悬臂斗轮机说明书..
悬臂式起重机安全操作规程
悬臂式起重机安全操作规程1. 引言本文档旨在为悬臂式起重机的操作人员提供一个安全、高效的操作指南,以确保起重机的正常运行,预防事故的发生。
操作人员应仔细阅读本规程,并按照规程执行操作。
2. 起重机操作前准备在进行起重机操作之前,操作人员应进行以下准备工作:2.1 检查起重机状态操作人员应仔细检查起重机的各个部件是否完好,包括起重机臂、吊钩、钢丝绳等。
如发现任何损坏或异常情况,应立即上报维修部门,并等待修复后再进行操作。
2.2 检查工作环境操作人员应检查起重机工作环境是否符合要求,包括地面平整度、通行道路畅通、天气条件等。
如发现不符合要求的情况,应采取相应的措施保证工作环境安全。
2.3 检查操作人员操作人员应确保自身具备合格的起重机操作证书,并保持身体健康状态,不得患有嗜酒、嗜烟等影响操作的习惯。
3. 悬臂式起重机操作流程本部分将介绍悬臂式起重机的操作流程,包括起重、平移、回转等操作。
3.1 起重操作1.操作人员应根据起重物的重量和大小,选择合适的吊钩和钢丝绳。
2.使用吊钩牢固地连接起重物,并确保起重物的重心位于吊钩的正下方。
3.操作人员通过控制器操纵起重机的升降机构,使起重物平稳抬升至指定高度,并确保其水平方向平稳。
3.2 平移操作1.在起重操作完成后,操作人员通过控制器操纵起重机的平移机构,将起重物沿水平方向平稳移动至目标位置。
2.在移动过程中,操作人员应留意周围环境,确保起重物不会与障碍物碰撞。
3.3 回转操作1.在起重和平移操作完成后,操作人员通过控制器操纵起重机的回转机构,使起重物绕纵向轴心旋转至目标位置。
2.在回转操作过程中,操作人员应保持动作平稳,避免突然变化引起起重机的不稳定。
3.4 其他操作注意事项1.操作人员在进行操作时,应时刻注意起重机的动态变化,确保操作平稳安全。
2.在起重物放置完毕后,应及时降低起重机的臂和吊钩,将其恢复至初始位置,以避免影响机器的稳定性。
4. 安全事故应急处理措施在起重机操作过程中,如果发生安全事故,操作人员应果断采取以下应急处理措施:1.立即停止操作,并按照事故应急预案进行处理。
三一EBZ200悬臂式掘进机使用说明书

EBZ200悬臂式掘进机使用说明书三一重型装备有限公司二O一O年三月(V1.3)EBZ200悬臂式掘进机使用说明书目录序言 (1)特别提示 (2)重要安全事项 (3)第一章产品资料 (6)第1节概述 (7)第2节主要结构 (9)第3节技术特性 (15)第二章产品使用操作 (18)第1节安装调整 (19)第2节作业操作 (20)第3节运输贮运 (24)第三章产品技术保养 (31)第1节保养维修 (32)第2节注油 (36)第3节 操作维护保养程序 (42)第4节 截割减速机维护保养规程 (48)第5节 伸缩部轴承维护保养规程 (50)第四章 故障分析与排除 (51)第五章 选配件 (58)序言衷心感谢您选用EBZ200悬臂式掘进机,我们将为您提供优质的产品和星级的售后服务。
我公司吸取国际上掘进机的技术精髓,集长期从事煤炭机械设计和制造的经验而研制的EBZ200悬臂式掘进机,该机适用于煤巷或半煤岩巷以及软岩的巷道掘进,也可在铁路、公路、水力工程等隧道中使用。
本使用说明书向您详细介绍了EBZ200悬臂式掘进机的技术特点、性能参数、工作原理、结构组成、安全操作、保养维修等各方面的内容。
为了使机器长期保持性能、防止故障及事故的发生,必须按照规定进行操作、维护检测、故障诊断和修理作业。
请您在操作前仔细地阅读本说明书。
这将会:——帮助您了解本机器;——避免由于不适当操作而引起的机器故障;——增加机器的可靠性;——延长机器的使用寿命;——减少修理费用和停机时间。
要保证本说明书象工具箱里的工具一样伸手可得,以便能够随时阅读。
只有完全了解说明书的内容,您才能熟练而安全地操作机器。
三一重型装备有限公司特别提示:请您精心维护和正确使用EBZ200悬臂式掘进机,对于违反下列规定而造成的后果,三一重装无义务承担责任:1.使用掘进机前,务必仔细阅读本说明书,并按所述要求进行操作;2.应按本说明书所规定的范围内使用掘进机,不得随意另作它用;3.操作人员必须是经过培训的熟练工人。
[机械毕业设计论文]悬臂式斗轮堆取料机设计说明书[管理资料]
![[机械毕业设计论文]悬臂式斗轮堆取料机设计说明书[管理资料]](https://img.taocdn.com/s3/m/cc7786fd4a7302768f993975.png)
目录1 概述 (1)斗轮堆取料机简介 (2) (3) (4) (5) (8) (9)2 总体设计 (11) (11) (11) (12) (12) (13) (13) (13) (13) (13)Z (14)a (14) (14)Vc (15)3 部件设计 (16) (16) (16) (18) (19) (20)25如需要图纸等资料,联系QQ1961660126 如需要图纸等资料,联系QQ1961660126如需要图纸等资料,联系QQ1961660126 (29) (29)回转机构设计 (32) (35) (38) (40) (41) (41) (42) (45) (46) (47) (48) (48) (48) (48) (49)4 悬臂式斗轮取料机的控制系统设计 (53) (53) (56)控制工作原理 (57)控制过程简介 (57)传感器选用 (57)总结 (59)参考文献 (60)附录 (61)致谢 (64)摘要悬臂式斗轮取料机堆取料机械中的一种,它广泛应用于港口、内陆的散料场所,主要用于取煤和矿石。
悬臂式斗轮取料机主要由金属结构、臂式输送机、回转机构、行走机构、斗轮机构、润滑装置、电气系统和安全装置组成。
工作时,取料机沿着轨道行进,并能改变臂架的角度。
