第6章线性系统的校正方法《自动控制原理》精品PPT课件
合集下载
自动控制原理与系统第六章 自动控制系统的校正PPT课件
二、比例-微分(PD) 校正(相位超前校正)
在自动控制系统中,一般都包含有惯性环节和 积分环节,它们使信号产生时间上的滞后,使系统 的快速性变差,也使系统的稳定性变差,甚至造成 系统不稳定。这时若在系统的前向通路上串联比例微分校正装置,则可使相位超前,以抵消惯性环节 和积分环节使相位滞后而产生的不良后果。以上面 的例子来说明比例-积分校正对系统性能的影响,图 6-4位具有比例积分校正的系统框图。
二、有源校正装置 有源校正装置是由运放器组成的调节器。表6-2
列出了几种典型的有源校正装置。
有源校正装置本身有增益,且输入阻抗高,输 出阻抗低。它的缺点是线路较复杂,需另外供给电 源(通常需正、负电压源)。
表6-2 几种典型的有源校正装置
第二节 串联校正
•
图6-1 具有比例校正的系统框图
图6-2 比例校正对系统性能的影响
同理应用MATLAB/SIMULINK,只要在系统仿真框 图中将增益的参数改为17.5,既可以得到如图6-3b 所示的单位阶跃响应曲线。
•
•
图6-3 比例校正前、后的单位阶跃响应曲线
•
调节系统的增益,在系统的相对稳定性和稳态 精度之间作某种折衷的选择,以满足(或兼顾)实际 系统的要求,是最常用的调整方法之一。
• (6-7)
结论: 对照系统校正前、后的曲线Ⅰ和曲线Ⅲ ,不难
看出,增设PID 1)在低频段,由于PID调节器积分不分的作用
,系统增加了一阶无静差度,改善了系统的稳态性 能。(使对输入等速信号由有静差变为无静差)
2)在中频段,由于PID调节器微分部分的作用( 进行相位超前校正),使系统的相位裕量增加,
图6-9 比例积分(PI)校正对系统性能的影响
【例6-2】在如图6-7所示的系统中,若固有部分的 传递函数(对应随动系统)为:
自动控制原理控制系统的校正培训课件
由于 :
lg m
1 2
(lg
1 T
lg
1 aT
)
故最大超前角频率wm是两个转折频率1/aT和1/T旳几何中点。
得最大超前角 :
m
arctan a 1 2a
或:
m
arcsin
a a
1 1
由此得:
Lc (m) 20lg aGc j 10lg a
14
2. 无源滞后网络
Z
1
R1;Z2
R2
1 Cs
无源滞后网络旳传递函数为 :
6
6.2 校正装置及其特性
本节简介它们旳电路形式、传递函数、对 数频率特性以及零极点分布图。由于工程实践 中普遍采用PID调整技术,因此本节还对PID 调整器旳原理进行简要简介。
7
6.2.1 无源校正装置
1. 无源超前网络
复阻抗:
Z1
1
R1 R1Cs
Z 2 R2
8
因此超前网络旳传递函数为:
T 1 0.114
m a
30
因此超前网络传递函数可确定为
1 0.456s 4Gc (s) 1 0.114s
为了赔偿无源超前网络产生旳增益衰减,放大器旳增益需要提高4倍,否则 不能保证稳态误差规定。
超前网络参数确定后,已校正系统旳开环传递函数可写为
Gc
(s)G0 (s)
10(1 0.456s) s(1 0.114s)(1
Lo c =Lc m =10 lg a
根据上式可确定超前网络旳参数a。有了wm和a后来,即可由下式求出超前 网络旳另一参数
T 1
m a
26
(4)验算已校正系统旳相角裕度 ;
由于超前网络旳参数是根据满足系统剪切频率规定选择旳,因此相角裕 度与否满足规定,必须验算。验算时,由已知旳a值,根据式
中职教育-《自动控制原理》课件:第6章 线性控制系统的校正方法(4)电子工业出版.ppt
7
• •
zc
n
sin sin(
)(6-37)
• •
pc
n
sin( sin(
c)
c
() 6-38)
•
则
zc pc
sin sin( c ) sin( ) sin( c )
