台达通讯示范程序及说明
台达通讯示范程序及说明
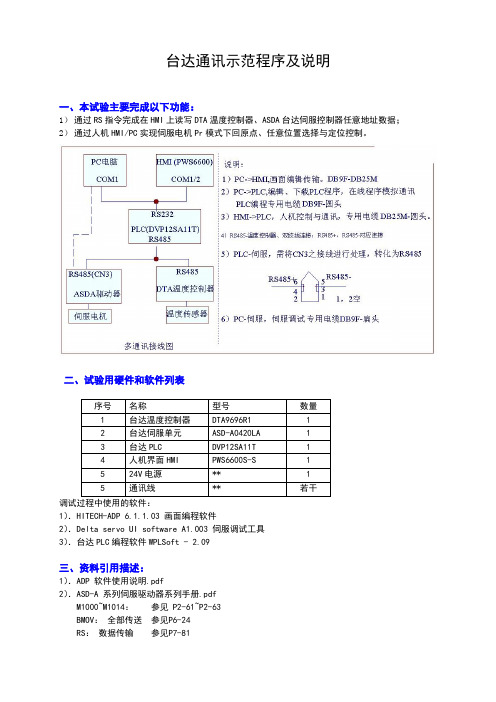
台达通讯示范程序及说明一、本试验主要完成以下功能:1)通过RS指令完成在HMI上读写DTA温度控制器、ASDA台达伺服控制器任意地址数据;2)通过人机HMI/PC实现伺服电机Pr模式下回原点、任意位置选择与定位控制。
二、试验用硬件和软件列表序号名称型号数量1台达温度控制器DTA9696R112台达伺服单元ASD-A0420LA13台达PLC DVP12SA11T14人机界面HMI PWS6600S-S1524V电源**15通讯线**若干调试过程中使用的软件:1).HITECH-ADP 6.1.1.03 画面编程软件2).Delta servo UI software A1.003 伺服调试工具3).台达PLC编程软件WPLSoft - 2.09三、资料引用描述:1).ADP 软件使用说明.pdf2).ASD-A 系列伺服驱动器系列手册.pdfM1000~M1014:参见 P2-61~P2-63BMOV:全部传送参见P6-24RS:数据传输参见P7-81ASCI:HEX转为ASCII 参见P7-97HEX:ASCII转为HEX 参见P7-102CCD:校验码参见P7-1053)台达温度控制器DTA系列操作手册四.程序中的关键部分编写思路1)“二补码”的计算:一个8位十六进制数(如**H)的二补码的计算方法是:FFH-**H+01H=100H-**H2)编程的时候请参考章节(RS:数据传输参见P7-81)ASCII表3)下面我们以写数据为例来说明编程思路如下图所示,在PLC启动正向RUN的瞬间,写入初始化数值(图中左列所示);由人机界面输入16进制数地址(如4700H),通过ASCI指令将其每一位转化为ASCII码存放到D60(D80)开始的4个数据寄存器中,然后通过BMOV指令送到D105…D108(D109…D112)中。
数据传入以后,从地址ADR1/0开始,两个一组依次相加计算校验码(见程序说明)。
台达 说明书07-通讯联机模式
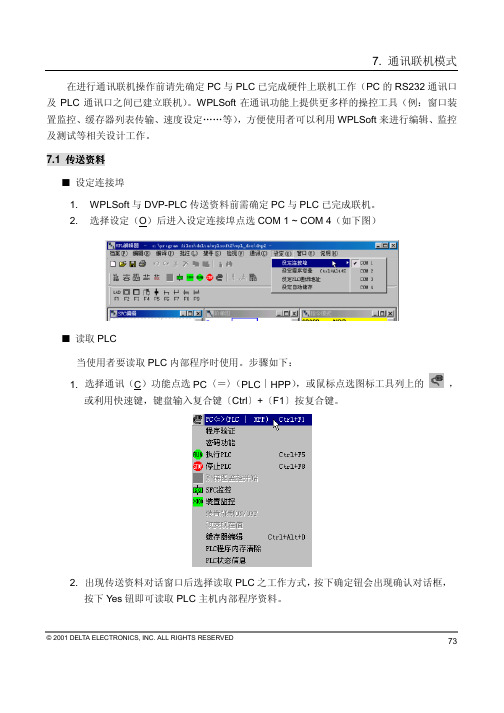
在进行通讯联机操作前请先确定PC与PLC已完成硬件上联机工作(PC的RS232通讯口及PLC通讯口之间已建立联机)。
WPLSoft在通讯功能上提供更多样的操控工具(例:窗口装置监控、缓存器列表传输、速度设定……等),方便使用者可以利用WPLSoft来进行编辑、监控及测试等相关设计工作。
7.1 传送资料设定连接埠1. WPLSoft与DVP-PLC传送资料前需确定PC与PLC已完成联机。
2. 选择设定(O)后进入设定连接埠点选COM 1 ~ COM 4(如下图)读取PLC当使用者要读取PLC内部程序时使用。
步骤如下:1. 选择通讯(C)功能点选PC〈=〉(PLC∣HPP),或鼠标点选图标工具列上的,或利用快速键,键盘输入复合键〔Ctrl〕+〔F1〕按复合键。
2. 出现传送资料对话窗口后选择读取PLC之工作方式,按下确定钮会出现确认对话框,按下Yes钮即可读取PLC主机内部程序资料。
© 2001 DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED 7374写入PLC1. 使用者执行WPLSoft自磁盘读取一项目或由阶梯图编辑、指令编辑设计一个新的PLC程序,要传送至DVP-PLC主机时,选择通讯(C)功能点选PC〈=〉(PLC∣HPP),或鼠标点选图标工具列上的,或利用快速键,键盘输入复合键〔Ctrl〕+〔F1〕。
2. 于传送资料(*注一)对话窗口选择写入PLC工作方式;WPL提供2种传送方式:全部传送与部分传送。
全部传送:将WPLSoft目前程序区内存全部写入DVP-PLC主机(如下图)。
部分传送:由使用者设定欲传送之程序区内存的起始及结束地址,将此部分程序写入DVP-PLC主机(如下图)。
© 2001 DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED© 2001 DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED75*注一:在执行写入功能前,必须注意PLC 必须在停止(STOP )的状态,若PLC 为运行(RUN )状态,则WPLSoft 会发出PLC 执行中禁止写入的警告讯息(如下图)。
台达plc网口通讯程序
台达plc网口通讯程序在现代工业自动化系统中,PLC(可编程逻辑控制器)是扮演着重要角色的设备。
而台达PLC凭借其稳定可靠、功能强大的特点,在工业自动化领域备受青睐。
在台达PLC的应用中,网口通讯程序是不可或缺的一部分。
