最新高维多目标进化算法总结
多目标进化算法综述电子教案

多目标进化算法综述电子教案一、引言多目标优化问题是指在决策者有多个目标的情况下,同时寻找多个最优解的问题。
与传统的单目标优化问题相比,多目标优化问题更复杂,因为不同目标之间可能存在冲突,无法简单地将它们转化为单目标问题进行求解。
多目标进化算法(Multi-Objective Evolutionary Algorithm,MOEA)是一类应用于解决多目标优化问题的算法。
本文将对多目标进化算法进行综述。
二、多目标进化算法的基本原理多目标进化算法是一种基于自然进化的元启发式优化算法,其基本原理是模拟自然界的生物进化过程,通过不断进化来逼近多个最优解。
多目标进化算法的基本步骤包括初始化种群、适应度评估、选择操作、交叉操作和变异操作,以及终止条件判断。
在多目标进化算法中,每个解决方案用一个染色体表示,染色体上的每个基因对应一个决策变量的取值。
种群中的每个个体是一个解决方案,通过不断进化,种群中的个体分布在目标空间的帕累托前沿上,代表了多个最优解。
选择操作根据个体在目标空间的分布情况筛选出优秀的个体,交叉和变异操作则产生新的解决方案,继承和引入种群中的优秀特征。
终止条件可以是迭代次数达到一定限制或者目标空间的帕累托前沿收敛到稳定状态。
三、常见的多目标进化算法1.NSGA-II算法NSGA-II(Non-Dominated Sorting Genetic Algorithm II)是一种经典的多目标进化算法。
该算法通过非支配排序和拥挤度距离两个步骤进行个体的选择,以促进种群的多样性。
非支配排序将个体划分为不同的等级,拥塞度距离用于评估个体在目标空间中的分布情况。
2.SPEA2算法SPEA2(Strength Pareto Evolutionary Algorithm 2)是另一种经典的多目标进化算法。
该算法通过计算个体在目标空间中的适应度值来选择优秀的个体。
适应度值包括个体在被支配次数方面的评估和个体之间的拥挤度距离。
多目标进化算法性能评价指标综述
多目标进化算法性能评价指标综述多目标进化算法(MOEA)是一种用于解决多目标优化问题的进化算法。
MOEA通过维护一个个体群体的集合,通过交叉、变异等操作,逐步搜索问题的解空间,以得到一组尽可能好的近似最优解,这些解在不同的目标函数下优化结果良好且彼此之间具有一定的均衡性。
对于多目标进化算法的性能评价,主要包括以下几个方面的指标。
1. 近似最优解集合的质量这是最重要的评价指标之一,主要用于衡量算法是否能够找到一组高质量的非劣解。
在多目标优化问题中,解空间通常非常大,因此算法找到的解集可能只是非劣解的一个近似。
质量好的近似最优解集合应该尽可能接近真正的非劣解集合,并且集合中的解之间应该有较好的均衡性。
2. 支配关系的准确性多目标优化问题中的解往往是通过支配关系进行判断的。
一个解A支配另一个解B,意味着解A在所有目标函数上至少和解B一样好,且在某一个目标函数上更好。
算法找到的解集应该能够正确地判断出解之间的支配关系,并保持非劣解之间的支配关系不变。
3. 外部收敛集的覆盖度外部收敛集是算法找到的近似最优解集合,其覆盖度是衡量算法性能的重要指标之一。
覆盖度越高,说明算法找到的近似最优解集合能够尽可能覆盖真实的非劣解集合。
覆盖度的计算通常通过指标如hypervolume、inverted generational distance等进行。
4. 多样性多样性指的是找到的近似最优解集合中解之间的差异程度。
一方面,算法应该找到尽可能多样的解,以保证搜索过程能够覆盖解空间的各个方向。
解之间应该具有一定的距离,以避免近似最优解集合中过于集中在某个区域。
5. 计算效率和收敛速度算法的计算效率和收敛速度也是评价指标之一。
虽然算法能够找到高质量的近似最优解集合,但如果计算时间过长,就会限制算法的实际应用。
算法应该在保证质量的前提下,尽可能提高计算速度和效率。
多目标进化算法的性能评价指标主要包括近似最优解集合的质量、支配关系的准确性、外部收敛集的覆盖度、多样性以及计算效率和收敛速度。
多目标进化算法总结

MOGAi x 是第t 代种群中个体,其rank 值定义为:()(,)1t i i rank x t p =+()t i p 为第t 代种群中所有支配i x 的个体数目适应值(fitness value )分配算法:1、 将所有个体依照rank 值大小排序分类;2、 利用插值函数给所有个体分配适应值(从rank1到rank *n N ≤),一般采用线性函数3、 适应值共享:rank 值相同的个体拥有相同的适应值,保证后期选择时同一rank 值的个体概率相同最后采用共享适应值随机选取的方法选择个体进入下一代一种改进的排序机制(ranking scheme ): 向量,1,(,,)a a a q y y y =⋅⋅⋅和,1,(,,)b b b q y y y =⋅⋅⋅比较 goal vector :()1,,q g g g =⋅⋅⋅ 分为以下三种情况: 1、()(),,1,,1; 1,,;1,,; a i i a j j k q i k j k q y g y g ∃=⋅⋅⋅-∀=⋅⋅⋅∀=+⋅⋅⋅>∧≤2、(),1,,; a i i i q y g ∀=⋅⋅⋅>当a y 支配b y 时,选择a y 3、(),1,,; a j j j q y g ∀=⋅⋅⋅≤ 当b y 支配a y 时,选择b y优点:算法思想容易,效率优良 缺点:算法容易受到小生境的大小影响 理论上给出了参数share σ的计算方法NPGA基本思想: 1、初始化种群Pop2、锦标赛选择机制:随机选取两个个体1x 和2x 和一个Pop 的 子集CS(Comparison Set)做参照系。
若1x 被CS 中不少于一 个个体支配,而2x 没有被CS 中任一个体支配,则选择2x 。
3、其他情况一律称为死结(Tie ),采用适应度共享机制选择。