• (6-39)
•由 • •得
d 0 d
1 (
2
c )
8
• 由此,便可根据式(6-37)、式(6-38)和式(6-39)确 定校正装置零、极点位置以及参数和T,即
通过在前向通道上串联一个适当的滞后校正装置 来解决。
12
• 1)为了避免原系统在闭环极点附近的根轨迹有
显著改变,滞后校正装置的相位角应当限制在不 大的角度内(一般限制在50左右),为此应使滞
后校正装置的零、极点尽量靠近在一起,并且使 它们靠近s平面的坐标原点,这样已校正系统的闭
环极点,将从它们的原来位置稍稍离开,因而系 统的瞬态特性将基本上保持不变。
s1,2对应的开环增益
• 设系统的开环传递函数为
m
k(s z j )
GK (s)
j 1 nv
sv (s pi )
i 1
• 则根据幅值条件 | GK (s1) | 1 ,得
nv
•
| s1 |v | s1 pi |
•
k
i 1
m
(6-43)
| s1 z j |
j 1
16
• 原系统的静态误差系数为
•
zc , T 1
•
pc
zc
(6-40)
• (5) 校验系统的性能指标,如果系统不满足要求
指标,适当调整零、极点位置。如果需要大的静 态误差系数,则应采用其它方案。
精品课件-自动控制原理-第六章 系统校正

20lg 10 0.456c cc
0 10 0.456
c
1 c
4.56(rad/s)
=180° (c) Gc ( j)G( j)
180° 90°- arctanc arctan0.456c arctan0.114c | c 4.56 49.8°
(6) 选择无源相位超前网络元件值。(省略)
R2 R1 R2
1 R1Cs 1 R1R2 Cs
R1 R2
Gc
s
1 a
1 aTs 1 Ts
T R1R2 C R1 R2
a R1 R2 1 R1 1
R2
R2
Gc
s
1 aTs 1 Ts
Gc
j
1 1
jaT jT
c () arctan aT arctanT
m
T
1 a
1 2
(lg
1
G1(s)G2 (s)
G1(s)
1 T1s
1 T1s
G2
(s)
1 1
T2 T2
s s
Gc
(
j)
1 jT1 1 jT1
1 jT2 1 jT2
G1( j)G2 ( j)
2.有源相位滞后-超前网络
Gc
(s)
G0
(1 T2s) (1 T1s
(1 T3s) 1 T4s)
式中,
G0
-
R2 R3 R1
【例6-2】 某控制系统的结构如图所示。其中
G1(s)
(0.1s
k 1)(0.001s
1)
要求设计串联校正装置,使系统满足在单位斜坡信号作用下稳
态误差ess≤0.1%及 ≥45º的性能指标。
解:先用图示的无源相位超前网络进行校正。
自动控制原理第六章
G(s)
K0 K p (Ti s 1) Ti s2 (Ts 1)
表明:PI控制器提高系统的型号,可消除控制系统对斜 坡输入信号的稳态误差,改善准确性。
校正前系统闭环特征方程:Ts2+s+K0=0 系统总是稳定的
校正后系统闭环特征方程:TiTs3 Ti s2 K p K0Ti s K p K0 0
调节时间 谐振峰值
ts
3.5
n
Mr
2
1 ,
1 2
0.707
谐振频率 r n 1 2 2 , 0.707
带宽频率 b n 1 2 2 2 4 2 4 4 截止频率 c n 1 4 4 2 2
相角裕度
arctan
低频段:
开环增益充分大, 满足闭环系统的 稳态性能的要求。
中频段:
中频段幅频特性斜 率为 -20dB/dec, 而且有足够的频带 宽度,保证适当的 相角裕度。
高频段:
高频段增益尽 快减小,尽可 能地削弱噪声 的影响。
常用的校正装置设计方法 -均仅适用最小相位系统
1.分析法(试探法)
特点:直观,物理上易于实 现,但要求设计者有一定的 设计经验,设计过程带有试 探性,目前工程上多采用的 方法。
列劳思表:
s3 TiT
K p K0Ti
s2 Ti
K pK0
s1 K p K0 (Ti T )
s0 K p K0
若想使系统稳定,需要Ti>T。如果 Ti 太小,可能造成系 统的不稳定。
5.比例-积分-微分(PID)控制规律
R( s )
E(s)
C(s)
K
p (1
线性系统的校正方法《自动控制原理》
(1) 反向端输入的有源调节器
反向端输入有源调节器的电路如下图:
图中:
是输入阻容网络的等效阻抗,
是反馈阻容网络的等效
阻抗, 传递函数为:
用不同的阻容网络构成
﹑
就可得到不同的调节规律. 可见教材
P.233表6-2典型的有源调节器. (2) 同向端输入的有源调节器 同向端输入有源调节器的电路 如右图:
设
产生一个小偏差
, 则
变为
, 其相对增量为:
, 采用位置反馈后, 变化前的传递系数为
变化后的增量
, 其相对增量为:
2. 复合控制 工程实际中的系统往往受各种干扰的影响, 当控制系统对在 干扰影响的动静态性能提出很高要求时, 单纯用反馈控制一般难 以满足要求, 此时可考虑采用复合控制的手段. 下面简要介绍针 对干扰作用下的复合控制的方法和特点.
4
特性法设计系统, 都是通过闭环系统的开环特性进行的, 用对数
5
频率特性法设计系统, 就需通过闭环系统的开环对数频率特性进
6
行设计. 下面还是通过具体例子加以说明.
7
6-3 串联校正
例1 设单位负反馈系统的开环传递函数为:
若要求系统的速度误差系数KV =20, 相角裕量
,幅
值裕量
, 试设计串联超前校正装置.
解: (1)确定系统的开环放大倍数.并画开环对数幅频特性曲线
2.串联超前校正
分析当K=20时, 原系统是否满足动态要求.
由于超前网络的放大倍数为
态误差系数降低, 故需再串接一放大倍数为
由上计算可知, 原系统当K=20时, 闭环虽稳定, 但相角裕量仅为 18度, 将会有较大的超调, 不满足相角裕量大于等于50度的动态 要求, 可采用串联超前网络给以校正. 设计网络参数超前网络的传递函数为:
中职教育-《自动控制原理》课件:第6章 线性控制系统的校正方法(3)电子工业出版.ppt

GK (s)
G(s)H (s)
K s(0.5s
1)
• 要求系统的稳态速度误差系数Kv=20(1/s), 相位裕量0≥50°,幅值裕量Kg≥10dB,试确 定串联校正装置。
6
7
由图6-16可知,校正后系统的幅值穿越频率 c' 9
rad/s;相位穿越频率 g' ;相位裕量 50 幅值裕量 Kg dB,故系统满足性能指标的要求。
频段决定系统的稳态误差,根据稳态性能指标确
定低频段的斜率和高度;为保证系统具有足够的
稳定裕量(45左右),开环对数频率特性在剪切
频率ωc附近的斜率应为-20dB/dec,而且应具有
足够的中频宽度,以保证在系统参数变化时,相
位裕量变化不大;为抑制高频干扰对系统的影响,
高频段应尽可能迅速衰减。
1
• 6.3.1 频率法的串联超前校正
2
• (1) 根据性能指标对稳态误差系数的要求,确定 开环增益K;
Байду номын сангаас
• (2) 利用确定的开环增益K,画出未校正系统开
环和传幅递 值函 裕数 量GKgK;(s)的Bode图,并求出其相位裕量
• (3) 确定为使相位裕量达到要求值,所需增加的
超前相位角φc,即
•
c 0
(6-19)
• 式装中置, 影响0为剪要切求频的率相的位位裕置量而;附加是的因相为位考裕虑量到,校当正
6-3 频率法串联校正
•
在设计、分析控制系统时,最常用的方法是
频率法。应用频率法对系统进行校正,其目的是
改变频率特性的形状,使校正后的系统频率特性 具有合适的低频、中频和高频特性以及足够的稳 定裕量,从而满足所要求的性能指标。
自动控制原理课件之第六章线性系统的校正方法
1. 常用时域性能指标(主要对阶跃响应定义) 超调量、调节时间、上升时间、无差度、稳态 误差或开环增益等。
