西门子111报文详解
epos的111报文解析 -回复

epos的111报文解析-回复Epos的111报文解析Epos(Electronic Point of Sale)是一种电子销售点系统,主要用于零售行业的销售和库存管理。
111报文是Epos系统中的一种报文类型,用于传输销售交易的相关信息。
本文将一步一步解析111报文的内容和使用。
第一步:理解Epos系统和111报文的背景Epos系统是一种用于零售行业的销售点系统,可以追踪和管理销售交易、库存、价格等信息。
111报文是Epos系统中的一种报文类型,用于传输销售交易的相关信息。
对于零售商来说,了解111报文的内容和使用,有助于提高销售业绩和管理效率。
第二步:了解111报文的结构和字段111报文是一个结构化的文本报文,包含多个字段,每个字段都有特定的含义和用途。
常见的111报文字段包括:1. 交易日期:记录销售交易发生的日期。
2. 交易时间:记录销售交易发生的时间。
3. 交易编号:标识销售交易的唯一编号。
4. 商品编号:标识销售商品的唯一编号。
5. 商品名称:记录销售商品的名称。
6. 商品数量:记录销售商品的数量。
7. 商品单价:记录销售商品的单价。
8. 交易总金额:记录销售交易的总金额。
9. 支付方式:记录客户选择的支付方式,如现金、信用卡等。
10. 顾客编号:记录购买商品的顾客的唯一编号。
11. 销售员编号:记录完成销售交易的销售员的唯一编号。
12. 折扣金额:记录销售交易中应用的折扣金额。
13. 促销活动编号:记录应用于销售交易的促销活动的唯一编号。
第三步:示例解析一个111报文假设有一个111报文如下所示:[111]交易日期=20220101交易时间=0900交易编号=1234567890商品编号=001商品名称=手机商品数量=2商品单价=2000交易总金额=4000支付方式=信用卡顾客编号=12345销售员编号=56789折扣金额=200促销活动编号=7890根据以上报文,我们可以解析出以下信息:该销售交易发生在2022年1月1日的上午9点,交易编号为1234567890,销售了两台编号为001的手机,单价为2000元,总金额为4000元。
V90伺服111报文插入及使用学习资料

V90伺服111报文插
入及使用
西门子V90伺服111报文
的插入及使用
软件版本:TIA V14 SP1 Professional
1、在硬件目录依次找到“其他现场设备”、“PROFINET IO”、“Drives”、“SIEMENS AG”、“SINAMICS”
2、在“SINAMICS”中最后一个设备可以看到V90伺服,将其拖入网络视图中,如下图所示
3、进入伺服设备视图,选择“以太网址”,设置“子网”和“IP地址”
4、子网设置好,回到网络视图,点击伺服上的“未分配”,可以看见跳出两个选择,点击“PLC_1.PROFINET借口_1”
5、选择好后,就将该伺服控制器与PLC_1连接起来了,完成效果如下图所示,下面还需将该伺服组态与伺服控制指令块匹配
6、回到伺服设备视图,向左拉出右侧设备概览图,从右侧的子模块里选取“西门子报文111,PZD-12/12”,拖到伺服的设备概览图
7、报文拖进以后,查看报文属性,选择“硬件标识符”,可以看到该报文标识符为“280”,下面需要用到此标识符
8、在程序段里,插入FB284-“SINA_POS”伺服控制指令,该指令可以从右侧全局库里的“Drive_Lib_S7_1200_1500”,“主模板”,“03_SINAMCS”中找到
9、为了将该FB284指令块与上面的伺服设备匹配,将HWIDSTW,HWIDZSW 设为报文标识符280。
美化西门子标准报文1通信规约 10页

变频器传递十进制有符号整数 16384(4000H 十六进制) 对应于 100%的速度,最大速度为 32767(200%),PLC读取 变频器转速值后,要经过标准化才能得到实际转速。
谢谢聆听
标准报文1:转速控制
STW1 ZSW1
NSOLL_A NIST_A
西门子标准报文1通信规约 西门子标准报文1控制字
西门子标准报文1通信规约 西门子标准报文1控制字
西门子标准报文1通信规约 西门子标准报文1状态字
西门子标准报文1通信规约 西门子标准报文1状态字
西门子标准报文1通信规约
西门子标准报文1应用
变频起停:
16#047E 变频器停止 16#047F 变频器起动
速度设定:
速度设定值要经过标准化,变频器接收十进制有符号整 数 16384(4000H 十六进制)对应于 100%的速度,接收的最 大速度为 32767(200%)。
西门子标准报文1通信规约
西门子标准报文1应用
变频状态:
读取状态字可知变频器运行状态,变频器是否运行,正 反转等。
西门子标准报文1通信规约源自 西门子标准报文1通信规约CONTENTS
1 西门子标准报文1概述 2 西门子标准报文1控制字 3 西门子标准报文1状态字 4 西门子标准报文1应用
西门子标准报文1通信规约
西门子标准报文1概述
在西门子自动化系统中,PLC经常以通信方式与底层变频器交换数据,控制变频 器起动和停止,并通过网络获取电机运行状态。
西门子111报文详解

西门子111报文详解Drive01_STW1_BIT11BOOL FALSE Drive01_STW1_BIT12BOOL FALSE Drive01_STW1_BIT13BOOL FALSE Drive01_STW1_BIT14BOOL FALSE Drive01_STW1_BIT15BOOL FALSE Drive01_STW1_BIT0BOOL FALSE Drive01_STW1_BIT1BOOL TRUE Drive01_STW1_BIT2BOOL TRUE Drive01_STW1_BIT3BOOL TRUE Drive01_STW1_BIT4BOOL TRUE Drive01_STW1_BIT5BOOL TRUE Drive01_STW1_BIT6BOOL FALSE Drive01_STW1_BIT7BOOL FALSE Drive01_POS_STW1_BIT8BOOL FALSE Drive01_POS_STW1_BIT9BOOL FALSE Drive01_POS_STW1_BIT10BOOL FALSE