哈工大机械原理课程设计_棒料7
哈工大机械设计课程设计四篇

哈工大机械设计课程设计四篇(2个积分)哈工大的学弟学妹们:你们好,作为哈工大的一员,知道哈工大的功课很累。
所以我特地把我们寝室四人的机械设计课程设计上传到网上,方便你们参考。
但是不要抄袭,这是锻炼能力的很好机会。
而且,作为工大人,知道你们为了下载文档很纠结。
所以这次四篇文档只要2个积分。
第一篇目录一、传动装置的总体设计 (3)1.设计数据及要求: (3)2.传动装置简图: (4)(二)选择电动机 (4)1.选择电动机的类型 (4)2.选择电动机的容量 (4)3.确定电动机转速 (5)(三)计算传动装置的总传动比 (5)1.总传动比i (5)2.分配传动比 (6)(四)计算传动装置各轴的运动和动力参数 (6)1.各轴的转速 (6)2.各轴的输入功率 (6)3.各轴的输出转矩 (6)二、传动零件的设计计算 (7)(一)高速齿轮传动 (7)1.选择材料、热处理方式及精度等级 (7)2.初步计算传动主要尺寸 (7)3.计算传动尺寸 (9)(二)低速速齿轮传动(二级传动) (11)1.选择材料、热处理方式及精度等级 (11)2.初步计算传动主要尺寸 (11)3.计算传动尺寸 (13)(三)验证两个大齿轮润滑的合理性 (16)(四)根据所选齿数修订减速器运动学和动力学参数。
(16)1.各轴的转速 (16)2.各轴的输入功率 (16)3.各轴的输出转矩 (17)三.轴的设计计算 (17)(一)高速轴(轴Ⅰ)的设计计算 (17)1.轴的基本参数--Ⅰ轴: (17)2.选择轴的材料 (18)3.初算轴径 (18)4.轴承部件的结构设计 (18)5.轴上键校核设计 (20)6.轴的强度校核 (20)7.校核轴承寿命 (23)(二)中间轴(轴Ⅱ)的设计计算 (24)1.轴的基本参数--Ⅱ轴: (24)2.选择轴的材料 (24)3.初算轴径 (24)4.轴承部件的结构设计 (25)5.轴上键校核 (26)7.校核轴承寿命 (30)(三)输出轴(轴Ⅲ)的设计计算 (31)1.轴的基本参数--Ⅲ轴: (31)2.选择轴的材料 (31)3.初算轴径 (31)4.轴承部件的结构设计 (32)6.轴的强度校核 (33)7.校核轴承寿命 (36)(四)整体结构的的最初设计 (37)1.轴承的选择 (37)2.轴承润滑方式及密封方式 (38)3.确定轴承端盖的结构形式 (38)4.确定减速器机体的结构方案并确定有关尺寸 (38)四.设计参考文献: (39)一、传动装置的总体设计(一)设计题目课程设计题目:带式运输机传送装置1.设计数据及要求:设计的原始数据要求:F=1900N ; d=250mm ; v=0.9m/s机器年产量:大批量; 机器工作环境:有尘;机器载荷特性:平稳;机器最短工作年限:5年2班。
哈工大机械原理课程设计棒料输送线布料装置(方案8)
机械原理课程设计题目棒料输送线布料装置(方案8)专业学号学生指导教师一、棒料输送线布料装置使用功能描述已知技术参数和设计要求:如下图1所示棒料输送线布料装置的功能简图。
料斗中分别装有直径35mm,长度150mm的钢料和铜料。
在输送线上按照图2所示的规律布置棒料。
原动机转速为1440rpm,每分钟布置棒料40,75,90块,分3档可以调节。
二、工艺动作分析有设计要求可知,该棒料输送线布料装置需要由四个部分共同构成,各原动件为皮带轮(主动轮)、曲柄、槽轮1和槽轮2,由此绘制出机械运动循环图。
图3 棒料输送线布料装置运动循环图总时间为T ,表示构件完成一个运动循环所用总时间。
皮带轮做间歇转动,输出皮带做间歇移动;曲柄做间歇整周回转,带动滑块往复直线移动。
皮带与曲柄滑块的周期是槽轮的的五分之一左右。
三、运动功能分析根据前面的分析可知,槽轮1,2工作的执行机构应该具有的运动功能如图4所示。
运动功能单元把一个连续的单向传动转换为间歇转动,由题意知要求达到的转速分别为18rpm ,15rpm ,8rpm图4 槽轮1,2的运动功能由于电动机的转速为1440rpm ,为了分别得到18,15,8rpm 的转速,则由电动机到槽轮之间的总传动比z i 有3种,分别为1114408018z n i n === 2214409615z n i n === 3314401808z n i n === 总传动比由定传动比c i 和变传动比v i 两部分构成,即11v c z i i i =22v c z i i i =33v c z i i i =3种总传动比中1z i 最小,3z i 最大。
由于定传动比c i 是常数,因此,3种变传动比中1v i 最小,3v i 最大。
由于槽轮机构与皮带机构不在同一平面上,需采用一个圆锥齿轮,传动比为i d图5 圆锥齿轮运动功能 取i d =4,即Z12 = 20,Z13 = 81由设计图纸,为了完成传动和合理输出,令601=c d i i则定轴传动比为15而33.1608011===c z v i i i 6.1609622===c z v i i i 36018033===c z v i i i 于是,传动系统的有级变速功能单元如图6所示。
哈工大机械原理大作业凸轮07(可打印修改) (2)
f=linspace(0,2*pi,200); for n=1:length(f)
