第五章解线方程组的直接方法
数值分析课后习题与解答
课后习题解答第一章绪论习题一1.设x>0,x*的相对误差为δ,求f(x)=ln x的误差限。
解:求lnx的误差极限就是求f(x)=lnx的误差限,由公式(1.2.4)有已知x*的相对误差满足,而,故即2.下列各数都是经过四舍五入得到的近似值,试指出它们有几位有效数字,并给出其误差限与相对误差限。
解:直接根据定义和式(1.2.2)(1.2.3)则得有5位有效数字,其误差限,相对误差限有2位有效数字,有5位有效数字,3.下列公式如何才比较准确?(1)(2)解:要使计算较准确,主要是避免两相近数相减,故应变换所给公式。
(1)(2)4.近似数x*=0.0310,是 3 位有数数字。
5.计算取,利用:式计算误差最小。
四个选项:第二、三章插值与函数逼近习题二、三1. 给定的数值表用线性插值与二次插值计算ln0.54的近似值并估计误差限. 解:仍可使用n=1及n=2的Lagrange插值或Newton插值,并应用误差估计(5.8)。
线性插值时,用0.5及0.6两点,用Newton插值误差限,因,故二次插值时,用0.5,0.6,0.7三点,作二次Newton插值误差限,故2. 在-4≤x≤4上给出的等距节点函数表,若用二次插值法求的近似值,要使误差不超过,函数表的步长h 应取多少?解:用误差估计式(5.8),令因得3. 若,求和.解:由均差与导数关系于是4. 若互异,求的值,这里p≤n+1.解:,由均差对称性可知当有而当P=n+1时于是得5. 求证.解:解:只要按差分定义直接展开得6. 已知的函数表求出三次Newton均差插值多项式,计算f(0.23)的近似值并用均差的余项表达式估计误差.解:根据给定函数表构造均差表由式(5.14)当n=3时得Newton均差插值多项式N3(x)=1.0067x+0.08367x(x-0.2)+0.17400x(x-0.2)(x-0.3) 由此可得f(0.23) N3(0.23)=0.23203由余项表达式(5.15)可得由于7. 给定f(x)=cosx的函数表用Newton等距插值公式计算cos 0.048及cos 0.566的近似值并估计误差解:先构造差分表计算,用n=4得Newton前插公式误差估计由公式(5.17)得其中计算时用Newton后插公式(5.18)误差估计由公式(5.19)得这里仍为0.5658.求一个次数不高于四次的多项式p(x),使它满足解:这种题目可以有很多方法去做,但应以简单为宜。
数值分析Ch5.1
单位向量
k
定义2 u lk 0 0 mk1 mn ,v ek 0 1 0 0 ,
1,称E
(
l
k
,
e
k
,1)
k
I
lk
e
T k
Lk (lk )
指标为k初等下三角阵。
0
1
k
Lk (lk )
I
lk ekT
I
0
mk
1
0
k 1
0
0
1 mk1
1
k行,
mn
mn
1
1
0
1
I ij
。
1
0 Leabharlann 1 2.3 初等反射阵(称为境面反射阵或Householder变换)
1、定义
定义4 设向量 w Rn,且wT w 1(模或范数等于1), 2,
称矩阵 E(w, w,2) I 2wwT H (w) 为初等反射阵。 2、性质 定理2 设H (w) I 2wwT ,其中wT w 1 ,为初等反射阵,则
(1)H是对称阵,即 H T H;
(2)H是正交阵,即 H 1 H T ;
(3)设A为对称矩阵,那么A1 H 1 AH HAH 亦是对称阵。 证明:(1)H T (I 2ww T )T I 2(wT )T wT I 2wwT H;
(2)H T H HHT H 2 (I 2wwT )( I 2wwT )
1)
||2 ,
于是由定理3
存在H变换:
记
u
x
e1
w (u1 ,
|| u2
x e1 ,使 x e1 ||2
,, un )T,于 是
HxHyI12||2u||u||ue22u1|, T|22
计算方法课程教学大纲解答
计算方法》课程教学大纲课程编号:学时:54 学分:3适用对象:教育技术学专业先修课程:高等数学、线性代数考核方式:本课程考试以笔试为主70%,兼顾学生的平时成绩30%。
使用教材及主要参考书:使用教材:李庆扬. 《数值分析(第四版)》, 清华大学出版,2014 年。
主要参考书:1.朱建新,李有法. 《高等学校教材:数值计算方法(第3版)》,高等教育出版社,20122.徐萃薇,孙绳武. 《计算方法引论(第4版)》,高等教育出版社,2015 。
一课程的性质和任务计算方法是教育技术学专业学生的一门专业选修课。
作为计算数学的一个重要分支,它是数学科学与计算机技术结合的一门应用性很强的学科,本课程重点介绍计算机上常用的基本计算方法的原理和使用;同时对计算方法作适当的分析。
教学任务:通过本课程的学习,要使学生具有现代数学的观点和方法,并初步掌握处理计算机常用数值分析的构造思想和计算方法。
同时,也要培养学生抽象思维和慎密概括的能力,使学生具有良好的开拓专业理论的素质和使用所学知识分析和解决实际问题的能力。
二教学目的与要求教学目的:通过学习使学生了解数值计算方法的基本原理。
了解计算机与数学结合的作用及课程的应用性。
为今后使用计算机解决实际问题中的数值计算问题打下基础。
通过理论教学达到如下基本要求。
1.了解误差的概念2.掌握常用的解非线性方程根的方法3.熟练掌握线性代数方法组的解法4.熟练掌握插值与拟合的常用方法5.掌握数值积分方法6.了解常微分方程初值问题的数值方法三学时分配四教学中应注意的问题本课程是一门理论性较强、内容较抽象的综合课程,因此面授辅导或自学,将是不可缺少的辅助教学手段,教师在教学的过程中一定要注意理论结合实际,课堂教学并辅助上机实验,必须通过做练习题和上机实践来加深对概念的理解和掌握,熟悉公式的运用,从而达到消化、掌握所学知识的目的。
同时应注重面授辅导或答疑,及时解答学生的疑难问题。
五教学内容第一章绪论(误差)基本内容:第一节数值分析研究的对象和特点第二节数值计算的误差1.误差的来源与分类2.误差与有效数字3.数值运算的误差估计第三节误差的定性分析与避免误差的危害1.病态问题与条件数2.算法的数值稳定性3.避免误差危害的若干原则教学重点难点:重点:数值运算的误差估计难点:误差的定性分析与避免误差的危害。
第五章 解线性方程组的迭代解法
定义迭代法为: 定义迭代法为:
x ( k + 1) = G J x ( k ) + g
其中Jacobi迭代矩阵:GJ = D1 ( L + U ) 迭代矩阵: 其中 迭代矩阵
g = D 1b = (7.2, 8.3, 8.4)T 取 x ( 0 ) = (0, 0, 0)T , 代入迭代式,得x(1) = Bx ( 0 ) + g = (7.2, 8.3, 8.4)T x ( 2 ) = Bx (1) + g = (9.71,10.70,11.5)T x (9 ) = (10.9994,11.9994,12.9992) 精确解为 x = (11,12,13)T .
