V90伺服111报文插入及使用学习资料
v90标准报文3详细解说
v90标准报文3详细解说v90标准报文是一种用于传输数据的协议。
它是一种二进制协议,用于在计算机网络中传输和交换数据。
v90标准报文3是在v90标准报文的基础上进行了一些改进和扩展,以提高传输效率和可靠性。
v90标准报文3的详细解说可以从以下几个方面展开:一、报文格式:v90标准报文3采用了一种新的报文格式,具体结构如下:-报文头:包含了报文的一些基本信息,比如报文类型、报文长度等。
-报文体:包含了实际的数据内容。
二、报文类型:v90标准报文3定义了多种报文类型,用于标识不同的数据传输场景。
常见的报文类型包括数据报文、心跳报文、配置报文等。
不同的报文类型有着不同的结构和用途。
三、数据传输机制:v90标准报文3使用了一种高效的数据传输机制,可以实现可靠的数据传输。
具体来说,它引入了序列号、确认机制和重传机制等功能。
发送方会给每个报文分配一个唯一的序列号,接收方收到报文后会发送确认报文给发送方,发送方在收到确认报文后会继续发送下一个报文。
如果发送方在一定时间内没有收到确认报文,会进行重传,确保报文的可靠传输。
四、数据压缩和加密:v90标准报文3支持数据压缩和加密功能,可以在传输过程中对数据进行压缩和加密,以提高传输效率和安全性。
数据压缩可以减小数据量,减少传输时间和带宽占用。
数据加密可以保护数据的机密性,防止数据被恶意篡改或窃取。
五、流控制:v90标准报文3引入了流控制机制,用于控制数据的发送速率,以避免网络拥塞和数据丢失。
发送方会根据接收方的处理能力和网络状况动态调整数据发送速率,确保数据的稳定传输。
六、可扩展性:v90标准报文3具有较好的可扩展性,可以根据实际需求进行扩展和定制。
用户可以自定义报文的格式和内容,以满足不同的数据传输需求。
v90标准报文3作为一种高效的传输协议,广泛应用于计算机网络中的数据传输场景。
它具有较高的传输效率、可靠性和安全性,可以满足多种数据传输需求。
在实际应用中,我们可以根据具体的需求和网络环境选择是否使用v90标准报文3,并根据需要进行定制和扩展。
【技成周报26期】S7-1500控制V90伺服详解及欧姆龙SPED指令问题汇总

【技成周报26期】S7-1500控制V90伺服详解及欧姆龙SPED指令问题汇总本周春节档直播课堂问题来源《S7-1500控制V90伺服实现三种位置控制详解》《欧姆龙脉冲输出SPED指令》技术问题汇总整理。
扫码二维码即可观看录播回放哦《S7-1500控制V90伺服实现三种位置控制详解》课堂资料下载,关注公众号:PLC发烧友,回复:V90问:这个既然不灵活,为啥不用GSD文件方式呀?答:这个根据实际的应用场合来说,一些简单的定位控制可以采用HSP方式实现,位置环直接做在PLC侧,伺服不需要做任何的操作设置,PLC编程比较简单,拖拽几下就基本搞定了。
问:我电脑已经装了博途和其他软件影响吗?答:如果是今天讲课所用到的功能块或者组态文件,那么不影响,这些都是另外添加进去的,需要注意下载时要对应软件版本,然后添加即可。
问:105 111报文各自的优缺点是?答:v90可通过组态HSP和GSD两种方式实现控制,其中HSP 文件用工艺对象组态,位置环直接做在PLC侧,报文改不了,就是105,编程简单拖拽几下就基本搞定了,不需要在伺服测进行任何配置;而GSD文件则比较灵活,既可以在把位置环做在驱动侧,也可做在PLC侧,并且报文的选择也多了;如果位置环做到了驱动侧,我们还要用V-assistance调试软件来设定V90一些参数,控制模式改为EPOS功能。
问:3个轴可以同时调用FB284做绝对定位控制吗?答:可以的,FB284功能块是根据设备视图中报文 111 的硬件标识符来判断对应哪个轴的。
问:多个伺服的情况下,FB284怎么区分控制的伺服?答:S7-1200、1500PLC是通过V90 设备视图中的 111 报文硬件标识符来判断控制的是哪台伺服;S7-300、400PLC是通过设定值符号名或硬件标识符来判断控制的是哪台伺服。
问:回原点模式选择3 的时候,Position管脚的定义原点位置值还起作用吗?答:起作用的,模式选择为3的时候,工艺对象定位轴/同步轴将根据组态执行回原点运动,完成该运动之后,轴被定位在参数“Position”的值指定的位置。
V90Epos回零整理
V90在Epos 模式下的回零操作整理(修订)1. V90 驱动器连接增量编码器伺服电机的主动回零V90 PN 与PLC 间通过PROFINET连接,使用标准西门子111 报文,PLC 控制V90 PN 时使用FB284(SINA_POS)功能块,主动回零有以下 2 种方式:1.1 通过参考点挡块(回零开关)及编码器零脉冲回零,P29240=1 回零编程步骤如下:(1) 设置FB284 工作模式:ModePos=4(2) 将参考点挡块输入信号(回零开关)连接到功能块管脚ConfigEPos bit 6(3) 设置EnableAxis=1 使能轴(4) 设置ExecuteMode=1 执行回参考点运行,此时轴开始回零运行回零运行过程:轴加速到速度p2605 搜索参考点挡块。
当到达参考点挡块时( Pos_STW2.2:0→1),伺服电机减速到静止状态。
此时,轴开始反向加速到速度p2608 ,当离开参考点挡块后 (Pos_STW2.2:1→0),搜索编码器的零脉冲,当遇到编码器第一个零脉冲,轴反向加速以速度p2611 运行偏移距离p2600 后停止在参考点,并将p2599 设置成参考点的位置值,V90 数字量输出信号REFOK =1。
回参考点完成后功能块管脚AxisRef 状态变为1。
1.2 仅编码器零脉冲,P29240=2 回零编程步骤如下:(1) 设置FB284 工作模式:ModePos=4(2) 设置EnableAxis=1 使能轴(3) 设置ExecuteMode=1 执行回参考点运行,此时轴开始回零运行回零运行过程:轴按照P2604 定义的搜索方向,以最大加速度P2572加速至搜索速度P2608 搜索编码器的零脉冲,搜索到零脉冲后,轴以速度P2611 运行偏移距离p2600 后停止在参考点,并将p2599 设置成参考点的位置值,V90 数字量输出信号REFOK =1。