悬臂式斗轮取料机是由斗轮挖掘机发展而来,它能与堆料机和输送机一起组成自动运输系统,随着国民经济的快速发展,对取料机的需求也越来越大。
本文章主要是对斗轮机构和回转机构的设计,它们都是取料机的重要组成部分。
斗轮机构主要是通过销齿传动来驱动斗轮的转动,这种传动方式具有结构简单、加工容易、造价低、拆修方便的优点。
在回转机构中,关键是回转支承。
回转机构的工作原理是小齿轮与回转支承的大齿轮啮合来带动整个回转体的转动,所以本文章将对回转支承进行选型并对小齿轮进行设计。
本文还对相对于斗轮取料能力进行了输送机的选型。
因为悬臂式斗轮取料机比较容易实现自动控制,所以本文章采用PLC进行对取料过程的控制。
悬臂式斗轮机使用维护说明书
DQLZ1800/3600·35臂式斗轮堆取料机使用维护说明书(机械部分)A01200000SMA01200000使用维护说明书录目(示例)…………………………………………………11.用途和使用范围1...................................................2.主要技术规格与性能. 5.工作原理与结构特征. (3)12.操作规程…………………………………………………………4…………………………………………………15.维护与安全技术5………………………………………………………186.易损件目录197.滚动轴承目录……………………………………………………臂式斗轮堆取料机使用维护说明书页共19 第1 页1 用途和使用范围DQLZ1800/3600·35型斗轮堆取料机(以下简称本机)为连续散状物料堆取料设备,是港口码头贮料场堆取散状物料的现代化机械设备之一。
它与料场地面胶带输送机组成机械化贮料系统,使料场堆料和取料作业完全实现机械化与自动化。
该设备集堆料和取料功能于一身,也可独立进行堆料或取料操作。
它适用于环境温度在-10℃—45℃,平均相对湿度为78%,地震基本烈度(里氏)低于7级的大中型现代化散状物料贮料场的堆取料作业。
2 主要技术规格与性能2.1整机的主要技术要求本机是按照JB/T4149《斗轮堆取料机技术条件》等有关标准设计而成,产品技术指标完全达到有关标准和规定,满足用户的使用要求。
主机构为桔红;色标为(R05)黄色,配重为黑黄相间、防护栏杆为主机面漆颜色的斜道,间距为200mm,斜道与水平面呈45o;润滑油管为淡黄色。
各传动部分巳在厂内试装、试运转,经检查合格后出厂。
本机大型结构件所用钢材均巳进行预处理。
资料来源编制(签字)(日期)校对标准化审定提出部门准批日期字签更改文件号处数标记.A01200000使用维护说明书第页共页1922.2 整机性能2.2.1 工作制度和寿命:重型工作制,设计寿命30年2.2.2 物料特性品种: 铁矿石(粉)堆积密度: 2.2-2.8 t/m3静安息角:40°-45°动安息角:30°-35°—: 0 75mm粒度2.2.3 生产能力额定取料能力:1800 t/h额定3600 t/h堆料能力:4320t/h)(最大料堆高度2.2.48.5 m 轨上:1.5m轨下:35 m .5 回转半径:2.2供电系统2.2.6,50Hz 供电电压:10kV磁滞式电缆卷筒供电方式:磁滞式电缆卷筒控制方式:50Hz: 220V,控制供电电源320 m 走行距离:2.2.72 250 N/m最大工作风压:2.2.82 1890 N/m最大非工作风压:2.2.9420 kW 装机总功率:2.2.10: 360 kW 常用功率2.2.11 465t 设备总质量:2.2.12 ∽25 m×10.691.6×高):宽X设备外形尺寸(长2.2.13 X程控、手动,半自动PLC2.2.14 控制方式1300 mm2.2.15 地面带式输送机:理论中心高(距轨道踏面):A01200000使用维护说明书第页共页1932.3 主要部件的主要技术参数与性能2.3.1 斗轮机构斗轮型式:无格式斗轮直径: 6 m斗子数:8个斗轮转速: 4.9r/min机械传动传动型式:Y2-315S-4(110KW,1480r/min: 电动机,F级,IP54)247.07,减速机:SEW)P2O081NH+KF157AD8(减速比臂架带式输送机2.3.2普通槽形可逆式运行型式:垂直重锤式拉紧方式:Ⅱ(A)型托辊型式: DT B=1400 mm带宽:V=3.15 m/s 带速:机械传动传动型式:Y2-280M-4(90KW,1480r/min,F级,: 电动机IP54)(SEW减速器型号:MC3RLSF05)i=20减速器传动比: 2.3.3 俯仰机构单缸液压整体变幅机构型式:°—变幅范围:-12.5+4.3°两端球铰吊环式液压油缸接头形式:电动液压油泵传动型式:Y2-200L-4(30kW、: 电动机F级、IP54)— 8 mm/s油缸伸缩速度:02.3.4 回转机构机构型式:三排圆柱滚子轴承(带外齿圈): 35 m回转半径A01200000使用维护说明书第页共页194回转速度: 0.0625 —0.125 r/min回转角度: ±110°传动型式:机械传动YP160M2-4 X 2台(2×11kW, 1460 r/min,F电动机: 级,IP54)2.3.5 行走机构机构型式:组合悬挂式三点四支腿门座型式:7X跨距轴距: ×11 mΦ走行轮直径:630 mm个(含尾车前支腿轮数)主机轮数:24个12驱动轮数:工作V=7 m/min 行走速度: 、调车V=25m/min: <250 kN 最大轮压机械传动传动型式:三合一减速机自带:电动机:(12×5.5 kW, F 级,1480 r/min,IP54)2.3.6 尾车固定式尾车尾车型式:035托辊槽角:°12 尾车倾斜角度:带宽:1400 mm带速: 3.15 m/s电缆卷筒装置2.3.7磁滞式电缆卷筒动力供电方式:,:10KV动力供电电源50Hz夹轨器2.3.8型JYA160夹轨型式:电液式夹轨器×21.1 kW驱动电机功率:2.3.9 喷水装置抑尘型式:喷雾抑尘式A01200000使用维护说明书第页共页195系统压力:0.7 MPa2.3.10 润滑系统润滑方式:电动集中润滑2.3.11 控制设备PLC型号:S7-3003.工作原理及结构特征概述:本机由斗轮机构、臂架、臂架带式输送机、司机室装置、上部结构、俯仰机构、回转平台、回转机构、门座、行走机构、中心料斗、尾车、润滑系统、喷水降尘系统、电缆卷筒装置、走形限位装置、电气及辅助装置等部件组成(设备总图见附图)。