k1=subs(abs((tx1*yxx1-txx1*yx1)/(tx1^2+yx1^2)^1.5),{x1},{xx1}); v=[v,1/k1]; end
精品内容
s2=70; t2=(s2+s0).*cos(x2)-e*sin(x2); y2=(s0+s2).*sin(x2)+e*cos(x2); tx2=diff(t2,x2); txx2=diff(t2,x2,2); yx2=diff(y2,x2); yxx2=diff(y2,x2,2); for xx2=(pi/3):(pi/100):(175*pi/180);
k3=subs(abs((tx3*yxx3-txx3*yx3)/(tx3^2+yx3^2)^1.5),{x3},{xx3}); v=[v,1/k3]; end
s4=0; t4=(s4+s0).*cos(x4)-e*sin(x4); y4=(s0+s4).*sin(x4)-e*cos(x4); tx4=diff(t4,x4); txx4=diff(t4,x4,2); yx4=diff(y4,x4); yxx4=diff(y4,x4,2); for xx4=(265*pi/180):(pi/100):(2*pi);
elseif f(n)>f01+fs1+f02 && f(n)<=f01+fs1+f02+fs2 s(n)=0; v(n)=0;
哈工大机械原理课程设计-棒料输送线布料装置方案3

Harbin Institute of Technology课程设计说明书课程名称:机械原理课程设计设计题目:棒料输送线布料装置(方案3)院系:班级:设计者:学号:指导教师:设计时间:目录机械原理课程设计任务书 (1)一、题目要求 (2)二、机械系统工艺动作分析 (2)三、机械系统运动功能分析 (2)四、系统运动方案拟定 (6)五、系统运动方案设计 (9)1、齿轮机构设计 (9)2、槽轮机构设计 (10)3、不完全槽轮机构设计 (10)4、带传动设计 (10)5、开关设计 (10)六、系统运动简图 (11)棒料输送线布料装置(方案3)一、题目要求已知技术参数和设计要求:棒料输送布料装置(方案3)功能描述如下图所示棒料输送线。
料斗中分别装有直径35mm ,长度150mm 的钢料和铜料。
在输送线上按照下图所示的规律布置棒料。
原动机转速为1430rpm ,每分钟布置棒料55,85,115块,分3档可以调节。
图1图2二、机械系统工艺动作分析由设计要求可知,该棒料输送线布料装置需要由三个部分共同构成,各执行构件为传送带轮、钢料料槽开关1和铜料料斗开关2,这三个构件的运动关系如图3所示。
传送带轮 运动 停止 运动 停止 运动 停止 运动 停止 运动 停止 运动 停止 运动 停止 运动 钢料料槽开关 运动运动 运动 运动 运动 运动 运动 运动 铜料料斗开关 运动 运动 运动 运动 运动 运动 运动 运动 表示开关继续运动且无棒料掉落,表示开关运动过程中有棒料掉落图3 棒料输送线布料装置运动循环图总时间为T ,表示构件完成一个运动循环所用总时间。
传送带轮做间歇转动,传送皮带做间歇移动;料槽开关做不间歇转动。
传送带轮的运动周期是料槽开关的三分之一左右。
三、机械系统运动功能分析根据前面的分析可知,槽轮1,2工作的执行机构应该具有的运动功能如图4所示。
运动功能单元把一个连续的单向传动转换为间歇转动,由题意知要求达到的输入转速分别为115rpm ,85rpm ,55rpm 。
哈工大机械专业课程设置
1 计算机实用基础考查必修
1 代数与几何考试必修
1 工科数学分析B 考试必修
1 工程图学考试必修
1 概率论与数理统计考查必修
1 工科数学分析B 考试必修
1 大学物理A 考试必修
1 工程图学考试必修
2 C语言程序设计考查必修
2 大学物理A 考试必修
2 大学物理实验A 考查必修
2 理论力学考试必修
2 电工学(电工技术)考试必修
2 机械原理课程设计考查必修
2 大学物理实验A 考查必修
2 工程训练(金工实习、机类) 考试必修2 材料力学考试必修
2 机械原理考试必修
2 机械设计CAD 考查必修
2 电工学(电子技术)考试必修
3 机械设计课程设计考查必修
3 认识实习考查必修
3 工程训练(电子工艺实习)考查必修3 计算机组成原理考试必修
3 机械设计考试必修
3 互换性与技术测量考试必修
3 金属工艺学考查必修
3 机械工程材料考试必修
3 机械系统计算机控制考试必修
3 机械制造装备设计考查必修
3 工程系统建模与仿真考查必修
3 检测与传感技术
3 机械制造技术基础考试必修
3 热工原理考查必修
3 液压传动考试必修
3 机电液系统控制考试必修
3 CAD/CAM技术基础考查必修
3 自动控制原理B 考试必修
4 生产实习考查必修
4 专业课程设计1 考查必修
4 毕业设计考查必修
4 数控技术考试必修
4 机械系统设计考试必修4 工业机器人技术考查必修4 专业课程设计2 考查必修4 毕业设计考查必修。
哈工大机械原理课程设计--棒料输送线布料装置
