3.2 第四讲 权及中误差的计算
第四讲定位误差的分析与计算一详解
由于定位副的制造误差,将产生定位基准位移误差,即
Y
1 2 (Dmax
d0min )
1 2
D
1 2
d
0
在计算基准位移量时可不计Xmin的影响。由于ΔD =0,所以定位误差为
Da
Y
1 2
D
1 2
d
0
此时除基准位移误差外,还有基准不重合误差,所以尺寸h的定位误差为
Dh
Y
B
1 2
D
1 2
d
0
1 2
d
第十九页,共26页。
⑵孔与圆柱心轴任意边接触
在加工尺寸方向上的最大基准位移误差为
Y Dmax dmin X min D d X min
第二十页,共26页。
㈢工件以外圆定位
如不考虑V形架的制造误差,则工件定位基准在V形架的对称面上,因此工件中心
线在水平方向上的位移为零。但在垂直方向上,因工件外圆有制造误差,而产生基准 位移。其值为
序基准不重合,安装一批工件逐个在夹具上定位时,受尺寸
S
S
的影响,工序基准的位置是变动的,导致尺寸误差,这就是基准
2
不重合误差。
第四页,共26页。
图1—31
基准不重合误差的大小应等于因定位基准和工序基准不重合而造成的加工尺 寸的变动范围:
B Amax Amin S max S min s
第七页,共26页。
二、定位误差
的计算方法
D
1.合成法
工件定位时同时出现基准不重合和基准位移误差,定位误差为两项误
差的合成。
①当 B与 Y 无相关公共变量时(工序基准不在定位基面上),
D Y B
课件:权与定权的常用方法

安
排
二、单位权中误差
基础概念
由pi
2 0
2 i
,知
2 i
2 0
pi
权等于1的观测值称为单位权观测值 权等于1的观测值的方差称为单位权方差,也称为方差因子 权等于1的观测值的中误差称为单位权中误差
权的单位
同类观测值: 权是无量纲,无单位 不同类观测值:权有单位 例:边角网中设测角中误差单位为“秒”,测边中误差单位为“mm”
i
C Ni
若某段高差的测站数 Ni 1 ,则他的权为 pi C 当 pi 1时,有 Ni C
C的两个意义: (1)C是1测站的观测高差的权; (2)C是单位权观测高差的测站数
例:如图所示,已知各路线测站数分别为40,25,50,20,40,50,25.试确定
各路线高差的权。
2
P2
解: 取C=100,即取100个测站的观测高差为
pSi
2 公里
C
2 公里
Si
C Si
每公里的观测高差同精度时, 各路线观测高差的权与距离的公里数成反比
若 0单位取“秒”,则角度的权无单位,边长的权的单位为秒2 / m m2 若 0 单位取“mm”,则边长的权无单位,角度的权的单位是m m2 / 秒2
内
一、权的定义 容 二、单位权中误差
三、测量中定权的方法
安
排
三、定权常用方法
1.距离观测值的权
1.设单位长度(例如一公里)的距离观测值的方差为 2,则全长为S公
2
(a bSj )2
秒2 毫米2
注意:
在测量工作中,一般是先根据事先给定的条件,按上述方法确定观测值权, 然后进行平差,再根据权的定义式的变形公式,来求观测值或其他函数 的中误差。
计量经济学重点笔记第四讲
第四讲 异方差一、 同方差与异方差:图形展示对于模型12i i i y x ββε=++,在高斯-马尔科夫假定下有:12222()iii iy E y x εββδδδ=+==其中22iεδδ=意味着同方差假定成立。
为了理解同方差假定,我们先考察图一。
在图一中,空心圆点代表(,())i ix E y ,实心圆点代表观测值(,)i i x y 观测,i y 观测是随机变量i y 的一个实现(注意,按照假定,i x 是非随机的,即在重复抽样的情况下,给定i 的取值,ix 不随样本的变化而变化),倾斜的直线代表总体回归函数:12()i iE y x ββ=+。
图一显示了一个重要特征,即,尽管12,,...y y的期望值随着12,,...x x 的不同而随之变化,但由于假定222iiyεδδδ==,它们的离散程度(方差)是不变的。
然而,假定误差项同方差从而被解释变量同方差可能并不符合经济现实。
例如,如果被解释变量y 代表居民储蓄,x 代表收入,那么经常出现的情况是,低收入居民间的储蓄不会有太大的差异,这是因为在满足基本消费后剩余收入已不多。
但在高收入居民间,储蓄可能受消费习惯、家庭成员构成等因素的影响而千差万别。
图二能够展示这种现象。
图一同方差情况图二异方差情况在图二中,依据x1所对应的分布曲线形状,x5所对应的实心圆点看起来是一个异常点(但依据x5所对应的分布曲线形状,它或许称不上是异常点)。