本文将对台达PLC网口通讯程序进行探讨,帮助读者更好地了解这方面的知识。
首先,让我们来理解什么是台达PLC的网口通讯程序。
网口通讯程序是指通过PLC的网口与其他设备进行数据交换和通信的程序。
PLC的网口通讯程序可以实现与计算机、传感器、执行器等设备之间的数据传输和交换,使工业自动化系统能够更加高效地运行。
在台达PLC中,网口通讯程序可以使用多种协议,如Modbus、Ethernet/IP等,以满足不同应用需求。
接下来,我们将重点介绍一种常用的台达PLC网口通讯程序——Modbus协议。
Modbus协议是一种通信协议,用于在不同设备之间传输数据。
在台达PLC中,Modbus协议可通过串口或网口进行数据传输。
在使用Modbus协议进行网口通讯时,PLC可以作为主站或从站。
主站负责发送请求数据,从站负责接收和响应请求。
编写台达PLC的网口通讯程序需要以下几个步骤。
首先,需要进行硬件连接。
将PLC的网口与其他设备的网口相连,确保连接稳定可靠。
然后,在PLC的编程软件中进行相应的配置。
根据通讯协议的要求,设置PLC的通讯参数,如通讯地址、波特率等。
接下来,编写通讯程序。
根据具体的需求,编写读取数据、发送数据等函数,以完成数据的交换和通信。
最后,进行测试和调试。
通过对通讯程序的测试和调试,确保程序的稳定性和可靠性。
需要注意的是,在编写台达PLC的网口通讯程序时,应考虑以下几个方面。
首先,要遵循通讯协议的规范和要求。
根据不同的通讯协议,遵循相应的数据格式和传输规则,以确保数据的正确传输和解析。
其次,要考虑网络的稳定性和安全性。
网络环境可能存在噪声、干扰等问题,因此应采取相应的措施,如使用防干扰线缆、设置网络安全策略等,以确保通讯的稳定和可靠。
台达PLC通讯调试方法
台达PLC通讯调试方法。
你的串口协议是对的,与PLC的默认协议完全相符,PLC不用再作协议设定。
你发送的数据中有几个错误:1、尾码不是0A0D,而应是0D0A。
正确的字符串数据是=":"+"010*******"+LRC码("EA")+CR(0D)+LF(0A)我已经试过了,返回数据是=":01810777" (3A 30 31 38 31 30 37 37 37 0D 0A)我是一个PLC初学者,在Micro Programmable Logic Controller FC4A使用手册中,遇到一个问题:在17-2中电缆线连接器脚位表格下,有一个“注:准备连接埠1的电缆显示,请不要插入第6和7针。
如果第6和7针连接在一起,便无法使用使用者通讯。
”但是现在所配制的电缆就是第6和7针之间的电阻值接近于0。
在WindLDR中,简单输入输出和定时、计数器可以编程并下载到PLC中正常运行,在使用TXD和RXD指令时按照手册中所述进行梯形图编程时,无法运行,接收状态码显示15,无法进行串行通讯。
我用1:1进行PC对PLC通讯.用pc控制plc原理上是一样的,你只要先将pc得端口初始化为和plc一样的通讯协议,然后往plc相对应的地址写数就好了。
不过,这时候plc地址就不是dxxx/mxxx他们对应的地址如下:S S0 ~S1028 0000H~03FFH Bit X X0~X377(Octal) 0400H~04FFH Bit Y Y0~Y377(Octal) 0500H~05FFH Bit T T0~T255 0600F~06FFH Bit/Word M M0~M4095 0800H~B9FFH Bit D D0~D9999 1000H~A70FH Word C C0~C199 0E00H~0EC7H Bit/Word C C199~C255 0EC8H~0EFFH Bit/Dword 台达的地址都是开放的,除了d1000-d1999/m1000-m1999中间有些地址是唯读的,大家不能修改外,其余应该都没问题,如果控制不了,可能是是地址错了。
配合台达PLC MODBUS例程

01 10 60 81 00 02 04 00 64 00 00 XX XX(XX XX位CRC校验,指令会自动附加在程序后面)
说明:当M1为ON时,通PLC的COM1写入D100中的数据到1号从站寄存器地址0x6000中。当数据接收完毕后,置位M2为ON,通PLC的COM1写入D101-D102中的数据到1号从站寄存器地址0x6081中。
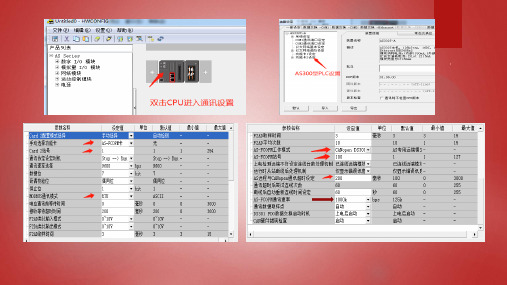
打开台达ISPSoft编程软件→选择PLC的CPU型号
设置通信参数
双击HWCONFIG→再双击PLC图标→选择通讯的COM口→设置通信参数→确定
从站参数:Modbus-RTU模式,数据位8,停止位1,无奇偶校验。
以上参数,从站是默认的,不能修改,主站设置需和从站一致,不一致则通信失败。
波特率可根据实际需求调整,但主、从站也需一致。(从站波特率设置请参考对应产品硬件手册)
