山武阀门定位器自整定方法
山武定位器调试及故障处理修订稿

山武定位器调试及故障处理WEIHUA system office room 【WEIHUA 16H-WEIHUA WEIHUA8Q8-一、概述气动执行器定位器主要有美国梅索尼兰公司生产的SVI、山武、德国西门子公司生产的MOORE760及SP2系列、费希尔-罗斯蒙特公司生产的DVC6010。
基本上全球主要的定位器生产厂的产品我厂都有使用。
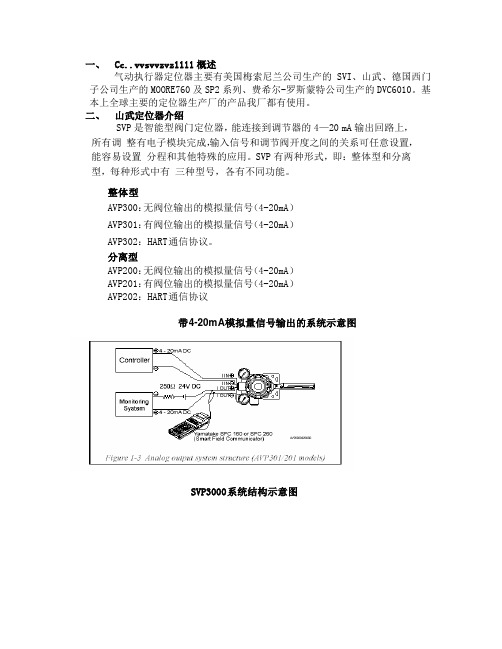
二、山武定位器介绍SVP是智能型阀门定位器,能连接到调节器的4—20mA输出回路上,所有调整有电子模块完成,输入信号和调节阀开度之间的关系可任意设置,能容易设置分程和其他特殊的应用。
SVP有两种形式,即:整体型和分离型,每种形式中有三种型号,各有不同功能。
整体型AVP300:无阀位输出的模拟量信号(4-20mA)AVP301:有阀位输出的模拟量信号(4-20mA)AVP302:HART通信协议。
分离型AVP200:无阀位输出的模拟量信号(4-20mA)AVP201:有阀位输出的模拟量信号(4-20mA)AVP202:HART通信协议带4-20mA 模拟量信号输出的系统示意图SVP3000系统结构示意图SVP有三种组态方法,即:手动旋钮、用SFC手操器、用HART手操器。
手动旋钮组态调整:只用一把螺丝刀就能完成SVP的内部组态,包括自整定、行程调整、调节阀的特性检测、零位/满度的调整。
用SFC手操器组态调整Yamatake SFC160/260型智能通信器能用于SVP的全部参数组态、调整、SVP的维护。
SVP的具体通信功能详见SFC操作手册。
用HART手操器组态调整HART275通讯器能用于AVP302/202型的全部组态、校整、维护。
SVP山武智能定位器适用于直行程和角行程的执行机构,重量约2.5kg。
安装方式与普通定位器相同。
安装步骤:1)先用两只内六角螺钉把安装板固定至SVP上,拧紧螺钉,并把定位器固定于调节阀执行机构上。
2)把执行机构上的反馈销穿进定位器反馈杆开孔内。
山武定位器调试及故障处理

一、概述气动执行器定位器主要有美国梅索尼兰公司生产的SVI、山武、德国西门子公司生产的MOORE760及SP2系列、费希尔-罗斯蒙特公司生产的DVC6010。
基本上全球主要的定位器生产厂的产品我厂都有使用。
二、山武定位器介绍SVP是智能型阀门定位器,能连接到调节器的4—20mA输出回路上,所有调整有电子模块完成,输入信号和调节阀开度之间的关系可任意设置,能容易设置分程和其他特殊的应用。
SVP有两种形式,即:整体型和分离型,每种形式中有三种型号,各有不同功能。
整体型AVP300:无阀位输出的模拟量信号(4-20mA)AVP301:有阀位输出的模拟量信号(4-20mA)AVP302:HART通信协议。
分离型AVP200:无阀位输出的模拟量信号(4-20mA)AVP201:有阀位输出的模拟量信号(4-20mA)AVP202:HART通信协议带4-20mA 模拟量信号输出的系统示意图SVP3000系统结构示意图SVP有三种组态方法,即:手动旋钮、用S FC手操器、用H ART手操器。
手动旋钮组态调整:只用一把螺丝刀就能完成S VP的内部组态,包括自整定、行程调整、调节阀的特性检测、零位/满度的调整。
用S FC手操器组态调整Yamatake SFC160/260型智能通信器能用于S VP的全部参数组态、调整、SVP的维护。
SVP的具体通信功能详见S FC操作手册。
用H ART手操器组态调整HART275通讯器能用于A VP302/202型的全部组态、校整、维护。
SVP 山武智能定位器适用于直行程和角行程的执行机构,重量约2.5kg。
安装方式与普通定位器相同。
安装步骤:1)先用两只内六角螺钉把安装板固定至S VP上,拧紧螺钉,并把定位器固定于调节阀执行机构上。
2)把执行机构上的反馈销穿进定位器反馈杆开孔内。
3)反馈杆与反馈销成90°。
4)反馈杆与S VP本体用两只六角螺栓固定。
保证反馈杆旋转角最大为±20°,如超过角度,SVP不能操作。
日本山武定位器调校方法
山武SVP3000 Alphapluus智能阀门定位器调校方法(一)调整(18MA输入,顺时针旋转开关,保持3秒,就自整定了)2 P2 h4 f$ L: L1 g; G 自动设定是一种独特的程序,可用来自动进行定位器的各种调整。
用开度开关进行自动设定,执行自动设定和零点-量程调整时需要对定位器进行观察。
开度按钮用来启动自动设定和进行手动零点-量程标定,步骤:; C! K# a I [/ y4 J1. 将定位器的输入信号设定为DC 18±1mA;2. 打开SCP的前盖,按住开度按钮到“UP”位置(对于Flowing Rotary VFR阀门为“DOWN”);) w4 t5 f7 C7 p4 m# f3. 按住此按钮,直到阀门开始动作(约3秒),将启动自动设定程序,松开此按钮;4. 阀门从全关到全开往返两次。
之后,阀门开启到50%的位置,并保持3分钟;& T' R, l1 S( B4 U5. 通过改变输入信号确认自动设定程序已经完成。
整个自动设定过程约需3分钟;注:执行自动设定过程中,请勿将输入型号设定到4mA以下。
(只要信号在4-20mA范围内,自动设定过程中改变输入信号不会影响程序的执行。
)如果输入信号跌倒4mA以下,则自动设定将无效,且必须重新开始。
自动设定完成后,信号维持在至少4mA的水平,并至少保持30秒钟,以确保数据和参数被保存到SVP内存中。
操作结束后,通过改变输入信号检查阀门的动作,并确认阀门是否移到与信号相对应的正确位置。
如满度位置发生偏移,再执行满度调整。
! i! Q0 J F9 J& Z5 ^6 J" T( N/ y$ ?(二)零点-量程调整自动设定后,定位器已将其自身标定到阀门的全关(零点)和全开(量程)值。
如果阀门不能获得其开度与定位器控制信号之间的正确关系,则按以下步骤手动调整零点-量程。
& Z' T' \" y: N0 F注:只有关闭和全开输入信号(例:4-20)与储存在定位器中的,或工厂中设定于定位器中的关闭和全开输入信号设定相同,开度开关才会工作。
山武阀门定位器自整定方法(一)

山武阀门定位器自整定方法(一)山武阀门定位器自整定介绍山武阀门定位器自整定是一种用于自动调整阀门位置的技术。
它可以根据流体压力和流量变化,自动调整阀门的开度,以保持设定的流量和压力稳定。
本文将介绍几种实现阀门自整定的方法,并探讨其优缺点。
方法一:PID控制器•使用PID控制器是最常见的阀门自整定方法之一。
PID控制器根据设定的目标值和反馈信号计算出一个控制信号,以驱动阀门开度的调整。
•优点:PID控制器结构简单、调节方便,适用于各种流体控制系统。
•缺点:对于复杂、非线性的控制系统,PID控制器的性能可能不够理想。
方法二:模糊控制器•模糊控制器是一种基于模糊逻辑的控制方法,通过将模糊规则映射到控制输出,实现对阀门开度的自整定。
•优点:模糊控制器对于非线性和模糊的系统具有良好的适应性,能够在复杂的环境中实现较好的控制效果。
•缺点:模糊控制器的规则设计和参数调节相对复杂,需要一定的专业知识和经验。
方法三:自适应控制器•自适应控制器是一种能够根据系统动态特性自动调整控制策略的方法。
它通常采用最小二乘法或者神经网络来估计系统的动态模型。
•优点:自适应控制器能够适应系统参数的变化,具有较高的鲁棒性。
•缺点:自适应控制器通常需要较长的训练时间和较复杂的计算,不适用于所有应用场景。
方法四:模型预测控制器•模型预测控制器是一种基于数学模型的控制方法,通过预测系统未来的状态和输出,优化控制策略。
•优点:模型预测控制器能够通过对未来状态的预测,提前调整控制策略,实现更好的控制效果。
•缺点:模型预测控制器的实现需要精确的系统模型和较大的计算开销。
方法五:遗传算法优化控制•遗传算法优化控制是一种基于进化算法的优化方法,通过不断迭代搜索最优解,实现对阀门开度的自整定。
•优点:遗传算法优化控制能够通过优化目标函数,找到最优的控制策略。
•缺点:遗传算法优化控制的计算复杂度较高,需要一定的计算资源和时间。
总结•选择合适的方法来实现山武阀门定位器的自整定是根据具体的应用场景和要求来确定的。
日本山武定位器调校方法
山武SVP3000 Alphapluus智能阀门定位器调校方法(一)调整(18MA输入,顺时针旋转开关,保持3秒,就自整定了)2 P2 h4 f$ L: L1 g; G 自动设定是一种独特的程序,可用来自动进行定位器的各种调整。
