多目标进化算法总结
多目标进化算法的性能评价指标总结(一)
多目标进化算法的性能评价指标总结(一)多目标进化算法的性能评价指标总结(一)为了评价MOEA的性能,需要考虑多个方面的指标。
以下是对MOEA性能评价指标的总结:1. 非劣解集合覆盖度(Coverage):非劣解集合的覆盖度反映了MOEA生成的解与真实最优解集合之间的接近程度。
常用的覆盖度指标有被支配解的个数(Nr),被真实最优解支配的个数(Np),以及非劣解集合的密度等。
2. 均衡性(Uniformity):均衡性指标度量了非劣解集合中的解之间在目标空间中的分布均匀程度。
均衡性可以使用负熵、加权密度等指标来量化。
3. 支配关系(Dominance):支配关系用于确定非劣解集合中每个解的优劣关系。
通过计算被支配解和支配解的个数,可以得到非劣解集合中解的优势和劣势。
4. 与真实最优解集合的距离(Distance):距离指标用于衡量非劣解集合中的解与真实最优解集合之间的近似程度。
常见的距离指标有欧几里得距离、曼哈顿距离、哈尔索特距离等。
5. 收敛性(Convergence):收敛性指标用于评估算法的收敛速度和稳定性。
常用的收敛性指标有收敛速度、收敛精度和平稳度等。
6. 多样性(Diversity):多样性指标用于评价非劣解集合中解的多样性程度。
多样性可以通过计算解之间的相似度、密度和聚类情况等指标来度量。
不同指标的重要性取决于具体问题和需求,没有一种综合评价指标适用于所有情况。
因此,在评估MOEA性能时,需要根据实际情况选择合适的指标,并进行综合考虑。
综上所述,非劣解集合覆盖度、均衡性、支配关系、与真实最优解集合的距离、收敛性、多样性和运行时间是评估MOEA性能的常用指标。
这些指标可以提供对MOEA在解决多目标优化问题中的效果和性能的全面评价。
多目标进化算法总结

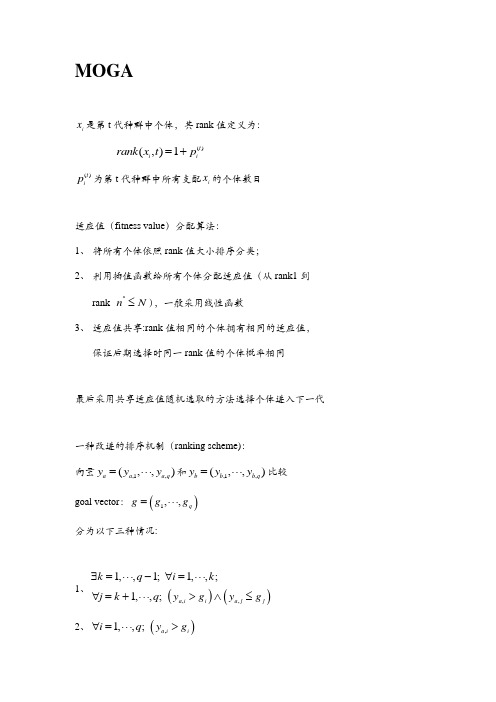
MOGAi x 是第t 代种群中个体,其rank 值定义为:()(,)1t i i rank x t p =+()t i p 为第t 代种群中所有支配i x 的个体数目适应值(fitness value )分配算法:1、 将所有个体依照rank 值大小排序分类;2、 利用插值函数给所有个体分配适应值(从rank1到rank *n N ≤),一般采用线性函数3、 适应值共享:rank 值相同的个体拥有相同的适应值,保证后期选择时同一rank 值的个体概率相同最后采用共享适应值随机选取的方法选择个体进入下一代一种改进的排序机制(ranking scheme ): 向量,1,(,,)a a a q y y y =⋅⋅⋅和,1,(,,)b b b q y y y =⋅⋅⋅比较 goal vector :()1,,q g g g =⋅⋅⋅ 分为以下三种情况: 1、()(),,1,,1; 1,,;1,,; a i i a j j k q i k j k q y g y g ∃=⋅⋅⋅-∀=⋅⋅⋅∀=+⋅⋅⋅>∧≤2、(),1,,; a i i i q y g ∀=⋅⋅⋅>当a y 支配b y 时,选择a y 3、(),1,,; a j j j q y g ∀=⋅⋅⋅≤ 当b y 支配a y 时,选择b y优点:算法思想容易,效率优良 缺点:算法容易受到小生境的大小影响 理论上给出了参数share σ的计算方法NPGA基本思想: 1、初始化种群Pop2、锦标赛选择机制:随机选取两个个体1x 和2x 和一个Pop 的 子集CS(Comparison Set)做参照系。
若1x 被CS 中不少于一 个个体支配,而2x 没有被CS 中任一个体支配,则选择2x 。
3、其他情况一律称为死结(Tie ),采用适应度共享机制选择。
个体适应度:i f小生境计数(Niche Count ):(),i j Popm Sh d i j ∈=⎡⎤⎣⎦∑共享函数:1-,()0,share shareshare d d Sh d d σσσ⎧≤⎪=⎨⎪>⎩共享适应度(the shared fitness ):iif m选择共享适应度较大的个体进入下一代优点:能够快速找到一些好的非支配最优解域 能够维持一个较长的种群更新期 缺点:需要设置共享参数需要选择一个适当的锦标赛机制限制了该算法的实际应用效果NPGA II基本思想: 1、初始化种群Pop2、Pareto 排序:非支配个体rank=0;其余个体 rank=支配该个体的个体数目3、锦标赛选择机制:种群中任选两个个体1x 和2x , 若()()12rank x rank x <,则选择1x ; 若是()()12rank x rank x =,称为死结(Tie ), 采用适应度共享机制选择。
多目标进化算法性能评价指标综述
多目标进化算法性能评价指标综述多目标进化算法是一种用于解决多目标优化问题的强大工具。
它以其能够同时优化多个目标函数的能力而备受关注。
如何评价多目标进化算法的性能仍然是一个具有挑战性的问题。
虽然很多评价指标已经被提出,但每个指标都有其特定的应用场景和局限性。
本文将综述多目标进化算法的性能评价指标,以帮助研究者和使用者更好地评估多目标进化算法的性能。
1. 均衡性指标均衡性指标用于评估算法在多个目标之间的平衡性。
这些指标可以帮助我们判断算法是否能够生成平衡的解决方案。
典型的均衡性指标包括:(1) Hypervolume:Hypervolume指标用于评估算法生成的解决方案的多样性和收敛程度。
它通过计算解决方案的非支配前沿与被评估区域之间的体积来度量性能。
(2) Inverted Generational Distance (IGD):IGD指标衡量了算法生成的解决方案与理想前沿之间的距离。
较小的IGD值表示算法具有较好的均衡性能。
(3) Coverage:Coverage指标用于测量算法生成的解决方案的多样性。
它计算非支配前沿的覆盖率,即非支配解的数量与全部解的比值。
(2) ε-Indicator:ε-Indicator指标通过计算非支配前沿中每个解的ε-邻域与真实前沿之间的距离来度量收敛性能。
(3) Spread:Spread指标可以量化算法生成的解决方案的分布情况。
它计算真实前沿与算法生成的解决方案之间的差异,较小的差异表示较好的收敛性能。
(1) Spacing:Spacing指标可以量化解决方案之间的均匀分布程度。
较大的Spacing 值表示较好的多样性性能。
(2) S-Metric:S-Metric指标通过度量非支配前沿中各解之间的密度来评估多样性性能。
较大的S-Metric值表示较好的多样性性能。
