S120控制单元cu320 调试纪录
S120选型表CU320-2DP-V2
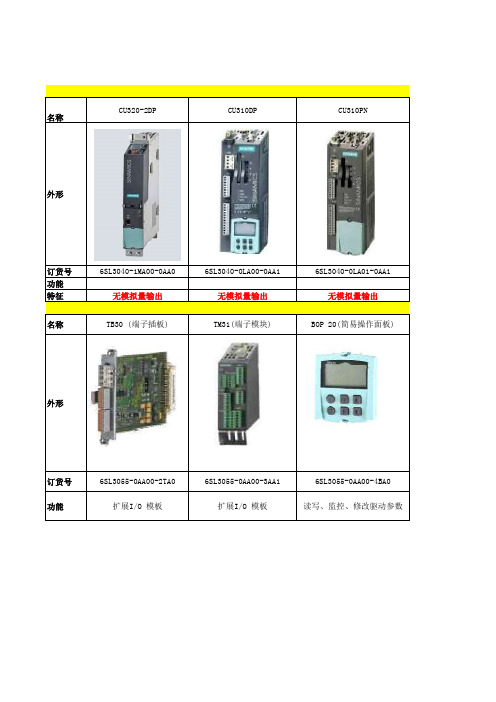
CU320-2DP CU310DP CU310PN名称外形订货号6SL3040-1MA00-0AA06SL3040-0LA00-0AA16SL3040-0LA01-0AA1功能特征无模拟量输出无模拟量输出无模拟量输出名称TB30 (端子插板)TM31(端子模块)BOP 20(简易操作面板)外形订货号6SL3055-0AA00-2TA06SL3055-0AA00-3AA16SL3055-0AA00-4BA0功能扩展I/O 模板扩展I/O 模板读写、监控、修改驱动参数特征(1) 直接插入Simotion D 或CU320 插槽中。
(2) 4 路数字量输入。
4 路数字量输出。
2 路模拟量输入。
2 路模拟量输出。
(1) 通过Drive-CLiQ 连接。
(2) 8 路数字量输入。
4 路双向 数字量输入/输出。
2 路数字量输出(继电器)。
2 路模拟量输入,2 路模拟量输出。
1 路温度传感器输入 PTC 或KTY。
2个 Drive-CLiQ 接口。
(1) 直接插到CU310DP 、CU310PN 或CU320 上。
(2) 能读写或监控参数相关参数。
CUA31CF 卡(CU320-2DP)(不带性能扩展)CF 卡(CU320-2DP)(带性能扩展)6SL3040-0PA00-0AA16SL3054-0ED00-1BA06SL3054-0ED01-1BA0AOP30高级操作面板SMC30(编码器转换模块)CBE20(CU320 ProfiNet 通讯板)6SL3055-0AA00-4CA36SL3055-0AA00-5CA26SL3055-0AA00-2EB0将TTL 或HTL 信号转换为Drive-CLiQ 信号CU320 Profinet 通讯接口板(1).通过Drive-CLiQ 连接。
(2).用于下列编码器HTL 双极信号)。
(3).15 针编码器接口,含有温度传感器信号。
(4)端子X521/X531 编码器接口信号(5).1 个DC 24V 电源连接器。
S120调试个人记录[整理]
![S120调试个人记录[整理]](https://img.taocdn.com/s3/m/3df87411e97101f69e3143323968011ca300f785.png)
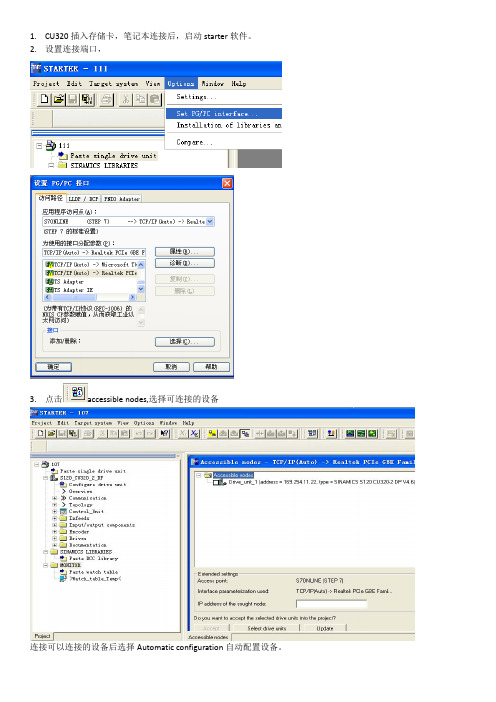
S120调试个人记录首先安装STA TR软件,(软件要在S7-5.5基础上安装)安装TOOLBO X,在plc硬件组态完成后,进入START软件1 清零:-----先在线--------再清零2 搜寻节点:--- 169.254.11.22选择S70NLINE或device根据情况而定。
PG/PC选择当前笔记本的网卡形式IP设置完成以后点击3 连接目标驱动:Project/connect to selected target device若出现这个警告说明没连接上,解决方法是点击选择Device方式尝试一下。
检查网线,检查IP设置。
(注:改变连接方式时要保证跟commiss interfac e 的一致)4 查看是否连接到伺服:点击5 把项目上传到PC,:点击Automatic configation create6 伺服轴配置:点击伺服轴部分,连续Next是否带包扎设置设置成1或设置成外部接线(目的是通知CU320Next选择110报文,然后点击完成各个伺服轴都按照以上6的步骤设置7 设置报文选择自由报文修改完成后点击进入控制字,状态字设置画面,根据PLC UDT999的定义设置就好。
问题1:当硬件地址设定与报文设定一致,但报文出现问号时,点击报文画面右下角的set up address ,但必须是硬件组态处于关闭状态,要不不能点击。
8 绝对值原点的设置:进入Basic positioner ,→homing9 加速度的设定:参数设置1120在跑MDI 方式时需要设定2644,2645这两个参数10 正反转设定:一旦电机方向反了,改正1821,变成0或1.改前先改p10改成3,然后再改过来。
控制字的个数。
(可以再硬件组态中改)想改就不能是对号的,要在叹号下才能改。
11 螺距改动:在Mechanics 中改12 限位的设置:硬极限的设定也可以改变开闭点。
S120调试说明有截图
3. 点击 accessible nodes,选择可连接的设备
连接可以连接的设备后选择 Automatic configuration 自动配置设备。
Default setting for all components:选择 vector;并创建
Байду номын сангаас
4. DI: DI0 启动停止信号; DI1 手自动切换;DI2 故障复位。
5.DO:DO0 变频器运行信号;DO1 变频器故障信号;
整流单元:双击整流单元部分
在向导中进行快速调试
逆变电源
10
配置完成后,会上传给 PG
对 TM31 的配置:
1. AI:手操器 4~20mA 频率给定。
2.AO:1 通道为频率反馈信号。频率表量程为 60Hz,将 20mA 对应 120%。2 通道为电流反馈信号。将电流表量程设 置到 Vector 中 Expert list:P2002
S120调试手册

前提:电脑上应安装STEP7及STARTER软件;
Step1.在STEP7中打开工位的PLC程序,双击CU320模块:
Step2.双击Comissioning,会自动启动STARTER软件:
Step3.点击连线,将当前更换为在线模式:
Step4.当发现控制器与PC配置不一致时,需要点击上传到控制器按钮,使其一致:
连接的7、8号端子,作为参考电位,只有在连接参考电位的情况下,数字输入才可以工作。
X132数字量输入/输出
项目中,出于这个输入输出,并没有使用有意义的输入或输出信号,只是连接了7、8号电子电位,留作备用。
X124电源
此端子为CU320的电源端子,连接DC24V电源及参考电位。
X150P1/P2PROFINET接口
Step9.LOADTOPG.
接入24V电源。
LED含义
电机模块
电机模块是为已连接的电机提供能源的功率部件(反用换流器)。供电是通过驱动设备的
直流母线来进行的。电机模块必须通过DRIVE-CLiQ与控制单元连接在一起,后者中存
储有用于电机模块的控制和调节功能。
单电机模块上正好可以运行一台电机,而在双电机模块上能够连接并运行两台电机。
电源模块类型
ALM:ActiveLineModule调节型电源模块
BLM:BasicLineModule基本型电源模块
SLM:SmartLineModule非调节型电源模块
我们项目中使用SLM型电源模块,功率为5KW。
进线电抗器
进线电抗器可以将进线侧噪声控制在安全值内册
1.硬件
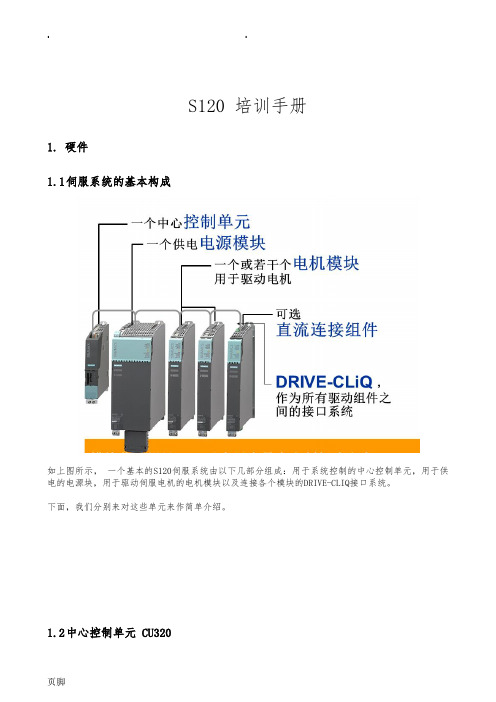
伺服系统的基本构成
如上图所示,一个基本的S120伺服系统由以下几部分组成:用于系统控制的中心控制单元,用于供电的电源块,用于驱动伺服电机的电机模块以及连接各个模块的DRIVE-CLIQ接口系统。
S120操作说明
S120操作说明1、面板(BOP)操作:1)、传动对象的选择:面板显示屏左上角显示的数字是被激活的传动对象,对应控制单元CU320及其控制下的功率模块。
同时按“FN”和“向上”键,可以该数字闪烁,通过上下键的选择,即可显示选择的传动对象。
其中,对于1#控制单元CU320:(+G01)01代表1#控制单元CU320;05代表1#整流回馈单元;对于2#控制单元D435:(+G01)01代表2#控制单元D435;02代表开卷机控制系统;03代表1#卷取机控制系统(主);04代表2#卷取机控制系统(从);对于3#控制单元CU320:(+G01)01代表3#控制单元CU320;02代表矫直机控制系统;03代表1#平整机控制系统(从);04代表2#平整机控制系统(主);05代表2#整流回馈单元;对于控制单元CU310:(+G13)01代表控制单元CU310;02代表变频器;选择操作对象,即可对相应对象进行操作,以及查看状态等。
2)、参数的更改:在选择好传动对象后,可以进入想要查找的参数。
改变参数值,须先按动“FN”键,相应的参数位闪烁后方可通过上下键更改,按“P”键确认。
如果不能找到想要查看的参数,须回到传动对象为控制单元(即传动对象显示01),将参数P0003=3,可显示完全参数列表。
参数改动后,显示屏中“S”出现,说明参数存储区“RAM”和“ROM”不一致,此时须常按“P”键三秒钟,将参数写入ROM。
3)、故障复位:控制单元报故障,面板右上方红色故障灯点亮,需按“FN”键进行复位;D435控制单元的故障,可由控制柜(+G01)柜门按钮进线复位。
天津天传电气有限公司2012年3月20日。
S120 调试指导
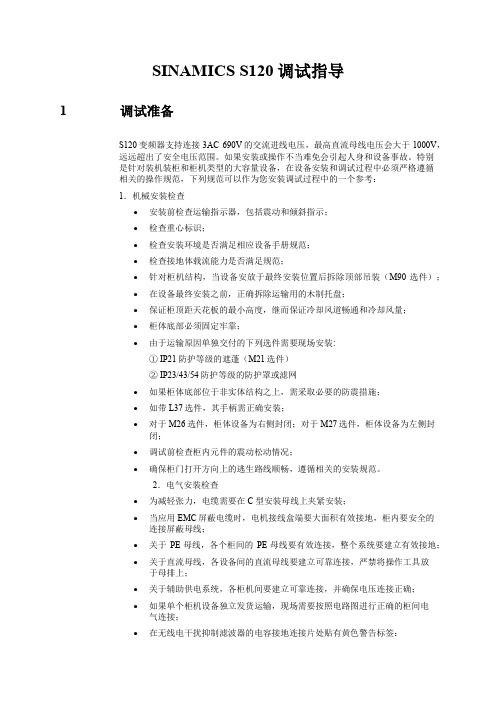
6. 整流装置的相关参数设置,设置完成后点击 Next。
1
1
2
3
3
图 2-7 基本整流装置参数设置(装机装柜型左侧/书本型右侧)
⑴ 设置实际的进线连接电压; ⑵ 选择整流装置是否并联(仅支持装机装柜型模块)及设置并联装置数量; ⑶ 外部制动单元设置,激活后制动单元受整流装置监控。
2
调试流程
S120 的简单调试流程如下图所示:
图 2-1 简单调试流程
说明 S1: 针对共母线结构的多传动设备,整流装置的预充电能力限定了整个共母线 系统的总电容量,在选型样本中可以查到整流装置自身的电容量和允许的最大 电容量以及其它共母线模块的电容量;
S2: 在进行配置之前,我们需要知道驱动器,CU 类型,CF 卡固件版本,电机和 编码器数据。
电缆需按要求的力矩固定在端子上,电机电缆不能超出允许的最大长度, 该长度因电缆类型(是否屏蔽)而异;
制动单元到制动电阻的连接电缆不能超出允许的最大长度,制动电阻的热 触点信号需要连接到 CU 或控制器上;
对于装机装柜设备,当并联应用驱动单绕组电机时,确保电机电缆不小于最 小长度或配备输出电抗器;
S3: S120 支持用基本操作面板 BOP20,高级操作面板 AOP30 及调试软件 STARTER(推荐使用)三种工具进行调试。
面板调试:先进行工厂复位,然后进行快速调试,保存数据;
软件调试:首次在线后先进行工厂复位,可以在线自动配置或离线手 动配置,配置完成后下载并保存数据;
S4: 上电前检查
说明 20kw 和 40kw 的 BLM 内部集成有制动单元。
7. 选择通信报文类型,此处也可以不做设置而之后在“Communication”中进行通信 配置,单击 Next。
博途软件怎么调试S120

博途软件怎么调试S120
基于博途V15的S120调试
从博途V15开始,Startdrive软件可⽤于配置和调试S120 产品(CU320-2PN )。
可以使⽤Startdrive执⾏以下任务,例如:可以把驱动器、PLC和HMI 创建在统⼀的项⽬中。
通过⾃动配置或者⼿动选择所使⽤的功率单元,电机和编码器来组态驱动器。
通过指定命令源,设定值源,为驱动器分配参数和控制类型。
使⽤向导界⾯来扩展参数分配功能块和技术控制器。
通过控制⾯板测试电机和观察状态。