用开度开关进行自动设定,执行自动设定和零点-量程调整时需要对定位器进行观察。
开度按钮用来启动自动设定和进行手动零点-量程标定,步骤:; C! K# a I [/ y4 J1. 将定位器的输入信号设定为DC 18±1mA;2. 打开SCP的前盖,按住开度按钮到“UP”位置(对于Flowing Rotary VFR阀门为“DOWN”);) w4 t5 f7 C7 p4 m# f3. 按住此按钮,直到阀门开始动作(约3秒),将启动自动设定程序,松开此按钮;4. 阀门从全关到全开往返两次。
之后,阀门开启到50%的位置,并保持3分钟;& T' R, l1 S( B4 U5. 通过改变输入信号确认自动设定程序已经完成。
整个自动设定过程约需3分钟;注:执行自动设定过程中,请勿将输入型号设定到4mA以下。
(只要信号在4-20mA范围内,自动设定过程中改变输入信号不会影响程序的执行。
)如果输入信号跌倒4mA以下,则自动设定将无效,且必须重新开始。
自动设定完成后,信号维持在至少4mA的水平,并至少保持30秒钟,以确保数据和参数被保存到SVP内存中。
操作结束后,通过改变输入信号检查阀门的动作,并确认阀门是否移到与信号相对应的正确位置。
如满度位置发生偏移,再执行满度调整。
! i! Q0 J F9 J& Z5 ^6 J" T( N/ y$ ?(二)零点-量程调整自动设定后,定位器已将其自身标定到阀门的全关(零点)和全开(量程)值。
如果阀门不能获得其开度与定位器控制信号之间的正确关系,则按以下步骤手动调整零点-量程。
& Z' T' \" y: N0 F注:只有关闭和全开输入信号(例:4-20)与储存在定位器中的,或工厂中设定于定位器中的关闭和全开输入信号设定相同,开度开关才会工作。
山武阀门定位器AVP80维护篇(一)
自动手动开关可在自动操怍和手动操怍之间更改山武阀门定位器气动输出的控制方法。
1. 自动操作·输\信号对立的气E输出为SVP输出。
2.手动操怍·供气压力直接从阀门定位器输出。
·这允许使用玉力调节强进行手动操怍。
山武阀门定位器滤网更换和节气喷嘴维修维修过程中,可清除累积在SVP节气喷调中的压结空气污染物。
对于压塔空气请使用无清除3um(或更小)固体颗粒的干燥空气。
始终使用十字螺丝刀。
山武阀门定位器具体操作步骤如下1.切断SVP的供气。
2.以A/M开关商标处卸下固定螺丝。
注意)拆卸螺丝时遭注意不要掉落AM开关盖板垫圈和波纹垫圈。
3.需A/M开关切换至MAN(手动)位量。
4.使用摄子或类工具去除夹具卸下旧滤网。
注意)正确理旧夹具和涵。
5.使用铁丝清除节气喷嘴中的污染物。
(直径0.3mm)注意)清楚污染物时请注意不要损坏节气喷嘴。
请不要使用气枪。
请勿使任何油或者油脂污染节气喷嘴。
6.将新滤网缠在A/M开关上,用夹具将它压紧到位。
7.拧紧A/M开关直到旋不动为止。
8.使用固定螺丝得AM开关部分A/M开关盖板一起重新组装。
山武阀门定位器清洁挡板若压缩空气中的污染物积累在挡板上,请按照如下说明清洁挡板。
注意)如果将气压供给SVP,喷嘴背压可能改变,从而导致阀位置可能在清洁挡板时突然改变。
只有在阀门突然移动时没有人员受伤且设备操作不会受到不利影响的情况下方可清洁挡板。
山武阀门定位器操作步骤如下:1.取下盖子。
2.从盖板上卸下四颗螺丝。
3.将盖板滑动到左边,并取下。
4.提供厚度为0.2mm的纸片。
标准名片即可。
5.用纸片清洁EPM喷嘴和挡板之间的污物。
6.清洁间隙后,重新装上盖板和盖子。
山武定位器调试及故障处理
一、Cc..vvsvvzvz1111概述气动执行器定位器主要有美国梅索尼兰公司生产的SVI、山武、德国西门子公司生产的MOORE760及SP2系列、费希尔-罗斯蒙特公司生产的DVC6010。
基本上全球主要的定位器生产厂的产品我厂都有使用。
二、山武定位器介绍SVP是智能型阀门定位器,能连接到调节器的4—20mA输出回路上,所有调整有电子模块完成,输入信号和调节阀开度之间的关系可任意设置,能容易设置分程和其他特殊的应用。
SVP有两种形式,即:整体型和分离型,每种形式中有三种型号,各有不同功能。
整体型AVP300:无阀位输出的模拟量信号(4-20mA)AVP301:有阀位输出的模拟量信号(4-20mA)AVP302:HART通信协议。
分离型AVP200:无阀位输出的模拟量信号(4-20mA)AVP201:有阀位输出的模拟量信号(4-20mA)AVP202:HART通信协议带4-20mA 模拟量信号输出的系统示意图SVP3000系统结构示意图SVP有三种组态方法,即:手动旋钮、用S FC手操器、用H ART手操器。
手动旋钮组态调整:只用一把螺丝刀就能完成S VP的内部组态,包括自整定、行程调整、调节阀的特性检测、零位/满度的调整。
用S FC手操器组态调整Yamatake SFC160/260型智能通信器能用于S VP的全部参数组态、调整、SVP的维护。
SVP的具体通信功能详见S FC操作手册。
用H ART手操器组态调整HART275通讯器能用于A VP302/202型的全部组态、校整、维护。
SVP 山武智能定位器适用于直行程和角行程的执行机构,重量约2.5kg。
安装方式与普通定位器相同。
安装步骤:1)先用两只内六角螺钉把安装板固定至S VP上,拧紧螺钉,并把定位器固定于调节阀执行机构上。
2)把执行机构上的反馈销穿进定位器反馈杆开孔内。
3)反馈杆与反馈销成90°。
4)反馈杆与S VP本体用两只六角螺栓固定。
阀门定位器的整定方法

S VI-II AP 阀门定位器的调校方法三个按钮功能:左侧“* ”按钮:进入或返回当前循环菜单中的参数选项;中间“- ”按钮:向上移动循环菜单的选项或减少当前显示数值;右侧“+ ”按钮:向下移动循环菜单的选项或增加当前显示数值。
正常模式菜单:手动模式菜单:配置菜单:校准菜单:对SVI II AP定位器进行检验、配置和校验步骤如下:1:给SVI II AP 供电并连接显示屏,显示屏上会交替显示输入信号“SIGNAL:”和阀位值“POS:”,此时定位器在正常操作模式下工作。
2:按“*”键进入“正常模式菜单”,按“+”键找到“↓MANUAL”选项按“*”键进入“手动模式菜单”。
3:在“手动模式菜单”下,按“+”键找到“MAN POS”选项按“*”键进入,可以设置几个不同的阀门位置值,检查阀门的动作方式是否正确。
4:在“手动模式菜单”下,按“+”键找到“↓SETUP”选项,按“*”键进入“配置菜单”。
5:在“配置菜单”下,按“+”键找到“↓CONFIG”选项,按“*”键进入参数配置菜单,在此可以修改参数配置信息。
6:在“配置菜单”下,按“+”键找到“↓CALIB”选项,按“*”键进入“校准菜单”。
7:在“校准菜单”下,按“+”键找到“TUNE”选项,按“*”键开始自整定操作,该步骤要进行3 到10分钟,通过使阀门大幅和小幅的移动,来校验出最佳的位置响应;当在自动校验过程时,显示屏上会显示数字消息,表示过程进行中;当自动校验结束时会显示TUNE。
8:按“+”找到“↑SETUP”选项,按“*”回到“配置菜单”;再按“+”找到“↑MANUAL”选项,按“*”回到“手动模式菜单”;再按“+”找到“↑NORMAL”选项,按“*”回到“正常模式菜单”;再按“+”找到“→NORMAL”选项,按“*”回到输入信号与阀位值交替显示画面。
参数配置信息:STOPS:自动校验行程,运行后阀门全行程开关一次;STOP ON:校验阀门开度,可通过“+”、“-”键调整阀门开度;TINE:自动设置动态响应。
山武 SVP3000 Alphaplus 智能阀门定位器 AVP100 102 使用说明书