回参考点完成后AxisRef 状态变为12. V90 驱动器连接绝对值编码器伺服电机的回零绝对值编码器回零有以下 3 种方式:2.1 通过V-ASSISTANT 软件设置操作步骤:(1) 设置参考点位置坐标值( P2599)(2) 执行设置回参考点( P2507)如图2-1 所示图2-1 通过V-Assist 实现绝对值电机回零(3) 执行保存参数到ROM中2.2 通过BOP面板可通过BOP 功能菜单"ABS" 来设置绝对值编码器的当前位置至零位。
V9011数据手册
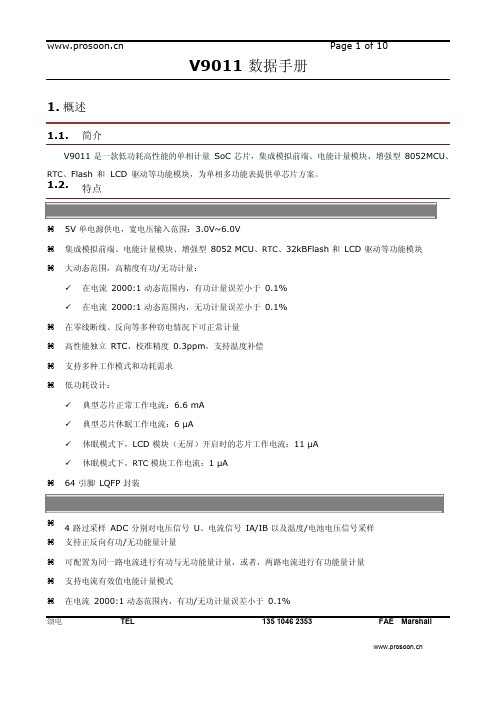
1.3.
系统框图
V9011
电压传 感器
UP UN IAP IAN IBP IBN
+ _ + _ + _ _ +
调制器 比差校准 调制器 抽取滤波 高通滤波 电能计量及 CF脉冲产生
电流传感器
调制器
测温电路
校表参数
功率、有效 值等计量
数据存储器
多功能测量 通道
调制器 SRAM 32768Hz
OSC
系统控制 定时器 中断管理
1.2.4. MCU 特点
高性能 8 位 8052 兼容 MCU 内核 集成 32kBFLASH 存储器,具有写保护和加密功能,支持 ISP 和 IAP 集成 1kBSRAM 存储器 集成 JTAG 实时调试系统 提供 4 路全速 UART,其中一路支持红外方式通信(带有载波调制电路) 充裕的定时器资源,提供最多 7 个硬件定时器 集成 26×4 共 104 段 LCD 驱动电路,支持多种扫描频率;支持电阻分压驱动;支持 3.0V/3.3V/3.5V 驱动电压
FAE ÿ�Marshall
Page 4 of 10
V9011 数据手册
1.4. 引脚功能说明
P5.1/SEG9 P5.0/SEG8 P4.7/SEG7 P4.6/SEG6 P4.5/SEG5 P4.4/SEG4 P4.3/SEG3 P4.2/SEG2 P4.1/SEG1 P4.0/SEG0 P3.3/COM3 P3.2/COM2 P3.1/COM1 P3.0/COM0
5V 单电源供电,宽电压输入范围:3.0V~6.0V 集成模拟前端、电能计量模块、增强型 8052 MCU、RTC、32kBFlash 和 LCD 驱动等功能模块 大动态范围,高精度有功/无功计量: 在电流 2000:1 动态范围内,有功计量误差小于 0.1% 在电流 2000:1 动态范围内,无功计量误差小于 0.1%
V90使用基础

第1章Mastercam V9.0使用基础1.1 Mastercam V9.0简介Mastercam软件是美国CNC Software,INC所研制开发的CAD/CAM系统,是最经济且高效率的全方位软件系统,包括美国在内的各工业大国皆采用本系统作为设计、加工制造的首选软件。
Mastercam 同时作为PC级CAM软件,全球销售量名列前茅,被工业界及学校广泛采用。
以美国和加拿大教育单位来说,共计有2500多所高中、专科大学院校将其用于机械制造及NC程序编制,在中国大陆机械制造业及教育单位的占有量也是最多的。
它是一套非常成功的软件。
最初的Mastercam是基于DOS平台的,从5.0版开始,顺应软件发展的趋势,转向基于Windows 平台,版本从5.0、6.0一直发展到现在国内普遍应用的8.1、9.0版。
Mastercam是一套全面服务于制造业的数控加工软件,它包括设计(Design)、车削(Lathe)、铣削(Mill)、线切割(Wire)4个模块。
其中设计模块主要用于绘图和加工零件的造型;车削模块主要用于生成车削加工的刀具路径;铣削模块主要用于生成铣削加工的刀具路径;线切割模块主要用于生成电火花线切割的加工路径。
其中后3个加工模块内也包括设计模块中的完整设计功能。
本书将针对Mastercam的Mill和Wire两个广泛应用的数控加工模块进行细致的讲解。
Mastercam 软件的Mill和Wire是非常优秀的、应用于数控铣、加工中心和慢走丝线切割辅助编程的软件,能高效地编制各种铣、线数控加工程序。
用它可快速设计、加工机械零件,还可组织、管理相关的文档。
无论是3D几何建模还是二维、三维编程,Mastercam都提供了强大的功能。
下面简单介绍其在造型设计和制造加工中的优势。
1.1.1 零件造型简介❑Mastercam具有完整的曲线曲面建模功能,便于建立2D、3D几何模型。
❑完美地处理复杂曲面轮廓的相交。
V90基本定位器控制(EPOS)常问问题
V90基本定位器控制(EPOS)常问问题目录1:SINA_POS怎样实现主动回零(带增量编码器V90,使用参考挡块+编码器零脉冲方式回零时),参考挡块回零开关接到哪里,怎样配置?2:硬件限位开关怎么接,怎样激活硬件限位功能?3:运行命令给出后轴不运行?4:如何激活软件限位开关?5:excute触发定位动作时90 PN无响应?6:V90 PN 为什么找不到111报文?7:在博途中组态V90 PN时为什么找不到111报文?8:使用STEP7软件,如何实现S7-300/400控制V90PN位置控制?9:怎样设置机械结构、减速比、模态轴,模态范围怎么设置?10:EPOS 可以实现位置同步控制吗?11:FB284如何对ConfigEpos管脚进行配置?12:FB284中HWIDSTW/HWIDZSW怎么填写?13:绝对值编码器如何回零?14:SINA_POS 转速设置及实际值显示?15:绝对值编码器掉电后位置丢失怎么办?16:FB284怎样实现绝对定位控制?17:FB284怎样实现相对定位控制?18:FB284怎样实现连续运行模式控制?19:FB284怎样实现程序块运行控制?20:FB284怎样实现点动"Jog"控制?21:EPOS模式下机械参数如何设置?带增量编码器V90,使用参考挡块+编码器零脉冲方式回零时,参考挡块回零开关接到哪里,怎样配置?回零开关连接到一个PLC的数字量输入点,PLC内编程将其状态关联到FB284功能块ConfigEPos输入引脚的bit6。