异常点的出现是同方差假定被违背情况下的一个典型症状,事实上通过散点图来发现异常点从而初步识别异方差现象在实践中经常被采用,见图三。
浙江工商大学金融学院姚耀军讲义系列图三异方差情况下的散点图笔记:应该注意的是,如果第一个高斯-马尔科夫假定被违背,即模型设定有误,那么也可能出现异方差症状。
例如,正确模型是非线性的,但我们错误地设定为线性,以这个线性模型为参照,散点图也许显示出明显的异方差症状。
事实上,在很多情况下,异方差症状被认为是模型错误设定的一个表现。
第3部分(权协因数传播律真误差算中误差)
2012-4-25
5
第一章 观测误差及其传播
§1-5 权与定权的常用方法
三、常用定权的方法 常用定权的 权的方法
2.同精度观测值的算术平均值的权
L 设有 L1,L2, ,Ln
它们分别是
N 1,N 2, ,N n次同精度观测值的平均值, L
2 i
若每次观测的方差均为 σ 2 , 则 Li 的方差为: σ = 取: 则算术平均值 Li
线性化:
∂F1 ∂X 1 ∂F2 F = ∂X 1 LL ∂F r ∂X 1
dX 2 ∂F2 L ∂X 2 LL LL ∂Fr L ∂X 2 ∂F1 ∂X n ∂F2 ∂X n LL ∂Fr ∂X n
个元素也不再有权的意 义了。但是,相关观测 值向量的权阵 PXX 在平差 计算中,也能同样起到 同独立观测值向量的权 阵一样的作用。
2012-4-25
11
第一章 观测误差及其传播
§1-6 协因数与协因数传播律
二、协因数传播律 设有观测值向量 X 和 Y 的线性函数
Y = FX + F0 Z = KX + K 0
X i i = 1,2, L , ,其方差为σ i ( n)
2
PXX 称为 X 的权阵。
当Q XX 是对角阵时,权阵
2 PXX 的主对角线元素就是 ,权为 p i ,单位权方差为 σ 0 。 0 P1 0 L X i 的权; 0
D XX
n ,n
σ 12 0 L 2 0 σ2 L 0 = L L L L 2 0 0 σn 0
σ σ = 0 L 0
0
σ 22 σ 02
L 0
第四节误差传播定律第五节算术平均值及中误差资料

讨论一般函数,设有函数
其中
z f(
x1、x2
x1、x2 xn)
xn 为独立观测值。
中误差分别为: m1、m2 mn
设 x1、x2 xn 分别有真误差 x1、x2 xn
相应函数 随之产生真误差
根据变量的误差与函数的误差之间的关系近似用全微分表达求函数的全 微分,舍取二次以上各项得:
K22m22
K
m 2 2
nn
[例题]:丈量得倾斜距离s=50.00m,其中误差 ms 0.05,并测得倾斜角
150000,其中误差 m 30 ,求相应水平距离D及其中误差。
解:首先列出函数式 D=Scos 水平距离D=50∙cos15ْ =48.296m 这是个非线性函数,所以要用公式(6-9)求函数的中误差。先求出个偏导数如下:
n
所以
lim n
x
X
在有限次观测时,所求得观测值 是接近真值的值,因此算术平均值是 观测量的最可靠值。(最或然值)
二、算术平均值的中误差
在同精度观测条件下,得观测值L1、L2┉Ln,中误差 均相同为m,算术平均值如下。
x
L
n
1 n
L1
1 n
L2
1 n
Ln
根据误差传播定律中误差式为:
2 n2
按级数展开取第一项得:
x2
n2
m2 n
代入得: m2 vv
由以上可得:
m2 vv
n 1
m
vv
n1
(白塞尔公式)
M
vv
n(n 1)
D cos cos15 0.9659 D s sin 50 sin 15 12.9410
第四讲龙格-库塔方法

第四讲龙格-库塔⽅法龙格-库塔⽅法3.2 Runge-Kutta法3.2.1 显式Runge-Kutta法的⼀般形式上节已给出与初值问题(1.2.1)等价的积分形式(3.2.1)只要对右端积分⽤不同的数值求积公式近似就可得到不同的求解初值问题(1.2.1)的数值⽅法,若⽤显式单步法(3.2.2)当,即数值求积⽤左矩形公式,它就是Euler法(3.1.2),⽅法只有⼀阶精度,若取(3.2.3)就是改进Euler法,这时数值求积公式是梯形公式的⼀种近似,计算时要⽤⼆个右端函数f的值,但⽅法是⼆阶精度的.若要得到更⾼阶的公式,则求积分时必须⽤更多的f值,根据数值积分公式,可将(3.2.1)右端积分表⽰为注意,右端f中还不能直接得到,需要像改进Euler法(3.1.11)⼀样,⽤前⾯已算得的f值表⽰为(3.2.3),⼀般情况可将(3.2.2)的表⽰为(3.2.4)其中这⾥均为待定常数,公式(3.2.2),(3.2.4)称为r级的显式Runge-Kutta法,简称R-K⽅法.