株式会社山武SVP3000 Alphaplus智能阀门定位器型号:AVP100/102使用说明书CM4-AVP100-20011版:2005年8月参考英文CM2-AVP100-2001 2版型号AVP100/102-SVP3000 Alphaplus智能阀门定位器i前言ii型号AVP100/102-SVP3000 Alphaplus智能阀门定位器前言型号AVP100/102-SVP3000 Alphaplus智能阀门定位器iii目录第一章:前言1-1 : SVP型号.......................................................................................................................................1-1 1-2 : 通信..............................................................................................................................................1-2 1-2-1: 手动通信...............................................................................................................................1-2 1-2-2: 使用现场智能通信装置(SFC)............................................................................................1-2 1-2-3: 使用HART通信装置.............................................................................................................1-2 1-2-4: HART通信装置(用于AVP102型).....................................................................................1-3 1-3 : SVP示意图....................................................................................................................................1-4第二章:安装2-1 : SVP装配.......................................................................................................................................2-3 2-1-1: 安装SVP反馈杆...................................................................................................................2-3 2-2 : SVP安装步骤................................................................................................................................2-5 2-3 : 气源..............................................................................................................................................2-7 2-4 : SVP初始调整................................................................................................................................2-8 2-5 : 电气接线.......................................................................................................................................2-9 2-5-1: 接线原则...............................................................................................................................2-10 2-5-2: 接线步骤...............................................................................................................................2-10 2-6 : 用于无弹簧双作用执行机构的SVP(双作用放大器)...................................................................2-11 2-6-1: 将双作用放大器安装到SVP上..............................................................................................2-12 2-6-2: 不带过滤减压阀直接安装的双作用SVP................................................................................2-13 2-6-3: 将双作用SVP安装到薄膜执行机构上...................................................................................2-14 2-6-4: 将双作用SVP安装到角行程执行机构上...............................................................................2-14 2-6-5: 自动设定...............................................................................................................................2-15第三章:调整3-1 : 自动设定.......................................................................................................................................3-1 3-1-1: 用开度开关进行自动设定....................................................................................................3-2 3-2 : 零点-量程调整.............................................................................................................................3-3 3-3 : 现场智能通信装置.........................................................................................................................3-5 3-4 : SFC键盘操作................................................................................................................................3-6 3-5 : SFC出错.......................................................................................................................................3-6 3-6 : SFC开始通信................................................................................................................................3-6 3-7 : 用现场智能通信装置进行自动设定和零点-量程调整...................................................................3-7 3-8 : 手动SVP设定...............................................................................................................................3-11 3-9 : 用SFC设定控制信号/阀门开度之间的关系.................................................................................3-14 3-9-1: 示例......................................................................................................................................3-15 3-10 : 确认SVP输入信号、EPM输出和阀门开度输出..........................................................................3-18目录第四章:使用HART 通信装置进行配置4-1 : HART 通信装置的功能...................................................................................................................4-24-2 : 启动通信......................................................................................................................................4-44-3 : 确认和修改一般信息.....................................................................................................................4-64-3-1: 设备信息..............................................................................................................................4-64-3-2: 厂商.....................................................................................................................................4-74-4 : 设备条件.......................................................................................................................................4-84-4-1: 电流输入值 (单位:mA )..................................................................................................4-84-4-2: 输入信号% (百分比) 值 (单位:%)...........................................................................4-84-4-3: 阀门开度 (单位:%).......................................................................................................4-84-4-4: 驱动信号(EPM (电-气转换器模块) 驱动信号) (单位:%)......................................4-84-4-5: 温度 (设备内部温度) (单位:℃)...............................................................................4-84-4-6: 上次配置数据......................................................................................................................4-94-5 : 配置和标定(设备设定和标定)..................................................................................................4-104-5-1: Mode (切换SVP 模式)......................................................................................................4-104-5-2: Input signal range (设定电流输入值)................................................................................4-104-5-3: Valve sys config (阀门系统配置)......................................................................................4-114-5-4: Dynamic chara (动态特性)................................................................................................4-124-5-5: Valve chara (阀门特性)....................................................................................................4-144-5-6: Tvl cut off (开度截止).......................................................................................................4-154-5-7: Calibrate (标定)................................................................................................................4-164-5-8: Diag parameters (诊断参数)............................................................................................4-184-5-9: Burst mode (触发模式)......................................................................................................4-254-6 : 