记
A = D L U
其中 D = diag (a11 ,, ann ) , L, U 分别为 A 的 严格下、上三角形部分元素构成的三角阵 严格下、上三角形部分元素构成的三角阵. Gauss-Seidel方法的矩阵形式为 方法的矩阵形式为
x ( k +1) = D1 ( Lx ( k +1) + Ux ( k ) + b)
或者
x ( k +1) = ( D L)1Ux ( k ) + ( D L)1 b
( 这说明Gauss-Seidel方法的迭代矩阵为 D L)1U 方法的迭代矩阵为 这说明
从而有
定理5.2 定理5.2 Gauss-Seidel方法收敛的充分必要条件为 方法收敛的充分必要条件为
ρ (GG ) < 1 或
数值分析课件 (第5、6章)
(1 ( La1n) b11) (2) (2) a L 2n b2 = A(3) : b(3) LM M (3) (3) Lamn bn
[
]
( ( ( aij3) = aij2) −mij a22) j (3) ( bi = bi(2) −mi2b22)
(i = 3,L m j = 3,L n) , ; , (i = 3,L m) ,
[
]
( ( ( aij2) = aij1) − mij a11) j (2) bi = bi(1) − mi1b(1) 1
研究生公共课程数学系列
(i = 2,L m j = 2,L n) , ; , (i = 2,L m) ,
机动 上页 下页 首页 结束
(2)
[A
(2)
: b(2)
]
(1 (1 a11) a12) (2 0 a22) = M M (2) 0 am2
(n)
续 述 程 到 成 s 消 计 。 继 上 过 , 直 完 第步 元 算
后 到 原 程 等的 单 程 A 最 得 与 方 组 价 简 方 组 (s+1) x = b,(s+1) 中( ) 上 形 其 A s+1 为 梯 。
(1 (1 (1 a11) a12) L a1n) (2 ( a22) L a22) n = O M (n ann)
( a2k ) k m = (k ) ik akk
(k (akk ) ≠0)
−−−−−→
(i=k+1,Lm) ,
(1 (1 ( a11) a12) L a11) k (2 ( a22) L a22) k O M (k akk ) M 0
计算方法各习题及参考答案
第二章 数值分析2.1 已知多项式432()1p x x x x x =-+-+通过下列点:试构造一多项式()q x 通过下列点:答案:54313()()()3122q x p x r x x x x x =-=-++-+. 2.2 观测得到二次多项式2()p x 的值:表中2()p x 的某一个函数值有错误,试找出并校正它.答案:函数值表中2(1)p -错误,应有2(1)0p -=.2.3 利用差分的性质证明22212(1)(21)/6n n n n +++=++ .2.4 当用等距节点的分段二次插值多项式在区间[1,1]-近似函数xe 时,使用多少个节点能够保证误差不超过61102-⨯. 答案:需要143个插值节点.2.5 设被插值函数4()[,]f x C a b ∈,()3()h H x 是()f x 关于等距节点01n a x x x b =<<<= 的分段三次艾尔米特插值多项式,步长b ah n-=.试估计()3||()()||h f x H x ∞-.答案:()443||()()||384h M f x H x h ∞-≤.第三章 函数逼近3.1 求()sin ,[0,0.1]f x x x =∈在空间2{1,,}span x x Φ=上最佳平方逼近多项式,并给出平方误差.答案:()sin f x x =的二次最佳平方逼近多项式为-522sin ()0.832 440 710 1.000 999 10.024 985 1x p x x x ≈=-⨯+-,二次最佳平方逼近的平方误差为0.122-1220(sin )())0.989 310 710x p x dx δ=-=⨯⎰.3.2 确定参数,a b c 和,使得积分2121(,,)[I a b c ax bx c -=++-⎰取最小值.答案:810, 0, 33a b c ππ=-== 3.3 求多项式432()251f x x x x =+++在[1,1]-上的3次最佳一致逼近多项式()p x .答案:()f x 的最佳一致逼近多项式为323()74p x x x =++. 3.4 用幂级数缩合方法,求() (11)x f x e x =-≤≤上的3次近似多项式6,3()p x ,并估计6,3||()()||f x p x ∞-.答案:236,3()0.994 574 650.997 395 830.542 968 750.177 083 33p x x x x =+++, 6,3||()()||0.006 572 327 7f x p x ∞-≤3.5 求() (11)xf x e x =-≤≤上的关于权函数()x ρ=的三次最佳平方逼近多项式3()S x ,并估计误差32||()()||f x S x -和3||()()||f x S x ∞-.答案:233()0.994 5710.997 3080.542 9910.177 347S x x x x =+++,32||()()||0.006 894 83f x S x -=,3||()()||0.006 442 575f x S x ∞-≤.第四章 数值积分与数值微分4.1 用梯形公式、辛浦生公式和柯特斯公式分别计算积分1(1,2,3,4)n x dx n =⎰,并与精确值比较.答案:计算结果如下表所示4.2 确定下列求积公式中的待定参数,使得求积公式的代数精度尽量高,并指明所确定的求积公式具有的代数精度. (1)101()()(0)()hh f x dx A f h A f A f h --≈-++⎰(2)11211()[(1)2()3()]3f x dx f f x f x -≈-++⎰ (3)20()[(0)()][(0)()]2h h f x dx f f h h f f h α''≈++-⎰答案:(1)具有三次代数精确度(2)具有二次代数精确度(3)具有三次代数精确度.4.3 设10h x x =-,确定求积公式12300101()()[()()][()()][]x x x x f x dx h Af x Bf x h Cf x Df x R f ''-=++++⎰中的待定参数,,,A B C D ,使得该求积公式的代数精确度尽量高,并给出余项表达式.答案:3711,,,20203020A B C D ====-,(4)6()[]1440f R f h η=,其中01(,)x x η∈.4.4 设2()P x 是以0,,2h h 为插值点的()f x 的二次插值多项式,用2()P x 导出计算积分30()hI f x dx =⎰的数值积分公式h I ,并用台劳展开法证明:453(0)()8h I I h f O h '''-=+. 答案:3203()[(0)3(2)]4h h I p x dx h f f h ==+⎰.4.5 给定积分10sin xI dx x =⎰(1)运用复化梯形公式计算上述积分值,使其截断误差不超过31102-⨯. (2)取同样的求积节点,改用复化辛浦生公式计算时,截断误差是多少?(3)要求的截断误差不超过610-,若用复化辛浦生公式,应取多少个节点处的函数值? 