Drive01_POS_STW1_BIT11BOOL FALSE Drive01_POS_STW1_BIT12BOOL FALSE Drive01_POS_STW1_BIT13BOOL FALSE Drive01_POS_STW1_BIT14BOOL FALSE Drive01_POS_STW1_BIT15BOOL FALSE Drive01_POS_STW1_BIT0BOOL FALSE Drive01_POS_STW1_BIT1BOOL FALSE Drive01_POS_STW1_BIT2BOOL FALSE Drive01_POS_STW1_BIT3BOOL FALSE Drive01_POS_STW1_BIT4BOOL FALSE Drive01_POS_STW1_BIT5BOOL FALSE Drive01_POS_STW1_BIT6BOOL FALSE Drive01_POS_STW1_BIT7BOOL FALSE Drive01_POS_STW2_BIT8BOOL FALSE Drive01_POS_STW2_BIT9BOOL FALSE Drive01_POS_STW2_BIT10BOOL FALSE Drive01_POS_STW2_BIT11BOOL FALSEDrive01_POS_STW2_BIT12BOOL FALSE Drive01_POS_STW2_BIT13BOOL FALSE Drive01_POS_STW2_BIT14BOOL FALSE Drive01_POS_STW2_BIT15BOOL FALSE Drive01_POS_STW2_BIT0BOOL FALSE Drive01_POS_STW2_BIT1BOOL FALSE Drive01_POS_STW2_BIT2BOOL FALSE Drive01_POS_STW2_BIT3BOOL FALSE Drive01_POS_STW2_BIT4BOOL FALSE Drive01_POS_STW2_BIT5BOOL FALSE Drive01_POS_STW2_BIT6BOOL FALSE Drive01_POS_STW2_BIT7BOOL FALSE Drive01_STW2_BIT8BOOL FALSE Drive01_STW2_BIT9BOOL FALSE Drive01_STW2_BIT10BOOL FALSE Drive01_STW2_BIT11BOOL FALSE Drive01_STW2_BIT12BOOL FALSE Drive01_STW2_BIT13BOOL FALSEDrive01_STW2_BIT1BOOL FALSE Drive01_STW2_BIT2BOOL FALSE Drive01_STW2_BIT3BOOL FALSE Drive01_STW2_BIT4BOOL FALSE Drive01_STW2_BIT5BOOL FALSE Drive01_STW2_BIT6BOOL FALSE Drive01_STW2_BIT7BOOL FALSE Drive01_OVERRIDE WORD W#16#100 Drive01_MDI_TARPOS DWORD DW#16#0 Drive01_MDI_VELOCITY DWORD DW#16#0 Drive01_MDI_ACC WORD W#16#0 Drive01_MDI_DEC WORD W#16#0 Drive01_FREE_W WORD W#16#0 Drive01_ZSW1WORD W#16#0 Drive01_POS_ZSW1WORD W#16#0 Drive01_POS_ZSW2WORD W#16#0 Drive01_ZSW2WORD W#16#0 MELDW WORD W#16#0 Drive01_XIST_A DWORD DW#16#0 Drive01_XIST_B DWORD DW#16#0 Drive01_FAULT_CODE WORD W#16#0 Drive01_WARN_CODE WORD W#16#0 Drive01_FREE_R WORD W#16#0//JOG1 点动命令 p2589=r2090.8//JOG2 点动命令 p2590=r2090.9control via plc; p0854=r2090.10;//启动回零 p2595=r2090.11reserved ;/ external block change P2632=1;P2633=r2090.13//p2613=r2090.14//p2614=r2090.15//启动变频器;p0840=r2090.0OFF2;P0844=r2090.1OFF3; P0848=r2090.2enable operation; p0852=r2090.3//P2641=r2090.4: 0: 停止当前任务,以最大减速度 p2573 停机//P2640=r2090.5: 0: 停止命令,以 P2645 的减速度停车//P2650=r2090.6: 数据输入开关,上升沿进行单步数据传输//激活 traversing block, P acknowledge fault; p2103=r2090.7 //p2648=r2091.8: 1: 绝对位置模式;0:相对位置模式//P2651=r2091.9: 速度模式正向运行//P2652=r2091.10: 速度模式反向运行reserved//p2649=r2091.12: 1: 连续数据传输; 0:单步运行reserved//MDI 模式选择, P2653=r2091.14 0:位置模式 1:速度模式//激活MDI, P2647=r2091.15//选择程序步 bit0: p2625=r2091.0//选择程序步 bit1: p2626=r2091.1//选择程序步 bit2: p2626=r2091.2//选择程序步 bit3: p2626=r2091.3//选择程序步 bit4: p2626=r2091.4//选择程序步 bit5: p2626=r2091.5reservedreserved//回零方式(0:Active homing;1: passive homing); p2597=r2092.8//回零启动时的方向(0:从正向开始回零;1:从反向开始回零);p2604=r2092.9//external