领会变形体虚功原理和互等定理
《结构力学》课程教学大纲

《结构力学》课程教学大纲课程类别:专业基础课适用专业:建筑工程技术适用层次:高起专适用教育形式:网络教育/成人教育考核形式:考试所属学院:土木工程与建筑学院先修课程:理论力学、材料力学一、课程简介结构力学是土木工程专业的一门重要的专业课,通过结构力学课程的学习,使学生掌握杆件结构的计算原理,掌握各类结构的受力分析方法,为后续学习相关专业课程以及进行结构设计和科学研究打好力学基础。
包括体系几何构造分析、影响线、静定结构的内力和位移计算、超静定结构的内力和位移计算等内容。
二、课程学习目标通过本课程的学习, 使学生掌握杆件结构的计算原理,掌握各类结构的受力分析方法,逐渐培养学生的计算能力及综合运用结构力学知识去分析、解决实际工程问题的能力。
课程的具体目标如下:课程目标1:了解结构力学的研究对象,结构计算简图及简化要点。
课程目标2:掌握平面几何不变体系的组成规律。
课程目标3:掌握静定结构内力分析和位移计算的原理及方法。
课程目标4:掌握超静定结构内力分析和位移计算的原理及方法。
课程目标5:了解结构动力计算的基础知识。
三、与其他课程的关系此门课程为专业基础课,起到承上启下的作用,要先修完理论力学、材料力学等课程,才能修本门课程,也是后续钢结构、钢筋混凝土设计原理、气体结构等专业课程学习的基础。
四、课程主要内容和基本要求本门课程主要包括以下几块内容:几何构造分析、静定结构的内力计算、图乘法求静定结构的位移、机动法作影响线、力法及位移法解算超静定结构力学问题;其中力法是结构力学的核心内容,其要先学完静力学后学习超静定结构,力法是解决超静定结构问题的基本算法。
第一章绪论『知识点』结构力学的研究对象及任务;结构的计算简图及简化要点;杆件的分类;荷载的分类。
『基本要求』1、识记:计算简图,荷载。
2、领会:荷载的性质及分类。
3、简单应用:要求学生学习后能对简单的实际结构画出计算简图。
『关键知识』结构的计算简图。
『重点』计算简图的简化要点。
土木工程力学(本).
土木工程力学(本)第四章静定结构的位移计算学习要求1. 理解变形体体系虚功原理的内容及其应用。
2. 理解并熟练掌握静定结构位移计算的一般公式。
3. 熟练掌握静定结构在荷载作用下的位移计算方法及图乘法。
4. 掌握支座位移和温度改变等因素作用下的位移计算方法。
5. 了解线弹性结构的互等定理。
6. 理解静定结构的基本力学特性。
学习重点1. 变形体体系的虚功原理及其应用。
2. 静定结构位移计算的一般公式和不同外因作用下的应用。
3. 图乘法计算荷载作用下静定梁和刚架等的位移。
4. 静定结构的基本力学特性。
常见问题解答1.什么是结构的变形和位移?变形,是指结构或构件的截面形状发生改变,而位移则是指结构各处位置的移动。
静定结构产生位移的原因有荷载作用、温度变化、支座位移、制造误差、材料收缩等。
荷载作用使静定结构产生内力,进而发生变形,导致结构产生位移。
温度变化时,静定结构产生位移,不产生内力。
支座位移(移动或转动)时,静定结构既无内力也无变形产生,只发生刚体位移。
2.静定结构位移计算时采用了什么假设条件?静定结构位移计算时,通常采用以下假设条件:(1)结构、构件的材料符合胡克定律,即应力应变成线性关系。
(2)结构、构件发生的变形与其几何尺寸相比极其微小,因此,可以认为结构或构件的几何形状和尺寸以及荷载的作用位置及方向在变形前后保持不变。
满足上述假设条件的结构体系称为线弹性结构。
线弹性结构中的结构体始终是连续的,位移与荷载之间成线性比例关系,卸载之后位移完全消失,所以计算位移时可以使用叠加原理。
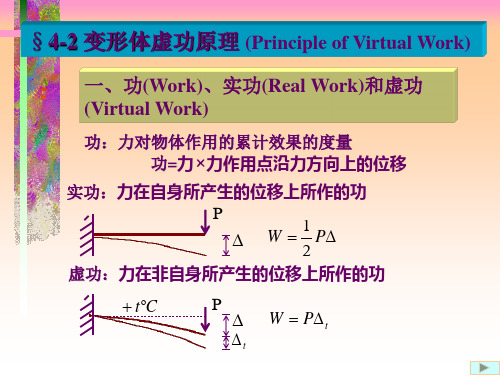
3.什么是实功和虚功?力在其自身引起的位移上作功称为实功。
当作功所需两个因素中的力与其相应的位移彼此独立无关时,这种功称为虚功。
实功恒为正值,虚功可以是正值、负值和零。
实功不能应用叠加原理。
虚功可以应用叠加原理。
4.什么是变形体体系的虚功原理?变形体体系的虚功原理可以表述为:若变形体体系在力系作用下处于平衡状态,由其它原因产生的微小连续位移满足约束条件,则力状态中的外力在位移状态中相应位移上所作的虚功恒等于力状态中的内力在位移状态中相应变形上所做的虚功。
结构力学I-第五章 虚功原理与结构位移计算(温度位移、虚功、互等)
温度改变时的位移计算
结构位移计算的一般公式
普遍性
Δ = ∑ ∫ ( Mκ + FNε + FQγ0 ) ds- ∑FRK·cK
⑵ 变形因素:荷载、温度改变或支座移动引起的位移;
温度改变的位移计算公式
应用背景
Page 10
14:26
LOGO
温度改变时的位移计算
温度改变的位移计算公式
基本假设
FQ FN
dFN
pdx
0
dFQ qdx 0
dM FQdx 0
• 集M M 0 0
M
FQ FN
M
Page 22
q
FQ+ dFQ
p
FN+ dFN
O
x
M+ dM dx
y
dx
M0 O
Fx
Fy y
FQ+ ΔFQ FN+ ΔFN x
M+ ΔM
14:26
D 1
α=1×10-5,求D点的竖向位移ΔDV。
2m 2m
解:⑴ 在D点作用一向上的单位力F=1,
4m
作弯矩图 M 和轴力图 F N;
⑵ 由于各杆 α,t0,Δt,h 相同,
故可先计算
+1
1
M ds
1 2
4
4
4
4
24(m2
)
M
FN
F Nds 1 2 1 4 2(m)
Page 15
14:26
LOGO
结构力学I
第五章 虚功原理与 结构位移计算
2021年4月15日
LOGO
3-12(g)
指出弯矩图错误并改正;
作业点评
第二章变形体虚位移原理

() d () dx (), x x dx x
x 位置变化示意 (a)
(b)微元体边界合力示意
图2-1 平面微元体受力示意
在图2-1a AB边上的
x
合力 T x 有如下近似(曲线面积近似等于梯形面积)计算
1 1 x x 2 T ( d ) d y y d y dy x x x x 2 y 2 y
1、应力边界条件
从边界部分取微元体如图2-3所示,微元体边界上的应力、表面力均已用 ds 、 dx 、dy 间的关系为 合力表示。与建立平衡方程一样,注意:
l dy / ds y , dx / ds x , s m s
m 式中 l , 为边界外法线的方向余弦。
FSy ds
t
应力边界条件
2、对于三维问题,运动方程为 xy x x y yx y x y zy zx x y
的运动微分方程。由式(2-2)可见,式(2-1)是惯性力为零时的特例。
xz 2u Fbx z t 2 yz 2v Fby z t 2 z Fbz z 2 w t 2
2、位移边界条件
当边界 S u 上位移为给定值 u ,v 时,由位移协调,位移边界条件可表示为
S u 表面上
u u
v v
(2-8a)
三维问题的位移边界条件
u u
v v
w w
(2-8b)
2-1-4 线弹性体的物理方程(本构关系)
对于各同性二维弹性体有图2-4所示的两种情况。图2-4a 表示荷载作用平行于板中面且沿厚度均匀分布,板厚 远小于平 面内方向的尺寸,也即 2 a , 2 b ,这类问题 称为平面应力问题。这时 0 z yz zx
变形体的虚功原理
变形体的虚功原理变形体是工程力学中的重要概念,它指的是在受力作用下形状或尺寸发生变化的物体。
在研究变形体的力学特性时,虚功原理是一种常用的分析方法。
虚功原理是指,在变形体受力作用下,通过引入虚位移,将受力和虚位移的乘积对整个系统进行求和,从而得到系统的平衡方程。
本文将详细介绍变形体的虚功原理及其应用。
首先,我们来了解一下虚功原理的基本概念。
虚功原理是基于能量守恒定律的,它认为在平衡状态下,外力对系统所做的虚功等于内力所做的实功。
虚功原理的应用需要引入虚位移,虚位移是指在系统受力作用下,假设系统中的某一部分发生微小位移,而其他部分不发生位移。
通过引入虚位移,我们可以得到系统的平衡方程,从而分析系统的受力情况。
在实际工程中,虚功原理常常用于分析结构体系的受力情况。
以梁结构为例,当外力作用于梁上时,梁会产生弯曲变形。
通过引入虚位移,我们可以得到梁的弯曲方程,进而分析梁的受力情况。
虚功原理的应用不仅可以简化受力分析的过程,还可以得到更为准确的结果。
除了在静力学中的应用,虚功原理在弹性力学、材料力学等领域也有着重要的应用。
在弹性力学中,虚功原理可以用于分析材料的应力-应变关系,从而得到材料的力学性能参数。
在材料力学中,虚功原理可以用于分析材料的变形情况,进而指导工程设计和材料选择。
总之,虚功原理是工程力学中的重要分析方法,它通过引入虚位移,得到系统的平衡方程,从而分析系统的受力情况。
虚功原理不仅在静力学中有着重要的应用,还在弹性力学、材料力学等领域发挥着重要作用。
掌握虚功原理的基本原理和应用方法,对于工程力学的学习和工程实践都具有重要意义。
希望本文能够帮助读者更好地理解变形体的虚功原理,同时也希望读者能够在工程实践中灵活运用虚功原理,为工程设计和分析提供有力的支持。
变形体虚功原理

变形体虚功原理