个体适应度:i f小生境计数(Niche Count ):(),i j Popm Sh d i j ∈=⎡⎤⎣⎦∑共享函数:1-,()0,share shareshare d d Sh d d σσσ⎧≤⎪=⎨⎪>⎩共享适应度(the shared fitness ):iif m选择共享适应度较大的个体进入下一代优点:能够快速找到一些好的非支配最优解域 能够维持一个较长的种群更新期 缺点:需要设置共享参数需要选择一个适当的锦标赛机制限制了该算法的实际应用效果NPGA II基本思想: 1、初始化种群Pop2、Pareto 排序:非支配个体rank=0;其余个体 rank=支配该个体的个体数目3、锦标赛选择机制:种群中任选两个个体1x 和2x , 若()()12rank x rank x <,则选择1x ; 若是()()12rank x rank x =,称为死结(Tie ), 采用适应度共享机制选择。
多目标进化算法性能评价指标综述
多目标进化算法性能评价指标综述多目标进化算法是一类用于解决多目标优化问题的进化算法。
与传统的单目标优化算法不同,多目标进化算法试图在多个目标函数之间寻找一组非支配解,即无法通过改善一个目标函数而同时改善其他目标函数的解。
基于多目标进化算法的优化方法已经在许多领域得到了广泛应用,如工程设计、车辆路径规划、机器学习等。
多目标进化算法的性能评价是在解决多目标优化问题时评估算法优劣的重要指标。
这些指标可以分为两类,一类是与解集的多样性相关的指标,另一类是与解集的收敛性相关的指标。
与解集的多样性相关的指标可以反映多目标进化算法搜索到的解的多样性和分布情况。
常见的指标包括解集的帕累托前沿覆盖率、解集的帕累托前沿距离、解集的均匀度等。
帕累托前沿覆盖率是指算法搜索到的解集中包含的真实帕累托前沿上的解的比例。
解集的帕累托前沿距离是指算法搜索到的解集中各个解与真实帕累托前沿的平均距离,可以用来评估解集的分布情况。
解集的均匀度指标可以用来评估解集中解的分布是否均匀,常见的均匀度指标包括解集的熵和解集的均匀度指标。
除了上述的指标,还有一些其他的指标可以用来评价多目标进化算法的性能,如解集的虚拟耗散度指标、解集的相对距离指标以及解集的多样性指标等。
这些指标可以综合考虑解集的多样性和收敛性,提供对多目标进化算法的全面评价。
多目标进化算法的性能评价指标涵盖了解集的多样性和收敛性两个方面,可以用来评估算法搜索过程中解集的质量和搜索效果。
在实际应用中,根据具体问题的特点和要求,选择适合的性能评价指标可以帮助研究人员更好地理解算法的优劣,并进行算法的改进和优化。
多目标进化算法性能评价指标综述

多目标进化算法性能评价指标综述
多目标进化算法是解决多目标优化问题的常用方法之一。
与传统的单目标优化问题不同,多目标优化问题涉及到多个冲突的目标函数。
因此,评价多目标进化算法的性能需要
考虑到多个方面,如收敛性、多样性、图形展示等。
本文将对多目标进化算法性能评价指
标进行综述。
1. 收敛性
收敛性是指算法在解空间寻找到尽可能优秀的解的能力。
对于多目标进化算法,应该
评价其收敛到 Pareto 前沿(即非支配解集)的速度和精度。
收敛速度的评价用收敛时间
和收敛代数等指标,收敛精度的评价用各项目标函数的均方误差、均值差异和 Pareto 距
离等指标。
2. 多样性
多样性是指算法能够产生多样性的解的能力。
在多目标进化算法中,多样性评价是解
集内解之间的多样性,一些指标能够评价解集的多样性,如平均距离、稀疏度、覆盖率等。
评价算法多样性的目的是确保算法能够在解集中覆盖尽可能多的高质量解,以克服可能存
在的局部最优解问题。
3. 结构
结构是指算法在生成解集时是否充分利用了解空间的结构信息,例如,是否产生了多
个互不相连的解集。
这个结构信息可以通过一些图形展示的指标来评价,例如 Pareto 前
沿的形状和密度、拓扑结构等。
4. 算法复杂度
算法复杂度是指多目标进化算法的计算量和运行时间。
与收敛性和多样性不同,算法
复杂度不是解的指标,而是算法效率的指标。
综上所述,多目标进化算法性能评价指标包括收敛性、多样性、结构和算法复杂度等。
在实际应用中,这些指标应该根据具体的问题和需求进行选择和使用。
多目标进化算法

多目标进化算法
多目标进化算法是基于进化计算的搜索算法,用于求解多目标优化问题,它模仿自然进化过程,以改进个体的适应度进行进化。
多目标进化算法通过精心设计的表示和进化策略来解决多目标优化问题,有效地探索多目标空间,以准确地表征多目标最优解(Pareto 最优解),因此在工程实践中被越来越广泛地应用。
多目标进化算法主要由以下步骤组成:
1、初始化种群:随机生成若干种群个体,作为初始种群,用于分析求解问题。
2、进化:基于进化规则,使用遗传算子改变当前种群,产生新一代种群。
3、评价:评估当前种群中每个个体的多目标函数适应度。
4、多目标选择:从最优种群中进行择优选择,得到Pareto最优解。
5、重复:将上述进化过程重复多次,至全局最优解。
目前,多目标进化算法已经被广泛应用于各种工程实践中,在服务器负载平衡、自适应控制、系统性能调优、工业机器人位置分配等领域都实现了良好的优化效果。
未来,多目标进化算法将会进一步改进,可以应用于更大规模和复杂环境中,以更准确地寻找最佳可行解决方案。
多目标优化和进化算法

多目标优化和进化算法
多目标优化(Multi-Objective Optimization,简称MOO)是指在优化问题中存在多个目标函数需要同时优化的情况。
在实际问题中,往往存在多个目标之间相互制约、冲突的情况,因此需要寻找一种方法来平衡这些目标,得到一组最优解,这就是MOO的研究范畴。
进化算法(Evolutionary Algorithm,简称EA)是一类基于生物进化原理的优化算法,其基本思想是通过模拟进化过程来搜索最优解。
进化算法最初是由荷兰学者Holland于1975年提出的,随后经过不断的发展和完善,已经成为了一种重要的优化算法。
在实际应用中,MOO和EA经常被结合起来使用,形成了一种被称为多目标进化算法(Multi-Objective Evolutionary Algorithm,简称MOEA)的优化方法。