发⽣错误时执⾏诊断,集成TRACE录波功能。
Startdrive的操作极其简便:
1)在⽹络视图添加S120:
2)在添加的控制单元上点击右键,选择“设备配置检测”:
3)⾃动识别DRIVE-CLiQ上的所有设备,可以创建伺服或者⽮量控制对象:
4)选择没有⾃动识别的电机(没有DRIVE-CLiQ接⼝):
5)配置通信报⽂:
6)优化并且测试电机,完成配置:
技成培训⽹整理发布
如果对您有帮助,请下载惠存。
S120变频器的调试方法及故障处理(工程师培训)

S120变频器的调试方法及故障处理(工程师培训)结合STARTER软件进行S120的参数设置(调试过程和调试步骤)(一) 变频器的安装就位 (1)(二) 变频器的上电检查工作 (1)(三)变频器的上电 (2)(四)变频器的调试 (2)(一) 变频器的安装就位1、变频器柜体出厂前测试好,所有的说明书合格证以及需要到现场安装的设备或备件都装好,并出具详细的装箱清单。
2、运输过程中,注意防雨,防碰,防倾倒3、运到现场,先查验装箱清单,验货。
从车上把柜体运输到配电室注意防雨,防碰,防震动。
4、变频器就位,穿母排,注意把变频器上部用塑料布或其他封住,防止掉落进铜丝、电线、螺栓、垫片等(因为上部一般都用来散热,敞口)(二) 变频器的上电检查工作第1步:我们先看变频器有没有损坏或碰坏的痕迹,看电气元器件型号和设计原理图上是否一致,确保要一样。
要么是供货不对,要么是原理图不对。
总之“确保实物和设计原理图型号一致”。
第2步:把变频器柜内的干燥剂、塑料(减震防碰的材料)通通拿走;第3步:检查变频器的主回路连接包括变频器的进线,变频器的出线,制动单元,制动电阻,电机的接线。
做到:使用万用表欧姆档验证接线正确;使用螺丝刀验证接线端子紧固;确保变频器进线“相与相无短路”、“相与地无接地”情况发生。
“制动单元的进线极性正确”、“制动单元的出线没有接地,并且阻值和制动电阻一样。
使用万用表测量电机三相绕组无断路,正常值U2-V2、V2-W2、U2-W2在零点几欧姆。
第4步: 检查变频器的控制回路,做到接线紧固,正确,确保没有短路,接地发生。
第5步:检查电机接线,测量电机绝缘,保证电机能够转动。
确保无接地、断路、短路情况发生。
第6步:检查变频器的接地情况,电机的接地情况。
第7步:考虑到电机要做优化,提前通知甲方脱开负载,并现场亲自确认。
以上工作都要做到位,并填写上电前的工作内容和测量表。
(三)变频器的上电1 先测量变频器的进线断路器的进线电压相序正确,三相电压值正确(符合变频器的输入范围),三相电压平衡。
SINAMICS S120调试手册

Sinamics S120 调试指南 2006,11 版
-1-
西门子(中国)有限公司
自动化与驱动集团
运动控制部
Sinamics S120 系列丛书
Sinamics S120 调试指南
4.2.1 DP 地址设定 ....................................................................................................................26 4.2.2 DP 报文设置 ....................................................................................................................27 五、通过 Slave to Slave 方式实现各从站之间通讯...............................................................38 5.1 在 Step 7 中项目组态.......................................................................................................39 5.2 从站参数配置...................................................................................................................39 5.3 激活 Slave to Slave 功能..................................................................................................41 5.4 在 Step 7 中使用 SFC14,15 读写 7# 站数据...................................................................41
西门子S120调试

S120调试连接CU320-2DP的LAN口100与整流器400口连接,101与逆变器400口连接,102与编码器500口连接,插入CF卡后送电,等待CF卡及整流器、逆变器RDY指示灯闪烁后变常绿(扫描版本信息)即可开始调试。
硬件升级后要重上电调试CU320-2DP IP=169.254.11.22 DPH=0 DPL=0 p918=6(DP地址)打开STARTER软件1、新建一个项目并输入名字2、点击扫描节点在线扫描扫描到节点后勾选节点,点接受左侧菜单树出现装置DRIVE后关闭扫描窗口3、在线读取装置点connect to selected starget devices读出,LOAD TO PG 。