它每步计算r个f值(即),⽽k由前⾯(i-1)个已算出的表⽰,故公式是显式的.例i如当r=2时,公式可表⽰为(3.2.5) 其中.改进Euler 法(3.1.11)就是⼀个⼆级显式R-K ⽅法.参数取不同的值,可得到不同公式.3.2.2 ⼆、三级显式R-K ⽅法对r=2的显式R-K ⽅法(3.2.5),要求选择参数,使公式的精度阶p 尽量⾼,由局部截断误差定义11122211()()[(,())(,)]n n n n n n n T y x y x h c f x y x c f x a h y b hk ++=--+++ (3.2.6)令,对(3.2.6)式在处按Taylor 公式展开,由于将上述结果代⼊(3.2.6)得要使公式(3.2.5)具有的阶p=2,即,必须(3.2.7)即由此三式求的解不唯⼀.因r=2,由(3.2.5)式可知,于是有解(3.2.8)它表明使(3.2.5)具有⼆阶的⽅法很多,只要都可得到⼆阶精度R-K⽅法.若取,则,则得改进Euler法(3.1.11),若取,则得,此时(3.2.5)为(3.2.9)其中称为中点公式.改进的Euler法(3.1.11)及中点公式(3.2.9)是两个常⽤的⼆级R-K⽅法,注意⼆级R-K⽅法只能达到⼆阶,⽽不可能达到三阶.因为r=2只有4个参数,要达到p=3则在(3.2.6)的展开式中要增加3项,即增加三个⽅程,加上(3.2.7)的三个⽅程,共计六个⽅程求4个待定参数,验证得出是⽆解的.当然r=2,p=2的R-K⽅法(3.2.5)当取其他数时,也可得到其他公式,但系数较复杂,⼀般不再给出.对r=3的情形,要计算三个k值,即其中将按⼆元函数在处按Taylor公式展开,然后代⼊局部截断误差表达式,可得可得三阶⽅法,其系数共有8个,所应满⾜的⽅程为(3.2.10)这是8个未知数6个⽅程的⽅程组,解也是不唯⼀的,通常.⼀种常见的三级三阶R-K⽅法是下⾯的三级Kutta⽅法:(3.2.11)附:R-K 的三级Kutta ⽅法程序如下function y = DELGKT3_kuta(f, h,a,b,y0,varvec) format long; N = (b-a)/h;y = zeros(N+1,1); y(1) = y0; x = a:h:b;var = findsym(f); for i=2:N+1K1 = Funval(f,varvec,[x(i-1) y(i-1)]);K2 = Funval(f,varvec,[x(i-1)+h/2 y(i-1)+K1*h/2]); K3 = Funval(f,varvec,[x(i-1)+h y(i-1)-h*K1+K2*2*h]);y(i) = y(i-1)+h*(K1+4*K2+K3)/6; %满⾜c1+c2+c3=1,(1/6 4/6 1/6)endformat short; 3.2.3 四阶R-K ⽅法及步长的⾃动选择利⽤⼆元函数Taylor 展开式可以确定(3.2.4)中r=4,p=4的R-K ⽅法,其迭代公式为111223344()n n y y h c k c k c k c k +=++++其中1(,)n n k f x y =,2221(,(,))n n n n k f x a h y b hf x y =++,⽽33311322(,)n n k f x a h y b hk b hk =+++ 44411422433(,)n n k f x a h y b hk b hk b hk =++++共计13个参数待定,Taylor 展开分析局部截断误差,使得精度达到四阶,即误差为5()O h 。
测量平差 第三章 误差传播律与权

1
σX X 2 σX
1 2
2
σX X ⎤ ⎥ σX X ⎥
1 n 2 n
1
σX
nX2
2 σX
n
⎥ ⎥ ⎥ ⎦
⎡ μY1 ⎤ ⎡ E (Y1 ) ⎤ ⎡Y1 ⎤ ⎢ ⎥ ⎢ ⎥ ⎢Y ⎥ ⎢ μY2 ⎥ = ⎢ E (Y2 )⎥ Y = ⎢ 2 ⎥ μY = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ μYr ⎥ ⎣ E (Yr ) ⎦ ⎣ ⎦ ⎣Yr ⎦
误差理论与测量平差基础
北京建筑工程学院 测绘工程系
把观测值函数表示为矩阵形式
⎡L ⎤ 1 2 1 1⎤ ⎢ ⎥ ˆ ⎡ L = ⎢ − − ⎥ ⎢L2 ⎥ +60 1 ⎣3 3 3⎦ ⎢L3 ⎥ ⎣ ⎦
⎡2 ˆ ⎡L ⎤ ⎢ 3 1 ⎢ ⎥ ⎢ 1 ˆ ˆ L = ⎢L2 ⎥ = ⎢− ⎢ˆ ⎥ ⎢ 3 ⎢L3 ⎥ ⎢ 1 ⎣ ⎦ ⎢ − ⎢ 3 ⎣
β ,其中误差 β 2
B
A
β1 β2 x
α
C
