山武定位器的安装及校准
山武定位器调试及故障处理修订稿

山武定位器调试及故障处理WEIHUA system office room 【WEIHUA 16H-WEIHUA WEIHUA8Q8-一、概述气动执行器定位器主要有美国梅索尼兰公司生产的SVI、山武、德国西门子公司生产的MOORE760及SP2系列、费希尔-罗斯蒙特公司生产的DVC6010。
基本上全球主要的定位器生产厂的产品我厂都有使用。
二、山武定位器介绍SVP是智能型阀门定位器,能连接到调节器的4—20mA输出回路上,所有调整有电子模块完成,输入信号和调节阀开度之间的关系可任意设置,能容易设置分程和其他特殊的应用。
SVP有两种形式,即:整体型和分离型,每种形式中有三种型号,各有不同功能。
整体型AVP300:无阀位输出的模拟量信号(4-20mA)AVP301:有阀位输出的模拟量信号(4-20mA)AVP302:HART通信协议。
分离型AVP200:无阀位输出的模拟量信号(4-20mA)AVP201:有阀位输出的模拟量信号(4-20mA)AVP202:HART通信协议带4-20mA 模拟量信号输出的系统示意图SVP3000系统结构示意图SVP有三种组态方法,即:手动旋钮、用SFC手操器、用HART手操器。
手动旋钮组态调整:只用一把螺丝刀就能完成SVP的内部组态,包括自整定、行程调整、调节阀的特性检测、零位/满度的调整。
用SFC手操器组态调整Yamatake SFC160/260型智能通信器能用于SVP的全部参数组态、调整、SVP的维护。
SVP的具体通信功能详见SFC操作手册。
用HART手操器组态调整HART275通讯器能用于AVP302/202型的全部组态、校整、维护。
SVP山武智能定位器适用于直行程和角行程的执行机构,重量约2.5kg。
安装方式与普通定位器相同。
安装步骤:1)先用两只内六角螺钉把安装板固定至SVP上,拧紧螺钉,并把定位器固定于调节阀执行机构上。
2)把执行机构上的反馈销穿进定位器反馈杆开孔内。
日本山武定位器调校方法
山武SVP3000 Alphapluus智能阀门定位器调校方法(一)调整(18MA输入,顺时针旋转开关,保持3秒,就自整定了)2 P2 h4 f$ L: L1 g; G 自动设定是一种独特的程序,可用来自动进行定位器的各种调整。
用开度开关进行自动设定,执行自动设定和零点-量程调整时需要对定位器进行观察。
开度按钮用来启动自动设定和进行手动零点-量程标定,步骤:; C! K# a I [/ y4 J1. 将定位器的输入信号设定为DC 18±1mA;2. 打开SCP的前盖,按住开度按钮到“UP”位置(对于Flowing Rotary VFR阀门为“DOWN”);) w4 t5 f7 C7 p4 m# f3. 按住此按钮,直到阀门开始动作(约3秒),将启动自动设定程序,松开此按钮;4. 阀门从全关到全开往返两次。
之后,阀门开启到50%的位置,并保持3分钟;& T' R, l1 S( B4 U5. 通过改变输入信号确认自动设定程序已经完成。
整个自动设定过程约需3分钟;注:执行自动设定过程中,请勿将输入型号设定到4mA以下。
(只要信号在4-20mA范围内,自动设定过程中改变输入信号不会影响程序的执行。
)如果输入信号跌倒4mA以下,则自动设定将无效,且必须重新开始。
自动设定完成后,信号维持在至少4mA的水平,并至少保持30秒钟,以确保数据和参数被保存到SVP内存中。
操作结束后,通过改变输入信号检查阀门的动作,并确认阀门是否移到与信号相对应的正确位置。
如满度位置发生偏移,再执行满度调整。
! i! Q0 J F9 J& Z5 ^6 J" T( N/ y$ ?(二)零点-量程调整自动设定后,定位器已将其自身标定到阀门的全关(零点)和全开(量程)值。