斗轮机使用、维护说明书
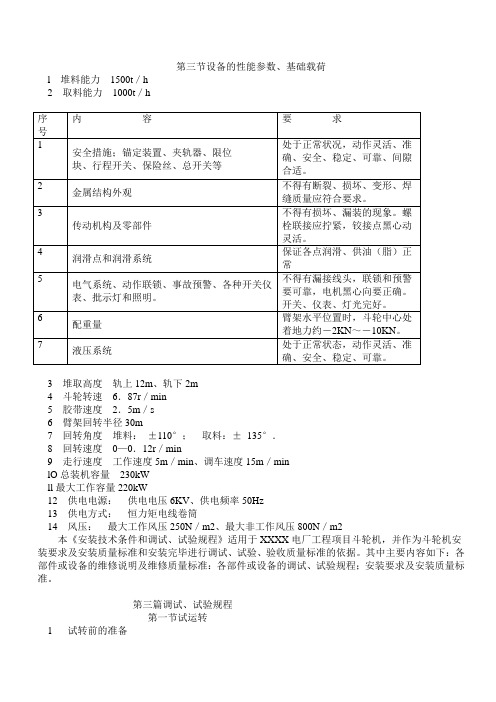
第三节设备的性能参数、基础载荷l 堆料能力1500t/h2 取料能力1000t/h3 堆取高度轨上12m、轨下2m4 斗轮转速6.87r/min5 胶带速度2.5m/s6 臂架回转半径30m7 回转角度堆料:±110°;取料:±135°.8 回转速度0—0.12r/min9 走行速度工作速度5m/min、调车速度15m/minlO总装机容量230kWll最大工作容量220kW12 供电电源:供电电压6KV、供电频率50Hz13 供电方式:恒力矩电线卷筒14 风压:最大工作风压250N/m2、最大非工作风压800N/m2本《安装技术条件和调试、试验规程》适用于XXXX电厂工程项目斗轮机,并作为斗轮机安装要求及安装质量标准和安装完毕进行调试、试验、验收质量标准的依据。
其中主要内容如下:各部件或设备的维修说明及维修质量标准:各部件或设备的调试、试验规程;安装要求及安装质量标准。
第三篇调试、试验规程第一节试运转1 试转前的准备1.1试运转前准备的内容与要求应符合下表2—l的规定:表2—l1.2按附录B的规定给各传动装置加油(脂)。
2电气系统试验2.1试验时应严格执行有关电气安全操作规程,接电前全面检查电气线路,其绝缘电阻必须大于10MQ以上。
先进行不带负荷的电气线路操纵试验,然后分别作各机构的带载试验。
2.2试验结果要求控制操纵正确、动作灵活、联锁、安全保护准确可靠。
照明线路畅通。
电机、电气元件与线路的温升不得超过允许值。
绝缘接地良好。
司机室仪表盘显示准确。
■第二节液压系统及集中润滑系统试验本机液压系统为主机变幅。
液压系统安装后,必须按规定进行调整和试验才能使用,具体操作见液压系统说明书。
液压简图如下,XXXX发电厂DQ800/1500.30斗轮堆取料机安装技术条件及调试、试验规程第三节空负荷试运转电气系统、液压系统检查、试验后,须进行不少于2小时的空负荷连续运转,项目和内容如下:1胶带输送机、尾车胶带机1。
悬臂式起重机操作规程
悬臂式起重机操作规程1 范围适用于本厂定柱式悬臂起重机操作维护保养2 规范性引用文件下列文件中的条款通过本标准的引用而成为本标准的条款,凡是注日期的引用文件,其随后所有修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。
凡是不住日期的引用文件,其最新版本适用于本版本。
3 操作规程3.1 操作者应由经过培训并考核合格,取得操作资格的人员来操作悬臂起重机。
3.2 操作者应熟悉起重机的构造、性能、操作方法,严禁超负荷使用。
3.3 操作者在使用前应检查确认启动按钮是否在停止位置,各电器、机械部分是否安全好用。
3.4 吊运工件前,应先开动空车,进行空负荷运转,并检查下列项目:3.4.1 按钮能否可靠的控制葫芦的升降和运行;3.4.2 运转时有无异常的声音和异味;3.4.3 钢丝绳能否在卷桶上正确缠绕。
当检查上述项无问题后,才能使用。
3.5 吊运工件时必须吊挂牢固平稳,吊运时应先点动按钮,使重物拉紧钢丝绳后再行起吊,看绳扣有无扣牢,使重物稍离地面,经试吊无问题后再吊运。
3.6 必须在垂直位置上起升重物,禁止斜拉斜吊。
3.7 在使用中发现制动器失灵而重物迅速坠落时,操作者应立即按上升按钮,使重物上升一段距离,再急速按下降按钮,使重物能以正常速度下降,然后在卸载后,请维修人员查明原因,不修好,绝对禁止使用。
3.8 吊装过程中,禁止吊装物从人头顶上越过,禁止任何人员处在吊装物正下方。
3.9 旋转吊装时不能猛烈拉动起重机手链,避免吊运过程中吊装物惯性失控。
3.9.1 禁止用电动葫芦将重物长时间悬挂在空中,以防零件发生永久变形。
3.9.2 要保持组合按钮的整洁和干燥,禁止手上带水时操作组合按钮。
3.9.3 限位开关是作为发生事故的保险装置,不应作为行程开关经常使用,更不得拆卸。
3.9.4 操作者在使用过程中如发现有异常现象,应停止使用并关闭总电源开关,通知维修人员查明原因,等待修复后再使用。
悬臂式斗轮堆取料机使用、维护说明书
There are interlocking protection among long travel drive, Slew unit, luffing unit, bucket wheel drive and boom conveyor etc transmission part (detailed information refer to the instruction in each Chapter/Section). Operator must read “Instruction” carefully and master daily operation and maintenance before starting to work; if operation is not proper, not only can reduce the service life of the equipment, but also can cause the accident.