误差理论与测量平差基础
北京建筑工程学院 测绘工程系
1. 把已知条件写成矩阵、向量形式
⎡ β1 ⎤ β =⎢ ⎥ ⎣ β2 ⎦
⎡ σ 12 σ 12 ⎤ ⎡1.96 −1 ⎤ =⎢ = 2⎥ σ 21 σ 2 ⎦ ⎢ −1 1.96 ⎥ ⎣ ⎦ ⎣
观测量
方差
DXX
⎡1 = σ = KDLL K = ⎢ ⎣7
2 X T
2 7
σ X = 0.84 = 0.9mm
误差理论与测量平差基础
北京建筑工程学院 测绘工程系
协方差计算步骤:
D X X
希望同学们把它记下来
误差及分析数据的统计处理优秀课件.ppt
x1 x2
x3
x4
二、误差的分类及减免方法 (一)、产生误差的原因
误差产生的原因分为系统误差、随机 误差和过失误差三类。
1. 系统误差 由于某些固定的原因造成的误差称
为系统误差。 特点:重复出现,方向一致,大小
可以估计。
系统误差又称可测误差, 影响准确度。 系统误差又分为: 方法误差、仪器误差、 试剂误差和操作误差。
几次测定所得值: x1 , x2 , … xi … xn
n
... xi
平均 : 值 xx1x2 xni1
n
n
绝对 :偏 d i差 xix
相对:偏 差 drdi10% 0 x
此偏差代表某一个数据的精密度高低,
即其与平均值接近的程度。
(2)平均偏差与相对平均偏差
n
di
平均偏:差 d i1 n
又称不可测误差。 随机误差影响精密度。
3. 过失误差 由于操作者某些失误引起的误差。 如:溶液溅失,读错滴定管、砝码
等。
(二)、误差的减免方法 1.系统误差
系统误差大小的判断:
回收率
x3 x1 x2
100%
x1 x2 x3
原样品测得的含量 加入的量 加入后测得的含量
减免方法: 方法校正、仪器校准、 空白试验、对照试验。
如:原子量的测定常需测几十次,甚至上百次。
3. 过失误差 减免方法:认真操作,舍弃差别特别
大的数据。 若出现过失误差就需重做。
三、公差
生产部门对分析结果允许的误差。
不同含量样品的公差
组分(%)
90 80 40 20
公差(相对平 0.3 0.4 0.6 1.0 均偏差,%)
1.5权与定权的常用方法(精)

2 2 2) 一组观测值的权,其大小是随 0 的不同而异,但不论 0
选用何值,权之间的比例关系始终不变。 3) 为了使权能起到比较精度高低的作用,在同一问题中只能 2 选定一个 0 值,否则就破坏了权之间的比例关系。 4) 事先给出一定的条件,就可以确定出观测值的权的数值。 5) 权是用来比较各观测值相互之间精度高低的,权的意义不 在于它们本身数值的大小,重要的是它们之间所存在的比例 关系。
二、单位权中误差
2.权的单位
2 2 0 由pi 2 ,知 i2 0 i pi
同类观测值: 权是无量纲,无单位; 不同类观测值: 权是有单位的。
例如边角网中: 设测角中误差单位为“秒”;测边中误差单位为“mm”;
2 2 若 0单位取秒,则角度的权无单位,边长的权的单位为: 秒 / mm
若 0单位取mm,则边长的权无单位,角度的权的单位为: mm2 / 秒2
1-5 权与定权的常用方法
一、权的定义 二、单位权中误差 三、测量中定权的常用方法
三、测量1)设每一测站观测高差的精度相同,其方差相等,均
2 为 站 ;第i条水准线路的观测高差为 hi ,测站数为 N i ,
观测高差:h1、h2、h3、h4 水准路线长度:S1 1.0km S2 2.0km
平差计算之前,精度的绝对数字特
征(方差)往往是不知道的,而精 度的相对的数字特征(权)却可以
S3 4.0km S4 8.0km
设每公里观测高差的方差为: 各水准路线的方差为:
2 公里 后根据平差的结果估算出表示精度
若已知第 4 条路线观测高差的权为 3 ,试求其
他各路线观测高差的权。
三、测量中定权的常用方法
2.同精度观测值的算术平均值的权
3.2 第四讲 权及中误差的计算解析

当所有观测对为等精度是, 其单位中误差为
0
dd
2n
Li Li 0
' ''
对于单个观测值而言,其中误差为
1 pi
第i个观测对的平均值的中误差
L
Li
''
2
0
1 2 pi
例:设分5段测定A,B两水准点间的高差,每段各测两次 ,其结果列于下表,试求(1)每公里观测高差的中误差, (2)第二段观测高差的中误差,(3)第二段高差的平均 值的中误差,(4)全长一次(往返测)观测高差的中误差
' L1 , L'2 , , L'n '' ' ' L1 , L'2 , , L'n
' '' d L L 双观测差数为: i i
又设同一对观测时等精度的,不同的观测对精度不同,且 各观测对的权为
求单位权中误差?
