扁鹊飞救系统与ZOLLM系列多参连接
排队系统连接电视操作流程clul

连接WIFI,排队系统和 电视宝需要在同一个网 络下
12
WIFI连接成功
13
点击进入华为秘 盒主页界面
14
进入华为秘盒主页界面显示效果
15
遥控器一直下翻,出现 设置选项菜单
16
这里也可以设置 WIFI连接
设置中的选项
17
应用中的选项
18ቤተ መጻሕፍቲ ባይዱ
19
点击【本地存储】进入
20
选择我们USB1也就 我们的U盘
华为秘盒 蓝牙遥控 器
华为秘盒
电池
电源线
1
HDMI高清输出接口
2
电源接口
3
SD卡插槽
4
电源线
5
HDMI高清数据线
6
华为秘盒插上电源线
7
高清数据线插 上华为秘盒的 HDMI高清输出 接口(Output)
8
HDMI高清线
U盘
9
此端插头插 到【电视端 的HDMI高清 输入接口】
10
遥控器蓝牙配 对方法:【音 量+】键和 【OK键】同时 长按
我们的美团排 还没打开 30
注:排队机连接WIFI必须和华 同WIFI下
31
打开美团排队系统
注:没有开通电视宝的商家需要打 电话给【400 066 5150】给客服, 她们帮忙开通。
32
美团排队取个号
33
新版本显示效果
34
旧版本的显示效果
35
21
找到我们下载 的【电视宝】 点击【安装】
22
选择【总
23
选择【确定
24
选择【安装
25
【打开】 可以进入 电视宝界 面
26
迈普VoIP协同通信产品系列产品介绍

90~250V 50~60Hz 50W
90~250V 50~60Hz < 18W
定购信息
产品型号 MyPower VG M6000 系列 MyPower VG M6500 MyPower VG M6000 VM6000-4E1MPUH VM6000-2E1MPUH VM6000-MPUH VM6000-IWFH VM-32FXSH VM-16S16OH VM-1DSP VM-2DSP VM-1DSPA PCR01-48/20 VM6500-FANH AD150-1S007W1 DD150-5S007J1 MyPower VG2000
全模块化的设计 迈普专有“全模块化”硬件设计,所有产品业务端口类别、端口数量和处理能力都可配置,支持用 户根据现有网络结构和建设需求按需定制 IP 电话系统,保护现有投资,降低建设和升级成本。
PSTN 的可靠性 迈普专有聪明路由技术,能够动态地为当前呼叫选择最佳路径,即使在 IP 网络阻塞和单点设备故 障等异常情况下,也能够为用户提供高品质的通话、传真和增值应用体验,提供与 PSTN 媲美的可靠性。
丰富的增值功能 支持 PSTN 附加业务和特色增值业务,极大地提供客户的办公效率,提升 VoIP 系统价值: 电话会议 群组振铃 强打强拆 呼叫代答 IP 电话伴侣业务 电话用户配置 来电显示、识别 呼叫转接 呼叫转移(遇忙转移、无应答转移、无条件转移) 呼叫等待 热线拨号 忙音自动识别 二次拨号 IVR 录音
ITU-T G.703 (1999)
CAS: Analog CO Trunk、 中国一号
Analog CO Trunk
OMRON编码器说明书
᪡㆛
Ⳍֵ݇ᙃ
串行传送
对应同时输出多位数据的通常并联传送,可采用由一个 传送线进行系列化输出数据的形式,目的是节省连线, 在接受信号侧则变换成并联信号后使用。
⬉ܝӴᛳ఼
ԡ鼠Ӵᛳ఼
⌟䭓Ӵᛳ఼
㾚㾝Ӵᛳ఼ ᅝܼऎඳ Ӵᛳ఼ 䖥Ӵᛳ఼ ᖂൟ⬉ܝ Ӵᛳ఼ ᮟ䕀ᓣ 㓪ⷕ఼ 䍙ໄ⊶ Ӵᛳ఼ य़Ӵᛳ఼
1 增量式或绝对式
考虑到容许的成本,电源接通时的原点可否恢复、控 制速度、耐干扰性等,选择合适的类型。
2 分解率精度的选择
在考虑组装机械装置的要求精度和机械的成本的基础 上,选择最适合的产品。一般选择机械综合精度的1/2 ~1/4精度的分辨率。
3 外形尺寸
选定时还要考虑安装空间与选定轴的形态 (中空轴、 杆轴类)。
18位置,则代码的范围为从14位置到49位置。从49 ᡔᴃᣛफ
位置切换到14位置时,只改变1位,可见保持了格雷
码的性质。通过将该代码转换至14位置,就能转换
至从0位置开始的代码,然后进行使用。
(4) BCD代码
ᡔᴃ㆛
二进10进制代码 (Binary Coded Decimal Code)。
是分别用2进符号表示10进制各位的代码。