(1)将V90参数P29240设置为1(选择参考挡块+零脉冲方式回零);(2)将回零开关连接到一个PLC的数字量输入点;(3)在PLC内编程,将回零开关DI点的状态关联到FB284功能ConfigEPos输入引脚的bit6;(4)FB284功能块选择工作模式ModPos=4;(5)通过输入参数OverV、OverAcc、OverDec指定速度、加减速度的倍率(100%); (6)驱动的运行命令EnableAxis=1;(7)运行条件"CancelTransing" 及"IntermediateStop"必须设置为"1",Jog1 及Jog2 必须设置为"0"。
西门子V90伺服通过附加报文实现力矩限幅

二,支持附加报文的版本要求
V90 PN通过 PROFINET 总线与 PLC进行连接,V90 PN驱动器需要使用新固件FW V1.3,
它支持附加报文750,可在标准报文上增加750附加报文来实现轴的转矩限幅及附加转矩给
定功能。
Hale Waihona Puke 如何升级V90固件,请参阅相关课件。
四,实例组态 1,组态PLC
新建项目
添加新硬件 选择相应的PLC (型号,版本)
确定
四,实例组态 2,组态V90
网络视图
SINAMICS
硬件目录 其它现场设备 PROFINET IO
SINAMICS V90 PN V1.0
分配PLC
Drivers SIEMENS AG
四,实例组态 3,组态通讯报文 设备视图 硬件目录 子模块 选择标准报文3 选择附加报文750
但因 PLC版本的问题,在工艺对象里面仅支持标准报文1-4
三,实例组态 4,组态工艺对象
编码器
选择标准报文
其他工艺对象选项不详细介绍
四,实例组态 5,程序编辑
设定力矩值换算: 16384=4000 hex = p2003 =9.64N.M
四,实例组态 5,程序编辑
根据报文组态里面的地址和附加报文结构,把力矩值直接赋值给驱动器。
在TIA Portal中安装高版本的GSD文件 : GSDML-V2.32-Siemens-Sinamics_V90-20180321.xml
三,附加报文结构 在通过参数 p8864 设置辅助报文之前,必须首先通过 p0922 选择一个主报文。若更 改了主报文,辅助报文会被自动禁用,因此,在更改 p0922 之后,必须重新设置 p8864。
西门子111报文详解

西门子111报文详解Drive01_STW1_BIT11BOOL FALSE Drive01_STW1_BIT12BOOL FALSE Drive01_STW1_BIT13BOOL FALSE Drive01_STW1_BIT14BOOL FALSE Drive01_STW1_BIT15BOOL FALSE Drive01_STW1_BIT0BOOL FALSE Drive01_STW1_BIT1BOOL TRUE Drive01_STW1_BIT2BOOL TRUE Drive01_STW1_BIT3BOOL TRUE Drive01_STW1_BIT4BOOL TRUE Drive01_STW1_BIT5BOOL TRUE Drive01_STW1_BIT6BOOL FALSE Drive01_STW1_BIT7BOOL FALSE Drive01_POS_STW1_BIT8BOOL FALSE Drive01_POS_STW1_BIT9BOOL FALSE Drive01_POS_STW1_BIT10BOOL FALSE Drive01_POS_STW1_BIT11BOOL FALSE Drive01_POS_STW1_BIT12BOOL FALSE Drive01_POS_STW1_BIT13BOOL FALSE Drive01_POS_STW1_BIT14BOOL FALSE Drive01_POS_STW1_BIT15BOOL FALSE Drive01_POS_STW1_BIT0BOOL FALSE Drive01_POS_STW1_BIT1BOOL FALSE Drive01_POS_STW1_BIT2BOOL FALSE Drive01_POS_STW1_BIT3BOOL FALSE Drive01_POS_STW1_BIT4BOOL FALSE Drive01_POS_STW1_BIT5BOOL FALSE Drive01_POS_STW1_BIT6BOOL FALSE Drive01_POS_STW1_BIT7BOOL FALSE Drive01_POS_STW2_BIT8BOOL FALSE Drive01_POS_STW2_BIT9BOOL FALSE Drive01_POS_STW2_BIT10BOOL FALSE Drive01_POS_STW2_BIT11BOOL FALSEDrive01_POS_STW2_BIT12BOOL FALSE Drive01_POS_STW2_BIT13BOOL FALSE Drive01_POS_STW2_BIT14BOOL FALSE Drive01_POS_STW2_BIT15BOOL FALSE Drive01_POS_STW2_BIT0BOOL FALSE Drive01_POS_STW2_BIT1BOOL FALSE Drive01_POS_STW2_BIT2BOOL FALSE Drive01_POS_STW2_BIT3BOOL FALSE Drive01_POS_STW2_BIT4BOOL FALSE Drive01_POS_STW2_BIT5BOOL FALSE Drive01_POS_STW2_BIT6BOOL FALSE Drive01_POS_STW2_BIT7BOOL FALSE Drive01_STW2_BIT8BOOL FALSE Drive01_STW2_BIT9BOOL FALSE Drive01_STW2_BIT10BOOL FALSE Drive01_STW2_BIT11BOOL