block change p2632=0; p2510=r2092.10//external block change p2632=0; p2511=r2092.11reservedreserved//p2582=r2092.14 软限位开关激活//p2568=r2092.15 stop cam 激活//p2655[0]=r2092.0 激活 tracking mode//将当前位置直接设置成零点 p2596=r2092.1//CAM 信号 p2612=r2092.2reservedreserved//点动模式 p2591=r2092.5reservedreservedreservedreservedreserved//电机切换的反馈信号,p0828=r2093.11//p2045=r2050[3];profidrive 时钟同步信号//p2045=r2050[3];profidrive 时钟同步信号//p2045=r2050[3];profidrive 时钟同步信号//p2045=r2050[3];profidrive 时钟同步信号//驱动数据组切换 p0820[0]=r2093.0//驱动数据组切换 p0821[0]=r2093.1//驱动数据组切换 p0822[0]=r2093.2//驱动数据组切换 p0823[0]=r2093.3//驱动数据组切换 p0824[0]=r2093.4reservedreserved//parking axis; p0897=r2093.7Drive01_OVERRIDE 对应r2050[4];p2646=r2050[4]; 需要设置一个值,//p2642=r2060[5] MDI 位置给定(单位:LU);//p2643=r2060[7] MDI 速度给定(单位:1000LU/min)//2644=r2050[9] MDI 加速度(4000h 对应100%)//2645=r2050[10] MDI 减速度(4000h 对应100%)//自由连接的过程数据字p2051[0]=r2089[0]=p2080[0...15]p2051[1]=r2089[3]=p2083[0...15]p2051[2]=r2089[4]=p2084[0...15]p2051[3]=r2089[1]=p2081[0...15]p2051[4]=r2089[2]=p2082[0...15]p2061[5]=r2521 位置实际值p2061[7]=r0063[0] 转速实际值p2051[9]=r2131p2051[10]r2132自由连接。
基于S120伺服驱动模块111报文的西门子S7-300程序模块设计
基于S120伺服驱动模块111报文的西门子S7-300程序模块设计高挺;朱晓民;张希;程金【摘要】针对自动化系统中集成S120伺服驱动模块时遇到的控制及通讯难题,设计了基于111报文的S7-300通讯控制程序模块Servo120。
使得从事自动化工作的工程师可以通过该模块简单、快捷的实现S7控制系统与S120伺服驱动模块的通讯,并通过报文方式实现S7-300PLC对S120伺服驱动模块的速度与位置控制。
模块对报文中的控制及状态字进行详细解析,大大提高了调试诊断效率。
并设置了多点联动,速度转换等模式,极大的方便了现场应用,提高了系统集成过程的效率并降低了操作难度。
【期刊名称】《制造业自动化》【年(卷),期】2016(038)010【总页数】3页(P67-69)【关键词】S120伺服驱动模块;111报文;程序模块【作者】高挺;朱晓民;张希;程金【作者单位】北京机械工业自动化研究所,北京100120;北京机械工业自动化研究所,北京100120;北京机械工业自动化研究所,北京100120;北京机械工业自动化研究所,北京100120【正文语种】中文【中图分类】TP23当今,企业对生产设备的要求是设备生产成本越来越低,但同时能够提供越来越高的生产效率。
SINAMICSS120伺服驱动模块因恰恰能满足这些方面的要求而被广泛应用于自动化系统中。
对于自动化系统集成商而言,伺服系统的好处虽然很多,但其与中央控制器的融合过程往往因工程师经验不足等原因而变得比较困难。
本文以S7-300与S120通讯的111报文为基础,对其进行深入解读,设计出一款专用通讯控制程序模块。
为S120伺服驱动模块在以S7-300为核心的自动化系统中的应用带来了极大的便利。
通讯控制程序模块的设计是基于S7-300的PLC与S120通讯111报文的,因此模块环境平台的搭建如下:在S7硬件中配置S120硬件(如图1硬件配置),在整个项目中集成S7-300CPU作为整个系统的核心控制器、S120伺服驱动模块、MP277人机交互触摸屏系统(如图2项目配置),以图3网络连接所示的方式通过PROFIBUS网络组成统一的系统。
epos的111报文解析
EPOS的111报文是带扩展功能定位运行报文,常用于EPOS的控制。
以下是关于111报文的解析:
报文数据格式:111报文由12个接受/发送字组成,每个控制/状态字的含义不同。
具体的报文数据格式可以查阅相关的技术文档或手册。
EPOS功能与111报文的对应关系:EPOS的几种运行模式就是通过对111报文的IO读写实现的。
具体的对应关系可以参考相关的技术手册或文档。
报文控制字和状态字的详细描述:控制字和状态字是111报文中的重要组成部分,它们的详细描述和含义可以参考相关的技术手册或文档。
EPOS各功能配合111报文的具体实现:具体的实现方式可以参考相关的技术手册或文档,了解如何通过操作111报文实现EPOS的各种功能。
总之,要深入理解并掌握EPOS的111报文,需要具备一定的技术背景和基础知识,同时还需要查阅相关的技术文档或手册,进行实践和探索。
如有更深入的需求,建议咨询专业技术人员或厂家。
111报文lu换算
111报文lu换算摘要:1.了解111报文的概念2.111报文与换算关系3.111报文的应用场景4.111报文的换算方法5.换算实例与步骤6.总结正文:在日常的通信和数据传输中,111报文是一种常见的数据格式。
它作为一种标准化报文,广泛应用于各种通信协议中。
本文将介绍111报文的概念、应用场景、换算方法以及实际换算实例,帮助大家更好地理解和使用111报文。
一、了解111报文的概念111报文,顾名思义,是一种由三个1组成的报文。