答案:(1)只需7.5n ≥,取9个节点,0.946I ≈(2)4(4)46111|[]||()|()0.271102880288045n b a R f h f η--=-≤=⨯ (3)取7个节点处的函数值.4.6 用变步长的复化梯形公式和变步长的复化辛浦生公式计算积分10sin xI dx x =⎰.要求用事后误差估计法时,截断误不超过31102-⨯和61102-⨯. 答案:使用复化梯形公式时,80.946I T ≈=满足精度要求;使用复化辛浦生公式时,40.946 083I s ≈=满足精度要求.4.7(1)利用埃尔米特插值公式推导带有导数值的求积公式2()()[()()][()()][]212ba b a b a f x dx f a f b f b f a R f --''=+--+⎰,其中余项为 5(4)()[](), (,)4!30b a R f f a b ηη-=∈. (2)利用上述公式推导带修正项的复化梯形求积公式020()[()()]12Nx N N x h f x dx T f x f x ''≈--⎰,其中 0121[()2()2()2()()]2N N N hT f x f x f x f x f x -=+++++ ,而 00, (0,1,2,,), i N x x ih i N Nh x x =+==- .4.8 用龙贝格方法计算椭圆2214x y +=的周长,使结果具有五位有效数字. 答案:49.6884l I =≈.4.9确定高斯型求积公式0011()()()x dx A f x A f x ≈+⎰的节点0x ,1x 及系数0A ,1A .答案:00.289 949x =,10.821 162x =,00.277 556A =,10.389 111A =.4.10 验证高斯型求积公式00110()()()x e f x dx A f x A f x +∞-≈+⎰的系数及节点分别为0001 2 2A A x x ===-=+第五章 解线性方程组的直接法5.1 用按列选主元的高斯-若当消去法求矩阵A 的逆矩阵,其中111210110A -⎛⎫ ⎪= ⎪ ⎪-⎝⎭. 答案: 1110331203321133A -⎛⎫ ⎪ ⎪⎪=- ⎪ ⎪⎪-- ⎪⎝⎭5.2 用矩阵的直接三角分解法解方程组1234102050101312431701037x x x x ⎛⎫⎛⎫⎛⎫⎪ ⎪ ⎪⎪ ⎪ ⎪= ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭ 答案: 42x =,32x =,21x =,11x =.5.3 用平方根法(Cholesky 分解法)求解方程组12341161 4.25 2.750.51 2.75 3.5 1.25x x x -⎛⎫⎛⎫⎛⎫ ⎪⎪ ⎪-=- ⎪⎪ ⎪ ⎪⎪ ⎪⎝⎭⎝⎭⎝⎭答案: 12x =,21x =,31x =-.5.4 用追赶法求解三对角方程组123421113121112210x x x x ⎛⎫⎛⎫⎛⎫ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪= ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭ 答案:42x =,31x =-,21x =,10x =.第六章 解线性代数方程组的迭代法6.1 对方程1212123879897x x x x x x x -+=⎧⎪-+=⎨⎪--=⎩作简单调整,使得用高斯-赛得尔迭代法求解时对任意初始向量都收敛,并取初始向量(0)[0 0 0]T x =,用该方法求近似解(1)k x+,使(1)()3||||10k k x x +-∞-≤. 答案:近似解为(4)[1.0000 1.0000 1.0000]Tx =.6.2 讨论松弛因子 1.25ω=时,用SOR 方法求解方程组121232343163420412x x x x x x x +=⎧⎪+-=⎨⎪-+=-⎩ 的收敛性.若收敛,则取(0)[0 0 0]T x=迭代求解,使(1)()41||||102k k x x +-∞-<⨯. 答案:方程组的近似解为*1 1.50001x =,*2 3.33333x =,*3 2.16667x =-.6.3 给定线性方程组Ax b =,其中111221112211122A ⎛⎫ ⎪ ⎪⎪= ⎪ ⎪ ⎪ ⎪⎝⎭,证明用雅可比迭代法解此方程组发散,而高斯-赛得尔迭代法收敛.6.4 设有方程组112233302021212x b x b x b -⎛⎫⎛⎫⎛⎫ ⎪⎪ ⎪= ⎪⎪ ⎪ ⎪⎪ ⎪-⎝⎭⎝⎭⎝⎭,讨论用雅可比方法和高斯-赛得尔方法解此方程组的收敛性.如果收敛,比较哪种方法收敛较快.答案:雅可比方法收敛,高斯-赛得尔方法收敛,且较快.6.5 设矩阵A 非奇异.求证:方程组Ax b =的解总能通过高斯-赛得尔方法得到.6.6 设()ij n nA a ⨯=为对称正定矩阵,对角阵1122(,,,)nn D diag a a a = .求证:高斯-赛得尔方法求解方程组1122D AD x b --=时对任意初始向量都收敛.第七章 非线性方程求根例7.4 对方程230xx e -=确定迭代函数()x ϕ及区间[,]a b ,使对0[,]x a b ∀∈,迭代过程1(), 0,1,2,k x x k ϕ+== 均收敛,并求解.要求51||10k k x x -+-<. 答案:若取2()x x ϕ=,则在[1,0]-中满足收敛性条件,因此迭代法121, 0,1,2,k x k x k +== 在(1,0)-中有惟一解.取00.5x =-,*70.458960903x x ≈=-.取2()x x ϕ=,在[0,1上满足收敛性条件,迭代序列121, 0,1,2,k x k x k +== 在[0,1]中有惟一解.取00.5x =,*140.910001967x x ≈=- 在[3,4]上,将原方程改写为23xe x =,取对数得2ln(3)()x x x ϕ==.满足收敛性条件,则迭代序列21ln(3), 0,1,2,k k x x k +== 在[3,4]中有惟一解.取0 3.5x =, *16 3.733067511x x ≈=.例7.6 对于迭代函数2()(3)x x c x ϕ=+-,试讨论:(1)当c 为何值时,1()k k x x ϕ+=产生的序列{}k x(2)c 取何值时收敛最快?(3)取1,2c =-()x ϕ51||10k k x x -+-<.答案:(1)(c ∈时迭代收敛.(2)c =时收敛最快.(3)分别取1, 2c =--,并取0 1.5x =,计算结果如下表7.7所示表7.7例7.13 设不动点迭代1()k x x ϕ+=的迭代函数()x ϕ具有二阶连续导数,*x 是()x ϕ的不动点,且*()1x ϕ'≠,证明Steffensen 迭代式21(), (), 0,1,2,()2k k k k k k k k k k k y x z x k y x x x z y xϕϕ+==⎧⎪=-⎨=-⎪-+⎩二阶收敛于*x .例7.15 设2()()()()()x x p x f x q x f x ϕ=--,试确定函数()p x 和()q x ,使求解()0f x =且以()x ϕ为迭代函数的迭代法至少三阶收敛.答案:1()()p x f x =',31()()2[()]f x q x f x ''=' 例7.19 设()f x 在[,]a b 上有高阶导数,*(,)x a b ∈是()0f x =的(2)m m ≥重根,且牛顿法收敛,证明牛顿迭代序列{}k x 有下列极限关系:111lim2k kk k k k x x m x x x -→∞-+-=-+.第八章 矩阵特征值8.1 用乘幂法求矩阵A 的按模最大的特征值与对应的特征向量,已知5500 5.51031A -⎛⎫ ⎪=- ⎪ ⎪-⎝⎭,要求(1)()611||10k k λλ+--<,这里()1k λ表示1λ的第k 次近似值.答案:15λ≈,对应的特征向量为[5,0,0]T-;25λ≈-,对应的特征向量为[5,10,5]T --. 8.2 用反幂法求矩阵110242012A -⎛⎫⎪=-- ⎪ ⎪-⎝⎭的按模最小的特征值.知A 的按模较大的特征值的近似值为15λ=,用5p =的原点平移法计算1λ及其对应的特征向量.答案:(1) A 的按模最小的特征值为30.2384428λ≈(2) 1 5.1248854λ≈,对应的特征向量为(8)[0.242 4310, 1 ,0.320 011 7]T U =--.8.3 设方阵A 的特征值都是实数,且满足121, ||||n n λλλλλ>≥≥> ,为求1λ而作原点平移,试证:当平移量21()2n p λλ=+时,幂法收敛最快. 8.4 用二分法求三对角对称方阵1221221221A ⎛⎫ ⎪ ⎪= ⎪ ⎪ ⎪⎝⎭的最小特征值,使它至少具有2位有效数字.答案:取5 2.234375λ≈-即有2位有效数字.8.5 用平面旋转变换和反射变换将向量[2 3 0 5]T x =变为与1[1 0 0 0]Te =平行的向量.答案:203/2/00001010/0T ⎛⎫⎪- ⎪=⎪--⎝0.324 442 8400.486 664 26200.811 107 1040.486 664 2620.812 176 04800.298 039 92200100.811 107 1040.298 039 92200.530 266 798H --⎛⎫⎪--⎪= ⎪ ⎪⎪--⎝⎭8.6 若532644445A -⎛⎫⎪=- ⎪ ⎪-⎝⎭,试把A 化为相似的上Hessenberg 阵,然后用QR 方法求A 的全部特征值.第九章 微分方程初值问题的数值解法9.1 用反复迭代(反复校正)的欧拉预估-校正法求解初值问题0, 0<0.2(0)1y y x y '+=≤⎧⎨=⎩,要求取步长0.1h =,每步迭代误差不超过510-. 答案: [4]11(0.1)0.904 762y y y ≈==,[4]22(0.2)0.818 594y y y ≈==9.2 用二阶中点格式和二阶休恩格式求初值问题2, 0<0.4(0)1dy x y x dx y ⎧=+≤⎪⎨⎪=⎩的数值解(取步长0.2h =,运算过程中保留五位小数).答案:用二阶中点格式,取初值01y =计算得0n =时,1211.000 00, 1.200 00, (0.2)=1.240 00K K y y ==≈ 1n =时,1221.737 60, 2.298 72, (0.4)=1.699 74K K y y ==≈用二阶休恩格式,取初值01y =计算得0n =时,1211.000 00, 1.266 67, (0.2)=1.240 00K K y y ==≈ 1n =时,1221.737 60, 2.499 18, (0.4)=1.701 76K K y y ==≈9.3 用如下四步四阶阿达姆斯显格式1123(5559379)/24n n n n n n y y h f f f f +---=+-+-求初值问题, (0)1y x y y '=+=在[0,0.5]上的数值解.取步长0.1h =,小数点后保留8位.答案:4(0.4)0.583 640 216y y ≈=,5(0.5) 1.797 421 984y y ≈=. 9.4 为使二阶中点公式1(,(,))22n n n n n n h hy y hf x y f x y +=+++,求解初值问题 , (0)y y y aλλ'=-⎧⎨=⎩为实常数绝对稳定,试求步长h 的大小应受到的限制条件. 答案:2h λ≤.9.5 用如下反复迭代的欧拉预估-校正格式(0)1(1)()111(,)[(,)(,)]2 0,1,2,; 0,1,2,nn n n k k n n n n n n y y hf x y h y y f x y f x y k n +++++⎧=+⎪⎪=++⎨⎪⎪==⎩,求解初值问题sin(), 01(0)1x y e xy x y '⎧=<≤⎨=⎩时,如何选择步长h ,使上述格式关于k 的迭代收敛. 答案:2h e<时上述格式关于k 的迭代是收敛的.9.6 求系数,,,a b c d ,使求解初值问题0(,), ()y f x y y x a '==的如下隐式二步法221()n n n n n y ay h bf cf df +++=+++的误差阶尽可能高,并指出其阶数.答案:系数为142,,33a b d c ====,此时方法的局部截断误差阶最高,为五阶5()O h .9.7 试用欧拉预估-校正法求解初值问题, (0)=1, 0<0.2()/, (0)2dyxy z y dxx dz x y z z dx⎧=-⎪⎪≤⎨⎪=+=⎪⎩,取步长0.1h =,小数点后至少保留六位.答案:由初值00(0)1, (0)2y y z z ====可计算得110.800 000z 2.050 000y =⎧⎨=⎩ , 11(0.1)0.801 500(0.1) 2.046 951y y z z ≈=⎧⎨≈=⎩ 220.604 820z 2.090 992y =⎧⎨=⎩ , 22(0.2)0.604 659(0.2) 2.088 216y y z z ≈=⎧⎨≈=⎩。
数值分析题库1
第一章 绪论 2 第二章 函数插值 3 第三章 函数逼近 6 第四章 数值积分与数值微分 10 第五章 解线性方程组的直接解法 13 第六章 解线性方程组的迭代解法 14 第七章 非线性方程求根 16 第九章 常微分方程初值问题的数值解法 19
第一章 绪论
1.1 要使的相对误差不超过0.1%,应取几位有效
解 对y=f(x)的反函数进行三次插值,插值多项式为
+ + + =, 于是有
。
第三章 函数逼近
3.1证明定义于内积空间H上的函数是一种范数。
证明: 正定性当且仅当时; 齐次性 设为数域K上任一数 三角不等式 ;
于是有 故是H上的一种范数。
3.2求,在空间上的最佳平方逼近多项式,并给出 误差。
解: 第一步:构造内积空间上的一组正交基,其中内积: 第二步:计算的二次最佳平方逼近多项式 从第一步已经知道,利用公式得: 误差为:
数字?
解:
的首位数字。 设有 n位有效数字,由定理知相对误差限 令, 解得,即需取四位有效数字.
1.2 序列满足关系式,若,计算到,误差有多
大?这个算法稳定吗?
解:,于是 ,一般地,因此计算到其误差限为,可见这个计算过程是不稳定的。
1.3 计算球的体积,要使相对误差限为1%,问测 量半径R时允许的相对误差限是多少?
4.1、计算积分,若用复化梯公式,问区间应分多 少等份才能使截断误差不超过?若改用复化辛普 森公式,要达到同样的精度,区间应分多少等 份?
解:由于,,,故对复化梯公式,要求 ,
即,.取,即将区间分为等份时,用复化梯公式计算,截断误差不超过. 用复化辛普森公式,要求 ,
即,.取,即将区间等分为8等份时,复化辛普森公式可达精度.
现代科学工程计算基础课后答案
现代科学工程计算基础课后答案《现代科学与工程计算基础》较为详细地介绍了科学与工程计算中常用的数值计算方法、基本概念及有关的理论和应用。
全书共分八章,主要内容有误差分析,函数的插值与逼近,数值积分与数值微分,线性代数方程组的直接解法与迭代解法,非线性方程及非线性方程组的数值解法,矩阵特征值和特征向量的数值解法,以及常微分方程初、边值问题的数值解法等。
使用对象为高等院校工科类研究生及理工科类非“信息与计算科学”专业本科生,也可供从事科学与工程计算的科技工作者参考。
《现代科学与工程计算基础》讲授由浅人深,通俗易懂,具备高等数学、线性代数知识者均可学习。
基本信息出版社: 四川大学出版社; 第1版 (2003年9月1日)平装: 378页语种:简体中文开本: 32ISBN: 7561426879条形码: 9787561426876商品尺寸: 20 x 13.8 x 1.6 cm商品重量: 399 g品牌: 四川大学出版社ASIN: B004XLDT8C《研究生系列教材:现代科学与工程计算基础》是我们在长期从事数值分析教学和研究工作的基础上,根据多年的教学经验和实际计算经验编写而成。
其目的是使大学生和研究生了解数值计算的重要性及其基本内容,熟悉基本算法并能在计算机上实现,掌握如何构造、评估、选取、甚至改进算法的数学理论依据,培养和提高读者独立解决数值计算问题的能力。
目录第一章绪论§1 研究对象§2 误差的来源及其基本概念2.1 误差的来源2.2 误差的基本概念2.3 和、差、积、商的误差§3 数值计算中几点注意事项习题第二章函数的插值与逼近§1 引言1.1 多项式插值1.2 最佳逼近1.3 曲线拟合§2 Lagrange插值2.1 线性插值与抛物插值2.2 n次Lagrange插值多项式2.3 插值余项§3 迭代插值§4 Newton插值4.1 Newton均差插值公式4.2 Newton差分插值公式§5 Hermite插值§6 分段多项式插值6.1 分段线性插值6.2 分段三次Hermite插值§7 样条插值7.1 三次样条插值函数的定义7.2 插值函数的构造7.3 三次样条插值的算法7.4 三次样条插值的收敛性§8 最小二乘曲线拟合8.1 问题的引入及最小二乘原理8.2 一般情形的最小二乘曲线拟合8.3 用关于点集的正交函数系作最小二乘拟合8.4 多变量的最小二乘拟合§9 连续函数的量佳平方逼近9.1 利用多项式作平方逼近9.2 利用正交函数组作平方逼近§10 富利叶变换及快速富利叶变换10.1 最佳平方三角逼近与离散富利叶变换10.2 快速富利叶变换习题第三章数值积分与数值微分§1 数值积分的基本概念1.1 数值求积的基本思想1.2 代数精度的概念1.3 插值型求积公式§2 等距节点求积公式2.1 Newton—CoteS公式2.2 复化求积法及其收敛性2.3 求积步长的自适应选取§3 Romberg 求积法3.1 Romberg求积公式3.2 Richardson外推加速技术§4 Gauss型求积公式4.1 Gauss型求积公式的一般理论4.2几种常见的Gauss型求积公式§5 奇异积分和振荡函数积分的计算5.1 奇异积分的计算5.2 振荡函数积分的计算§6 多重积分的计算6.1 基本思想6.2 复化求积公式6.3 Gauss型求积公式§7 数值微分7.1 Taylor级数展开法7.2 插值型求导公式习题第四章解线性代数方程组的直接法§1 Gauss消去法§2 主元素消去法2.1 全主元素消去法2.2 列主元素消去法§3 矩阵三角分解法3.1 Doolittle分解法(或LU分解)3.2 列主元素三角分解法3.3 平方根法3.4 三对角方程组的追赶法§4 向量范数、矩阵范数及条件数4.1 向量和矩阵的范数4.2 矩阵条件数及方程组性态习题第五章解线性代数方程组的迭代法§1 Jacobi迭代法§2 Gauss-Seidel迭代法§3 超松弛迭代法§4 共轭梯度法习题第六章非线性方程求根§1 逐步搜索法及二分法1.1 逐步搜索法1.2 二分法§2 迭代法2.1 迭代法的算法2.2 迭代法的基本理论2.3 局部收敛性及收敛阶§3 迭代收敛的加速3.1 松弛法3.2 Aitken方法§4 New-ton迭代法4.1 Newton迭代法及收敛性4.2 Newton迭代法的修正4.3 重根的处理§5 弦割法与抛物线法5.1 弦割法5.2 抛物线法§6 代数方程求根6.1 多项式方程求根的Newton法6.2 劈因子法§7 解非线性方程组的Newton迭代法习题……第七章矩阵特征值和特征向量的计算第八章常微方分程数值解法附录参考文献欢迎下载,资料仅供参考!!!资料仅供参考!!!资料仅供参考!!!。
线性代数方程组的解法
(2) 迭代解法:所谓迭代方法,就是构造某种 极限过程去逐步逼近方程组的解.
经典迭代法有: Jacobi 迭代法、Gauss Seidel 迭代法、 逐次超松弛(SOR)迭代法等;
上一页 下一页 4
5.1.1 向量空间及相关概念和记号
1 向量的范数
设 是n维实向量空间Rn上的范数,最常用的向量
a21 x1 a22 x2 a23 x3 a24 x4 b2 ,
(1)
a31 x1 a32 x2 a33 x3 a34 x4 b3 ,
a41 x1 a42 x2 a43 x3 a44 x4 b4 .
上一页 下一页 26
若 a11 0 ,则以第 i(i 2, 3,4) 个方程减去
证明 我们只证按行严格对角占优的情形,这时有
n
aij | aii |, i 1, 2,L , n
j 1 ji
假设 Ax 0有非零解x (x1, x2,L , xn ),
则存在下标1 i n,使得 xi
max 1 jn
xj
0,
考虑 Ax 0的第i 行 ai1x1 ai2x2 L ain xn 0
j 1 ji
且至少有一 i 个使不等式严格成立,则称矩阵 A 为按行对角占优矩阵。若 i 1, 2,L , n 严格不等 式均成立,则称 A 为按行严格对角占优矩阵. 类似地,可以给出矩阵 A 为按列(严格)对角
占优矩阵的定义.
上一页 下一页 22
定理 5.8 若 A为严格对角占优矩阵,则 A非奇异.
此时 A ( AT A) 2
若 A Rnn 为对称阵, A ( A) 2 ( 因为 ( AT A) ( A2 ) )
上一页 下一页 15
数值分析知识点总结

数值分析知识点总结说明:本文只提供部分较好的例题,更多例题参考老师布置的作业题和课件相关例题。
一、第1章 数值分析与科学计算引论1. 什么是绝对误差与相对误差?什么是近似数的有效数字?它与绝对误差和相对误差有何关系?相对误差限:**r re ε=的一个上界。
有效数字:如果近似值*x 的误差限是某一位的半个单位,该位到*x 的第一位非零数字共有n 位,就说x *共有n 位有效数字。
即x *=±10m ×(a 1+a 2×10-1+…+a n ×10-(n-1)),其中a 1≠0,并且*11102m n x x -+-≤⨯。
其中m 位该数字在科学计数法时的次方数。
例如9.80的m 值为0,n 值为3,绝对误差限*211102ε-=⨯。
2. 一个比较好用的公式:f(x)的误差限:()***()'()()f x f x x εε≈ 例题:二、第2章插值法例题:5. 给出插值多项式的余项表达式,如何用其估计截断误差?6. 三次样条插值与三次分段埃尔米特插值有何区别?哪一个更优越?7. 确定n+1个节点的三次样条插值函数需要多少个参数?为确定这些参数,需加上什么条件?8. 三弯矩法:为了得到三次样条表达式,我们需要求一些参数:对于第一种边界条件,可导出两个方程:,那么写成矩阵形式:公式 1对于第二种边界条件,直接得端点方程:,则在这个条件下也可以写成如上公式1的形式。
对于第三种边界条件,可得:也可以写成如下矩阵形式:公式 2求解以上的矩阵可以使用追赶法求解。
(追赶法详见第五章)例题:数值分析第5版清华大学出版社第44页例7三、第3章函数逼近与快速傅里叶变换的正交多项式?什么是[-1,1]上的勒让德多项式?它有3.什么是[a,b]上带权()x什么重要性质?4.什么是切比雪夫多项式?它有什么重要性质?5.用切比雪夫多项式零点做插值点得到的插值多项式与拉格朗日插值有何不同?6.什么是最小二乘拟合的法方程?用多项式做拟合曲线时,当次数n较大时,为什么不直接求解法方程?例题请参考第3章书上的作业题和课件上的例题。
第5章_线性方程组的解法

k 1
326
0
0
0
a(n) nn
bn(n
)
a1(11)
a(1) 12
a(2) 22
... ... ...
a(1) 1n
a(2) 2n ...
a(n) nn
x1
x2
... xn
bb12((12))
...
bn(n)
回代:
xn
b(n) n
/
a
(n nn
11
3种常用范数:
2-范数(长度)
n
1-范数
x ( 2
xi2 )1/2
i 1
∞-范数
n
x 1
xi
i 1
x
max
1 i n
xi
12
矩阵的范数: 对于给定的n阶方阵A,将比值 Ax / x 的上确界 称为矩阵A的范数
直接由定义知,对于任意向量x,有:|| A x ||≤|| A || || x || 基本性质:
det
a11
an1
a1i1
ani1
b1
bn
a1i1
a1n
ani1 ann
(1)计算n+1个n阶行列式. (计算一个n阶行列式就需要做(n-1)n!次乘法. 要计算n+1个n阶行列式,共 需做(n2-1)n!次乘法). (2)做n次除法才能算出xi(i=1,… n). (3)用此法,需作乘除法的运算: N=(n2-1)n!+n 例如,当n=10(即求解一个含10个未知量的方程组), 次数共为32659210次; 当n=100,1033次/秒的计算机要算10120年
a(1) 13
a(2) 23
高斯消去法
mi1
a (1) i1
/
a (1) 11
(i 2, 3,L , m)
用-mi1 乘方程组的第一个方程加到第i个方程,则原方程组同
解方程组为:
a1(11)
0
M 0
a1(12) a2(22)
M am(22)
L L M
a1(1n) a2(2n)
M
x1
x2
M
b1(1) b2(2)
M
L am(2n) xn bm(2)
2020/6/3
数值分析
引言
在自然科学和工程技术中许多问题的解决转化为解线性方 程组,而这些方程组的系数矩阵大致分为两种,一种是低阶稠 密矩阵,一种是高阶稀疏矩阵。
解线性方程组的数值解也有两种: 直接法,就是经过有限步算术运算,可以求得线性方程 组的解,但实际计算时有舍入误差的存在和影响,所以求 得的结果也只能是近似解对低阶稠密矩阵和部分大型稀疏 矩阵有效。
第五章 解线性方程组的直接方法
5.1 高斯消去法 5.2 高斯主元素消去法 5.3 矩阵的三角分解 5.4 误差分析
2020/6/3
数值分析
【本章重点】 1.Gauss 消去法和列主元消去法及其实现条件。 2.矩阵的三角分解,含LU分解和LLT 分解及三对角方程组的追
赶法。 3.向量和矩阵范数的定义及性质。 4.矩阵条件数及病态矩阵定义和解方程组直接法的误差估计。
即
a(1) 11
0
M
a(1) 12
a(2) 22 M
L L M
a(1) 1n
a(2) 2n M
x1
x2
M
b(1) 1
b(2) 2 M
0
0
第五章 小行星轨道方程计算问题
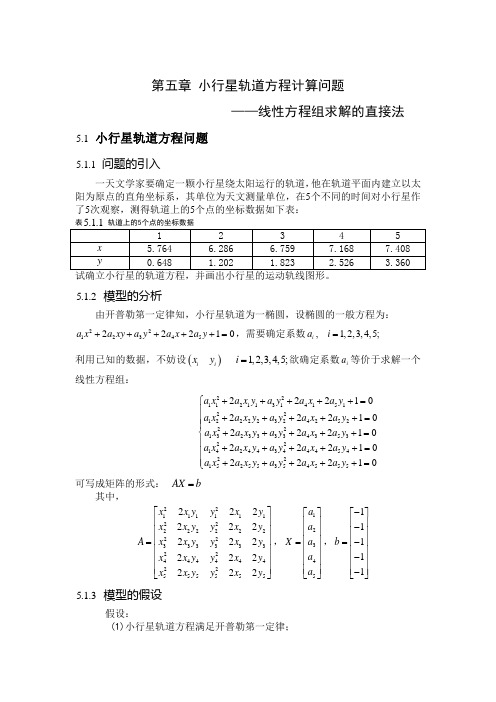
第五章 小行星轨道方程计算问题——线性方程组求解的直接法5.1 小行星轨道方程问题 5.1.1 问题的引入一天文学家要确定一颗小行星绕太阳运行的轨道,他在轨道平面内建立以太阳为原点的直角坐标系,其单位为天文测量单位,在5个不同的时间对小行星作了5次观察,测得轨道上的5个点的坐标数据如下表:5.1.2 模型的分析由开普勒第一定律知,小行星轨道为一椭圆,设椭圆的一般方程为:221234522210a x a xy a y a x a y +++++=,需要确定系数,1,2,3,4,5;i a i =利用已知的数据,不妨设()1,2,3,4,5;i i x y i =欲确定系数i a 等价于求解一个线性方程组:221121131415122122223242522213233334353221424434445422152553545552221022210222102221022210a x a x y a y a x a y a x a x y a y a x a y a x a x y a y a x a y a x a x y a y a x a y a x a x y a y a x a y ⎧+++++=⎪+++++=⎪⎪+++++=⎨⎪+++++=⎪⎪+++++=⎩ 可写成矩阵的形式:AX b = 其中,2211111122222222223333332244444422555555222222222222222x x y y x y x x y y x y A x x y y x y x x y y x y x x y y x y ⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦,12345a a X a a a ⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦,11111b -⎡⎤⎢⎥-⎢⎥⎢⎥=-⎢⎥-⎢⎥⎢⎥-⎣⎦ 5.1.3 模型的假设假设:(1)小行星轨道方程满足开普勒第一定律;(2)以上所测得数据真实有效。
数值分析52(高斯消去法)
二、矩阵的三角分解
由矩阵理论可知,对系数矩阵 A 实施行的初
等变换相当于用初等矩阵左乘 A ,即
A 行初等变换
A'
等价于
A'LA
E 其中
行初等变换
初等 矩阵
L
例
1 1 1
A 0 4 1 2 2 1
①*(-2)+③
则 A'LA
E 其中
①*(-2)+③
1 0 0
L
0
1 0
2 0 1
1 1 1 A' 0 4 1
高斯消去法的特点:消元和回代不同步!
3. 使用高斯消去法的条件
使用高斯消去法要求在每步消元时 ak(kk) 0 , 那么矩阵A满足什么,才能保证这一条件呢?
引理:约化的主元素 ak(kk) 0 (i=1,2,…,n) 的充 要条件是矩阵A的顺序主子式 D i 0(i1,2,..n.),
推论:如果A的顺序主子式不等于0,则
aa1k((1k1k))
D1 Dk
Dk1
(k=2,3,…,n)
定理:如果 n 阶矩阵A的所有顺序主子式均 不为零,则可通过高斯消去法(不进行交 换两行的初等变换),将方程组约化为三 角形方程组。
定理:如果A为 n 阶非奇异矩阵,则可通过 高斯消去法(及交换两行的初等变换)将方 程组 Ax=b 化为三角形方程组。
第五章 解线性方程组的直接法 §2 高斯消去法
一、高斯消去法 二、矩阵的三角分解 三、高斯消去法的计算量 四、高斯—约当消去法
一、高斯消去法
1. 高斯消去法的基本思想
举例 用消去法解方程组
基原本来思方想程4x:1x组2用AxX逐2x=3次b化x消53为去与6未其知等数价的的方三法角把 形方程组2,x1而 求2x解2 三x角3形方1 程组就容易
数值计算方法-第5章_解线性方程组的直接法
本章讲解直接法
5.1 消元法
我们知道,下面有3种方程的解我们可以直接求出:
①
n次运算
A
diag(a11, a22 ,
, ann )
xi
bi aii
,i
1,
,n
②
(n+1)n/2次运算
l11
A
l21 ln1
l22 ln2
(aik
k 1
liklkr ) r 1 lkk
,i k 1, , n
因此不常用
又 l11
1
l11
l21 l22
ln1
ln2
lnn
l '21 l 'n1
1 l'n2
1
l22
lnn
则有
A L~D~D~T L~T LDLT
L~
D~
1
L
l21 ln1
lnn
xi
bi
i 1
lij x j
j 1
lii
,i
1,
,n
③
(n+1)n/2次运算
u11
A
u12 u22
u1n
u2n unn
xi
bi
n
uij x j
j i 1
uii
,i
n,
,1
对方程组,作如下的变换,解不变 ①交换两个方程的次序 ②一个方程的两边同时乘以一个非0的数 ③一个方程的两边同时乘以一个非0数,加到另一个方程
1 ln2
1
d1
D
d2
dn
a11 a12
a21 a22
数值分析第五章解线性方程组的直接法

数值分析第五章解线性方程组的直接法解线性方程组是数值分析中的一个重要问题,对于大规模的线性方程组来说,直接法是一种常用的求解方法。
本文将介绍解线性方程组的直接法,包括高斯消元法和LU分解法,并对其稳定性和计算复杂度进行讨论。
高斯消元法是一种常用的直接法,用于求解非奇异线性方程组。
其基本思想是通过初等行变换将线性方程组转化为上三角方程组,然后通过回代求解得到方程的解。
高斯消元法的步骤如下:1.将线性方程组表示为增广矩阵[A,b],其中A是系数矩阵,b是常数向量。
2.从第一行开始,选择一个非零元素作为主元,通过行变换将主元下方的元素全部消为零。
3.重复第2步,直到矩阵变为上三角矩阵。
4.通过回代求解上三角矩阵,得到方程组的解。
高斯消元法的主要优点是简单直接,容易实现,但存在一些问题。
首先,如果系数矩阵A是奇异矩阵,即行列式为零,那么高斯消元法无法得到方程组的解。
其次,如果系数矩阵A的其中一行或几行接近于线性相关,那么在消元过程中会引入大量的舍入误差,导致计算结果不准确。
这也说明了高斯消元法的稳定性较差。
为了提高稳定性,可以使用LU分解法来解线性方程组。
LU分解法将系数矩阵A分解为两个矩阵L和U的乘积,其中L是下三角矩阵,U是上三角矩阵。
这样,原始的线性方程组可以表示为LUx=b,进而可以通过两个步骤来求解方程组:1.进行LU分解,将系数矩阵A分解为L和U。
2.分别用前代和回代的方法求解方程组Ly=b和Ux=y。
LU分解法相对于高斯消元法的优点是,可以在求解多个右端向量时,避免重复计算LU分解,从而提高计算效率。
同时,LU分解法的稳定性也较高,对于多个右端向量求解时,舍入误差的累积相对较小。
然而,LU分解法也存在一些问题。
首先,LU分解法的计算复杂度较高,需要进行两次矩阵乘法和一次矩阵向量乘法,而且LU分解过程中需要对系数矩阵A进行大量的行变换,增加了计算量。
其次,当系数矩阵A的一些元素非常小或非常大时,LU分解法容易出现数值不稳定的情况,即舍入误差的累积较大,导致计算结果不准确。
高斯消去法

(Direct Method for Solving Linear Systems)
在工程技术、自然科学和社会科学中,经常遇到的许 多问题最终都可归结为解线性方程组,如电学中网络问题、 用最小二乘法求实验数据的曲线拟合问题,工程中的三次 样条函数的插值问题,经济运行中的投入产出问题以及大 地测量、机械与建筑结构的设计计算问题等等,都归结为 求解线性方程组或非线性方程组的数学问题。因此线性方 程组的求解对于实际问题是极其重要的。
关于线性方程组的数值解法有两大类:
① 直接法:就是经过有限步算术运算,可求得方程组精 确解的方法(若计算过程中没有舍入误差),如克莱姆 法则就是一种直接法,但实际上由于舍入误差的存在, 这类方法也只能求得线性方程组的近似解。 直接法中具有代表性的算法是高斯(Gauss)消去 法。其特点是准确,可靠,理论上得到的解是精确的. 这类方法是解低阶稠密矩阵方程组的有效方法.
(2)
或简单地记为:
A x b ,
A (a ij)n n,x(x1 ,x2,Lxn)T ,b (b 1 ,b 2,Lb n)T .
5.2 Gauss消去法
第五章方程组的直接解法
G auss消 去 法 是 一 个 古 老 的 求 解 线 性 方 程 组 的 方 法 。 由 它 改 进 的 选 主 元 法 是 目 前 计 算 机 上 常 用 的 有 效 的 求 解 低 阶 稠 密 矩 阵 线 性 方 程 组 的 方 法 。
此 例 可 见 G a u ss消 去 法 的 基 本 思 想 是 : 用 矩 阵 得 初 等 行 变 换 将 系 数 矩 阵 A 化 为 具 有 简 单 形 式 的 矩 阵 ( 如 上 三 角 阵 , 单 位 矩 阵 等 ) , 而 三 角 形 方 程 组 是 很 容 易 回 代 求 解 的 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五章解线性方程组的直接方法⏹预备知识⏹消元法⏹矩阵分解法⏹追赶法⏹误差分析线性代数是数值计算方法的基础,学习它对数值计算方法其它内容的学习会有很大的帮助。
无论是插值公式的建立,还是微分方程的离散格式的构造,其基本思想都是转化为代数问题来处理,即归结为解线性方程组。
MATLAB的强大功能是建立在矩阵和向量运算基础上的,线性代数的学习也可以大大提高对MATLAB的掌握程度。
线性方程组的基本解法:直接解法:经过有限步算术运算,在不考虑舍入误差的情况下求得方程组的精确解;迭代解法:用某种极限过程逐步逼近方程组的精确解。
5.1 预备知识: 矩阵和向量及线性方程组的解方阵:m=n 的矩阵;零矩阵:所有元素都为0的矩阵。
在MATLAB中零矩阵由zeros 命令定义。
如A=zeros(m,n)定义一个m×n 零矩阵,n×n 零矩阵可以用命令A=zeros(n)定义。
单位矩阵:所有对角元为1而其余元素均为0的方阵。
单位矩阵记为I。
在MATLAB 中单位矩阵由eye命令定义。
如A=eye(n)定义一个n阶单位矩阵。
元素都是1的矩阵:在MATLAB中元素都是1的矩阵由ones命令定义。
如A=ones(m,n)定义一个m×n阶的元素都是1的矩阵。
矩阵的加法和减法:行列数相同的矩阵之间才可以进行加法和减法。
矩阵的乘法:若A的行数和B的列数相等,则它们可以相乘C=AB。
其中C的第i 行第j列元素等于A的第i行和B的第j列对应元素乘积之和。
逆矩阵:若两个方阵A和B满足:AB=I且BA=I,则称A和B互为逆矩阵。
在MATLAB 中M的逆矩阵由inv(M) 命令计算。
对于任一非奇异矩阵都可用inv命令计算其逆矩阵。
若MATLAB拒绝计算一个方阵的逆矩阵,则此矩阵一定是奇异的。
一个奇异矩阵的行列式是0(或者至少有一行(列)可以用其它行(列)通过多次加法和减法表示)。
行列式:方阵A的行列式是一个标量值,用det(A)或|A|表示。
在MATLAB中矩阵A的行列式由det(A)命令计算。
如d =det (A )计算一个n 阶方阵A 的行列式。