初始设定.......................................................................................................................................4-264-7 : Maintenance (维修)..................................................................................................................4-274-7-1: Dummy input sig (仿真输入信号).....................................................................................4-274-7-2: Dummy drive sig (仿真驱动信号)......................................................................................4-274-7-3: User data save (用户数据保存).........................................................................................4-284-7-4: Correct reset (修正复原)....................................................................................................4-284-8 : Device status (设备状态)............................................................................................................4-294-8-1: Failures (故障)...................................................................................................................4-294-8-2: Notices (提示)...................................................................................................................4-294-8-3: Valve diagnostics (阀门诊断).............................................................................................4-30目录第五章:维修5-1 : 自动/手动选择开关......................................................................................................................5-1 5-1-1: A/M开关的结构..................................................................................................................5-1 5-1-2: 操作步骤...............................................................................................................................5-2 5-2 : 滤网更换和节气喷嘴维修..............................................................................................................5-3 5-3 : 清洁挡板.......................................................................................................................................5-4 5-4 : EPM (电-气转换器模块)平衡调整..........................................................................................5-5 5-5 : 绝缘电阻测试................................................................................................................................5-6 5-5-1: 测试步骤...............................................................................................................................5-6 5-5-2: 判定标准...............................................................................................................................5-6 5-6 : 使用带增幅器的SVP时的调整步骤...............................................................................................5-7 5-7 : 默认内部数据值表.........................................................................................................................5-8 5-8 : SVP 内部方框图和SVP I/O流程图.................................................................................................5-9第六章:故障排除6-1 : 故障排除.......................................................................................................................................6-1 6-1-1: 使用SFC...............................................................................................................................6-1 6-1-2: 使用HART通信装置.............................................................................................................6-2 6-1-3: 一般故障排除方法................................................................................................................6-2插图列表图 1-1概况.............................................................................................................................1-1图 