哈工大机械原理课程设计--棒料输送线布料装置(总20页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除Harbin Institute of Technology课程设计说明书(论文)课程名称:机械原理设计题目:棒料输送线布料装置(方案1)院系:机电工程学院班级:设计者:学号:1指导教师:王洪祥设计时间:哈尔滨工业大学目录1、题目要求 (4)2.题目解答 (4)(1)工艺动作分析 (4)(2)运动功能分析及运动功能系统图 (5)(3)系统运动方案拟定 (8)(4)系统运动方案设计 (12)1)带传动设计 (12)2)滑移齿轮传动设计 (13)3)齿轮传动设计 (16)4)槽轮机构设计 (17)5)不完全齿轮机构设计 (18)6)执行机构2,3的设计 (19)(5)运动方案执行构件运动时序分析 (20)(6)参考文献 (21)棒料输送线布料装置(方案1)1、题目要求如图下图1所示棒料输送线布料装置的功能简图。
料斗中分别装有直径35mm,长度150mm的钢料和铜料。
在输送线上按照图2所示的规律布置棒料。
原动机转速为1430r/min,每分钟布置棒料50,80,110块分3档可以调节。
图1图22.题目解答(1)工艺动作分析由设计题目和图1可以看出,推动输送带运动的是执行构件1,使钢料下落的是执行构件2,使铜料下落的是执行构件3,这三个构件的运动关系如图3所示。
T1 T1 T1 T1执行构件运动情况执行构件1运动停止运动停止运动停止运动停止执行构件2停止放料停止放料停止停止停止放料执行构件3停止停止停止放料停止停止停止停止T2、T3图3 棒料输送线布料装置运动循环图图3中T1是执行构件1的工作周期,T2是执行构件2的工作周期,T3是执行构件3的工作周期。
由图3可以看出,执行构件1是作间歇转动,执行构件2作间歇转动,执行构件3也作间歇转动,执行构件2和3的工作周期相等,且为执行构件1的3倍。
哈工大机械原理课程设计示范(棒料布料装置)
机械原理课程设计
一、题目的重述
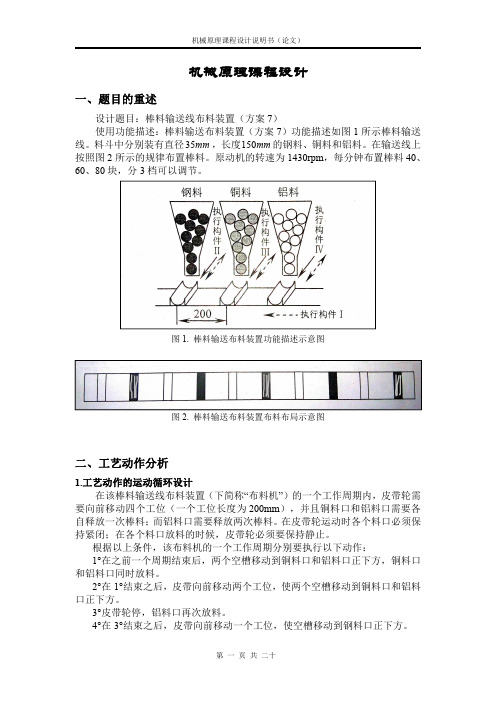
设计题目:棒料输送线布料装置(方案 7) 使用功能描述:棒料输送布料装置(方案 7)功能描述如图 1 所示棒料输送 线。料斗中分别装有直径 35mm ,长度150mm 的钢料、铜料和铝料。在输送线上 按照图 2 所示的规律布置棒料。原动机的转速为 1430rpm,每分钟布置棒料 40、 60、80 块,分 3 档可以调节。
图 9. 此布料机的原动机运动拟定方案
(2)一级减速及过载保护 一级减速及过载保护机构采用传动比为 2.5 的皮带轮与皮带,示意图如下:
图 10. 此布料机的一级减速机构及过载保护装置运动拟定方案
(3)二级减速及调速机构 二级减速及调速机构采用由三对滑移齿轮构成的滑移齿轮组,示意图如下:
第 八 页 共 二十 页
机械原理课程设计说明书(论文)
图 11. 此布料机的二级减速机构及转速调控装置运动拟定方案
(4)三级减速及运动分支点 三级减速及运动分支点采用一个定轴轮系加以实现,其示意图如下:
图 12. 此布料机的三级减速机构及运动分流装置运动拟定方案
(5)执行机构 I 规定运动的实现 4 中的运动分支点通过一个圆锥齿轮及其连轴曲柄-槽轮机构输出动力,再通 过与槽轮机构连轴的皮带轮进行传动,完成执行机构 I 规定的单向间歇直动工艺
图 1. 棒料输送布料装置功能描述示意图
图 2. 棒料输送布料装置布料布局示意图
二、工艺动作分析
1.工艺动作的运动循环设计 在该棒料输送线布料装置(下简称“布料机”)的一个工作周期内,皮带轮需
要向前移动四个工位(一个工位长度为 200mm),并且铜料口和铝料口需要各 自释放一次棒料;而铝料口需要释放两次棒料。在皮带轮运动时各个料口必须保 持紧闭;在各个料口放料的时候,皮带轮必须要保持静止。
哈工大机械原理课程设计
Harbin Institute of Technology课程设计说明书课程名称: ______ 机械原理课程设计______设计题目:棒料输送线布料装置(方案8)院系:机电工程学院班级:1208105设计者:殷琪学号:1120810529指导教师: _______________________设计时间: __________ 2014627哈尔滨工业大学14 目 录机械原理课程设计任务书 .......... . (1)一、 题目要求 ...................................................................... 2 二、 机械系统工艺动作分析 .......................................................... 2 三、 机械系统运动功能分析 .......................................................... 3 四、 系统运动方案拟定 .............................................................. 5 五、 系统运动方案设计 .............................................................. 8 六、系统运动简图•棒料输送线布料装置(方案8)一、题目要求已知技术参数和设计要求:棒料输送布料装置(方案8)功能描述如下图所示棒料输送线。
料斗中分别装有直径35mm长度150mm勺钢料和铜料。
在输送线上按照下图所示的规律布置棒料。
原动机转速为1430rpm,每分钟布置棒料40,75,90块,分3档可以调节。