FALSE Drive01_STW2_BIT12BOOL FALSE Drive01_STW2_BIT13BOOL FALSEDrive01_STW2_BIT1BOOL FALSE Drive01_STW2_BIT2BOOL FALSE Drive01_STW2_BIT3BOOL FALSE Drive01_STW2_BIT4BOOL FALSE Drive01_STW2_BIT5BOOL FALSE Drive01_STW2_BIT6BOOL FALSE Drive01_STW2_BIT7BOOL FALSE Drive01_OVERRIDE WORD W#16#100 Drive01_MDI_TARPOS DWORD DW#16#0 Drive01_MDI_VELOCITY DWORD DW#16#0 Drive01_MDI_ACC WORD W#16#0 Drive01_MDI_DEC WORD W#16#0 Drive01_FREE_W WORD W#16#0 Drive01_ZSW1WORD W#16#0 Drive01_POS_ZSW1WORD W#16#0 Drive01_POS_ZSW2WORD W#16#0 Drive01_ZSW2WORD W#16#0 MELDW WORD W#16#0 Drive01_XIST_A DWORD DW#16#0 Drive01_XIST_B DWORD DW#16#0 Drive01_FAULT_CODE WORD W#16#0 Drive01_WARN_CODE WORD W#16#0 Drive01_FREE_R WORD W#16#0//JOG1 点动命令 p2589=r2090.8//JOG2 点动命令 p2590=r2090.9control via plc; p0854=r2090.10;//启动回零 p2595=r2090.11reserved ;/ external block change P2632=1;P2633=r2090.13//p2613=r2090.14//p2614=r2090.15//启动变频器;p0840=r2090.0OFF2;P0844=r2090.1OFF3; P0848=r2090.2enable operation; p0852=r2090.3//P2641=r2090.4: 0: 停止当前任务,以最大减速度 p2573 停机//P2640=r2090.5: 0: 停止命令,以 P2645 的减速度停车//P2650=r2090.6: 数据输入开关,上升沿进行单步数据传输//激活 traversing block, P acknowledge fault; p2103=r2090.7 //p2648=r2091.8: 1: 绝对位置模式;0:相对位置模式//P2651=r2091.9: 速度模式正向运行//P2652=r2091.10: 速度模式反向运行reserved//p2649=r2091.12: 1: 连续数据传输; 0:单步运行reserved//MDI 模式选择, P2653=r2091.14 0:位置模式 1:速度模式//激活MDI, P2647=r2091.15//选择程序步 bit0: p2625=r2091.0//选择程序步 bit1: p2626=r2091.1//选择程序步 bit2: p2626=r2091.2//选择程序步 bit3: p2626=r2091.3//选择程序步 bit4: p2626=r2091.4//选择程序步 bit5: p2626=r2091.5reservedreserved//回零方式(0:Active homing;1: passive homing); p2597=r2092.8//回零启动时的方向(0:从正向开始回零;1:从反向开始回零);p2604=r2092.9//external block change p2632=0; p2510=r2092.10//external block change p2632=0; p2511=r2092.11reservedreserved//p2582=r2092.14 软限位开关激活//p2568=r2092.15 stop cam 激活//p2655[0]=r2092.0 激活 tracking mode//将当前位置直接设置成零点 p2596=r2092.1//CAM 信号 p2612=r2092.2reservedreserved//点动模式 p2591=r2092.5reservedreservedreservedreservedreserved//电机切换的反馈信号,p0828=r2093.11//p2045=r2050[3];profidrive 时钟同步信号//p2045=r2050[3];profidrive 时钟同步信号//p2045=r2050[3];profidrive 时钟同步信号//p2045=r2050[3];profidrive 时钟同步信号//驱动数据组切换 p0820[0]=r2093.0//驱动数据组切换 p0821[0]=r2093.1//驱动数据组切换 p0822[0]=r2093.2//驱动数据组切换 p0823[0]=r2093.3//驱动数据组切换 p0824[0]=r2093.4reservedreserved//parking axis; p0897=r2093.7Drive01_OVERRIDE 对应r2050[4];p2646=r2050[4]; 需要设置一个值,//p2642=r2060[5] MDI 位置给定(单位:LU);//p2643=r2060[7] MDI 速度给定(单位:1000LU/min)//2644=r2050[9] MDI 加速度(4000h 对应100%)//2645=r2050[10] MDI 减速度(4000h 对应100%)//自由连接的过程数据字p2051[0]=r2089[0]=p2080[0...15]p2051[1]=r2089[3]=p2083[0...15]p2051[2]=r2089[4]=p2084[0...15]p2051[3]=r2089[1]=p2081[0...15]p2051[4]=r2089[2]=p2082[0...15]p2061[5]=r2521 位置实际值p2061[7]=r0063[0] 转速实际值p2051[9]=r2131p2051[10]r2132自由连接。