MOEA通过模拟生物进化过程,利用选择、交叉和变异等操作来生成新的解,并通过多目标评价函数来评估每个解的优劣。
MOEA能够在多个目标之间进行平衡,得到一组最优解,从而为实际问题提供了有效的解决方案。
MOEA的发展历程可以追溯到20世纪80年代初,最早的研究成果是由美国学者Goldberg和Deb等人提出的NSGA(Non-dominated Sorting Genetic Algorithm),该算法通过非支配排序和拥挤度距离来保持种群的多样性,从而得到一组最优解。
随后,又出现了许多基于NSGA的改进算法,如NSGA-II、
MOEA/D、SPEA等。
总之,MOO和EA是两个独立的研究领域,但它们的结合产生了MOEA这一新的研究方向。
MOEA已经在许多领域得到了广泛应用,如工程设计、决策分析、金融投资等。
多目标进化算法总结

多目标进化算法总结多目标进化算法(MOEA, Multiple Objective Evolutionary Algorithm)是一类基于进化算法的优化方法,主要用于解决具有多个相互竞争的目标函数的问题。
MOEA通过维护一组解的种群,采用进化操作来尽可能多的帕累托最优解集。
下面对MOEA进行详细总结。
首先,MOEA的基本思想是通过模拟自然进化过程进行优化,它借鉴了进化生物学中的适应度、交叉、突变等概念。
MOEA维护了一个种群,每个个体代表一个解,种群中的个体通过进化操作进行迭代更新。
在进化过程中,MOEA通过交叉和突变操作生成新的个体,通过适应度评估来决定个体的生存能力,根据个体在不同目标函数上的性能对种群进行选择和更新。
其次,MOEA的核心是解的评估和解的选择。
MOEA采用一个适应度函数来评估解在多个目标函数上的性能。
适应度函数一般采用拥挤度或距离等概念来度量解的优劣。
拥挤度是指解在种群中的分布密度,用以保持解的多样性。
根据适应度函数的评估结果,MOEA决定哪些解会生存下来,并更新种群。
第三,MOEA有很多具体的算法实现,其中比较经典的有NSGA-II、PAES、SPEA、MOEA/D等。
NSGA-II采用非支配排序和拥挤度距离来维护种群的多样性,并通过交叉和突变操作来生成新的个体。
PAES通过局部来改进解的质量,采用网格来表示解的空间,并根据适应度函数进行迁移。
SPEA使用非支配排序和密度估计来选择解,并通过交叉和突变操作来生成新的个体。
MOEA/D通过将多目标优化问题分解为多个子问题,并通过子问题之间的协作来帕累托最优解。
此外,MOEA还面临一些挑战和改进方向。
首先,MOEA需要解决多目标函数之间的冲突,如何在多个目标之间找到均衡点是一个难题。
其次,MOEA的计算复杂度通常比单目标优化方法更高,如何提高算法的效率是一个重要问题。
此外,MOEA在处理约束问题和高维问题时也存在挑战,如何有效处理这些问题也是一个改进方向。
转贴:多目标进化算法的性能指标总结(一)
转贴:多⽬标进化算法的性能指标总结(⼀)⼀、指标的常见分类⽅法:1.考虑指标同时能评估的解集数⽬(1个或2个解集),可将指标分为⼀元和⼆元指标。
⼀元指标:接受⼀个解集作为参数进⾏评估。
⼆元指标:接受两个解集作为参数,通过⽐较两个解集的⽀配关系或其他⽅⾯,给出哪个解集更好的判断。
2.多⽬标进化算法解集的性能评价指标主要分为三个⽅⾯:1)解集的收敛性评价(convergence), 反映解集与真实Pareto前沿之间的逼近程度(距离)。
⼀般我们希望所得解集距离PF尽可能近。
2)解集的均匀性评价(uniformity / evenness), 体现解集中个体分布的均匀程度。
⼀般我们希望所得解集在PF上分布尽可能均匀。
3)解集的⼴泛性评价(spread), 反映整个解集在⽬标空间中分布的⼴泛程度。
⼀般我们希望所得解集在PF上分布尽可能⼴、尽可能完整地表达PF。
也有⼀些学者,不这样分类,分为基数指标,收敛性指标,和多样性/分布性指标,认为多样性包括均匀性(evenness)和⼴泛性/范围(spread),具体如下:1)基数指标:评估解集中存在的解的个数。
2)收敛性指标(精确度指标):评估解集到理论帕累托最优前沿的距离(逼近程度)。
3)多样性指标:包括评估解集分布的均匀性(evenness)和⼴泛性/范围(spread)。
均匀性体现解集中个体分布的均匀程度;⼴泛性反映整个解集在⽬标空间中分布的⼴泛程度。
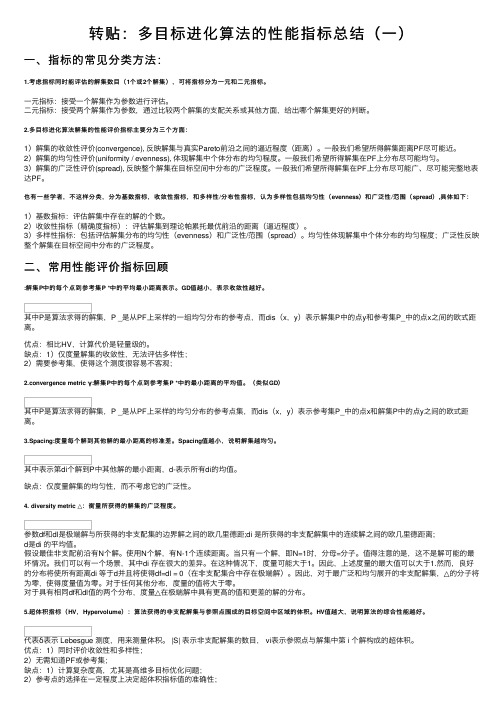
⼆、常⽤性能评价指标回顾:解集P中的每个点到参考集P *中的平均最⼩距离表⽰。
GD值越⼩,表⽰收敛性越好。
其中P是算法求得的解集,P _是从PF上采样的⼀组均匀分布的参考点,⽽dis(x,y)表⽰解集P中的点y和参考集P_中的点x之间的欧式距离。
优点:相⽐HV,计算代价是轻量级的。
缺点:1)仅度量解集的收敛性,⽆法评估多样性;2)需要参考集,使得这个测度很容易不客观;2.convergence metric γ:解集P中的每个点到参考集P *中的最⼩距离的平均值。
多目标进化算法
多目标进化算法
多目标进化算法(MOEA)是一种智能优化技术,用于解决带有多个目标的复杂优化问题。
它与单目标优化算法最大的不同在于,它可以同时优化多个目标函数。
多目标进化算法的设计主要集中在三个方面:种群初始化,适应度函数设计和更新策略。
种群初始化是多目标进化算法的第一步,它决定了多目标优化算法的初始状态。
在多目标优化算法中,一般采用随机策略来初始化种群。
具体而言,可以使用随机数发生器随机生成一组数据,并根据优化问题的要求,确定这些数据是否符合要求,然后将其作为种群的初始解。
适应度函数是多目标优化算法的核心,它负责对种群中每个个体进行评估,从而实现有效的进化。
多目标优化算法可以根据不同的优化目标设计不同的适应度函数,以更好地评估种群中每个个体的拟合度。
最后,多目标进化算法的更新策略是它的核心,它通过改变种群中每个个体的属性,使种群的整体质量得到改善。