(3) Crowding Distance:Crowding Distance指标用于度量解之间的拥挤程度。
多目标优化进化算法比较综述

优化的进化算法, 并对算法进行 了简要 比较。 关键词 多 目标优化 粒子群 遗传算法 蚁群算法
文献标 识码 : A
人 工免 疫 系统
( 四) 多目标蚁群算法。 多 目标 蚁群 算法 的 思想 是 : 根据 目标 函数 的数 目将 蚂蚁 分
成若 干 子群 体 , 为每个 子群 体分 配… 个 目标 函 数 , 在 其他 子群 体优 化 结 果的基 础 一 t z 通过 P r a e t o过 滤器 来获 得 均衡 解 。基 小
级子 F { 标 向量 巾 的各 H标 分 量要 全 部参 与 比较 。给 定 一个
不 可实 现 的 期望 日标 r u J 量时, 向量 比较 退 化罕 原始 的 P a r e t o 排
多 目标 遗化 算 法 : 有 着 良好 的 鲁棒 性和 优越 性 , 在洲 挤 选
序, 所 有 目标元 素 都必 须 参 与 比较 。算 法运 行过 程 巾 , 适 应值 择算 子 时 , 限制种 群 人 小使 } { j 拥 挤 比较 过程 , 使算 法 失 去 了收 图 景可 由不 断 改 变的 期望 目标值 改变 , 种 群可 由此被 引导 并集 敛性 。 人 工 免疫 系 统 : 可 以得剑 优 化 问题 的 多个 P a r e t o 最优解, 多 目标 P S O 约 束算 法 : 能够 实 现 对 多维 中 一 一 特 定折 巾 区域 。 当前 利 群 中( 基丁P a r e t o最优 概 念) 优 算 法运 行缺 乏稳 定性 。 于 该解 的其 他 解 的个 数 决 定利・ 群 巾每 一个 向量解 的排 序 。 ( 二) 人 工免 疫 系统 人: l : 免疫 算 法是 [ J 然 免 疫系 统在 进 化 计算 巾的一 个 应用 ,
多目标的免疫进化算法

多目标的免疫进化算法免疫进化算法(Immune Evolutionary Algorithm,IEA)是一种模拟生物免疫系统的算法,它以免疫机制对生物系统中的非自身物质进行检测和消除为基础,将免疫机理与进化算法相结合,构建出一种新的计算智能算法。
在很多现实问题中,往往会涉及到多个目标的优化,而传统的进化算法只能针对一个目标进行优化,无法同时优化多个目标。
为了解决这一问题,学者们将多目标优化问题引入到免疫进化算法中,形成了多目标免疫进化算法(Multi-objective Immune Evolutionary Algorithm,MOIEA)。
多目标优化问题中存在多个矛盾的目标,而MOIEA的核心思想在于设计一个能够在多个目标之间平衡的适应度函数,通过协同进化的方式来实现多目标优化的目的。
MOIEA的优点在于它能够在同一时间内对多个目标进行寻优,避免了在设计中对单一目标的过度关注。
同时,该算法也弥补了其他多目标优化算法在处理不均衡目标时的缺陷,能够在目标数量不确定或不确定的解决方案存在的情况下进行优化。
在MOIEA算法中,主要有两种策略:一是Dominance Strategy (支配策略),二是Diversity Strategy(多样性策略)。
Dominance Strategy是MOIEA算法中的核心策略,通过将解集中的解根据目标函数值中的支配关系分为不同的支配层,实现对解集内部的排序和选择。
换句话说,Dominance Strategy将所有解分成不同的层级,第i+1层中所有解都被第i层的解所支配。
Diversity Strategy则是用来保证解集的多样性,确保解集中的解对应不同的目标方案。
这种策略可以通过(1)交叉操作、(2)变异操作、(3)聚合策略等方式来达到。
MOIEA算法已被应用于多个领域,包括电力网络规划、城市交通规划、纺织工艺优化、信号处理等,取得了不错的效果。
然而,MOIEA仍然存在一些问题,如处理高维问题时过程变得非常缓慢。
多目标进化算法性能评价指标综述

多目标进化算法性能评价指标综述多目标进化算法(Multi-Objective Evolutionary Algorithms,MOEAs)是一类用于解决多目标优化问题的算法。
在实际问题中,往往需要同时优化多个目标函数,这就需要使用多目标优化算法来寻找最优解集。
由于多目标优化问题的复杂性,需要对算法的性能进行全面评价。
本文将对多目标进化算法的性能评价指标进行综述,以期为相关领域的研究者提供参考和指导。
1. 收敛性多目标进化算法的收敛性是评价其性能的重要指标之一。
收敛性指标主要包括收敛速度和收敛准确度两个方面。
在理想情况下,算法应该能够在有限的迭代次数内找到接近于真实帕累托前沿的解集。
收敛速度指标可以通过衡量解集与真实帕累托前沿的距离来评价,收敛准确度则可以通过度量算法得到的解集是否足够接近帕累托前沿来评价。
2. 多样性多目标进化算法的多样性是指得到的解集中是否包含了足够多的种类和分布较广的解。
多样性指标主要包括均匀分布和分散度两个方面。
均匀分布指标可以通过衡量解集中解的分布是否均匀来评价,分散度指标则可以通过度量解集中解的分散程度来评价。
多样性的评价是为了确保算法能够获得全局的非劣解,而不是仅仅集中在某一区域。
3. 运行时间多目标进化算法的运行时间是指算法寻找最优解集所需的时间。
在实际问题中,算法的运行时间是一个十分重要的性能指标,因为用户往往希望算法在尽可能短的时间内给出满意的解集。
运行时间的评价需要综合考虑算法的收敛速度和解集的多样性来进行评价。
4. 鲁棒性多目标进化算法的鲁棒性是指算法对问题参数变化的适应能力。
在实际问题中,问题的参数往往会有所变化,因此算法的鲁棒性是十分重要的。
鲁棒性指标主要包括参数敏感性和问题变化适应性两个方面。
参数敏感性指标可以通过度量算法对参数变化的敏感程度来评价,问题变化适应性指标则可以通过度量算法对问题变化的适应能力来评价。
5. 可解释性多目标进化算法的可解释性是指算法得到的解集是否能够为用户提供有效的决策支持。
多目标进化算法性能评价指标综述
多目标进化算法性能评价指标综述多目标进化算法是一种用来解决多目标优化问题的有效工具。
它通过模拟自然进化过程,不断改进种群中的个体,以在多个目标之间找到平衡。
在实际应用中,如何评价多目标进化算法的性能成为了一个关键问题。
本文将对多目标进化算法性能评价指标进行综述,帮助读者了解如何评价和选择合适的算法。
一、收敛性收敛性是评价多目标进化算法性能的重要指标之一。
它反映了算法在解空间中的搜索效果,即算法能否找到全局最优解或接近最优解。