Ӵᛳ఼ 䖥Ӵᛳ఼
ᖂൟ⬉ܝ Ӵᛳ఼ ᮟ䕀ᓣ 㓪ⷕ఼ 䍙ໄ⊶ Ӵᛳ఼
य़Ӵᛳ఼
项目
特长
构造
输出波形
·本 型 号 能 根 据 轴 的 旋 转 位 移 量,
输出脉冲列。
其方式是通过其他计数器,计算输
ফܗܝӊ AⳌ⣁㓱 BⳌ⣁㓱
出脉冲数,通过计数检测旋转量。
·希望知道某输入轴位置的旋转量, 先按基准位置,使计数位的计数 值复位,然后再用计数器把由该 䕈 位置发出的脉冲数累加起来。
T_CHEAA 0001.1-2020《智能家电云云互联互通 第1部分:基本模型和技术要求》(公开版

Dell PowerConnect M8024-k 交换机入门指南说明书

Contents
3
4 Starting and Configuring the Switch . . . 10
Regulatory Model PCM8024-k
March 2011 P/N 7XG64 Rev. A00
Contents
1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . 5
PowerConnect M8024-k Overview . . . . . . . . . . . . 5
Expansion Slot
The 10G expansion slot supports the following modules: • SFP+ (four ports) • CX-4 (three ports) • 10GBASE-T (two ports) The modules are sold separately.
Regulatory Model: PCM8024-k
Dell PowerConnect M8024-k Switch
Getting Started Guide
Regulatory Model: PCM8024-k
Notes
NOTE: A NOTE indicates important information that helps you make better use of your computer.
玛珂PM32控制系统

pm31型液压支架电液控制系统用户技术手册(工作面电控部分用户:CHIN33)北京天地玛珂电液控制系统有限公司2006年9月目录前言 (1)1 pm31电液控制系统配置和联接 (1)2 pm31电液控制系统的设备和装置 (4)3 pm31电液控制系统的主要功能概述 (9)4 pm32支架控制器 (11)5 支架控制器应用程序菜单 (17)6 有关传感器测量的菜单显示及操作 (24)7 控制器菜单“错误信息(ERROR MESSAGES)”列的项目说明 (24)8 参数及其输入 (27)9 功能的允许/禁止设定 (29)10 控制器菜单“服务(SERVICE)”列的项目说明 (30)11 支架的单架单动作的非自动控制 (32)12 邻架的自动顺序联动(ASQ)控制 (33)13 支架的成组自动控制 (34)14 闭锁及紧急停止操作 (39)15 系统状态的显示信息 (40)16 应用程序的互传及引导程序(Booter)介绍 (41)17 工作面支架电液控制安全规则 (45)前言pm31支架电液控制系统可用于各种型式液压支架的控制和操作。
支架的型式、结构和控制要求不同,配套的pm31控制系统的配置和软件也随之变化。
本手册提供了pm31电液控制系统及其部件的有关技术资料,重点介绍性能和使用操作方法。
本手册适用的用户为神东矿区,控制对象为该矿区使用的高度为1.7m-3.5m的二柱掩护式大采高液压支架(用户代号chin33)。
1 pm31电液控制系统配置和联接图1.1及图1.2展示了应用于该用户工作面的pm31电液控制系统的配置状况和联接关系。
从图中可以了解系统的全貌:由哪些设备和装置构成,它们的分布以及如何联接成系统。
图1.1表示的是全工作面的整个系统主干,每个支架装备一台支架控制器,控制器之间按顺序互联成网,还配备联接了其他一些不可缺少的设备部件,形成完善的系统。
图1.2表示的是在一个支架之内以支架控制器为核心,包括其输入输出外围设备的单架系统,每个单架系统组合到图 1.1中就是一套全工作面完整的电液控制系统。
小鸟科技多屏幕拼接器产品说明书 v4.0..