多目标进化算法的更新策略可以采用相互作用策略,例如交叉、变异、选择等,以改善种群的整体质量。
总而言之,多目标进化算法是一种用于解决带有多个目标的复杂优
化问题的智能优化技术,它的设计集中在种群初始化、适应度函数设计和更新策略三个方面。
多目标进化算法的应用范围很广,它可以用于控制、计算机视觉、机器学习、模糊控制等领域。
多目标进化算法性能评价指标综述

多目标进化算法性能评价指标综述多目标进化算法(Multi-objective Evolutionary Algorithms,MOEAs)是一类优化算法,用于解决具有多个目标函数的多目标优化问题。
MOEAs在解决多目标优化问题上具有很强的适应性和鲁棒性,并在许多领域有着广泛的应用。
为了评价MOEAs的性能,人们提出了许多指标。
这些指标可以分为两类:一类是针对解集的评价指标,另一类是针对算法的评价指标。
首先,针对解集的评价指标主要用于从集合的角度评价解集的性能。
常见的解集评价指标有:1. Pareto前沿指标:衡量解集的覆盖度和质量。
Pareto前沿是指在多目标优化问题中不可被改进的解的集合。
Pareto前沿指标包括Hypervolume、Generational Distance、Inverted Generational Distance等。
2. 支配关系指标:衡量解集中解之间支配关系的分布情况。
例如,Nondominated Sorting和Crowding Distance。
3. 散度指标:衡量解集中解的多样性。
例子有Entropy和Spacing 等。
4.非支配解比例:衡量解集中非支配解的比例。
非支配解是指在解集中不被其他解支配的解。
除了解集评价指标,人们还提出了一些用于评价MOEAs性能的算法评价指标,例如:1.收敛性:衡量算法是否能找到接近最优解集的解集。
2.多样性:衡量算法是否能提供多样性的解。
3.计算效率:衡量算法是否能在较少的计算代价下找到高质量的解集。
除了上述指标,还有一些用于评价MOEAs性能的进阶指标,例如:1.可行性:衡量解集中的解是否满足的问题的约束条件。
2.动态性:衡量算法在动态环境中的适应性。
3.可解释性:衡量算法生成的解是否易于被解释和理解。
以上只是一些常用的指标,根据具体的问题和应用场景,还可以针对性地定义其他指标来评价MOEAs性能。
综上所述,MOEAs性能的评价是一个多方面的任务,需要综合考虑解集的质量、表示多样性以及算法的计算效率等方面。
多目标进化算法

多目标进化算法多目标进化算法(Multi-Objective Evolutionary Algorithm, MOEA)是一种基于生物进化原理的优化算法,用于解决具有多个目标函数的复杂优化问题。
相比传统的单目标优化算法,MOEA可以同时考虑多个不同的目标函数,从而寻找到一组在不同目标下均表现良好的解。
MOEA的基本思想是通过维护一个种群,通过种群的进化过程来搜索解空间。
在每一代进化中,MOEA将根据种群中个体在目标函数空间中的分布和拥挤度来选择和进化新的个体。
具体来说,MOEA主要包含以下几个关键步骤:1. 个体编码:将优化问题的解空间映射到决策变量空间。
不同的编码方式可以用来表示不同类型的问题,如二进制编码、实数编码等。
2. 种群初始化:随机生成一组初始个体,每个个体都表示一个潜在解。
3. 目标函数计算:对于每个个体,计算其在所有目标函数下的目标值。
这些目标值用来衡量个体的优劣。
4. 选择操作:根据个体的目标值和分布情况,选择一部分个体作为“父代”。
5. 交叉和变异:通过遗传操作,对选择出的“父代”进行交叉和变异,生成新的个体。
6. 支配关系和非支配排序:通过比较个体的目标值来确定其在种群中的支配关系,进而进行非支配排序。
支配关系和非支配排序旨在找到在目标函数空间中最优的解。
7. 环境选择:根据个体的支配关系和非支配排序,选择新的种群,用于下一代的进化。
8. 结束条件检查:判断算法是否达到结束条件,如达到最大迭代次数或找到满意的近似最优解等。
MOEA的优点是能够找到一组解集,这些解集在多个目标下都表现较好。
同时,MOEA还可以通过适当的参数配置和改进,提高算法的搜索效率和解集的多样性。
然而,MOEA也存在一些挑战和限制。
首先,在处理高维和复杂的优化问题时,MOEA的搜索过程可能会变得非常复杂和耗时。
此外,MOEA在选择操作和父代个体生成方面,需要设计合适的策略利用个体之间的关系,以便更好地维持种群的多样性和收敛性。
多目标进化优化

多目标进化优化多目标进化优化是一种解决多目标优化问题的方法,通过模拟生物进化过程中的遗传机制和自然选择原理,搜索出问题的多个最优解。
在多目标优化问题中,目标函数存在多个冲突的目标,即优化其中一个目标会对其他目标产生不利影响,因此需要找到一种平衡各目标之间的关系的方法。
多目标进化优化算法主要包括以下几个步骤:1. 初始化种群:首先随机生成一定数量的个体作为初始种群。
每个个体由一组变量组成,表示问题的一个可能解。
2. 评估适应度:计算每个个体的适应度值,即各目标函数的值。
根据问题的特点,适应度可以采用不同的策略,如求和、加权求和、Pareto支配等。
3. 选择操作:根据个体的适应度值,选择出一部分较优的个体作为父代。
常用的选择算子有锦标赛选择、轮盘赌选择等。
4. 交叉操作:对选择出的父代个体进行交叉操作,生成子代个体。
交叉操作的目的是将不同个体的优点进行组合,产生具有更优性能的个体。
5. 变异操作:对子代个体进行变异操作,引入一定的随机性,产生多样性。
变异操作的目的是避免陷入局部最优解,保持种群的多样性。
6. 更新种群:将父代和子代个体合并,得到新一代种群。
7. 判断终止条件:判断是否满足终止条件,如达到最大迭代次数、适应度值足够接近全局最优解等。
8. 输出结果:输出种群中的非支配解,即Pareto最优解。
多目标进化优化算法的优势在于可以同时搜索出问题的多个最优解,而不仅仅局限于单个最优解。
它能够提供给决策者一个更全面的选择空间,使其能够根据需要进行更灵活的决策。
