下 图5所示:
Байду номын сангаас
图5 参数化变量设计
7
先前建模时我们 将POINT_2的坐标设 为(60,80),为使 得后一步的运动仿真 的起始角度为0,需 要修改模型,使初始 状态为曲柄在水平位 置,即修改POINT_2 的坐标为(100,0)。 修改过程为将DV_1 由60改为100,如右 图6所示: