空间桁架结构程序设计(Fortran)
维斯塔斯矩形钢管空间桁架连廊结构设计(全文)

维斯塔斯矩形钢管空间桁架连廊结构设计(全文)范本一:正文:一、引言维斯塔斯矩形钢管空间桁架连廊结构设计主要目的是为了满足建筑物中连廊结构的承重和抗震需求。
本文将详细介绍该结构的设计思路、参数计算、构件选择、荷载分析等内容。
二、设计思路该连廊结构采用矩形钢管空间桁架作为主要承重结构,以满足建筑物连廊的跨度要求。
设计思路主要包括结构形式的选择、受力分析和稳定性分析。
2.1 结构形式选择在连廊结构的设计中,考虑到跨度较大,矩形钢管空间桁架结构能够在保证结构稳定性的同时满足承重要求。
因此选择矩形钢管空间桁架结构作为主要承重结构。
2.2 受力分析在受力分析中,首先需要计算连廊结构的自重荷载。
然后考虑到连廊上可能发生的活载荷载和风荷载,进行荷载分析。
最后结合连廊的抗震设计,确定连廊结构的主要受力情况。
2.3 稳定性分析稳定性分析是为了保证连廊结构在使用过程中不发生倾覆或失稳。
需要考虑到连廊结构的刚度,通过横向稳定分析和纵向稳定分析,确定连廊结构的稳定性。
三、参数计算参数计算是在设计中必不可少的环节,包括截面尺寸、材料强度、构件节点的设计等。
3.1 截面尺寸根据连廊的跨度和荷载情况,计算连廊结构所需的最大截面尺寸。
一般情况下,矩形钢管的高度和宽度需要满足一定的宽高比要求,以保证结构的稳定性。
3.2 材料强度在材料的选择中,需要考虑到矩形钢管的强度、刚度和耐久性等。
通过计算材料的抗弯强度、抗压强度和抗拉强度,确定矩形钢管的材料强度。
3.3 构件节点设计构件节点的设计是确保连廊结构的节点连接紧固可靠、不发生脱开或错位的重要环节。
通过合理的节点设计,保证矩形钢管的连接稳定性。
四、荷载分析荷载分析是为了确定连廊结构的最大受力情况,包括自重荷载、活载荷载和风荷载。
4.1 自重荷载自重荷载主要考虑连廊结构本身的重量。
根据材料的密度和结构的截面尺寸,计算出连廊结构的自重荷载。
4.2 活载荷载活载荷载主要考虑连廊上可能承载的人员和设备等活动荷载。
空间管桁架结构设计

空间管桁架结构设计王芬;周云平【摘要】空间管桁架作为一种新型的空间结构体系,具有刚度大、用钢量小、施工方便、经济环保性能优等特点,广泛应用于大型输变电站、体育馆、车站等大跨空间结构中。
通过对管桁架结构布置、稳定性和抗震性能的分析,讨论结构外观体型布置对大跨度结构内力及变形的影响,为同类结构设计提供参考和借鉴。
%As a new spatial structure system,the structure of the spatial tube truss has the features of great rigidity,small in amount of steel,convenient for constructing,economical and environmental in performance and therefore it is widely used in substations,stadiums and railway stations. Based on an analysis of the structural arrangement,stability and seismic performance the tube truss,this paper discusses the effects of the outer structural arrangement on the internal forces and deformations of the large-span structure in a bid to provide useful reference for the design of similar structures.【期刊名称】《电网与清洁能源》【年(卷),期】2015(000)007【总页数】5页(P123-127)【关键词】空间管桁架;结构布置;稳定性能;抗震性能;SAP2000设计【作者】王芬;周云平【作者单位】中煤西安设计工程有限责任公司,陕西西安 710054;西安理工大学土木建筑工程学院,陕西西安 710048【正文语种】中文【中图分类】TU323.4工程主体为钢筋混凝土结构,屋盖为空间管桁架结构,桁架采用稳定性比较好的倒三角形结构体系。
桁架结构设计

FN2 =3.33FP
FN3 =-0.50FP
截面单杆 截面法取出的隔离体,不管其上 有几个轴力,如果某杆的轴力可以通过列一 个平衡方程求得,则此杆称为截面单杆。 可能的截面单杆通常有相交型和平行型两种 形式。
小结: 熟练掌握 计算桁架内力的基 本方法: 结点法和截面法 采取最简捷的途径计算桁架内力 能够分析和计算组合结构的内力 尤其注意区分二力杆和非二力杆
2.5.2 桁架结构的分类:
一、根据维数分类 1. 平面(二维)桁架(plane truss) ——所有组成桁架的杆件以及荷载的作 用线都在同一平面内
2. 空间(三维)桁架(space truss) ——组成桁架的杆件不都在同一平面内
二、按外型分类 1. 平行弦桁架 2. 三角形桁架
3. 抛物线桁架
FN=0
FN1=0
判断结构中的零杆
FP FP FP/2
FP/ 2
FP
2.5.3
结点法(nodal analysis method)
以只有一个结点的隔离体为研究对象,用 汇交力系的平衡方程求解各杆的内力的方法 例1. 求以下桁架各杆的内力
0
-33 34.8 19 19
YNAD CD 0.5 X NAD AC 1.5
Y
S
α
X L Ly
α
S
Lx
S X Y L Lx Ly
2. 结点单杆 以结点为平衡对象能仅用一个方程 求出内力的杆件,称为结点单杆(nodal single bar)。 利用这个概念,根据荷载状况可判断此杆内力是 否为零。 3. 零杆 零内力杆简称零杆(zero bar)。
FN2=0
FN=0
0
-33 34.8 19 -8
空间桁架设计方法
空间桁架设计方法摘要:本文将空间桁架设计方法引入到钢结构胶带机通廊的结构设计工作中,较为真实的反映了钢结构通廊的空间工作状态,为今后进行钢结构胶带机通廊的结构设计起到了一定的指导作用。
关键词:胶带机通廊;钢结构;空间桁架;结构设计Abstract: In this paper, the space truss design method is introduced to the steel structure conveyor gallery structure design work, it is a true reflection of the steel structure gallery space working condition, for future steel conveyor gallery structure design can play a guiding role.Key words: conveyor Gallery; steel structure; space truss; structure design1.引言胶带机由于具有运送散粒物料输送量大、可实现连续供料等优点,现在已经逐渐成为冶金行业运送各种散粒物料的主要设施。
随着冶金企业规模的扩大,冶金厂区建(构)筑物日益密集,加之生产工艺日趋复杂,胶带机通廊正向着大跨、超高、重载的方向发展。
而钢结构则以其轻质高强、跨度大(跨度60m左右的胶带机通廊在冶金行业的上料系统已经很常见【文献1】)、施工周期短等优点逐渐成为胶带机通廊设计的首选结构形式。
钢结构胶带机通廊主体部分由两侧承重主桁架、主桁架上弦支撑(垂直支撑和斜向支撑)、主桁架下弦支撑(垂直支撑和斜向支撑)组成,主桁架上弦支撑、主桁架下弦支撑通过节点板或螺栓将两侧承重主桁架连接成整体的空间桁架结构。
以笔者所在单位为例,钢结构胶带机通廊主体部分在结构设计阶段,空间桁架整体结构分析时将空间桁架简化为平面桁架进行内力分析:两侧承重主桁架采用PKPM系列结构分析软件中STS钢结构桁架进行建模分析;主桁架上弦支撑、主桁架下弦支撑中的垂直支撑由于分别承担屋面檩条和胶带机支腿荷载(图1),依据【文献2】按压弯构件进行复核;主桁架上弦支撑、主桁架下弦支撑中的斜向支撑依据【文献2】按拉、压杆进行复核,综合考虑构造要求进行设计。
桁架有限元程序流程(有限元课程设计)
有限单元法课程设计有限单元法是基于连续介质力学基础上发展起来的,目前使用最广泛的数值计算方法。
有限单元法解决问题的前提是各单元相邻边界的位移协调。
有限单元法解决问题的前提是各单元相邻边界的位移协调。
有限单元有限单元法将连续的求解域离散为一组有限个单元组成的组合体,由细分单元去逼近求解域,由于单元的不同连接方式和形式各异的单元形状由于单元的不同连接方式和形式各异的单元形状,,因此可以适应几何形状复杂的求解区域杂的求解区域;;第二第二,,利用每一个单元内的近似函数利用每一个单元内的近似函数((形函数形函数))来表示全求解域上待求的未知场函数待求的未知场函数,,把一个连续的无限自由度问题变成离散的有限自由度问题,只要求出单元结点的物理量只要求出单元结点的物理量,,就可以确定单元组合体上的其他未知场函数就可以确定单元组合体上的其他未知场函数,,如果选择合适的形函数选择合适的形函数,,随着网格密度的减小随着网格密度的减小,,近似解将逐步趋向精确解近似解将逐步趋向精确解;;第三第三,,有限单元法计算得到的总体刚度矩阵为稀疏带状矩阵,这样借助于电子计算机存储和计算的效率大大提高计算的效率大大提高,,便于处理大规模问题。
便于处理大规模问题。
从上述有限单元法的特性可知从上述有限单元法的特性可知,,其计算原理简单其计算原理简单,,但由于单元连接方式和单元形状的多元化元形状的多元化,,以及近似函数的选择合适与否以及近似函数的选择合适与否,,使得有限元法在针对具体问题求解时比较烦琐求解时比较烦琐,,正是基于这样的应用背景正是基于这样的应用背景,,本论文提出了一种更简单实用的单元模型—平面等效桁架单元模型。
最后最后,,编制有限元分析程序编制有限元分析程序,,将这种桁架单元模型运用于钢筋混凝土结构中型运用于钢筋混凝土结构中,,模型中混凝土采用等效桁架单元模型中混凝土采用等效桁架单元,,钢筋采用一维杆单元单元,,利用混凝土等效的应力应变关系对各种构件进行弹塑性分析,并试探性的提出了单元破坏准则。
(完整word版)空间桁架结构程序设计(Fortran)
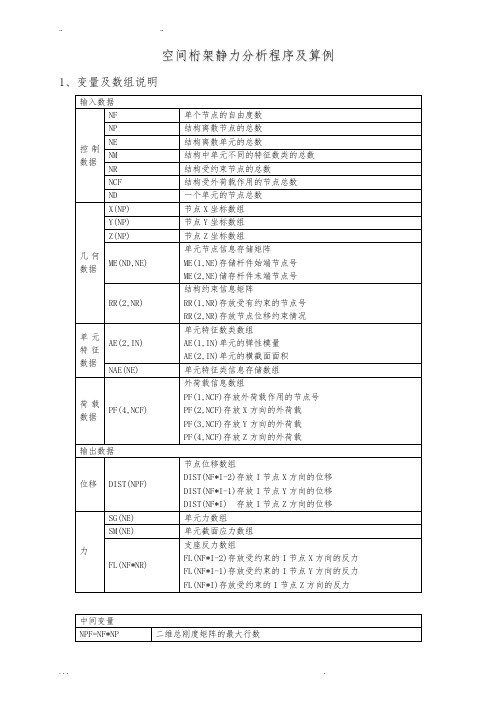
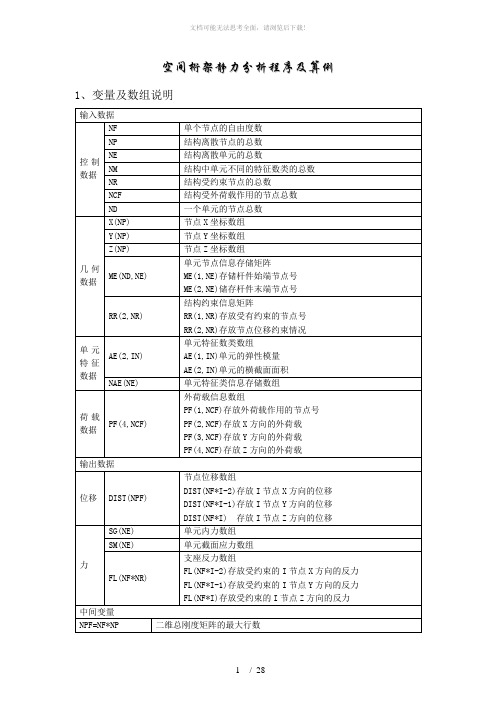
空间桁架静力分析程序及算例1、变量及数组说明2、空间桁架结构有限元分析程序源代码!主程序(读入文件,调用总计算程序,输出结果)CHARACTER IDFUT*20,OUTFUT*20WRITE(*,*) 'Input Data File name:'READ (*,*)IDFUTOPEN (11,FILE=IDFUT,STATUS='OLD')WRITE(*,*) 'Output File name:'READ (*,*)OUTFUTOPEN(12,FILE=OUTFUT,STATUS='UNKNOWN')WRITE(12,*)'*****************************************'WRITE(12,*)'* Program for Analysis of Space Trusses *'WRITE(12,*)'* School of Civil Engineering CSU *'WRITE(12,*)'* 2012.6.25 Designed By MuZhaoxiang *'WRITE(12,*)'*****************************************'WRITE(12,*)' 'WRITE(12,*)'*****************************************'WRITE(12,*)'*************The Input Data****************'WRITE(12,*)'*****************************************'WRITE(12,100)READ(11,*)NF,NP,NE,NM,NR,NCF,NDWRITE(12,110)NF,NP,NE,NM,NR,NCF,ND100 FORMAT(6X,'The General Information'/2X,'NF',5X,'NP',5X,'NE',5X,'NM',5X,'NR',& 5X,'NCF',5X,'ND')110 FORMAT(2X,I2,6I7)NPF=NF*NPNDF=ND*NFCALL ANALYSE(NF,NP,NE,NM,NR,NCF,ND,NPF,NDF)END!********************************************************************!