4
由双观测值之差计算中误差
一对观测的差数为: 差数的真误差为: 按权倒数传播律可得差数的权为:
1 1 1 2 pdi pi pi pi
pi pd i 2
用不等精度观测的真误差计算单位权中误差估值为:
可得
ˆ0 pd d d n
p dd 2 n
pdd
2n
4
由双观测值之差计算中误差
观测对之差的单位权中 误差为
0
pd dd pdd
pi
2 0 2 i
称为观测值Li的权。权与方差成反比。
2 2 2 0 0 0 1 1 1 p1 : p2 : pn 2 : 2 : : 2 2 : 2 : : 2 1 2 n 1 2 n
3.2 第四讲 权及中误差的计算解析
设观测值为Li,i=1,2,…,n;数学期望为u,观测 的真误差为 i ,并且服从正态分布, (1)等精度观测的情况下,单位权中误差估值为:
0
n
(2)不等精度观测的情况下,单位权中误差估值为:
0
p
n
二、单位权中误差的计算
2 由改正数计算中误差
2 L
2 2 2 0 0 0 pL 2 2 n 2 np L ( n)
算术平均数的权是等精度观测值的权的n倍
一、权与定权的常用方法
3、测量上确定权的常用方法举例
(2)水准测量的权 设每公里观测高差独立且等精度,每公里中误差为σkm 设水准路线长S,且Skm的观测高差值为h,有
pL 5 所以每次丈量10km的距离的权为: p10 0.5 n 10 C C P P S 长度为 i 的距离的权为: i 10 10 Si
C 5
P2.5
C 2 2 .5
σ02=Cσ2KM
本题演算中是以5km距离一次丈量 中误差作为单位权中误差的。
二、单位权中误差的计算
一、权与定权的常用方法
3、测量上确定权的常用方法举例
(1)同精度独立观测算术平均数的权
L 1 ( L1 L2 Ln ) n
2 2
02 p 2
1 1 1 2 2 ( 12 2 n ) n 2 2 n n n
' L1 , L'2 , , L'n '' ' ' L1 , L'2 , , L'n
' '' d L L 双观测差数为: i i
加权平均值及其中误差
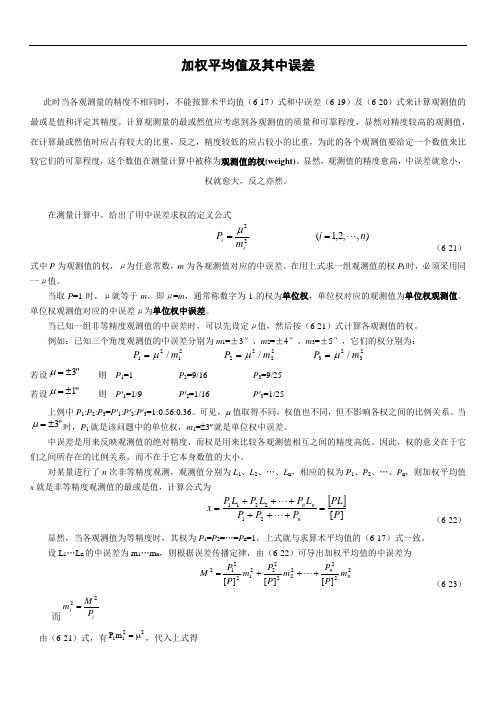
加权平均值及其中误差此时当各观测量的精度不相同时,不能按算术平均值(6-17)式和中误差(6-19)及(6-20)式来计算观测值的最或是值和评定其精度。
计算观测量的最或然值应考虑到各观测值的质量和可靠程度,显然对精度较高的观测值,在计算最或然值时应占有较大的比重,反之,精度较低的应占较小的比重,为此的各个观测值要给定一个数值来比较它们的可靠程度,这个数值在测量计算中被称为观测值的权(weight)。
显然,观测值的精度愈高,中误差就愈小,权就愈大,反之亦然。
在测量计算中,给出了用中误差求权的定义公式),,2,1(22n i mP ii ==μ (6-21)式中P 为观测值的权,μ为任意常数,m 为各观测值对应的中误差。
在用上式求一组观测值的权P i 时,必须采用同一μ值。
当取P =1时,μ就等于m ,即μ=m ,通常称数字为1的权为单位权,单位权对应的观测值为单位权观测值。
单位权观测值对应的中误差μ为单位权中误差。
当已知一组非等精度观测值的中误差时,可以先设定μ值,然后按(6-21)式计算各观测值的权。
例如:已知三个角度观测值的中误差分别为m 1=±3″、m 2=±4″、m 3=±5″,它们的权分别为:232322222121///m P m P m P μμμ===若设"3±=μ 则 P 1=1P 2=9/16P 3=9/25 若设"1±=μ 则 P '1=1/9 P '2=1/16P '3=1/25上例中P 1:P 2:P 3=P '1:P '2:P '3=1:0.56:0.36。
可见,μ值取得不同,权值也不同,但不影响各权之间的比例关系。
当"3±=μ时,P 1就是该问题中的单位权,m 1=±3"就是单位权中误差。
中误差是用来反映观测值的绝对精度,而权是用来比较各观测值相互之间的精度高低。
中误差和协方差
中误差和协方差
中误差和协方差都是在统计学和概率论中常用来描述数据特征的统计量。
中误差是指在相同的测量条件下,对同一个量进行多次测量,所测得的数据与真值之间的平均偏差。
它反映了测量值的离散程度,可以通过多次测量取平均值的方法减小中误差。
协方差是用来度量两个变量之间的总体误差,即描述两个变量之间的相对于各自的期望值的变化趋势。
如果两个变量的变化趋势一致,那么它们之间的协方差就是正值;如果两个变量的变化趋势相反,那么它们之间的协方差就是负值。
协方差可以反映两个变量之间的相关性,但不能说明相关的程度,若衡量相关程度,则使用相关系数。
在实际应用中,中误差和协方差都有重要的作用,可以帮助我们更好地理解和分析数据。
32第四讲权及中误差的计算-文档资料
ˆ 3 ˆ
2
2
1 ˆ ˆ 3 n 3
菲列罗公式
3
由三角闭合差求测角中误差
例1:对一三角形的三个角进行了九组同精度 的观测,各组观测值是对各角分别观测四回的平均 值,得到三角形闭合差为:
.5 经检验,各闭合差包含有系统性的常误差 0
2 . 5 1 . 5 3 . 5 3 . 5 2 . 5 0 . 5 5 . 5 2 . 5 2 . 5
一、权与定权的常用方法
2、单位权中误差
令σi=σ0,则得:
1 P
i 2 0 2 i 2 0 2 0
0 称为单位权中误差,权 等于1的观测值称为单位权观 测值。
一、权与定权的常用方法
例:在图中水准网中,在认为每公里观测值高差的精 度相同的前提下,确定各条路线的权 S1=1.0km
S3=4.0km S2=2.0km S4=8.0km
设每公里观测值高差的方差为 σ2公里 ,各水准路线的方差为 σ12=S1σ2公里 σ22=S2σ2公里 σ32=S3σ2公里 σ42=S4σ2公里 σ02=σ42
令: σ02=σ12 按权的定义各路线观测值的权为
???