常用的收敛性指标包括最大最小化生成距离(Maximum Minimum Distance, MMD)和最大Pareto前沿距离(Maximum Pareto Front Distance, MPFD)。
MMD指标用于度量种群中所有个体间的最大距离,而MPFD则是用来度量种群中个体和真实Pareto前沿的最大距离。
一般来说,较小的MMD和MPFD值意味着算法具有较好的收敛性。
二、多样性多样性是评价算法搜索能力的另一个重要指标。
它反映了算法在解空间中的分布情况,即算法能否找到多样化的解集合。
常用的多样性指标包括种群熵(Population Entropy)和广度(Spread)。
种群熵用于度量种群中个体的多样性程度,而广度则是用来度量种群中所有解的分布情况。
一般来说,较大的种群熵和广度值意味着算法具有较好的多样性。
三、收敛速度收敛速度是评价算法搜索效率的指标之一。
它反映了算法在解空间中的搜索速度,即算法能够多快找到最优解。
常用的收敛速度指标包括平均收敛代数(Average Convergence Generation, ACG)和最短收敛时间(Shortest Convergence Time, SCT)。
平均收敛代数用于度量算法平均收敛所需的代数,而最短收敛时间则是用来度量算法收敛所需的最短时间。
一般来说,较小的平均收敛代数和最短收敛时间意味着算法具有较快的收敛速度。
四、可行性五、鲁棒性鲁棒性是评价算法搜索稳定性的指标之一。
多目标进化算法总结

多目标进化算法总结多目标进化算法(MOEA, Multiple Objective Evolutionary Algorithm)是一类基于进化算法的优化方法,主要用于解决具有多个相互竞争的目标函数的问题。
MOEA通过维护一组解的种群,采用进化操作来尽可能多的帕累托最优解集。
下面对MOEA进行详细总结。
首先,MOEA的基本思想是通过模拟自然进化过程进行优化,它借鉴了进化生物学中的适应度、交叉、突变等概念。
MOEA维护了一个种群,每个个体代表一个解,种群中的个体通过进化操作进行迭代更新。
在进化过程中,MOEA通过交叉和突变操作生成新的个体,通过适应度评估来决定个体的生存能力,根据个体在不同目标函数上的性能对种群进行选择和更新。
其次,MOEA的核心是解的评估和解的选择。
MOEA采用一个适应度函数来评估解在多个目标函数上的性能。
适应度函数一般采用拥挤度或距离等概念来度量解的优劣。
拥挤度是指解在种群中的分布密度,用以保持解的多样性。
根据适应度函数的评估结果,MOEA决定哪些解会生存下来,并更新种群。
第三,MOEA有很多具体的算法实现,其中比较经典的有NSGA-II、PAES、SPEA、MOEA/D等。
NSGA-II采用非支配排序和拥挤度距离来维护种群的多样性,并通过交叉和突变操作来生成新的个体。
PAES通过局部来改进解的质量,采用网格来表示解的空间,并根据适应度函数进行迁移。
SPEA使用非支配排序和密度估计来选择解,并通过交叉和突变操作来生成新的个体。
MOEA/D通过将多目标优化问题分解为多个子问题,并通过子问题之间的协作来帕累托最优解。
此外,MOEA还面临一些挑战和改进方向。
首先,MOEA需要解决多目标函数之间的冲突,如何在多个目标之间找到均衡点是一个难题。
其次,MOEA的计算复杂度通常比单目标优化方法更高,如何提高算法的效率是一个重要问题。
此外,MOEA在处理约束问题和高维问题时也存在挑战,如何有效处理这些问题也是一个改进方向。
转贴:多目标进化算法的性能指标总结(一)
转贴:多⽬标进化算法的性能指标总结(⼀)⼀、指标的常见分类⽅法:1.考虑指标同时能评估的解集数⽬(1个或2个解集),可将指标分为⼀元和⼆元指标。
⼀元指标:接受⼀个解集作为参数进⾏评估。
⼆元指标:接受两个解集作为参数,通过⽐较两个解集的⽀配关系或其他⽅⾯,给出哪个解集更好的判断。
2.多⽬标进化算法解集的性能评价指标主要分为三个⽅⾯:1)解集的收敛性评价(convergence), 反映解集与真实Pareto前沿之间的逼近程度(距离)。
⼀般我们希望所得解集距离PF尽可能近。
2)解集的均匀性评价(uniformity / evenness), 体现解集中个体分布的均匀程度。
⼀般我们希望所得解集在PF上分布尽可能均匀。
3)解集的⼴泛性评价(spread), 反映整个解集在⽬标空间中分布的⼴泛程度。
⼀般我们希望所得解集在PF上分布尽可能⼴、尽可能完整地表达PF。
也有⼀些学者,不这样分类,分为基数指标,收敛性指标,和多样性/分布性指标,认为多样性包括均匀性(evenness)和⼴泛性/范围(spread),具体如下:1)基数指标:评估解集中存在的解的个数。
2)收敛性指标(精确度指标):评估解集到理论帕累托最优前沿的距离(逼近程度)。
3)多样性指标:包括评估解集分布的均匀性(evenness)和⼴泛性/范围(spread)。
均匀性体现解集中个体分布的均匀程度;⼴泛性反映整个解集在⽬标空间中分布的⼴泛程度。
⼆、常⽤性能评价指标回顾:解集P中的每个点到参考集P *中的平均最⼩距离表⽰。
GD值越⼩,表⽰收敛性越好。
其中P是算法求得的解集,P _是从PF上采样的⼀组均匀分布的参考点,⽽dis(x,y)表⽰解集P中的点y和参考集P_中的点x之间的欧式距离。
优点:相⽐HV,计算代价是轻量级的。
缺点:1)仅度量解集的收敛性,⽆法评估多样性;2)需要参考集,使得这个测度很容易不客观;2.convergence metric γ:解集P中的每个点到参考集P *中的最⼩距离的平均值。
多目标进化算法
多目标进化算法
多目标进化算法(MOEA)是一种智能优化技术,用于解决带有多个目标的复杂优化问题。
它与单目标优化算法最大的不同在于,它可以同时优化多个目标函数。
多目标进化算法的设计主要集中在三个方面:种群初始化,适应度函数设计和更新策略。
种群初始化是多目标进化算法的第一步,它决定了多目标优化算法的初始状态。
在多目标优化算法中,一般采用随机策略来初始化种群。
具体而言,可以使用随机数发生器随机生成一组数据,并根据优化问题的要求,确定这些数据是否符合要求,然后将其作为种群的初始解。
适应度函数是多目标优化算法的核心,它负责对种群中每个个体进行评估,从而实现有效的进化。
多目标优化算法可以根据不同的优化目标设计不同的适应度函数,以更好地评估种群中每个个体的拟合度。
最后,多目标进化算法的更新策略是它的核心,它通过改变种群中每个个体的属性,使种群的整体质量得到改善。
多目标进化算法的更新策略可以采用相互作用策略,例如交叉、变异、选择等,以改善种群的整体质量。