然而,多目标进化优化算法的缺点在于计算复杂度较高,需要进行大量的目标函数评估,而且对于目标函数之间的关系没有明确的约束。
总之,多目标进化优化算法是一种有效的解决多目标优化问题的方法,通过模拟生物进化过程,搜索出问题的多个最优解。
它能够在多目标之间找到一个平衡,为决策者提供多种选择。
但是在实际应用中,需要根据具体情况选择合适的算法,并进行参数调优,以达到最优解。
多目标进化算法性能评价指标综述

多目标进化算法性能评价指标综述
多目标进化算法(MOEA)是一种用于解决多目标优化问题的进化计算方法。
与传统的单目标进化算法不同,MOEA在优化过程中考虑多个冲突的目标,从而得到一组更好的非劣解集合。
为了评价MOEA的性能,需要使用一些指标来衡量其优化结果的质量。
本文将对MOEA的性能评价指标进行综述。
1. 收敛性指标
收敛性指标用于衡量算法在搜索过程中是否能够找到最优解或最优解的好近似。
常用的收敛性指标包括:
- 均方根误差(Root Mean Square Error,RMSE):衡量非劣解集合中的解与真实最优解之间的平均距离。
- 绝对极差(Absolute Range,AR):衡量非劣解集合中的解与真实最优解之间的最大距离。
- 最小值距离(Minimum Distance,MD):衡量非劣解集合中的解与真实最优解之间的最小距离。
3. 运算效率指标
运算效率指标用于衡量算法在求解多目标优化问题时的计算效率。
常用的运算效率指标包括:
- 运算时间(Computation Time):衡量算法求解问题所消耗的时间。
- 迭代次数(Number of Iterations):衡量算法进行的迭代次数。
- 解集大小(Size of Solution Set):衡量算法生成的非劣解集合的大小。
以上只是部分常用的多目标进化算法性能评价指标,实际研究中可能还会使用其他指标来评价算法的性能。
对于不同的问题和应用,合适的性能评价指标可能有所不同。
在进行MOEA的性能评价时,应根据具体问题的特点来选择合适的指标进行评估。
多目标进化算法性能评价指标综述

多目标进化算法性能评价指标综述多目标进化算法是一种解决多目标优化问题的有效方法。
在多目标优化问题中,存在多个冲突的目标函数需要同时优化,因此需要一种能够生成一组非劣解(Pareto 解)的算法来解决这类问题。
多目标进化算法通过模拟自然界中生物进化的过程来搜索最优解,被广泛应用于工程设计、经济决策、机器学习等领域。
性能评价指标是用来度量多目标进化算法搜索能力和解集质量的指标,主要包括收敛性、多样性和均衡性等方面。
收敛性是衡量算法搜索能力的重要指标之一,用来评估算法是否能够快速找到Pareto 最优解集。
常用的收敛性指标包括收敛速度、收敛精度和收敛稳定性等。
收敛速度是指算法找到Pareto 最优解集所需的迭代次数或评估次数,可通过迭代终止条件或算法运行时间来衡量。
收敛精度是指算法找到的非劣解离Pareto最优解集的距离,一般使用Hypervolume指标来度量。
收敛稳定性是指算法收敛性在不同运行中是否稳定一致,可以通过算法的重复性试验来评估。
多样性是衡量算法搜索空间覆盖程度的指标,用来评估算法生成Pareto 最优解集的分布情况。
常用的多样性指标包括距离指标、密度指标和均匀度指标等。
距离指标是用来度量非劣解之间的相似度和分散度,常用的距离指标包括Euclidean Distance、Normalized Euclidean Distance、Inverse Generational Distance等。
密度指标是用来度量非劣解分布的稀疏程度,常用的密度指标包括Distance-based Diversity、Crowding Distance等。
均匀度指标是用来衡量非劣解在目标空间上的分布是否均匀,常用的均匀度指标包括Uniformity Ratio、Sparsity Measure等。
综上所述,多目标进化算法的性能评价指标综合考虑了收敛性、多样性和均衡性等多个方面的指标,旨在评估算法的整体性能和搜索能力。
多目标进化算法性能评价指标综述

多目标进化算法性能评价指标综述
随着多目标优化技术的不断发展,多目标进化算法(MOEA)已成为解决多维度问题的
重要工具之一。
然而,MOEA的性能评价一直是该领域的热点研究方向之一,其指标系统的建立显得尤为特别。
本文对MOEA的性能评价指标进行梳理,以期对该领域研究者提供参
考和便利。
1.收敛性
收敛性是衡量进化算法全局搜索能力的重要指标,主要包括收敛速度和收敛质量两个
方面。
其中,收敛速度指算法收敛到全局最优解需要的演化代数或计算时间,收敛质量指
算法搜索到的最优解与真实最优解之间的距离。
2.多样性
多样性是指解集内个体之间的差异性,反应了算法在搜索过程中是否能够保持多样性,并探索搜索空间的不同区域。
3.非支配排序质量
非支配排序质量指算法对所有个体进行非支配排序的结果质量,包括排序的准确性、
排序的稳定性等。
4.拥挤度
拥挤度是指算法在搜索过程中,对种群中个体之间的密度分布情况的度量,可以表现
出算法搜索的均匀性。
5.可视化
可视化是指将多维目标解集以图形方式呈现出来,便于用户进行可视化分析和决策。
6.计算效率
计算效率包括两个方面,分别是算法每次迭代的计算时间或计算代数,以及算法在处
理大规模问题时所需要的计算复杂度。
7.可解释性
可解释性指算法结果的可解释程度,也就是算法为用户提供的解释,是否直观、易于
理解。
8.鲁棒性
鲁棒性是指算法对于问题参数的变化或初始种群的不同可能存在的变化,算法仍然能够保持一定的性能水平。
最新高维多目标进化算法总结
高维多目标进化算法二、文献选读内容分析及思考(一)Borg算法Borg算法是基于ε-MOEA算法(Deb,2003)的一种全新改进算法[32],下面将从创新点、原理、算法流程和启发思考四方面进行阐述。
1. 创新点1)在ε支配关系的基础上提出ε盒支配的概念,具有能同时保证算法收敛性与多样性的特点。