左侧装置前变绿后关闭4、选中左侧装置Drive unit变灰后点Restere factory settings 恢复工厂设定后点OK5、点左侧Automatic configuration 自动配置组态→First configuration→configuration start→选择Vector 矢量→create创造创建完成后点击离线GO OFFLINE离线修改参数6、配置控制单元1、选去控制单元CONTROL UNIT变灰,出现控制单元装置配置窗口,点WIZARD进行配置选择插件NO OPTION MODULE >NEXT>选择报文999自由报文NEXT>FINISH完成2、定义CU320输入输出端子及屏蔽报警信息选取IN/OUTPUTS定义启动整流器端子X132-1/DI4定义逆变器报警端子X122-9/DO8选取R2139 BIT3 FAULT 定义整流器报警端子X132-9/DO8选取R2139 BIT3 FAULT屏蔽通讯中断报警信息选取EXPERT LIST将P2118.0=1910 P2119.0=37、选取整流单元INFEED/S INF02变灰,出现控装置配置窗口,点WIZARD进行配置选择型号选择电压选择报文NEXT>FINISH完成屏蔽通讯中断报警信息选取EXPERT LIST将P2118.0=1910 P2119.0=38、选取逆变单元DRIVES/VECTOR 03变灰,出现控装置配置窗口,点CONGIGURE DDS进行配置1、选择有编码器矢量控制模式21 无编码器矢量20 V/F模式02、选择逆变器型号4、选择无滤波器选择无滤波器5、选择高负载矢量驱动6、选择电机类型为感应电动机7、输入电机铭牌数据,冷却方式为强制风冷(可用默认)8、默认计算数据9、电机不带抱闸10、选编码器无编码器有编码器点der配置编码器OK后变成自定义11、标准矢量控制及电机识别先不做以防报警后作12、逆变器报文13、修改加减速时间和最高速度NEXT>FINISH完成屏蔽通讯中断报警信息选取EXPERT LIST将P2118.0=1910 P2119.0=39、报文排序选取MESSAGE FRAM CONFIGUATION用下箭头将CONTROL/S INT报文下移到WITHOUT PZDS下P1200=1 转速跟踪P1110=1 禁止反转显示基准频率P2000=1000(6级电机)750(8级电机点击励磁时间P346=3 电机大时减至1 提高从0速启动时间10、以上配置完成后编译保存11、在线连接点击在线后进行下装load project totarget system 点击Yes12、在线下装完成保存至CF卡13、电机优化1、进入Drives目录下commissioning目录下stationary/turning,2、选择stationary→Activate对电机进行静态优化。
S120变频器操作说明
S120变频器操作说明(总2页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除S120操作说明1、面板(BOP)操作:1)、传动对象的选择:面板显示屏左上角显示的数字是被激活的传动对象,对应控制单元CU320及其控制下的功率模块。
同时按“FN”和“向上”键,可以该数字闪烁,通过上下键的选择,即可显示选择的传动对象。
其中,对于1#控制单元(+Z2DKG02柜):01代表1#控制单元CU320;02代表整流单元;03代表1#步进冷床前回转臂拨料机控制系统;04代表2#步进冷床前回转臂拨料机控制系统。
对于1#控制单元(+Z2DKG04柜):01代表2#控制单元CU320;02代表4#链式冷床控制系统;03代表1#链式冷床控制系统;04代表1#步进冷床控制系统;05代表2#步进冷床控制系统。
选择操作对象,即可对相应对象进行操作,以及查看状态等。
注意:传动对象在显示参数值时不可更改,即显示“P”或“r”时方可更改。
2)、参数的更改:在选择好传动对象后,可以进入想要查找的参数。
改变参数值,须先按动“FN”键,相应的参数位闪烁后方可通过上下键更改,按“P”键确认。
如果不能找到想要查看的参数,须回到传动对象为控制单元(即传动对象显示01),将参数P0003=3,可显示完全参数列表。
参数改动后,显示屏中“S”出现,说明参数存储区“RAM”和“ROM”不一致,此时须常按“P”键三秒钟,将参数写入ROM。
3)、故障复位:控制单元报故障,面板上方红色故障灯点亮,需按“FN”键进行复位。
2、常用参数:r21 输出频率r27 输出电流r31 电机输出转矩r61 编码器实际值r26 直流母线电压r2090 由自动化发送的控制字1(位显示)r2050.1 由自动化发送的控制字2(速度给定)r2089.0 发送给自动化的状态字1(位显示)r2089.1 发送给自动化的状态字2(位显示)P1520 转矩上限幅P1521 转矩下限幅(该值对应参数r333,电机额定转矩)P1120 加速时间P1121 减速时间。
S120调试手册范本
S120 培训手册1. 硬件1.1伺服系统的基本构成如上图所示,一个基本的S120伺服系统由以下几部分组成:用于系统控制的中心控制单元,用于供电的电源块,用于驱动伺服电机的电机模块以及连接各个模块的DRIVE-CLIQ接口系统。
下面,我们分别来对这些单元来作简单介绍。
1.2中心控制单元 CU320控制单元 CU320-2 PN 是一个中央控制模块,可实现对单个或多个电源模块和/或电机模块的开环和闭环控制功能。
接口说明•X100 - X103 DRIVE-CLiQ 接口DRIVE-CLIQ接口用于S120系统部模块的连接,在我们的项目中,使用西门子DRIVE-CLIQ电缆将CU320上的X100口与电机模块上的X200口相连接。