P1=1.0, P2=0.5, P3=0.25, P4=0.125
本节内容
第四讲 权与单位权中误差
一、权与定权的常用方法
1、权的定义
设 Li (i 1 ,2,...,n),它们的方差为 i2, 如选定任一常数 0,则定义 :
2 0 pi 2 i
称为观测值Li的权。权与方差成反比。
11 1 p : p : p : : : : : :
权与定权的常用方法

:
2 0 2 2
::
2 0 2 n
1
2 1
:1
2 2
::1
2 n
2021/4/27
5
1-5 权与定权的常用方法
一、权的定义 二、单位权中误差 三、测量中定权的常用方法
2021/4/27
6
二、单位权中误差
1.定义
由pi
2 0
2 i
,知
2 i
2 0
pi
权等于1的观测值称为单位权观测值。
权等于1的观测值的方差称为单位权方差。
1.合理的选择按键的类型,尽量选择 平头类的按键,以防按键下陷。
2.开关按键和塑胶按键设计间隙建议 留0.05~0.1mm,以防按键死键。 3.要考虑成型工艺,合理计算累积公 差,以防按键手感不良。
三、测量中定权的常用方法
1. 水准测量高差的权
(1)设每一测站观测高差的精度相同,其方差相等,均
为
2 站
2021/4/27
16
三、测量中定权的常用方法
2.同精度观测值的算术平均值的权
pi
2 0
2 i
Ni C
由不同次数的同精度观测值所算得的算术平均值, 其权与观测次数成正比。
常数C有两个意义:(1)C是1次观测的权倒数; (2)C是单位权观测值的观测次数。
2021/4/27
17
三、测量中定权的常用方法
2 公里
Si
C Si
2021/4/27
13
三、测量中定权的常用方法
1. 水准测量高差的权
pSi
公2 里C 公2 里Si
C Si
p1:p2::pn
C :C ::C
S1 S2
中误差.
相对中误差 (续)
显然,对于1 000 m的距离,相对中误差为 0.02 m/1 000 m=1/50 000;对于100 m的距离来说,相对中误差为0.02 m/100 m=/5 000。两者比较,分母愈大,相对 中误差愈小。可见,1 000 m的那段距离丈 量精度较好
评定精度的指标
衡量观测值精度高低,可以用前所述的方法,用 列表和组成直方图来分析误差分布的情况并加以 比较,但这样做,对于实际工作既不方便,又没 有一个简单的关于精度的数量概念 既然精度是指一组误差分布的密集或离散的程度, 那么分布得密集,就表示在该组误差中,绝对值 较小的误差所占的个数相对就愈多。在此情况下, 该组误差的平均大小就反映了该组观测精度的高 低 用一组误差的平均大小来作为衡量精度的指标, 实际上有几种不同的定义。下面仅介绍几种常用 的精度指标。
北京工业职业技术学院国家精品资源共享课程
成果转化、专业教学资源库
《地形测量》
授课老师:郑佳荣 崔有祯
评定精度的指标
在一定观测条件下进行一组观测,必然对应着一 种偶然误差分布。如果分布较为密集,则表示该 组观测质量较好,也即观测精度较高;反之,如 果分布较为离散,则表示该组观测质量较差,也 即观测精度较低。 因此,所谓精度,是指偶然误差分布的密集或离 散的程度 在相同观测条件下所进行的一组观测,由于它对 应着同一种误差分布,故对于这一组中的每个观 测值,均称作等精度观测值。若两组观测成果的 误差分布相同,便是此两组观测成果的精度相等; 反之,若误差分布不同,则精度亦不等。
1、中误差
在一定的观测条件下,对某量进行n次观测, 观测值分别为l1、l2、…、ln,其真误差分 别为△1、△2、…、△n。真误差的平方和的 平均值的平方根,作为评定精度的标准,这 就叫中误差,以m表示为 m值反映了该组观测精度的好坏,它代表了 该组观测值中每一个观测值的精度。m值愈 小,精度愈高;m值愈大,精度愈低
百科知识精选中误差
中文名:中误差英文名:root mean square error;RMSE代替值:真值只能用最或然值性质:描述代数误差别名:标准差”或“均方根差”方法:最小二乘法计算:观测值与真值偏差平方和定义:衡量观测精度的一种数字标准计算公式测量误差按其对测量结果影响的性质,可分为:一.系统误差(system error)1.定义:在相同观测条件下,对某量进行一系列观测,如误差出现符号和大小均相同或按一定的规律变化,这种误差称为系统误差。
2.特点:具有积累性,对测量结果的影响大,但可通过一般的改正或用一定的观测方法加以消除。
二.偶然误差(accident error)1.定义:在相同观测条件下,对某量进行一系列观测,如误差出现符号和大小均不一定,这种误差称为偶然误差。
但具有一定的统计规律。
2.特点:(1)具有一定的范围。
(2)绝对值小的误差出现概率大。
(3)绝对值相等的正、负误差出现的概率相同。
(4)数学期限望等于零。
即:误差概率分布曲线呈正态分布,偶然误差要通过的一定的数学方法(测量平差)来处理。