B3DH09+1FAN i=25
Transmission ratio of reducer: 限矩型液力偶合器型号: Torque release fluid coupling type 制动器型号:
i=25 YOXⅡZ-500 YOXⅡZ-500 TE400/EB800/60
Brake type:
8m x7m
电动机功率:
8x11kW
Motor power:
8x11kW
斗轮机操作说明
斗轮机操作说明一、斗轮机系统操作前,首先进行系统保护和各机构检查,确认无误,才允许进行斗轮机操作。
(触摸屏没有报警信息)二、斗轮机系统因为没有和地面连锁,所以选择单机有效和旁路无效状态。
三、斗轮机系统低压分闸、合闸说明:1、合闸完成操作:先控制电源合闸,待指示灯亮后,再低压动力电源合闸(合闸闪烁),待3min后合闸指示灯亮。
2、分闸完成操作:先低压动力电源分闸(分闸闪烁),待分闸指示灯亮后,再控制电源分闸,直到控制电源合闸指示灯灭。
3、出现系统保护故障的分、合闸操作:系统保护的故障,将导致低压动力电源分闸。
如果触摸屏没有分闸操作,待故障解除并复位后,系统将延时3min后自动合闸。
(建议出现故障后,触摸屏选择分闸,待故障解除并复位后,重新进行合闸操作)四、斗轮机系统司机室、现场操作说明:1、司机室操作:选择取消远程操作。
2、现场操作:选择远程操作有效。
(选择前确保选择开关和操作杆在停止或零位状态)五、大车和尾车操作说明:前提条件:大车左右锚定打开、大车左右夹轨器打开。
1、当大车和尾车脱开情况操作:(已经挂上)(1)尾车选择在变幅状态,首先将尾车挂钩抬起,直到碰到左右挂钩抬起限位有效。
(2)当尾车脱钩大车前进允许有效,则可以操作大车前进。
A、尾车脱钩大车前进允许有效条件:尾车变幅的上停止有效或下停止有效司机室尾车选择在变幅工作状态司机室尾车挂钩选择在脱钩工作状态B、尾车左右挂钩抬起限位有效尾车脱钩大车前进允许无效条件:当大车前进碰到左右连接杆最大限位有效(任何一个)(3)当尾车脱钩大车后退允许有效,则可以操作大车后退。
A、尾车脱钩大车后退允许有效条件:尾车变幅的上停止有效或下停止有效司机室尾车选择在变幅工作状态司机室尾车挂钩选择在挂钩工作状态尾车左右挂钩抬起限位无效B、尾车脱钩大车后退允许无效条件:当大车后退碰到左右连接杆最小限位有效(同时)2、当大车和尾车挂上情况操作:(确保安全,请到现场检查是否挂上)(1)当尾车挂钩大车前进允许有效,则可以操作大车前进。
电气使用说明书

国电吉林江南热电有限公司DQ1500/1500.35悬臂式斗轮堆取料机电气系统使用说明书电气图号:DQ5918.9工程编号:15035-40长春发电设备有限责任公司二零零九年十二月审定:校核:编制:目录一.前言 (1)二.起动前的准备工作 (1)三.电源 (2)3.1上机电源 (2)3.2低压动力电源 (2)3.3低压控制电源 (2)四.电气系统的布置 (3)4.1电气室 (3)4.2司机室 (3)五.工作准备 (4)5.1锚锭抬起 (5)5.2高压电源合闸 (5)5.3控制电源合闸 (5)5.4动力电源合闸 (5)5.5夹轨器放松 (5)5.6控制方式选择 (5)六、斗轮机各机构控制 (6)6.1单动控制 (6)6.2联动控制 (10)6.3半自动控制 (13)6.4联锁控制 (15)6.5公用控制 (15)七.工作结束 (16)7.1夹轨器夹紧 (16)7.2动力电源分闸 (16)7.3控制电源分闸 (16)7.4锚锭落下 (17)八.操作安全注意事项 (17)8.1概述 (17)8.2操作注意事项 (17)8.3斗轮机在工作时需要检查注意项目 (18)8.4对于暴风的注意事项 (18)九.电气设备的维修与保养 (19)附录一:半自动取料工艺流程图 (21)附录二:半自动堆料工艺流程图 (22)一.前言1.1只有经过培训的专业操作人员才能操作本斗轮堆取料机。
1.2本斗轮机绝对不能在超过额定出力的情况下进行堆取料作业。
1.3禁止在斗轮机构未运转的情况下,悬臂碰撞料堆。
1.4禁止设备未停稳时进行重启动操作。
1.5上机高压电源带电时,禁止任何人员进入变压器室。
1.6本斗轮机司机在操作本机时应仔细观察,对于一些即使最细微的异常现象,怀疑可能会对本机造成危害,都应立即停止操作,并马上向有关人员通报。
(包括:异常声音或噪音、不正常的运转状态及相应反应、各种报警指示等)。
经检查确认并消除故障后,方可继续操作。
斗轮机安装说明

1.斗轮机构1.1斗轮机构安装在悬臂的最前端。
1.2采用采用“电机+偶合器+减速器”驱动。
1.3斗轮体为无格式结构;通过花键将斗轮轴与斗轮体连起来。
1.4为减少摩擦,斗子的两侧设计有后退角。
斗刃上焊有耐摩材料。
1.5溜料板与水平夹角约为600。
1.6衬板采用-12mm厚的16Mn衬板。
2.悬臂胶带机2.1悬臂胶带机运行方式为双向运行,并可满负荷起动。
2.2驱动装置安装在门柱上。
驱动装置采用机械外传动方式,即电机的动力经液力偶合器、减速器传给传动滚筒,运行胶带机。
驱动设制动器满足胶带最大逆止力要求。
2.3减速器为闭式结构,油浴润滑。
2.4 传动滚筒采用菱形铸胶滚筒,头部改向滚筒采用排渣滚筒,其余改向滚筒采用光面滚筒,所有滚筒壁厚不低于12mm。
2.5胶带采用阻燃NN200-1000x6(4.5+1.5)型。
托辊采用DTII型。
张紧采用重锤张紧。
上托辊间距不大于1200mm,下托辊间距不大于3000mm,受料点处设有缓冲托辊,间距不大于300mm。
上、下带面均设置调心托辊,全部托辊直径均为Ф108mm。
胶带承料面和非承料面均设有清扫装器。
胶带机上设置以下保护装置: 跑偏信号开关、双向拉绳开关、速度打滑检测开关、纵向撕裂开关、料流检测开关。
3.变幅机构3.1臂架变幅机构安装在门柱及平衡架之间。
3.2变幅机构为机械卷扬型式。
由电动机、减速器、制动器、卷筒、平衡梁等组成。
4.回转机构4.1 回转机构采用三排列轴承支承型式。