1-2山武现场智能通信装置.................................................................................................1-2图 1-3HART 通信结构.............................................................................................................1-3图 1-4SVP 示意图...................................................................................................................1-4图 2-1SVP 反馈杆...................................................................................................................2-3图 2-2SVP 最大动作范围........................................................................................................2-4图 2-3....................................................................................................................................2-4图 2-4....................................................................................................................................2-5图 2-5....................................................................................................................................2-6图 2-6....................................................................................................................................2-7图 2-7....................................................................................................................................2-8图 2-8....................................................................................................................................2-9图 2-9....................................................................................................................................2-11图 2-10双作用放大器已安装到SVP 上.....................................................................................2-12图 2-11不带过滤减压阀直接安装的双作用SVP........................................................................2-13图 3-1....................................................................................................................................3-3图 3-2....................................................................................................................................3-4图 3-3....................................................................................................................................3-14图 3-4....................................................................................................................................3-14图 3-5....................................................................................................................................3-15图 3-6流量特性概况...............................................................................................................3-16图 4-1HART 通信装置.............................................................................................................4-1图 4-2HART 通信结构.............................................................................................................4-5图 4-3.....................................................................................................................................4-15图 4-4强制全开值和强制全关值.............................................................................................4-15图 5-1A/M 开关的结构...........................................................................................................5-1图 5-2从自动(正常)操作状态切换到手动操作状态...........................................................5-2图 5-3从手动操作状态切换到自动操作状态...........................................................................5-2图 5-4A/M 开关......................................................................................................................5-3图 5-5EPM 