总计算程序SUBROUTINE ANALYSE(NF,NP,NE,NM,NR,NCF,ND,NPF,NDF)DIMENSION X(NP),Y(NP),Z(NP),MM(NE),ME(ND,NE),IT(NF,NP),RR(ND,NR), NAE(NE),&AE(1,2),PF(4,NCF),LMT(NDF,NE),MAXA(NPF),CKK(1000),V(NPF),DIST(NPF),&PP(NPF),FF(NPF),SG(NE),SM(NE)READ(11,*)(X(I),Y(I),Z(I),I=1,NP)READ(11,*)(MM(I),ME(1,I),ME(2,I),NAE(I),I=1,NE)READ(11,*)(RR(1,J),RR(2,J),J=1,NR)READ(11,*)(AE(1,J),J=1,2)WRITE(12,120)WRITE(12,121)(I,X(I),Y(I),Z(I),I=1,NP)WRITE(12,130)WRITE(12,131)(MM(I),ME(1,I),ME(2,I),NAE(I),I=1,NE)WRITE(12,140)WRITE(12,141)(INT(RR(1,J)),RR(2,J),J=1,NR)WRITE(12,150)WRITE(12,151)(AE(1,J),J=1,2)IF(NCF/=0)THENREAD(11,*)((PF(I,J),I=1,4),J=1,NCF)WRITE(12,160)WRITE(12,161)(INT(PF(1,J)),PF(2,J),PF(3,J),PF(4,J),J=1,NCF)ENDIF120 FORMAT(/6X,'The Information of Joints'/2x,'Joint',5X,'X',5X,'Y',5X,'Z')121 FORMAT(1X,I4,3F8.1)130 FORMAT(/6X,'The Information of Members'/2x,'Member',2X,'START',4X,'END',6X,'NAE')131 FORMAT(1X,I4,3I8)140 FORMAT(/6X,'The Information of SUPPORTS'/2x,'Joint',5X,'S')141 FORMAT(1X,I4,F8.3)150 FORMAT(/6X,'The Information of Sections'/4x,'E0',8X,'A0')151 FORMAT(1X,1PE8.2,F8.4)160 FORMAT(/6X,'The Loading at Joints'/2x,'Joint',5X,'FX',5X,'FY',7X,'FZ')161 FORMAT(1X,I4,3F8.2)CALL FLMT(NP,NE,NN,NNM,NR,RR,ND,NF,NDF,ME,IT,LMT)CALL FMAXA(NNM,NE,LMT,MAXA,NWK,NPF,NDF)CALL LP(V,PP,IT,PF,NN,NCF,NF,NP,NPF)CALL CONKB(NP,NE,NM,NWK,ME,X,Y,Z,AE,NAE,LMT,MAXA,CKK,NNM)ISH=1CALL LDLT(CKK,MAXA,NN,ISH,IOUT,NWK,NNM)CALL REBACK(CKK,V,MAXA,NN,NWK,NNM)CALL DISPLS(NP,NE,NPF,NM,NN,IT,V,DIST,AE,NAE,X,Y,Z,PP,FF,SG,SM,ME,NR,RR,NF)END!********************************************************************!矩阵转置子程序SUBROUTINE MAT(M,N,A,B)DIMENSION A(M,N),B(N,M)DO I=1,MDO J=1,NB(J,I)=A(I,J)END DOEND DORETURNEND!单元刚度矩阵的形成SUBROUTINE FKE(NP,NE,NM,IE,X,Y,Z,ME,NAE,AE,AKE)DIMENSION X(NP),Y(NP),Z(NP),ME(2,NE),NAE(NE),AE(2,NM) ,AKE(2,2) N1=ME(1,IE)N2=ME(2,IE)X1=X(N1);Y1=Y(N1);Z1=Z(N1)X2=X(N2);Y2=Y(N2);Z2=Z(N2)BL=SQRT((X2-X1)**2+(Y2-Y1)**2+(Z2-Z1)**2)NMI=NAE(IE)E0=AE(1,NMI);A0=AE(2,NMI)C=E0*A0/BLAKE(1,1)=CAKE(1,2)=-CAKE(2,1)=-CAKE(2,2)=CRETURNEND!单元坐标转换矩阵SUBROUTINE FT(IE,NP,NE,X,Y,Z,ME,T)DIMENSION X(NP),Y(NP),Z(NP),ME(2,NE),T(2,6)T=0N1=ME(1,IE);N2=ME(2,IE)X1=X(N1);Y1=Y(N1);Z1=Z(N1)X2=X(N2);Y2=Y(N2);Z2=Z(N2)BL=SQRT((X2-X1)**2+(Y2-Y1)**2+(Z2-Z1)**2)CX=(X2-X1)/BLCY=(Y2-Y1)/BLCZ=(Z2-Z1)/BLT(1,1)=CX;T(2,4)=CXT(1,2)=CY;T(2,5)=CYT(1,3)=CZ;T(2,6)=CZRETURNEND!生成单元联系数组LMTSUBROUTINE FLMT(NP,NE,NN,NNM,NR,RR,ND,NF,NDF,ME,IT,LMT)DIMENSION IT(NF,NP),LMT(NDF,NE),ME(ND,NE),RR(2,NR)NN=0;NNM=0;IT=0;LMT=0N=0DO I=1,NPC=0DO K=1,NRKR=RR(1,K)IF(KR.EQ.I) C=RR(2,K)ENDDONC=C !NC=0,提取了整数部分C=C-NC !C=0.***,例如C=0.111DO J=1,NFC=C*10.0 !例如C=1.21L=C+0.1 !提取C整数部分,例如L=1,即提取了约束RR(2,K)十分位 !上的数字,这里"+0.1"是为了防止四舍五入是出现错误 C=C-LIF(L.EQ.0)THENN=N+1IT(J,I)=NELSEIT(J,I)=0ENDIFENDDOENDDONN=NNNM=NN+1DO IE=1,NEDO I=1,NDNI=ME(I,IE)DO J=1,NFLMT((I-1)*NF+J,IE)=IT(J,NI)ENDDOENDDOENDDORETURNEND!二维总刚中对角线元地址数组SUBROUTINE FMAXA(NNM,NE,LMT,MAXA,NWK,NPF,NDF)DIMENSION MAXA(NPF),LMT(NDF,NE)MAXA=0;NWK=0MAXA(1)=1DO I=2,NNMIP=I-1IG=IPDO IE=1,NEDO J=1,NDFIF(LMT(J,IE).EQ.IP) THENDO K=1,NDFIF(LMT(K,IE).GT.0.AND.LMT(K,IE).LE.IG) IG=LMT(K,IE)ENDDOEND IFENDDOENDDOMAXA(I)= MAXA(I-1)+IP-IG+1ENDDONWK= MAXA(NNM)-1RETURNEND!生成一维存储结构总刚度矩阵SUBROUTINE CONKB(NP,NE,NM,NWK,ME,X,Y,Z,AE,NAE,LMT,MAXA,CKK,NNM)DIMENSION CKK(NWK),X(NP),Y(NP),Z(NP),AE(2,NM),NAE(NE),LMT(6,NE),ME(2,NE),& MAXA(NNM),AK(6,2),AKE(2,2),T(2,6),TT(6,2),TAK(6,6)CKK=0DO 10 IE=1,NETAK=0CALL FKE(NP,NE,NM,IE,X,Y,Z,ME,NAE,AE,AKE)CALL FT(IE,NP,NE,X,Y,Z,ME,T)CALL MAT(2,6,T,TT)AK=MATMUL(TT,AKE)TAK=MATMUL(AK,T) !总体坐标系下的单元刚度矩阵DO 220 I=1,6DO 220 J=1,6NI=LMT(I,IE)NJ=LMT(J,IE)IF((NJ-NI).GE.0.AND.NI*NJ.GT.0) THENIJ=MAXA(NJ)+NJ-NICKK(IJ)=CKK(IJ)+TAK(I,J)ENDIF220 CONTINUE10 CONTINUERETURNEND!生成荷载矩阵SUBROUTINE LP(V,PP,IT,PF,NN,NCF,NF,NP,NPF)DIMENSION V(NN),PP(NPF),IT(NF,NP),PF(4,NCF)V=0PP=0DO I=1,NFDO J=1,NPDO K=1,NCFIF(J.EQ.PF(1,K).AND.IT(I,J).NE.0)THENV(IT(I,J))=PF(I+1,K)ENDIFENDDOENDDOENDDODO K=1,NCFDO I=1,NPIF(I.EQ.PF(1,K))THENPP(NF*(I-1)+1)=PF(2,K)PP(NF*(I-1)+2)=PF(3,K)PP(NF*(I-1)+3)=PF(4,K)ENDIFENDDOENDDORETURNEND!对一维结构总刚度矩阵进行矩阵分解(LDLT)SUBROUTINE LDLT(A,MAXA,NN,ISH,IOUT,NWK,NNM) DIMENSION A(NWK),MAXA(NNM)IF(NN.EQ.1) RETURNDO 200 N=1,NNKN=MAXA(N)KL=KN+1KU=MAXA(N+1)-1KH=KU-KLIF(KH)304,240,210210 K=N-KHIC=0KLT=KUDO 260 J=1,KHKLT=KLT-1IC=IC+1KI=MAXA(K)ND=MAXA(K+1)-KI-1IF(ND) 260,260,270270 KK=MIN0(IC,ND)C=0.0DO 280 L=1,KK280 C=C+A(KI+L)*A(KLT+L)A(KLT)=A(KLT)-C260 K=K+1240 K=NB=0.0DO 300 KK=KL,KUK=K-1KI=MAXA(K)C=A(KK)/A(KI)IF(ABS(C).LT.1.0E+07) GOTO 290WRITE(IOUT,2010) N,CSTOP290 B=B+C*A(KK)300 A(KK)=CA(KN)=A(KN)-B304 IF(A(KN)) 310,310,200310 IF(ISH.EQ.0) GOTO 320IF(A(KN).EQ.0.0) A(KN)=-1.0E-16GOTO 200320 WRITE(IOUT,2000) N,A(KN)STOP200 CONTINUERETURN2000 FORMAT(//,' Stop-stiffness matrix not positive definite',//,'no positive& pivot for equation',I4,&//,' pivot =',E20.10)2010 FORMAT(//,' Stop-strum sequence check failed + because of multiplier& growth for column &number',I4,//,' Multiplier = ',E20.8)END!回代,求得节点位移SUBROUTINE REBACK(A,V,MAXA,NN,NWK,NNM)DIMENSION A(NWK),V(NN,1),MAXA(NNM)NIP=1DO IP=1,NIPDO 400 N=1,NNKL=MAXA(N)+1KU=MAXA(N+1)-1IF(KU-KL) 400,410,410410 K=NC=0.0DO 420 KK=KL,KUK=K-1420 C=C+A(KK)*V(K,IP)V(N,IP)=V(N,IP)-C400 CONTINUEDO 480 N=1,NNK=MAXA(N)480 V(N,IP)=V(N,IP)/A(K)IF(NN.EQ.1)RETURNN=NNDO 500 L=2,NNKL=MAXA(N)+1KU=MAXA(N+1)-1IF(KU-KL) 500,510,510510 K=NDO 520 KK=KL,KUK=K-1520 V(K,IP)=V(K,IP)-A(KK)*V(N,IP)500 N=N-1ENDDORETURNEND!求解杆件内力、支反力和位移SUBROUTINE DISPLS(NP,NE,NPF,NM,NN,IT,FTOOL,DIST,AE,NAE,X,Y, Z,PP,FF,SG,SM,ME,& NR,RR,NF)DIMENSION IT(3,NP),DIST(NPF),FTOOL(NPF),X(NP),Y(NP),Z(NP),T(2,6),TT(6,2), AE(2,NM),&ME(2,NE),NAE(NE),UE(6),U(2),AKE(2,2),FE1(2),FE(6),FF(NPF),PP(NPF),&SG(NE),SM(NE),FF2(NPF),RR(2,NR),FL(3*NR)SG=0;SM=0;FF=0;FF2=0DO I=1,NPDO J=1,NFLAB=IT(J,I)IF(LAB.EQ.0) THENDIST(3*(I-1)+J)=0.0ELSEIF(B.LE.NN) THENDIST(3*(I-1)+J)=FTOOL(LAB)ENDIFENDDOENDDODO IE=1,NEN1=ME(1,IE);N2=ME(2,IE)DO J=1,NFUE(J)=DIST(3*(N1-1)+J)UE(3+J)=DIST(3*(N2-1)+J)ENDDOCALL FT(IE,NP,NE,X,Y,Z,ME,T)CALL FKE(NP,NE,NM,IE,X,Y,Z,ME,NAE,AE,AKE)U=MATMUL(T,UE)FE1=MATMUL(AKE,U)CALL MAT(2,6,T,TT)FE=MATMUL(TT,FE1)DO J=1,NFFF(3*(N1-1)+J)=FF(3*(N1-1)+J)+FE(J)FF(3*(N2-1)+J)=FF(3*(N2-1)+J)+FE(3+J)ENDDOISW=NAE(IE)AO=AE(2,ISW)SG(IE)=FE1(2)SM(IE)=FE1(2)/AODO I=1,NPFFF2(I)=FF(I)-PP(I)ENDDOENDDODO I=1,NPDO J=1,NFLAB=IT(J,I)IF(LAB.EQ.0)THENK=K+1FL(K)=FF2(3*(I-1)+J)ENDIFENDDOENDDOWRITE(12,*)' 'WRITE(12,*)'****************************************'WRITE(12,*)'*********The Results of Calculation**********'WRITE(12,*)'****************************************'WRITE(12,600)WRITE(12,610)(I,DIST(3*I-2)*1000,DIST(3*I-1)*1000,&DIST(3*I)*1000, I=1,NP)WRITE(12,620)WRITE(12,630)(IE,SG(IE),SM(IE)/1000,IE=1,NE)WRITE(12,640)WRITE(12,650)(INT(RR(1,I)),FL(3*I-2),FL(3*I-1),FL(3*I),I=1,NR)600 FORMAT(6X,'The Joint Displacement'/2x,'Joint',6X,'X(mm)',8X,'Y(mm)',6X,'Z(mm)') 610 FORMAT(1X,I4,2X,1P3E12.2)620 FORMAT(//6X,'The Terminal Forces'/2x,'Member', 6X,'FN(kN)',6X,'σ(MPa)')630 FORMAT(3X,I4,2X,F8.2,6X,F8.2)640 FORMAT(//6X,'The Bearing Force'/2x,'Joint',8X,'X',8X,'Y',8X,'Z')650 FORMAT(2X,I4,2X,3F10.2)RETURNEND3、算例以下图所示空间桁架为例:圆形桁架穹项,其几何尺寸如图(a)所示,整体坐标系原点取在拱顶,集中荷载P作用于拱顶,各杆截面面积A和弹性模量E都相同(取E=210GPa,A=0.04m2);各杆件及结点编号如图(b)所示。
桁架结构MATLAB编程
桁架结构% 变量说明% NPOIN NELEM NVFIX NFPOIN NFPRES% 总结点数,单元数, 约束个数, 受力结点数, 非结点力数% COORD LNODS YOUNG% 结构节点坐标数组, 单元定义数组, 弹性模量% FPOIN FPRES FORCE FIXED% 结点力数组,非结点力数组,总体荷载向量, 约束信息数组% HK DISP% 总体刚度矩阵,结点位移向量%**************************************************format short e%设定输出类型clear %清除内存变量FP1=fopen('6-6.txt','rt'); %打开初始数据文件%读入控制数据NELEM=fscanf(FP1,'%d',1); %单元数NPOIN=fscanf(FP1,'%d',1); %结点数NVFIX=fscanf(FP1,'%d',1); %约束数NFPOIN=fscanf(FP1,'%d',1); %结点荷载数NFPRES=fscanf(FP1,'%d',1); %非结点荷载数YOUNG=fscanf(FP1,'%f',1); %弹性模量% 读取结构信息LNODS=fscanf(FP1,'%f',[4,NELEM])'% 单元定义:左、右结点号,面积,惯性矩(共计 NELEM组)COORD=fscanf(FP1,'%f',[2,NPOIN])'% 坐标: x,y坐标(共计 NPOIN 组)FPOIN=fscanf(FP1,'%f',[3,NFPOIN])'% 节点力(共计 NFPOIN 组):结点号、X方向力(向右正),% Y方向力(向上正),FPRES=fscanf(FP1,'%f',[4,NFPRES])' % 均布力(共计% NFPRES 组):单元号、荷载类型、荷载大小、距离左端长度FIXED=fscanf(FP1,'%f',NVFIX)'% 约束信息:约束对应的位移编码(共计 NVFIX 组)%---------------------------------------------------------HK=zeros(2*NPOIN,2*NPOIN); % 张成总刚矩阵并清零FORCE=zeros(2*NPOIN,1); % 张成总荷载向量并清零%形成总刚for i=1:NELEM % 对单元个数循环% 生成局部单刚(局部坐标) 右手坐标系EK=ele_EK(i,LNODS,COORD,YOUNG);T=zbzh(i,LNODS,COORD); % 坐标转换矩阵EKT=T'*EK*T; % 生成整体单刚(整体坐标系)% 组成总刚按2*2子块加入总刚中(共计4块)for j=1:2 %对行进行循环---按结点号循环N1=LNODS(i,j)*2; % j结点第2个位移的整体编码for k=1:2 %对列进行循环---按结点号循环N2=LNODS(i,k)*2; % k结点第2个位移的整体编码HK((N1-1):N1,(N2-1):N2)=HK((N1-1):N1,(N2-1):N2)...+EKT(j*2-1:j*2,k*2-1:k*2);endendend% 由结点力与非结点力生成总荷载向量列阵for i=1:NFPOIN % 对结点荷载个数进行循环N1=FPOIN(i,1); % 作用荷载的结点号N1=N1*2-2; % 该结点号对应第一个位移编码 - 1for j=1:2FORCE(N1+j)=FORCE(N1+j)+FPOIN(i,j+1);%取结点荷载endend% 计算由非结点荷载引起的等效结点荷载for i=1:NFPRES % 对非结点荷载个数进行循环F0=ele_FPRES(i,FPRES,LNODS,COORD); %计算单元固端力% 对单元局部杆端力要进行坐标转换T=zbzh(i,LNODS,COORD); % 坐标转换矩阵F0=T'*F0;ele=FPRES(i,1); % 取荷载所在的单元号NL=LNODS(ele,1); NR=LNODS(ele,2); %单元的左右结点号% 将单元固端力变成等效结点荷载(注意固端力与等效结点荷载符号相反)FORCE((3*NL-2):3*NL)=FORCE((3*NL-2):3*NL)-F0(1:3);FORCE((3*NR-2):3*NR)=FORCE((3*NR-2):3*NR)-F0(4:6);end% 总刚、总荷载进行边界条件处理for j=1:NVFIX % 对约束个数进行循环N1=FIXED(j);HK(1:2*NPOIN,N1)=0; HK(N1,1:2*NPOIN)=0; HK(N1,N1)=1;% 将零位移约束对应的行、列变成零,主元变成1FORCE(N1)=0;end%---------------------------------------------------------DISP=HK\FORCE % 方程求解,HK先求逆再与力向量左乘%---------------------------------------------------------% 求结构各个单元内力EDISP=zeros(4,1); % 单元位移列向量清零for i=1:NELEM % 对单元个数进行循环for j=1:2 %对杆端循环% i单元左右端结点号*2 = 该结点的最后一个位移编码N1=LNODS(i,j)*2;% 取一端的单元位移列向量EDISP(2*j-1:2*j)=DISP(N1-1:N1);end% 生成局部单刚(局部坐标) 右手坐标系EK=ele_EK(i,LNODS,COORD,YOUNG);T=zbzh(i,LNODS,COORD); % 坐标转换矩阵FE=EK*T*EDISP; %计算局部坐标杆端力(由结点位移产生)for j=1:NFPRESif FPRES(j,1) == i %成立时,当前单元上有非结点荷载F0=ele_FPRES(j,FPRES,LNODS,COORD);%单元固端力FE=FE+F0; % 考虑由非结点荷载引起的杆端力endendFE % 打印杆端力end%-------------------------------------------------------------------------------- % 计算桁架单元刚度矩阵函数 EK% 入口参数:单元号、单元信息数组、结点坐标、弹性模量% 出口参数:局部桁架单元刚度矩阵EKfunction EK=ele_EK(i,LNODS,COORD,YOUNG)NL=LNODS(i,1); NR=LNODS(i,2); %左右结点号dx=COORD(NR,1)-COORD(NL,1); % x 坐标差dy=COORD(NR,2)-COORD(NL,2); % y 坐标差L=sqrt(dx^2+dy^2); %单元长度A=LNODS(i,3); %面积;E=YOUNG;% 生成单刚(局部坐标) 右手坐标系EK =[E*A/L 0 -E*A/L 0 ;...0 0 0 0 ;...-E*A/L 0 E*A/L 0 ;...0 0 0 0 ];return%---------------------------------------------------------------------------------%计算单元固端力函数(正方向:X向右 Y向上 M逆时针)% 入口参数:荷载序号,荷载信息,单元信息,结点坐标% 出口参数:单元固端力——左右两端的轴力、剪力、弯矩function F0=ele_FPRES(iFPRES,FPRES,LNODS,COORD)ele=FPRES(iFPRES,1); %取荷载所在的单元号G=FPRES(iFPRES,3); %单元荷载大小C=FPRES(iFPRES,4); %单元荷载与左端距离NL=LNODS(ele,1); NR=LNODS(ele,2); %单元的左右结点号dx=COORD(NR,1)-COORD(NL,1); % x 坐标差dy=COORD(NR,2)-COORD(NL,2); % y 坐标差L=sqrt(dx^2+dy^2); %单元长度% 计算公式中一些常出现的项D=L-C; C1=C/L; C2=C1*C1; C3=C1*C2;B1=D/L; B2=B1/L;F0=[0;0;0;0;0;0]; %单元固端力清零switch FPRES(iFPRES,2)case 1 %均布荷载F0(2)=-G*C*(2-2*C2+C3)/2.0;F0(3)=-G*C*C*(6-8*C1+3*C2)/12.0;F0(5)=-G*C-F0(2);F0(6)=G*C*C*C1*(4-3*C1)/12.0;case 2 %横向集中力F0(2)=-G*B1*B2*(L+2*C);F0(3)=-G*C*B1*B1;F0(5)=-G*C2*(L+2*D)/L;F0(6)=G*D*C2;case 3 %纵向集中力F0(1)=-G*B1;F0(4)=-G*C1;endreturn%-------------------------------------------------------------------------------- % 形成第i单元的坐标转换矩阵函数 T(4,4)% 入口参数:单元号,单元信息,结点坐标% 出口参数:坐标转换矩阵(整体向局部投影)function T=zbzh(i,LNODS,COORD)NL=LNODS(i,1); %左结点号NR=LNODS(i,2); %右结点号dx=COORD(NR,1)-COORD(NL,1); % x 坐标差dy=COORD(NR,2)-COORD(NL,2); % y 坐标差L=sqrt(dx^2+dy^2); % 单元长度c=dx/L; % cos a (与 x 轴夹角余弦) s=dy/L; % sin aT=[ c s 0 0;...-s c 0 0;...0 0 c s0 0 -s c ];return6-6.txt文件数据:4 45 2 0 2.95e111 2 0.001 13 2 0.001 11 3 0.001 14 3 0.001 10 00.4 00.4 0.30 0.32 2e4 03 0 -2.5e41 2 4 7 8。
桁架结构建模课程设计
桁架结构建模课程设计一、课程目标知识目标:1. 让学生掌握桁架结构的基本概念、分类及特点;2. 使学生了解桁架结构在工程中的应用及优势;3. 培养学生对桁架结构建模软件的操作能力。
技能目标:1. 能够运用所学知识对桁架结构进行分类和分析;2. 掌握桁架结构建模的基本步骤,能够独立完成简单桁架结构的建模;3. 学会利用建模软件对桁架结构进行受力分析和优化设计。
情感态度价值观目标:1. 培养学生热爱科学、追求真理的精神;2. 培养学生具备团队合作意识,学会在团队中发挥个人优势;3. 增强学生对我国建筑事业的认同感,激发为我国建筑事业贡献力量的意愿。
课程性质:本课程属于工程专业课程,旨在培养学生对桁架结构建模的实际操作能力。
学生特点:学生具备一定的力学基础和计算机操作能力,对工程实践有较高的兴趣。
教学要求:结合实际工程案例,注重理论与实践相结合,提高学生的实际操作能力。
通过本课程的学习,使学生能够将所学知识应用于实际工程中,为我国建筑事业培养具备实践能力的优秀人才。
课程目标分解为具体学习成果,以便后续教学设计和评估。
二、教学内容1. 桁架结构基本概念:介绍桁架的定义、分类及特点,使学生了解桁架结构在工程中的应用。
教材章节:第一章 桁架结构概述2. 桁架结构受力分析:讲解桁架结构的受力特点,分析桁架结构在受力过程中的内力分布。
教材章节:第二章 桁架结构受力分析3. 桁架结构建模方法:介绍桁架结构建模的基本原理和常用建模软件,指导学生掌握建模步骤。
教材章节:第三章 桁架结构建模方法4. 桁架结构建模实践:结合实际工程案例,指导学生运用建模软件进行桁架结构建模。
教材章节:第四章 桁架结构建模实践5. 桁架结构优化设计:分析桁架结构优化设计的方法,指导学生利用建模软件对桁架结构进行优化。
教材章节:第五章 桁架结构优化设计6. 桁架结构建模案例分析:选取典型桁架结构建模案例,分析其建模过程及优化方法。
教材章节:第六章 桁架结构建模案例分析教学内容安排和进度:共安排6个课时,每个课时对应上述一个教学内容。
新代桁架系统编程教程
新代桁架系统编程教程引言:新代桁架系统是一种新兴的结构系统,通过桁架结构的优势,能够在建筑领域中发挥重要作用。
而对于新代桁架系统的编程,更是为设计师和工程师们提供了更多的可能性。
本教程将以新代桁架系统编程为主题,为读者详细介绍如何进行新代桁架系统的编程。
一、新代桁架系统的概述新代桁架系统是一种基于传统桁架结构的升级改进,它采用了更加先进的设计理念和工艺技术。
新代桁架系统在结构强度、搭建速度和灵活性方面都有显著的提升,因此在建筑领域中得到了广泛应用。
而新代桁架系统的编程则是为了更好地实现其功能和优势。
二、新代桁架系统编程的基础知识1. 桁架结构的原理和特点:了解桁架结构的基本原理和特点,包括节点、杆件、受力分析等内容,为后续的编程打下基础。
2. 编程软件的选择:选择合适的编程软件,例如Rhino、Grasshopper等,以及相应的插件或脚本工具,为编程工作提供支持。
3. 编程语言的学习:学习一种适合新代桁架系统编程的语言,例如Python、C#等,掌握其基本语法和常用函数,为编程工作做好准备。
三、新代桁架系统编程的实践步骤1. 数据准备:收集和整理与新代桁架系统相关的数据,包括结构参数、材料属性、受力要求等,为后续的编程工作提供输入。
2. 桁架生成:通过编程软件,根据输入的数据和设计要求,生成新代桁架系统的初始结构模型,并进行初步的受力分析。
3. 结构优化:通过编程工具,对新代桁架系统进行优化设计,以提高结构的性能和效率,例如减少材料使用量、优化节点连接等。
4. 受力分析:利用编程软件进行新代桁架系统的受力分析,验证结构的稳定性和强度,确保其满足设计要求。
5. 结果展示:通过编程软件将优化后的新代桁架系统进行可视化展示,以便设计师和工程师们更好地理解和评估结构的性能。
四、新代桁架系统编程的应用案例1. 建筑结构设计:通过新代桁架系统的编程,实现建筑结构的设计和优化,提高结构的稳定性和安全性。
2. 建筑外观设计:利用新代桁架系统的编程,实现建筑外观的设计和变形效果,为建筑增添独特的艺术魅力。
空间桁架结构程序的设计(Fortran)
空间桁架静力分析程序及算例1、变量及数组说明2、空间桁架结构有限元分析程序源代码!主程序(读入文件,调用总计算程序,输出结果)CHARACTER IDFUT*20,OUTFUT*20WRITE(*,*) 'Input Data File name:'READ (*,*)IDFUTOPEN (11,FILE=IDFUT,STATUS='OLD')WRITE(*,*) 'Output File name:'READ (*,*)OUTFUTOPEN(12,FILE=OUTFUT,STATUS='UNKNOWN')WRITE(12,*)'*****************************************'WRITE(12,*)'* Program for Analysis of Space Trusses *'WRITE(12,*)'* School of Civil Engineering CSU *'WRITE(12,*)'* 2012.6.25 Designed By MuZhaoxiang *'WRITE(12,*)'*****************************************'WRITE(12,*)' 'WRITE(12,*)'*****************************************'WRITE(12,*)'*************The Input Data****************'WRITE(12,*)'*****************************************'WRITE(12,100)READ(11,*)NF,NP,NE,NM,NR,NCF,NDWRITE(12,110)NF,NP,NE,NM,NR,NCF,ND100 FORMAT(6X,'The General Information'/2X,'NF',5X,'NP',5X,'NE',5X,'NM',5X,'NR',& 5X,'NCF',5X,'ND')110 FORMAT(2X,I2,6I7)NPF=NF*NPNDF=ND*NFCALL ANALYSE(NF,NP,NE,NM,NR,NCF,ND,NPF,NDF)END!********************************************************************!总计算程序SUBROUTINE ANALYSE(NF,NP,NE,NM,NR,NCF,ND,NPF,NDF)DIMENSION X(NP),Y(NP),Z(NP),MM(NE),ME(ND,NE),IT(NF,NP),RR(ND,NR), NAE(NE),&AE(1,2),PF(4,NCF),LMT(NDF,NE),MAXA(NPF),CKK(1000),V(NPF),DIST(NPF),&PP(NPF),FF(NPF),SG(NE),SM(NE)READ(11,*)(X(I),Y(I),Z(I),I=1,NP)READ(11,*)(MM(I),ME(1,I),ME(2,I),NAE(I),I=1,NE)READ(11,*)(RR(1,J),RR(2,J),J=1,NR)READ(11,*)(AE(1,J),J=1,2)WRITE(12,120)WRITE(12,121)(I,X(I),Y(I),Z(I),I=1,NP)WRITE(12,130)WRITE(12,131)(MM(I),ME(1,I),ME(2,I),NAE(I),I=1,NE)WRITE(12,140)WRITE(12,141)(INT(RR(1,J)),RR(2,J),J=1,NR)WRITE(12,150)WRITE(12,151)(AE(1,J),J=1,2)IF(NCF/=0)THENREAD(11,*)((PF(I,J),I=1,4),J=1,NCF)WRITE(12,160)WRITE(12,161)(INT(PF(1,J)),PF(2,J),PF(3,J),PF(4,J),J=1,NCF)ENDIF120 FORMAT(/6X,'The Information of Joints'/2x,'Joint',5X,'X',5X,'Y',5X,'Z')121 FORMAT(1X,I4,3F8.1)130 FORMAT(/6X,'The Information of Members'/2x,'Member',2X,'START',4X,'END',6X,'NAE')131 FORMAT(1X,I4,3I8)140 FORMAT(/6X,'The Information of SUPPORTS'/2x,'Joint',5X,'S')141 FORMAT(1X,I4,F8.3)150 FORMAT(/6X,'The Information of Sections'/4x,'E0',8X,'A0')151 FORMAT(1X,1PE8.2,F8.4)160 FORMAT(/6X,'The Loading at Joints'/2x,'Joint',5X,'FX',5X,'FY',7X,'FZ')161 FORMAT(1X,I4,3F8.2)CALL FLMT(NP,NE,NN,NNM,NR,RR,ND,NF,NDF,ME,IT,LMT)CALL FMAXA(NNM,NE,LMT,MAXA,NWK,NPF,NDF)CALL LP(V,PP,IT,PF,NN,NCF,NF,NP,NPF)CALL CONKB(NP,NE,NM,NWK,ME,X,Y,Z,AE,NAE,LMT,MAXA,CKK,NNM)ISH=1CALL LDLT(CKK,MAXA,NN,ISH,IOUT,NWK,NNM)CALL REBACK(CKK,V,MAXA,NN,NWK,NNM)CALL DISPLS(NP,NE,NPF,NM,NN,IT,V,DIST,AE,NAE,X,Y,Z,PP,FF,SG,SM,ME,NR,RR,NF)END!********************************************************************!矩阵转置子程序SUBROUTINE MAT(M,N,A,B)DIMENSION A(M,N),B(N,M)DO I=1,MDO J=1,NB(J,I)=A(I,J)END DOEND DORETURNEND!单元刚度矩阵的形成SUBROUTINE FKE(NP,NE,NM,IE,X,Y,Z,ME,NAE,AE,AKE)DIMENSION X(NP),Y(NP),Z(NP),ME(2,NE),NAE(NE),AE(2,NM) ,AKE(2,2) N1=ME(1,IE)N2=ME(2,IE)X1=X(N1);Y1=Y(N1);Z1=Z(N1)X2=X(N2);Y2=Y(N2);Z2=Z(N2)BL=SQRT((X2-X1)**2+(Y2-Y1)**2+(Z2-Z1)**2)NMI=NAE(IE)E0=AE(1,NMI);A0=AE(2,NMI)C=E0*A0/BLAKE(1,1)=CAKE(1,2)=-CAKE(2,1)=-CAKE(2,2)=CRETURNEND!单元坐标转换矩阵SUBROUTINE FT(IE,NP,NE,X,Y,Z,ME,T)DIMENSION X(NP),Y(NP),Z(NP),ME(2,NE),T(2,6)T=0N1=ME(1,IE);N2=ME(2,IE)X1=X(N1);Y1=Y(N1);Z1=Z(N1)X2=X(N2);Y2=Y(N2);Z2=Z(N2)BL=SQRT((X2-X1)**2+(Y2-Y1)**2+(Z2-Z1)**2)CX=(X2-X1)/BLCY=(Y2-Y1)/BLCZ=(Z2-Z1)/BLT(1,1)=CX;T(2,4)=CXT(1,2)=CY;T(2,5)=CYT(1,3)=CZ;T(2,6)=CZRETURNEND!生成单元联系数组LMTSUBROUTINE FLMT(NP,NE,NN,NNM,NR,RR,ND,NF,NDF,ME,IT,LMT)DIMENSION IT(NF,NP),LMT(NDF,NE),ME(ND,NE),RR(2,NR)NN=0;NNM=0;IT=0;LMT=0N=0DO I=1,NPC=0DO K=1,NRKR=RR(1,K)IF(KR.EQ.I) C=RR(2,K)ENDDONC=C !NC=0,提取了整数部分C=C-NC !C=0.***,例如C=0.111DO J=1,NFC=C*10.0 !例如C=1.21L=C+0.1 !提取C整数部分,例如L=1,即提取了约束RR(2,K)十分位 !上的数字,这里"+0.1"是为了防止四舍五入是出现错误 C=C-LIF(L.EQ.0)THENN=N+1IT(J,I)=NELSEIT(J,I)=0ENDIFENDDOENDDONN=NNNM=NN+1DO IE=1,NEDO I=1,NDNI=ME(I,IE)DO J=1,NFLMT((I-1)*NF+J,IE)=IT(J,NI)ENDDOENDDOENDDORETURNEND!二维总刚中对角线元地址数组SUBROUTINE FMAXA(NNM,NE,LMT,MAXA,NWK,NPF,NDF)DIMENSION MAXA(NPF),LMT(NDF,NE)MAXA=0;NWK=0MAXA(1)=1DO I=2,NNMIP=I-1IG=IPDO IE=1,NEDO J=1,NDFIF(LMT(J,IE).EQ.IP) THENDO K=1,NDFIF(LMT(K,IE).GT.0.AND.LMT(K,IE).LE.IG) IG=LMT(K,IE)ENDDOEND IFENDDOENDDOMAXA(I)= MAXA(I-1)+IP-IG+1ENDDONWK= MAXA(NNM)-1RETURNEND!生成一维存储结构总刚度矩阵SUBROUTINE CONKB(NP,NE,NM,NWK,ME,X,Y,Z,AE,NAE,LMT,MAXA,CKK,NNM)DIMENSION CKK(NWK),X(NP),Y(NP),Z(NP),AE(2,NM),NAE(NE),LMT(6,NE),ME(2,NE),& MAXA(NNM),AK(6,2),AKE(2,2),T(2,6),TT(6,2),TAK(6,6)CKK=0DO 10 IE=1,NETAK=0CALL FKE(NP,NE,NM,IE,X,Y,Z,ME,NAE,AE,AKE)CALL FT(IE,NP,NE,X,Y,Z,ME,T)CALL MAT(2,6,T,TT)AK=MATMUL(TT,AKE)TAK=MATMUL(AK,T) !总体坐标系下的单元刚度矩阵DO 220 I=1,6DO 220 J=1,6NI=LMT(I,IE)NJ=LMT(J,IE)IF((NJ-NI).GE.0.AND.NI*NJ.GT.0) THENIJ=MAXA(NJ)+NJ-NICKK(IJ)=CKK(IJ)+TAK(I,J)ENDIF220 CONTINUE10 CONTINUERETURNEND!生成荷载矩阵SUBROUTINE LP(V,PP,IT,PF,NN,NCF,NF,NP,NPF)DIMENSION V(NN),PP(NPF),IT(NF,NP),PF(4,NCF)V=0PP=0DO I=1,NFDO J=1,NPDO K=1,NCFIF(J.EQ.PF(1,K).AND.IT(I,J).NE.0)THENV(IT(I,J))=PF(I+1,K)ENDIFENDDOENDDOENDDODO K=1,NCFDO I=1,NPIF(I.EQ.PF(1,K))THENPP(NF*(I-1)+1)=PF(2,K)PP(NF*(I-1)+2)=PF(3,K)PP(NF*(I-1)+3)=PF(4,K)ENDIFENDDOENDDORETURNEND!对一维结构总刚度矩阵进行矩阵分解(LDLT)SUBROUTINE LDLT(A,MAXA,NN,ISH,IOUT,NWK,NNM) DIMENSION A(NWK),MAXA(NNM)IF(NN.EQ.1) RETURNDO 200 N=1,NNKN=MAXA(N)KL=KN+1KU=MAXA(N+1)-1KH=KU-KLIF(KH)304,240,210210 K=N-KHIC=0KLT=KUDO 260 J=1,KHKLT=KLT-1IC=IC+1KI=MAXA(K)ND=MAXA(K+1)-KI-1IF(ND) 260,260,270270 KK=MIN0(IC,ND)C=0.0DO 280 L=1,KK280 C=C+A(KI+L)*A(KLT+L)A(KLT)=A(KLT)-C260 K=K+1240 K=NB=0.0DO 300 KK=KL,KUK=K-1KI=MAXA(K)C=A(KK)/A(KI)IF(ABS(C).LT.1.0E+07) GOTO 290WRITE(IOUT,2010) N,CSTOP290 B=B+C*A(KK)300 A(KK)=CA(KN)=A(KN)-B304 IF(A(KN)) 310,310,200310 IF(ISH.EQ.0) GOTO 320IF(A(KN).EQ.0.0) A(KN)=-1.0E-16GOTO 200320 WRITE(IOUT,2000) N,A(KN)STOP200 CONTINUERETURN2000 FORMAT(//,' Stop-stiffness matrix not positive definite',//,'no positive& pivot for equation',I4,&//,' pivot =',E20.10)2010 FORMAT(//,' Stop-strum sequence check failed + because of multiplier& growth for column &number',I4,//,' Multiplier = ',E20.8)END!回代,求得节点位移SUBROUTINE REBACK(A,V,MAXA,NN,NWK,NNM)DIMENSION A(NWK),V(NN,1),MAXA(NNM)NIP=1DO IP=1,NIPDO 400 N=1,NNKL=MAXA(N)+1KU=MAXA(N+1)-1IF(KU-KL) 400,410,410410 K=NC=0.0DO 420 KK=KL,KUK=K-1420 C=C+A(KK)*V(K,IP)V(N,IP)=V(N,IP)-C400 CONTINUEDO 480 N=1,NNK=MAXA(N)480 V(N,IP)=V(N,IP)/A(K)IF(NN.EQ.1)RETURNN=NNDO 500 L=2,NNKL=MAXA(N)+1KU=MAXA(N+1)-1IF(KU-KL) 500,510,510510 K=NDO 520 KK=KL,KUK=K-1520 V(K,IP)=V(K,IP)-A(KK)*V(N,IP)500 N=N-1ENDDORETURNEND!求解杆件力、支反力和位移SUBROUTINE DISPLS(NP,NE,NPF,NM,NN,IT,FTOOL,DIST,AE,NAE,X,Y, Z,PP,FF,SG,SM,ME,& NR,RR,NF)DIMENSION IT(3,NP),DIST(NPF),FTOOL(NPF),X(NP),Y(NP),Z(NP),T(2,6),TT(6,2), AE(2,NM),&ME(2,NE),NAE(NE),UE(6),U(2),AKE(2,2),FE1(2),FE(6),FF(NPF),PP(NPF),&SG(NE),SM(NE),FF2(NPF),RR(2,NR),FL(3*NR)SG=0;SM=0;FF=0;FF2=0DO I=1,NPDO J=1,NFLAB=IT(J,I)IF(LAB.EQ.0) THENDIST(3*(I-1)+J)=0.0ELSEIF(B.LE.NN) THENDIST(3*(I-1)+J)=FTOOL(LAB)ENDIFENDDOENDDODO IE=1,NEN1=ME(1,IE);N2=ME(2,IE)DO J=1,NFUE(J)=DIST(3*(N1-1)+J)UE(3+J)=DIST(3*(N2-1)+J)ENDDOCALL FT(IE,NP,NE,X,Y,Z,ME,T)CALL FKE(NP,NE,NM,IE,X,Y,Z,ME,NAE,AE,AKE)U=MATMUL(T,UE)FE1=MATMUL(AKE,U)CALL MAT(2,6,T,TT)FE=MATMUL(TT,FE1)DO J=1,NFFF(3*(N1-1)+J)=FF(3*(N1-1)+J)+FE(J)FF(3*(N2-1)+J)=FF(3*(N2-1)+J)+FE(3+J)ENDDOISW=NAE(IE)AO=AE(2,ISW)SG(IE)=FE1(2)SM(IE)=FE1(2)/AODO I=1,NPFFF2(I)=FF(I)-PP(I)ENDDOENDDODO I=1,NPDO J=1,NFLAB=IT(J,I)IF(LAB.EQ.0)THENK=K+1FL(K)=FF2(3*(I-1)+J)ENDIFENDDOENDDOWRITE(12,*)' 'WRITE(12,*)'****************************************'WRITE(12,*)'*********The Results of Calculation**********'WRITE(12,*)'****************************************'WRITE(12,600)WRITE(12,610)(I,DIST(3*I-2)*1000,DIST(3*I-1)*1000,&DIST(3*I)*1000, I=1,NP)WRITE(12,620)WRITE(12,630)(IE,SG(IE),SM(IE)/1000,IE=1,NE)WRITE(12,640)WRITE(12,650)(INT(RR(1,I)),FL(3*I-2),FL(3*I-1),FL(3*I),I=1,NR)600 FORMAT(6X,'The Joint Displacement'/2x,'Joint',6X,'X(mm)',8X,'Y(mm)',6X,'Z(mm)') 610 FORMAT(1X,I4,2X,1P3E12.2)620 FORMAT(//6X,'T he Terminal Forces'/2x,'Member', 6X,'FN(kN)',6X,'σ(MPa)')630 FORMAT(3X,I4,2X,F8.2,6X,F8.2)640 FORMAT(//6X,'The Bearing Force'/2x,'Joint',8X,'X',8X,'Y',8X,'Z')650 FORMAT(2X,I4,2X,3F10.2)RETURNEND3、算例以下图所示空间桁架为例:圆形桁架穹项,其几何尺寸如图(a)所示,整体坐标系原点取在拱顶,集中荷载P作用于拱顶,各杆截面面积A和弹性模量E都相同(取E=210GPa,A=0.04m2);各杆件及结点编号如图(b)所示。
空间桁架程序设计

第六章 空间桁架程序设计第一节 概述一、计算模型及计算方法1. 计算模型及整体坐标系下单元刚度矩阵的形成 选取计算模型时,应以杆简联结点和支座结点作为计算结点,各结点均为光滑的理想铰结点;以任意两结点间的杆简为计算单元,各单元支承受轴力;非结点荷载要转化为等效结点荷载,各单元抗拉压刚度相同。
由于结构为空间桁架,所以,结构各结点的位移分量为[]Tz y x ∆∆∆=∆在局部坐标系下,单元的杆端位移列阵和杆端力列阵分别为e j j j i i i ej i ew v u w v u ⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎦⎤⎢⎢⎣⎡=δδδ ej j j i i i e j i e z y x z y x F F F ⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎦⎤⎢⎢⎣⎡= (6-1) 式中j j j i i i w v u w v u 、、和、、分别为结点i 、j 沿局部坐标系z y x 、、方向的线位移,见图6-1。
杆端力应与杆端位移一一对应,图中没再绘出。
当单元的杆端位移分量为任意值时,可写出空间桁架单元刚度方程。
以矩阵表示为ej j j i i i eej j j i i i w v u w v u l EA Z Y X Z Y X ⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡--=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡00000000001001000000000000001001 (6-2)简写成 ee e k F δ= (6-3) 式中eel EA k ⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡--=000000000001001000000000000001001 (6-4) 称为单元○e 在局部坐标系下的刚度矩阵。
在空间桁架中,各杆方向不尽相同。
每根杆件采用各自的局部坐标系,这对于单元分析十分方便。
有限元大作业桁架课设
有限元基础大作业空间桁架结构分析学号:010810726学生姓名:同组成员:完成时间:2013年11月20日南京航空航天大学航空宇航学院二〇一一年十月八日一、问题概述该模型为一空间桁架结构,由36根截面积为10mm²,长度分别为30、40、50cm的杆组成,共有12个节点,水平面均为由30cm长杆组成的等边三角形,底部三个节点均为固定铰链约束。
杆材料相同,弹性模量为7 E+6N/cm²,µ=0.3。
在结构的5个节点上分别作用了大小均为1000N的外载荷,求相应的各干轴力。
二、模型简化(一)建立数学模型建立如下图所示的空间坐标系,以及相应的节点编号。
(二)建立有限元模型将结构离散化,根据空间桁架的受力特点将它离散为“受轴力的空间杆单元”。
所取的整体坐标、节点和单元的编号,计算所需的原始数据列表如下:单元号节点坐标lcmAcm²EN/ cm²编号i-j Xicm YicmZicmXjcmYjcmZjcm○11-4 -15 0 0 -15 0 40 40 0.1 7E+6 ○21-5 -15 0 0 0 25.98 40 50 0.1 7E+6 ○31-6 -15 0 0 15 0 40 50 0.1 7E+6 ○42-4 0 25.98 0 -15 0 40 50 0.1 7E+6 ○52-5 0 25.98 0 0 25.98 40 40 0.1 7E+6 ○62-6 0 25.98 0 15 0 40 50 0.1 7E+6 ○73-4 15 0 0 -15 0 40 50 0.1 7E+6 ○83-5 15 0 0 0 25.98 40 50 0.1 7E+6 ○93-6 15 0 0 15 0 40 40 0.1 7E+6 ○104-5 -15 0 40 0 25.98 40 30 0.1 7E+6 ○115-6 0 25.98 40 15 0 40 30 0.1 7E+6 ○126-4 15 0 40 -15 0 40 30 0.1 7E+6 ○134-7 -15 0 40 -15 0 80 40 0.1 7E+6 ○144-8 -15 0 40 0 25.98 80 50 0.1 7E+6 ○154-9 -15 0 40 15 0 80 50 0.1 7E+6 ○165-7 0 25.98 0 -15 0 80 50 0.1 7E+6 ○175-8 0 25.98 0 0 25.98 80 40 0.1 7E+6 ○185-9 0 25.98 40 15 0 80 50 0.1 7E+6 ○196-7 15 0 40 -15 0 80 50 0.1 7E+6 ○206-8 15 0 40 0 25.98 80 50 0.1 7E+6 ○216-9 15 0 40 15 0 80 40 0.1 7E+6 ○227-8 -15 0 80 0 25.98 80 30 0.1 7E+6 ○238-9 0 25.98 80 15 0 80 30 0.1 7E+6 ○249-7 15 0 80 -15 0 80 30 0.1 7E+6 ○257-10 -15 0 80 -15 0 120 40 0.1 7E+6 ○267-11 -15 0 80 0 25.98 120 50 0.1 7E+6○277-12 -15 0 80 15 0 120 50 0.1 7E+6 ○288-10 0 25.98 80 -15 0 120 50 0.1 7E+6 ○298-11 0 25.98 80 0 25.98 120 40 0.1 7E+6 ○308-12 0 25.98 80 15 0 120 50 0.1 7E+6 ○319-10 15 0 80 -15 0 120 50 0.1 7E+6 ○329-11 15 0 80 0 25.98 120 50 0.1 7E+6 ○339-12 15 0 80 15 0 120 40 0.1 7E+6 ○3410-11 -15 0 120 0 25.98 120 30 0.1 7E+6 ○3511-12 0 25.98 120 15 0 120 30 0.1 7E+6 ○3612-10 15 0 120 -15 0 120 30 0.1 7E+6(三)受载与约束情况本题所受的节点外载荷为:X7=300.00 Y7=429.60 Z7=-800.00X9=-300.00 Y9=429.60 Z9=-800.00Z10=-1000 Z11=-1000 Z12=-1000其余节点外力为0本题中采用的为置大数法,即将给定的节点位移处的结构刚度矩阵中对应行的主元素换成计算机所能允许的大数。
matlab桁架结构有限元计算
matlab桁架结构有限元计算
在MATLAB中,进行桁架结构的有限元计算可以按照以下步
骤进行:
1. 定义节点和单元:根据实际问题的几何形状和拓扑关系,定义桁架结构的节点和单元。
节点是桁架结构的连接点,单元是连接节点的构件。
2. 定义材料属性和截面属性:根据实际问题的材料和截面要求,定义桁架结构的材料属性和截面属性。
材料属性包括弹性模量和泊松比等,截面属性包括截面面积和惯性矩等。
3. 组装刚度矩阵:根据节点和单元的几何形状和材料属性,计算每个单元的局部刚度矩阵,然后根据单元和节点的连接关系,将局部刚度矩阵组装成整体刚度矩阵。
4. 施加边界条件:根据实际问题的边界条件,将边界节点的位移固定为零,或施加位移或力的约束条件。
5. 求解位移和反力:使用求解线性方程组的方法,求解位移和反力。
可以使用MATLAB中的线性方程组求解函数(如'\''运
算符)来计算。
6. 计算应力和应变:根据位移和节点的几何形状,计算节点上的应变,然后根据材料属性,计算节点上的应力。
以上步骤涵盖了桁架结构的有限元计算的基本流程,具体实现时需要根据实际问题进行适当的调整和扩展。
空间桁架结构程序设计(Fortran)
空间桁架静力分析程序及算例1、变量及数组说明2、空间桁架结构有限元分析程序源代码!主程序(读入文件,调用总计算程序,输出结果)CHARACTER IDFUT*20,OUTFUT*20WRITE(*,*) 'Input Data File name:'READ (*,*)IDFUTOPEN (11,FILE=IDFUT,STATUS='OLD')WRITE(*,*) 'Output File name:'READ (*,*)OUTFUTOPEN(12,FILE=OUTFUT,STATUS='UNKNOWN')WRITE(12,*)'*****************************************'WRITE(12,*)'* Program for Analysis of Space Trusses *'WRITE(12,*)'* School of Civil Engineering CSU *'WRITE(12,*)'* 2012.6.25 Designed By MuZhaoxiang *'WRITE(12,*)'*****************************************'WRITE(12,*)' 'WRITE(12,*)'*****************************************'WRITE(12,*)'*************The Input Data****************'WRITE(12,*)'*****************************************'WRITE(12,100)READ(11,*)NF,NP,NE,NM,NR,NCF,NDWRITE(12,110)NF,NP,NE,NM,NR,NCF,ND100 FORMAT(6X,'The General Information'/2X,'NF',5X,'NP',5X,'NE',5X,'NM',5X,'NR',&5X,'NCF',5X,'ND')110 FORMAT(2X,I2,6I7)NPF=NF*NPNDF=ND*NFCALL ANALYSE(NF,NP,NE,NM,NR,NCF,ND,NPF,NDF)END!******************************************************************** !总计算程序SUBROUTINE ANALYSE(NF,NP,NE,NM,NR,NCF,ND,NPF,NDF)DIMENSION X(NP),Y(NP),Z(NP),MM(NE),ME(ND,NE),IT(NF,NP),RR(ND,NR), NAE(NE),&AE(1,2),PF(4,NCF),LMT(NDF,NE),MAXA(NPF),CKK(1000),V(NPF),DIST(NPF),&PP(NPF),FF(NPF),SG(NE),SM(NE)READ(11,*)(X(I),Y(I),Z(I),I=1,NP)READ(11,*)(MM(I),ME(1,I),ME(2,I),NAE(I),I=1,NE)READ(11,*)(RR(1,J),RR(2,J),J=1,NR)READ(11,*)(AE(1,J),J=1,2)WRITE(12,120)WRITE(12,121)(I,X(I),Y(I),Z(I),I=1,NP)WRITE(12,130)WRITE(12,131)(MM(I),ME(1,I),ME(2,I),NAE(I),I=1,NE)WRITE(12,140)WRITE(12,141)(INT(RR(1,J)),RR(2,J),J=1,NR)WRITE(12,150)WRITE(12,151)(AE(1,J),J=1,2)IF(NCF/=0)THENREAD(11,*)((PF(I,J),I=1,4),J=1,NCF)WRITE(12,160)WRITE(12,161)(INT(PF(1,J)),PF(2,J),PF(3,J),PF(4,J),J=1,NCF)ENDIF120 FORMAT(/6X,'The Information of Joints'/2x,'Joint',5X,'X',5X,'Y',5X,'Z') 121 FORMAT(1X,I4,3F8.1)130 FORMAT(/6X,'The Information of Members'/2x,'Member',2X,'START',4X,'END',6X,'NAE')131 FORMAT(1X,I4,3I8)140 FORMAT(/6X,'The Information of SUPPORTS'/2x,'Joint',5X,'S')141 FORMAT(1X,I4,F8.3)150 FORMAT(/6X,'The Information of Sections'/4x,'E0',8X,'A0')151 FORMAT(1X,1PE8.2,F8.4)160 FORMAT(/6X,'The Loading at Joints'/2x,'Joint',5X,'FX',5X,'FY',7X,'FZ') 161 FORMAT(1X,I4,3F8.2)CALL FLMT(NP,NE,NN,NNM,NR,RR,ND,NF,NDF,ME,IT,LMT)CALL FMAXA(NNM,NE,LMT,MAXA,NWK,NPF,NDF)CALL LP(V,PP,IT,PF,NN,NCF,NF,NP,NPF)CALL CONKB(NP,NE,NM,NWK,ME,X,Y,Z,AE,NAE,LMT,MAXA,CKK,NNM)ISH=1CALL LDLT(CKK,MAXA,NN,ISH,IOUT,NWK,NNM)CALL REBACK(CKK,V,MAXA,NN,NWK,NNM)CALL DISPLS(NP,NE,NPF,NM,NN,IT,V,DIST,AE,NAE,X,Y,Z,PP,FF,SG,SM,ME,NR,RR,NF) END!********************************************************************!矩阵转置子程序SUBROUTINE MAT(M,N,A,B)DIMENSION A(M,N),B(N,M) DO I=1,MDO J=1,NB(J,I)=A(I,J)END DOEND DORETURNEND!单元刚度矩阵的形成SUBROUTINE FKE(NP,NE,NM,IE,X,Y,Z,ME,NAE,AE,AKE)DIMENSION X(NP),Y(NP),Z(NP),ME(2,NE),NAE(NE),AE(2,NM) ,AKE(2,2) N1=ME(1,IE)N2=ME(2,IE)X1=X(N1);Y1=Y(N1);Z1=Z(N1)X2=X(N2);Y2=Y(N2);Z2=Z(N2)BL=SQRT((X2-X1)**2+(Y2-Y1)**2+(Z2-Z1)**2)NMI=NAE(IE)E0=AE(1,NMI);A0=AE(2,NMI)C=E0*A0/BLAKE(1,1)=CAKE(1,2)=-CAKE(2,1)=-CAKE(2,2)=CRETURNEND!单元坐标转换矩阵SUBROUTINE FT(IE,NP,NE,X,Y,Z,ME,T)DIMENSION X(NP),Y(NP),Z(NP),ME(2,NE),T(2,6)T=0N1=ME(1,IE);N2=ME(2,IE)X1=X(N1);Y1=Y(N1);Z1=Z(N1)X2=X(N2);Y2=Y(N2);Z2=Z(N2)BL=SQRT((X2-X1)**2+(Y2-Y1)**2+(Z2-Z1)**2)CX=(X2-X1)/BLCY=(Y2-Y1)/BLCZ=(Z2-Z1)/BLT(1,1)=CX;T(2,4)=CXT(1,2)=CY;T(2,5)=CYT(1,3)=CZ;T(2,6)=CZRETURNEND!生成单元了解数组LMTSUBROUTINE FLMT(NP,NE,NN,NNM,NR,RR,ND,NF,NDF,ME,IT,LMT)DIMENSION IT(NF,NP),LMT(NDF,NE),ME(ND,NE),RR(2,NR)NN=0;NNM=0;IT=0;LMT=0N=0DO I=1,NPC=0DO K=1,NRKR=RR(1,K)IF(KR.EQ.I) C=RR(2,K)ENDDONC=C !NC=0,提取了整数部分C=C-NC !C=0.***,例如C=0.111DO J=1,NFC=C*10.0 !例如C=1.21L=C+0.1 !提取C整数部分,例如L=1,即提取了约束RR(2,K)十分位 !上的数字,这里"+0.1"是为了防止四舍五入是出现错误 C=C-LIF(L.EQ.0)THENN=N+1IT(J,I)=NELSEIT(J,I)=0ENDIFENDDOENDDONN=NNNM=NN+1DO IE=1,NEDO I=1,NDNI=ME(I,IE)DO J=1,NFLMT((I-1)*NF+J,IE)=IT(J,NI)ENDDOENDDOENDDORETURNEND!二维总刚中对角线元位置数组SUBROUTINE FMAXA(NNM,NE,LMT,MAXA,NWK,NPF,NDF)DIMENSION MAXA(NPF),LMT(NDF,NE)MAXA=0;NWK=0MAXA(1)=1DO I=2,NNMIP=I-1IG=IPDO IE=1,NEDO J=1,NDFIF(LMT(J,IE).EQ.IP) THENDO K=1,NDFIF(LMT(K,IE).GT.0.AND.LMT(K,IE).LE.IG) IG=LMT(K,IE)ENDDOEND IFENDDOENDDOMAXA(I)= MAXA(I-1)+IP-IG+1ENDDONWK= MAXA(NNM)-1RETURNEND!生成一维存储结构总刚度矩阵SUBROUTINE CONKB(NP,NE,NM,NWK,ME,X,Y,Z,AE,NAE,LMT,MAXA,CKK,NNM)DIMENSION CKK(NWK),X(NP),Y(NP),Z(NP),AE(2,NM),NAE(NE),LMT(6,NE),ME(2,NE),& MAXA(NNM),AK(6,2),AKE(2,2),T(2,6),TT(6,2),TAK(6,6)CKK=0DO 10 IE=1,NETAK=0CALL FKE(NP,NE,NM,IE,X,Y,Z,ME,NAE,AE,AKE)CALL FT(IE,NP,NE,X,Y,Z,ME,T)CALL MAT(2,6,T,TT)AK=MATMUL(TT,AKE)TAK=MATMUL(AK,T) !总体坐标系下的单元刚度矩阵DO 220 I=1,6DO 220 J=1,6NI=LMT(I,IE)NJ=LMT(J,IE)IF((NJ-NI).GE.0.AND.NI*NJ.GT.0) THENIJ=MAXA(NJ)+NJ-NICKK(IJ)=CKK(IJ)+TAK(I,J)ENDIF220 CONTINUE10 CONTINUERETURNEND!生成荷载矩阵SUBROUTINE LP(V,PP,IT,PF,NN,NCF,NF,NP,NPF)DIMENSION V(NN),PP(NPF),IT(NF,NP),PF(4,NCF)V=0PP=0DO I=1,NFDO J=1,NPDO K=1,NCFIF(J.EQ.PF(1,K).AND.IT(I,J).NE.0)THENV(IT(I,J))=PF(I+1,K)ENDDOENDDODO K=1,NCFDO I=1,NPIF(I.EQ.PF(1,K))THENPP(NF*(I-1)+1)=PF(2,K)PP(NF*(I-1)+2)=PF(3,K)PP(NF*(I-1)+3)=PF(4,K)ENDIFENDDOENDDORETURNEND!对一维结构总刚度矩阵进行矩阵分解(LDLT)SUBROUTINE LDLT(A,MAXA,NN,ISH,IOUT,NWK,NNM) DIMENSION A(NWK),MAXA(NNM)IF(NN.EQ.1) RETURNDO 200 N=1,NNKN=MAXA(N)KL=KN+1KU=MAXA(N+1)-1KH=KU-KLIF(KH)304,240,210210 K=N-KHIC=0KLT=KUDO 260 J=1,KHKLT=KLT-1IC=IC+1KI=MAXA(K)ND=MAXA(K+1)-KI-1IF(ND) 260,260,270270 KK=MIN0(IC,ND)C=0.0DO 280 L=1,KK280 C=C+A(KI+L)*A(KLT+L)A(KLT)=A(KLT)-C260 K=K+1240 K=NB=0.0DO 300 KK=KL,KUK=K-1KI=MAXA(K)C=A(KK)/A(KI)IF(ABS(C).LT.1.0E+07) GOTO 290WRITE(IOUT,2010) N,CSTOP290 B=B+C*A(KK)300 A(KK)=CA(KN)=A(KN)-B304 IF(A(KN)) 310,310,200310 IF(ISH.EQ.0) GOTO 320IF(A(KN).EQ.0.0) A(KN)=-1.0E-16GOTO 200320 WRITE(IOUT,2000) N,A(KN)STOP200 CONTINUERETURN2000 FORMAT(//,' Stop-stiffness matrix not positive definite',//,'no positive& pivot for equation',I4,&//,' pivot =',E20.10)2010 FORMAT(//,' Stop-strum sequence check failed + because of multiplier& growth for column &number',I4,//,' Multiplier = ',E20.8)END!回代,求得节点位移SUBROUTINE REBACK(A,V,MAXA,NN,NWK,NNM)DIMENSION A(NWK),V(NN,1),MAXA(NNM)NIP=1DO IP=1,NIPDO 400 N=1,NNKL=MAXA(N)+1KU=MAXA(N+1)-1IF(KU-KL) 400,410,410410 K=NC=0.0DO 420 KK=KL,KUK=K-1420 C=C+A(KK)*V(K,IP)V(N,IP)=V(N,IP)-C400 CONTINUEDO 480 N=1,NNK=MAXA(N)480 V(N,IP)=V(N,IP)/A(K)IF(NN.EQ.1)RETURNN=NNDO 500 L=2,NNKL=MAXA(N)+1KU=MAXA(N+1)-1IF(KU-KL) 500,510,510510 K=NDO 520 KK=KL,KUK=K-1520 V(K,IP)=V(K,IP)-A(KK)*V(N,IP)500 N=N-1ENDDORETURNEND!求解杆件内力、支反力和位移SUBROUTINE DISPLS(NP,NE,NPF,NM,NN,IT,FTOOL,DIST,AE,NAE,X,Y, Z,PP,FF,SG,SM,ME,&NR,RR,NF)DIMENSION IT(3,NP),DIST(NPF),FTOOL(NPF),X(NP),Y(NP),Z(NP),T(2,6),TT(6,2), AE(2,NM),&ME(2,NE),NAE(NE),UE(6),U(2),AKE(2,2),FE1(2),FE(6),FF(NPF),PP(NPF),&SG(NE),SM(NE),FF2(NPF),RR(2,NR),FL(3*NR)SG=0;SM=0;FF=0;FF2=0DO I=1,NPDO J=1,NFLAB=IT(J,I)IF(LAB.EQ.0) THENDIST(3*(I-1)+J)=0.0ELSEIF(B.LE.NN) THENDIST(3*(I-1)+J)=FTOOL(LAB)ENDIFENDDOENDDODO IE=1,NEN1=ME(1,IE);N2=ME(2,IE)DO J=1,NFUE(J)=DIST(3*(N1-1)+J)UE(3+J)=DIST(3*(N2-1)+J)ENDDOCALL FT(IE,NP,NE,X,Y,Z,ME,T)CALL FKE(NP,NE,NM,IE,X,Y,Z,ME,NAE,AE,AKE)U=MATMUL(T,UE)FE1=MATMUL(AKE,U)CALL MAT(2,6,T,TT)FE=MATMUL(TT,FE1)DO J=1,NFFF(3*(N1-1)+J)=FF(3*(N1-1)+J)+FE(J)FF(3*(N2-1)+J)=FF(3*(N2-1)+J)+FE(3+J)ENDDOISW=NAE(IE) AO=AE(2,ISW) SG(IE)=FE1(2)SM(IE)=FE1(2)/AODO I=1,NPFFF2(I)=FF(I)-PP(I)ENDDOENDDODO I=1,NPDO J=1,NFLAB=IT(J,I)IF(LAB.EQ.0)THENK=K+1FL(K)=FF2(3*(I-1)+J)ENDIFENDDOENDDOWRITE(12,*)' 'WRITE(12,*)'****************************************'WRITE(12,*)'*********The Results of Calculation**********'WRITE(12,*)'****************************************'WRITE(12,600)WRITE(12,610)(I,DIST(3*I-2)*1000,DIST(3*I-1)*1000,&DIST(3*I)*1000, I=1,NP)WRITE(12,620)WRITE(12,630)(IE,SG(IE),SM(IE)/1000,IE=1,NE)WRITE(12,640)WRITE(12,650)(INT(RR(1,I)),FL(3*I-2),FL(3*I-1),FL(3*I),I=1,NR)600 FORMAT(6X,'The Joint Displacement'/2x,'Joint',6X,'X(mm)',8X,'Y(mm)',6X,'Z(mm)')610 FORMAT(1X,I4,2X,1P3E12.2)620 FORMAT(//6X,'The Terminal Forces'/2x,'Member', 6X,'FN(kN)',6X,'σ(MPa)') 630 FORMAT(3X,I4,2X,F8.2,6X,F8.2)640 FORMAT(//6X,'The Bearing Force'/2x,'Joint',8X,'X',8X,'Y',8X,'Z')650 FORMAT(2X,I4,2X,3F10.2)RETURNEND3、算例以下图所示空间桁架为例:圆形桁架穹项,其几何尺寸如图(a)所示,整体坐标系原点取在拱顶,集中荷载P作用于拱顶,各杆截面面积A和弹性模量E 都相同(取E=210GPa,A=0.04m2);各杆件及结点编号如图(b)所示。