4.2回转驱动装置安装在门柱上,通过电机、减速器、驱动小齿轮与回转大轴承外齿啮合,驱动主机旋转。
4.3减速器为闭式行星传动,输入端小齿轮为锥齿轮传动,油浴润滑。
4.4电机和减速器用限矩联轴器连接,防止机构过负荷。
4.5按等量取料原理,采用半自动控制时回转速度自动调节变频调速。
4.6 制动器为电磁推杆型式。
5.行走机构5.1行走机构安装在门座支腿下部。
5.2 驱动装置经减速器将电机的动力传递给行走轮。
BZD定柱式悬臂起重机说明书

第 8 页 共 15 页
第 9 页 共 15 页
第 10 页 共 15 页
第 11 页 共 15 页
第 12 页 共 15 页
第 13 页 共 15 页
第 14 页 共 15 页
车运行往返二至五次,不准有异常发生。 3、负载试验 (1)起升额定载荷距地面 200mm 停留 10 分钟,连续进行三次后,将小车开到柱端,检查实际拱度, 悬臂梁上翘不得低于 (3/1000~1/1000) 悬臂总长。 (2)小车停在悬臂末端,起升额定负荷,测量下挠值,最大允许下挠不得大于 30mm,且柱子允 许有轻微摆动。
1160
第 5 页 共 15 页
三、安装
本机安装是用地脚螺丝将立柱固定在混凝土基础或钢结构基础上,基础必须满足整机稳定负载 时的最大倾覆力矩。 1、立柱安装
把立柱吊放在平正的地基上面,预制好的螺丝对准起重机地盘上的孔,把螺母拧上,然后进行 立柱的垂直调整,调整后拧紧螺母及锁紧螺母即可。 2、横梁安装
1400
自重
Kg
1000
1150
1350
3500
4500
第 3 页 共 15 页
2、外形尺寸 ⑴BZD0.5、BZD1 和 BZD2,见图 1 及表 2
型号
额定 起重量
BZD0.5 0.5
BZD1
1
BZD2
2
R
5000 3000
L1
5320 3900
L2
H
mm
4000
4050 4100
2300
4050
安装时,使立柱轴对准臂端转过孔,使滚轮靠在立柱的环形轨道上缓慢放下,待各部位就位后, 拧紧固定螺栓(见图 5),然后将供电集电环装在顶部伸出的轴端上(见图 6),最后用绳索牵动横 梁使其旋转一周,旋转时应转动灵活,无卡阻及异常现象。 (3)3~5T 旋转驱动机构安装
悬臂式斗轮机使用维护说明书

DQLZ1800/3600·35臂式斗轮堆取料机使用维护说明书(机械部分)A01200000SMA01200000使用维护说明书目录(示例)1.用途和使用范围 (1)2.主要技术规格与性能 (1)3.工作原理与结构特征 (5)4.操作规程 (12)5.维护与安全技术 (15)6.易损件目录 (18)7.滚动轴承目录 (19)2.2 整机性能2.2.1 工作制度和寿命:重型工作制,设计寿命30年2.2.2 物料特性品种: 铁矿石(粉)堆积密度: 2.2-2.8 t/m3静安息角: 40°-45°动安息角: 30°-35°粒度: 0 — 75mm2.2.3 生产能力取料能力:额定1800 t/h堆料能力:额定3600 t/h(最大4320t/h)2.2.4 料堆高度轨上: 8.5 m轨下: 1.5m2.2.5 回转半径: 35 m2.2.6 供电系统供电电压: 10kV,50Hz供电方式:磁滞式电缆卷筒控制方式:磁滞式电缆卷筒控制供电电源: 220V,50Hz2.2.7 走行距离: 320 m2.2.8 最大工作风压: 250 N/m22.2.9 最大非工作风压: 1890 N/m22.2.10 装机总功率: 420 kW2.2.11常用功率: 360 kW2.2.12 设备总质量:∽ 465t2.2.13 设备外形尺寸(长X宽X高):91.6×10.6×25 m 2.2.14 控制方式 PLC程控、手动,半自动2.2.15 地面带式输送机:理论中心高(距轨道踏面): 1300 mm2.3 主要部件的主要技术参数与性能2.3.1 斗轮机构斗轮型式:无格式斗轮直径: 6 m斗子数: 8个斗轮转速: 4.9r/min传动型式:机械传动电动机: Y2-315S-4(110KW,1480r/min,F级,IP54)减速机:P2O081NH+KF157AD8(减速比247.07,SEW)2.3.2 臂架带式输送机运行型式:普通槽形可逆式拉紧方式:垂直重锤式托辊型式: DTⅡ(A)型带宽: B=1400 mm带速: V=3.15 m/s传动型式:机械传动电动机: Y2-280M-4(90KW,1480r/min,F级,IP54)减速器型号: MC3RLSF05(SEW)减速器传动比: i=202.3.3 俯仰机构机构型式:单缸液压整体变幅变幅范围: -12.5°—+4.3°液压油缸接头形式:两端球铰吊环式传动型式:电动液压油泵电动机: Y2-200L-4(30kW、F级、IP54)油缸伸缩速度: 0 — 8 mm/s 2.3.4 回转机构机构型式:三排圆柱滚子轴承(带外齿圈)回转半径: 35 m回转速度: 0.0625 —0.125 r/min回转角度: ±110°传动型式:机械传动电动机: YP160M2-4 X 2台(2×11kW, 1460 r/min,F级,IP54)2.3.5 行走机构机构型式:组合悬挂式门座型式:三点四支腿跨距X轴距: 7×11 m走行轮直径:Φ630 mm主机轮数: 24个(含尾车前支腿轮数)驱动轮数: 12个行走速度: 工作V=7 m/min 、调车V=25m/min最大轮压: <250 kN传动型式:机械传动电动机:三合一减速机自带:(12×5.5 kW, F级,1480 r/min,IP54)2.3.6 尾车尾车型式:固定式尾车托辊槽角: 350尾车倾斜角度: 12°带宽: 1400 mm带速: 3.15 m/s2.3.7 电缆卷筒装置动力供电方式:磁滞式电缆卷筒动力供电电源: 10KV,50Hz2.3.8 夹轨器夹轨型式: JYA160型电液式夹轨器驱动电机功率: 2×1.1 kW2.3.9 喷水装置抑尘型式:喷雾抑尘式系统压力: 0.7 MPa2.3.10 润滑系统润滑方式:电动集中润滑2.3.11 控制设备PLC型号: S7-3003.工作原理及结构特征概述:本机由斗轮机构、臂架、臂架带式输送机、司机室装置、上部结构、俯仰机构、回转平台、回转机构、门座、行走机构、中心料斗、尾车、润滑系统、喷水降尘系统、电缆卷筒装置、走形限位装置、电气及辅助装置等部件组成(设备总图见附图)。