编辑ppt
7
2. 常用的频域指标 闭环频域指标:峰值比Mr /M0、峰值频率、带宽 开环频域指标:剪切频率、稳定裕度
3. 常用的复数域指标 通常以系统闭环极点在复平面的分布区域来定义。
可采用某种组合。
编辑ppt
14
三、校正设计的方法
1. 频率法 基本思想:利用适当校正装置的Bode图,配合 开环增益调整来修改原来开环系统Bode图,使 得开环系统经校正和增益调整后的Bode图符合 性能指标要求。
原开环Bode图+校正环节Bode图+增益调 整=校正后的开环Bode图
编辑ppt
➢ 一个具体系统对指标的要求应有所侧重 调速系统对平稳性和稳态精度要求严格; 随动系统对快速性期望很高。
➢ 性能指标的提出要有依据,不能脱离实际 负载能力的约束; 能源功率的约束等。
编辑ppt
10
二、几种校正方式
➢ 根据校正装置加入系统的方式和所起的作用不同, 可将其作如下分类:
R(s) +
η
θ
编辑ppt
8
几点说明: ➢ 上述这些性能指标之间有一定的换算关系,但有时
很复杂。 ➢ 动态性能各指标之间对系统的参数与结构的要求往
往存在矛盾。 稳态误差与稳定性对系统开环增益、积分环节
数目的要求; 系统快速性与抑制噪声能力对带宽的要求。
编辑ppt
9
➢ 性能指标通常由控制系统的使用单位或被控对象的 制造单位提出。
4. 校正的实质 ➢ 通过改变系统的零极点来改变系统性能。
编辑ppt
5
5.校正装置的实现 通常是参数易于调整的专用装置(模电或数电装 置) 校正方式多样化:串联校正、反馈校正、前馈补 偿等 注意:校正方案不唯一
编辑ppt
7
2. 常用的频域指标 闭环频域指标:峰值比Mr /M0、峰值频率、带宽 开环频域指标:剪切频率、稳定裕度
3. 常用的复数域指标 通常以系统闭环极点在复平面的分布区域来定义。
可采用某种组合。
编辑ppt
14
三、校正设计的方法
1. 频率法 基本思想:利用适当校正装置的Bode图,配合 开环增益调整来修改原来开环系统Bode图,使 得开环系统经校正和增益调整后的Bode图符合 性能指标要求。
原开环Bode图+校正环节Bode图+增益调 整=校正后的开环Bode图
编辑ppt
➢ 一个具体系统对指标的要求应有所侧重 调速系统对平稳性和稳态精度要求严格; 随动系统对快速性期望很高。
➢ 性能指标的提出要有依据,不能脱离实际 负载能力的约束; 能源功率的约束等。
编辑ppt
10
二、几种校正方式
➢ 根据校正装置加入系统的方式和所起的作用不同, 可将其作如下分类:
R(s) +
η
θ
编辑ppt
8
几点说明: ➢ 上述这些性能指标之间有一定的换算关系,但有时
很复杂。 ➢ 动态性能各指标之间对系统的参数与结构的要求往
往存在矛盾。 稳态误差与稳定性对系统开环增益、积分环节
数目的要求; 系统快速性与抑制噪声能力对带宽的要求。
编辑ppt
9
➢ 性能指标通常由控制系统的使用单位或被控对象的 制造单位提出。
4. 校正的实质 ➢ 通过改变系统的零极点来改变系统性能。
编辑ppt
5
5.校正装置的实现 通常是参数易于调整的专用装置(模电或数电装 置) 校正方式多样化:串联校正、反馈校正、前馈补 偿等 注意:校正方案不唯一
《自动控制原理》第6章 线性系统的校正方法

u(t)
=
K
p
(e(t )
+
1 Ti
t
0 e(t)dt + Td
de(t) ) dt
24
自动控制原理(I)
第六章 线性系统的校正方法
一、(比例)P控制 u(t) = K pe(t) Gc (s) = K p • 校正后系统的开环传递函数:K pGo (s)
• 功能:调整系统的开环增益
R(s) E(s) Kp
自动控制原理(I)
第六章 线性系统的校正方法
一、系统设计依据: 稳、准、快
稳态指标:稳态误差ess、 K、系统型 动态指标: 时域: tr、 σ%、 ts 频域: ωc 、