此外,在测量工作中还要注意避免粗差(gross error)(即:错误)的出现。
§2衡量精度的指标测量上常见的精度指标有:中误差、相对误差、极限误差。
一.中误差方差——某量的真误差,∑——求和符号。
规律:标准差估值(中误差m)绝对值愈小,观测精度愈高。
在测量中,n为有限值,计算中误差m的方法,有:1.用真误差(true error)来确定中误差——适用于观测量真值已知时。
真误差Δ——观测值与其真值之差,有:标准差中误差(标准差估值), n为观测值个数。
2.用改正数来确定中误差(白塞尔公式)——适用于观测量真值未知时。
V——最或是值与观测值之差。
一般为算术平均值与观测值之差,即有:二.相对误差1.相对中误差2.往返测较差率K三.极限误差(容许误差)常以两倍或三倍中误差作为偶然误差的容许值。
即:。
§3误差传播定律一.误差传播定律设、…为相互独立的直接观测量,有函数,则有:二.权(weight)的概念1.定义:设非等精度观测值的中误差分别为m1、m2、…mn,则有:权其中,n为任意大小的常数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、权与定权的常用方法
• 权的定义 • 单位权 • 测量中常用的定权方法
二、单位权中误差的计算
• 由真误差计算中误差 • 由改正数计算中误差 • 由三角形闭合差计算测角中误差 • 由双观测值之差计算中误差
第四讲 权与单位权中误差
一、权与定权的常用方法
1、权的定义
设Li
(i
1,2,...,
nt
,
,
3
由三角闭合差求测角中误差
已知等精度独立观测三角形之内角,由此得到内角和
闭合差为 i ,求测角中误差 ˆ ?
三角形的闭合差是中误差, 当n有限内角和的中误差为
ˆ
n
设三角形观测时每个内角的测角中误差相等 ˆ ,且独立,
则由误差传播律得
ˆ 2 3ˆ 2
算术平均数的权是等精度观测值的权的n倍
一、权与定权的常用方法
3、测量上确定权的常用方法举例
(2)水准测量的权
设每公里观测高差独立且等精度,每公里中误差为σkm 设水准路线长S,且Skm的观测高差值为h,有
σh2=Sσ2km
σ02=Cσ2km
则有Skm的观测高差的权为:
ph
2 0 2 h
C
n
pdd
2n
当所有观测对为等精度是, 其单位中误差为
0
dd
2n
对于单个观测值而言,其中误差为 第i个观测对的平均值的中误差
Li ' Li '' 0
1 pi
L
Li ''
2
0
1 2 pi
例:设分5段测定A,B两水准点间的高差,每段各测两次 ,其结果列于下表,试求(1)每公里观测高差的中误差, (2)第二段观测高差的中误差,(3)第二段高差的平均 值的中误差,(4)全长一次(往返测)观测高差的中误差
2 km
S
2 km
C S
水准测量中高差的权与路线长成反比
一、权与定权的常用方法
3、测量上确定权的常用方法举例
(3)水准测量的权 设每站观测高差独立且等精度,每站中误差为σ站
n站所测的总高差为:
σh2=nσ2站 σ02=Cσ2站
总高差的权为ph Nhomakorabea
2 0 2 h
C
2 站
n 2站
C n
解:令C=1.即1km观测高差为单位权观测值,其数字计算列于表
(1)单位权中误差为
0 km
5
pidi2
i 1
2n
92.5 3.0mm 10
(2)第二段观测高差的中误差为
2 0
1 3.0 3.2 5.4mm p2
(3)第二段高差平均值的中误差为
L2
2
2 0 2 L
2 0
( 2 n)
n
2 0 2
np
所以每次丈量10km的距离的权为:
p10
pL n
5 10
0.5
长度为
S i 的距离的权为:Pi
C Si
P10
C 10
C 5
P2.5
C 2.5
2
σ02=Cσ2KM
本题演算中是以5km距离一次丈量 中误差作为单位权中误差的。
n),
它们的方差为
2 i
,
如选定任一常数
,则定义
0
:
pi
2 0
2 i
称为观测值Li的权。权与方差成反比。
p1 : p2 :
pn
2 0
12
:
2 0 2 2
:
:
2 0 2 n
1
2 1
:
1
2 2
:
:
1
2 n
一、权与定权的常用方法
例:已知km ,1 2km ,2 4km ,3 3km ,
一、权与定权的常用方法
2、单位权中误差
令σi=σ0,则得:
Pi
2 0
2 i
2 0
2 0
1
0称为单位权中误差,权等于1的观测值称为单位权观测值。
一、权与定权的常用方法
例:在图中水准网中,在认为每公里观测值高差的精 度相同的前提下,确定各条路线的权
S1=1.0km S2=2.0km S3=4.0km S4=8.0km
设每公里观测值高差的方差为 σ2公里 ,各水准路线的方差为
σ12=S1σ2公里 σ22=S2σ2公里 σ32=S3σ2公里
令: σ02=σ12 按权的定义各路线观测值的权为
σ42=S4σ2公里
σ02=σ42 ???