多屏幕拼接控制器与分割器说明书重要提示:为了您和设备的安全,请您务必在使用本设备前仔细阅读本安全说明。
如果在使用过程中遇到疑问,请首先阅读本说明书。
正文中有设备操作的详细描述,如仍有疑问,请联系我们,我们将尽快给您满意的答复。
本说明书如有版本变动,恕不另行通知,请谅解。
本公司保留该产品所有权利!目录第一章安全说明 (4)1.1 电源 (4)1.2 断电 (4)1.3 线缆 (4)1.4 信号 (4)1.5 散热 (4)1.6 环境 (4)1.7 维修 (4)1.8 设备安装 (4)1.9 安全注意事项 (4)第二章概述 (6)2.1 多屏幕拼接控制器 (6)2.2 系统拓扑图 (8)第三章安装说明 (9)3.1 打开包装 (9)3.2 安装机器 (9)3.3 机器调试 (9)第四章技术规格 (10)第五章功能介绍 (12)第六章控制软件的基本操作 (13)6.1 基本参数的设置 (13)6.2 新窗口的建立 (17)6.3 窗口的移动和调整 (17)6.4 窗口的关闭 (18)6.5 切换和调整窗口的信号源 (18)6.6 窗口之间的层次关系 (20)6.7 场景的保存与调用 (20)6.8 矩阵联控 (21)6.9 大屏控制 (21)6.10 像素补偿功能 (22)6.11 解除时间限制 (23)第一章安全说明1.1电源请使用带保护地的单相三线制的220V交流电源,并确保整个工程系统使用同接地,不能使用无接地保护的电源,电源线的接地脚不能破坏。
1.2断电在进行设备移动或其它需要断电的情况时,要关闭电源,确保设备安全。
1.3线缆不容许在电源线、信号线、通讯线等线缆上压放物品,应避免对线缆踩踏和挤压,以防止出现漏电和短路等危险情况的发生。
1.4信号确保信号线、通讯线等线材连接好,再开机操作。
1.5散热设备表面的散热孔,不要堵塞,以免热量聚集,损坏设备。
1.6环境设备工作环境要注意防尘,防潮,防止液体浸泡。
LED-580F系列使用说明书V1.1(中文)
SIMATIC S7-1500 ET 200MP 自动化系统 系统手册说明书

SIMATICS7-1500/ET 200MP 自动化系统系统手册01/2023A5E03461186-AKSiemens AG Digital Industries Postfach 48 48 90026 NÜRNBERG 德国Ⓟ 02/2023 本公司保留更改的权利Copyright © Siemens AG 2013 - 2023.保留所有权利法律资讯警告提示系统为了您的人身安全以及避免财产损失,必须注意本手册中的提示。
人身安全的提示用一个警告三角表示,仅与财产损失有关的提示不带警告三角。
警告提示根据危险等级由高到低如下表示。
危险表示如果不采取相应的小心措施,将会导致死亡或者严重的人身伤害。
警告表示如果不采取相应的小心措施,可能导致死亡或者严重的人身伤害。
小心表示如果不采取相应的小心措施,可能导致轻微的人身伤害。
注意表示如果不采取相应的小心措施,可能导致财产损失。
当出现多个危险等级的情况下,每次总是使用最高等级的警告提示。
如果在某个警告提示中带有警告可能导致人身伤害的警告三角,则可能在该警告提示中另外还附带有可能导致财产损失的警告。
合格的专业人员本文件所属的产品/系统只允许由符合各项工作要求的合格人员进行操作。
其操作必须遵照各自附带的文件说明,特别是其中的安全及警告提示。
由于具备相关培训及经验,合格人员可以察觉本产品/系统的风险,并避免可能的危险。
按规定使用 Siemens 产品请注意下列说明:警告Siemens 产品只允许用于目录和相关技术文件中规定的使用情况。
如果要使用其他公司的产品和组件,必须得到 Siemens 推荐和允许。
正确的运输、储存、组装、装配、安装、调试、操作和维护是产品安全、正常运行的前提。