变形体虚功原理是结构力学中的一个重要概念,它在分析和计算结构变形时起
着至关重要的作用。
虚功原理是指在结构受力变形过程中,外力所做的虚功等于内力所做的虚功,即外力和内力之间的平衡关系。
通过虚功原理,我们可以更加简洁地分析结构的受力情况,从而得出结构的变形情况和受力分布。
在应用虚功原理时,我们通常会利用虚位移的概念。
虚位移是指结构在受力变
形过程中,假设某一部分结构发生微小位移,而其他部分不发生位移。
通过引入虚位移,我们可以将结构的受力分析问题转化为能量平衡问题,从而更加方便地进行计算和分析。
虚功原理的应用范围非常广泛,几乎涉及到结构力学的各个方面。
在静力学中,我们可以利用虚功原理来分析梁、柱、桁架等结构的受力情况;在变形分析中,虚功原理也可以帮助我们计算结构的变形情况和受力分布;在动力学中,虚功原理同样可以用于分析结构的振动和冲击响应。
虚功原理的应用不仅仅局限于理论分析,它在工程实践中同样具有重要意义。
例如,在工程设计中,我们可以通过虚功原理来优化结构设计,减小结构的变形和应力集中;在结构监测中,虚功原理也可以用于评估结构的安全性和稳定性。
总的来说,虚功原理作为结构力学的基本原理之一,对于分析和计算结构的受
力和变形具有重要的意义。
通过深入理解和应用虚功原理,我们可以更加准确地把握结构的受力行为,为工程实践提供可靠的理论支持。
希望本文对虚功原理的理解和应用有所帮助,谢谢阅读!。
材料力学第38课 互等定理及虚功原理
上海市应用数学和力学研究所Shanghai Institute of Applied Mathematics and Mechanics材料力学微课程适用对象和参考教材内容满足:航空、航天、机械、土木、动 力、水利、车辆、采矿、船舶、港口航道 及海岸工程等专业的材料力学教学要求。
例题、课后练习等主要以郭战胜、施冬莉、 宋亦诚、杨骁等编著,同济大学出版社2015 年出版的材料力学(第二版)为参考教材。
上海市应用数学和力学研究所Shanghai Institute of Applied Mathematics and Mechanics主讲人郭战胜主要教育工作经历 06.9 –今.上海大学上海市应用数学和力学研究所上海市应用数学和力学研究所Shanghai Institute of Applied Mathematics and Mechanics教授、博导 09.3–10.9. 美国哈佛大学访问学者 04.8–06.7. 同济大学力学博士后流动站博士后 01.9-04.7. 哈尔滨工业大学 工程力学博士研究生 99.9-01.7. 哈尔滨工业大学 结构工程硕士研究生 96.7–99.9. 中国建筑三局一公司(上海)技术员 96.7. 毕业于重庆建筑大学(现重庆大学)土木工程学院互等定理及虚功原理主讲人:郭战胜 教授 邮箱: davidzsguo@ 上海市应用数学和力学研究所 上海大学上海市应用数学和力学研究所Shanghai Institute of Applied Mathematics and Mechanics4本讲主要内容互等定理 虚功原理上海市应用数学和力学研究所Shanghai Institute of Applied Mathematics and Mechanics5互等定理线弹性,位移可以叠加,但应变能不能叠加FPFP1Vε1O Δ1FPFP2Δ OVε2 Δ2FPFP1+FP2Vε Δ Vε1OVε2Δ Δ上海市应用数学和力学研究所Shanghai Institute of Applied Mathematics and Mechanics互等定理一个有意义的结果FPFPFP1Δ2FP2ΔΔ1ΔO Δ1O Δ2上海市应用数学和力学研究所Shanghai Institute of Applied Mathematics and Mechanics互等定理应用能量守恒原理和叠加原理,可以导出功的互等 定理与位移互等定理。
结构位移计算

1/l
求AB两截面 的相对转角
1/l
求AB两点 连线的转角
例 1:已知图示梁的E 、G, 求A点的竖向位移。
解:构造虚设单位力状态.
q
A
h b
N ( x) 0, N P ( x) 0
l
Q ( x) 1, QP ( x) q(l x) M ( x) x l, M P ( x) q(l x)2 / 2
i k 1 1 2
a
2
ω1
l/3 c
y1
l/3
ω2
b
l/3
d
6
y2
b)非标准抛物线成直线形
例:求图示梁中点的挠度。
1 1 3a 3a Pa EI 2 4
P Pa Pa
P
?