注:此变更功能不会修改HWCONFIG所设定之原始参数;
当PLC断电后再重新上电,通讯端口将执行HWCONFIG
所设定之参数。
用户设定
系ห้องสมุดไป่ตู้清除
示例程序
送信标志
每触发一个指令都需要置位送信标志,数据传送完成后该标志系统会自动清除。
功能码
01 03 60 41 00 06 XX XX(XX XX位CRC校验,指令会自动附加在程序后面)
4、S:欲读写之数据(Source or Destination)。由用户设定寄存器,将欲写入数据长度的数据事先存入寄存器内。或数据读取后存放之寄存器。
5、n:读写数据长度(Data Length)。当使用word类型通讯功能码时,设定的数据量不可以大于100 words。
6、本指令于程序中使用次数并无限制,但是不同通讯指令,在同一时间使用相同的通讯端口时,仅会只有一个指令被执行。另外搭配各通讯口的发送标志时,也需特别注意得要在此指令的前一行设定,否则容易造成2个通讯口各自独立的通讯数据互相混用的情况。
台达PLC通讯控制伺服教程
以下
修改监控时间,延长通讯时间
-
原点回归伺服软件设置:(原点复归模式设置) 1;点击原点复归模式 2;P-04原点复归模式选择X,Y,Z 3;原点复归速度设定,第一段p505速度设置,第二段速度 4;路径形式(选路径10)
-
原点回归伺服软件设置:(路径10设置) 1;点击原点复归模式 2;选择到路径10(路径10设置为回零点进行设置) 3;选TYPE路径型式 4;选位置命令 5;选运行速度 6;p621待机位给定目标位置
-
台达PLC以Canopen控制伺服
在线描硬件,
SDO自动配置
-
SDO配置内容
-
SDO设置;p3-06(伺服DI来源设定3F1F) SDO自动 POD设置; 写; P4-05 (JOG手动控制) RX1400 属性设置为异步255 P4-07 (DI控制外部端子控制P2-10—P2-17设定端子功能) RX1401
-
自动SDO配置:在Index(hex):选择 (P3-06)在数据(hex)输入 (1F3F),点击确认后在显示(3F1F),P3-06用于确定P4-07位功能。
-
PDO配置
-
PDO配置Biblioteka -P4-07位控制定义
-
-
-
-
伺服通过软件设置站号、通信格式、波 特率
-
电子齿轮比的设置
-
伺服软件DI/DO功能选择; A/B为常开、常闭切换。
台达PLC和昆仑通态触摸屏通讯设置带程序及通信线制作说明
台达PLC和昆仑通态触摸屏通讯设置
台达PLC和触摸屏通讯关键是通讯参数的设置。
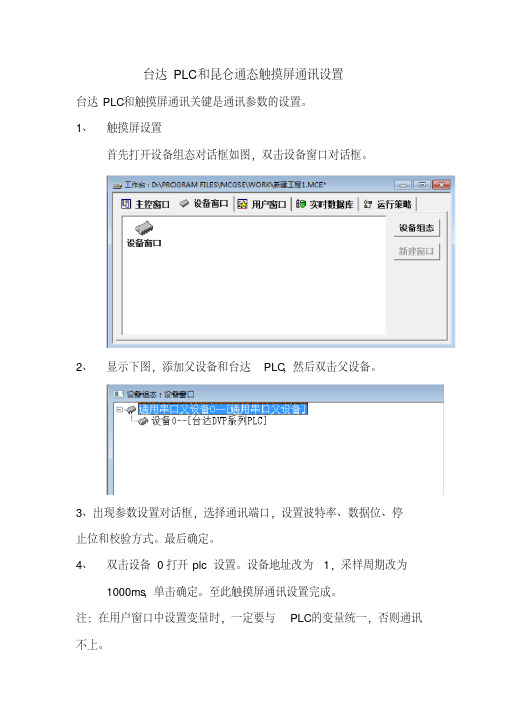
1、触摸屏设置
首先打开设备组态对话框如图,双击设备窗口对话框。
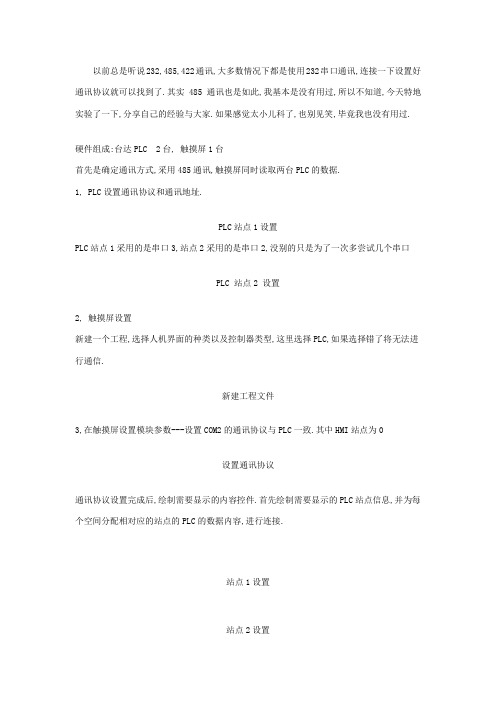
2、显示下图,添加父设备和台达PLC,然后双击父设备。
3、出现参数设置对话框,选择通讯端口,设置波特率、数据位、停
止位和校验方式。
最后确定。
4、双击设备0打开plc设置。
设备地址改为1,采样周期改为
1000ms,单击确定。
至此触摸屏通讯设置完成。
注:在用户窗口中设置变量时,一定要与PLC的变量统一,否则通讯不上。
台达PLC通讯参数设置。
1、台达PLC自带有通讯程序,点击向导下面的通讯程序,出现下图
选择
COM2单击确定。
2、出现PLC通讯参数设置对话框
里面的数据位、停止位还有校验位一定要与触摸屏设置完全一样,而且通讯站号打钩,也要与触摸屏设置成一样的站号。
条件式LD X 0可改为M1000。
点击下一步
3.
选择MODBUS数据传输
4.置条件输入,可视情况而定,单击完成。
通讯设置完成。
5.点击完成后程序里会增加以下程序。
6.通信线制作:
台达PLC485口的+和-分别和昆仑通态触摸屏的7和8脚焊接。
台达触摸屏和多台plc485通讯教程
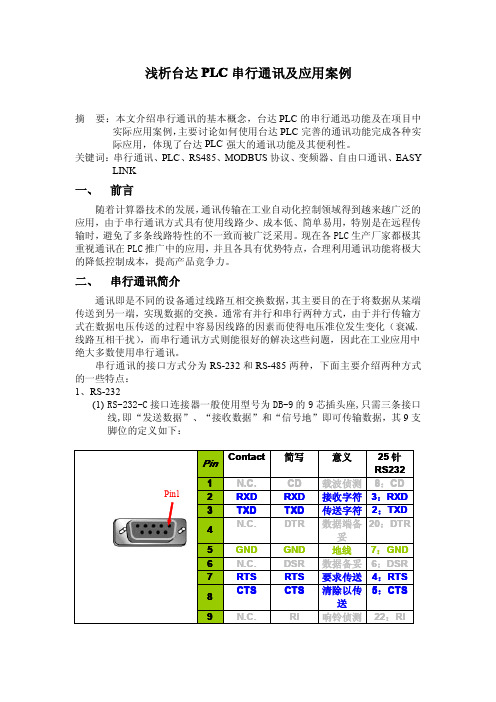
以前总是听说232,485,422通讯,大多数情况下都是使用232串口通讯,连接一下设置好通讯协议就可以找到了.其实485通讯也是如此,我基本是没有用过,所以不知道,今天特地实验了一下,分享自己的经验与大家.如果感觉太小儿科了,也别见笑,毕竟我也没有用过.
硬件组成:台达PLC 2台, 触摸屏1台
首先是确定通讯方式,采用485通讯,触摸屏同时读取两台PLC的数据.
1, PLC设置通讯协议和通讯地址.
PLC站点1设置
PLC站点1采用的是串口3,站点2采用的是串口2,没别的只是为了一次多尝试几个串口
PLC 站点2 设置
2, 触摸屏设置
新建一个工程,选择人机界面的种类以及控制器类型,这里选择PLC,如果选择错了将无法进行通信.