桁架建筑结构设计方案
桁架建筑结构设计方案桁架结构是一种常见的建筑结构形式,它由一系列的梁和柱组成,通过形成三角形的稳定结构来承载荷载。
桁架结构具有一定的优势和特点,广泛应用于建筑设计中。
本文将介绍桁架结构设计方案,并探讨其特点和应用。
桁架结构设计方案的基本原理是利用三角形的稳定性。
通过将梁和柱组合形成不同形式的三角形结构,可以使结构更加稳定,减少材料的使用量。
桁架结构在构造上有很大的灵活性,可以根据不同的需求进行优化设计,满足不同场所的要求。
桁架结构的设计方案需要考虑以下几个方面。
首先是荷载分析。
根据建筑物的使用要求和地理条件,确定所需承载的重量和力。
结构设计师需要计算荷载的大小和方向,以确定梁柱的位置和尺寸。
其次是结构的形式和材料选择。
桁架结构可以有多种形式,包括平面桁架、空间桁架和曲面桁架等。
根据具体需求和建筑物的形状,选择相应的结构形式。
材料的选择也十分重要,需要考虑材料的强度、稳定性和耐久性等因素。
桁架结构设计方案的特点有很多。
首先是结构的轻量化。
相比于传统的混凝土结构或砖石结构,桁架结构采用金属材料或木材材料,具有更轻的重量。
这使得构造更加便捷,减少了对基础的要求,降低了建设成本。
其次是结构的坚固性。
桁架结构采用三角形的稳定结构,使得整个建筑物能够更好地抵抗外部荷载的作用,具有更好的抗震性能。
同时,桁架结构还具有可拆卸和可移动的特点,方便日后的维护和改造。
桁架结构的应用非常广泛。
在工业建筑中,桁架结构常用于机场、体育馆和仓库等大跨度建筑的设计。
由于桁架结构具有强度高、承载能力大的优势,适合于大跨度结构的设计。
此外,桁架结构还常用于桥梁、塔架和天线等工程项目的建设,能够满足大跨度结构的要求。
在特殊环境下,如地震区域或多风区域,采用桁架结构可以提高建筑物的抗震性能和风力稳定性。
总之,桁架结构设计方案是一种应用广泛的建筑结构形式。
它利用三角形的稳定性和优秀的性能,能够满足不同场所和条件下的建筑需求。
在未来的建筑设计中,桁架结构将继续发挥其独特的优势,为建筑行业做出更大的贡献。
空间桁架焊接结构设计

空间桁架焊接结构设计空间桁架焊接结构设计是航空航天领域的重要内容,其主要适用于火箭发动机、卫星结构、航空器和飞行器等航空产品。
空间桁架焊接结构的设计基于工程力学和材料力学理论,需要精细的计算和设计,以确保其强度和耐久性。
空间桁架焊接结构设计的第一步是确定材料选择和材料性能。
材料的选择应基于其强度、重量和耐腐蚀性等因素。
对于高强度要求的空间桁架,通常使用无缝钢管、铝合金管或碳纤维复合材料。
材料的性能参数包括弹性模量、屈服强度、抗拉强度和断裂韧性等。
这些参数需要精细的测量和计算,并在设计过程中进行更新。
设计的第二步是确定空间桁架的结构布局和几何形状。
空间桁架一般采用三角形结构,因为三角形具有优秀的力学特性,如强度和刚度。
几何形状包括框架节点的位置、框架管道的长度和角度、框架的空间形状等。
这些参数需要满足设计强度和耐久性的要求。
第三步是确定空间桁架的焊接工艺和工作条件。
焊接工艺涉及到焊接类型、焊接电流、电压、焊接速度、气体保护、焊接后处理等因素。
在选择合适的焊接工艺时,应考虑材料类型、工艺条件和安全性等因素。
对于高强度和高精度的空间桁架,应采用自动焊接机器人来实现高质量的焊接。
最后,设计时要考虑实际工作环境和荷载条件。
工作环境包括温度、压力、湿度和辐射等因素。
荷载条件包括静负荷、动负荷、振动等因素。
设计时需要满足这些环境和荷载条件的要求,以确保空间桁架的耐久性和安全性。
综上所述,空间桁架焊接结构设计是一个复杂的过程,需要针对具体的工程项目进行详细的计算和设计。
设计过程需要考虑材料选择、几何形状、焊接工艺和工作环境等因素,并最终确定满足工程要求的数据。
3d3s空间桁架设计步骤 理论说明以及概述
3d3s空间桁架设计步骤理论说明以及概述1. 引言1.1 概述本文将详细介绍3D3S空间桁架设计的步骤、理论说明以及概述。
空间桁架是一种由杆件和节点组成的结构体系,具有轻质、高强度和刚性好等特点,并被广泛应用于建筑工程、航空航天领域以及体育场馆等各个领域。
在本文中,我们将对3D3S空间桁架设计的过程进行深入研究,并探讨其相关的理论知识。
1.2 文章结构本文共分为四个部分。
首先,在引言部分,我们将给出文章的概述,明确文章结构以及研究目的。
然后,在第二部分中,我们将详细介绍3D3S空间桁架设计的步骤,包括确定设计需求、建立初始几何模型以及分析和优化设计。
接下来,在第三部分中,我们将对空间桁架原理进行概述,并介绍与之相关的结构力学基础知识以及桁架结构的特点和应用领域。
最后,在结论部分,我们将总结本文所介绍的设计步骤和理论知识,并展望未来的发展方向。
1.3 目的本文的目的是为读者提供关于3D3S空间桁架设计步骤、理论说明以及概述的全面了解。
通过本文的阐述,读者将能够掌握从确定设计需求到最终优化设计的全过程,并能够理解空间桁架原理以及相关的结构力学基础知识。
同时,本文也旨在激发读者对未来空间桁架设计发展方向的思考,并为相关领域的专业人士提供参考和借鉴。
通过深入研究和探索,我们相信这篇文章将对3D3S空间桁架设计领域有所贡献。
2. 3D3S空间桁架设计步骤:2.1 确定设计需求:在进行3D3S(三维数字结构的静力分析与设计)空间桁架设计之前,需要首先明确设计的具体需求。
这包括结构用途、预期负荷、支撑和连接要求等方面的考虑。
通过确定设计需求,可以为后续的步骤提供清晰的目标和指导。
2.2 建立初始几何模型:在开始详细设计之前,需要建立一个初始的几何模型。
这一步骤包括确定桁架的整体形状、尺寸和布局。
可以使用专业CAD软件或者手工绘图来创建这个初步模型。
2.3 分析和优化设计:接下来是对初始几何模型进行分析和优化。
Fortran语言编写的有限元结构程序
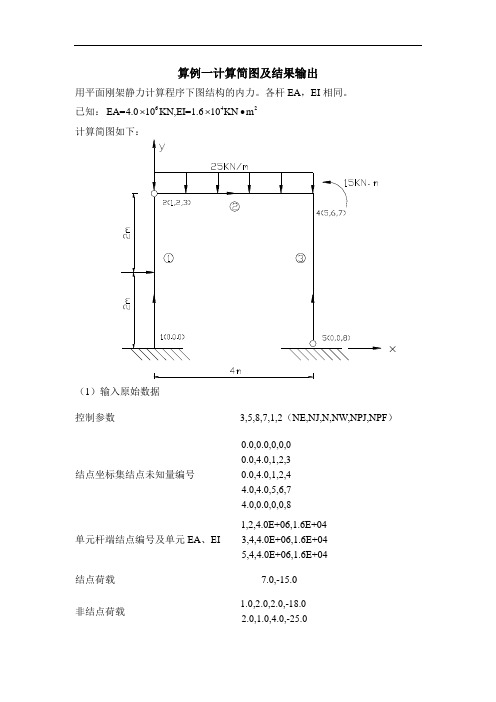
算例一计算简图及结果输出用平面刚架静力计算程序下图结构的内力。
各杆EA,EI相同。
已知:642EA=4.010KN,EI=1.610KN m⨯⨯∙计算简图如下:(1)输入原始数据控制参数3,5,8,7,1,2(NE,NJ,N,NW,NPJ,NPF)结点坐标集结点未知量编号0.0,0.0,0,0 0.0,4.0,1,2,3 0.0,4.0,1,2,4 4.0,4.0,5,6,7 4.0,0.0,0,0,8单元杆端结点编号及单元EA、EI 1,2,4.0E+06,1.6E+04 3,4,4.0E+06,1.6E+04 5,4,4.0E+06,1.6E+04结点荷载7.0,-15.非结点荷载1.0,2.0,2.0,-2.0,1.0,4.0,-25.0(2)输出结果NE= 3 NJ= 5 N= 8 NW= 7 NPJ= 1 NPF= 2 NODE X Y XX YY ZZ1 0.0000 0.0000 0 0 02 0.0000 4.0000 1 2 33 0.0000 4.0000 1 2 44 4.0000 4.000056 75 4.0000 0.0000 0 0 8ELEMENT NODE-I NODE-J EA EI1 12 0.400000E+07 0.160000E+052 3 4 0.400000E+07 0.160000E+053 54 0.400000E+07 0.160000E+05CODE PX-PY-PM7. -15.0000ELEMENT IND A Q1. 2. 2.0000 -18.00002. 1. 4.0000 -25.0000NODE U V CETA1 0.000000E+00 0.000000E+00 0.000000E+002 -0.221743E-02 -0.464619E-04 -0.139404E-023 -0.221743E-02 -0.464619E-04 0.357876E-024 -0.222472E-02 -0.535381E-04 -0.298554E-025 0.000000E+00 0.000000E+00 0.658499E-03ELEMENT N Q M1 N1= 46.4619 Q1= 10.7119 M1= -6.8477N2= -46.4619 Q2= 7.2881 M2= 0.00002 N1= 7.2881 Q1= 46.4619 M1= 0.0000N2= -7.2881 Q2= 53.5381 M2= 14.15233 N1= 53.5381 Q1= 7.2881 M1= 0.0000N2= -53.5381 Q2= -7.2881 M2= -29.1523算例二计算简图及结果输出用平面刚架静力计算程序下图结构的内力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
空间桁架静力分析程序及算例1、变量及数组说明2、空间桁架结构有限元分析程序源代码!主程序(读入文件,调用总计算程序,输出结果)CHARACTER IDFUT*20,OUTFUT*20WRITE(*,*) 'Input Data File name:'READ (*,*)IDFUTOPEN (11,FILE=IDFUT,STATUS='OLD')WRITE(*,*) 'Output File name:'READ (*,*)OUTFUTOPEN(12,FILE=OUTFUT,STATUS='UNKNOWN')WRITE(12,*)'*****************************************'WRITE(12,*)'* Program for Analysis of Space Trusses *'WRITE(12,*)'* School of Civil Engineering CSU *'WRITE(12,*)'* 2012.6.25 Designed By MuZhaoxiang *'WRITE(12,*)'*****************************************'WRITE(12,*)' 'WRITE(12,*)'*****************************************'WRITE(12,*)'*************The Input Data****************'WRITE(12,*)'*****************************************'WRITE(12,100)READ(11,*)NF,NP,NE,NM,NR,NCF,NDWRITE(12,110)NF,NP,NE,NM,NR,NCF,ND100 FORMAT(6X,'The General Information'/2X,'NF',5X,'NP',5X,'NE',5X,'NM',5X,'NR',& 5X,'NCF',5X,'ND')110 FORMAT(2X,I2,6I7)NPF=NF*NPNDF=ND*NFCALL ANALYSE(NF,NP,NE,NM,NR,NCF,ND,NPF,NDF)END!********************************************************************!总计算程序SUBROUTINE ANALYSE(NF,NP,NE,NM,NR,NCF,ND,NPF,NDF)DIMENSION X(NP),Y(NP),Z(NP),MM(NE),ME(ND,NE),IT(NF,NP),RR(ND,NR), NAE(NE),&AE(1,2),PF(4,NCF),LMT(NDF,NE),MAXA(NPF),CKK(1000),V(NPF),DIST(NPF),&PP(NPF),FF(NPF),SG(NE),SM(NE)READ(11,*)(X(I),Y(I),Z(I),I=1,NP)READ(11,*)(MM(I),ME(1,I),ME(2,I),NAE(I),I=1,NE)READ(11,*)(RR(1,J),RR(2,J),J=1,NR)READ(11,*)(AE(1,J),J=1,2)WRITE(12,120)WRITE(12,121)(I,X(I),Y(I),Z(I),I=1,NP)WRITE(12,130)WRITE(12,131)(MM(I),ME(1,I),ME(2,I),NAE(I),I=1,NE)WRITE(12,140)WRITE(12,141)(INT(RR(1,J)),RR(2,J),J=1,NR)WRITE(12,150)WRITE(12,151)(AE(1,J),J=1,2)IF(NCF/=0)THENREAD(11,*)((PF(I,J),I=1,4),J=1,NCF)WRITE(12,160)WRITE(12,161)(INT(PF(1,J)),PF(2,J),PF(3,J),PF(4,J),J=1,NCF)ENDIF120 FORMAT(/6X,'The Information of Joints'/2x,'Joint',5X,'X',5X,'Y',5X,'Z')121 FORMAT(1X,I4,3F8.1)130 FORMAT(/6X,'The Information of Members'/2x,'Member',2X,'START',4X,'END',6X,'NAE')131 FORMAT(1X,I4,3I8)140 FORMAT(/6X,'The Information of SUPPORTS'/2x,'Joint',5X,'S')141 FORMAT(1X,I4,F8.3)150 FORMAT(/6X,'The Information of Sections'/4x,'E0',8X,'A0')151 FORMAT(1X,1PE8.2,F8.4)160 FORMAT(/6X,'The Loading at Joints'/2x,'Joint',5X,'FX',5X,'FY',7X,'FZ')161 FORMAT(1X,I4,3F8.2)CALL FLMT(NP,NE,NN,NNM,NR,RR,ND,NF,NDF,ME,IT,LMT)CALL FMAXA(NNM,NE,LMT,MAXA,NWK,NPF,NDF)CALL LP(V,PP,IT,PF,NN,NCF,NF,NP,NPF)CALL CONKB(NP,NE,NM,NWK,ME,X,Y,Z,AE,NAE,LMT,MAXA,CKK,NNM)ISH=1CALL LDLT(CKK,MAXA,NN,ISH,IOUT,NWK,NNM)CALL REBACK(CKK,V,MAXA,NN,NWK,NNM)CALL DISPLS(NP,NE,NPF,NM,NN,IT,V,DIST,AE,NAE,X,Y,Z,PP,FF,SG,SM,ME,NR,RR,NF)END!