V90 EPOS控制相关参数设置

V90 EPOS控制相关参数设置
PLC通过PROFINET与V90 PN伺服驱动器搭配进行位置控制,使用V90 PN的其本定位功能(EPOS)时,需要使用调试软件V-Assistant对V90 PN进行项目配置。
1. 设置控制模式为"基本位置控制(EPOS)"
2. 配置通信报文为西门子报文111
3. 点击"设置PROFINET->配置网络",设置V90的IP地址及设备名称
注意:设置的设备名称一定要与S7-1500项目中配置的相同。
参数保存后需重启驱动器才能生效。
4. 设置机械结构相关参数
需要设置正确的齿轮比,以及设置负载转动一圈物体移动距离所对应的长度单位(LU)。
如果定义1LU对应0.001mm,负载转动一圈移动10mm,则此时负载转动一圈对应的长度单位为10000LU。
5. 设置基本定位功能的相关参数
可设置最大加减速度,运行程序段的参数、Jog点动参数和定位监控窗口参数。
6. 设置回零相关参数
7. 其他相关基本定位参数,在参数列表中设置。
V90 EPOS控制相关参数设置

V90 EPOS控制相关参数设置
PLC通过PROFINET与V90 PN伺服驱动器搭配进行位置控制,使用V90 PN的其本定位功能(EPOS)时,需要使用调试软件V-Assistant对V90 PN进行项目配置。
1. 设置控制模式为"基本位置控制(EPOS)"
2. 配置通信报文为西门子报文111
3. 点击"设置PROFINET->配置网络",设置V90的IP地址及设备名称
注意:设置的设备名称一定要与PLC项目中配置的相同。
参数保存后需重启驱动器才能生效。
4. 设置机械结构相关参数
需要设置正确的齿轮比,以及设置负载转动一圈物体移动距离所对应的长度单位(LU),例如定义1LU对应0.001mm,齿轮比为1:1,而负载
移动一圈的距离为10mm,则此时负载转动一圈对应的长度单位为10000LU。
5. 设置基本定位功能的相关参数
可设置最大加减速度,运行程序段的参数、Jog点动参数和定位监控窗口参数。
6. 设置回零相关参数
7. 其他相关基本定位参数,在参数列表中设置。
利用西门子S7-315控制西门子伺服V90详解
一.目录1.西门子伺服V90介绍2.利用315控制V90的方法-------------------------------------------------------P1.P33.机器人手动模式;-------------------------------------------------------P44.机器人启动自动化;-----------------------------------------------------P55.常见问题及解决方法;二.西门子伺服V90介绍1.V90驱动系统连接,下图介绍了V90接线配置示例:图12.V90伺服软件安装及使用方法介绍:(1).调试之前需要安装伺服控制软件V-ASSISTANT.(version 1.05.02).(2)按照要求设置控制模式:速度控制/位置控制。
(3)以位置控制(EPOS)介绍方法:点击set PROFINET-The current telegram:选择111报文。
(4)Configure network 中设置站名以及IP地址,设置完成后点击Save and active 按钮。
如下图:图2(5)可以通过软件Commission 中的测试点击画面,JOG方式操作电机正反转。
3.利用博途V14/V15控制V90步骤:(1)安装GSD文件v2.32后完成组态:注意博途软件需要安装Start drive 安装包后在全局库中找到西门子自带的功能块FB284-SINA_POS。
将SINA_POS功能块拖拽到需要创建的位置。
块中的各种引脚功能详见下图:图3图4注:根据引脚说明赋值即可,使用315CPU时Laddrsp/LaddrAV赋值跟组态地址一致。
(2)博途中的组态V90 图例如下:1、创建S7-300图5 2、查找对应版本的GSD图6 3、分配IP地址图7 4、选择西门子报文111图84.FB284功能块如下:图95.常见问题及解决办法(1)常见问题1、无所选设备型号2、无法在线检测3、无法选择E-POS控制模式(2)解决办法1、如果找不到所选设备型号是因为伺服软件V-ASSI版本过低,请更新到1.052、如果无法在线检测则把系统改为WIN-7版本,驱动不支持WIN-8及以上的系统。
epos的111报文解析
EPOS的111报文是带扩展功能定位运行报文,常用于EPOS的控制。
以下是关于111报文的解析:
报文数据格式:111报文由12个接受/发送字组成,每个控制/状态字的含义不同。
具体的报文数据格式可以查阅相关的技术文档或手册。
EPOS功能与111报文的对应关系:EPOS的几种运行模式就是通过对111报文的IO读写实现的。
具体的对应关系可以参考相关的技术手册或文档。
报文控制字和状态字的详细描述:控制字和状态字是111报文中的重要组成部分,它们的详细描述和含义可以参考相关的技术手册或文档。
EPOS各功能配合111报文的具体实现:具体的实现方式可以参考相关的技术手册或文档,了解如何通过操作111报文实现EPOS的各种功能。
总之,要深入理解并掌握EPOS的111报文,需要具备一定的技术背景和基础知识,同时还需要查阅相关的技术文档或手册,进行实践和探索。
如有更深入的需求,建议咨询专业技术人员或厂家。
西门子111报文详细
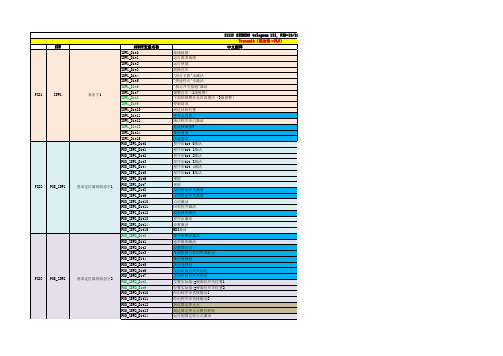