在通信领域,它通常表示一种简单的数据传输格式。
这种报文具有结构简单、易于识别的特点,因此在很多场景中都能发挥作用。
二、111报文与换算关系在111报文中,每个1都可以看作是一个单位。
因此,当我们需要对111报文进行换算时,可以将其转换为相应的单位数量。
三、111报文的应用场景111报文广泛应用于各种通信协议中,如TCP/IP协议、串口通信等。
在这些场景中,111报文作为一种基本的数据传输格式,为信息的传输提供了便利。
四、111报文的换算方法要对111报文进行换算,我们需要明确换算的目的是什么。
一般情况下,换算的目的有两种:一种是将111报文转换为其他格式的报文,另一种是将111报文中的单位转换为其他单位。
1.报文格式换算:根据实际需求,将111报文中的数据单元替换为其他数据单元,例如将111报文转换为222报文。
2.单位换算:根据实际需求,将111报文中的单位转换为其他单位,例如将毫米换算为厘米。
五、换算实例与步骤以下是一个111报文换算实例:将100个111报文(每个111报文包含3个1)换算为200个111报文。
步骤:1.统计原有111报文的数量,本例中为100个。
2.计算新报文数量,本例中为200个。
3.将原有111报文按照比例增加到新报文中,本例中为将100个111报文增加到200个。
六、总结通过对111报文的概念、应用场景、换算方法以及实例的分析,我们可以发现111报文在通信和数据传输领域具有重要作用。
S120通过111报文实现基本定位功能

S120 通过 111 报文来实现 Basic Position 功能S120 Basic Position Function using Standard Telegram 111摘要本文介绍了如何通过西门子标准报文 111来实现 SINAMICS S120 的基本定位功能,较为详细地介绍了点动、回零、限位、程序步以及 MDI 功能。
关键词 SINAMICS S120、基本定位、标准报文 111Key Words SINAMICS S120、Basic Position、standard telegram 111IA&DT Service & Support Page 2-26目录1.概述 (4)2.激活基本定位功能 (4)3. 基本定位_点动(JOG) (7)4. 基本定位_回零(Homing) (9)4.1 设置参考点 (Set_Reference) (9)4.2 主动回零 (Active_homing) (10)5. 基本定位_手动数据输入(MDI) (16)6. 基本定位_程序步(Traversing Blocks) (17)IA&DT Service & Support Page 3-261.概述S120 有两种形式:用于多轴系统的 DC/AC 装置用于单轴系统的 AC/AC 装置这两种形式的S120,在 Firmware V2.4 及以上版本都已具备基本定位功能。
SINAMICSS120 基本定位功能包括如下内容:• 点动 (Jog):用于手动方式移动轴,通过按钮使轴运行至目标点• 回零 (Homing/Reference):用于定义轴的参考点或运行中回零• 限位 (Limits):用于限制轴的速度、位置。
包括软限位、硬限位• 程序步 (Traversing Blocks):共64个程序步,可自动连续执行一个完整的程序也可单步执行• 直接设定值输入/手动设定值输入 (Direct Setpoint Input / MDI):目标位置及运行速度可由上位机实时控制。
西门子111报文详细
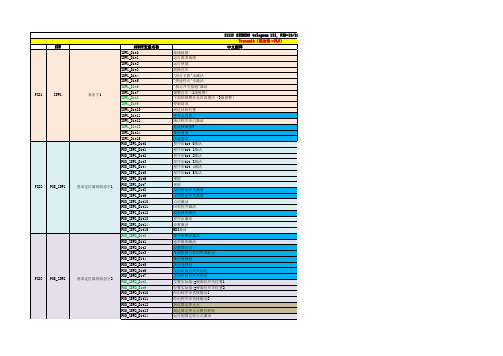
SCOUT变量名称 STW1_Bit0 STW1_Bit1 STW1_Bit2 STW1_Bit3 STW1_Bit4 STW1_Bit5 STW1_Bit6 STW1_Bit7
[111] SIEMENS telegram 111, PZD-12/12 Receive(PLC→驱动器)
中文 轴的运行命令/变频器启动 "无滑行下降"命令 "无快速停止"命令 运行使能(脉冲使能与封锁) 停止任务 1:不激活 0:激活 停止命令 1:不激活 0:激活 激活程序步任务 故障确认
运行命令激活 驱动数据设置bit 0有效 驱动数据设置bit 1有效 驱动数据设置bit 2有效 驱动数据设置bit 3有效 驱动数据设置bit 4有效 报警分类bit 0 报警分类bit 1 轴停车命令激活 运行到固定点停止激活 预留 脉冲使能 电动机转换激活 从站时钟同步bit 0 从站时钟同步bit 1 从站时钟同步bit 2 从站时钟同步bit 3 斜坡上升/斜坡下降完成 转矩利用 < 转矩极限值 |n_act| < 速率极限值3 |n_act| < 速率极限值2 p2155 电压-数字变换器控制器激活 信号发生器输出信号 超温报警 电源单元热过载报警 速度实际运行值偏差在“t_on”公差内 预留 预留 控制器使能 驱动器准备好 脉冲使能 预留 预留 位置实际值 速度实际值 故障代码 警告代码
点动1命令 点动2命令 通过PLC控制驱动器 启动回参考点命令 预留 外部块变化 预留 预留 选择程序步 bit0 选择程序步 bit1 选择程序步 bit2 选择程序步 bit3 选择程序步 bit4 选择程序步 bit5 预留 预留 直接数据输入/MDI_定位模式 1:绝对位置 0:相对位置 直接数据输入/MDI_方向选择 正向 直接数据输入/MDI_方向选择 反向 预留 直接数据输入/MDI_数据传输方式 1:连续 0:单步 预留 直接数据输入/MDI_设置选择 1:速度模式 0:位置模式 直接数据输入/MDI_选择(激活MDI功能) 激活程序步模式 激活轴的“设置参考点”命令,将当前位置设置成零位。 参考点挡块信号 预留 预留 设置点动模式 0:速度模式 1:位置模式 预留 预留 选择回参考点方式 0:主动回零 1:被动回零 设置寻参考点方向 0:正向回零 1:反向回零 选择测量探头的评估,闭环位置控制 测量探头评价优势,闭环位置控制 预留 预留 激活软限位 激活硬限位 驱动数据设置 bit 0 驱动数据设置 bit 1 驱动数据设置 bit 2 驱动数据设置 bit 3 驱动数据设置 bit 4 预留 预留 轴停车命令 预留 预留