总而言之,多目标进化算法是一种用于解决带有多个目标的复杂优
化问题的智能优化技术,它的设计集中在种群初始化、适应度函数设计和更新策略三个方面。
多目标进化算法的应用范围很广,它可以用于控制、计算机视觉、机器学习、模糊控制等领域。
多目标进化算法性能评价指标综述

多目标进化算法性能评价指标综述多目标进化算法(Multi-objective Evolutionary Algorithms,MOEAs)是一类优化算法,用于解决具有多个目标函数的多目标优化问题。
MOEAs在解决多目标优化问题上具有很强的适应性和鲁棒性,并在许多领域有着广泛的应用。
为了评价MOEAs的性能,人们提出了许多指标。
这些指标可以分为两类:一类是针对解集的评价指标,另一类是针对算法的评价指标。
首先,针对解集的评价指标主要用于从集合的角度评价解集的性能。
常见的解集评价指标有:1. Pareto前沿指标:衡量解集的覆盖度和质量。
Pareto前沿是指在多目标优化问题中不可被改进的解的集合。
Pareto前沿指标包括Hypervolume、Generational Distance、Inverted Generational Distance等。
2. 支配关系指标:衡量解集中解之间支配关系的分布情况。
例如,Nondominated Sorting和Crowding Distance。
3. 散度指标:衡量解集中解的多样性。
例子有Entropy和Spacing 等。
4.非支配解比例:衡量解集中非支配解的比例。
非支配解是指在解集中不被其他解支配的解。
除了解集评价指标,人们还提出了一些用于评价MOEAs性能的算法评价指标,例如:1.收敛性:衡量算法是否能找到接近最优解集的解集。
2.多样性:衡量算法是否能提供多样性的解。
3.计算效率:衡量算法是否能在较少的计算代价下找到高质量的解集。
除了上述指标,还有一些用于评价MOEAs性能的进阶指标,例如:1.可行性:衡量解集中的解是否满足的问题的约束条件。
2.动态性:衡量算法在动态环境中的适应性。
3.可解释性:衡量算法生成的解是否易于被解释和理解。
以上只是一些常用的指标,根据具体的问题和应用场景,还可以针对性地定义其他指标来评价MOEAs性能。
综上所述,MOEAs性能的评价是一个多方面的任务,需要综合考虑解集的质量、表示多样性以及算法的计算效率等方面。
多目标进化算法总结
MOGAi x 是第t 代种群中个体,其rank 值定义为:()(,)1t i i rank x t p =+()t i p 为第t 代种群中所有支配i x 的个体数目适应值(fitness value )分配算法:1、 将所有个体依照rank 值大小排序分类;2、 利用插值函数给所有个体分配适应值(从rank1到rank *n N ≤),一般采用线性函数3、 适应值共享:rank 值相同的个体拥有相同的适应值,保证后期选择时同一rank 值的个体概率相同最后采用共享适应值随机选取的方法选择个体进入下一代一种改进的排序机制(ranking scheme): 向量,1,(,,)a a a q y y y =⋅⋅⋅和,1,(,,)b b b q y y y =⋅⋅⋅比较 goal vector :()1,,q g g g =⋅⋅⋅ 分为以下三种情况:1、()(),,1,,1; 1,,;1,,; a i i a j j k q i k j k q y g y g ∃=⋅⋅⋅-∀=⋅⋅⋅∀=+⋅⋅⋅>∧≤2、(),1,,; a i i i q y g ∀=⋅⋅⋅>当a y 支配b y 时,选择a y 3、(),1,,; a j j j q y g ∀=⋅⋅⋅≤ 当b y 支配a y 时,选择b y优点:算法思想容易,效率优良 缺点:算法容易受到小生境的大小影响 理论上给出了参数share σ的计算方法NPGA基本思想: 1、初始化种群Pop2、锦标赛选择机制:随机选取两个个体1x 和2x 和一个Pop 的 子集CS (Comparison Set )做参照系。
若1x 被CS 中不少于一 个个体支配,而2x 没有被CS 中任一个体支配,则选择2x 。
3、其他情况一律称为死结(Tie ),采用适应度共享机制选择.个体适应度:i f小生境计数(Niche Count ):(),i j Popm Sh d i j ∈=⎡⎤⎣⎦∑共享函数:1-,()0,share shareshare d d Sh d d σσσ⎧≤⎪=⎨⎪>⎩共享适应度(the shared fitness ):iif m选择共享适应度较大的个体进入下一代优点:能够快速找到一些好的非支配最优解域 能够维持一个较长的种群更新期 缺点:需要设置共享参数需要选择一个适当的锦标赛机制限制了该算法的实际应用效果NPGA II基本思想: 1、初始化种群Pop2、Pareto 排序:非支配个体rank=0;其余个体 rank=支配该个体的个体数目3、锦标赛选择机制:种群中任选两个个体1x 和2x , 若()()12rank x rank x <,则选择1x ; 若是()()12rank x rank x =,称为死结(Tie ), 采用适应度共享机制选择。
多目标进化算法性能评价指标综述

多目标进化算法性能评价指标综述多目标进化算法是一类用于解决多目标优化问题的方法,在解决多目标优化问题时,通常需要考虑多个冲突的目标函数,因此评价多目标进化算法的性能需要使用一系列的指标来进行综合评估。
常用的多目标进化算法性能评价指标主要分为两类:质量指标和多样性指标。
本文将对这些性能评价指标进行综述。
一、质量指标1. 收敛性能收敛性能是指算法在确定的迭代次数内能够逼近最优解的能力。
通常可以使用收敛速度、收敛速率、收敛时间等指标来评价算法的收敛性能。
2. 收敛准确度收敛准确度是指算法得到的最优解与真实最优解的接近程度。
可以使用指标如Hypervolume、Inverted Generational Distance (IGD)、Epsilon Indicator等来评价算法的收敛准确度。
3. 支配解的比例支配解的比例是指在最终的非支配解集中,支配了其他解的解的比例。
该指标反映了算法得到的解的多样性和覆盖面。
一般情况下,支配解的比例越大,算法的性能越好。
4. 均衡性均衡性是指算法在多个目标之间能够平衡取得较好的解的能力。
通常可以使用指标如Spread、Generational Distance (GD)、Spacing等来评价算法的均衡性。
二、多样性指标1. 决策变量的多样性决策变量的多样性是指算法在搜索空间中得到的解的多样性。
可以使用指标如Crowding Distance来评价算法得到的解的决策变量的多样性。