如果阀门不能获得其开度与定位器控制信号之间的正确关系,则按以下步骤手动调整零点-量程。
& Z' T' \" y: N0 F注:只有关闭和全开输入信号(例:4-20)与储存在定位器中的,或工厂中设定于定位器中的关闭和全开输入信号设定相同,开度开关才会工作。
山武阀门定位器自整定方法
山武阀门定位器自整定方法
标题:山武阀门定位器自整定方法
正文:
阀门定位器是一种用于控制阀门位置的传感器,通常用于自动化控制系统中。
阀门定位器的主要功能是将输入信号转换成精确的阀门位置输出,以确保阀门在正确的位置进行关闭或开启。
山武阀门定位器是一种常见的阀门定位器品牌,其自整定方法被广泛应用于各种自动化系统中。
自整定方法是指利用阀门定位器的特性,通过调整自身的参数来实现对阀门定位器的自动控制。
以下是山武阀门定位器的自整定方法及其拓展:
1. 确定输入信号类型
在山武阀门定位器的自整定过程中,首先需要确定输入信号的类型。
例如,
对于线性阀门定位器,输入信号应为线性信号;对于非线性阀门定位器,输入信号应为非线性信号。
2. 确定自整定范围
自整定方法通常包括两个步骤:一是确定自整定范围,二是确定自整定值。
确定自整定范围是指在确定输入信号类型后,阀门定位器所能输出的精确位置范围。
确定自整定值是指在确定自整定范围后,通过调整阀门定位器的参数,使其输出
位置在自整定范围内。
3. 分析自整定过程
山武阀门定位器的自整定过程通常包括两个步骤:一是输入信号的预处理,
二是输出信号的处理。
输入信号的预处理是指在确定输入信号类型后,对输入信
号进行滤波、去噪等处理,以提高阀门定位器的精度;输出信号的处理是指在确定自整定范围后,通过调整阀门定位器的参数,使其输出信号在自整定范围内。
4. 优化自整定方法
随着技术的发展,阀门定位器的参数调整方式也在不断优化。
例如,可以采用自适应方法、神经网络方法等,以优化自整定方法。
AVP100定位器使用说明书

第二章:智能阀门定位器的安装
2-1 :SVP 安装....................................................................................................... 2-3 2-1-1 :安装 SVP 反馈杆.............................................................................. 2-3 2-1-2 :SVP安装步骤................................................................................... ... 2-4 2-2 :SVP 组装....................................................................................................... 2-5 2-3 :供气............................................................................................................... 2-6 2-4 : SVP 初始调节............................................................................................... 2-7 2-5 :接线............................................................................................................... 2-8 2-5-1 :接线图.............................................................................................. 2-9 2-5-2 :接线步骤........................................................................................... 2-9 2-6 :安装在无弹簧执行机构上的双作用定位器(双作用继动器)......................... 2-10 2-6-1 :双作用继动器的安装......................................................................... 2-11 2-6-2 :无过滤减压阀定位器的双作用继动器直接安装.................................... 2-12 2-6-3 :将双作用定位器安装在直行程执行机构上......................................... 2-13 2-6-4 :将双作用定位器安装在角行程执行机构上 .......................................... 2-13 2-6-5 :自动整定........................................................................................... 2-14
山武阀门定位器自整定方法(一)

山武阀门定位器自整定方法(一)山武阀门定位器自整定介绍山武阀门定位器自整定是一种用于自动调整阀门位置的技术。
它可以根据流体压力和流量变化,自动调整阀门的开度,以保持设定的流量和压力稳定。
本文将介绍几种实现阀门自整定的方法,并探讨其优缺点。
方法一:PID控制器•使用PID控制器是最常见的阀门自整定方法之一。
PID控制器根据设定的目标值和反馈信号计算出一个控制信号,以驱动阀门开度的调整。
•优点:PID控制器结构简单、调节方便,适用于各种流体控制系统。
•缺点:对于复杂、非线性的控制系统,PID控制器的性能可能不够理想。
方法二:模糊控制器•模糊控制器是一种基于模糊逻辑的控制方法,通过将模糊规则映射到控制输出,实现对阀门开度的自整定。
•优点:模糊控制器对于非线性和模糊的系统具有良好的适应性,能够在复杂的环境中实现较好的控制效果。
•缺点:模糊控制器的规则设计和参数调节相对复杂,需要一定的专业知识和经验。
方法三:自适应控制器•自适应控制器是一种能够根据系统动态特性自动调整控制策略的方法。
它通常采用最小二乘法或者神经网络来估计系统的动态模型。
•优点:自适应控制器能够适应系统参数的变化,具有较高的鲁棒性。
•缺点:自适应控制器通常需要较长的训练时间和较复杂的计算,不适用于所有应用场景。
方法四:模型预测控制器•模型预测控制器是一种基于数学模型的控制方法,通过预测系统未来的状态和输出,优化控制策略。
•优点:模型预测控制器能够通过对未来状态的预测,提前调整控制策略,实现更好的控制效果。
•缺点:模型预测控制器的实现需要精确的系统模型和较大的计算开销。
方法五:遗传算法优化控制•遗传算法优化控制是一种基于进化算法的优化方法,通过不断迭代搜索最优解,实现对阀门开度的自整定。
•优点:遗传算法优化控制能够通过优化目标函数,找到最优的控制策略。
•缺点:遗传算法优化控制的计算复杂度较高,需要一定的计算资源和时间。
总结•选择合适的方法来实现山武阀门定位器的自整定是根据具体的应用场景和要求来确定的。
日本山武定位器调校方法
山武SVP3000 Alphapluus智能阀门定位器调校方法(一)调整(18MA输入,顺时针旋转开关,保持3秒,就自整定了)2 P2 h4 f$ L: L1 g; G 自动设定是一种独特的程序,可用来自动进行定位器的各种调整。
用开度开关进行自动设定,执行自动设定和零点-量程调整时需要对定位器进行观察。
开度按钮用来启动自动设定和进行手动零点-量程标定,步骤:; C! K# a I [/ y4 J1. 将定位器的输入信号设定为DC 18±1mA;2. 打开SCP的前盖,按住开度按钮到“UP”位置(对于Flowing Rotary VFR阀门为“DOWN”);) w4 t5 f7 C7 p4 m# f3. 按住此按钮,直到阀门开始动作(约3秒),将启动自动设定程序,松开此按钮;4. 阀门从全关到全开往返两次。
之后,阀门开启到50%的位置,并保持3分钟;& T' R, l1 S( B4 U5. 通过改变输入信号确认自动设定程序已经完成。
整个自动设定过程约需3分钟;注:执行自动设定过程中,请勿将输入型号设定到4mA以下。
(只要信号在4-20mA范围内,自动设定过程中改变输入信号不会影响程序的执行。
)如果输入信号跌倒4mA以下,则自动设定将无效,且必须重新开始。
自动设定完成后,信号维持在至少4mA的水平,并至少保持30秒钟,以确保数据和参数被保存到SVP内存中。
操作结束后,通过改变输入信号检查阀门的动作,并确认阀门是否移到与信号相对应的正确位置。
如满度位置发生偏移,再执行满度调整。
! i! Q0 J F9 J& Z5 ^6 J" T( N/ y$ ?(二)零点-量程调整自动设定后,定位器已将其自身标定到阀门的全关(零点)和全开(量程)值。
如果阀门不能获得其开度与定位器控制信号之间的正确关系,则按以下步骤手动调整零点-量程。
& Z' T' \" y: N0 F注:只有关闭和全开输入信号(例:4-20)与储存在定位器中的,或工厂中设定于定位器中的关闭和全开输入信号设定相同,开度开关才会工作。
山武定位器
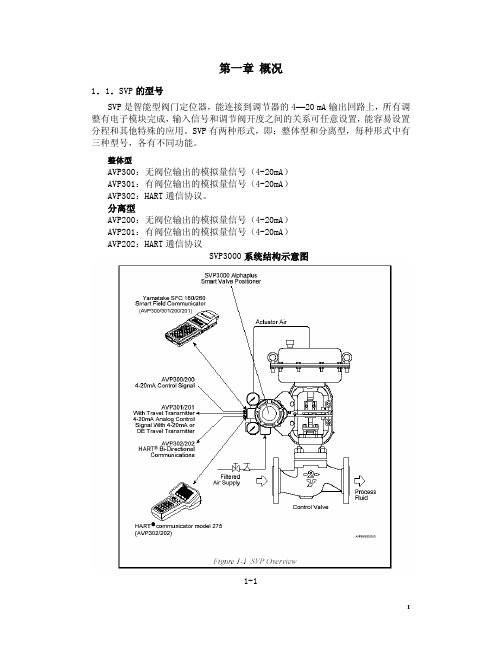
第一章概况1.1.SVP的型号SVP是智能型阀门定位器,能连接到调节器的4—20 mA输出回路上,所有调整有电子模块完成,输入信号和调节阀开度之间的关系可任意设置,能容易设置分程和其他特殊的应用。
SVP有两种形式,即:整体型和分离型,每种形式中有三种型号,各有不同功能。
整体型AVP300:无阀位输出的模拟量信号(4-20mA)AVP301:有阀位输出的模拟量信号(4-20mA)AVP302:HART通信协议。
分离型AVP200:无阀位输出的模拟量信号(4-20mA)AVP201:有阀位输出的模拟量信号(4-20mA)AVP202:HART通信协议SVP3000系统结构示意图1-11.2.系统结构无阀位输出的定位器。
(型号:AVP300和AVP200)无阀位输出的系统示意图1-2有阀位输出的定位器(型号:AVP301和AVP201)模拟量输出:SVP模拟量信号直接输出到监控系统。
带4-20mA模拟量信号输出的系统示意图1-31.3.组态SVP有三种组态方法,即:手动旋钮、用SFC手操器、用HART手操器。
手动旋钮组态调整:只用一把螺丝刀就能完成SVP的内部组态,包括自整定、行程调整、调节阀的特性检测、零位/满度的调整。
用SFC手操器组态调整Yamatake SFC160/260型智能通信器能用于SVP的全部参数组态、调整、SVP的维护。