博途FB284的应用及S120使用111报文实现电机位置定位

伺服电机通过111报文进行位置定位目录目的: (2)一、硬件配置 (2)二、定位模式的手动调试: (3)三、使用FB284调试 (6)1、 相对定位 (7)2、 绝对定位 (9)3、 连续运行模式(以设定速度带位置环连续运行) (10)4、 主动回零点 (11)5、 直接设置零点 (11)四、使用111报文直接控制电机(或自由通信报文) (12)1、相对定位和绝对定位的控制字: (15)1、 绝对定位的控制字(见前节<相对定位和绝对定位>已述) (17)2、 连续运行的控制字 (17)4、主动回零的控制字 (19)5、直接设定零点(参考点)的控制字 (19)五、过程中容易出现的问题: (21)问题1: (21)问题2: (21)问题4: (22)重点问题: (24)伺服电机通过111报文进行位置定位目的:通过SCOUT进行定位使用FB284库函数定位的方式,控制电机的位置。
使用111报文进行电机定位。
一、硬件配置Scout配置轴的报文时,需要配置为111报文才能使用FB284功能库。
要选中111报文,在配置轴的时候必须勾选Basic positioner。
PLC的配置详见后文。
二、定位模式的手动调试:配置好后,在控制面板可对轴进行手动调试:是jog和setup mode调试,可在上图JOG的下拉菜单中选择,选择JOG时,必须按住才能运转,一松开则电机按设定的减速度停止。
选择setup mode时,直接按start就可以按设定的速度一直运行。
选择上图下拉菜单,n setpoint specification是速度模式,设定值是**转/分。
而若选择Basic positioner,那设置值的单位是LU(Load的定位长度单位),我们在SCOUT里的position control下的Mechanics里,LU Per load revolution可以配置的最大值不能超过Encoder PPR值*Fine resolution的值,即在下面右图中是512*2048=1048576,设置的值越大,在相同的定位电机速度V例如600个1000LU的设定下,轴和负载的转速越慢,又因为这里Load:Motor=1:1,负载和轴的转速都相当于60*1000/1048576=0.0009536转/分)。
111报文转速极限值

111报文转速极限值111报文是一种用于在汽车中传递信息的通信协议。
在汽车的电控系统中,各个子系统可以通过111报文来进行通信,以实现各种功能。
在111报文中,转速极限值是一个重要的参数,它能够帮助汽车系统监控引擎的运行状态,保证发动机的工作在安全和可靠的范围内。
本文将从以下几个方面详细介绍111报文转速极限值的意义和作用。
首先,111报文转速极限值对于保护发动机的安全运行非常重要。
发动机在运行过程中,转速过高或过低都可能对发动机的工作产生不良影响。
当发动机转速过高时,会产生过热、过载等问题,可能导致发动机的损坏甚至爆炸。
而当发动机转速过低时,则可能导致发动机失去动力,无法正常工作。
因此,通过设定转速极限值,可以在发动机超出安全范围时及时进行控制和保护,避免潜在的危险。
其次,111报文转速极限值可以用于实现发动机性能优化。
在汽车领域,性能优化一直是一个重要的研究方向。
通过对发动机运行参数的控制和调节,可以提高汽车的性能表现。
转速是发动机运行的重要指标之一,通过设定适当的转速极限值,可以实现对发动机的优化控制。
例如,当发动机处于高转速状态时,可以通过增加燃料喷射量等方式来增加发动机输出功率,提高汽车的加速性能。
而在低转速状态下,可以通过适当调整燃油供给量等方式来提高发动机的燃烧效率,降低油耗。
另外,111报文转速极限值也与车辆的排放控制相关。
在现代社会,环境保护逐渐成为人们关注的焦点。
汽车作为一个主要的污染源之一,其排放控制非常重要。
发动机转速的变化会直接影响到废气排放的含量和质量。
当转速过高时,燃烧不完全可能会产生大量的有害物质,如CO、HC等,对环境造成污染。
而设定适当的转速极限值,可以避免这种过高转速带来的排放问题,降低废气排放的数量和污染物含量,保护环境。
此外,111报文转速极限值对于车辆的性能监控和故障诊断也非常重要。
通过实时监测和记录发动机的转速数据,可以及时发现和诊断潜在故障。
如果发现发动机在运行过程中频繁超过设定的转速极限值,可能意味着发动机或其他相关部件存在故障或异常情况。
111报文转速极限值

111报文转速极限值【原创版】目录1.111 报文转速极限值的定义2.111 报文转速极限值的作用3.111 报文转速极限值的计算方法4.111 报文转速极限值在实际应用中的例子5.111 报文转速极限值的未来发展趋势正文1.111 报文转速极限值的定义111 报文转速极限值,是指在通信领域中,一种用于衡量数据传输速度的标准。
它通常用来表示在特定的网络环境下,所能传输的最大数据量。
这个值可以帮助通信工程师更好地了解和规划网络的性能,以满足不同应用场景的需求。
2.111 报文转速极限值的作用111 报文转速极限值在通信系统中具有重要的作用,主要体现在以下几个方面:(1)优化网络性能:通过提高报文转速极限值,可以提升网络的传输效率,降低数据传输的延迟,从而优化整个网络的性能。
(2)保障数据传输质量:当网络中的数据传输速度接近或达到报文转速极限值时,通信系统可能会出现拥塞现象,导致数据包丢失。
因此,合理设置报文转速极限值有助于保障数据传输质量。
(3)提高资源利用率:通过调整报文转速极限值,可以有效地分配网络资源,避免某些应用过度占用资源,从而提高整个网络的资源利用率。
3.111 报文转速极限值的计算方法111 报文转速极限值的计算方法较为复杂,通常需要考虑以下几个因素:(1)网络带宽:网络带宽是影响报文转速极限值的重要因素,通常情况下,报文转速极限值不应超过网络带宽的 50%。
(2)传输距离:传输距离的增加会导致信号衰减,从而降低数据传输速度。
因此,在计算报文转速极限值时,需要考虑传输距离对数据传输速度的影响。
(3)通信协议:不同的通信协议对数据传输速度有不同的要求,因此在计算报文转速极限值时,需要根据具体的通信协议进行调整。