相对稳定性:幅值裕度h、相角裕度
自动控制原理(I)
第六章 线性系统的校正方法
二、校正方式: 串联校正
反馈校正 前馈校正 复合校正
三、(微分)D控制 Gc (s) = Td s
注:不单独用 D控制器
28
自动控制原理(I)
第六章 线性系统的校正方法
四、PD控制
Td :微分作用超
1. 传递函数:Gc (s) = K p (1+ Td s)
前于比例作用的时 间间隔。
R(s) E(s) K p (1+ Td s)
C(s) G(s)
H(s)
-
Gc (s)
自动控制原理(I)
第六章 线性系统的校正方法
闭环系统(原)
R(s)
E(s)
Go (s)
C(s)
−−
Gc (s)
H (s)
自动控制原理(I)
第六章 线性系统的校正方法
闭环系统(校正后)
R(s)
第六章 线性系统的校正方法PPT课件
为为 改善改 系善 统性系能统性能
输入量
补 串串 偿 联 联 元件 补偿
输 输出出 量量 放大 大 元件 元件 执 执行行 元件 元件 被 被控控 对象 对象
主反馈
局 局部部 反馈 反馈 反 补反 偿 馈馈 元补 件偿 测 测量 量 元件 元件
所谓校正,就是在系统中加入一些其参数可以根据需要而改变
的机构或装置,使系统整个特性发生变化,从而满足给定的各项性
M r
1
sin
0 . 1 0 . 4 6 ( M r 1 )1 M r 1 . 8
tK s 2 K c1 . 5 ( M r 1 ) 2 . 5 ( M r 1 ) 21 M r 1 . 8
精选课件
5
系统带宽的选择
dB L ( )
( j )
( j0) 0
3
0 .707 ( j 0 ) 3
时,对信号衰减作用为 20lgb,b越小这种衰减作用越强。
b. 同超前网络,最大滞后角,发生在 1 与 1 几何中心 ,称为最大
滞后角频率,计算公式为
T bT
m
1 Tb
m
arcs1inb 1b
c. 采用无源滞后网络进行串联校正时,主要利用其高频幅值衰减的 特性,以降低系统的开环截止频率,提高系统的相角裕度。
1. 低频段的增益满足稳态精度的要求;
2. 中频段的幅频特性的斜率为-20dB/dec,并具有较宽的频带,这 一要求是为了系统具有满意的动态性能;
3. 高频段要求幅值迅速衰减,以较少噪声的影响。
用频率法对系统进行超前校正的基本原理,是利用超前校正网 络的相位超前特性来增大系统的相位裕度,以达到改善系统瞬态响 应的目点。为此,要求校正网络最大的相位超前角出现在系统的截 止频率(剪切频率)处。
输入量
补 串串 偿 联 联 元件 补偿
输 输出出 量量 放大 大 元件 元件 执 执行行 元件 元件 被 被控控 对象 对象
主反馈
局 局部部 反馈 反馈 反 补反 偿 馈馈 元补 件偿 测 测量 量 元件 元件
所谓校正,就是在系统中加入一些其参数可以根据需要而改变
的机构或装置,使系统整个特性发生变化,从而满足给定的各项性
M r
1
sin
0 . 1 0 . 4 6 ( M r 1 )1 M r 1 . 8
tK s 2 K c1 . 5 ( M r 1 ) 2 . 5 ( M r 1 ) 21 M r 1 . 8
精选课件
5
系统带宽的选择
dB L ( )
( j )
( j0) 0
3
0 .707 ( j 0 ) 3
时,对信号衰减作用为 20lgb,b越小这种衰减作用越强。
b. 同超前网络,最大滞后角,发生在 1 与 1 几何中心 ,称为最大
滞后角频率,计算公式为
T bT
m
1 Tb
m
arcs1inb 1b
c. 采用无源滞后网络进行串联校正时,主要利用其高频幅值衰减的 特性,以降低系统的开环截止频率,提高系统的相角裕度。
1. 低频段的增益满足稳态精度的要求;
2. 中频段的幅频特性的斜率为-20dB/dec,并具有较宽的频带,这 一要求是为了系统具有满意的动态性能;