P
MP
a
2 Pa a 2 a a 2 3a 4 a Pa EI 32 2 2 2 23Pa3 24 EI
P=1
l/6
M
求C点竖向位移。 q=625N/m 200 2.2 ↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓ w1 220 C B A 2 2.2m 0.8m 2 0.8 y1 4Nm2 200 EI=3.6465 × 10 3 378 2 378 2.2 w2 555 ω1 ω 3
构;静定和超静定结构;
3. 材料性质:线性、非线性; 4. 变形类型:弯曲变形、拉(压)变形、剪切
变形;
5. 位移种类:线位移、角位移;相对线位移
和相对角位移。
荷载作用下的位移计算
注:(1)EI、EA、GA是杆件截面刚度; k是截面形状系数k矩=1.2, k圆=10/9。 真实 位移 (2)NP、QP、MP实际荷载引起的内力, 状态 是产生位移的原因;虚设单位荷载 引起的内力是 N , Q , M (3)公式右边各项分别是轴向、剪切、弯曲变形产生的位移。 NP ds = NN P l (4)梁和刚架 Δ= M MP ds (5)桁架 Δ= N EA EA EI MM NN 用于桁架杆 (6)桁梁混合结构 Δ= EI ds EA l
虚功原理证明
δ We = δ Wi
任何一个处于平衡状态的变形体,当发生任意一个虚 位移时,变形体所受外力在虚位移上所作的总虚功δWe,恒 等于变形体各微段外力在微段变形位移上作的虚功之和δWi。
变形体虚功原理的证明:
q x
a
a
a
a
b b
b b b
1.利用变形连续性条件计算 所有微段的外力虚功之和 W 微段外力分 体系外力 为两部分 相互作用力 微段外力功 体系外力功dWe 分为两部分 相互作用力功dWn 微段外力功 dW= dWe+dWn 所有微段的外力功之和: W=∫dWe+∫dWn =∫dWe =δWe
微段外力:
N
N dN
Q成:
微段拉伸
ds
微段弯曲
ds
ds 微段剪切
对于直杆体系,由于变形互不耦连,有: δWi =Σ∫[Nδε+Qδγ+Mδθ]ds
δWe =Σ∫[Nδε+Qδγ+Mδθ]ds
四、虚功原理的两种应用
1)虚功原理用于虚设的协调位移状态与实际的 平衡力状态之间。
2 1
W P
W M
3)作虚功的力系为两个等值 反向的集中力偶 M M P
4)作虚功的力系为两个等值 反向的集中力
A B
P
W P A P B P( A B ) P
B A W M A M B M ( A B ) M
t C
P
t
W Pt
§3.2 变形体虚功原理 (Principle of Virtual Work)
一、功(Work)、实功(Real Work)和虚功 (Virtual Work)
变形体的虚功原理

F 表示由零增加到 Fi 过程中的某一数值,以 表示相应位移,则当 F 增加 dF 时,
位移 也相应增加 d iF ,则在此微小阶段荷载 F 所做的元功为
dW (F d F )d F d d F d (a) 略去高阶微量,则元功又可表示为
dW F d
(b)
图10-4
图10-5
从几何角度上看,元功 dW 就是如图10-5 所示的窄条阴影面积。由于F 与 d iF 成 线性关系,若设 α 为比例常数,则有
W内 W内 l M d FQ d v FN du
(10-7)
1. 4 变形体的虚功原理
变形体处于平衡状态的必要和充分条件为:变形体上所有外力在其对应位移 上所做的外力虚功的总和等于各微段上内力在其对应变形上所做的内力虚功 W内 的 总和 ( 证明从略 ),即
W外 W内 将式 (10-6) 和式 (10-7) 代人式 (10-8),于是得
① 虚设位移,求力,故称为虚位移原理。若虚设单位位移,应用虚位移原 理求力的方法称为虚拟单位位移法。
② 虚设力系,求位移,故称为虚力原理。若虚设单位荷载,应用虚力原理 求位移的方法称为虚拟单位荷载法。
建筑力学
1. 2 实功与虚功
1. 实功与虚功的概念 力在某位移上所做的功根据位移产生的原因可分为如下两类: ① 实功:力在其自身引起的位移上所做的功; ② 虚功:力在其他因素引起的位移上所做的功。
2. 实功与虚功的计算
设图10-6 所示的简支梁,在其梁上 1 点作用由零增加至 F1 时,使梁产生弯 曲变形如虚线Ⅰ所示,则 1 点发生竖向 位移 Δ 11 是由 F1 上作用所引起的;当 F1 平稳后,又在其梁上 2 点作用力 F2 使梁 继续产生弯曲变形如实线Ⅱ所示,由于 F2 作用,则1点又发生竖向位移 Δ 12 。
变形体的虚功原理

22
12
虚: 并不是假的、不存在的,而是真的、 存在的。它只是表示位移 与力 之间不存在因果关系。
二、虚功原理
根据能量守恒原理有:
由于
改写为 外力虚功
,
, 因此
虚功原理 !
外力虚功在杆件中产生的变形能 ,关键是求
较好求,例如对本例
§5-2 变形体的虚功原理
三、 的求法
力状态(由P1引起) 微段力状态: + +
相对于P1
虚位移状态(由P2引起)
微段虚位移状态:
+
+
各微段力状态在相应微段虚位移状态所作的虚功
各微段中所产生的变形能
:轴向虚应变 :平均虚剪切角 :虚曲率 虚功原理
代入虚功方程 We U 得 We ( FN FQ 0 M )ds Wቤተ መጻሕፍቲ ባይዱ 外力虚功 内力虚功