对多目标进化算法的性能进行综合评价时,需要综合考虑其收敛性能、收敛准确度、支配解的比例、均衡性以及多样性等方面的指标。
应根据具体的多目标优化问题来选择适合的性能评价指标,以全面评估多目标进化算法在解决具体问题上的性能表现。
多目标进化算法

多目标进化算法多目标进化算法(Multi-Objective Evolutionary Algorithm, MOEA)是一种基于生物进化原理的优化算法,用于解决具有多个目标函数的复杂优化问题。
相比传统的单目标优化算法,MOEA可以同时考虑多个不同的目标函数,从而寻找到一组在不同目标下均表现良好的解。
MOEA的基本思想是通过维护一个种群,通过种群的进化过程来搜索解空间。
在每一代进化中,MOEA将根据种群中个体在目标函数空间中的分布和拥挤度来选择和进化新的个体。
具体来说,MOEA主要包含以下几个关键步骤:1. 个体编码:将优化问题的解空间映射到决策变量空间。
不同的编码方式可以用来表示不同类型的问题,如二进制编码、实数编码等。
2. 种群初始化:随机生成一组初始个体,每个个体都表示一个潜在解。
3. 目标函数计算:对于每个个体,计算其在所有目标函数下的目标值。
这些目标值用来衡量个体的优劣。
4. 选择操作:根据个体的目标值和分布情况,选择一部分个体作为“父代”。
5. 交叉和变异:通过遗传操作,对选择出的“父代”进行交叉和变异,生成新的个体。
6. 支配关系和非支配排序:通过比较个体的目标值来确定其在种群中的支配关系,进而进行非支配排序。
支配关系和非支配排序旨在找到在目标函数空间中最优的解。
7. 环境选择:根据个体的支配关系和非支配排序,选择新的种群,用于下一代的进化。
8. 结束条件检查:判断算法是否达到结束条件,如达到最大迭代次数或找到满意的近似最优解等。
MOEA的优点是能够找到一组解集,这些解集在多个目标下都表现较好。
同时,MOEA还可以通过适当的参数配置和改进,提高算法的搜索效率和解集的多样性。
然而,MOEA也存在一些挑战和限制。
首先,在处理高维和复杂的优化问题时,MOEA的搜索过程可能会变得非常复杂和耗时。
此外,MOEA在选择操作和父代个体生成方面,需要设计合适的策略利用个体之间的关系,以便更好地维持种群的多样性和收敛性。
几种多目标进化算法简介
NPGA II-Ranking
NPGA II-Niche Count
NPGA II – 总结评制选择个体进入下一代,出现tie则 使用共享机制 3. 计算个体的Niche Count,选择NC值较小的进入 下一代 1. 相对而言,效率不错(SGA和ERS),但也不算 很好 2. 不使用外部种群,精英保护机制类似于NSGA II
NSGA II-Sorting
NSGA II-Sorting
Crowded Comparison
Crowded Comparison
NSGA II-Main Loop
NSGA II-Main Loop
NSGA II-Main Loop
NSGA II-性能评价
a. 最优秀的多目标进化算法之一。
小生境技术的基本思想是将生物学中的小生境概念应 用于进化计算中,将进化计算中的每一代个体划分为若 干类,每个类中选出若干适应度较大的个体作为一个类 的优秀代表组成一个群,再在种群中,以及不同种群之 间,杂交、变异产生新一代的个体种群。
小生境(niche)
小生境计数(Niche Count) 用来估计个体 i 所有邻居(小生境内)的拥挤程度
个体支配关系
假设 x 和 y 是群体 P 中不同的两个个体,我们定义
x 支配(dominate) y ,如果满足下列条件:
(1)对所有子目标,都有 x 不差于 y ,
fk ( x) f k ( y), (k 1,2, , r )
(2)至少存在一项子目标,x 优于 y , 即, l {1, 2,
多目标进化算法
多目标进化算法
1. 绪论
2. 主要的多目标进化算法 3. 多目标进化算法性能评价和问题测试集
多目标进化算法性能评价指标综述

多目标进化算法性能评价指标综述随着多目标优化问题在实际应用中的广泛应用,多目标进化算法作为解决多目标优化问题的有效工具,受到了广泛关注。
为了评价多目标进化算法的性能,研究人员提出了许多性能评价指标。
这些指标旨在全面评价多目标进化算法在解决多目标优化问题时的性能表现,包括算法搜索能力、收敛速度、多样性维持能力等方面。
本文将综述多目标进化算法的性能评价指标,以便为研究人员在选择合适的指标进行性能评价提供参考。
1. 收敛性:指多目标进化算法找到最优解的速度。
包括了收敛速度和收敛精度两个方面。
收敛速度描述了算法找到最优解所需的迭代次数,收敛精度则描述了算法找到的最优解与真实最优解之间的距离。
2. 多样性:指多目标进化算法生成的个体之间的多样性程度。
多样性的高低影响着算法的全局搜索能力。
相对较高的多样性通常能够确保算法在整个搜索空间中均匀分布,从而有利于找到较好的解。
3. 支配关系的保持能力:支配关系是多目标优化问题中重要的概念,通过支配关系可以确定出优解。
多目标进化算法需要能够有效地保持支配关系,从而能够正确地找到优解。
4. 分布情况:多目标进化算法搜索到的解在目标空间中的分布情况。
分布情况可以反映出算法的搜索方向是否合理,是否能够均匀地覆盖整个目标空间。
5. 非支配解集的覆盖度:非支配解集是多目标优化问题中重要的概念,在解集中有效地覆盖非支配解是评价算法性能的重要指标。
6. 算法的收敛稳定性:指算法在搜索过程中的稳定性程度。
具有较高稳定性的算法能够在多次运行的情况下得到一致的结果。
1. 收敛速度指标(1)收敛代数:指算法找到最优解所需要的迭代代数,收敛代数越小则说明算法的收敛速度越快。
(2)收敛速度指标:包括了衡量算法收敛速度的指标,如ε-适应度和收敛距离等。
2. 多样性指标(1)种群多样性:包括了种群的熵值、均匀度、分散度等指标,用于描述种群个体之间的多样性程度。
(2)Pareto前沿的距离:用于描述Pareto前沿上解的分布情况,通常使用距离指标度量Pareto前沿上解的分散程度。
最新高维多目标进化算法总结
高维多目标进化算法二、文献选读内容分析及思考(一)Borg算法Borg算法是基于ε-MOEA算法(Deb,2003)的一种全新改进算法[32],下面将从创新点、原理、算法流程和启发思考四方面进行阐述。
1. 创新点1)在ε支配关系的基础上提出ε盒支配的概念,具有能同时保证算法收敛性与多样性的特点。
2)提出了ε归档进程,能提高算法计算效率和防止早熟。
3)种群大小的自适应调整。
4)交叉算子的自适应选择。