3. 高频段要求幅值迅速衰减,以较少噪声的影响。
用频率法对系统进行超前校正的基本原理,是利用超前校正网 络的相位超前特性来增大系统的相位裕度,以达到改善系统瞬态响 应的目点。为此,要求校正网络最大的相位超前角出现在系统的截 止频率(剪切频率)处。
自动控制原理第六章线性系统的校正方法

5 • 20 •c • 6 •c 1 c •1• • 200 •cc
c 3rad s
230
验算指标(相角裕度) c 2.1rad s
(20j 1)(6j 1) • 5
1
(200j 1)(0.3j 1)j(j 1)(0.25j 1)
180 0+(c)
(2)画出未校正系统的伯德图,计算未校正系统的
相角裕度和截止频率。
(3)根据设计要求,确定期望相角裕度和截止频率。
Mr
1
sin
,
350 900
超调量 0.16 0.4(Mr 1), 1 Mr 1.8
调节时间
ts
K c
K 2 1.5(M r 1) 2.5(M r 1)2
超调量 0.3 0.16 0.4( 1 1) , 1 1.35 460
装置:
(1)
Kv
70
1 s
(2)
ts 0.1S
(3) % 30%
解(1) 根据I型系统和速度误差系统要求取:K=70
G( j)
70
j(0.12 j 1)(0.02 j 1)
70
exp j 90 tg-10.12 tg-10.02
(0.12)2 1 (0.02)2 1
(2)绘制未校正系统的伯德图,如图红线所示。由图可知
1
2
1 10
1.35 1.35
= 1
1 2.6
,
2=2
rad s
1 1 1.35 = 1 ,
3 10 1.35 1 17.4
3
20
ra
d s
L( )dB
60
40 20 0 0.1 -20
-20
LLc () -40
第六章线性控制系统的设计与校正ppt课件

静态校正装置:
k ( s z ) c c G ( s ) ( 0 p z , p Байду номын сангаас 0) c c c c c ( s p ) c
需要确定的参数为:零极点坐标、根轨迹增益(开环增益)
动态校正的思路及参数计算
解题思路及步骤
根据设计要求选择主导极点位置; 取校正装置 Gc(s)=kc 绘制根轨迹;
s2 j 2
2 校验:校正后的特 程 征 为 方 s 4 s 8 0, 特 征 根 为 s 2 j 2。 1,2
低阶系统单零点希望特性法校正思路简介
由希望极点得希望特征方程;
选择校正装置,得校正后系统特征方程; 联立求待定参数的取值。
零极点校正
kc( s zc ) 设校正装置为:G ( s ) c (s pc ) 系统开环传递函数为: G G ( s) c( s ) 0 2k zc) c( s 1 s( s 2 ) ( spc)
确定主导极点不在根轨迹上,且在根轨迹左侧;
选择校正装置形式并计算校正装置的参数
方法一:校正装置增加零点由相位条件确定零极点坐标zc; 方法二:校正装置增加零极点由相位条件确定零极点坐标zc,pc。 由幅值条件计算kc
检验校正后的系统性能
1 2 受控对象传递函数:G (s ) 0 s (0. 1) 5s s (s 2)
设计与校正的基本方法
根轨迹校正法 频域校正法
第二节 根轨迹校正法
根轨迹校正法的理论依据 时域指标与闭环主导极点位置的关系
校正装置的形式
根轨迹动态校正法的思路及其校正装置参数的计算 根轨迹静态校正法的思路及其校正装置参数的计算
根轨迹校正法的理论依据
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二是并联校正, 如下图所示:
R(s)
GP1(s)
GP2 (s)
Y (s)
GC1(s)
GC2(s)
校正装置GC (s)与系统的某个或某几个环节反向并接, 构成局 部反馈, 称为并联校正.