SCOUT变量名称 STW1_Bit0 STW1_Bit1 STW1_Bit2 STW1_Bit3 STW1_Bit4 STW1_Bit5 STW1_Bit6 STW1_Bit7
[111] SIEMENS telegram 111, PZD-12/12 Receive(PLC→驱动器)
中文 轴的运行命令/变频器启动 "无滑行下降"命令 "无快速停止"命令 运行使能(脉冲使能与封锁) 停止任务 1:不激活 0:激活 停止命令 1:不激活 0:激活 激活程序步任务 故障确认
运行命令激活 驱动数据设置bit 0有效 驱动数据设置bit 1有效 驱动数据设置bit 2有效 驱动数据设置bit 3有效 驱动数据设置bit 4有效 报警分类bit 0 报警分类bit 1 轴停车命令激活 运行到固定点停止激活 预留 脉冲使能 电动机转换激活 从站时钟同步bit 0 从站时钟同步bit 1 从站时钟同步bit 2 从站时钟同步bit 3 斜坡上升/斜坡下降完成 转矩利用 < 转矩极限值 |n_act| < 速率极限值3 |n_act| < 速率极限值2 p2155 电压-数字变换器控制器激活 信号发生器输出信号 超温报警 电源单元热过载报警 速度实际运行值偏差在“t_on”公差内 预留 预留 控制器使能 驱动器准备好 脉冲使能 预留 预留 位置实际值 速度实际值 故障代码 警告代码
点动1命令 点动2命令 通过PLC控制驱动器 启动回参考点命令 预留 外部块变化 预留 预留 选择程序步 bit0 选择程序步 bit1 选择程序步 bit2 选择程序步 bit3 选择程序步 bit4 选择程序步 bit5 预留 预留 直接数据输入/MDI_定位模式 1:绝对位置 0:相对位置 直接数据输入/MDI_方向选择 正向 直接数据输入/MDI_方向选择 反向 预留 直接数据输入/MDI_数据传输方式 1:连续 0:单步 预留 直接数据输入/MDI_设置选择 1:速度模式 0:位置模式 直接数据输入/MDI_选择(激活MDI功能) 激活程序步模式 激活轴的“设置参考点”命令,将当前位置设置成零位。 参考点挡块信号 预留 预留 设置点动模式 0:速度模式 1:位置模式 预留 预留 选择回参考点方式 0:主动回零 1:被动回零 设置寻参考点方向 0:正向回零 1:反向回零 选择测量探头的评估,闭环位置控制 测量探头评价优势,闭环位置控制 预留 预留 激活软限位 激活硬限位 驱动数据设置 bit 0 驱动数据设置 bit 1 驱动数据设置 bit 2 驱动数据设置 bit 3 驱动数据设置 bit 4 预留 预留 轴停车命令 预留 预留
V90在EPOS模式下的回零操作验证修订版

/CN/view/zh/ 109749068C o p y r i g h t ãS i e m e n s A G C o p y r i g h t y e a r A l l r i g h t s r e s e r v e d 目录 1 V90驱动器连接增量编码器伺服电机的主动回零 (3)1.1通过参考点挡块(回零开关)及编码器零脉冲回零,P29240=1 (3)1.2仅编码器零脉冲,P29240=2 (3)2 V90驱动器连接绝对值编码器伺服电机的回零 (3)2.1通过V-ASSISTANT 软件设置 (4)2.2通过BOP 面板 (4)2.3通过FB287(SINA_PARA)程序块编程的方式 (5)3直接设置参考点 (5)C o p y r i g h t ãS i e m e n s A G C o p y r i g h t y e a r A l l r i g h t s r e s e r v e d 1 V90驱动器连接增量编码器伺服电机的主动回零V90 PN 与PLC 间通过PROFINET 连接,使用标准西门子111报文,PLC 控制V90 PN 时使用FB284(SINA_POS)功能块,主动回零有以下2种方式:1.1通过参考点挡块(回零开关)及编码器零脉冲回零,P29240=1回零编程步骤如下:(1) 设置FB284工作模式: ModePos=4(2) 将参考点挡块输入信号(回零开关)连接到功能块管脚ConfigEPos bit 6(3) 设置EnableAxis=1使能轴(4) 设置ExecuteMode=1执行回参考点运行,此时轴开始回零运行回零运行过程:轴加速到速度p2605 搜索参考点挡块。
当到达参考点挡块时(Pos_STW2.2:0→1),伺服电机减速到静止状态。
此时,轴开始反向加速到速度p2608,当离开参考点挡块后(Pos_STW2.2:1→0),搜索编码器的零脉冲,当遇到编码器第一个零脉冲,轴反向加速以速度p2611 运行偏移距离 p2600 后停止在参考点,并将p2599设置成参考点的位置值,V90数字量输出信号 REFOK =1。
S7-1200调试V90伺服

常问问题 11/2016S7-1200通过FB284实现V90PN的EPOS控制S7-1200、V90PN、FB284、EPOShttps:///cs/cn/zh/view/109742969C o p y r i g h t S i e m e n s A G C o p y r i g h t y e a r A l l r i g h t s r e s e r v e d目录1 概述.................................................................................................................. 32 SINA_POS(FB284)功能块管脚介绍 .................................................................. 4 3SINA_POS 功能块的功能实现 .......................................................................... 