由于处理实际问题时,是不知道目标函数具有什么特性,前沿面如何,在具有多个交叉算子的池子里,根据进程反馈,选择不同的交叉算子,使产生的后代具有更好的特性针对要研究的问题。
2. Borg算法原理1)ε盒支配:通过对目标空间向量的每一维除以一个较小的ε,然后取整后进行pareto支配比较。
这样的支配关系达到的效果是把目标空间划分成以ε为边长的网格(2目标时),当点处于不同的网格时,按pareto支配关系比较;当处于同一网格时,比较哪个点距离中心点(网格最左下角)最近。
这样一来,网格内都只有一个点。
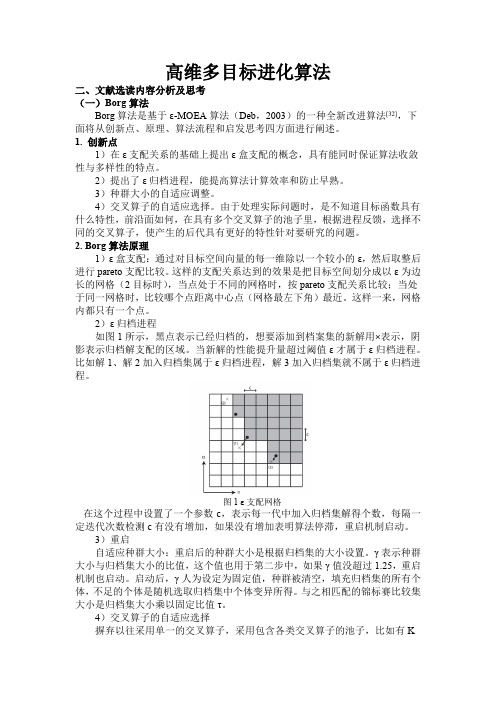
2)ε归档进程如图1所示,黑点表示已经归档的,想要添加到档案集的新解用×表示,阴影表示归档解支配的区域。
当新解的性能提升量超过阈值ε才属于ε归档进程。
比如解1、解2加入归档集属于ε归档进程,解3加入归档集就不属于ε归档进程。
图1 ε支配网格在这个过程中设置了一个参数c,表示每一代中加入归档集解得个数,每隔一定迭代次数检测c有没有增加,如果没有增加表明算法停滞,重启机制启动。
3)重启自适应种群大小:重启后的种群大小是根据归档集的大小设置。
γ表示种群大小与归档集大小的比值,这个值也用于第二步中,如果γ值没超过1.25,重启机制也启动。
启动后,γ人为设定为固定值,种群被清空,填充归档集的所有个体,不足的个体是随机选取归档集中个体变异所得。
与之相匹配的锦标赛比较集大小是归档集大小乘以固定比值τ。
4)交叉算子的自适应选择摒弃以往采用单一的交叉算子,采用包含各类交叉算子的池子,比如有K种交叉算子,选择概率最开始是相等的,设n表示各类交叉算子产生的后代属于ε归档进程所得个数,个数越多,选取相应交叉算子的概率就越大,逐渐趋于选择解决未知现实问题的交叉算子。
多目标进化算法总结

多目标进化算法总结多目标进化算法是一种用于解决多目标优化问题的计算方法。
它通过模拟生物进化过程中的自然选择、交叉和突变等操作,对问题进行多次迭代优化,以找到一组平衡解集,从而提供决策者从多个方面进行选择的可能性。
以下是一个关于多目标进化算法的总结,包括其基本原理、常用算法及应用领域。
首先,多目标进化算法的基本原理是受到达尔文的演化论和自然选择理论的启发。
它将问题转化为一个多目标优化问题,其中存在多个决策变量和多个目标函数,目标函数之间可能存在相互冲突的关系。
多目标进化算法通过维护一个种群,并使用评估函数对种群进行适应度评估,将适应度高的个体作为“优良”的进化方向进行选择、交叉和突变等操作。
通过多次迭代,算法不断优化得到一组平衡解集,这些解集代表了问题的不同权衡取舍方案,决策者可以从中选择最优解。
目前,常用的多目标进化算法包括非支配排序遗传算法(NSGA)、快速非支配排序遗传算法(NSGA-II)、多目标粒子群优化算法(MOPSO)、多目标差分进化算法(MODE)等。
这些算法都基于遗传算法的核心思想,并在适应度评估、选择、交叉和突变等方面进行了改进。
例如,NSGA-II采用非支配排序策略和拥挤度距离,以保持种群的多样性。
MOPSO引入了粒子群优化的思想,通过粒子的位置和速度来表示解的状态和进化方向。
MODE则利用差分进化的策略,通过变异和交叉操作来更新种群。
多目标进化算法具有广泛的应用领域。
首先,在工程设计领域,多目标进化算法可以应用于多目标优化问题的求解,如结构优化、参数优化等。
其次,在组合优化问题中,多目标进化算法可以用于求解旅行商问题、背包问题等。
此外,在规划和调度问题中,多目标进化算法可以用于求解资源分配、任务调度等问题。
另外,多目标进化算法还可以在金融投资领域中应用于资产配置、投资组合优化等问题。
总的来说,多目标进化算法是一种有效的求解多目标优化问题的方法,它通过模拟生物进化的过程,利用选择、交叉和突变等操作对问题解空间进行。
3多目标进化算法

3多目标进化算法多目标进化算法(Multi-objective Evolutionary Algorithms, MOEAs)是一类应用于解决多目标优化问题的算法。
与传统的单目标优化算法不同,MOEAs可以同时优化多个冲突的目标函数。
本文将介绍三种常见的多目标进化算法:非支配排序遗传算法(Non-dominated Sorting Genetic Algorithm, NSGA)、多目标粒子群优化算法(Multi-Objective Particle Swarm Optimization, MOPSO)和多目标遗传编程算法(Multi-objective Genetic Programming, MOGP)。
非支配排序遗传算法(NSGA)是最早被提出的多目标进化算法之一、该算法通过将个体划分为不同的非支配等级来进行演化,其中非支配等级越小的个体被认为越好。
算法首先根据个体之间的非支配关系对当前个体进行排序,随后通过选择、交叉和变异操作生成下一代个体。
NSGA尝试以一种平衡的方式维持每个非支配等级的个体数量,并保留个体的多样性。
多目标粒子群优化算法(MOPSO)是一种基于粒子群优化算法的多目标优化算法。
在传统的粒子群优化算法中,每个粒子通过自身的历史最优解和全局最优解来更新速度和位置。
而在MOPSO中,每个粒子有多个非劣解集合,通过使用非支配排序算法来选择粒子的周围邻居。
该算法通过比较不同粒子之间的非劣解集合来进行演化,以获取更好的近似解集。
多目标遗传编程算法(MOGP)是基于遗传算法的一种进化算法,用于解决多目标优化问题。
在MOGP中,每个个体表示为一个程序或函数,通过选择、交叉和变异操作来生成下一代个体。
与传统的遗传编程算法不同,MOGP通过使用多目标适应度函数来评估个体的多目标优劣,而不是使用单个适应度函数。
MOGP通过演化生成一组多目标解,并尽可能保留解空间的多样性和均匀分布。
这三种多目标进化算法在解决多目标优化问题方面具有一定的优势和适用性。
多目标进化算法性能评价指标综述

多目标进化算法性能评价指标综述多目标进化算法是一种解决多目标优化问题的有效方法,它通过维护一组候选解来逼近问题的最优解集合。
在实际应用中,如何评价多目标进化算法的性能成为一个重要的问题。
本文将对多目标进化算法的性能评价指标进行综述,并对其进行详细介绍。
多目标进化算法的性能评价指标可以分为三个方面:收敛性、多样性和均衡性。
收敛性指标用于评估算法是否能够在有限的迭代次数内逼近问题的最优解集合。
多样性指标用于评估算法生成的解是否具有广泛的分布,而不仅仅局限于某个部分。
均衡性指标用于评估算法生成的解在各个目标上的性能平衡程度。
下面将对每个指标进行详细介绍。