SVP的具体通信功能详见SFC操作手册。
用HART手操器组态调整HART275通讯器能用于AVP302/202型的全部组态、校整、维护。
SVP具体通信功能详见HART通信器操作手册1.4.SVP的结构和功能主要组成部分整体型(AVP300/301/302)1-7主要部件名称和功能主要部件一览表部件说明本体电子控制模块、EPM(电气转换模块)、VTD(阀位传感器)气动放大器放大来自EPM的气信号,经转换后输入到执行机构反馈杆把开度信号传送至VTD手/自动开关在手动和自动之间进行气信号输出的切换外部零位/满度调整开关在不用SFC的情况下,用一把螺丝刀能完成零位满度的调整和各参数的自动整定气源压力表指示供气压力输出气源压力表指示输出气源压力安装支架(任选)不同型号的执行机构有不同形式气源输入口供气气源连接至“SUP”接口输出气源口与执行机构气源入口相连双作用放大器在双作用执行机构上使用,双作用放大器连接在SVP的输出口,它有两个输出,OUT1是SVP输出气源,OUT2是压力平衡气源,分别与双气缸的两个气源口相连,使气缸活塞处于一定位置阀位检测器通过反馈杆传送阀位反馈电缆连接VTD和SVP本体第二章安装2.1.安装要求1)环境温度范围:根据防爆要求2)相对湿度: 10%--90%3)安装处温度和湿度无剧烈变化4)电磁场:≤400A/m(避免附近有大变压器,高频炉等)5)振动低于19.6m/s2(5—400Hz) (AVP300/301和AVP200/201本体)6)振动低于98m/s2(5—2000Hz) (AVP200/201阀位检测器)2.2.整体型SVP的安装(A VP300/301/302)山武智能定位器适用于直行程和角行程的执行机构,重量约2.5kg。
山武阀门定位器AVP80维护篇(一)
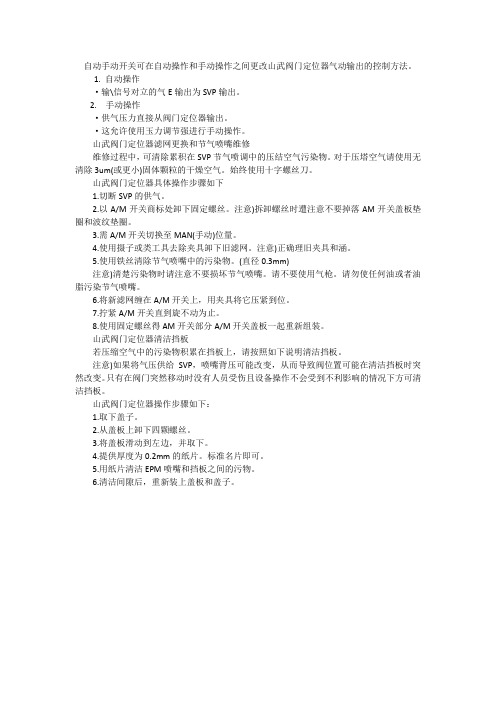
自动手动开关可在自动操怍和手动操怍之间更改山武阀门定位器气动输出的控制方法。
1. 自动操作·输\信号对立的气E输出为SVP输出。
2.手动操怍·供气压力直接从阀门定位器输出。
·这允许使用玉力调节强进行手动操怍。
山武阀门定位器滤网更换和节气喷嘴维修维修过程中,可清除累积在SVP节气喷调中的压结空气污染物。
对于压塔空气请使用无清除3um(或更小)固体颗粒的干燥空气。
始终使用十字螺丝刀。
山武阀门定位器具体操作步骤如下1.切断SVP的供气。
2.以A/M开关商标处卸下固定螺丝。
注意)拆卸螺丝时遭注意不要掉落AM开关盖板垫圈和波纹垫圈。
3.需A/M开关切换至MAN(手动)位量。
4.使用摄子或类工具去除夹具卸下旧滤网。
注意)正确理旧夹具和涵。
5.使用铁丝清除节气喷嘴中的污染物。
(直径0.3mm)注意)清楚污染物时请注意不要损坏节气喷嘴。
请不要使用气枪。
请勿使任何油或者油脂污染节气喷嘴。
6.将新滤网缠在A/M开关上,用夹具将它压紧到位。
7.拧紧A/M开关直到旋不动为止。
8.使用固定螺丝得AM开关部分A/M开关盖板一起重新组装。
山武阀门定位器清洁挡板若压缩空气中的污染物积累在挡板上,请按照如下说明清洁挡板。
注意)如果将气压供给SVP,喷嘴背压可能改变,从而导致阀位置可能在清洁挡板时突然改变。
只有在阀门突然移动时没有人员受伤且设备操作不会受到不利影响的情况下方可清洁挡板。
山武阀门定位器操作步骤如下:1.取下盖子。
2.从盖板上卸下四颗螺丝。
3.将盖板滑动到左边,并取下。
4.提供厚度为0.2mm的纸片。
标准名片即可。
5.用纸片清洁EPM喷嘴和挡板之间的污物。
6.清洁间隙后,重新装上盖板和盖子。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
山武定位器的安装及校准