W ■ II II II ■ ■ II II m團2心二、机械系统工艺动作分析由设计要求可知,该棒料输送线布料装置需要由三个部分共同构成,各执行构件为传送带轮、钢料料槽擒纵鼓轮1和铜料料斗擒纵鼓轮2,这三个构件的运动图3棒料输送线布料装置运动循环图传动带轮做间歇转动,停止时间约为进给时间的3倍,料槽擒纵鼓轮做持续转动,通过控制擒纵鼓轮的开口位置控制棒料按照需要的规律落料。
哈工大机械原理课程设计—棒料输送线布装置设计(方案4)

Harbin Institute of Technology课程设计说明书(论文)课程名称:机械原理课程设计设计题目:棒料输送线布料装置(方案4)院系:机电工程学院班级: 1008106班设计者:林君泓学号: 1100800130指导教师:刘福利设计时间: 2011.07.01-2011.07.05哈尔滨工业大学棒料输送线布料装置(方案4)1.题目要求如图下图1所示棒料输送线布料装置的功能简图。
料斗中分别装有直径35mm,长度150mm的钢料和铜料。
在输送线上按照图2所示的规律布置棒料。
原动机转速为1430rpm,每分钟布置棒料35,55,75块分3档可以调节。
功能简图2.题目解答(1)工艺方法分析由题目和功能简图可以看出,推动输送带上运动的是执行机构1,在使钢料下落的是执行构件2,在使铜料下落的是执行构件3,三个执行构件的运动协调关系如图所示。
下图1中T1为执行构件1的工作周期,T2是执行构件2的工作周期,T3是执行构件3的工作周期,T3是执行构件3的动作周期。
可以看出,执行构件1做间歇圆周运动,执行构件2、执行构件3都做间歇往复移动。
三个执行构件的工作周期关系为:4T1= T2= T3。
执行构件2、3的动作周期为其工作周期的1/8。
执行构件1的动作周期为其工作周期的1/2。
(2)运动功能分析及运动功能系统图根据前面的分析可知,驱动执行构件1工作的执行机构应该具有运动功能如图2所示。
该运动功能把一个连续的单向转动转换为间歇转动移动,从而带动皮带运动来带动传送带。
主动轮每转动半周,从动件(执行构件1)运动一周,主动件的转速分别为36、55、75 rpm 。
36、55、75 rpm图2 执行机构1的运动功能由于电动机转速为1430rpm ,为了在执行机构1的主动件上分别得到36、55、75 rpm 的转速,则由电动机到执行机构1之间的传动比i z 有3种分别为:i z1=143036= 39.7 i z2=143055= 26i z3=143075= 19总传动比由定传动比i c ,带传动比i p 与变传动比i v 组成,满足以下关系式:i z1 =i p * i c *i v1 i z2= i p *i c *i v2 i z3= i p *i c *i v3三种传动比中i z1最大,i z3最小。
哈工大机械设计课程设计设计说明书

机械设计课程设计目录目录一、传动装置的总体设计----------------------------------------11.1、确定传动方案-------------------------------------------------11.2、选择电动机---------------------------------------------------21.3、计算装置的总传动比并分配传动比-------------------------------41.4、计算装置各轴的运动和动力参数---------------------------------4二、传动零件的设计计算----------------------------------------62.1、高速齿轮传动-------------------------------------------------62.1.1、选择材料热处理级精度等级和齿轮类型及齿数---------------62.1.2、初步计算传动主要尺寸-----------------------------------62.1.3、确定传动尺寸-------------------------------------------82.1.4、校核齿根弯曲疲劳强度-----------------------------------102.1.5、计算齿轮传动其它尺寸-----------------------------------112.1.6、结构设计并绘制零件工作图-------------------------------112.2、低速级齿轮传动设计-------------------------------------------122.2.1、选择材料热处理级精度等级和齿轮类型及齿数---------------122.2.2、初步计算传动主要尺寸-----------------------------------122.2.3、确定传动尺寸-------------------------------------------132.2.4、校核齿根弯曲疲劳强度-----------------------------------152.2.5、齿轮其它几何尺寸---------------------------------------162.2.6、结构设计并绘制零件工作图-------------------------------