必须保证允许的环境条件。
必须注意相关文件中的提示。
商标所有带有标记符号 ® 的都是 Siemens AG 的注册商标。
本印刷品中的其他符号可能是一些其他商标。
PROFIBUSDP通讯故障诊断方法
S7-1200做DP Master通讯时,DP slave丢失后,CPU不会停机,也不需要向CPU下载组织块。
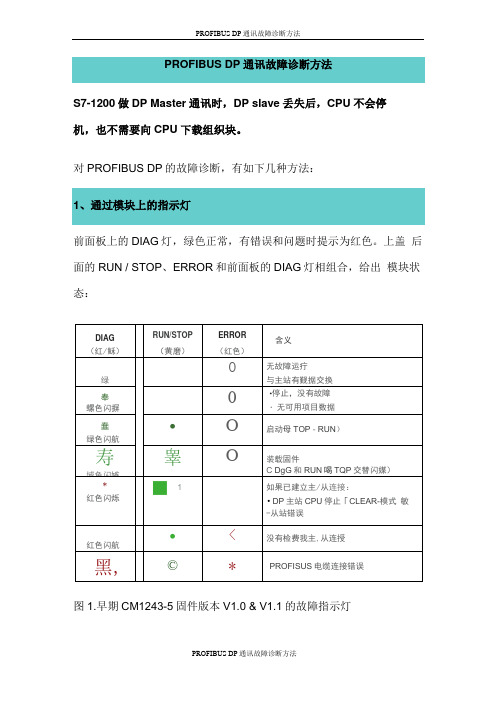
对PROFIBUS DP的故障诊断,有如下几种方法:前面板上的DIAG灯,绿色正常,有错误和问题时提示为红色。
上盖后面的RUN / STOP、ERROR和前面板的DIAG灯相组合,给出模块状态:图1.早期CM1243-5固件版本V1.0 & V1.1的故障指示灯PROFIBUS DP通讯故障诊断方法图2. CM1243-5固件版本V1.2 & V1.3的故障指示灯早期CM1243-5固件版本V1.0 & V1.1在STEP 7 V11中查看CPU诊断缓冲区中的条目。
PROFIBUS DP通讯故障诊断方法*S/ t/Oti IW 11/14t I^D^bCl碗fi 缨中区 ____________________________________________________________________________事件q 以许检明函示E 」事件时间被 日期扣,间 .................................... 事件丁19丁口山内二4”4“129 :厘#殂件已移除姆已汽=土卜I 19Tn^2:4.7rf.5.G5H0 19TDI4J9 2-47:4^.34S 耐.自咖总■百匍匚山的揖作帆过二STOP 1 D -197DWJ9 2 47:4^.D4J新的.自动幅■当前二MJ 的推作恨式:STOP11 ■1口7口"#2 4人44刀4:2 通信.自动的再求:5TOP-CPU^. RUN 哪到打ClF 建式 1 2 1 "明用2 g56.2M Rg 后切眼降作理式-CHJ A ST^PUJP 切播更| RUN 模式 1 5 1970M/? 2 W :S5.255 苴死切热眼作脏-CHJ A STOP 切榜到3TMTUF 触 14 19北洱川"M 班.厘应后切推展作g-阪A STOP 讣磷值5 瞰则STOP15 1970f4W2ijd :E6.163 厦件蛆件已瞬理共查看在线状态下模块的信息There! zhifMences hetv.een tl-ie inLeit*1:] module and tlie i noduk coniiyutH-d in rhe projeciIh£ rncdul e do 己二 not m :.i 才口nlinw在境访何=筋或掌我 四母攫冲区 福姆病 芹转告▼Oiogncot Diagnostic status FP:?FIBU7- interface [:<l ]jiyiiQi Mi>dr >.i匚口bo<较新版本的CM1243-5例如V1.3版本在TIA V13 SP1中查看诊断缓冲区里从站丢站的信息记录如下:PROFIBUS DP通讯故障诊断方法3、通过程序读取DP 从站诊断信息CM1243-5使用DPNRM_DG 指令,可以读取PROFIBUS DP 从站 的诊断数据。
西门子 SIMATIC 组态硬件和通讯连接, STEP 7 V5.3 版本 手册

更多支持
如果有任何技术问题,请联系西门子代表或代理商。 您可以在下列网页中查找联系人: /automation/partner
培训中心
西门子提供了很多培训教程,帮助您熟悉 SIMATIC S7 自动化系统。请联系当地的 培训中心,或位于德国纽伦堡(D 90327)的培训总部,以获取详细信息。 电话: 网址: +49 (911) 895-3200.
在线帮助中的主题“新增内容?”中极好地概括和介绍了最新的 STEP 7 新内容。
组态硬件和通讯连接,STEP 7 V5.3 版本 A5E00446503-01
iii
前言
STEP 7 文档包
本手册是文档包“STEP 7 基本信息”的一部分。 下表显示了 STEP 7 文档的总览:
文档 STEP 7 基础信息 • • • • • • STEP 7 V5.3,使用入门手册 使用 STEP 7 V5.3 编程 组态硬件和通讯连接,STEP 7 V5.3 版 本 从 S5 到 S7,变频器手册 用于 S7-300/400 的梯形图(LAD)/功能 块图(FBD)/语句表(STL)手册 S7-300/400 的标准功能及系统功能 提供了参考信息,并描述了编程语 6ES7810-4CA07-8BW1 言 LAD、FBD、STL、标准功能以 及系统功能,扩充了 STEP 7 基础 信息的范围。 用途 订货号
亚洲/澳洲(北京) 技术支持和授权
当地时间: 周一至周五, 8:00 - 5:00 PM 电话: 传真: +86 10 64 75 75 75 +86 10 64 74 74 74 格林威治 标准时间: +8:00
电子邮件: adsupport@
电子邮件: simatic.hotline@
琦基V880 梦幻双翼

来 看 ,效 果 还 是 比 较 令 人 满 意 l摄 像 头 ,可 以 用 于 3 G视 频 通 l
的 。 摄 像 头 可 以 拍 摄 的 视 频 最 大
V880支 持 两 种 无 线 连 接
方 式 。 那 就 是 蓝 牙 和W i 。 —Fi
f支持 的 格 式包 括 MP 、W A 、 3 V
硬 件 配 置
琦基v 0 鹋 采用 了高通MSM7 2 67 处 理器 ( 0 M 和4 0 HZ 有6 0 HZ 0 M 两个
内干 J ,P l Pii 中 兴 N6X ̄是 玄 am x和 (2 :
细 节介 绍
采 用 的此 款CPU) ,ROM和 RAM都
J
- 一 - - 一
从 机 身 外 部 就 看 不 到 其 他 接 口
了。
分辨率 的照 片 ,支持 自动 对焦 、
微距模 式等 功能 。从 拍 照的样 张
l 音频播放 在 机 身正 面 的屏 幕 上 方 还 有 副 I
音频 播放 功能对 于W M系统
话 。 当 然 了 。 这 需 要 中 国 电 信 l的手机 来说不 是什 么大的 问题 ,
分 辨 率 为6 0x4 0 素 ,不 过 4 8像 视 频录制 不支持 自动对焦 。 除 了机 身 背面 的 摄 像 头 ,
的3 G网 络 支持 。 副摄 像 头 也 可 以拍照 ,不过只 有3 万像素 。 0
另外 ,我们 已经 说过 机 身顶部 有
35 _ mm的耳机 接 口。除 此之外 ,
的要求。 +优点 功能强 ; 价格适中。
一
体验 显 然有些 影 响 。从 实际使 用来 看 ,大 多数 时候 触 控操 作 的反应 还 是 非常 灵敏 的 ,但是 对于 一 些 细微 的操作 可能会 出现误差 。 排除 操作 体验 的 因素 ,单 看 屏
PS690U系列保护测控装置技术使用说明书V1.3
2009-12-24
2009-12-11 2009-7-27 2008-4-2 修改日期
* 技术支持
电话:(025)83537262
传真:(025)83537201
* 本说明书可能会被修改,请注意核对实际产品与说明书的版本是否相符
* 2010 年 8 月 第 1 版 第 1 次印刷
NI-DAQ快速入门指南
qdma 基本原理
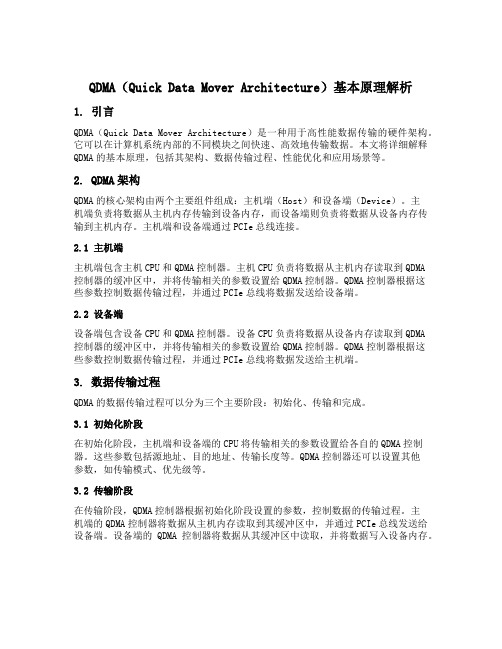