新建工程文件
3,在触摸屏设置模块参数---设置COM2的通讯协议与PLC一致.其中HMI站点为0
设置通讯协议
通讯协议设置完成后,绘制需要显示的内容控件.首先绘制需要显示的PLC站点信息,并为每个空间分配相对应的站点的PLC的数据内容,进行连接.
站点1设置
站点2设置
设置完成后,检查每个控件对的地址是否正确.看右上角读取存储器的地址
检查存取地址 1
检查存取地址 2
检查完毕进行联机运行,查看显示是否正确.
这个是所有的产品都是台达的情况下,看起来设置比较简单,并没有想象的那么复杂.改天如果能够遇到个不是台达的产品,单独使用触摸屏或者PLC用485读取数据看看,在于大家分享.
附硬件连线。
浅析台达PLC串行通讯及应用案例
浅析台达PLC串行通讯及应用案例摘要:本文介绍串行通讯的基本概念,台达PLC的串行通迅功能及在项目中实际应用案例,主要讨论如何使用台达PLC完善的通讯功能完成各种实际应用,体现了台达PLC强大的通讯功能及其便利性。
关键词:串行通讯、PLC、RS485、MODBUS协议、变频器、自由口通讯、EASY LINK一、前言随着计算器技术的发展,通讯传输在工业自动化控制领域得到越来越广泛的应用,由于串行通讯方式具有使用线路少、成本低、简单易用,特别是在远程传输时,避免了多条线路特性的不一致而被广泛采用。
现在各PLC生产厂家都极其重视通讯在PLC推广中的应用,并且各具有优势特点,合理利用通讯功能将极大的降低控制成本,提高产品竞争力。
二、串行通讯简介通讯即是不同的设备通过线路互相交换数据,其主要目的在于将数据从某端传送到另一端,实现数据的交换。
通常有并行和串行两种方式,由于并行传输方式在数据电压传送的过程中容易因线路的因素而使得电压准位发生变化(衰减、线路互相干扰),而串行通讯方式则能很好的解决这些问题,因此在工业应用中绝大多数使用串行通讯。
串行通讯的接口方式分为RS-232和RS-485两种,下面主要介绍两种方式的一些特点:1、RS-232(1)RS-232-C接口连接器一般使用型号为DB-9的9芯插头座,只需三条接口线,即“发送数据”、“接收数据”和“信号地”即可传输数据,其9支脚位的定义如下:(2)在RS232的规范中,电压在+3V---+15V(一般使用+6V)之间称为“0”或“ON”;电压在-3V----15V(一般使用-6V)之间称为“1”或“OFF”;计算机上的RS-232“高电位”约9V,而“低电位”则约-9V。
(3)RS-232为全双工工作模式,其讯号准位是参考地线而得,分别作为数据的传送和接收;实际应用中其传输距离可以达到15米。
只具有单站功能,即一对一通讯。
2、RS485(1)采用正负两根信号线作为传输线路。
台达VFD通讯规范标准示范

台达VFD-B变频器串口通信中,频率设定,还有正转、反转、停止字符串是怎样写?范例1:设定VFD-B系列变频器的频率为30.00Hz,通讯格式为9600,8,N,2,RTU01 06 2001 0BB8 D488范例2:设定VFD-B系列变频器正转,通讯格式为9600,8,N,2,RTU01 06 2000 0022 0213范例3:设定VFD-B系列变频器停止,通讯格式为9600,8,N,2,RTU01 06 2000 0001 43CA西门子与台达变频器通讯ORGANIZATION_BLOCK 主程序:OB1TITLE=实现S7-200 PLC与台达变频器通信// 实现功能是PLC通过RS485通信控制变频器的正转启动、反转启动、停止、加速、减速和读取输出频率。
变频器通过Modbus通信方式进行// 要求台达变频器设置基本通信参数:// P00=d03(主频率由RS485控制)// P01=d03(运转/停止由RS485通信控制)// P88=d01(站点定义为1号站)// P90=d00 P91=d00 P92=d02 P113=d01// (其他参数都是出厂默认值,可根据实际情况调节)//BEGINNetwork 1LD SM0.1CALL SBR0Network 2 // 正转启动命令LD M10.0EUMOVB 16#30, VB104 MOVB 16#36, VB105 MOVB 16#32, VB106 MOVB 16#30, VB107 MOVB 16#30, VB108 MOVB 16#30, VB109 MOVB 16#30, VB110 MOVB 16#30, VB111 MOVB 16#31, VB112 MOVB 16#32, VB113 CALL SBR1Network 3 // 反转启动指令LD M10.1EUMOVB 16#30, VB104 MOVB 16#36, VB105 MOVB 16#32, VB106 MOVB 16#30, VB107 MOVB 16#30, VB108 MOVB 16#30, VB109 MOVB 16#30, VB110 MOVB 16#30, VB111 MOVB 16#32, VB112 MOVB 16#32, VB113 CALL SBR1Network 4 // 停止指令LD M10.2EUMOVB 16#30, VB104MOVB 16#36, VB105MOVB 16#32, VB106MOVB 16#30, VB107MOVB 16#30, VB108MOVB 16#30, VB109MOVB 16#30, VB110MOVB 16#30, VB111MOVB 16#30, VB112MOVB 16#31, VB113CALL SBR1Network 5 // 1秒脉冲LDN T37TON T37, 10Network 6 // 加速指令(每1秒步进加速0.01Hz)LD M10.3A T37INCW VW135Network 7 // 减速指令(每1秒步进减速0.01Hz)LD M10.4A T37DECW VW135Network 8 // 上限频率50.00HzLDW>= VW135, 5000MOVW 5000, VW135Network 9 // 下限频率0.1HzLDW<= VW135, 10MOVW 10, VW135Network 10 // 凡有频率改变,调用子程序3 LDW<> VW135, VW145O SM0.1CALL SBR3Network 11 // 读取输出频率指令LD M10.5EUMOVB 