2)提出了ε归档进程,能提高算法计算效率和防止早熟。
3)种群大小的自适应调整。
4)交叉算子的自适应选择。
由于处理实际问题时,是不知道目标函数具有什么特性,前沿面如何,在具有多个交叉算子的池子里,根据进程反馈,选择不同的交叉算子,使产生的后代具有更好的特性针对要研究的问题。
2. Borg算法原理1)ε盒支配:通过对目标空间向量的每一维除以一个较小的ε,然后取整后进行pareto支配比较。
这样的支配关系达到的效果是把目标空间划分成以ε为边长的网格(2目标时),当点处于不同的网格时,按pareto支配关系比较;当处于同一网格时,比较哪个点距离中心点(网格最左下角)最近。
这样一来,网格内都只有一个点。
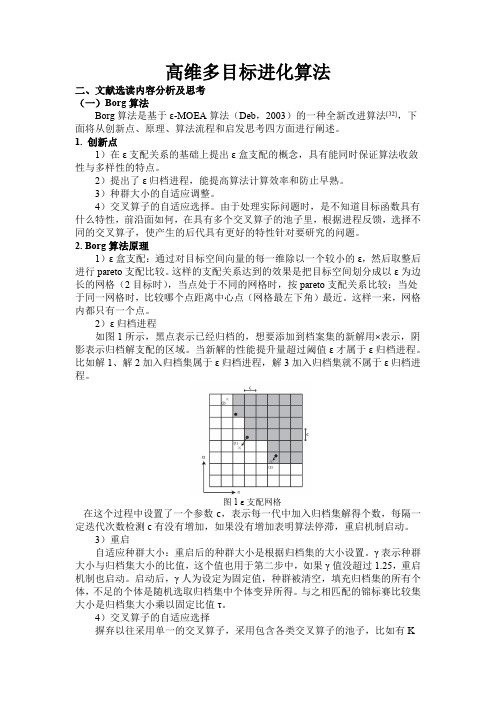
2)ε归档进程如图1所示,黑点表示已经归档的,想要添加到档案集的新解用×表示,阴影表示归档解支配的区域。
当新解的性能提升量超过阈值ε才属于ε归档进程。
比如解1、解2加入归档集属于ε归档进程,解3加入归档集就不属于ε归档进程。
图1 ε支配网格在这个过程中设置了一个参数c,表示每一代中加入归档集解得个数,每隔一定迭代次数检测c有没有增加,如果没有增加表明算法停滞,重启机制启动。
3)重启自适应种群大小:重启后的种群大小是根据归档集的大小设置。
γ表示种群大小与归档集大小的比值,这个值也用于第二步中,如果γ值没超过1.25,重启机制也启动。
启动后,γ人为设定为固定值,种群被清空,填充归档集的所有个体,不足的个体是随机选取归档集中个体变异所得。
与之相匹配的锦标赛比较集大小是归档集大小乘以固定比值τ。
4)交叉算子的自适应选择摒弃以往采用单一的交叉算子,采用包含各类交叉算子的池子,比如有K种交叉算子,选择概率最开始是相等的,设n表示各类交叉算子产生的后代属于ε归档进程所得个数,个数越多,选取相应交叉算子的概率就越大,逐渐趋于选择解决未知现实问题的交叉算子。
最新高维多目标进化算法总结
高维多目标进化算法二、文献选读内容分析及思考(一)Borg算法Borg算法是基于ε-MOEA算法(Deb,2003)的一种全新改进算法[32],下面将从创新点、原理、算法流程和启发思考四方面进行阐述。
1. 创新点1)在ε支配关系的基础上提出ε盒支配的概念,具有能同时保证算法收敛性与多样性的特点。
2)提出了ε归档进程,能提高算法计算效率和防止早熟。
3)种群大小的自适应调整。
4)交叉算子的自适应选择。
由于处理实际问题时,是不知道目标函数具有什么特性,前沿面如何,在具有多个交叉算子的池子里,根据进程反馈,选择不同的交叉算子,使产生的后代具有更好的特性针对要研究的问题。
2. Borg算法原理1)ε盒支配:通过对目标空间向量的每一维除以一个较小的ε,然后取整后进行pareto支配比较。
这样的支配关系达到的效果是把目标空间划分成以ε为边长的网格(2目标时),当点处于不同的网格时,按pareto支配关系比较;当处于同一网格时,比较哪个点距离中心点(网格最左下角)最近。
这样一来,网格内都只有一个点。
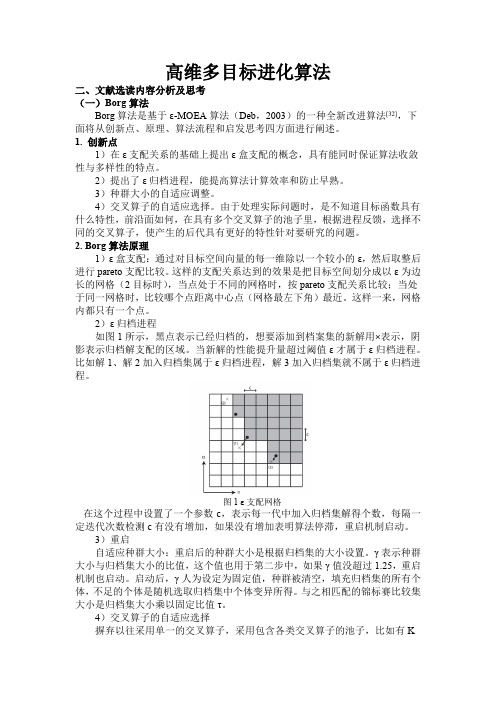
2)ε归档进程如图1所示,黑点表示已经归档的,想要添加到档案集的新解用×表示,阴影表示归档解支配的区域。
当新解的性能提升量超过阈值ε才属于ε归档进程。
比如解1、解2加入归档集属于ε归档进程,解3加入归档集就不属于ε归档进程。
图1 ε支配网格在这个过程中设置了一个参数c,表示每一代中加入归档集解得个数,每隔一定迭代次数检测c有没有增加,如果没有增加表明算法停滞,重启机制启动。
3)重启自适应种群大小:重启后的种群大小是根据归档集的大小设置。
γ表示种群大小与归档集大小的比值,这个值也用于第二步中,如果γ值没超过1.25,重启机制也启动。
启动后,γ人为设定为固定值,种群被清空,填充归档集的所有个体,不足的个体是随机选取归档集中个体变异所得。
与之相匹配的锦标赛比较集大小是归档集大小乘以固定比值τ。
4)交叉算子的自适应选择摒弃以往采用单一的交叉算子,采用包含各类交叉算子的池子,比如有K种交叉算子,选择概率最开始是相等的,设n表示各类交叉算子产生的后代属于ε归档进程所得个数,个数越多,选取相应交叉算子的概率就越大,逐渐趋于选择解决未知现实问题的交叉算子。
多目标进化算法总结

多目标进化算法总结多目标进化算法是一种用于解决多目标优化问题的计算方法。
它通过模拟生物进化过程中的自然选择、交叉和突变等操作,对问题进行多次迭代优化,以找到一组平衡解集,从而提供决策者从多个方面进行选择的可能性。
以下是一个关于多目标进化算法的总结,包括其基本原理、常用算法及应用领域。
首先,多目标进化算法的基本原理是受到达尔文的演化论和自然选择理论的启发。
它将问题转化为一个多目标优化问题,其中存在多个决策变量和多个目标函数,目标函数之间可能存在相互冲突的关系。
多目标进化算法通过维护一个种群,并使用评估函数对种群进行适应度评估,将适应度高的个体作为“优良”的进化方向进行选择、交叉和突变等操作。
通过多次迭代,算法不断优化得到一组平衡解集,这些解集代表了问题的不同权衡取舍方案,决策者可以从中选择最优解。
目前,常用的多目标进化算法包括非支配排序遗传算法(NSGA)、快速非支配排序遗传算法(NSGA-II)、多目标粒子群优化算法(MOPSO)、多目标差分进化算法(MODE)等。
这些算法都基于遗传算法的核心思想,并在适应度评估、选择、交叉和突变等方面进行了改进。
例如,NSGA-II采用非支配排序策略和拥挤度距离,以保持种群的多样性。
MOPSO引入了粒子群优化的思想,通过粒子的位置和速度来表示解的状态和进化方向。
MODE则利用差分进化的策略,通过变异和交叉操作来更新种群。
多目标进化算法具有广泛的应用领域。
首先,在工程设计领域,多目标进化算法可以应用于多目标优化问题的求解,如结构优化、参数优化等。
其次,在组合优化问题中,多目标进化算法可以用于求解旅行商问题、背包问题等。