当有多根杆件时, We
( FN ds FQ 0 ds M ds )
( F F
N Q
0
M )ds
由于因此虚功原理外力虚功外力虚功在杆件中产生的变形能改写为较好求例如对本例关键是求52变形体的虚功原理的求法代入虚功方程外力虚功内力虚功wffms各微段力状态在相应微段虚位移状态所作的虚功微段力状态
§5-2 变形体的虚功原理
一、虚功
: 实功
: 实功 : 虚功
虚位移 虚功
P P1 P P2 P P1
11
11.4 变形体的虚功原理[6页]
![11.4 变形体的虚功原理[6页]](https://img.taocdn.com/s3/m/121d3d52bf23482fb4daa58da0116c175f0e1e9f.png)
2. 虚位移原理
令实际的力状态在虚设的位移状态下做功所建立 的虚功方程表达的是力的平衡条件。从中可以求出实 际力系中的未知力。这就是虚位移原理。
例如:应用虚位移原理求支座C的反力FC。
A F yA
1
C B
令虚设的平衡力系在实际的位移状态下做功,得虚
功方程
Δ 1 c1 F yA 0
求得
Δ
c1 F yA
c1 (
b) a
b a
c1 ( )与单位力方向相同。
注意:虚力原理写出的虚功方程是一个几何方 程,可用于求解几何问题。
3. 虚力原理
令虚设的平衡力系在实际的位移状态下做功所 建立虚功方程表达的是位移协调条件,从中可求出 位移状态中的一些未知位移。这就是虚力原理(也称 为余虚功原理)。
例:当A支座向上移动一个 A'
c1
已知位移c1,求点B产生的竖向
位移⊿。
A
a
C
B
△
b
在拟求线位移的方向加单位力
由平衡条件 F yA b a
11.4 变形体的虚功原理
1. 虚功原理:
设一变形体在外力系作用下处于平衡状态。当变 形体由于其他原因产生一符合约束条件的微小连续位 移时,则外力系在位移上做的虚功的总和δWe,等于 变形体的内力在变形上做的虚功的总和δWi,即,
δWe δWi
——此即为虚功方程。
需注意:
⑴ 外力系必须是平衡力系,物体处于平衡状态;
⑵ 位移必须满足虚位移的条件——满足约束条件 的非常微小的连续位移;
结构力学-虚功原理和结构的位移计算

30 / 72
第九章 虚功原理和结构的位移计算 第四节 图乘法及其应用
受弯为主的构件位移计算常遇到积分公式:
∑ ∫ ΔiP =
MMP ds EI
称莫尔积分
在杆件数量多或荷载较复杂的情况下,不方 便。下面寻求一种简单的计算位移的法。
利用图形的静矩原理将图形积分变为图形相乘
31 / 72
第九章 虚功原理和结构的位移计算
6 / 72
第九章 虚功原理和结构的位移计算
第一节 位移计算概述
3、产生位移的主要原因 各种因素对静定结构的影响
内力
变形
位移
荷载
√
√
√
温度改变或 ×
√
√
材料胀缩
支座移动或 ×
×
√
制造误差
产生位移的主要原因主要三种:①荷载作用、②温度改变和材料胀
缩、③支座移动和制造误差。
7 / 72
第九章 虚功原理和结构的位移计算 第一节 位移计算概述 4 体系特征假定
虚功:力在非自身所产生的位移上所作的功。
(力与位移相互独立)
FP2 Δ22
FP1
Δ11 Δ12
W12 = FP1Δ12
(此过程力保持为常量)
虚功具体有两种情况:
1 作功双方其一是虚设的; 2 作功双方均是实际存在的,但彼此无关。11 / 72
第九章 虚功原理和结构的位移计算
第二节 变形体虚功原理
注意:
外力虚功
∑ We = 1 ⋅ Δk + FRi ⋅ ci
内力虚功
Wi = ∑ ∫ Mdϕ + ∑ ∫ FNdλ + ∑ ∫ FQdη
由虚功方程 We = Wi
Δk = ∑ ∫ Mdϕ + ∑ ∫ FNdλ + ∑ ∫ FQdη − ∑ FRici
变形体虚功原理
变形体虚功原理
变形体虚功原理是结构力学中的一个重要概念,它在分析和计算结构变形过程中起着重要作用。
变形体虚功原理是从能量角度出发,利用虚功原理来推导出结构的变形方程,从而可以通过能量方法来求解结构的变形和内力分布。
在工程实践中,变形体虚功原理被广泛应用于各种结构的分析和设计中。
首先,我们来了解一下虚功原理。
虚功原理是说,当一个结构处于平衡状态时,对这个结构施加一个微小的虚位移,所做的虚功等于零。
这个原理可以用数学公式表示为,δW=0,其中δW表示虚功,当结构受到外力和内力的作用时,对结构施加一个微小的虚位移,所做的虚功等于零。
在结构力学中,变形体虚功原理是指,在结构受力平衡的情况下,对结构进行微小的虚位移,所做的虚功等于零。
通过变形体虚功原理,我们可以得到结构的变形方程,从而可以求解结构的变形和内力分布。
变形体虚功原理的应用非常广泛,可以用于各种结构的分析和设计。
例如,在桥梁工程中,可以利用变形体虚功原理来分析桥梁
的变形和内力分布,从而指导桥梁的设计和施工。
在建筑工程中,可以利用变形体虚功原理来分析建筑结构的变形和内力分布,从而指导建筑结构的设计和施工。
在机械工程中,可以利用变形体虚功原理来分析机械结构的变形和内力分布,从而指导机械结构的设计和制造。
总之,变形体虚功原理是结构力学中的重要概念,它通过能量方法来分析和计算结构的变形和内力分布。
在工程实践中,变形体虚功原理被广泛应用于各种结构的分析和设计中,对于提高结构的安全性和经济性具有重要意义。