首先是收敛性指标。
常用的收敛性指标有Hypervolume、Inverted Generational Distance (IGD) 和Generational Distance (GD)。
Hypervolume指标衡量了算法生成的解与真实最优解之间的面积差异,目标是最小化该指标。
IGD指标衡量了算法生成的解与真实最优解之间的距离,目标是最小化该指标。
GD指标衡量了算法生成的解与真实最优解之间的平均距离,目标是最小化该指标。
其次是多样性指标。
常用的多样性指标有Spacing和Crowding Distance。
Spacing指标衡量了算法生成解之间的平均距离,目标是最大化该指标。
Crowding Distance指标衡量了算法生成解之间的密度,目标是最大化该指标。
多目标进化算法的性能评价指标可以从收敛性、多样性和均衡性三个方面进行评价。
不同的指标适用于不同的问题和算法,选择适合的性能指标可以更准确地评价多目标进化算法的性能。
在实际应用中,可能需要综合考虑多个指标来对算法进行全面评价。
对多目标进化算法的性能评价研究有助于改进算法的设计和参数设置,提高算法求解效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
x 是第 t 代种群中个体,其 rank 值定义为: rank (x ,t )=1+p (t ) p (t )为第t 代种群中所有支配x 的个体数目 适应值(fitness value )分配算法:1、 将所有个体依照 rank 值大小排序分类;2、 利用插值函数给所有个体分配适应值(从 rank1 到rank n * N ),一般采用线性函数3、 适应值共享:rank 值相同的个体拥有相同的适应值,保证后期选择时同一 rank 值的个体概率相同最后采用共享适应值随机选取的方法选择个体进入下一代一种改进的排序机制(ranking scheme ): 向量y a=(y a ,1,,y a ,q )和y b =(y b ,1,,y b ,q )比较分为以下三种情况: k =1,,q -1; i =1,,k ; j =k +1,,q ; (y a ,i g i )(y a ,j g j )i =1,,q ; (y a ,i g i )当 y a 支配 y b 时,选择 y a 3、j =1,,q ; (y a ,j g j )当 y b 支配 y a 时,选择 y b 优点:算法思想容易,效率优良 缺点:算法容易受到小生境的大小影响 理论上给出了参数share 的计算方法 goal vector : g = (g 1,,g q )1、 2、基本思想:1、初始化种群 Pop2、锦标赛选择机制:随机选取两个个体 x 和 x 和一个 Pop 的子集 CS(Comparison Set)做参照系。
若 x 被 CS 中不少于一个个体支配,而 x 没有被 CS 中任一个体支配,则选择x 。
3、其他情况一律称为死结(Tie ),采用适应度共享机制选择。
个体适应度: f i小生境计数(Niche Count ): m =j Pop Shd (i , j )共享适应度(the shared fitness ): 选择共享适应度较大的个体进入下一代 优点:能够快速找到一些好的非支配最优解域 能够维持一个较长的种群更新期 缺点:需要设置共享参数 需要选择一个适当的锦标赛机制 限制了该算法的实际应用效果 1- 共享函数: Sh (d ) = d share 0,d shared shareNPGA II基本思想:1、初始化种群 Pop2、Pareto 排序:非支配个体 rank=0;其余个体 rank=支配该个体的个体数目3、锦标赛选择机制:种群中任选两个个体 x 和 x , 若rank (x ) rank ( x ) ,则选择x ; 若是 rank ( x ) =rank ( x ) ,称为死结(Tie ), 采用适应度共享机制选择。
小生境计数(Niche Count ):if d ij share这里的 Pop 只包含当前一代里的个体,在 NPGA 中, 计算m公式中的 Pop 包含当前一代以及已经产生的 属于下一代的所有个体 最后,选择计数较小的个体进入下一代在计算 Niched Count 之前还要对函数值进行标准化:m =if dij shareNSGA和简单的遗传算法的不同点在于 selection operator works , crossover and mutation operator 是一样的不一样的共享函数:d i , j 表示个体i 和j 之间的距离share 是共享参数,表示小生境的半径小生境计数(Niche Count ): m = Sh d (i , j )最后采用随机余数比例算法选择个体进行重新构造种群的基础 优点:优化目标个数任选 非支配最优解分布均匀 允许存在多个不同的等效解 缺点:计算复杂度过高(O (MN 3)) 不具有精英保留机制 需要预设共享参数shareSh (d i ,j )= 1- 0,if d i ,j shareotherwised i , jNSGA II加入精英保留机制快速非支配排序方法(Fast Nondominated Sorting Approach ): 支配计数 n p :支配解 p 的解数量 支配解集 S p :解 p 支配的解集合1、计算出每一个解的n p 和S p ,第一级非支配解n p = 0 ,单独放入一个集合;2、遍历成员q 和S q ,逐步递减n q ,如果可以减少为 0,将p 放入单独的集合Q , 构成第二级非支配解;3、重复步骤 2,直到所有成员全部分类完成。