4.111 报文转速极限值在实际应用中的例子以 5G 通信技术为例,其报文转速极限值可以达到每秒 20G 比特,这是由于 5G 通信技术采用了更高的频谱效率、更先进的调制解调技术和更智能的网络管理策略,从而实现了更高的数据传输速度。
111和121 swift报文

111和121 swift报文
2017年交易中心交易后处理平台推出SWIFT报文匹配业务支持通过SWIFT交易确认报文实施交易确认。
SWIFT报文匹配是指参与主体将收到和发出的SWIFT交易确认报文通过Confirmation Copy服务等途径传输至交易中心交易中心根据预设的匹配规则对报文进行匹
配并通过交易后处理平台或交易确认接口向参与主体反馈匹配结果。
SWIFT为交易中心提供相关的技术咨询、网络平台和报文标准等方面的支持。
SWIFT报文匹配业务有利于参与主体提高报文匹配效率、降低人工成本和操作风险与交易中心现有确认服务一起为参与主体构建“一站式”管理平台。
同时交易中心SWIFT报文匹配业务可实现灵活的自定义匹配规则、具备高效准确的检索配对能力并支持交易确认接口直通式处理。
该业务上线以来运行稳定业务处理量和参与主体稳步增加。
截止2019年交易中心SWIFT报文匹配业务支持MT300、MT320、MT305等7类SWIFT确认报文处理报文量累计近50万余笔。
目前国家20多家市场成员参与该项业务。
xx银行上线交易确认报文匹配接口系统通过接口交互实现报文匹配到支付环节的自动化处理。
V90伺服111报文插入及使用

西门子V90伺服111报文
的插入及使用
软件版本:TIAV14SP1Professional
1、在硬件目录依次找到“其他现场设备”、“PROFINETIO”、“Drives”、“SIEMENSAG”、“SINAMICS”
2、在“SINAMICS”中最后一个设备可以看到V90伺服,将其拖入网络视图中,如下图所示
3、进入伺服设备视图,选择“以太网址”,设置“子网”和“IP地址”
4、子网设置好,回到网络视图,点击伺服上的“未分配”,可以看见跳出两个选择,点击“PLC_1.PROFINET借口_1”
5、选择好后,就将该伺服控制器与PLC_1连接起来了,完成效果如下图所示,下面还需将该伺服组态与伺服控制指令块匹配
6、回到伺服设备视图,向左拉出右侧设备概览图,从右侧的子模块里选取“西门子报文111,PZD-12/12”,拖到伺服的设备概览图
7、报文拖进以后,查看报文属性,选择“硬件标识符”,可以看到该报文标识符为“280”,下面需要用到此标识符
8、在程序段里,插入FB284-“SINA_POS”伺服控制指令,该指令可以从右侧全局库里的“Drive_Lib_S7_1200_1500”,“主模板”,“03_SINAMCS”中找到
9、为了将该FB284指令块与上面的伺服设备匹配,将HWIDSTW,HWIDZSW设为报文标识符280。
西门子S11火灾报警系统
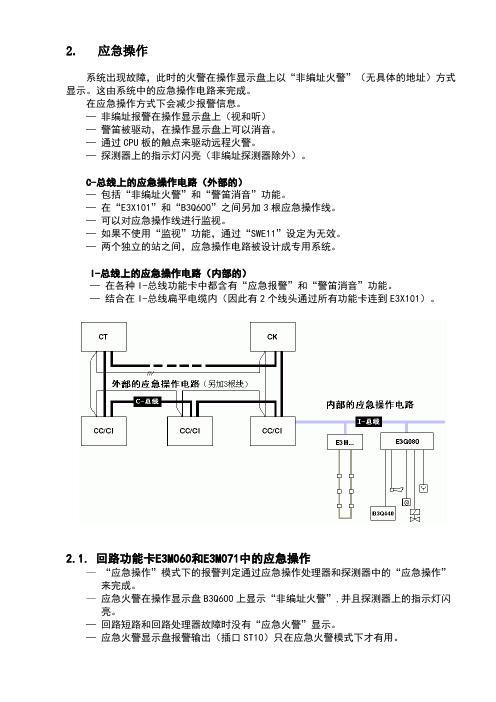
2. 应急操作系统出现故障,此时的火警在操作显示盘上以“非编址火警”(无具体的地址)方式显示。
这由系统中的应急操作电路来完成。
在应急操作方式下会减少报警信息。
—非编址报警在操作显示盘上(视和听)—警笛被驱动,在操作显示盘上可以消音。
—通过CPU板的触点来驱动远程火警。
—探测器上的指示灯闪亮(非编址探测器除外)。
C-总线上的应急操作电路(外部的)—包括“非编址火警”和“警笛消音”功能。
—在“E3X101”和“B3Q600”之间另加3根应急操作线。
—可以对应急操作线进行监视。
—如果不使用“监视”功能,通过“SWE11”设定为无效。
—两个独立的站之间,应急操作电路被设计成专用系统。
I-总线上的应急操作电路(内部的)—在各种I-总线功能卡中都含有“应急报警”和“警笛消音”功能。
—结合在I-总线扁平电缆内(因此有2个线头通过所有功能卡连到E3X101)。
2.1. 回路功能卡E3M060和E3M071中的应急操作—“应急操作”模式下的报警判定通过应急操作处理器和探测器中的“应急操作”来完成。
—应急火警在操作显示盘B3Q600上显示“非编址火警”,并且探测器上的指示灯闪亮。
—回路短路和回路处理器故障时没有“应急火警”显示。
—应急火警显示盘报警输出(插口ST10)只在应急火警模式下才有用。
2.2. 回路功能卡E3M080中的应急操作—应急操作的报警判定通过硬件比较器来完成。
—应急火警在操作显示盘B3Q600上显示“非编址火警”,探测器上的指示灯不亮。
—可选功能“短路报警”也是通过应急报警来实现。
—相应的应急火警显示盘报警输出(插口ST10)只在应急火警模式下才有用。
2.3. 回路功能卡E3M111中的应急操作—“应急操作”模式下的报警判定通过应急操作处理器来完成。
—应急火警在操作显示盘B3Q600上显示“非编址火警”,且探测器上的指示灯闪亮。
—回路短路和回路处理器故障时没有“应急火警”显示。
2.4. 灭火功能卡E3G080中的应急操作a) 控制器出现故障(E3X101或B3Q600)灭火功能卡E3G080的功能是独立的。
基于S120伺服驱动模块111报文的西门子S7-300程序模块设计

基于S120伺服驱动模块111报文的西门子S7-300程序模
块设计
高挺;朱晓民;张希;程金
【期刊名称】《制造业自动化》
【年(卷),期】2016(038)010
【摘要】针对自动化系统中集成S120伺服驱动模块时遇到的控制及通讯难题,设计了基于111报文的S7-300通讯控制程序模块Servo120。
使得从事自动化工作的工程师可以通过该模块简单、快捷的实现S7控制系统与S120伺服驱动模块的通讯,并通过报文方式实现S7-300PLC对S120伺服驱动模块的速度与位置控制。
模块对报文中的控制及状态字进行详细解析,大大提高了调试诊断效率。
并设置了多点联动,速度转换等模式,极大的方便了现场应用,提高了系统集成过程的效率并降低了操作难度。
【总页数】3页(P67-69)
【作者】高挺;朱晓民;张希;程金
【作者单位】北京机械工业自动化研究所,北京100120;北京机械工业自动化研究所,北京100120;北京机械工业自动化研究所,北京100120;北京机械工业自动化研究所,北京100120
【正文语种】中文
【中图分类】TP23