墙壁式悬臂起重机使用说明书
大连渤海起重墙壁式悬臂起重机安装维护使用说明书大连渤海起重机器股份有限公司一、用途墙壁式悬臂起重机广泛用于工矿、车间、装配线、仓库、码头等场合的轻小型重物吊运。
具有结构新颖、合理、简单、操作使用方便、回转灵活、自重轻、载荷移动灵活等优点,是节能高效的物料吊运装备。
二、结构概述墙壁式旋臂起重机(墙壁吊)由支架、旋臂装置、回转装置及电动葫芦(环链电动葫芦)等组成。
支架固定在墙壁或钢结构柱上,可根据用户需求进行回转,回转部分分为手动回转和电动回转。
电动葫芦(环链电动葫芦)安装在悬臂轨道上,用于起吊重物。
三、操作电器部分见附图:电气原理接线图,电器控制箱安装在电动葫芦(环链葫芦)上。
本机操作通过手柄控制按钮实现,分别控制起升、下降、电动葫芦小车的水平前后行走。
四、安装墙壁式悬臂起重机安装前,应检查运输途中是否引起的悬臂横梁弯扭变形、轴的锈蚀、碰伤等应分别进行校正或还原,另外每半年要对轴、轴承等转动零件进行清洗、润滑。
1. 悬臂梁安装悬臂梁安装,请按下列顺序进行。
1)在用户墙壁上或钢结构柱上按照图纸对应位置打孔。
2)吊车吊起主悬臂,用固定螺栓把悬臂与上下托板固定住,用水准仪测量上挠度,然后按顺时针方向拧紧转动轴上的螺母。
3)在悬臂横梁轨道上安装电动葫芦、行走小车以及回转装置。
4)将悬臂上所有电器进行电线连接安装,并留有长度适当的电源线。
五、注意事项:1. 如本机在室外安装使用时,需加装可靠的防雨措施。
2. 悬臂与支架装配后应做到装配后应做到①回转旋臂能围绕立柱180°灵活转动;②调整好调整垫片使悬臂端部达到上挠度F≥R/250(R为回转半径)。
3、操作时不得同时按下上升和下降按钮、同一电机的反正转按钮。
4、工作时,起重臂下禁止站人。
5、禁止拖拉重物。
6、禁止超负荷起吊。
悬臂式起重机安全操作规程范本

悬臂式起重机安全操作规程范本一、总则1.悬臂式起重机是进行生产作业的专业设备,操作人员必须经过专业培训和持证上岗方可操作。
2.悬臂式起重机操作人员必须严格按照本规程的要求进行操作,确保作业安全。
3.操作人员在操作前必须对悬臂式起重机进行检查,发现异常情况及时报修或报告。
二、安全防护措施1.确保悬臂式起重机周围的作业区域没有人员和障碍物,保证作业安全。
2.操作人员应按照操作手册要求正确佩戴安全帽、防护鞋、防护手套等个人防护用具。
3.操作人员禁止穿着松散衣物工作,以避免被起重物体绞住或勾住。
4.操作人员禁止穿戴耳机、耳塞等可能影响听觉的物品。
三、操作程序1.操作人员在操作前必须对悬臂式起重机进行充分检查,确保各项设备功能正常。
2.操作人员必须熟悉悬臂式起重机的启动、停止、升降、回转等操作程序,严禁随意操作。
3.操作人员在操作过程中必须注意悬臂式起重机的稳定性,严禁超载操作。
4.操作人员在操作过程中必须专心致志,禁止分心或与他人交谈。
5.操作人员必须按照悬臂式起重机的工作范围进行作业,严禁越界作业。
6.操作人员在操作过程中必须随时观察起重物体的摆动情况,及时调整悬臂式起重机的动作。
四、紧急情况处理1.如果发生突发情况,操作人员必须立即停止操作,并通过无线电或其他方式及时报告。
2.发生紧急情况时,操作人员要冷静处理,确保自身安全和周围人员的安全。
3.对于发生机械故障导致操作无法进行的情况,操作人员应立即报修或报告维修人员。
五、维护保养1.悬臂式起重机在使用过程中应定期进行维护保养,确保设备的正常运行。
2.操作人员在操作结束后,要进行设备的清洁和检查,确保设备的完好。
3.维修人员对悬臂式起重机进行维护保养时,必须按照操作手册和相关规定进行操作。
六、违规处理1.违反本规程的操作人员,将根据违规情况进行相应的处理,包括警告、记过、暂停操作资格等。
2.对于严重违规行为造成的事故,将依法追究相应的责任。
3.对于发现违规操作行为的人员,应及时向相关负责人或安全管理人员报告。
斗轮机使用、维护说明书

一概述DQL3000/1000.38斗轮堆取料机,是一种大型、连续、高效的散料装卸机械。
本设备具有单向堆料、单向取料及堆料分流功能。
可适用于堆、取粒度0~350 mm 的散状物料,是大中型火力发电厂、码头、矿山、冶金、化工等工矿企业的储料场专用堆取设备。
二主要技术参数1.生产能力:堆料能力:额定:3000t/h;最大:3600t/h取料能力:额定:1000t/h;最大:1200t/h分流能力: 1000t/h2.堆取料范围:料堆宽度:48m料堆断面形式:梯形料堆高度: 12m(轨面以上10.4m、轨面以下1.6m)3.斗轮机构:形式:单腹版、无格式斗轮斗轮直径:D=6200mm斗容:V=0.42m3斗数:Z=8个斗轮转速:n=7.58r/min驱动形式:侧置式机械驱动电动机型号:M2QA280S4A电动机功率:P=75kW4.俯仰机构:驱动方式:采用双作用双油缸,液压传动。
俯仰油缸参数:活塞直径D=280mm,活塞杆直径d=160mm,行程L=1900mm。
俯仰速度:V=3~5m/min(斗轮中心)俯仰角度:上仰+5°,下俯-15°。
系统工作压力:P≤21 MPa电动机型号:QA225M4A电动机功率:P=45kW5.回转机构:型式:转盘轴承支承方式回转半径:38m回转速度:0.03~0.126r/min回转角度:-110°~+110°驱动方式:机械传动、变频调速电动机型号:QABP160L4A电动机功率:P=2x15kW6.行走机构:驱动形式:侧置式轨距×轴距:7m×8.5m最大轮压:≤250kN轨道:50kg/m驱动方式:机械传动、变频调速。
行走速度:工作5m/min,非工作25m/min。