•X122 数字量输入/输出接口在本项目中,只使用了X122的第1个输入端子,作为伺服电机的急停使用。
连接的7、8号端子,作为参考电位,只有在连接参考电位的情况下,数字输入才可以工作。
•X132 数字量输入/输出项目中,出于这个输入输出,并没有使用有意义的输入或输出信号,只是连接了7、8号电子电位,留作备用。
•X124 电源此端子为CU320的电源端子,连接DC 24V电源及参考电位。
•X150 P1 / P2 PROFINET接口PROFINET接口用于与PLC进行数据传输,此处我们使用X150 P1连接至我们的交换机上。
另外,两个 PROFINET 接口各有一个绿色和一个黄色的 LED 用于诊断。
LED 可显示下列状态信息:•存储卡注意1:在运行期间插拔存储卡会导致设备停止的危险。
如果在运行期间插拔存储卡,可导致数据丢失并有可能引起设备停止。
•仅在控制单元断电状态下才可插拔存储卡。
•只允许按照上图所示插入存储卡(箭头在上方朝右指)注意2:连同存储卡一起寄出控制单元会导致数据丢失危险在寄回损坏的控制单元时,存储卡上已有的数据信息(参数、固件、授权等)在维修和测试期间有可能丢失。
S120调试辅助资料
是的,TTL编码器不能用做同步电机磁极位置的检测。
S120可以自识别电机的磁极位置,而零脉冲可以作为位置校准信号。
对于HTL/TTL 编码器,在每次上电后第一次运行时需要识别一次磁极位置(P1982使能此功能)。
针对不同的电机可能需要尝试不同的磁极识别方法(P1980),及修改识别的相关参数。
之后可正常运行。
如果编码器带0脉冲可以使能精同步功能,也就是每次电机经过0脉冲时变频器对转子的位置进行校正。
之前需要用P1990对0脉冲进行校准。
从使用MM440就与那个自识别的参数P1910=3打交道,今天PASS 了,明天却OVER。
然后想想办法,又PASS。
每当PASS以后,总是很惬意。
但是,总是阶段性的PASS或者OVER。
这不,最近这大热的天,又自识别不了,总是报故障F0041=4,向西门子的技术服务热线寻求帮助,也还是不行。
死活就是P1910=3过不去。
真郁闷。
我需要P1910=3通过,因为我需要的最高工作频率在100-150Hz!要弱磁升速的。
先将系统设置成P1300=0(线性V/F控制),做快速调试,P1910=1。
然后将转速从0.8倍的额定转速开始,直至最高转速,并分别记录四点的电流值和磁通值,然后,再将系统改成P1300=20(SLVC控制),做快速调试,P1910=1。
然后,将那纪录的4点数据填写到相应的磁化曲线参数中去(注意访问级是4)。
最后做P1960=1。
结束手动识别的调试。
“开车”空载试运行,欢呼雀跃。
弱磁以后的运行噪声、振动都很满意。
忽然觉得手动识别磁化曲线更好。
因为它是通过实验的办法确定的额定激磁电流,由实际测出的弱磁电流与电机磁通的关系。
应该说更实际一些,对被控电机建模而言更相符。
玩MM440真的很过瘾耶。
从此以后我再也不会关心P1910=3的结果了。
不论什么结果,我都可以让磁化曲线的识别结果PASS。
使用P1910进行电机识别——注意:测量必须在冷机状态下进行。
还需确保在P0625中已正确输入实际环境温度(工厂设定为20°C),输入环境温度必须在完成快速调试(P3900)之后,执行电机识别之前进行。
SINAMICS S120 调试手册
SINAMICS S120 调试手册目录SINAMICS S120 调试手册 (1)第一章 S120产品介绍 (4)第二章项目组态与调试 (10)2.1调试软件介绍 (10)2.2S120硬件组态 (10)2.3S TARTER项目列表 (18)第三章电机优化 (33)3.1S120驱动感应电机的优化 (33)3.2S120驱动第三方伺服电机时的优化 (36)第四章 S120的基本定位 (37)4.1激活基本定位功能 (38)4.2基本定位_点动(JOG) (40)4.3基本定位_回零(H OMING /R EFERENCE) (41)4.4基本定位_限位(L IMIT) (46)4.5基本定位_程序步(T RAVERSING B LOCKS) (47)4.6手动数据输入(MDI) (48)第五章通讯 (51)5.1S120与PG/PC的串口 (51)5.2S120与TP170 (52)5.3S120、TP170B与S7200的联接 (56)5.4通过DP总线实现S7-300与SINAMICS S120通讯 (61)5.5用DP总线对电机起、停及速度控制 (76)5.6驱动器参数的读取及写入 (78)5.7S120的“从对从”方式(S LAVE - TO -S LAVE) (86)5.7.1通过Slave to Slave 方式实现各从站之间通讯 (86)5.7.2 Slave-to-slave 功能配置: (87)5.7.3 从站参数配置 (88)5.7.4激活Slave to Slave 功能 (89)第六章 S120 DCC功能 (90)第七章自由功能块 (97)第八章 SINAMICS S120 参数简介 (98)第九章 S120的故障与报警 (101)相关参考手册 (102)IA&DT Service & Support Page 3-104第一章 S120产品介绍Sinamics S120集矢量控制与伺服控制于一身,分为DC-AC与AC-AC两种类型,所谓DC-AC,是指控制单元、整流、逆变都为独立模块,目前DC-AC类型功率范围从0.9kw到1200kw,AC-AC模块由控制单元和功率模块组成,功率范围从0.12到250kw。