16#30, VB104MOVB 16#33, VB105MOVB 16#32, VB106MOVB 16#31, VB107MOVB 16#30, VB108MOVB 16#33, VB109MOVB 16#30, VB110MOVB 16#30, VB111MOVB 16#30, VB112MOVB 16#31, VB113S M20.0, 1CALL SBR1Network 12 // 当读取频率时,执行频率显示运算子程序LD SM4.5A M20.1CALL SBR2Network 13 // SMB86=0表示正在接收,但本例是利用中断来接收LDB<> SMB86, 0MOVB SMB86, VB400Network 14 // 发送完成标志LD SM4.5= Q0.0END_ORGANIZATION_BLOCKSUBROUTINE_BLOCK SBR_0:SBR0TITLE=通信初始化参数子程序BEGINNetwork 1 // 初始化通信参数及定义开始符、终止符等接收信息LD SM0.0MOVB 16#69, SMB30MOVB 16#E0, SMB88MOVB 16#3A, SMB89MOVB 18, SMB94Network 2 // 初始化固定参数LD SM0.0MOVB 16#3A, VB101MOVB 16#30, VB102MOVB 16#31, VB103MOVB 16#0D, VB116MOVB 16#0A, VB117Network 3 // 声明使用发送完成中断LD SM0.0ATCH INT0, 9ENIEND_SUBROUTINE_BLOCKSUBROUTINE_BLOCK SBR_1:SBR1TITLE=计算校验及子程序BEGINNetwork 1 // 建立指针及参数清零等初始化LD SM0.0MOVD &VB101, VD131MOVW 0, VW129MOVW 6, VW127MOVW 0, AC0MOVW 0, AC1MOVW 0, AC2MOVW 0, AC3Network 2 // 循环计算原始累加和LD SM0.0FOR VW125, 1, VW127Network 3LD SM0.0LPSMOVW *VD131, AC0 ANDW 16#FF, AC0 AB> AC0, 16#39 MOVW AC0, AC1-I 16#37, AC1 LRDAB<= AC0, 16#39 MOVW AC0, AC1-I 16#30, AC1 LRDINCD VD131LRDMOVW *VD131, AC0 ANDW 16#FF, AC0 LRDAB> AC0, 16#39 MOVW AC0, AC2-I 16#37, AC2 LRDAB<= AC0, 16#30 MOVW AC0, AC2-I 16#30, AC2 LRDSLB AC1, 4LRDMOVW AC1, AC3+I AC2, AC3 LRD+I AC3, VW129 LPP+D 1, VD131 Network 4NEXTNetwork 5 // 指针加一,指向下一个LD SM0.0MOVW 0, AC2MOVW 0, AC3+D 1, VD131Network 6LD SM0.0LPSMOVW 16#FF, AC0ANDW VW129, AC0INVW AC0MOVW 1, VW800+I AC0, VW800MOVB VB801, AC2SRB AC2, 4AW> AC2, 9+I 16#37, AC2LRDMOVB AC2, *VD131LRD+D 1, VD131LRDMOVB VB801, AC3ANDB 16#0F, AC3LRDAW> AC3, 9+I 16#37, AC3LRDAW<= AC3, 9+I 16#30, AC3LPPMOVB AC3, *VD131Network 7 // 发送前,强行禁止接收LD SM0.0MOVB 16#70, SMB87RCV VB200, 0Network 8 // 开始发送LD SM0.0MOVB 17, VB100XMT VB100, 0FILL 0, VW200, 9Network 9 // 发送后允许接收LD SM0.0MOVB 16#F0, SMB87END_SUBROUTINE_BLOCKSUBROUTINE_BLOCK SBR_2:SBR2TITLE=频率显示运算子程序VARLIN1:DWORD;lLIN2:DWORD;LIN3:DWORD;LIN4:DWORD;END_VARBEGINNetwork 1 // 把接收到的16进制ASCII码信息,转换成习惯的小数点形式LD SM0.0BTI VB2008, LW0BTI VB2009, LW2BTI VB2010, LW4BTI VB2011, LW6Network 2LD SM0.0LPSAW> LW0, 16#40 MOVW LW0, AC0-I 16#37, AC0 LPPAW< LW0, 16#40 MOVW LW0, AC0-I 16#30, AC0 Network 3LD SM0.0LPSAW> LW2, 16#40 MOVW LW2, AC1-I 16#37, AC1 LPPAW< LW2, 16#40 MOVW LW2, AC1-I 16#30, AC1 Network 4LD SM0.0LPSAW> LW4, 16#40 MOVW LW4, AC2-I 16#37, AC2 LPPAW< LW4, 16#40 MOVW LW4, AC2-I 16#30, AC2 Network 5LD SM0.0LPSAW> LW6, 16#40 MOVW LW6, AC3-I 16#37, AC3 LPPAW< LW6, 16#40 MOVW LW6, AC3-I 16#30, AC3 Network 6LD SM0.0MOVB AC0, LB8SLB LB8, 4MOVB AC2, LB9SLB LB9, 4Network 7LD SM0.0MOVB LB8, VB3200 ORB AC1, VB3200 Network 8LD SM0.0MOVB LB9, VB3201 ORB AC3, VB3201 Network 9LD SM0.0ITD VW3200, VD3300 DTR VD3300, VD3304 MOVR VD3304, VD3308 /R 100.0, VD3308 