特征值和特征向量:在MATLAB 中用eig 函数计算矩阵A 的特征值和特征向量。
如D =eig(A)计算方阵A 的特征值向量,而[V,D]=eig(A)则计算V 为特征向量,D 为特征值组成的对角矩阵。
矩阵运算的性质:设A ,B ,C ,…是矩阵,p,q,r,…是标量,而且对应矩阵运算有定义,则A(BC)=(AB)C IA =AI =AA(B +C)=AB +AC (A +B)C =AC +BC P(A +B)=pA+pB p(AB)=(pA)B=A(pB) A+B=B+A A+0=0+A=A A+(B+C)=(A+B)+C p(qA)=(pq)A (AB)T =B T A T (AB)-1=B -1A -1 det(AB)=det(A)det(B)正定矩阵及其性质:……。
给定下列n 元线性方程组⎪⎪⎩⎪⎪⎨⎧=+++=+++=+++nn nn n n n n n n b x a x a x a b x a x a x a b x a x a x a ΛΛΛΛΛ22112222212111212111 矩阵形式 b AX = 线性方程组解唯一的条件:0||≠A 。
定理5.1.1(线性方程组的初等运算) 下面三种变换可以将一个线性方程组变成另一个等价线性方程组:交换变换:对调方程组的任意两个方程; 比例变换:用非零常数乘某一个方程;替换变换:将某一个方程乘一个常数,再加到另一个方程上去。
定理5.1.2(矩阵的初等行变换)对一个线性方程组的增广矩阵进行如下的变换可得到一个等价的线性方程组的增广矩阵:交换行变换:对调任意两行; 比例行变换:用非零常数乘某一行;替换行变换:将某一行乘一个常数,再加到另一行上去。
初等矩阵及其性质:……。
5.2 消去法直接法:假设计算过程中不产生舍入误差,经过有限次运算可求得方程组的精确解。
思路:将线性方程组变形成等价的三角方程组。
最基本的直接法就是消去法。
5.5.1.高斯消去法思路:先逐次消去变量,将方程组化解成同解的上三角方程组,此过程称为消去过程;然后按方程组相反顺序求解上三角方程组,得到原方程组的解,此过程称为回代过程。
一般地,对于n阶线性方程组:⎪⎪⎩⎪⎪⎨⎧=+++=+++=+++nn nn n n n n n n b x a x a x a b x a x a x a b x a x a x a ΛΛΛΛΛ22112222212********* 矩阵形式 b AX = (5.5.1) 消元过程:第一步:用第1个方程乘上乘数-1,11,a a i 分别加到第i(i=2,3,…,n)个方程上去,从而消去第i 个方程的首项,方程组(5.3.1)变为下列形式:a 1,1x 1+ a 1,2x 2 + … + a 1,n x n =b 1)1(2,2a x 2 + … + )1(,2n a x n =)1(2b (5.5.2)……)1(2,n a x 2 + … + )1(,nn a x n =)1(n b 其中 )1(1,i a =1,11,a a i , j=2,3,…,n;)1(,j i a = a i,j –)1(1,i a * a 1,j ;)1(i b = b i –)1(1,i a * b 1 , i=2,3, … , n, j=2,.3,…,n.若经过k-1 步后,从方程组(5.5.1)得到下列形式的方程组:)1(11a x 1+)1(12a x 2 + … + )1(1n a x n = )1(1b)2(2,2a x 2 + … +)2(,2n a x n = )2(2b…… (5.5.3))1(1,1---k k k a x k-1+ … +)1(,1--k nk a x n = )1(-k k b ………)1(1,--k k n a x k-1+ … +)1(,-k nn a x n =)1(-k n b 则对第k 列进行消元可将变为如下形式:)1(11a x 1+)1(12a x 2 + … + )1(1n a x n = )1(1b)2(2,2a x 2 + … +)2(,2n a x n = )2(2b………… (5.5.4))(,k k k a x k + … +)(,k n k a x n = )(k k b………)(,k k n a x k + … +)(,k n n a x n =)(k n b其中: )(,k ki a=)1(1,1)1(1,-----k k k k k i aa , i=k,…,n,)(,k j i a = )1(,-k j i a –)(,k k i a *)1(,-k j k a ;)(k i b = )1(-k i b –)(,k k i a *)1(-k k b , i=k, … , n, j=k,…,n.经过(n-1)步消元后,最后从(5.5.1)可得到一个上三角方程组:)1(11a x 1+)1(12a x 2 + … + )1(1n a x n = )1(1b)2(2,2a x 2 + … +)2(,2na x n = )2(2b …………………… (5.5.5))1(1,1---n n n a x n-1 +)1(,1--n nn a x n = )1(1--n n b )(,n n n a x n = )(n n b回代过程:逐步回代得到解:x n = )(,)(n nn n na bx i = ()(i ib -∑+=ni j 1)(,i j i a x j ) / )(,i i i a , i=n-1,n-2, …, 1. (5.5.6)上述方法称为高斯消去法。
高斯消去法进行的条件:由以上过程有:0det )()2(22)1(11≠=n nn a a a A Λ,其中)1(-k kk a 称为约化主元素。
定理 5.5.1 设n n ij a A ⨯=}{非奇异,且各阶顺序主子式0≠∆k (n k ,,2,1Λ=),则0)(≠k kk a ,从而高斯顺序消元法可以进行,且得到方程组(5.5.1)的解为(5.5.6).高斯消元法约化主元素0)(,≠k k k a (k=1,2,…,n )⇔ A 的顺序主子式0≠k D (k=1,2,…,n)定义5.3.1 称n 阶方阵A =(a i,j )n 是对角占优的,若其主对角元素的绝对值大于同行其它元素绝对值之和∑≠=nkj j ,1|a k,j | < |a k,k |, k=1,2,…,n定理5.5.2 设方程组(5.5.1)是对角占优的,则在高斯消去法的消元过程中约化主元素0)1(≠-k kka (k=1,2,…,n-1). 练习1 在MATLAB 上用高斯消去法求解方程组:-0.04 x 1 + 0.04 x 2 + 0.12 x 3 = 3, 0.56 x 1 - 1.56 x 2 + 0.32 x 3 = 1,0.24 x 1 + 1.24 x 2 - 0.28 x 3 = 0,gauss.m(自编程作业)>>A=[-0.04 0.04 0.12;0.56 –1.56 0.32;0.24 1.24 –0.28]; >>B=[3;1;0]; >>X=gauss(A,B)高斯消去法的计算时间复杂性:高斯消去法需要次31(n 3+3n 2-n)乘除法和61(2 n 3+3n 2-5n)次减法,即它的计算时间复杂性为O(n 3)。
高斯消去法的缺点:考察高斯消去法的消去过程,我们可以看出为使消元过程顺利完成,)(,k k k a (k=1,2,…,n )必须全不为0。
但即使在消元过程中主元素)(,k k k a (k=1,2,…,n )全不为0,也不能保证能够避免在计算过程中产生巨大的误差。
因为在计算过程中,若主元素的绝对值过小,则舍入误差的影响会严重地损失精度。
提出主元法是为了控制舍入误差。
5.5.5.选主元素消元法(以避免a (k)k,k = 0 或过小的情形) 例2 考察方程组: 10-5 x +y =1 x + y =2 精确解为 x=100000/99999, y=99998/99999.若使用四位浮点十进制运算进行消元 10-5 x +y =1;-105 y =-105. % 105-1≈105 利用回代过程得x=0, y=1 若用消去法求解方程组:x + y =5. 10-5 x +y =1;则可得 x=1 , y=1。
显然第一个结果严重失真,而第二个结果则比较精确。
究其原因,就是由于消元过程中主元素的绝对值过小。