希望通过本文的介绍,读者能对变形体虚功原理有一个更加深入的理解,从而在工程实践中更好地应用这一理论。
变形体的虚功原理

点的竖向位移
Δ
,可虚拟一力状态如图所示。
CV
应用虚力原理建立虚功方程为 FΔCV FBy c=0
F
A
FAy
l
F
CV
a
b
l
FBy
a l
F
B
c
令F=1。得 ΔCV=
a c l
沿所求位移方向虚设单位荷载F=1的方法称为单位 荷载法,或称为单位力法。
当支座有给定位移时,静定结构的位移可用单位荷 载法来求解,其计算步骤如下:
1. 沿欲求位移的方向虚设相应的单位荷载,并求出 在单位荷载作用下给定位移的支座处的反力
2. 令虚拟力系在相应实际位移上作功,写出虚功方 程
3. 由虚功方程解出欲求位移。如果求得的位移为正 值,表明位移的实际方向与所设单位荷载的方向 一致;如果求得的位移为负值,表明位移的实际 方向与所设单位荷载的方向相反。
注意:在推导变形体的虚功方程时,并未涉及到材料 的物理性质,只要在小变形范围内,对于弹性、 塑性、线性、非线性的变形体系,上述虚功方 程都成立。
结构力学
FB
δB=1
图4.8
(a)
(2)虚拟力状态,求未知位移 在虚拟力状态和给定的实际位移状态之间应用虚 功原理,这种形式的虚功原理又称为虚力原理 。 【例4.2】 已知图4.9(a)所示静定梁的支座B向下移 动距离c,试用虚力原理求梁上点C的竖向位移。
图4.9
【解】静定结构在支座移动时只产生刚体位移。欲求C
三、 变形体的虚功原理
对于变形体系,如果力状态中的力系满足平衡条件, 位移状态中的位移和变形彼此协调、并与约束几何相 容,则体系的外力虚功等于体系的内力虚功,即
We= Wi We——外力虚功,即力状态的外力在位移状态的相 应位 移上所作的虚功总和; Wi——内力虚功,即力状态的内力在位移状态的相 应变形上所作的虚功总和。
变形体虚功原理

变形体虚功原理变形体虚功原理是工程力学中的重要理论之一,它是研究物体在受力作用下的变形规律的基础。
在实际工程中,我们经常需要对各种结构进行分析和设计,而变形体虚功原理则为我们提供了一种有效的方法来解决这些问题。
首先,让我们来了解一下什么是虚功原理。
虚功原理是指在静力学中,如果一个系统处于平衡状态,那么在系统的任意虚位移下,系统内的所有内力和外力的虚功之和为零。
虚位移是指系统中某一点的位移,它是一个虚拟的位移,不是真实的位移。
而虚功则是指在虚位移下各个力的功的总和,如果系统处于平衡状态,虚功总和为零。
在变形体虚功原理中,我们将虚功原理应用到弹性体的变形分析中。
当一个弹性体受到外力作用时,会发生形变,而根据虚功原理,我们可以通过对系统施加虚位移来分析弹性体的变形规律。
通过对虚功的计算,我们可以得到弹性体在受力作用下的位移、应变等重要参数,从而为工程设计提供依据。
变形体虚功原理在工程实践中有着广泛的应用,特别是在结构分析和设计中。
例如,在桥梁设计中,我们可以利用虚功原理来分析桥梁在受力作用下的变形情况,从而确定桥梁的合理结构和尺寸。
在机械设计中,虚功原理也可以用来分析零件的变形情况,从而保证机械零件的稳定性和可靠性。
除此之外,变形体虚功原理还可以应用于材料力学、土木工程、航空航天等领域。
通过对虚功原理的理解和运用,我们可以更加深入地理解物体在受力作用下的变形规律,为工程实践提供科学的分析方法。
总之,变形体虚功原理作为工程力学中的重要理论,为我们提供了一种有效的方法来分析物体在受力作用下的变形规律。
通过对虚功原理的理解和应用,我们可以更好地进行结构分析和设计,保证工程的安全性和稳定性。
希望本文对读者对变形体虚功原理有所帮助。
结构力学虚功基本知识和结构的位移计算

Bm
B
6
4、刚体虚功原刚理体在外力作用下处于平衡的充分必要条件是,对 于任意微小的虚位移,外力所作的虚功之和等于零。
W=0
二、虚功原理的应用 1)虚设位移求未知力(虚位移原理) 2)虚设力系求位移(虚力原理)
1、需设位移求静定结构的未知力(虚位移原理)
P
X X P P 0
A
C
B
X
P bP aX
种原因、不同的变形类型。
3) 该式右边四项乘积,当力与变形 的方向一致时,乘积取正。
11
t1
P2 K ΔKH
t2
K‘ Ε2γ2κ2
位移状态 2
c1
P=1
N QM
虚拟力状态 1
R1
12
§4·4荷载作用下的位移计算
一、荷载作用下的位移计算的一般公式与简化公式
↑↑↑↑↑↑↑↑↑↑↑↑
( ) iP
应用虚功原理求静定结构的某一约束力X的步骤: 1)撤除与X相应的约束,使静定结构变成具有一个自由度 的机构,使原来的约束力X变成主动力。 2)沿X方向虚设单位虚位移。作出机构可能发生的刚体虚 位移图;利用几何关系求出其它主动力对应的虚位移。 3)建立虚功方程,求未知力。
qa Fa
qa
8
qa2
q
↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓
Q
M
GEAIRd2θ
1 4
θ
h R
2
NP Psinq QP Pcosq
N sinq Q cosq
N
M
I AR 2
1 12
h R
2
P=1
3) M M Pds N NPds Q QPds 如 dsh=RR<d1θ10
变形体虚功原理