走行距离:~298m电动机型号:132M4电动机功率:P=14x7.5kW夹轨器形式:液压弹簧夹紧7.悬臂胶带机:运行方式:双向运行胶带型号:带宽:B=1800mm带速:v=3.5m/s槽角:35°托辊直径:φ159 mm张紧方式:液压式驱动形式:侧置式机械驱动电动机型号:QA315M4A电动机功率:132 kW8.尾车:固定单尾车8.1尾车胶带机:运行方式:单向运行带宽:B=1600mm带速:v=3.15m/s槽角:35°托辊直径:φ159 mm8.2电缆卷筒型式:恒力矩式型号:ERE 508541 01A8.3洒水除尘装置型式:水缆卷筒在线供水型号:ERE 508541 03A水箱容积:5 m3压力:0.5 MPa(设计压力1MPa)水质要求:工业用净水管径要求:Dg50接口位置:轨道外侧地面上水管电机功率:7.5kW (机上增压泵电机)8.4设备供电电压: 6000V频率: 50Hz8.5适应风速工作最大风速:20m/s夹轨器承受风速:35m/s设备可逆行风速:31m/s锚定状态承受风速:55m/s8.6全机总装备功率:450kW8.8整机质量:550t三斗轮堆取料机供货范围和技术文件1. 供货范围:DQL3000/1000.38斗轮堆取料机供货范围是:设备运行轨道以上主体部分、轨道终端止挡器、锚定座。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
斗轮堆/取料机设备简介二00六年五月目录1. 概论-堆/取料机的应用 (5)1.1 储料堆的布局(见基础图) (5)1.2 一般数据 (5)1.3 机器运动 (5)1.4 堆/取料机操作 (5)1.4.1 操作模式 (6)2. 技术数据 (6)2.1煤堆/取料机保证性能 (6)2.2 设计数据 (6)2.3一般的尺寸 (6)2.4电气数据 (6)2.5悬臂胶带机的运转数据 (7)2.6尾车和胶带机尺寸 (9)2.7机器俯仰运行数据 (9)2.8堆料机回转运行数据 (10)2.9堆料机行走数据 (11)3.大车行走驱动系统 (14)3.1 概论 (14)3.2 概论 (14)3.3 大车行走铁轨 (14)3.4 大车行走驱动器 (14)3.5 平衡器台车组 (15)3.6 夹轨器和风暴桩锁锭 (15)3.7 铁轨清洁器 (15)3.8 末端缓冲器 (15)4.门架 (15)4.1 门架主结构 (15)4.2 主通道 (15)5. 上部结构 (15)5.1 回转平台结构 (15)5.2 悬臂枢轴 (16)5.3 通道和平台 (16)5.4 液压站和润滑系统 (16)6. 回转系统 (16)6.1 概论 (16)6.2 回转轴承和齿轮 (16)6.3 回转驱动 (16)7.斗轮悬臂 (17)7.1 概述 (17)7.2 悬臂结构、支撑 (17)7.3 步道和平台 (18)8. 尾车 (18)8.1 门架 (18)8.2 尾车主平台 (18)8.3 尾车胶带机支撑结构 (18)8.4 尾车通道和人行道 (18)9. 胶带机系统 (18)9.1 概论 (18)9.2 胶带机驱动装置 (18)9.2.1概论 (18)9.2.2齿轮箱 (19)9.2.3包括弹性联轴节的液力偶合器 (19)9.2.4盘片式制动器 (19)9.2.5扭矩臂 (19)9.3 胶带机滚筒 (19)9.3.1驱动滚筒 (19)9.3.2尾滚筒 (19)9.3.3改向滚筒 (20)9.4 胶带机托辊 (20)9.4.1承载托辊 (20)9.4.2秤量托辊 (20)9.4.3缓冲托辊 (20)9.4.4回行托辊 (20)9.4.5反向托辊 (20)9.5胶带机皮带 (20)9.6 料槽 (21)9.6.1概论 (21)9.6.2中心料槽――尾车部分 (22)9.6.3挡板 (22)9.6.4中心料槽-支流部分 (22)9.7胶带机涨紧站 (22)9.8胶带清扫器 (22)9.9皮带称 (22)9.10安全装置 (22)10 冲洗和消防系统11. 液压系统 (23)12. 润滑系统 (23)13. 电气和控制系统 (23)1. 概论-堆/取料机的应用1.1 储料堆的布局(见基础图)两台带回转和俯仰悬臂的堆/取料机成线型布置,在两个产品煤堆之间不同的铁路轨道上平行运转。
堆/取料机通过堆/取料机的尾车,用料场的胶带机进料。
对于每一台堆/取料机,在堆料场的两端都提供维护间隔。
1.2 一般数据堆料方法大车行走,回转堆料尺寸m堆料高度12,4m1.3 机器运动不管以规定的速度堆煤所必须的速度如何,堆/取料机都将按照技术数据单上列举的运动速度。
机器将能同时回转,俯仰等运动(见技术数据单上的说明)。
1.4 堆/取料机操作供应用的变压器(如果需要)、机载电动机控制中心、机载PLC 控制系统软件、操作员的界面包、机器手动控制站、地方控制站、牵引电缆、中点终端盒、电缆回转导向装置、包括大车行走限位开关在内的所有的现场仪器。
2. 技术数据2.1 产品煤堆/取料机保证性能额定堆料设计能力3000 t/h( 最小连续生产量)最大堆料设计能力3600 t/h额定取料设计能力1500 t/h( 最小连续生产量)最大取料设计能力1500 t/h分流量1500 t/h 2.2 设计数据运转时的最大风速18 m/sec平均风速 2.5 m/ sec地震是的,按合同2.3 一般的尺寸悬臂达到的范围(尾车胶带机的中心到斗轮的中心)40,000 mm轨距(运行铁轨的中心到中心)8,000 mm运行铁轨尺寸50 kg/m运行铁轨标准中国标准大约. 