162.3、验证两个大齿轮浸油润滑条件-----------------------------------172.4、根据所选齿数重新修订减速器运动和动力学参数-------------------18三、确定减速器机体的结构方案(草图准备)-------------------19四、装配草图设计前的准备工作(草图准备)-------------------204.1、初估轴径-----------------------------------------------------214.1.1、高速轴-------------------------------------------------204.1.2、中间轴-------------------------------------------------204.1.3、低速轴-------------------------------------------------214.2、选定联轴器类型-----------------------------------------------214.2.1、高速轴联轴器-------------------------------------------214.2.2、输出轴联轴器-------------------------------------------224.3、确定滚动轴承类型---------------------------------------------224.4、确定滚动轴承的润滑和密封方式---------------------------------224.5、确定轴承端盖的结构形式---------------------------------------23五、轴承部件的结构设计(草图第一阶段)---------------------235.1、高速轴的设计-------------------------------------------------235.1.1、轴承部件的结构设计-------------------------------------235.1.2、阶梯轴各部分直径的确定---------------------------------235.1.3、各部分轴段长度的确定-----------------------------------245.1.4、键连接的设计-------------------------------------------255.2、中间轴的设计-------------------------------------------------255.2.1、轴承部件的结构设计-------------------------------------255.2.2、阶梯轴各部分直径的确定---------------------------------255.2.3、各部分轴段长度的确定-----------------------------------265.2.4、键连接的设计-------------------------------------------275.3、输出轴的设计-------------------------------------------------275.3.1、轴承部件的结构设计-------------------------------------275.3.2、阶梯轴各部分直径的确定---------------------------------275.3.3、各部分轴段长度的确定-----------------------------------285.3.4、键连接的设计-------------------------------------------29六、轴/轴承/键连接的校核计算---------------------------------296.1、轴的强度校核-------------------------------------------------296.2、轴上键校核---------------------------------------------------336.3、轴承寿命校核-------------------------------------------------34七、传动零件/轴上其它零件/与轴承支点结构有关零件的结构设计(草图第二阶段)-----------------------------------------------367.1、齿轮结构设计-------------------------------------------------367.2、轴承端盖结构设计---------------------------------------------377.3、挡油板的结构设计---------------------------------------------387.4、套筒的结构设计-----------------------------------------------39八、机体结构的设计(草图第三阶段)--------------------------40九、减速器附件的设计(草图第三阶段)------------------------41十、参考文献----------------------------------------------------42。