QDMA(Quick Data Mover Architecture)基本原理解析1. 引言QDMA(Quick Data Mover Architecture)是一种用于高性能数据传输的硬件架构。
它可以在计算机系统内部的不同模块之间快速、高效地传输数据。
本文将详细解释QDMA的基本原理,包括其架构、数据传输过程、性能优化和应用场景等。
2. QDMA架构QDMA的核心架构由两个主要组件组成:主机端(Host)和设备端(Device)。
主机端负责将数据从主机内存传输到设备内存,而设备端则负责将数据从设备内存传输到主机内存。
主机端和设备端通过PCIe总线连接。
2.1 主机端主机端包含主机CPU和QDMA控制器。
主机CPU负责将数据从主机内存读取到QDMA控制器的缓冲区中,并将传输相关的参数设置给QDMA控制器。
QDMA控制器根据这些参数控制数据传输过程,并通过PCIe总线将数据发送给设备端。
2.2 设备端设备端包含设备CPU和QDMA控制器。
设备CPU负责将数据从设备内存读取到QDMA控制器的缓冲区中,并将传输相关的参数设置给QDMA控制器。
QDMA控制器根据这些参数控制数据传输过程,并通过PCIe总线将数据发送给主机端。
3. 数据传输过程QDMA的数据传输过程可以分为三个主要阶段:初始化、传输和完成。
3.1 初始化阶段在初始化阶段,主机端和设备端的CPU将传输相关的参数设置给各自的QDMA控制器。
这些参数包括源地址、目的地址、传输长度等。
QDMA控制器还可以设置其他参数,如传输模式、优先级等。
3.2 传输阶段在传输阶段,QDMA控制器根据初始化阶段设置的参数,控制数据的传输过程。
主机端的QDMA控制器将数据从主机内存读取到其缓冲区中,并通过PCIe总线发送给设备端。
设备端的QDMA控制器将数据从其缓冲区中读取,并将数据写入设备内存。
3.3 完成阶段在完成阶段,QDMA控制器将传输结果通知给主机端和设备端的CPU。
Q&A热线

S I hs  ̄置 ” 并 在S I 置 一栏 中选择 达 到最 佳3 性 能” 点击 “ 用” 此 时, L 解成 功 ! L 和P yX , L 配 D 并 应 SI 破 当然 要实 现一键 式 “ 解 还必 须满 足 以下 要求 1 破 , . 系统 为Wi o s P ia7 2 操作 n w / s /; . 具备 两 条或 以上P I 1插 d X Vt 主板 C— X 6 E
S I th 实是 一 个 自动 化操 作 的小 工具 , L ac 其 P 它集合 了破 解 S I 需 的编 码 。 户只需 运行 该 软件 , L 所 用 软件便 会 自行 修 改A P C I
信息 强制 让 显卡将 主板 识 别 为X 8 从 而 令 非x 8 5 5 主板 支持 S I据 悉 , L。 能使 用该 软件 进 行 S I 解 的 主板 除 P 5 1 5主 板 L破 5gH5 3 外, 还包 }A 9 F 、7 、 8G 80 X 板 。  ̄ MD80 X 80 80 和 8 G 主 软件 的操 作 很简单 下载 后点击 I tl 直 接 运行。 秒后 会 出现 “a hhsbe s ldsces l” 示 . 说 明软 n a” s l 数 P t a e ni tl ucsf l 提 c n ae uy 这
Q FI 热 线 l \ l
破 解 SL 功 能 I
S I 卡互联技术可以显著提升系统的游戏性能 , L显 但
N lI对S I 术 并没有全 面开 放 . VDA L 技 只有 获 得N II授权 的 V DA 主 板 才可 以开 启S I 能 如 部分 P 5 L 功 例 5主板 。 刊曾经 介 绍 本