平衡调整..............................................................................................................5-4图 5-6EPM 平衡调整..............................................................................................................5-5图 5-7SVP 方框图...................................................................................................................5-9图 5-8SVP I/O 流程图.............................................................................................................5-10插图列表各部分说明1-2 :通信有三种与SVP 通信的方法:手动;使用现场智能通信装置(SFC );或使用HART 通信装置。
智能机械6种阀门定位器操作方法及故障说明

智能机械6种阀门定位器操作方法及故障说明智能机械阀门定位器是一种先进的控制设备,可用于对阀门的开关进行自动定位和控制。
以下是关于智能机械阀门定位器的六种操作方法以及常见故障的说明。
操作方法一:定位模式1.将定位模式选择开关设定为“定位”模式。
2.通过操作控制系统或按下设备上的按钮,启动阀门动作。
3.定位器会对阀门进行自动定位,并将准确的位置信息反馈给控制系统。
操作方法二:手动操作1.将定位模式选择开关设定为“手动”模式。
2.手动旋转定位器上的手轮,可以直接控制阀门的开关。
3.手动操作通常用于紧急情况或设备维护。
操作方法三:旁路操作1.将定位模式选择开关设定为“旁路”模式。
2.在该模式下,阀门可以完全绕过定位器,实现手动操作。
3.这种操作方法适用于设备维护或维修期间,需要暂时关闭定位器。
操作方法四:反馈检测1.将定位模式选择开关设定为“反馈”模式。
2.反馈模式下,定位器会检测阀门位置,并将实际位置信息反馈给控制系统。
3.这种操作方法可用于验证阀门位置是否正确,以及对定位器进行校准。
操作方法五:自学习1.将定位模式选择开关设定为“自学习”模式。
2.自学习模式下,定位器会通过对阀门进行多次操作,自动学习并记录阀门的动作曲线和位置信息。
3.这种操作方法可以提高定位器的准确性,并使其能够自动适应不同的阀门特性。
操作方法六:故障排除1.当定位器发生故障时,首先检查供电是否正常,并检查与控制系统之间的连接是否良好。
2.检查阀门是否受阻或损坏,以及定位器的传感器是否正常工作。
3.如果以上排除故障方法无效,可以尝试重启定位器或进行其他维护和修复操作。
智能机械阀门定位器的常见故障包括:1.供电故障,如电源线松动或断开。
2.控制系统故障,如信号传输错误或控制器故障。
3.传感器故障,如位置传感器损坏或失效。
4.阀门受阻,阀门卡死或被异物阻塞。
5.定位器内部机械零件损坏,如齿轮断裂或传动带脱落。
6.环境因素导致的故障,如温度过高或湿度过高导致部件损坏。
AVP100调试方法

AVP3000 Alphaplus 智能阀门定位器AVP100/102型AVP3000 Alphaplus是基于微处理器技术上的智能型电/气阀门定位器。
AVP3000 Alphaplus接受控制器传送的直流信号控制阀门的开度。
除此功能外,AVP3000 Alphaplus具有现场通讯,自动组态、自我诊断功能,极大提高工厂的生产效率。
特点1.调试简单使用简便自动设定自动设定软件是一个全自动的配置程序。
相对于其他品牌定位器,AVP3000不需要其他外围设备就能对执行机构规格进行自动识别,并根据规格自动进行最优化的调整。
对于基本设定AVP3000无需PC机或外围设备,软件通过设定开关自动进行。
现场智能化通讯通过适用山武公司所有现场智能仪表的现场智能通讯器(SFC)能够对AVP进行校准和设定。
2.满足不同应用要求的最优化设定强制全关设定当工艺流程要求阀门强制全关时,AVP通过在某一设定信号位置切断,执行机构不需特殊的供气压力确保阀门完全关闭。
流量特性用户自定义线性、等百分比、快开特性为标准配置,用户还可以通过设定定位器输入/输出特性来更改阀门的流量特性以满足现场工艺要求。
精确的分程设定通过现场智能通讯器(SFC)用户可方便的实现阀门的分程控制(最小设置4mA的量程范围),以满足现场工艺特性要求。
3.高效、合理的维护减少备件由于任何一个规格更改都通过软件设定,AVP减少了备件仓储成本。
阀位反馈监测AVP提供阀位反馈单元作为可选附件,用户可监测到阀门的动作情况以便提早发现问题。
自我诊断AVP提供自我诊断程序,确保快速判断调节阀的故障。
4. 同时适用于单作用/双作用执行机构(双作用功能为可选项)通过反向放大器,AVP可适用双作用执行机构。
内部开关的自整定操作步骤:1、调节过滤减压阀气源至执行结构的额定值,输入18mA ±1 mA的信号到A VP1002、按“UP”键保持3秒钟,直至阀门动作,自整定开始,松开按钮3、阀门知道进行全开-全关来回二次,然后在大约50%开度出稍作停留,作后停留在输入信号(18mA)的开度位置。
阀门定位器的调校方法

阀门定位器的调校方法气动薄膜调节阀在我厂得到很广泛的应用,而阀门定位器作为气动薄膜调节阀的辅助工具,对调节阀的使用起着决定性作用,定位器调校质量的好坏直接影响调节阀的使用,从而会影响到工艺的生产操作。
而阀门定位器的调校作为仪表工必须掌握的一项技能,掌握好定位器的校验方法不但可保证定位器的调校质量,而且能节省大量的工作量。
但我们所常用的调校方法有时并不能起作用,很难将调节阀校准。
因此,我们要对常规的校验法进行分析和改进,找出一种更有效的校验法。
1.阀门定位器的工作原理和系统结构1.1工作原理阀门定位器是按力矩平衡原理工作的。
如正作用的气动薄膜阀,来自调节器或输出式安全栅的4~20mA直流信号输入到转换组件中的线圈时,由于线圈两侧各有一块极性方向相同的永久磁铁,所以线圈产生的磁场与永久磁铁的恒定磁场,共同作用在线圈中间的可动铁芯即阀杆上,使杠杆产生位移。
当输入信号增加时,杠杆向下运动(作逆时针偏转),固定在杠杆上的挡板便靠近喷嘴,使放大器背压增高,经放大后输出气压也随之增高。
此输出气压作用在调节阀的膜头上,使调节阀的阀杆向下运动。
阀杆的位移通过拉杆转换为反馈轴和反馈压板的角位移,并通过调量程支点作用于反馈弹簧上,该弹簧被拉伸,产生一个反馈力矩,使杠杆作顺时针偏转,当反馈力矩和电磁力矩相平衡时,阀杆就稳定于某一位置,从而实现了阀杆位移与输入信号电流成正比例的关系。
调整调量程支点于适当位置,可以满足调节阀不同杆行程的要求。
1.2系统结构阀门定位器与阀门配套使用,组成一个闭合控制回路的系统。
该系统主要由磁电组件、零位弹簧、挡板、气动功率放大器、调节阀、反馈杠杆、量程调节机构、反馈弹簧组成。
其系统方框图如图1所示。
图1阀门定位器和调节阀系统方框图I–输入电流;H–调零弹簧长度;M1-输入电流所产生的电磁力矩;M o-零位弹簧所产生的调零点力矩;M f-反馈弹簧所产生的反馈力矩;h-挡板微小位移;P-气动功率放大器的输出压力;L-调节阀的行程为了分析的方便,我们假设阀门定位器为线性的,则在一般情况下,各环节均可近似为线性环节,那么系统的方框图如图2所示。
几种常见阀门定位器的调校方法
几种常见阀门定位器的调校方法阀门定位器概述 (1)电-气阀门定位器VP200(横河)的调校说明 (2)智能阀门定位器 AVP系列(山武)调校说明 (3)智能阀门定位器 SIEMENS(西门子)调校说明 (7)智能阀门定位器DVC系列(费希尔)调试说明 (27)一、阀门定位器概述:阀门定位器:是调节阀的主要附件,通常与气动调节阀配套使用,它接受调节器的输出信号,然后以它的输出信号去控制气动调节阀,当调节阀动作后,阀杆的位移又通过机械装置反馈到阀门定位器,阀位状况通过电信号传给上位系统。
一般可分为以下三种:气动阀门定位:此阀门定位器无电路部分,一般和电-气转换器配合使用,才能实现自动控制功能。
比如Pignone(化肥装置尿素单元PV-1026)、PARCOL(化肥装置尿素单元PV-1026),由于其无法单独实现自动控制,气路繁琐,控制精度低等缺点,逐渐被淘汰。