********************************************************************!矩阵转置子程序SUBROUTINE MAT(M,N,A,B)DIMENSION A(M,N),B(N,M)DO I=1,MDO J=1,NB(J,I)=A(I,J)END DOEND DORETURNEND!单元刚度矩阵的形成SUBROUTINE FKE(NP,NE,NM,IE,X,Y,Z,ME,NAE,AE,AKE)DIMENSION X(NP),Y(NP),Z(NP),ME(2,NE),NAE(NE),AE(2,NM) ,AKE(2,2) N1=ME(1,IE)N2=ME(2,IE)X1=X(N1);Y1=Y(N1);Z1=Z(N1)X2=X(N2);Y2=Y(N2);Z2=Z(N2)BL=SQRT((X2-X1)**2+(Y2-Y1)**2+(Z2-Z1)**2)NMI=NAE(IE)E0=AE(1,NMI);A0=AE(2,NMI)C=E0*A0/BLAKE(1,1)=CAKE(1,2)=-CAKE(2,1)=-CAKE(2,2)=CRETURNEND!单元坐标转换矩阵SUBROUTINE FT(IE,NP,NE,X,Y,Z,ME,T)DIMENSION X(NP),Y(NP),Z(NP),ME(2,NE),T(2,6)T=0N1=ME(1,IE);N2=ME(2,IE)X1=X(N1);Y1=Y(N1);Z1=Z(N1)X2=X(N2);Y2=Y(N2);Z2=Z(N2)BL=SQRT((X2-X1)**2+(Y2-Y1)**2+(Z2-Z1)**2)CX=(X2-X1)/BLCY=(Y2-Y1)/BLCZ=(Z2-Z1)/BLT(1,1)=CX;T(2,4)=CXT(1,2)=CY;T(2,5)=CYT(1,3)=CZ;T(2,6)=CZRETURNEND!生成单元联系数组LMTSUBROUTINE FLMT(NP,NE,NN,NNM,NR,RR,ND,NF,NDF,ME,IT,LMT)DIMENSION IT(NF,NP),LMT(NDF,NE),ME(ND,NE),RR(2,NR)NN=0;NNM=0;IT=0;LMT=0N=0DO I=1,NPC=0DO K=1,NRKR=RR(1,K)IF(KR.EQ.I) C=RR(2,K)ENDDONC=C !NC=0,提取了整数部分C=C-NC !C=0.***,例如C=0.111DO J=1,NFC=C*10.0 !例如C=1.21L=C+0.1 !提取C整数部分,例如L=1,即提取了约束RR(2,K)十分位 !上的数字,这里"+0.1"是为了防止四舍五入是出现错误 C=C-LIF(L.EQ.0)THENN=N+1IT(J,I)=NELSEIT(J,I)=0ENDIFENDDOENDDONN=NNNM=NN+1DO IE=1,NEDO I=1,NDNI=ME(I,IE)DO J=1,NFLMT((I-1)*NF+J,IE)=IT(J,NI)ENDDOENDDOENDDORETURNEND!二维总刚中对角线元地址数组SUBROUTINE FMAXA(NNM,NE,LMT,MAXA,NWK,NPF,NDF)DIMENSION MAXA(NPF),LMT(NDF,NE)MAXA=0;NWK=0MAXA(1)=1DO I=2,NNMIP=I-1IG=IPDO IE=1,NEDO J=1,NDFIF(LMT(J,IE).EQ.IP) THENDO K=1,NDFIF(LMT(K,IE).GT.0.AND.LMT(K,IE).LE.IG) IG=LMT(K,IE)ENDDOEND IFENDDOENDDOMAXA(I)= MAXA(I-1)+IP-IG+1ENDDONWK= MAXA(NNM)-1RETURNEND!生成一维存储结构总刚度矩阵SUBROUTINE CONKB(NP,NE,NM,NWK,ME,X,Y,Z,AE,NAE,LMT,MAXA,CKK,NNM)DIMENSION CKK(NWK),X(NP),Y(NP),Z(NP),AE(2,NM),NAE(NE),LMT(6,NE),ME(2,NE),& MAXA(NNM),AK(6,2),AKE(2,2),T(2,6),TT(6,2),TAK(6,6)CKK=0DO 10 IE=1,NETAK=0CALL FKE(NP,NE,NM,IE,X,Y,Z,ME,NAE,AE,AKE)CALL FT(IE,NP,NE,X,Y,Z,ME,T)CALL MAT(2,6,T,TT)AK=MATMUL(TT,AKE)TAK=MATMUL(AK,T) !总体坐标系下的单元刚度矩阵DO 220 I=1,6DO 220 J=1,6NI=LMT(I,IE)NJ=LMT(J,IE)IF((NJ-NI).GE.0.AND.NI*NJ.GT.0) THENIJ=MAXA(NJ)+NJ-NICKK(IJ)=CKK(IJ)+TAK(I,J)ENDIF220 CONTINUE10 CONTINUERETURNEND!生成荷载矩阵SUBROUTINE LP(V,PP,IT,PF,NN,NCF,NF,NP,NPF)DIMENSION V(NN),PP(NPF),IT(NF,NP),PF(4,NCF)V=0PP=0DO I=1,NFDO J=1,NPDO K=1,NCFIF(J.EQ.PF(1,K).AND.IT(I,J).NE.0)THENV(IT(I,J))=PF(I+1,K)ENDIFENDDOENDDOENDDODO K=1,NCFDO I=1,NPIF(I.EQ.PF(1,K))THENPP(NF*(I-1)+1)=PF(2,K)PP(NF*(I-1)+2)=PF(3,K)PP(NF*(I-1)+3)=PF(4,K)ENDIFENDDOENDDORETURNEND!对一维结构总刚度矩阵进行矩阵分解(LDLT)SUBROUTINE LDLT(A,MAXA,NN,ISH,IOUT,NWK,NNM) DIMENSION A(NWK),MAXA(NNM)IF(NN.EQ.1) RETURNDO 200 N=1,NNKN=MAXA(N)KL=KN+1KU=MAXA(N+1)-1KH=KU-KLIF(KH)304,240,210210 K=N-KHIC=0KLT=KUDO 260 J=1,KHKLT=KLT-1IC=IC+1KI=MAXA(K)ND=MAXA(K+1)-KI-1IF(ND) 260,260,270270 KK=MIN0(IC,ND)C=0.0DO 280 L=1,KK280 C=C+A(KI+L)*A(KLT+L)A(KLT)=A(KLT)-C260 K=K+1240 K=NB=0.0DO 300 KK=KL,KUK=K-1KI=MAXA(K)C=A(KK)/A(KI)IF(ABS(C).LT.1.0E+07) GOTO 290WRITE(IOUT,2010) N,CSTOP290 B=B+C*A(KK)300 A(KK)=CA(KN)=A(KN)-B304 IF(A(KN)) 310,310,200310 IF(ISH.EQ.0) GOTO 320IF(A(KN).EQ.0.0) A(KN)=-1.0E-16GOTO 200320 WRITE(IOUT,2000) N,A(KN)STOP200 CONTINUERETURN2000 FORMAT(//,' Stop-stiffness matrix not positive definite',//,'no positive& pivot for equation',I4,&//,' pivot =',E20.10)2010 FORMAT(//,' Stop-strum sequence check failed + because of multiplier& growth for column &number',I4,//,' Multiplier = ',E20.8)END!回代,求得节点位移SUBROUTINE REBACK(A,V,MAXA,NN,NWK,NNM)DIMENSION A(NWK),V(NN,1),MAXA(NNM)NIP=1DO IP=1,NIPDO 400 N=1,NNKL=MAXA(N)+1KU=MAXA(N+1)-1IF(KU-KL) 400,410,410410 K=NC=0.0DO 420 KK=KL,KUK=K-1420 C=C+A(KK)*V(K,IP)V(N,IP)=V(N,IP)-C400 CONTINUEDO 480 N=1,NNK=MAXA(N)480 V(N,IP)=V(N,IP)/A(K)IF(NN.EQ.1)RETURNN=NNDO 500 L=2,NNKL=MAXA(N)+1KU=MAXA(N+1)-1IF(KU-KL) 500,510,510510 K=NDO 520 KK=KL,KUK=K-1520 V(K,IP)=V(K,IP)-A(KK)*V(N,IP)500 N=N-1ENDDORETURNEND!求解杆件内力、支反力和位移SUBROUTINE DISPLS(NP,NE,NPF,NM,NN,IT,FTOOL,DIST,AE,NAE,X,Y, Z,PP,FF,SG,SM,ME,&NR,RR,NF)DIMENSION IT(3,NP),DIST(NPF),FTOOL(NPF),X(NP),Y(NP),Z(NP),T(2,6),TT(6,2), AE(2,NM),&ME(2,NE),NAE(NE),UE(6),U(2),AKE(2,2),FE1(2),FE(6),FF(NPF),PP(NPF),&SG(NE),SM(NE),FF2(NPF),RR(2,NR),FL(3*NR)SG=0;SM=0;FF=0;FF2=0DO I=1,NPDO J=1,NFLAB=IT(J,I)IF(LAB.EQ.0) THENDIST(3*(I-1)+J)=0.0ELSEIF(B.LE.NN) THENDIST(3*(I-1)+J)=FTOOL(LAB)ENDIFENDDOENDDODO IE=1,NEN1=ME(1,IE);N2=ME(2,IE)DO J=1,NFUE(J)=DIST(3*(N1-1)+J)UE(3+J)=DIST(3*(N2-1)+J)ENDDOCALL FT(IE,NP,NE,X,Y,Z,ME,T)CALL FKE(NP,NE,NM,IE,X,Y,Z,ME,NAE,AE,AKE)U=MATMUL(T,UE)FE1=MATMUL(AKE,U)CALL MAT(2,6,T,TT)FE=MATMUL(TT,FE1)DO J=1,NFFF(3*(N1-1)+J)=FF(3*(N1-1)+J)+FE(J)FF(3*(N2-1)+J)=FF(3*(N2-1)+J)+FE(3+J)ENDDOISW=NAE(IE)AO=AE(2,ISW)SG(IE)=FE1(2)SM(IE)=FE1(2)/AODO I=1,NPFFF2(I)=FF(I)-PP(I)ENDDOENDDODO I=1,NPDO J=1,NFLAB=IT(J,I)IF(LAB.EQ.0)THENK=K+1FL(K)=FF2(3*(I-1)+J)ENDIFENDDOENDDOWRITE(12,*)' 'WRITE(12,*)'****************************************'WRITE(12,*)'*********The Results of Calculation**********'WRITE(12,*)'****************************************'WRITE(12,600)WRITE(12,610)(I,DIST(3*I-2)*1000,DIST(3*I-1)*1000,&DIST(3*I)*1000, I=1,NP)WRITE(12,620)WRITE(12,630)(IE,SG(IE),SM(IE)/1000,IE=1,NE)WRITE(12,640)WRITE(12,650)(INT(RR(1,I)),FL(3*I-2),FL(3*I-1),FL(3*I),I=1,NR)600 FORMAT(6X,'The Joint Displacement'/2x,'Joint',6X,'X(mm)',8X,'Y(mm)',6X,'Z(mm)') 610 FORMAT(1X,I4,2X,1P3E12.2)620 FORMAT(//6X,'The Terminal Forces'/2x,'Member', 6X,'FN(kN)',6X,'σ(MPa)')630 FORMAT(3X,I4,2X,F8.2,6X,F8.2)640 FORMAT(//6X,'The Bearing Force'/2x,'Joint',8X,'X',8X,'Y',8X,'Z')650 FORMAT(2X,I4,2X,3F10.2)RETURNEND3、算例以下图所示空间桁架为例:圆形桁架穹项,其几何尺寸如图(a)所示,整体坐标系原点取在拱顶,集中荷载P作用于拱顶,各杆截面面积A和弹性模量E都相同(取E=210GPa,A=0.04m2);各杆件及结点编号如图(b)所示。