青岛版小学信息技术六年级上册《救援车动起来》同步练习题附知识点归纳

青岛版小学信息技术六年级上册《救援车动起来》同步练习题附知识点归纳一、课文知识点归纳:本课主要介绍了救援车的运动控制原理,包括Arduino控制板的基本功能和使用方法。
通过连接救援车和Arduino控制板,并利用Arduino编程来控制救援车的运动,培养了学生的编程兴趣和解决问题的能力。
二、同步练习题。
(一)、填空题。
1. 救援车动起来的关键是通过_________进行编程控制。
2. Arduino控制板的主要功能是_________。
(二)、选择题。
1. 救援车与Arduino控制板连接时,应该使用哪种接口?()A. HDMIB. USBC. HDMI和USB都可以D. 其他接口2. 在使用Arduino编写救援车程序时,以下哪个步骤是首先进行的?()A. 连接电源B. 选择Arduino型号C. 编写程序代码D. 打开ArduBlock窗口3. 救援车前进的程序代码中,通常会包含哪个指令?()A. forwardB. backwardC. stopD. turn(三)、判断题。
(正确的打“√”,错误的打“×”)1. 救援车的运动方向完全由Arduino控制板决定,与其他硬件无关。
()2. 编写救援车程序时,必须熟悉Arduino的编程语言。
()3. 救援车动起来的教学目标是培养学生的编程兴趣和解决问题的能力。
()(四)、简答题。
1. 请简述救援车与Arduino控制板连接的主要步骤。
__________________________________________________________________ __________________________________________________________________ __________________________________________________________________ 2.在编写救援车前进的程序时,你通常会考虑哪些因素?__________________________________________________________________ ____________________________________________________________________________________________________________________________________三、学习目标:1. 知识目标:了解开源硬件的组成和功能,掌握Arduino控制板的基本使用方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
备注:红色字为在“ZOLL”心电监护仪上的操作。
扁鹊飞救系统与ZOLLM系列多参连接步骤
1、客户端方面
启动IETwin8平板—点击胸痛急救+,输入“姓名”,选择医院,点击提交(其 他信息可以在测量过程中或测量完成后补填)
2、正确在病人身上佩戴ZOLL多参的测量设备(包括12导心电图) 3、“ZOLL”心电监护仪方面
打开ZOLL旋转到“监护”位—按“导联选择”,切换导联(Ⅱ)—按综合报 告—实时开始
4、客户端方面
点击扁鹊飞救客户端的“菜单”—点击“一键连接”
5、“ZOLL”心电监护仪方面
(连接过程中,多参左上角的一对*号来回闪动,成功后,停止闪动)—按多
参右下角“12导”—按获取(此时获取的多参数据会自动上传到扁鹊飞救客户 端)