1、计算集合 I 的长度,初始化;2、对每一个目标,利用目标值进行排序;3、赋予边界点(第一个和最后一个)最大值,确保它们不会被剔除;4、循环计算其他点的 crowded distance.I i =I i dis tan ce dis tan ce 其中,I 为非支配集合, I i .m 表示第 m 个目标在第 i 个个体处的目标值,f m max / f m min 分别表示第m 个目标的最大最小函数值值越小,越拥挤Crowded-Comparison Operator : p i p n j if (i rank j rank ) or ((i rank = j rank ) and (i dis tan ce j dis tan ce ))Replace the sharing function approach in NSGA 可以一定程度上消除一下两点:(1)the sharing function 太过于依赖共享参数,不容易设定(2)the sharing function 时间复杂度达到O (N 2 )Crowded-comparison Approachminm(I i +1.m - I i -1.算法主循环:1、初始种群P ( size = N ),并利用binary tournament selection, recombination andmutation operators 构建一个子代种群Q ( size = N);2、合并P0和Q0 ,记R0 =P0+Q0第t 代:合并P t和Q t,记R t =P t +Q t 对R t进行非支配分类,结果记作F =(F1,F2,) 循环计算crowded distance of F,并入P 对当前F i进行crowded distance 排序,选择前(N-|P t+1|)个成员并入P t+1,确保|P t+1|= N利用binary tournament selection, recombination and mutation operators 构建Q 进入下一次循环SPEACharacters:a)Storing nondominated solutions externally in a second, continuously updated populationb)Evaluating an individual's fitness dependent on the number of external nondominated points that dominate itc)Preserving population diversity using the Pareto dominance relationshipd)Incorporating a clustering procedure in order to reduce the nondominated set without destroying its characteristicsSteps:1)Generate an initial population P and create the empty external nondominated set P'.2)Copy nondominated member of P to P '.3)Remove solutions within P ' which are covered by any other member of P '.4)If the number of externally stored nondominated solutions exceeds a given maximum N', prune P' by means of clustering.5)Calculate the fitness of each individual in P as well as in P '.6)Select individuals from P+ P ' (multiset union), until the mating pool is filled. In this study, binary tournament selection with replacement is used.7)Apply problem-specific crossover and mutation operators as usual.8)If the maximum number of generations is reached, then stop, else go to Step 2. Fitness Assignment:1) 外部群落i P'赋值s 0,1),称作strength,和j P的数量成正比,i f j n定义:s =i N + 1适应值f i =s i2)当前群落j Pf j =1+s i, where f 1, N ) .i,i f j其中i P ',适应值加1是为了确保外部群落的个体适应值优于当前群落这里适应值越小,被选中的概率越大(small fitness values correspond to high reproduction probabilities)聚簇缩减:1)Initialize cluster set C; each external nondominated point i P' constitutes a distinct cluster: C= U i i.2)If |C |N', go to Step 5, else go to Step 3.3)Calculate the distance of all possible pairs of clusters. The distance d of two clusters c and c C is given as the average distance between pairs of individuals across the two clustersd =1g || i -i ||d =| c1 |g| c2 |g i1c1,i2c2||i1 - i2 ||where the metric || • || reflects the distance between two individuals i and i (in this study an Euclidean metric on the objective space is used)4)Determine two clusters c and c with minimal distance d; the chosen clusters amalgamate into a larger cluster: C =C \c ,c c c. Go to Step 2. 5)Compute the reduced nondominated set by selecting a representative individual per cluster. We consider the centroid (the point with minimal average distance to all other points in the cluster) as representative solution.优点:SPEA IISPEA 可改进点:1)Fitness Assignment当P' 成员只有一个时,P 中所有成员的适应值都是相同的。