P1=1.0, P2=0.5, P3=0.25, P4=0.125
一、权与定权的常用方法
2 由改正数计算中误差
在进行n次观测时,求得观测值的改正数V=[v1 v2 … vn ]T之后,进而可求得中误差
(1)当n有限时,等精度观测的情况下,单位权中误差估值为
0
vv
n 1
白塞尔公式
(2)若是不等精度观测,而且观测对象不止一个而是t个的情 况下,单位权中误差估值为:
0
pvv
一、权与定权的常用方法
例1:设对丈量10公里的距离,同精度丈量10次,令其平 均值的权为5,每次丈量10公里的权为多少?现以同样等 级的精度丈量2.5公里的距离。问丈量此距离一次的权是 多少?在本题演算中是以几公里的丈量中误差作为单位 权中误差的?
解:由同精度观测值的算术 平均值的基本公式得
pL
二、单位权中误差的计算
1 由真误差计算中误差
设观测值为Li,i=1,2,…,n;数学期望为u,观测
的真误差为 i ,并且服从正态分布,
(1)等精度观测的情况下,单位权中误差估值为:
0
n
(2)不等精度观测的情况下,单位权中误差估值为:
0
p
n
二、单位权中误差的计算
ˆ
1 3
ˆ
3n
菲列罗公式
3 由三角闭合差求测角中误差
例1:对一三角形的三个角进行了九组同精度 的观测,各组观测值是对各角分别观测四回的平均 值,得到三角形闭合差为:
2.5 1.5 3.5 3.5 2.5 0.5 5.5 2.5 2.5
设对量X1,X2,…Xn各观测两次,得独立观测值为:
L1' , L'2 , , L'n L1'' , L'2' , , L'n'
双观测差数为: d L'i L'i'
又设同一对观测时等精度的,不同的观测对精度不同,且 各观测对的权为
求单位权中误差?
4 由双观测值之差计算中误差
一对观测的差数为:
经检验,各闭合差包含有系统性的常误差 0.5
1、求这组闭合差的中误差; 2、各角观测值的中误差; 3、每测回观测值的中误差
3 由三角闭合差求测角中误差
解:1)由于包含系统误差,故偶然误差 i 为:
2.0 2.0 4.0 3.0 3.0 1.0 5.0 2.0 3.0
若 0
2 km
则
p1 1, p2
2, 4
p3
2 3
若 0
4 km
则
4 p1 2, p2 1, p3 3
一、权与定权的常用方法
1)权的大小随02 而变化,但权比不会发生变化。 2)选定了02,即对应了一组权。 3)权是衡量精度的相对指标,为了使权起到比较精 度的作用,一个问题只选一个0。 4)权可能有量纲,也可能无量纲,视0和i的单位而 定。 5)方差之间比例关系的数字特征。
3、测量上确定权的常用方法举例
(1)同精度独立观测算术平均数的权
L
1 n
(
L1
L2
Ln )
p
2 0 2
2 L
1 n
2
(
2 1
2 2
2 n
)
1
2
n
2
n
12
n
pL
2 0 2
L
2 0
( 2 n)
n
2 0 2
np
2
3.8mm
(4)全长一次观测高差的中误差为
5
全 0 Si 3.0 15.2 11.7mm i 1
差数的真误差为:
按权倒数传播律可得差数的权为:
1 11 2
pdi pi pi pi
pdi
pi 2
用不等精度观测的真误差计算单位权中误差估值为:
可得
ˆ0
pd d d n
p dd 2
n
pdd
2n
4 由双观测值之差计算中误差
观测对之差的单位权中 误差为
0
pd dd
由2=[n]
81 9
9
则这组闭合差的中误差为:
3
2) 由于2=32L