S120调试总结

西门子S120(5#桥)调试总结整理人:韦同旺一..Drive-CLIQ电缆连接方式:如图1中为CU320与主起1#,主起2#,小车的Motor Module的Drive-CLiQ的连接方式如图2 中为CU320与大车变频器的连接方式Drive-CLiQ连接方式有两种:一种是串联方式(站点比较多的时候运用,但一个网口最多能够串联8个部件),一种为并联方式(上图使用的就是并联方式)备注:ALM的Drive-CLiQ以连接完成。
二.编码器的接线1.编码器采用的是HID100H Incremental编码器端接线方式为: Brown----------------Vcc DC24V正极White-----------------0V DC 负极Green-----------------A+ 信号线A+Yellow----------------B+ 信号线B+SMC30端接线方式为: X521端子号1 -----------A+ 信号线A+X521端子号3-----------B+ 信号线B+X531端子号1------------Vcc DC24V正极X531端子号2------------0V DC 负极三.ALM接线1.检查ALM接线若内部没有给预充电K4供电时,需外供AC 220V电源若内部没有风机供电电源时,需外供AC 220V电源若内部没有供DC 24V电源时,需外供DC 24V电源四.通讯及逆变器是否正常1.硬件组态下载到PLC中,打开STARTER软件,新建一个项目,首先使用网线使CU320与电脑进行连接。
在组态中,点击自动搜索后,会自动完成对CU320的搜索,完成后把项目上传到电脑中。
根据硬件组态中的地址进行设置并对CU320上的地址进行设置(STARTER 中会显示设置的方式)。
在硬件组态中查看通讯是否正常,正常时各CU320上DP指示灯常亮。
2.当DC24V送电后,检查各逆变器模块的指示灯,若显示红灯时则模块不正常。
2024西门子S120驱动器入门教程CU320

西门子S120驱动器入门教程CU320•驱动器简介与基本概念•硬件安装与接线指导•软件配置与参数设置详解•运动控制功能实现目•维护与保养建议•总结与展望录01驱动器简介与基本概念它提供了广泛的功率范围和模块化设计,可灵活适应不同的机械和控制需求。
S120驱动器采用了先进的控制算法,确保了精确、快速和稳定的运动控制。
西门子S120是一款高性能的驱动器,专为满足现代工业应用而设计。
西门子S120驱动器概述CU320是S120驱动器的控制单元,负责驱动器的控制和通信任务。
它具有强大的处理能力和丰富的接口,可连接多种编码器和传感器。
CU320还支持多种控制模式,包括速度控制、位置控制和力矩控制等。
CU320控制单元特点西门子S120驱动器广泛应用于机械制造、印刷、包装、纺织等领域。
其主要优势在于高精度控制、快速响应、高可靠性和易于维护等方面。
此外,S120驱动器还支持多种现场总线协议,方便与上位机或PLC进行通信。
应用领域及优势分析驱动器控制单元编码器传感器相关术语解释一种电力电子设备,用于控制电机的速度、位置和力矩等参数。
一种测量装置,用于检测电机的位置和速度等参数。
驱动器的核心部件,负责处理控制信号和通信任务。
一种检测装置,用于检测电机的电流、电压、温度等状态参数。
02硬件安装与接线指导西门子S120驱动器CU320外观紧凑,结构坚固,适应各种工业环境。
接口丰富,包括电源接口、编码器接口、通讯接口等,满足各种连接需求。
驱动器面板上配有LED显示屏和按键,方便用户进行参数设置和故障诊断。
驱动器外观及接口介绍电源连接注意事项确保电源电压与驱动器额定电压相匹配,避免过压或欠压对驱动器造成损坏。
电源线应使用符合规格的电缆,并确保接线牢固、可靠。
对于大功率驱动器,应考虑电源线的线径和长度,以减小压降和温升。
编码器电缆连接方法01编码器电缆应使用屏蔽电缆,以减小电磁干扰对编码器信号的影响。
02电缆长度不宜过长,一般不超过50米,以减小信号衰减和干扰。
S120调试手册

S120 培训手册1. 硬件1.1伺服系统的基本构成如上图所示,一个基本的S120伺服系统由以下几部分组成:用于系统控制的中心控制单元,用于供电的电源块,用于驱动伺服电机的电机模块以及连接各个模块的DRIVE-CLIQ接口系统。
下面,我们分别来对这些单元来作简单介绍。
1.2中心控制单元 CU320控制单元 CU320-2 PN 是一个中央控制模块,可实现对单个或多个电源模块和/或电机模块的开环和闭环控制功能。
接口说明∙X100 - X103 DRIVE-CLiQ 接口DRIVE-CLIQ接口用于S120系统内部模块的连接,在我们的项目中,使用西门子DRIVE-CLIQ 电缆将CU320上的X100口与电机模块上的X200口相连接。
∙X122 数字量输入/输出接口在本项目中,只使用了X122的第1个输入端子,作为伺服电机的急停使用。
连接的7、8号端子,作为参考电位,只有在连接参考电位的情况下,数字输入才可以工作。
∙X132 数字量输入/输出项目中,出于这个输入输出,并没有使用有意义的输入或输出信号,只是连接了7、8号电子电位,留作备用。
∙X124 电源此端子为CU320的电源端子,连接DC 24V电源及参考电位。
∙X150 P1 / P2 PROFINET接口PROFINET接口用于与PLC进行数据传输,此处我们使用X150 P1连接至我们的交换机上。
另外,两个 PROFINET 接口各有一个绿色和一个黄色的 LED 用于诊断。
LED 可显示下列状态信息:∙存储卡注意1:在运行期间插拔存储卡会导致设备停止的危险。