哈工大机械原理课件

contents
目录
• 绪论 • 机构的结构分析 • 平面连杆机构 • 凸轮机构 • 齿轮机构 • 轮系 • 机械的平衡与调速
01
绪论
机械原理的研究对象
01 研究各种机械系统的运动规律和力的传递 关系。
02
研究各种机械系统中的机构、机器和机器 装置的设计、分析和综合方法。
03
常用的从动件运动规律有等速 运动规律、等加速等减速运动 规律、余弦加速度运动规律和 正弦加速度运动规律等。这些 运动规律各有特点,适用于不 同的工作场合和需求。
在设计从动件的运动规律时, 应考虑机构的传动性能、从动 件的受力情况、机构的动态响 应等因素,以确保机构在工作 过程中具有良好的稳定性和可 靠性。
平面机构的自由度计算
自由度是描述机构运动灵活性的参数,计算自由度可以判断机构是否具有确定的 运动状态。
平面机构的自由度计算公式为:F=3n-(2PL+Ph),其中n为活动构件数,PL为低 副数,Ph为高副数。
03
平面连杆机构
平面连杆机构的特点和基本类型
01
02
03
总结词
了解平面连杆机构的特点 和基本类型是掌握其工作 原理和应用的基础。
节气门调速
通过调节节气门的开度来控制进入发动机的空气 量,从而改变发动机的转速和功率。
离合器调速
通过控制离合器的接合与分离,实现发动机与传 动系统的结合与脱开,达到调速的目的。
变速器调速
通过改变变速器的传动比来改变输出轴的转速和 功率,实现调速。
机械的效率与节能
提高机械效率
通过优化设计、改善制造 工艺和加强维护保养,提 高机械系统的效率,减少 能量损失。
02
哈工大机械原理课程设计--棒料输送线布料装置(方案2)时越1130240511

棒料输送线布料装置(方案 2)
1、题目要求
如图下图 1 所示棒料输送线布料装置的功能简图。料斗中分别装有直径 35mm,长度 150mm 的钢料和铜料。在输送线上按照图 2 所示的规律布置棒料。 原动机转速为 1430r/min,每分钟布置棒料 45,75,105 块分 3 档可以调节。
图1
图2
2.题目解答
为保证系统过载时不至于损坏,在电动机和传动系统之间加一个过载保护环 节。过载保护运动功能单元可采用带传动实现,这样,该运动功能单元不仅具有 过载保护能力,还具有减速功能,如图 3 所示。
i=2.5
图 6 过载保护运动功能单元
整个传动系统仅靠过载保护运动功能单元不能实现其全部定传动比,因此, 在传动系统中还要另加减速运动功能单元,其减速比为
图 10 运动分支功能单元
由于减速输出的运动回转轴线与执行构件2、3的回转轴线垂直,因此增加如 图11的运动功能单元。该单元可用圆锥齿轮传动。由于分支部分不需要变速,故 圆锥齿轮的传动比为1。
i=1
图 11 相交运动功能单元
由于执行机构2和3的驱动机构是间歇转动,且将间歇转动转换为间歇往复直 线移动,所以应该添加如图13、图14所示的运动功能单元。
Harbin Institute of Technology
课程设计说明书
课程名称:机械原理 设计题目:棒料输送线布料装置(方案 2) 院 系:能源学院 班 级:1302405 设 计 者:时越 学 号:1130240511 指导教师:陈照波 设计时间:2015.7.--2015.7.11
哈尔滨工业大学
a’
86
α’
arccos(a×cosα/a')=20°
9
变位系数 齿轮 5
哈工大机械制造专业课程设计完美版

哈工大机械制造专业课程设计完美版哈尔滨工业大学1.零件的工艺性分析1.1拨叉的用途题目所给的零件是CA6140车床的拨叉。
它位于车床变速机构中,主要起换档,使主轴回转运动按照工作者的要求工作,获得所需的速度和扭矩的作用。
宽度为30mm 的面寸精度要求很高,因为在拨叉拔动使滑移齿轮时如果槽的尺寸精度不高或间隙很大时,滑移齿轮得不到很高的位置精度。
所以,宽度为30mm的面的槽和滑移齿轮的配合精度要求很高。
1.2拨叉的技术要求加工表面尺寸及偏差mm公差及精度等级表面粗糙度Ram形位公差mm拨叉左端面80 3.2拨叉上表面30 3.2 ∥0.1A花键小径φ22+0.021IT7花键大径φ25+0.021IT7 1.6 通槽上底面35 6.3通槽内侧面18+00.11 3.2⊥0.08A通槽下底面35 2×M8通孔φ8 φ5锥孔配件φ51.3审查拨叉的工艺性分析零件图可知,该拨叉形状、结构比较简单,通过铸造毛坯可以得到基本形状,减少了加工工序,又节约了材料。
除了拨叉上表面外,其余表面加工精度较低,不需要高精度机床加工,通过铣削、钻床等车床的粗加工就可以达到加工要求;而主要工作表面----拨叉上表面虽然加工精度较高,但也可以在正常的生产条件下,采用经济的方法保质保量的加工出来。
由此可以见,该零件的工艺性较好。
2.确定毛坯、绘制毛坯简图2.1选择毛坯零件的材料为HT200,灰铸铁生产工艺简单,铸造性能优良,考虑到零件需加工表面少,精度要求不高,有强肋,且工作条件不差,既无交变载荷,又属于间歇工作,故选用金属型铸件,以满足不加工表面的粗糙度要求及生产要求。
零件形状简单,因此毛形状需要与零件的形状尽量接近,又因内花键较小,因此不可直接铸出。