Network 10LD SM0.0R M20.1, 1END_SUBROUTINE_BLOCKSUBROUTINE_BLOCK SBR_3:SBR3TITLE=输出频率通信格式整理子程序BEGINNetwork 1 // 凡是有输出频率,频率改变LD SM0.0MOVB 16#30, VB104MOVB 16#36, VB105MOVB 16#32, VB106MOVB 16#30, VB107MOVB 16#30, VB108MOVB 16#31, VB109MOVW VW135, VW137MOVW 0, AC0MOVW 0, AC1MOVW 0, AC2MOVW 0, AC3Network 2LD SM0.0LPSMOVB VB137, AC0ANDB 16#0F, AC0AW> AC0, 9+I 16#37, AC0LRDAW<= AC0, 9+I 16#30, AC0LRDITB AC0, VB111LRDMOVB VB138, AC1ANDB 16#0F, AC1LRDAW> AC1, 9+I 16#37, AC1 LRDAW<= AC1, 9+I 16#30, AC1 LPPITB AC1, VB113 Network 3LD SM0.0LPSMOVW VW137, VW139 SRW VW139, 4 MOVB VB139, AC2 ANDB 16#0F, AC2 AW> AC2, 9+I 16#37, AC2 LRDAW<= AC2, 9+I 16#30, AC2 LRDITB AC2, VB110 LRDMOVB VB140, AC3 ANDB 16#0F, AC3 LRDAW> AC3, 9+I 16#37, AC3 LRDAW<= AC3, 9+I 16#30, AC3 LRDITB AC3, VB112LRDMOVW VW135, VW145LPPCALL SBR1END_SUBROUTINE_BLOCKINTERRUPT_BLOCK INT_0:INT0TITLE=发送完成中断程序BEGINNetwork 1 // 除读取频率其他指令返回信息LD M20.0RCV VB200, 0Network 2 // 读取频率返回信息LD M20.0RCV VB2000, 0S M20.1, 1R M20.0, 1END_INTERRUPT_BLOCK。
台达总线通讯手册
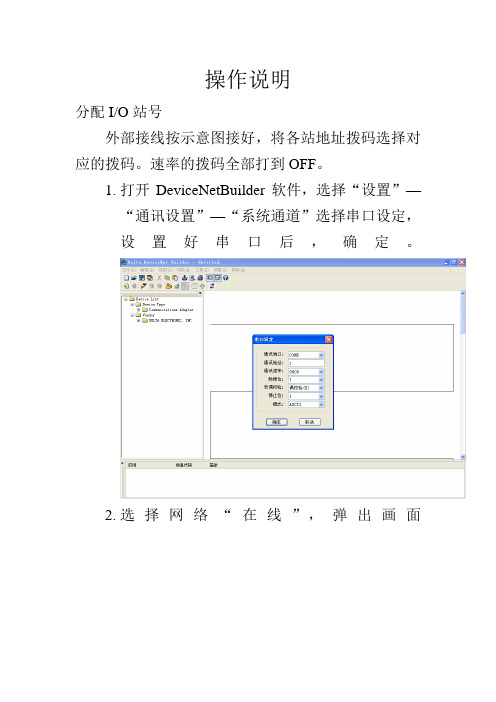
操作说明
分配I/O站号
外部接线按示意图接好,将各站地址拨码选择对应的拨码。
速率的拨码全部打到OFF。
1.打开DeviceNetBuilder软件,选择“设置”—
“通讯设置”—“系统通道”选择串口设定,
设置好串口后,确定。
2.选择网络“在线”,弹出画面
点击确定。
网络会出现所配置的模块。
如图
双击RTU-DNET,弹出节点配置
选择IO配置,弹出
点击扫描,出现报警对话框,点击“是”,系统完成后,点击下载。
3.另外三个站也按照同样的方法配置。
4.双击DNET Scanner,弹出
5.将可用节点中选项移动到扫描列表中
6 点击“确认”
7.点击标题栏中的“网络”选择“扫描模块设置”如
图
扩展波特选择。
选择所需要的波涛率。
如图
点击“确认”,然后选择标题栏点击“网络”选择“下载”,下载到plc中。
弹出的对话框点击“是”。
8. 下载完成后,右击RTU-DNET选择参数设置,弹
出
选择参数分组选择
下拉列表,如图
选择15项改为Enable,将16项改为所选择的波特率如图
点击“下载”然后“确定”。
9.另外各站依照此方法设置,下载。
10.给PLC整体断电。
将
DR1和DR2拨到“OFF”。
台达PLC Mobus通讯 软件说明

2. 寄存器操作时,“寄存器起始地址”,“寄存器个数”以及 8 个文本填写框,有对应规 则。例:寄存器起始地址=4098,寄存器个数=6,则 8 个文本填对应的装置地址为
4098
4099
4100
4101
4102
4103
不起作用
不起作用
3
三、软件使用说明
可切换,需要操 作的寄存器类型
博行控制技术
按照台达手册提 供的地址写入
最大 8
连接串 口
一旦连接 PLC 成 功 后,软件会 自动实时读 取 PLC 装置 的值
点击后会发生变化,再按“写入线圈”
只能填 32767 到 -32768
显示程序运行状态
注意: 1.软件的串口配置必须与 PLC 的串口配置一致。 在启动项中 ,会提供台达 PLC 程序,用于写入串口配置,仅供参考。
博行控制技术
台达 PLC-Modbus 通讯软件说明
一、硬件 此软件适用于如下台达系列 PLC:DVP-ES2/EX2/SS2/SA2/SX2/SE&TP 适用于 PC 和台达 PLC 进行 Modbus RTU 或 Modbus ASCII 的有线串口通讯。 下图为 2 中硬件连接简图:
RS485 PC
最多 32
个 PLC
PLC1
PLC2 图一
————
PLC3
RS232
PC
PLC
图二
1
二、软件安装
双击
博行控制技术
按照提示,等待 自动安装完毕
启动栏 生成手 册,桌 面生成 软件图 标
双击运 行程序
, 若双击
台达 说明书02-功能选择列简介

© 2001 DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
13
2. 功能选择列简介 PC<=>(PLC | HPP) Ö PC 与 PLC 或 PC 与 HPP 做通讯,可读取或写入程序。
方法一: 「通讯(C) 」菜单中「PC〈=〉(PLC∣HPP)」命令。 方法二:鼠标点选图标工具列上的 。 方法三:利用快速键,键盘输入复合键〔Ctrl〕+〔F1〕 。 程序验证 Ö 验证目前 PLC 内的程序是否和编辑中的程序相同。 方法: 」菜单中「程序验证」命令。 「通讯(C)
设定连接埠 Ö 使用 PC 之 RS232 埠(COM1、COM2、COM3 或 COM4)与 PLC 相连,使用何种埠取决于 PC 的状况。 方法: 」菜单中「设定连接埠」命令。 「设定(O)
设定传输速度 Ö 目前 PC 与 PLC 传输速度为 9600 位/秒(此传输速度为预留未来
可在阶梯图监控装置监控模式选择使用窗口比例更改窗口的显示比例有5075100125150175200及最适大小的窗口显示比例供选择