如果在运行期间插拔存储卡,可导致数据丢失并有可能引起设备停止。
•仅在控制单元断电状态下才可插拔存储卡。
•只允许按照上图所示插入存储卡(箭头在上方朝右指)注意2:连同存储卡一起寄出控制单元会导致数据丢失危险在寄回损坏的控制单元时,存储卡上已有的数据信息(参数、固件、授权等)在维修和测试期间有可能丢失。
03 S120参数复制

S120(CU320)下驱动参数的保存与复制在S120调试的过程中经常遇到一个项目中有几个相同的驱动需要设置相同的参数,在CU320的系统中往往需要重复设置,现介绍一下CU320下驱动参数的保存与复制
一.参数的保存
1.打开”Expert List”列表:
Server_06的参数已设置好,右击”Server_06 →Expert →Expert List”打开参数列表
2.保存Server_06的参数设置值
将Server_06的参数设置保存至copy.xml
二.参数的复制
1.配置好Server_05(如下图)
2.打开Server_05的”Expert List”
将刚才在Server_06保存的参数设置(copy.xml)复制至Server_05
这样Server_06的参数设置便复制至Server_05了。
若有其他相同的驱动需设置参数也可采用这样的方法进行参数复制。
注意:在参数导入复制前,必须将该驱动的configuration完成(必须选好是Vector还是Servo以及相应的选项),以上的操作都在离线状态下进行操
作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、在PLC硬件组态里先配置好CU320:在Survey栏目配置好Control Unit控制器、INFEEDS电源和DRIVES驱动器的TELEGRAM报文。
在Detail 栏目配置报文长度和地址。
2、配置完成后编译并保存,在Step7中会自动生成一个伺服配置:3、双击在STARTER中打开所配置的伺服,选择ONLINE,在线前需要将CU320的DP拨码设置成和硬件组态中定义的一致。
4、在线后左边栏目中会出现AutoConfiguration选项,点击后选择Servo后会自动生成一个基本配置(包括Control Unit控制器、INFEEDS电源和DRIVES驱动器,参数是自动读取上来的),首先需要对INFEEDS 和DRIVES配置CONFIGURATION(默认既可):5、然后根据实际项目需要可能需要更改INFEEDS和DRIVES中的一些参数EXPERT—-EXPERT LIST: INFEEDS: P10 –0 READY;1—QUICK COMMISSIONING(修改某些参数时需要在1状态,修改完成后需要改为0), P210 Drive unit line supply voltage驱动器实际供电电压可能和选型不一致。
DRIVES: Change parameter p1821 if need to change direction,p2571 for max speed, p2572 for acceleration adjust,p2573 for deceleration adjust,p2585 jog speed如果采用手动方式,需要在Configure drive unit窗口中逐步配置,并修改以上的参数。
6、报文配置(包括控制器、电源和驱动器):COMMUNICATION--PROFIBUS7、配置结束后再执行一次DOWNLOAD到PG和ROM。
8、基本控制JOG方式:COMMISSIONING – CONTROL PANEL(必须在ONLINE)9、设置原点:在HOMING弹出界面中按照需要的方式设置,设置完成后可以看到REFERENCE POINT SET左边状态灯变成绿色。
10、原点设置完成后,再次下载(将原点设置保存到ROM中),断开PC控制,由PLC通过正确的报文来控制。
遇到的问题和解决方法:1、出现SMART MODE 和不支持同步方式的报警:需要在TOPOLOGY界面里将set和actual的树形结构变成一致(下面截图为离线状态,连线后会同时出现set 和actual的比较画面)。
2、出现p1248[0...n] DC link voltage threshold lower报警:需要对drive的configuration中进行逐步配置:3、出现control panel 中switch-on disable is active 的问题:infeeds中参数r898.6被置位了,检查程序。
(可以将fb13的NW10中的L 0.0 BYTE 2 更换为DB1.DBX0.0 BYTE 2,其中DB1为自己新建,内容和TEMP 区ZSWA结构一样。
)4、如果是online状态下修改参数,要使修改参数生效,应该先执行项目上传,然后再下载到ROM中。
5、下载过程如果出现错误,可能需要先按下急停,断开plc的控制。
6、FB86中代码说明:读/写参数号读/写数值将P2507参数写数值2,将当前位置置0,并将偏移值写入P2525。
下面指令是将变化写入到ROM中:参考点设置方法参考文档S120通过111报文实现基本定位功能.pdf(P9-15)绝对值编码器的回零方式有3种:1.主动回零2.直接设置参考点:激活定位功能,接通运行使能P840,激活设置参考点命令P2596,将当前位置设置为P2599中的数值(比如0)。
3.被动回零:启动寻零位,让伺服运动(JOG或MDI),当P488/489定义好的快速输入接通,将当前位置设为0。
以上3中方法,只有第一种方法可以掉电保存。