2.2确定毛坯尺寸公差和机械加工余量2.1.1 公差等级选取公差等级CT由《机械制造工艺设计简明手册》中表2.2-3可查得金属型铸造毛坯件的公差等级为7~9级,取为CT=9级。
棒料输送线布料装置
棒料输送线布料装置(方案7).(总16页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--H a r b i n I n s t i t u t e o f T e c h n o l o g y机械原理课程设计说明书课程名称:机械原理课程设计设计题目:棒料输送线布料装置(方案07)院系:英才学院班级:设计者:学号:指导教师:设计时间:哈尔滨工业大学棒料输送线布料装置(方案07)题目要求如图1所示棒料输送布料装置的功能简图。
料斗中分别装有直径35mm,长度150mm的钢料,铜料和铝料。
在输送线上按照图2所示的规律布置料棒。
原动机转速为1430rpm,每分钟布置棒料50,75,90块分3档可以调节。
图1-1图1-2图1功能简图题目解答一.工艺方法分析由题目和功能简图可以看出,棒料夹在执行构件1(即传送带)的带动下做间歇直线运动,棒料的输送机构分别为执行构件2(即钢料输送机构),执行构件3(即铜料输送机构),当执行构件1将棒料夹传送到指定位置时,执行构件按照一定的运动规律进行配合将钢料,铜料,铝料输送到指定位置。
下图中T1为执行构件1(传送带)的工作周期,T2是执行构件2(钢料输送机构)的工作周期,T3是执行构件3(铜料输送机构)的工作周期。
由图2可以看出,执行构件1是作间歇直线移动,而执行构件2,3做间歇往复直线运动。
四个执行构件的工作周期关系为:5T1=T2=T3。
执行构件2,3的动作周期为其工作周期的5倍。
执行机构运动情况1进动停止进动停止进动停止进动停止进动停止2休止后退前进后退前进3后退前进后退前进休止后退前进图2 运动循环图二.运动功能分析及运动功能系统图根据前面的分析可知,驱动执行构件1(皮带传动)工作的执行机构应该具有运动功能如图3所示。
该运动功能把一个间歇的单向转动转换为间歇的直线移动,主动件每转动一周,从动件(执行构件1)直线运动200mm,主动件的速度分别为35、60、85rpm。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Harbin Institute of Technology
课程设计说明书
课程名称:机械原理课程设计
设计题目:棒料输送线布料装置(方案8)院系:机电工程学院
班级:1208105
设计者:殷琪
学号:**********
指导教师:
设计时间:2014.6.27
哈尔滨工业大学
目录
机械原理课程设计任务书 (1)
一、题目要求 (2)
二、机械系统工艺动作分析 (2)
三、机械系统运动功能分析 (3)
四、系统运动方案拟定 (5)
五、系统运动方案设计 (8)
六、系统运动简图 (14)
棒料输送线布料装置(方案8)
一、题目要求
已知技术参数和设计要求:
棒料输送布料装置(方案8)功能描述如下图所示棒料输送线。
料斗中分别装有直径35mm,长度150mm的钢料和铜料。
在输送线上按照下图所示的规律布置棒料。
原动机转速为1430rpm,每分钟布置棒料40,75,90块,分3档可以调节。
二、机械系统工艺动作分析
由设计要求可知,该棒料输送线布料装置需要由三个部分共同构成,各执行构件为传送带轮、钢料料槽擒纵鼓轮1和铜料料斗擒纵鼓轮2,这三个构件的运动
传送带轮进
给
停止
进
给
停止
进
给
停止
进
给
停止
进
给
停止
钢料料槽擒纵鼓轮闭
合
落
料
闭合
落
料
闭合
铜料料斗擒纵鼓轮闭合
落
料
闭合
落
料
闭合
落
料
闭
合
传动带轮做间歇转动,停止时间约为进给时间的3倍,料槽擒纵鼓轮做持续转动,通过控制擒纵鼓轮的开口位置控制棒料按照需要的规律落料。
三、机械系统运动功能分析
由于电动机的转速为1430rpm ,为了分别得到85,60,35rpm 的转速,则由电动机到槽轮之间的总传动比i z 有3种,分别为
11143085z n n i == 221430n 60z n i == 33143035z n n i ==
总传动比由定传动比c i 和变传动比v i 两部分构成,即
11
v c z i i i =
22v c z i i i =
33v c z i i i =
令定轴部分传动比为 13i c
=
定轴传动比由一个齿轮轮系控制。
图4 齿轮轮系定轴传动单元
则变传动比部分传动比为
111430=1.29413*85z v c i i i =
= 221430=1.83313*60z v c i i i ==
331430=3.14313*35
z v c i i i ==
于是,传动系统的三级变速功能单元如图6所示。
图5 三级变速运动功能单元
由于动力输出与皮带机构不在同一平面上,需采用一个圆锥齿轮,传动比i d =1。
图6 圆锥齿轮变向功能单元
由于需要传送带进行间歇运动,本设计在圆锥齿轮后加入槽轮。
图7 槽轮间歇运动单元
本设计通过控制槽轮后的轮系控制传送带的转动方向、运动距离,利用皮带轮减小冲击对装置的影响,保护装置。
图8 传动带转动方向、距离控制轮系
由于要求传动带轮运动五次,料斗擒纵鼓轮运动一次,在设置带轮,在分运动的
为5。