25 m 整个高度(铁轨顶部到桅杆顶部,水平悬臂)悬垂平衡力(尾车胶带机的中心到平衡力的最远点,水平悬臂)18 m风暴拴系要求堆/取料机服务区要求悬臂风暴塔设备重量堆/取料机质量完整机器包括尾车和配重kg质量-不包括尾车kg质量-具体的配重kg2.4 电气数据供电电缆卷筒供电电缆长度大约320 m机器总的峰值功率安装功率大约 488.3 kW/kVA 2.5 悬臂胶带机的运转数据最大倾斜角度最大偏斜度皮带的宽度1,800 mm皮带的速度3,5 m/s驱动滚筒的直径mm驱动滚筒的表面宽度2,000 mm驱动滚筒的防护套橡胶材料驱动滚筒防护套的厚度mm非驱动滚筒的直径mm非驱动滚筒的表面宽度2000 mm非驱动滚筒的防护套橡胶材料非驱动滚筒防护套的厚度mm皮带数据皮带EP层数托辊数据制造厂商中国供应托辊滚动直径159 mm槽角45 degrees托辊轴承寿命(B10) 30.000 h托辊间距. mm回行托辊数据制造厂商中国供应托辊滚动直径159 mm结构-平的或V字形的V字形角度10 度托辊轴承寿命 (B10) 30.000 h托辊间距大约3,000 mm皮带装载运行mm皮带装载位置门柱区装载机构启动装载机构类型悬臂胶带机驱动器数据制造厂商电动机制造厂商额定功率160 kW额定转速1450 rpm电源Volts/Ph/Hz起动时限制扭矩增加方法(说明)通过带有迟滞箱的流体联轴节减速机类型螺旋状的斜角制造厂商缩减量1:16润滑方法飞溅润滑法制动器类型(鼓形/圆盘/圆锥)制造厂商型号和尺寸mmA 应用方法弹出断开方法l电动尾车胶带机运行数据皮带宽度mm 1,800 mm皮带速度, m/s 3,5 m/s 尾车主动滚筒滚筒直径mm滚筒表面宽度2000 mm防护套橡胶材料防护套厚度mm 尾车改向滚筒数量离开的滚筒直径mm滚筒表面宽度2000 mm防护套橡胶材料防护套厚度mm 传送托辊数据制造厂商中国供应图纸编号托辊滚动直径159 mm槽角35 度托辊间距mm 2.6 尾车和胶带机尺寸尾车主动滚筒的位置铁轨顶部到滚筒中心mm回转轴到滚筒中心mm料场传送带离地吗?压住装配到尾车上的滚筒吗?尾车行走数据行走轮空转轮数量车轮踏面直径630 mm车轮踏面宽度100 mm法兰外径680 mm车轮踏面材料和等级车轮踏面硬度托辊轮轴类型传动的轴承类型和尺寸球面滚柱– 24126轴承密封Taconite 型轴承润滑方法自动润滑系统轴承寿命 B10 30.000 h2.7 机器俯仰运行数据俯仰速度-在斗轮上最大 6 m/min最小0 m/min 斗轮、铁轨上的高度最大高度mm最小高度mm俯仰液压油缸油缸数量 2制造厂商型号油缸内径mm油缸冲程mm运行压力Mpa油缸安装阀制造厂商油缸安装阀类型歧管-用法兰连接的俯仰液压动力单元制造厂商Parker类型中国供应俯仰液压泵泵的数量 1制造厂商类型俯仰泵电动机驱动型电动机的数量电动机制造厂商电动机速度1450 rpm电动机架尺寸标准电源Volts/Phase/Hz 起动力矩Nm满载电流 A2.8 堆料机回转运行数据回转速度-在斗轮上最大36 m/min最小0 m/min回转环(轴承)制造厂商Rothe Erde类型滚柱/ 滚珠结合润滑方法自动润滑脂系统润滑剂EP 润滑脂环形齿轮和旋转枢轴轴承结构位置轴承外结构整体的回转驱动器回转驱动装置数量 2制造厂商电动机制造厂商最大需求动力kW额定动力输出(每个)kW额定速度0 – 1770 rpm电源Volts/Ph/HzIP 保护等级55减速机类型行星齿轮制造厂商Z型号和尺寸最大输出扭矩kNm运转率缩减量润滑方法飞溅油输出小齿轮(与环形齿轮啮合)模数mm齿数齿隙调节是齿隙调节方法偏心轮构架偏心+/- 1.5 mm超载系统安全离合器2.9 堆料机行走数据行走速度最小堆起操作0,05 m/s最大堆起操作0,50 m/s最大机器再布置0,50 m/s速度变量超范围了吗?驱动轮数量( 除去尾车)托辊数量( 除去尾车)行走轮mm 轮面直径630 mm轮面宽度100 mm法兰外径680 mm轮面材料和等级锻造的轮面硬度驱动轮轮轴类型传动的轴承类型和尺寸球面滚柱- 24126轴承密封taconite 型润滑方法自动润滑系统轴承寿命B1030.000 h 托辊轮轴类型传动的轴承类型和尺寸球面滚柱- 24126轴承密封Taconite型轴承润滑方法自动润滑系统轴承寿命 B1030.000 h 摩擦系数,轮对铁轨干铁轨, μ0.14湿铁轨, μ0.10夹轨器数量 2 离开的类型负载弹簧制造厂商型号和尺寸应用方法跳出松开方法液压的IP 保护等级IP 55行走驱动器制造厂商型号电动机数量14 离开的制造厂商最大需求动力(每个)7,5 kW额定动力输出(每个)7,5 kW额定速度0-1950 rpm构架尺寸电源IP 保护等级峰值功率总需求7,5 kW/kVA速度控制方法VVVF 控制减速机数量14 离开的类型斜伞齿轮制造厂商型号和尺寸缩减量129 ( 大约) :1润滑方法飞溅油制动装置数量14 离开的类型(鼓形/圆盘/圆锥形)盘式制造厂商型号和尺寸额定限制转矩(每个)100 ( 可调整的) Nm制动距离大约0.26 m应用方法跳出释放方法磁性的IP 保护等级行走缓冲器数量8制造厂商类型弹性缓冲器3. 大车行走驱动系统3.1 概论带有门架和三条腿的堆/取料机起落架,构成一个静定的三点支撑结构,并允许机器即使在铁轨高容限下也能平稳行走。
门架通过多个台车组系统支撑在它的拐角处,均匀地把负荷分配到每一个轮子和铁轨上。
一些轮子装有行走驱动器,为了机器沿着铁轨轨道运动。
机器沿着料场胶带机在铁轨上行走。
行走的速度是可变的,PLC按照技术数据控制一个适宜的速度。
为保护机器不跑出行走长度的末端,提供几个保护措施。
末端缓冲器安装到地基的结构上。
3.2 大车行走铁轨堆/取料机以及它的尾车被安装到一对大车行走的行车铁轨上,并沿着这铁轨行走。
大车行走行车铁轨的安装有一个倾斜度,如图纸所示。
容限包括堆/取料机要求的轨距规定(铁轨中心)、正直度、平行度、垂直、径向和横向的铁轨布置容限,它的尾车按照相关图纸的规定。
大车行走的车轮车轮安装到机器上,成组地安装到门架系统的每一个拐角处。
从动轮的每一个轮子上装有单独的驱动装置。
轮子单一带凸缘的,是用高合金钢锻造或铸造的。
所有的轴承和曲径连接到中心润滑系统上。
每个单个的轮子都要配有防止破裂的支撑。
3.3 大车行走驱动器每一个驱动器单元,都由一个直接用法兰连接到电动机上的螺旋伞齿轮单元组成,带有电磁多盘制动器。