实际电流值(扭矩)的转换:PCD_RD.RD_PCD.Torque(通过报文读来的电流/扭矩数值,可设置)/4000H(4000H对应100%),这个比数代表着实际扭矩和设定的基值电流/扭矩(基值电流在P2002中设置,默认是100A;参考扭矩在P2003中设置,默认是1NM)的百分比。
S120的一些常用参数:实际速度,电流,扭矩显示值(平滑处理过,100ms),未处理的过程实际值为r63,r68,r80速度,电压,电流,扭矩,功率,角度和加速度的基值:PLC→S120的报文(telegram111):S120→PLC的报文(telegram111):安全停车功能:硬件上:由于111报文此处为预留地址,用户可在此自行指定报文内容两个端子必须同时动作,否则会产生错误。
相关参数:P9601,9602,P9501对于带抱闸的电机:1.P1215必须设置为1-3,如果设置为0,即使电机运行,抱闸将一直关闭,直到烧毁。
2.如果要使抱闸一直打开,可以将P855设为1.3.当P1215=1或者3,下面这些信号的丢失都会导致抱闸关闭:p0844, p0845 or p0852 or as a result of a fault withOFF2 response4.如果导入的配置中选了"no holding brake present",系统会自动识别抱闸的类型,如果检测到抱闸,将自动将配置改为"motor holding brake as for sequence control".5.如果使用的是电机内部抱闸,P1215不能设为3.6.如果使用的是外部抱闸,P1215=3,且必须指定给r0899.12一个外部信号。
7.When the function module "extended brake control" is activated (r0108.14 = 1), r1229.1 should be interconnectedas control signal.The parameter can only be set to zero when the pulses are inhibited.The parameterization "no motor holding brake available" and "Safe Brake Control" enabled (p1215 = 0, p9602 = 1, p9802 = 1) is not practical if there is no motor holding brake.The parameterization "motor holding brake the same as sequence control, connection via BICO" and "Safe Brake Control" enabled (p1215 = 3, p9602 = 1, p9802 = 1) is not practical.如果使用的是安全抱闸继电器,第二个选项必须设置为Brake control with diagnostics evaluation 。
如果使用的是普通抱闸继电器,第二个选项必须设置为Brake control without diagnostics evaluation 。
参考Adobe Acrobat 7.0Documentp2571 EPOS maximum velocityChangeable: U T Calculated: - Access level: 1 Data type: Unsigned32 Dynamic index: - Function diagram: 3630Object: SERVO (EPOS), VECTOR (EPOS) P group: Basic positioner Version: 2603900Group of units: - Unit selection: -Not for motor type: - Expert list: 1 MinMaxFactory setting 1 [1000 LU/min]40000000 [1000 LU/min] [0] 30000 [1000 LU/min] Description:Sets the maximum velocity for the function module "basic positioner" (r0108.4). Dependence:see also: r1084, r1087, p2503, p2504, p2505, p2506Note:The maximum velocity is active in all of the operating modes of the basic positioner. The maximum velocity for the basic positioner should be aligned with the maximum speed/velocity of the speed/velocity controller:Rotary encoders:p2571[1000 LU/min] = min(|r1084|, |r1087|)[1/min] x p2505/p2504 x p2506/1000Linear encoders:p2571[1000 LU/min] = min(|r1084|, |r1087|)[m/min] x p2503/10[m]P2571Y----15A,3000RPM 72000T----15A,3000RPM 72000X----8A,6000RPM 100000。