同时调节速度,传动比i
d
图9 带轮分运动、调速功能单元
动力通过皮带轮同时输出到下料控制机构中,由于动力输出与下料控制系统不
均为1。
在同一平面上,钢料与铜料料斗均需采用一个圆锥齿轮,传动比i
d
图10 下料功能单元
本系统通过通过控制擒纵鼓轮的开口位置控制棒料按照需要的规律落料。
组合后的运动功能系统图,如图11所示。
图11 落料系统总图
四、系统运动方案拟定
根据图11所示的运动功能系统图,选择适当的机构替代运动功能系统图中的各个运动功能单元,便可拟定出机械系统运动方案。
图11中的运动功能单元1是原动机。
根据分度冲压机的工作要求,可以选择电动机作为原动机,如图12所示。
图12 电动机运动功能单元1
图11中的运动功能单元2是过载保护功能单元,可以选择带传动代替,如图13所示。
图13 皮带传动替代运动功能单元2
图11中的运动功能单元3是有级变速功能,可以选择滑移齿轮变速传动代替,如图14所示。
图14 滑移齿轮变速替代运动功能单元3
图11中的运动功能单元4是减速功能,可以选择定轴齿轮传动代替,如图15
图15 定轴齿轮传动代替运动功能单元4
图11中运动分支功能单元可用带传动代替。
如图16
图16 带传动替代运动功能单元11
图11中的运动单元6是转向功能兼减速功能,用圆锥齿轮代替,如图16
图16 圆锥齿轮代替运动功能单元6
图11中的运动单元7是将连续转动转换为间歇转动,可由槽轮机构实现,如图17
图17 槽轮机构代替运动功能单元7
图11中运动功能单元9用来调节速度和运转方向,可由轮系和皮带轮代替如图18
图18 定轴齿轮传动加带传动运动功能单元9
图11中运动功能单元10用来调节转动方向和分运动,可在一根杆上串联两个锥齿轮,如图19
图19 圆锥齿轮转动方向调节、分运动功能单元10
五、系统运动方案设计
1、齿轮机构设计
滑移齿轮具体齿数如下
滑移齿轮5和齿轮6
由滑移齿轮变速传动系统中对齿轮齿数的要求,
33.143
v
i ,齿轮5和6齿数分别取: z5 = 25,z6 = 78;它们的齿顶高系数ha*=1,径向间隙系数c*=0.25,分度圆压力角α=20°,实际中心距a =103mm。
滑移齿轮7和齿轮8
由滑移齿轮变速传动系统中对齿轮齿数的要求,
21.833
v
i ,可选择齿轮7和8为正传动高度变位齿轮,其齿数分别取: z7=36, z8=66;它们的齿顶高系数ha*=1,径向间隙系数c*=0.25,分度圆压力角α=20°,实际中心距a =102mm。
滑移齿轮9和齿轮10
由滑移齿轮变速传动系统中对齿轮齿数的要求,
11.294
v
i=,可选择齿轮9和10为正传动角度变位齿轮,其齿数分别取:z9=45,z10=58;它们的齿顶高系数ha*=1,径向间隙系数c*=0.25,分度圆压力角α=20°,实际中心距a =103mm。
定轴齿轮齿数:圆柱齿轮11与齿轮12 (齿轮13与14和齿轮11与12对应相同)
由定轴齿轮变速传动系统中对齿轮齿数的要求,13
d
i=,可大致选择齿轮11、12、
13和14为角度变位齿轮,其齿数分别取:z11 = 20,z12 = 72。
它们的齿顶高系数ha*=1,径向间隙系数c*=0.25,分度圆压力角α=20°,标准中心距a =92mm。
转速的误差在允许的范围内,故上述即可作为该轮系的设计方案。
2、槽轮机构设计
槽轮用来控制传送带的间歇运动。
如图20.
图20 标准四槽轮
3、擒纵鼓轮机构设计
擒纵鼓轮用来控制棒料的下落规律,可通过控制擒纵鼓轮的形状和相位进行有效控制。
如图21。
由于每个槽间的壁厚过小,使用加强筋以增加强度。
图21 擒纵鼓轮
4、传动皮带系统设计
皮带系统2、3、4传动比为1,所以,令皮带轮2、4的直径均为200mm。
皮带系统15、16、17传动比为5,所以,令皮带轮15的直径为40mm,皮带轮16的直径为200mm
5、定轴齿轮传动加带传动系统设计
槽轮固定在一个齿数为50的齿轮21上,再连接一个齿数为50的惰轮22,再连接一个齿数为50的齿轮23,齿轮23上固定一个半径为200/π的皮带轮24,传送带轮25半径为200/π,26半径为400/π。
序
号
项目代号计算公式及计算结果
1 齿数齿轮11 Z
21
50
齿轮12 Z
22
50
2 模数m 2
3 压力角ɑ 20°
4 齿顶高系数ha* 1
5 顶隙系数c*0.25
9 齿顶高齿轮15 1a h*
11
() 2.000
a a
h m h x mm
=+=
齿轮162a h*
22
() 2.000
a a
h m h x mm
=+=
10 齿根高齿轮15 1f h**
1() 2.400
f a
h m h c mm
=+=
齿轮162f h**
2() 2.400
f a
h m h c mm
=+=
11 齿顶圆直径齿轮15 1a d1111
2cos100.828
a a
d d h mm
δ
=+=
齿轮162a d2222
2cos100.828
a a
d d h mm
δ
=+=
12 齿根圆直径齿轮15 1f d1111
2cos96.606
f f
d d h mm
δ
=-=
齿轮162f d2222
2cos96.606
f f
d d h mm
δ
=-=
六、系统运动简图附CAD图一张
比例 5:1
棒料输送
布料装置7
班
比例 10:1
孟繁星。