此外,在规划和调度问题中,多目标进化算法可以用于求解资源分配、任务调度等问题。
另外,多目标进化算法还可以在金融投资领域中应用于资产配置、投资组合优化等问题。
总的来说,多目标进化算法是一种有效的求解多目标优化问题的方法,它通过模拟生物进化的过程,利用选择、交叉和突变等操作对问题解空间进行。
高维多目标优化算法

高维多目标优化算法是一种处理高维数据集并同时优化多个目标函数的算法。
这种算法广泛应用于复杂的问题,如多目标决策问题、数据挖掘、机器学习等。
高维多目标优化算法通常是通过构建一个多目标优化模型,然后通过特定的搜索策略来寻找最优的解决方案。
对于高维多目标优化问题,通常存在两种主要的解决策略:基于Pareto优化的方法,和不基于Pareto优化的方法。
基于Pareto优化的方法,如NSGA2、PESA2和SPEA2等,通常会构建一个外部集,这个外部集存放的是当前代的所有非支配个体,从而使解集保持较好的分布度。
NSGA2的优点在于运行效率高、解集有良好的分布性,特别对于低维优化问题具有较好的表现;其缺点在于在高维问题中解集过程具有缺陷,解集的多样性不理想。
PESA2的优点在于其解的收敛性很好,比较容易接近最优面,特别是在高维问题情况下;但其不足之处在于选择操作一次只能选取一个个体,时间消耗很大,而且阶级的多样性不佳。
以上信息仅供参考,如果还想了解更多信息,建议咨询专业人士。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
高维多目标进化算法二、文献选读内容分析及思考(一)Borg算法Borg算法是基于ε-MOEA算法(Deb,2003)的一种全新改进算法[32],下面将从创新点、原理、算法流程和启发思考四方面进行阐述。
1. 创新点1)在ε支配关系的基础上提出ε盒支配的概念,具有能同时保证算法收敛性与多样性的特点。
2)提出了ε归档进程,能提高算法计算效率和防止早熟。
3)种群大小的自适应调整。
4)交叉算子的自适应选择。
由于处理实际问题时,是不知道目标函数具有什么特性,前沿面如何,在具有多个交叉算子的池子里,根据进程反馈,选择不同的交叉算子,使产生的后代具有更好的特性针对要研究的问题。
2. Borg算法原理1)ε盒支配:通过对目标空间向量的每一维除以一个较小的ε,然后取整后进行pareto支配比较。
这样的支配关系达到的效果是把目标空间划分成以ε为边长的网格(2目标时),当点处于不同的网格时,按pareto支配关系比较;当处于同一网格时,比较哪个点距离中心点(网格最左下角)最近。
这样一来,网格内都只有一个点。
2)ε归档进程如图1所示,黑点表示已经归档的,想要添加到档案集的新解用×表示,阴影表示归档解支配的区域。
当新解的性能提升量超过阈值ε才属于ε归档进程。
比如解1、解2加入归档集属于ε归档进程,解3加入归档集就不属于ε归档进程。
图1 ε支配网格在这个过程中设置了一个参数c,表示每一代中加入归档集解得个数,每隔一定迭代次数检测c有没有增加,如果没有增加表明算法停滞,重启机制启动。
3)重启自适应种群大小:重启后的种群大小是根据归档集的大小设置。
γ表示种群大小与归档集大小的比值,这个值也用于第二步中,如果γ值没超过1.25,重启机制也启动。
启动后,γ人为设定为固定值,种群被清空,填充归档集的所有个体,不足的个体是随机选取归档集中个体变异所得。
与之相匹配的锦标赛比较集大小是归档集大小乘以固定比值τ。
4)交叉算子的自适应选择摒弃以往采用单一的交叉算子,采用包含各类交叉算子的池子,比如有K种交叉算子,选择概率最开始是相等的,设n表示各类交叉算子产生的后代属于ε归档进程所得个数,个数越多,选取相应交叉算子的概率就越大,逐渐趋于选择解决未知现实问题的交叉算子。
3. Borg算法总体流程通过交叉算子的自适应选择选择一种交叉算子,假设所选交叉算子需要K 个父代,1个父代在归档集中按均匀分布选择,K-1个父代从种群中按锦标赛选择(大小按上述第3步中计算),交叉产生一个后代,如果这个后代pareto支配种群中一个或多个个体,则随机的取代一个;如果被种群中的任一个体支配,则不能加入种群;如果互不支配,也是随机的取代种群中的一个。
而加入归档集,是按照上述第2步实施的。
如此循环一定代数之后,看达没达到第3步重启的条件,达到则重启过程开始,直至满足终止条件。
4. 思考1)ε盒支配时,同一网格内的点只是比较离中心点距离最近的,这就有一个不足,最近的不一定是非支配解,离的远的点有可能还支配它,我觉得还需要比较一下哪个解优的目标维数多。
2)设计一种云交叉算子,加入到交叉算子的池子里,或是参数控制云交叉算子替换其中的能达到类似效果的几种算子,便于统一。
(二)基于模糊支配的高维多目标进化算法1. 算法简介基于模糊支配的高维多目标进化算法[33]是对模糊支配关系的一种改进,2005年M. Farina首次提出的模糊支配,其隶属函数是一条正态分布函数,如图2所示,而此文的隶属函数是一条半正态分布函数,表达的概念更加清晰。
图2 正态隶属函数对于最小化问题,归一化后的解A(a1,a2,...,a M),B(b1,b2,...,b M)如果目标向量的某一维上的差量(a i-b i)达到-1,则a i好于b i的程度为1,即pareto支配关系下a i支配b i;如果差量(a i-b i)是1,则pareto支配关系下b i支配a i。
A模糊支配B程度为每一维差量映射下的隶属度之积,与种群中其他解进行比较,所得隶属度相加即为A解在整个中群众的性能好坏程度,相当于NSGA-II中的非支配排序,只是这里的等级程度更加细分,然后还得设置一个阈值α,即模糊支配隶属度达到多少才能是最优解,也就是NSGA-II中的非支配排序等级为1的解。
设定这个值是关键,此文献也对这个值得选取进行了实验说明,针对不同的问题选取不同的值,但是还没能达到根据问题特性自适应调整。
2. 思考1)既然隶属度函数不是一成不变的,想用云模型确定隶属度,借鉴张国英《高维云模型及其在多属性评价中的应用》构造一M维云模型,它的作用是输入M维差量映射为一维的模糊支配隶属度u,无需像上文中求出每一维隶属度再相乘。