电-气阀门定位:由于其价格低廉,调校方便,输出稳定等特点,目前仍被广泛使用。
比如VP200(合成氨装置甲醇洗单元和液氮洗单元)等。
智能阀门定位:是目前使用最为广泛的阀门定位器,控制过程中利用智能阀门定位器可实现高品质调节,增加过程控制的精确性和稳定性。
比如SIEMENS、DVC2000-6000系列、AVP100-300系列等。
二、电-气阀门定位器VP200(横河)的调校步骤:1、检查气路、电路是否满足定位器工作要求;2、给定12mA信号,将反馈杆调整至水平位置,并紧固;3、给定8mA信号,通过零位调节螺母将零位调节至对应值;4、给定16mA信号,通过量程调节螺母将量程调节至对应值;5、给定4mA信号,检查阀门全关位置,必要时进行微调;6、给定20mA信号,检查阀门全开位置;必要时进行微调;7、给定4mA(或20mA)、8mA(或16mA)、12mA、4mA(或 20mA)、16mA(或8mA)、20mA(或4mA)进行刻度验证,必要时进行微调。
山武阀门定位器自整定方法

山武阀门定位器自整定方法
山武阀门定位器是一种用于控制阀门运动的高精度定位器,广泛应用于航空航天、化工、石油、电力等领域。
自整定方法是山武阀门定位器中的一种重要技术,可以帮助用户实现对阀门的定位控制。
具体来说,山武阀门定位器的自整定方法包括以下步骤:
1. 确定阀门的初始位置和目标位置,通常通过手动或自动执行器进行定位。
2. 计算山武阀门定位器的输出信号,通常通过软件算法进行计算。
3. 根据输出信号进行阀门的控制,直到达到目标位置。
在自整定过程中,需要注意以下几个问题:
1. 初始位置和目标位置的选择需要根据阀门的特性和运动规律进行优化。
2. 计算算法需要根据阀门的特性和运动规律进行优化,以确保输出信号的准确性。
3. 自整定方法需要根据实际情况进行多次迭代,直到达到理想的定位精度。
自整定方法是山武阀门定位器中的一种重要技术,可以帮助用户实现对阀门的定位控制。
在实际应用中,需要注意算法的优化和迭代次数的控制,以提高定位精度和稳定性。
19智能调节阀(山武-DE协议)

山武智能调节阀(AVP300)的基本调校方法一、自动校准过程步骤:1.把通讯器(SFC)与定位器正确连线后,上电,屏幕显示LOOP IN MANUAL?2.按ENTER键,屏幕显示PRESS ID。
3.按ID键,屏幕显示SVP TAG NO.(位号)。
4.此时按CONF键,进入组态选项,在组态选项中,用NEXT键或PREV键翻动选项。
5.选择MAINTE MODE(维护模式),按ENTER键进入。
6.用NEXT键选择AUTO SETUP(自动设置)项。
7.按ENTER键确认,屏幕显示ARE YOU SURE!?8.再按ENTER键确认,调节阀将会自动调校完成。
注:1 在自动调校前,阀门定位器的输入应为18mA.2 阀的自动调校过程约需3分钟,阀将开关两次然后回到50%的位置停留一段 时间,当阀位回到正常位置时,说明调校结束。
二、智能通讯器主菜单组态流程步骤:①调节阀上电,将山武调节阀专用通讯器(SFC)与定位器正确连线,按ID键,将显示其位号.②按CONF键进入组态画面.按NEXT或PREV键选择A--G项,按ENTER键进入各选项.(A)系统基本设置1.执行机构作用形式2.定位器作用形式3.阀体作用形式4.执行机构类型尺寸5.滞后程度选择6.PID数据打印7.数据存储步骤: ①进入系统基本设置菜单后,按NEXT 或PREV 键选择1--7项.②在1--5项中,按MEMU 键选择各项设置,按ENTER 键确认.(B)动态数据设置步骤:此项只有当(A)-4项选择PARAM 0时才可设置.按数字键输入适当P、I、D 参数即可.(C)流量特性设置步骤:进入流量特性设置菜单后,按MEMU 键在LINEAR (线性)、QUICK OPEN (快开)、EQUAL%(等百分比)、USER (用户自定义)中任选其一,按ENTER 键确认。
(D)用户流量特性数据此项只有当(C)项中选择USER (用户自定义)时才能设置。
山武智能阀门定位器
LWT
配置
1. 输入控制信号 2. 输出特性 3. 阀门动作 4. 定位器动作
以下为 SVP 各个可配置参数的默认和任选设定值
除非特别指明,否则智能阀门定位器将在出厂时采用如下配置
4 至 20 mA
用户自设范围的最小量程 = 4 mA
ห้องสมุดไป่ตู้
线性
EQ 或 QO 可由用户在订购时说明或自设。
正作用 (阀芯在阀座上方)
输出特性 • 线性、等百分比、快开 • 用户自设特性 (16 点)
供气压力 140 至 700 kPa (1.4 至 7.0 kgf/cm²)
空气消耗
4 l(N)/ 分钟 (140 kPa (1.4 kgf/cm²)时的最大值) 5 l(N)/ 分钟 (280 kPa (2.8 kgf/cm²)时的最大值) 6 l(N)/ 分钟 (500 kPa (5.0 kgf/cm²)时的最大值) 10 l(N)/ 分钟 (400 kPa (4.0 kgf/cm²)时的最大值,
AVP102 型产品的 NEPSI (国家级仪器仪表防爆安全 监督检验站)本质安全许可
Ex ia IIC T4-T6
-40°C 至 +60°C 时为 T4
-40°C 至 +60°C 时为 T5
-40°C 至 +40°C 时为 T6
证书编号:GYJ04236
安全栅应为 NEPSI (国家级仪器仪表防爆安全监督
反作用 (阀芯在阀座下方)可由用户在订购时说明或自设。
正作用
位置应向后,与上面对齐。
4
No. SS4-AVP100-0100 (1 版 )
尺 寸
⌠Ꮥ
⌠Ꮥ
ࢄѼ喚mm
䓂⅃阜ܩ ᣔऒ
阀门定位器简易操作步骤(有用)

阀门定位器简易操作步骤
一、山武定位器
1、设定调试阀门指令87.5%或12.5%;
2、到就地,在定位器上用一字螺丝刀按下调整按钮并旋转,保持直至阀门动作;
3、松开调整按钮,等待调整结束。
二、西门子定位器
1、按方式键5秒以上,进入组态方式,松开手指。
2、点按方式键,切换到下一个组态参数,找到第4个参数INITA;
3、按+键5秒以上,初始化开始;
4、等待阀门自动调整,大约10分钟后,显示FINSH;
5、点击方式键,然后长按方式键5秒以上,退出组态方式;
6、此时定位器在手动模式,点击方式键,定位器切换到自动模式。
三、ABB定位器
1、按MODE键5秒,直到出现“ADJ_LIN”;
2、松开MODE键;
3、再按住MODE键,直到显示器上计数器倒计数到0;
4、松开MODE键,自动调整程序开始运行;
5、自动调整程序运行大约5分钟,顺利结束后定位器自动存储调节参数,并自动切换
控制方式到:1.1 CTRL_FIX。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
山武阀门定位器自整定方法
标题:山武阀门定位器自整定方法
正文:
阀门定位器是一种用于控制阀门位置的传感器,通常用于自动化控制系统中。
阀门定位器的主要功能是将输入信号转换成精确的阀门位置输出,以确保阀门在正确的位置进行关闭或开启。
山武阀门定位器是一种常见的阀门定位器品牌,其自整定方法被广泛应用于各种自动化系统中。
自整定方法是指利用阀门定位器的特性,通过调整自身的参数来实现对阀门定位器的自动控制。
以下是山武阀门定位器的自整定方法及其拓展:
1. 确定输入信号类型
在山武阀门定位器的自整定过程中,首先需要确定输入信号的类型。
例如,
对于线性阀门定位器,输入信号应为线性信号;对于非线性阀门定位器,输入信号应为非线性信号。
2. 确定自整定范围
自整定方法通常包括两个步骤:一是确定自整定范围,二是确定自整定值。
确定自整定范围是指在确定输入信号类型后,阀门定位器所能输出的精确位置范围。
确定自整定值是指在确定自整定范围后,通过调整阀门定位器的参数,使其输出
位置在自整定范围内。
3. 分析自整定过程
山武阀门定位器的自整定过程通常包括两个步骤:一是输入信号的预处理,
二是输出信号的处理。
输入信号的预处理是指在确定输入信号类型后,对输入信
号进行滤波、去噪等处理,以提高阀门定位器的精度;输出信号的处理是指在确定自整定范围后,通过调整阀门定位器的参数,使其输出信号在自整定范围内。
4. 优化自整定方法
随着技术的发展,阀门定位器的参数调整方式也在不断优化。
例如,可以采用自适应方法、神经网络方法等,以优化自整定方法。