在介绍校正的方法前, 先介绍常用校正装置的一些特性.
1. 无源校正网络 一般用阻容四端网络构成无源校正网络. (1)无源超前网络(相位超前网络) 其电路如下图所示:
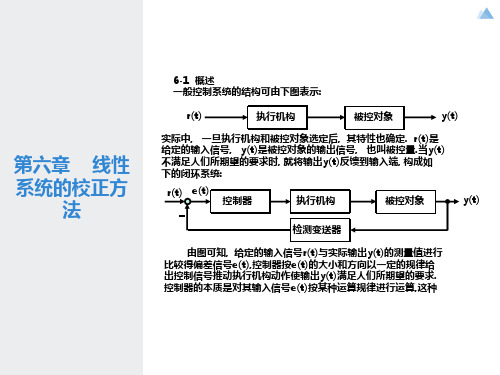
运算规律也叫控制规律. 本章的内容仅涉及如何设计控制规律以பைடு நூலகம்满足人们对控制系统的性能要求.
6-2 输出反馈系统的校正方式与常用校正装置的特性
输出反馈系统的校正方式基本分为两类, 一是串联校正,如下
图所示: R(s)
GC (s)
GP (s)
Y (s)
校正装置 GC (s)与系统的广义对象GP(s)串接在前向通道的校 正方式叫串联校正.
的能力越差,分度系数 的值一般不大于20.
(2)无源滞后网络(相位滞后网络)
滞后网络的电路图,零﹑极点在s平面上的位置及对数幅频
和相频特性曲线见下图:
u1
R1 R2
u2
C
L() db
1
1
1
T
0
bT
bT
2d 0/bd ec
20lgb
j
()
m
1
1 0
0 90
m
bT
T
网络传递函数为:
GC
(s)
U2(s) U1(s)
C
u1
R1
R2
u2
其传递函数为:
GC
(s)
U2(s) U1(s)
1
Ts1
Ts1
s 1
T
s 1
(1)
T
R1 R2 1
R2
T R1R2 C R1 R2
其零﹑极点在s平面上的位置及对数幅频和相频特性曲线见下图:
L() db1
1
1
0 T
T
T
j
20 lg 1
10lg1(/)
1
1 0 ()
20db/dec
开环幅值穿越频率(即截止频率)的十分之一. 滞后网络在校正后
系统开环幅值穿越频率处的滞后相角约等于 tg1[0.1(b1)]
(3) 滞后—超前网络(相位滞后—超前网络)
滞后—超前网络的电路图,零﹑极点在s平面上的位置及对数
幅频和相频特性曲线见下图:
C1
L() db 1
1
T2
T 2 T1
u1
R1 R2
bTs1 Ts1
b
s 1 bT
s 1
T
(2)
b R2 1 R1 R2
T (R1 R2)C
滞后网络的特点: (1) 零点在极点的左边; (2) 网络的稳态
增益等于1,故对输入信号具有低通滤波作用; (3)从幅频曲线上看,
有一段直线的斜率为负20分贝十倍频程, 所以滞后网络对高频信
号或噪声有较强的抑制作用; (4) 网络的最大滞后相角 m 发生在
下的闭环系统:
r(t) e(t) 控制器
执行机构
被控对象
y(t)
检测变送器
由图可知, 给定的输入信号r(t)与实际输出y(t)的测量值进行 比较得偏差信号e(t),控制器按e(t)的大小和方向以一定的规律给 出控制信号推动执行机构动作使输出y(t)满足人们所期望的要求. 控制器的本质是对其输入信号e(t)按某种运算规律进行运算,这种
(3) 用跟随器和阻容网络构成的有源调节器
其电路如下图:
其传递函数为:
u1
Z1
u 2 GC(s)U U1 2((ss))Z1(sZ)2(sZ)2(s)
Z2
6-3 串联校正
1.频率响应法校正设计 当工程上给出的系统性能指标为频域特征参数如相角裕量﹑ 幅值穿越频率﹑稳态误差系数等时, 则采用对数频率特性法校正. 须指出的是, 不管是用根轨迹法设计系统, 还是用对数频率 特性法设计系统, 都是通过闭环系统的开环特性进行的, 用对数 频率特性法设计系统, 就需通过闭环系统的开环对数频率特性进 行设计. 下面还是通过具体例子加以说明.