1、山武定位器安装
1.1、工作原理:
山武AVP100/102是智能型阀门定位器,可根据不同执行器,适用于直行程和角行程的执行机构。
执行机构的运动带动AVP100/102定位器的反馈轴转动,从而带动位置传感器(VTD)旋转检测出阀位并由电器转换模块(EPM)转换成电信号(4~20mA)。
该电信号与控制室送来的输入信号(4~20mA)由电子模块完成。
电子模块将这些数值通过精确的运算计算出偏差,根据偏差优化运算并输出到驱动模块,由驱动模块直接控制调节阀的开度,以达到准确定位的目的。
1.2、山武AVP100/102定位器的安装:
1、一般AVP安装:
(1)、先用两只内六角螺钉把安装板固定在AVP上,拧紧螺钉,并把定位器固定到调节阀执行机构上。
(2)、把执行机构上的反馈销穿定位器反馈杆开孔内。
(3)、反馈杆与反馈销成90度。
(4)、反馈杆与AVP本体用两只内六角螺栓固定。
保证反馈杆旋转角最大为±20度,如超过角度,AVP不能正常工作。
(5)、在大执行机构上使用延长形反馈杆。
(6)、连接气源管,下端为进气口,上端为输出气源口(与执行机构膜头相连)。
连接号气源后在将定位器内的手/自动切换螺钉用螺丝刀向左旋转至水平位,切换至手动。
(7)、调节过滤减压阀,使阀门开度到50%,调节反馈销位置,使反馈杆成水平(阀开度为50%),固定反馈销(这一步主要确保供气与反馈杆初始位置的对应关系),切换手/自动螺钉于自动位置。
(8)、在直行程的执行机构上,旋转角度为±20度;如超过角度,需延长反馈杆。
2、双作用AVP安装:
(1)、安装双作用放大器于AVP的输出口。
(2)、输入气源至双作用放大器“SUP”口。
(3)、双作用放大器的“QUT1”与执行机构的主气缸相连。
(4)、双作用放大器的“QUT2”与执行机构的副气缸相连。
注意!手/自动切换开关在双作用智能定位器不起作用。
2、山武AVP100/102定位器的调试:
2.1、内部开关的整定:
(1)、调节过滤减压阀气源至执行机构的额定值,输入18mA±1mA的信号到AVP.
(2)、按“UP”键,保持月3秒钟,直至阀门动作,自整定开始,松开按钮。
(3)、阀门自动进行全开-全关来回二次,然后在大约50%开度处稍作停留,最终停留在对应输入信号(18mA)的开度位置。
整个过程大约3分钟。
(4)、改变输入信号后,核对阀开度,自整定完成。
(5)、当自整定在进行时,若输入信号低于4mA,自整定中断,必须重新自整定。
自整定完成后,保持输入信号4mA以上至少30秒,才能把自整定参数自动保存在AVP中。
(6)、当自整定期间,若连接SFC手操器(注意正负极)于AVP上,按SFC手操器的ID键,就能在SFC的液晶屏上显示自整定参数。
2.2、零位-满度调整:
AVP具有手动零位-满度调整的功能。
当无SFC手操器时或在防爆现场不能使用手操器时,该功能是非常有效的。
调整方法:
按“UP”键,反馈杆向上(阀杆向上)。
按“DOWN”键,反馈杆向下(阀杆向下)。
零位调整:
输入4mA信号,检查零点,若有偏差,按“UP”或“DOWN”键,使零点到合适位置(按“UP”键,阀芯向上移动,按“DOWN”键,阀芯向下移动)。
输入20mA信号,检查满度,若有偏差,按“UP”或“DOWN”键,使满度到合适位置(按“UP”键,阀芯向上移动,按“DOWN”键,阀芯向下移动)。
阀开度确认
分别输入4mA、8mA、16mA、20mA检查阀开度,若有偏差或阀门震荡,再进行一次自整定,就能完成整个过程的调试。
注意!
在一下情况下,常规自整定将无法执行,需改用SFC手操器进行自整定:
阀门的执行机构小于阿自倍儿公司的HAI执行机构(膜头容量<850cm3)
阀门的行程小于14.3mm。