2)由于阈值α不好确定,可不可以根据归档集的大小取前N个,找到使个体数量大于等于N的u值为α。
(三)基于网格支配的高维多目标进化算法GrEA[34]也是针对ε-MOEA算法进行改进的,作者认为ε-MOEA算法中的网格划分是基于个体的,如果个体分配不均匀,也就不能得到分布性好的最优前沿,而且网格的大小也不能随着目标空间的特性而自适应调整。
1. 支配关系创新grid-dominance,这种支配关系是基于空间区域划分网格,就是在当代种群中找出每一个目标函数上的最大值与最小值(下图上行),然后根据这两个值计算出这个目标函数的网格上下界值(下图下行)。
人为设定每一个目标函数需划分的段数div,是一个固定的值,这样就使得收敛性与多样性的要求随着算法进程自适应调整,比如说刚开始时目标空间的个体分布比较广,就需要大的网格来选择个体,随着算法深入,个体更加集中于Pareto前沿区域,就需要小的网格区分个体,更加强调个体的多样性,因此这样动态的网格划分更能体现算法的进程。
另外,ε-支配强调个体生死,只有非支配才能加入归档集;而grid dominance不同,它更强调个体的先后,非支配个体只是先于支配个体进入归档集,支配个体还是有机会加入归档集,这在一定程度上保留了边界点,而ε-MOEA算法会丢失边界点。
图3 网格分段示意图2. 适应度值指派创新本文提出了适应度值指派的三个指标grid ranking (GR)、grid crowding distance (GCD)和grid coordinate point distance(GCPD),GR和GCPD是收敛性评价指标,GCD是多样性评价指标,网格指标如图4所示。
GR表示个体所处网格各维目标函数坐标之和,相当于将目标向量各维相加,只不过这里是将函数值映射为所处网格坐标值之和。
比如下图A点的网格坐标为(0,4),则GR=0+4=4。
GCD是网格拥挤距离,以往的网格拥挤距离都是在一个网格之内的,这样就不能反映分布性了,此处的GCD还考虑临近网格的个体,用网格坐标的差量之和评估,之和越小的GCD值就越大,多样性就越差。
如下图C的邻居是B、D,F的邻居是E、G。
GCPD表示的是同一网格内与中心点的距离,这一点与ε-MOEA中相同。
比较的先后准则是GR,GR相同比较GCD,GR、GCD都相同则比较GCPD。
图4 网格指标示意图3. 归档策略的改进以往的归档策略都是基于适应度值的支配关系选择删除,这样会导致解集多样性的缺失,因为相邻的点具有相似的适应度值,会使他们同时被选择或删除,比如上图的E、F、G,这样多样性会得不到保证。
本文作者对归档策略进行了改进,就是当一个个体加入归档集时,在归档集中和它相关的个体GR值会受到惩罚,相关的个体包括:1. 处于同一网格坐标 2. 被网格支配的 3. 邻域个体,惩罚力度依次减小。
(四)基于坐标转换的高维多目标进化算法针对原始的密度评估算子在高维多目标中会出现不能很好的兼顾收敛性与多样性,解集往往会有很好的多样性而收敛性差的缺点,论文设计了一种包含收敛性的密度评估算子shift-based density estimation (SDE)[35]。
比如图5中的A点,按照基于pareto支配的多目标优化算法来看,是非支配解切多样性好于B、C、D,但很明显得看出A点收敛性不及BCD。
SDE是将各维目标函数上小于A点对应维的值转化为A点那一维的函数值,如下图所示。
转换之后A点的密度值较大,而BCD密度值较小,符合所考虑的情况图5 坐标转换示意图从图6的四图中可以看出,只有收敛性和多样性都好的个体,其SDE值小,即其值不仅体现密度信息,而且将收敛性信息也包含在内。
SDE是一种通用的密度评估算子,可以将其植入NSGA-II,SPEA2和PESA-II中。
图6 拥挤密度示意图(五)基于角点排序的高维多目标进化算法本文是在非支配排序上的改进。
在高维多目标优化问题中,随着目标维数的增加,非支配解之间的比较次数是非常大的,因此论文提出了角点支配。
所谓的角点指的是在M维目标空间中只考虑其中k个目标,在本文中只考虑一个目标函数上的,因为在一个目标函数上最好的点肯定是非支配解。
二维、三维角点分别如下图所示。
图7 二维、三维角点示意图找到角点后,所有被角点支配的点就不用比较了,大大减少评价次数。
而且本文还指出非支配解排序的比较次数应该是精确到每一维的目标函数的比较上,因为每两个解之间目标函数的比较次数从2到M,也就是说不同的两个解之间比较所花费的计算量是不同的,只计算一个解与其他解的比较次数是不对的。
角点支配排序大致过程如图8所示。
图8 角点非支配排序图8是2维目标函数的情况,首先得找出每一维目标函数上最好的点,如上图A 中的白点,标记他们所支配的点如上图阴影区域,这些点在当前等级中就不考虑排序了,在剩下的点中再寻找两个角点,直到将所有的点都标记,如图B ,B 中白点表示等级1,等级2、3依次进行。
(六)NSGA -III 算法系列文献1. MO -NSGA -II为了适合解决高维多目标问题,Kalyanmoy Deb 针对NSGA -II 的缺点,提出了MO -NSGA -II (many -objective NSGA -II ),这是NSGA -III 的雏形。
MO -NSGA -II 的基本框架和NSGA -II 差不多,不同之处在于精英选择机制上,因为原有的选择机制对快速增加的非支配解已经没有选择压力。
MO -NSGA -II 是一种基于参考点的多目标算法,放置分布性好的参考点,使得到的非支配解靠近这些参考点,就能得到分布性好的最优前端。
让我们回顾一下NSGA -II ,有一个大小为N 的当前种群P t ,由他产生的子代种群Q t ,大小也为N ,然后对P t 、Q t 的合集R t 进行快速非支配排序F 1、F 2...Fi,将这些点按等级加入下一代种群P t+1,通过对F l 中个体计算拥挤距离按降序排列,依次加入P t+1,直到种群大小为N 。