2. 功能选择列简介
、通讯 WPLSoft 刚激活时的第一个画面如下图,其功能选择列上会有五个选项:档案(F) (C) 、设定(O) 、窗口(W ) 、说明(H) 。
、 自「档案」选项开启档案后窗口如下图所示,其功能选择列上会有其它选项:编辑(E) 编译(P) 、批注(L) 、搜寻(S) 、检视(V) ,以下我们将依序介绍这些选项。
装置强制 ON/OFF Ö 强制将装置(Y、M、S、T、C)设定为 ON 或 OFF。(仅在阶梯图
14
© 2001 DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
台达全系列PLC说明书及应用手册[5]
![台达全系列PLC说明书及应用手册[5]](https://img.taocdn.com/s3/m/08cb1816e3bd960590c69ec3d5bbfd0a7956d533.png)
台达全系列PLC说明书及应用手册一、概述PLC(Programmable LogicController,可编程逻辑控制器)是一种专用于工业控制的电子设备,它可以根据用户编写的程序,对各种输入信号进行逻辑运算、计数、定时、数据操作等处理,并通过输出信号控制各种机械或者电气设备的运行。
高性能:台达PLC采用高速处理器和高效指令集,可实现快速响应和高精度控制。
高兼容性:台达PLC支持多种通讯协议和接口,可与各种外部设备和系统进行数据交换和集成。
高灵便性:台达PLC提供了丰富的扩展模块和配件,可根据用户的不同需求进行定制和组合。
二、安装与连接本节介绍了台达PLC的安装与连接方法,包括电源连接、输入输出连接、通讯连接等。
2.1 电源连接电源电压应符合PLC的额定值,不得超过或者低于规定范围。
电源线应按照正确的极性连接到PLC的电源端子上。
电源线应有足够的截面积和长度,以保证电流的稳定和降低线损。
电源线应避免与信号线或者其他干扰源并排走线,以防止噪声干扰。
2.2 输入输出连接输入输出设备的类型、规格、数量等应与PLC的输入输出端子相匹配。
输入输出线应按照正确的接线图连接到PLC的输入输出端子上。
输入输出线应有足够的截面积和长度,以保证信号的传输和质量。
输入输出线应避免与电源线或者其他干扰源并排走线,以防止噪声干扰。
2.3 通讯连接通讯设备的协议、波特率、地址等参数应与PLC的通讯端口设置一致。
通讯线应按照正确的接线图连接到PLC的通讯端口上。
通讯线应有足够的截面积和长度,以保证信号的传输和质量。
通讯线应避免与电源线或者其他干扰源并排走线,以防止噪声干扰。
三、编程与调试本节介绍了台达PLC的编程与调试方法,包括编程软件、编程语言、程序结构、程序、程序运行、程序监视等。
3.1 编程软件支持多种编程语言,包括梯形图、指令表、SFC等。
支持多种PLC型号,可自动识别或者手动选择PLC型号和版本。
支持多种通讯方式,包括RS-232、RS-485、以太网等,可实现与PLC的在线或者离线连接。
台达SV系列PLC之间的工业以太网通讯设置-李振
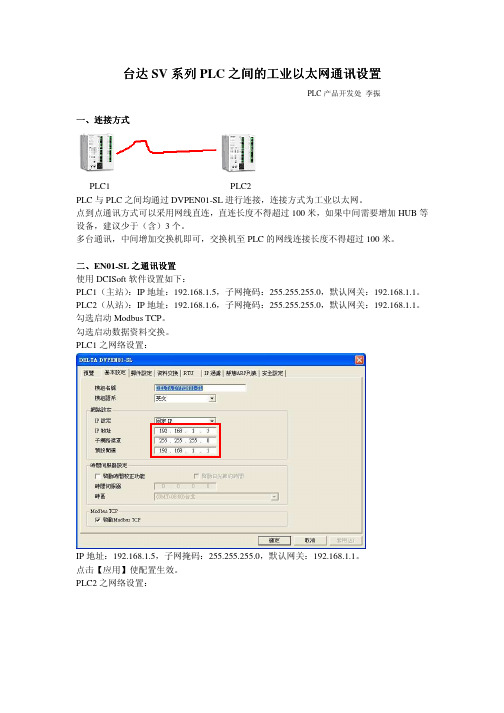
台达SV 系列PLC 之间的工业以太网通讯设置PLC 产品开发处 李振一、连接方式PLC1 PLC2PLC 与PLC 之间均通过DVPEN01-SL 进行连接,连接方式为工业以太网。
点到点通讯方式可以采用网线直连,直连长度不得超过100米,如果中间需要增加HUB 等设备,建议少于(含)3个。
多台通讯,中间增加交换机即可,交换机至PLC 的网线连接长度不得超过100米。
二、EN01-SL 之通讯之通讯设置设置使用DCISoft 软件设置如下: PLC1(主站):IP 地址:192.168.1.5,子网掩码:255.255.255.0,默认网关:192.168.1.1。
PLC2(从站):IP 地址:192.168.1.6,子网掩码:255.255.255.0,默认网关:192.168.1.1。
勾选启动Modbus TCP 。
勾选启动数据资料交换。
PLC1之网络设置:IP 地址:192.168.1.5,子网掩码:255.255.255.0,默认网关:192.168.1.1。
点击【应用】使配置生效。
PLC2之网络设置:IP地址:192.168.1.6,子网掩码:255.255.255.0,默认网关:192.168.1.1。
点击【应用】使配置生效。
两台PLC的IP地址必须同在一个网段内,且IP地址不可重复。
三、数据交换模式之一依靠EN01-SL的内部寄存器实现20个字的数据交换。
1、设置说明当CR82与CR85内设置值均为0时,此模式有效。
CR25以及C26设置IP地址,如CR25设置为H0106,CR26设置为HC0A8,则IP地址为192.168.1.6。
如果CR28设置不为0,则表示为从站站号,会自动搜寻该站号所对应之IP地址。
如果CR28设置为0,再设置CR25与CR26,则表示寻址方式为IP寻址。
将上图中的CR寄存器进行写入数据后(使用FROM/TO读取/写入),当CR13中每写入一次数据从K0变为K1,则启动一次通讯。
台达PLC和与台达VFD-M系列变频器通讯使用方法
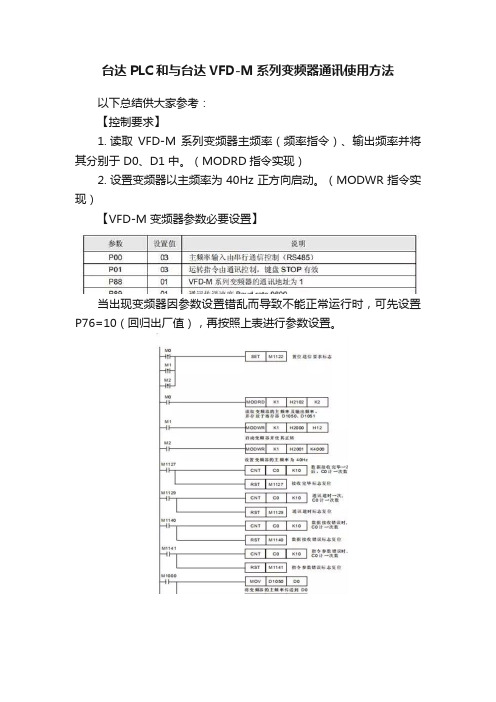
台达PLC和与台达VFD-M系列变频器通讯使用方法以下总结供大家参考:【控制要求】1.读取VFD-M 系列变频器主频率(频率指令)、输出频率并将其分别于 D0、D1 中。
(MODRD指令实现)2.设置变频器以主频率为 40Hz 正方向启动。
(MODWR 指令实现)【VFD-M 变频器参数必要设置】当出现变频器因参数设置错乱而导致不能正常运行时,可先设置P76=10(回归出厂值),再按照上表进行参数设置。
【元件说明】【控制程序】【程序说明】1.对 PLC RS-485 通讯口进行初始化,使其通讯格式为 MODBUS ASCII,9600,7,E,1。
变频器 RS485 通讯口通讯格式需与 PLC 通讯格式一致。
2.MODBUS 通讯只会出现4 种情况,正常通讯完成对应通讯标志M1127、通讯错误对应通讯标志:M1129、M1140、M1141,所以,在程序中通过对这4 个通讯标志信号的On/Off 状态进行计数,再利用 C0 的数值来控制 3 个 MODBUS 指令的依次执行,保证通讯的可靠性。