变形体虚功原理在物理学中,变形体虚功原理是一种重要的物理原理,它在研究弹性体和变形体的力学性质时起着至关重要的作用。
变形体虚功原理是指在弹性体或变形体受到外力作用下发生形变时,外力所做的虚功等于内能的增量。
这一原理的提出和应用,为我们理解和分析弹性体和变形体的力学性质提供了重要的理论基础。
首先,我们来看一下什么是虚功。
虚功是指在力学系统中,某些力在系统发生微小位移时所做的功。
对于一个系统在平衡状态下的微小位移,外力所做的虚功等于零。
而在变形体中,外力所做的虚功等于内能的增量,这就是变形体虚功原理的核心内容。
在实际的物理问题中,我们经常会遇到弹簧、弹性体等受力而发生形变的情况。
利用变形体虚功原理,我们可以很好地分析这些问题。
例如,当一个弹簧受到外力拉伸或压缩时,外力所做的虚功等于弹簧内能的增量,这可以用公式表示为:W = ΔU。
其中,W表示外力所做的虚功,ΔU表示内能的增量。
这个公式可以帮助我们计算弹簧的形变和受力情况,为工程设计和实际应用提供了重要的理论支持。
除了弹簧,变形体虚功原理还可以应用于其他形变体的研究中。
例如,在材料力学中,我们经常需要分析材料的拉伸、压缩、弯曲等变形情况。
利用变形体虚功原理,我们可以建立相应的力学模型,研究材料的力学性质,为材料的设计和选用提供理论依据。
总之,变形体虚功原理是物理学中一个重要的理论工具,它为我们理解和分析弹性体和变形体的力学性质提供了重要的理论基础。
通过应用这一原理,我们可以更好地分析和解决实际的物理问题,为工程设计和科学研究提供重要的理论支持。
希望通过本文的介绍,读者能对变形体虚功原理有一个更清晰的认识,进一步深入学习和研究相关领域的知识。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
F B MP
(b) FSP
F
(c)
1 B
(d) 1 FS M
R
FNP
"实际状态"
FN
"虚拟状态"
A R
A
图6-8 取分离体分别如图6-8源自b)、(d)所示。 M P = -FRsinφ M = Rsinφ, 且ds = Rdφ 3.代入式(6-7)计算ΔBy。
By M M P ds 1 EI EI
EA kFSP P ds ds GA MP d P ds EI
P
(b)
式中FNP、FSP、MP为“实际状态”中荷载引起的微段内力,
E为材料的弹性模量,I、A分别为杆件截面的惯性矩和面 积,G为剪切弹性模量,k为截面上剪应力分布不均匀系 数,它与截面的形状有关。如矩形截面k = 6/5,圆形截面k = 32/27,工字形截面k≈A/Af,Af是腹板的面积。将(b)式 代入(a)式得 F S FS P F N FN P MM P KP ds k ds ds(6-6) EI GA EA 在计算梁和刚架时,因剪切及轴向变形的影响比弯曲变形 小得多,可以略去不计,故式(6-6)可简化为 (6-7) MM P
图6-1
图6-2
l
2.计算结构位移的目的 (1)验算结构的刚度 结构在外因影响下如果变形太大,同样会影响结构的正常使 用,为此在各种结构的设计规范中,对结构的刚度都有一定的要 求。 (2)结构在施工过程中需要计算位移 结构在施工过程中,往往需要预先知道结构的变形情况,而 这种变形与结构正常使用时完全不同。如图6-3为悬臂拼装架梁 的示意图。在正常使用时,该简支梁的最大挠度在跨中,而在施 工时悬臂端B处的挠度最大,该挠度值也成为在结构设计时的控 制因素之一。
(a)
-10 2 A 10 C 2m 2m 2m 2m F
"实际状态"
N
F N FN P l =6.67×10-4rad(下面角度增大) , CD杆与CE杆 EA
10kN -10 0 E
2m
10kN D
(b)
2 2 A B
D 2 2
-1
E
(c)
0 A
1 2 2
D
1 2 2
1 2
1 2 2
E
1 2
水平及竖直两个方向,分别用ΔCx(或ΔCH)、ΔCy(或ΔCV)表示,如图61所示。角位移用fC(或θC)表示如图6-2所示。位移的表示符号右下方 有两个脚标,其物理意义为:第一个脚标表示发生位移的截面,第
二个脚标表示位移的方向(或引起位移的原因)。
位移又可分为绝对位移(如图6-1所示)及相对位移,如图
3
2 0
FR 3 R sin FR sin Rd EI
2 0
sin 2 d
FR 1 1 FR3 1 2 sin 2 2 2 EI 2 4 0 EI
FR 3
4 EI
例6-3 计算图6-9(a)所示桁架下弦C结点的竖向线位移 ΔCy、CD及CE两杆的相对角位移φC。各EA=3×104kN。 解: 由于桁架的杆件较多,一般多采用表格形式进行计 算。本题两种状态内力均为正对称,故表6-1中只列出一半 杆件内力。由式(6-8)得 ΔCy = F N FN P l =2×(9.43+6.67)×10-4+13.33×10-4 EA = 45.53×10-4m = 45.53×10-2cm(↓) φC = 夹角减小。
§6-2 变形体系的虚功原理
1.虚功和虚功原理 (1)虚功 力在其位移上做功,当力与位移彼此独立无关时,这时的 功称为虚功。 (2)刚体的虚功原理 理论力学中讲过刚体的虚功原理:刚体体系处于平衡的必 要和充分条件是,对于任何虚位移,所有外力所作虚功的总 和为零。 (3)变形体的虚功原理 对于变形体来讲,当给体系一虚位移时,除了外力(荷 载、约束反力等)在虚位移上做虚功外,内力在其相应的变形 上也要做功,这个功称为变形虚功。变形体的虚功原理可表 述为:变形体处于平衡的必要和充分条件是,对于任何虚位 移,外力所做虚功总和等于各微段的内力在其变形上所做的 虚功总和。