7 3.1 概述 ................................................................................................... 7 3.2 SINA_POS(FB284)运行模式 .............................................................. 8 3.2.1 运行条件 ............................................................................................ 8 3.2.2 绝对定位运行模式 .............................................................................. 8 3.2.3 相对定位运行模式 .............................................................................. 9 3.2.4 连续运行模式(Setup mode) .............................................................. 10 3.2.5 回零 ................................................................................................. 11 3.2.6 设置零点位置 ................................................................................... 12 3.2.7 运行程序块 ...................................................................................... 12 3.2.8 点动(Jog) ......................................................................................... 13 3.2.9 点动增量(Jog) .................................................................................. 14 3.2.10 基于ModePos 值的运行模式切换说明 (15)4项目配置......................................................................................................... 15 4.1 使用的软、硬件 ............................................................................... 15 4.2 S7-1200项目配置步骤 ...................................................................... 15 4.3 V90 PN 项目配置步骤 (21)C o p y r i g h t S i e m e n s A G C o p y r i g h t y e a r A l l r i g h t s r e s e r v e d1 概述S7-1200可以通过PROFINET 通讯连接SINMICS V90伺服驱动器,将V90驱动器的控制模式设置为“基本位置控制(EPOS)”,PLC 通过111报文及TIA Portal 提供的驱动库中的功能块FB284可实现V90的EPOS 基本定位控制,控制系统连接如图1-1所示。
西门子V90伺服的挡块控制模式
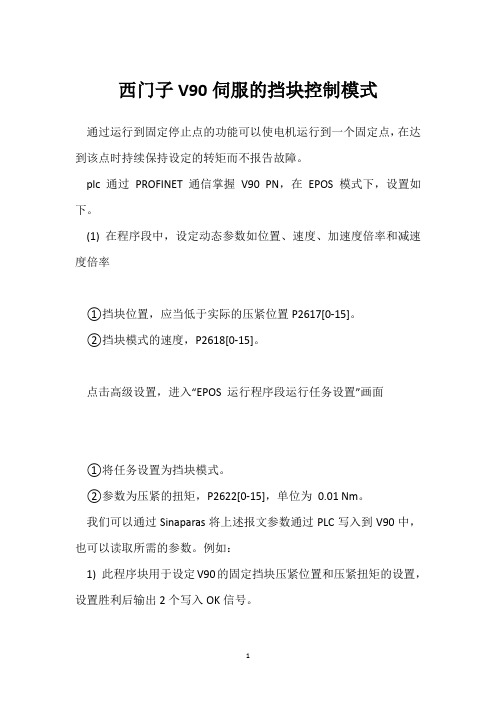
西门子V90伺服的挡块控制模式通过运行到固定停止点的功能可以使电机运行到一个固定点,在达到该点时持续保持设定的转矩而不报告故障。
plc 通过PROFINET 通信掌握V90 PN,在EPOS 模式下,设置如下。
(1) 在程序段中,设定动态参数如位置、速度、加速度倍率和减速度倍率①挡块位置,应当低于实际的压紧位置P2617[0-15]。
②挡块模式的速度,P2618[0-15]。
点击高级设置,进入“EPOS 运行程序段运行任务设置”画面①将任务设置为挡块模式。
②参数为压紧的扭矩,P2622[0-15],单位为0.01 Nm。
我们可以通过Sinaparas将上述报文参数通过PLC写入到V90中,也可以读取所需的参数。
例如:1) 此程序块用于设定V90的固定挡块压紧位置和压紧扭矩的设置,设置胜利后输出2个写入OK信号。
2)块内容如下:首先读取一下伺服的实际扭矩,扭矩参数为R31。
3)然后写入固定挡块位置和固定挡块扭矩:当V90的参数为一个参数多个数组时如P2622[0-15],想要输入P2622的2号值P2622[2],则Parameter为参数值设置为P2622,Index 参数的位值设置为2,代表给参数p2622[2]输入值。
4)现将挡块扭矩的设定值写入到P2622设定值中。
5)力矩参数P2622写入0.5秒后,接通P2622的参数读取,查看是否胜利写入。
6)读取V90中的固定挡块扭矩参数P2622:7)挡块模式的固定挡块位置写入P2617:8)力矩参数P2617写入0.5秒后,接通P2617的参数读取,查看是否胜利写入。
9)读取V90中的固定挡块位置P2617参数:10)当实际转矩值到达P2622 中设置扭矩限制值且实际位置跟随误差超出了参数p2634 中设置的值时,说明已到达固定停止点,假如V90 使用111 报文则状态字POS_ZSW2.12 置1。