【相关文献】
1.西门子SimoDrive伺服驱动模块的维修 [J], 王安军;吴俊宁;刘伟
2.西门子S7-300 PLC与S120变频器在钢带收卷机中的应用 [J], 郝丽娜;张茂青;丁国强;李备
3.西门子推出Sinamics S120高性能单轴驱动模块 [J],
4.西门子S7-300 PLC与S120变频器在钢带收卷机中的应用 [J], 郝丽娜;张茂青;丁国强;李备
5.基于西门子S120伺服控制的分拣拨烟系统设计 [J], 王勇
因版权原因,仅展示原文概要,查看原文内容请购买。
S1111111111111111111111111111111114

S7用一台S7-300的PLC(CPU315-2PNDP)用一根DP线如何控制六台MM440变频器,地址如何定义?上位机操作用wincc?最佳答案1.西门子PLC与MM440变频器通信,变频器需要安装DP通讯板,订货号:6SE400-1PB00-0AA0。
变频器地址可以采用二种方式来设定总线地址,一是通过DP通讯板上DIP 拨码开关来设置(范围1-126),二是通过P0918来设置。
需要注意的是,当DIP拨码开关不为0时,DIP拨码开关设定值优先(P0918也显示DIP拨码开关的地址)。
当DIP拨码开关为0时,P0918设置的CB地址有效。
2.在西门子视频学习中心,里面就有关于“MM440与S7-300进行PROFIBUSDP进行通讯”的视频讲解,图文并茂非常好,按照实例操作一下,基本就掌握啦。
链接:/service/elearning/cn/Course.aspx ?CourseID=9033.也可参考我以前回答过的类似的问题《PLC与变频器通讯的DB数据块》里面结合《MM440使用大全》对报文做了一些介绍链接:/service/answer/solution.aspx?Q_ ID=112349&cid=10294.还有一些资料:MM440使用大全/download/Upload/SD/manual/1 28.PDFS7-300与MM440间DP通讯/view/906806e6aeaad1f346933fc6.html MM440与S7-300通过DP通讯实现读取和修改参数例程/download/docMessage.aspx?ID= 3172&loginID=&srno=&sendtime=驱动通信基础/download/docMessage.aspx?ID= 1261&loginID=&srno=。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Drive01_STW1_BIT11BOOL FALSE Drive01_STW1_BIT12BOOL FALSE Drive01_STW1_BIT13BOOL FALSE Drive01_STW1_BIT14BOOL FALSE Drive01_STW1_BIT15BOOL FALSE Drive01_STW1_BIT0BOOL FALSE Drive01_STW1_BIT1BOOL TRUE Drive01_STW1_BIT2BOOL TRUE Drive01_STW1_BIT3BOOL TRUE Drive01_STW1_BIT4BOOL TRUE Drive01_STW1_BIT5BOOL TRUE Drive01_STW1_BIT6BOOL FALSE Drive01_STW1_BIT7BOOL FALSE Drive01_POS_STW1_BIT8BOOL FALSE Drive01_POS_STW1_BIT9BOOL FALSE Drive01_POS_STW1_BIT10BOOL FALSE Drive01_POS_STW1_BIT11BOOL FALSE Drive01_POS_STW1_BIT12BOOL FALSE Drive01_POS_STW1_BIT13BOOL FALSE Drive01_POS_STW1_BIT14BOOL FALSE Drive01_POS_STW1_BIT15BOOL FALSE Drive01_POS_STW1_BIT0BOOL FALSE Drive01_POS_STW1_BIT1BOOL FALSE Drive01_POS_STW1_BIT2BOOL FALSE Drive01_POS_STW1_BIT3BOOL FALSE Drive01_POS_STW1_BIT4BOOL FALSE Drive01_POS_STW1_BIT5BOOL FALSE Drive01_POS_STW1_BIT6BOOL FALSE Drive01_POS_STW1_BIT7BOOL FALSE Drive01_POS_STW2_BIT8BOOL FALSE Drive01_POS_STW2_BIT9BOOL FALSE Drive01_POS_STW2_BIT10BOOL FALSE Drive01_POS_STW2_BIT11BOOL FALSE Drive01_POS_STW2_BIT12BOOL FALSE Drive01_POS_STW2_BIT13BOOL FALSE Drive01_POS_STW2_BIT14BOOL FALSE Drive01_POS_STW2_BIT15BOOL FALSE Drive01_POS_STW2_BIT0BOOL FALSE Drive01_POS_STW2_BIT1BOOL FALSE Drive01_POS_STW2_BIT2BOOL FALSE Drive01_POS_STW2_BIT3BOOL FALSE Drive01_POS_STW2_BIT4BOOL FALSE Drive01_POS_STW2_BIT5BOOL FALSE Drive01_POS_STW2_BIT6BOOL FALSE Drive01_POS_STW2_BIT7BOOL FALSE Drive01_STW2_BIT8BOOL FALSE Drive01_STW2_BIT9BOOL FALSE Drive01_STW2_BIT10BOOL FALSE Drive01_STW2_BIT11BOOL FALSE Drive01_STW2_BIT12BOOL FALSE Drive01_STW2_BIT13BOOL