(6-5)
由(6-5)式可以看出,欲求“实际状态”的某一位移如 ΔK,则必须在“虚拟状态”加一个相应的单位力,然后利 用虚功原理求出ΔK,故此种计算位移的方法称为单位荷 载法。 F
K K FK=1 K
K'
C1
C3 C2
FR2 FR3 "实际状态" FR1 "虚拟状态"
图6-5
2. 单位力的作法 具体计算中,欲求的位移可能是角位移、相对线位移、 相对角位移,则对应的虚拟力应分别为一个单位力偶,一对 指向相反的单位力或一对方向相反的力偶(见图6-6),在桁架 中由于只承受结点集中荷载,当欲求图中BC杆转角时,虚 拟力则是加在BC杆两端结点垂直于杆轴线的一对集中力 1/lBC,它们组成一个单位力偶m = 1/lBC· = 1。 lBC
0 C
1 2 2 1 2 2
C 1 F
B
N
F (kN)
NP
"虚拟状态"
"虚拟状态"
图6-9
表6-1
杆件 l (m) EA
l 1 ( ) EA m
FNP FN
10 2 2
2 2 2
FNP FN l EA
FK K F Ri C i FN du FS ds M d
式中 FR i Ci FR 1C1 FR 2C2 FR 3C3 ; FN 、F S 、M 为单位力
FK 1 引起的内力(在虚拟状态),上式移项后可得
K F N du F S ds M d F R i C i
故虚功方程为: W=Σ∫ dWV=Σ∫ FNdu+Σ∫ FSγds+Σ∫ Mdf
(a)
F1 F2 q
(6-3)
M M+dM
(c) FN
B
FR1
A
ds
FN+dFN FS
ds
FS+dFS
FR2
"力状态"
FR3
(b)
(d)
·2
ds
d 2
d 2
A
ds
B
ds ds 2 ds 2
·2
ds
"位移状态"
图6-4
3. 虚功原理的应用 (1) 虚位移原理 给定力状态,虚设位移状态,利用虚功方程来求解力 状态的未知力,称为虚位移原理。 (2) 虚力原理 给定位移状态,虚设力状态,利用虚功方程求解位移状 态中的位移,称为虚力原理。本章将根据这一原理计算 位移。
KP EI ds
在桁架计算中,因只有轴力一项,且每根杆EA、 N 、 NP 、l均 F F 为常数,故式(6-6)可写为 F N FN P F N FN P F N FN P l (6-8) ds ds
KP
EA
EA
EA
对于组合结构,受弯杆件只计弯曲变形的影响,二力杆只 有轴向变形,则式(6-6)可写为 F N FN P l MM P (6-9) KP ds
§6-3 位移计算的一般公式 单位荷载法
1. 单位荷载法
在利用虚力原理时,由于力状态是虚设的,故将上节所
述力状态改称为“虚拟状态”,位移状态改称为“实际状
态”。为了计算方便,在“虚拟状态”沿欲求“实际状态” 的指定截面位移方向ΔK加一个对应的单位力 FK 1 ,如图
6-5所示。根据(6-1)、(6-3)式可得
5ql 4 () 384 EI
计算结果得正值说明ΔCy的方向与虚拟力方向一致, 数据后面一定要注明所求位移的实际方向。 例6-2 求图6-8(a)所示圆弧曲杆B点的竖向线位ΔBy。 EI=常量,不计轴力及曲率的影响。 解:1.建立虚拟状态如图6-8(c)所示。 2.写出M P 、M 表达式。
(a)
6-2中C、D两截面的水平线位移ΔCx、ΔDx之和ΔCD=ΔCx+ΔDx表示
C、D两截面在水平方向上的相对线位移,又如 fAB=fA+fB表示A、B两截面的相对转角。无论是绝对位移或相对 位移,今后统称为广义位移,可用Δ表示。
q B
c
C C'
c c cy
C
cx
Dx
D
F
cx
A
A B
B
A
(a)
(b)
(c)
B B 1 C 1 C A B 1 1 1 lCB 1 B C 1 lCB
求
求
求
求CB杆转角
图6-6
§6-4 静定结构在荷载作用下的位移计算
式(6-5)中的du、γds、dφ为“实际状态”中ds微段的变 形,该变形可以由荷载引起或温度变化或支座移动等原因 引起。本节先讨论荷载的影响,其它因素将在后面各节分 述。 当只考虑荷载的影响时,式(6-5)可写为 (a) KP F N du P F S P ds M d P 由材力可知: du FNP ds
临时联结杆件
图6-3
(3)为超静定结构的计算打基础 在超静定结构的计算中,除考虑平衡条件外,还必须考虑 变形协调条件,因此计算结构的位移是解超静定结构的一个 重要手段。 (4)结构的动力计算和稳定计算中也需要计算结构的移。 3.计算位移时的有关假定 (1) 结构的材料服从虎克定理。即应力与应变呈线性关系。 (2) 结构的变形很小,可以认为结构变形前后的几何尺寸 相同,称为弹性小变形问题。 (3) 受弯杆件不考虑轴向变形的影响。 上述假定可使位移计算得到简化,其计算精度可以满足工 程要求。满足上述假定的体系其位移与荷载呈线性关系,称 为线性变形体。若位移与荷载之间不呈线性关系的体系称为 非线性变形体。本书只考虑线性变形体。 4.引起结构产生位移的原因除荷载外,还有温度变化、支 座移动、制造误差、混凝土收缩等因素。