T
T
90
m
0
m
超前网络的特点: (1) 零点在极点的右边; (2) 网络的稳态增
益小于1,故对输入信号具有衰减作用; (3)从幅频曲线上看,有一段
直线的斜率为正20分贝十倍频程, 所以超前网络具有微分作用;
(4)
网络的最大超前相角 m发生在 m
1
T 处,
且m
sin1
1 1
显然, 越大, m也越大, 微分作用也越强, 但网络克服干扰信号
阻抗, 传递函数为: GC(s)U U12((ss))ZZ12((ss))
用不同的阻容网络构成 Z 1﹑Z 2 就可得到不同的调节规律. 可见教材
P.233表6-2典型的有源调节器.
(2) 同向端输入的有源调节器
Z2
同向端输入有源调节器的电路 如右图:
Z1
u1
u2
其传递函数为: GC(s)U U12((ss))1ZZ12((ss))
m
1 bT
处,
且
m
sin1
b1 b1
显然,
b越大,
m也越大,
即相角
滞后得越利害. 使用滞后网络对系统进行校正, 应力求避免使滞
后网络的最大滞后相角发生在校正后系统开环幅值穿越频率(即
截止频率)附近, 引起相角裕度的减小, 使系统动态性能变坏. 因
此在确定滞后网络的参数时, 一般要求1/bT小于校正后系统
T1),
1
其它常用无源校正网络见教材P.231~P.232表6-1
2. 有源调节器
无源校正网络有以下几个不足之处:
(1) 稳态增益小于等于1; (2) 级间联接必须考虑负载效应;
(3) 当所需校正功能较为复杂时, 网络的计算和参数调整很不方
(4) 便. 由于上述不足, 实际中常用阻容电路和线性集成运放的 组合
u2
0
2d0/bdec
C2
()
1
T1
20db/dec
90
j
1 1 T1 T1 T2
1 0
0 90
T2
领先 滞后
网络传递函数为: GC(s)U U1 2((ss))( (T T11ss 1 1))T (T (22ss 1)1)
(3)
式(3)中:
T1
R1C1,
T2
R2C2
R1C2
1 (T2
第六章 线性系统的校正方法
6-1 概述 一般控制系统的结构可由下图表示:
r(t)
执行机构
被控对象
y(t)
实际中, 一旦执行机构和被控对象选定后, 其特性也确定. r(t)是
给定的输入信号, y(t)是被控对象的输出信号, 也叫被控量.当y(t)
不满足人们所期望的要求时, 就将输出y(t)反馈到输入端, 构成如
(5) 构成校正装置, 这种装置叫调节器. 例如工业上常用的PID 调节
(6) 器. 现仅对有源调节器的基本原理作一简单介绍.
(7)
在下面的介绍中, 为讨论问题方便起见, 均认为运算放
大器
(1) 反向端输入的有源调节器
反向端输入有源调节器的电路如下图:
Z2
u1
Z1
u2
R0
图中: Z 1 是输入阻容网络的等效阻抗, Z 2 是反馈阻容网络的等效