FALSEDrive01_STW2_BIT1BOOL FALSE Drive01_STW2_BIT2BOOL FALSE Drive01_STW2_BIT3BOOL FALSE Drive01_STW2_BIT4BOOL FALSE Drive01_STW2_BIT5BOOL FALSE Drive01_STW2_BIT6BOOL FALSE Drive01_STW2_BIT7BOOL FALSE Drive01_OVERRIDE WORD W#16#100 Drive01_MDI_TARPOS DWORD DW#16#0 Drive01_MDI_VELOCITY DWORD DW#16#0 Drive01_MDI_ACC WORD W#16#0 Drive01_MDI_DEC WORD W#16#0 Drive01_FREE_W WORD W#16#0 Drive01_ZSW1WORD W#16#0 Drive01_POS_ZSW1WORD W#16#0 Drive01_POS_ZSW2WORD W#16#0 Drive01_ZSW2WORD W#16#0 MELDW WORD W#16#0 Drive01_XIST_A DWORD DW#16#0 Drive01_XIST_B DWORD DW#16#0 Drive01_FAULT_CODE WORD W#16#0 Drive01_WARN_CODE WORD W#16#0 Drive01_FREE_R WORD W#16#0//JOG1 点动命令 p2589=r2090.8//JOG2 点动命令 p2590=r2090.9control via plc; p0854=r2090.10;//启动回零 p2595=r2090.11reserved ;/ external block change P2632=1;P2633=r2090.13//p2613=r2090.14//p2614=r2090.15//启动变频器;p0840=r2090.0OFF2;P0844=r2090.1OFF3; P0848=r2090.2enable operation; p0852=r2090.3//P2641=r2090.4: 0: 停止当前任务,以最大减速度 p2573 停机//P2640=r2090.5: 0: 停止命令,以 P2645 的减速度停车//P2650=r2090.6: 数据输入开关,上升沿进行单步数据传输//激活 traversing block, P acknowledge fault; p2103=r2090.7//p2648=r2091.8: 1: 绝对位置模式;0:相对位置模式//P2651=r2091.9: 速度模式正向运行//P2652=r2091.10: 速度模式反向运行reserved//p2649=r2091.12: 1: 连续数据传输; 0:单步运行reserved//MDI 模式选择, P2653=r2091.14 0:位置模式 1:速度模式//激活MDI, P2647=r2091.15//选择程序步 bit0: p2625=r2091.0//选择程序步 bit1: p2626=r2091.1//选择程序步 bit2: p2626=r2091.2//选择程序步 bit3: p2626=r2091.3//选择程序步 bit4: p2626=r2091.4//选择程序步 bit5: p2626=r2091.5reservedreserved//回零方式(0:Active homing;1: passive homing); p2597=r2092.8//回零启动时的方向(0:从正向开始回零;1:从反向开始回零);p2604=r2092.9//external block change p2632=0; p2510=r2092.10//external block change p2632=0; p2511=r2092.11reservedreserved//p2582=r2092.14 软限位开关激活//p2568=r2092.15 stop cam 激活//p2655[0]=r2092.0 激活 tracking mode//将当前位置直接设置成零点 p2596=r2092.1//CAM 信号 p2612=r2092.2reservedreserved//点动模式 p2591=r2092.5reservedreservedreservedreservedreserved//电机切换的反馈信号,p0828=r2093.11//p2045=r2050[3];profidrive 时钟同步信号//p2045=r2050[3];profidrive 时钟同步信号//p2045=r2050[3];profidrive 时钟同步信号//p2045=r2050[3];profidrive 时钟同步信号//驱动数据组切换 p0820[0]=r2093.0//驱动数据组切换 p0821[0]=r2093.1//驱动数据组切换 p0822[0]=r2093.2//驱动数据组切换 p0823[0]=r2093.3//驱动数据组切换 p0824[0]=r2093.4reservedreserved//parking axis; p0897=r2093.7Drive01_OVERRIDE 对应 r2050[4];p2646=r2050[4]; 需要设置一个值,//p2642=r2060[5] MDI 位置给定(单位:LU);//p2643=r2060[7] MDI 速度给定(单位:1000LU/min)//2644=r2050[9] MDI 加速度(4000h 对应100%)//2645=r2050[10] MDI 减速度(4000h 对应100%)//自由连接的过程数据字p2051[0]=r2089[0]=p2080[0...15]p2051[1]=r2089[3]=p2083[0...15]p2051[2]=r2089[4]=p2084[0...15]p2051[3]=r2089[1]=p2081[0...15]p2051[4]=r2089[2]=p2082[0...15]p2061[5]=r2521 位置实际值p2061[7]=r0063[0] 转速实际值p2051[9]=r2131p2051[10]r2132自由连接。