11)将FB284的模式设定为6,Position设定为0。
V90 Epos回零整理

V90在Epos模式下的回零操作整理(修订)1.V90 驱动器连接增量编码器伺服电机的主动回零V90 PN 与 PLC 间通过PROFINET 连接,使用标准西门子 111 报文,PLC 控制 V90 PN时使用 FB284(SINA_POS)功能块,主动回零有以下2种方式:1.1 通过参考点挡块(回零开关)及编码器零脉冲回零,P29240=1回零编程步骤如下:(1) 设置 FB284 工作模式: ModePos=4(2) 将参考点挡块输入信号(回零开关)连接到功能块管脚ConfigEPos bit 6(3) 设置 EnableAxis=1 使能轴(4) 设置 ExecuteMode=1 执行回参考点运行,此时轴开始回零运行回零运行过程:轴加速到速度p2605 搜索参考点挡块。
当到达参考点挡块时(Pos_STW2.2:0→1),伺服电机减速到静止状态。
此时,轴开始反向加速到速度 p2608,当离开参考点挡块后(Pos_STW2.2:1→0),搜索编码器的零脉冲,当遇到编码器第一个零脉冲,轴反向加速以速度 p2611 运行偏移距离 p2600 后停止在参考点,并将 p2599设置成参考点的位置值,V90数字量输出信号 REFOK =1。
回参考点完成后功能块管脚 AxisRef 状态变为1。
1.2 仅编码器零脉冲,P29240=2回零编程步骤如下:(1) 设置 FB284 工作模式: ModePos=4(2) 设置 EnableAxis=1 使能轴(3) 设置 ExecuteMode=1 执行回参考点运行,此时轴开始回零运行回零运行过程:轴按照 P2604 定义的搜索方向,以最大加速度P2572加速至搜索速度P2608 搜索编码器的零脉冲,搜索到零脉冲后,轴以速度P2611 运行偏移距离 p2600 后停止在参考点,并将p2599 设置成参考点的位置值,V90 数字量输出信号REFOK =1。
回参考点完成后 AxisRef 状态变为 1 。
1500与V90通信控制

1500与V90通信控制位置模式注意:GSD和库的安装,打开样例程序即可自动安装,若不能正常安装请按以下步骤插入GSD包,在“选项”——选择“管理通用站描述文件”把控制指令库放到TIA的Lib-Sys里面,然后重启TIA就可以在“全局库”里找到。
1、在TIA组态V90PN硬件在“网络视图”中,右边的“硬件目录”中选择“其他现场设备-Drives-SIEMENSAG-SINAMIS",下拉找到V90硬件,拖拽到左边。
左键按住绿色网口图标,移动到对应设备进行网络连接在网络视图中双击V90PN图标,配置V90PN的报文,位置控制选择111报文。
左键选中V90PN设备,在“属性”栏,命名设备的名称,要和V90驱动的名称一致驱动的控制模式选择“基本定位器控制”驱动报文选择“111报文”斜坡函数发生器选择“生效”调用SINA_POS对轴进行位置控制,在全局库中选择,打开右边“库”,选择“全局库”SINA_POS指令说明,注意该指令必须使用“111报文”ModePos: 控制模式选择1、相对定位2、绝对定位5、直接设定零点6、主动回原点7、点动模式Off1:轴使能,RejTrvTsk,IntMStop默认,AckFlt故障复位,Execute启动定位(上升沿),Position设置定位距离(LU),Velocity定位时的速度(LU/min),OverV设定速度百分比输出,OverAcc设定加速度百分比输出,OverDec设定减速度百分比输出,LAddrSP和LAddrAV报文地址,VeloAct实际速度,PosAct实际位置(LU)例:实际设定速度=Velocity*OverV%注意:点动的速度在驱动里面设定,也可以通过调用SINA_PARA_S修改,VeloAct选择Lreal数据类型,防止数据溢出。
Velocity的设定值和驱动的单圈对应长度(LU)有关,默认设定是10000LU。
实际速度=NIST_B*P2000/40000000H(1073741824)实际转矩=PZD12*P2003/4000H(16384)Velocity=目标轴转速*单圈LU/1000实际转速=VeloAct*额定转速/1073741824实际位置=PosAct/单圈LU注释:P2000为额定转速,P2003为额定转矩例子:想设定轴转速为300r/min,单圈LU=10000,则Velocity=300*10000/1000。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
V90伺服111报文插
入及使用
西门子V90伺服111报文
的插入及使用
软件版本:TIA V14 SP1 Professional
1、在硬件目录依次找到“其他现场设备”、“PROFINET IO”、“Drives”、“SIEMENS AG”、“SINAMICS”
2、在“SINAMICS”中最后一个设备可以看到V90伺服,将其拖入网络视图中,如下图所示
3、进入伺服设备视图,选择“以太网址”,设置“子网”和“IP地址”
4、子网设置好,回到网络视图,点击伺服上的“未分配”,可以看见跳出两个选择,点击“PLC_1.PROFINET借口_1”
5、选择好后,就将该伺服控制器与PLC_1连接起来了,完成效果如下图所示,下面还需将该伺服组态与伺服控制指令块匹配
6、回到伺服设备视图,向左拉出右侧设备概览图,从右侧的子模块里选取“西门子报文111,PZD-12/12”,拖到伺服的设备概览图
7、报文拖进以后,查看报文属性,选择“硬件标识符”,可以看到该报文标识符为“280”,下面需要用到此标识符
8、在程序段里,插入FB284-“SINA_POS”伺服控制指令,该指令可以从右侧全局库里的“Drive_Lib_S7_1200_1500”,“主模板”,“03_SINAMCS”中找到
9、为了将该FB284指令块与上面的伺服设备匹配,将HWIDSTW,HWIDZSW 设为报文标识符280。