3.当 M0=On 时,[ MODRD K1 H2102 K2 ] 指令被执行,PLC 读取变频器的“主频率”和“输出频率”以ASCII 码字符形式存放在D1073~D1076,并自动将其内容转化成16 进制数值储存至D1050、D1051 中。
4.当 M1=On 时,[ MODWR K1 H2000 H12 ] 指令被执行,变频器启动并正方向运转。
5.当 M2=On 时,[ MODWR K1 H2001 K4000 ] 指令被执行,将变频器的主频率设置为40Hz。
6.程序的最后两行[ MOV D1050 D0 ] 是将变频器的主频率存储在 D0 中,[ MOV D1051 D1 ] 是把变频器的输出频率存储于 D1 中。
7.PLC 一开始 RUN,比较 C0=0,就一直反复地对变频器进行通讯的读写。
来源:网络。
QSK NET-DVP 台达系列 PLC 以太网通讯处理器 使用手册说明书

QSK NET-DVP 台达系列PLC以太网通讯处理器使用手册QSK NET-DVP 台达PLC以太网通讯处理器使用手册1.QSK NET-DVP应用1.1产品概述QSK NET-DVP是一款经济型的以太网通讯处理器,是为满足日益增多的工厂设备信息化需求(设备网络监控和生产管理)而设计,用于台达DVP-ES/ES2/EX2/EC3/EH3、DVP-SV2/SS2/SA/SX2、DVP-10PM/20PM等多个系列PLC的以太网数据采集,非常方便构建生产管理系统。
QSK NET-DVP采用模块化设计,不占用PLC编程口,即编程软件/上位机软件通过以太网对PLC数据监控的同时,触摸屏可以通过复用接口X2与PLC进行通讯。
1.2功能和应用领域1、安装在35mm的导轨上,COM1口直接连接至DVP的MD8编程通讯圆口,并扩展一个COM2口用于触摸屏通讯。
QSK NET-DVP可直接从PLC编程通讯口获取电源,也可外接24VDC电源。
2、集成WEB服务器,通过网页可设置设备参数和运行诊断,并设置登录保护密码,防止篡改配置数据。
3、自动匹配PLC和HMI串行参数,无需额外配置。
4、实现与台达编程软件WPLSoft、ISPSoft的以太网通讯,通过以太网进行程序的读出/写入(包括RUN中写入功能)/比对,可编程控制器运行监视等功能。
5、支持台达以太网协议通信,可以通过上位机系统对可编程控制器进行软元件数据的读出/写入,通过上位机软件(组态王、KepWare OPC服务器等)选择台达以太网驱动后,方便快捷访问。
6、集成ModbusTCP服务器,支持FC1、FC2、FC3、FC5、FC6、FC16,Modbus数据区对应台达DVP的软元件地址。
7、特定的TCP/IP协议直接映射到计算机串行端口,支持上位软件(编程软件FPWIN GR、组态王、MCGS、力控、IFIX、INTOUCH、KepWare OPC服务器等)方便快捷访问。
台达PLC与EM303A通讯实例说明
1、通讯实例通过 D1120 定义 MODBUS 通讯波特率为 9600,无校验,通讯逾时时间为
200ms。通讯指令每次数据接收完成后对存储器 D0 累加 1,循环执行 MODWR 和 MODRD 指
令(MODBUS 数据交换指令)。程序中 D0,M1,M2,M3,D100,D200,D202 为用户任意
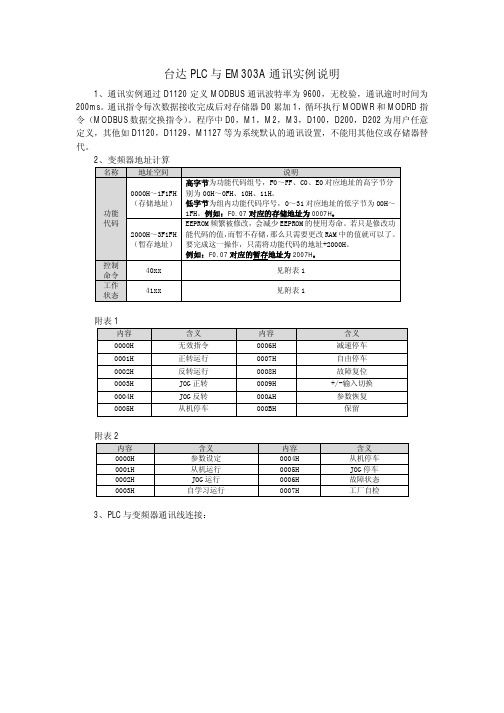
含义 减速停车 自由停车 故障复位 +/-输入切换 参数恢复
保留
附表 2
内容 0000H 0001H 0002H 0003H
含义 参数设定 从机运行 JOG 运行 自学习运行
3、PLC 与变频器通讯线连接:
内容 0004H 0005H 0006H 0007H
含义 从机停车 JOG 停车 故障状态 工厂自检
定义,其他如 D1120,D1129,M1127 等为系统默认的通讯设置,不能用其他位或存储器替
代。
2、变频器地址计算
名称 地址空间
说明
功能 代码
0000H~1F1FH (存储地址)
2000H~3F1FH (暂存地址)
高字节为功能代码组号,F0~FF、C0、E0 对应地址的高字节分 别为 00H~0FH、10H、11H。 低字节为组内功能代码序号,0~31 对应地址的低字节为 00H~ 1FH。例如:F0.07 对应的存储地址为 0007H。 EEPROM 频繁被修改,会减少 EEPROM 的使用寿命。若只是修改功 能代码的值,而暂不存储,那么只需要更改 RAM 中的值就可以了。 要完成这一操作,只需将功能代码的地址+2000H。
例如:F0.07 对应的暂存地址为 2007H。
控制 命令
40xx
FX3G对台达变频器通讯范例990108
台達變頻器參數設定部分:
02-00 設04、02-01 設03、09-01設2、09-04設4 09-01 是站號,出廠值是1,範例也是設1
安裝本範例前,請先清除PLC內程式記憶体,不要問為什麼,做就對了 此範例是FX3G-485-BD對台達變頻器ASCII通訊範例,不是RTU格式 範例編寫者:上菱機電股份有限公司 JECCOFENG 990108 筆
檢查項目 加總
ADD
R92
R97
R92
檢查項目 資料前2位 檢查項目 加總 加總
ADD
R92
R98
R92
檢查項目 資料後2位 檢查項目 加總 加總
SUB
K256
R92
檢查項目 加總
R91 LRC計算值
ASCI
R91 R13 K2 LRC計算值LRC檢查碼 前2位
SET
M8122
通訊傳送 命令
M8122 196 SET S22
MOV
D200
K4M80
設定頻率 編碼
MOV
K2M88
R97
資料前2位
MOV
K2M80
R98
資料後2位
M7017
321
SRET
P2 322
M8000 MOV H6 R94
變頻控制 命令
命令
MOV
H20
R95
控制項目 前2位
MOV
H0
R96
控制項目 後2位
MOV
K2M108
R97
資料前2位
MOV
K2M100
通訊傳送 命令
傳送通訊 命令
199
STL
S22
傳送通訊 命令
M8123 200 SET S23
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
精心整理
台达通讯示范程序及说明一、本试验主要完成以下功能:
1)通过RS指令完成在HMI上读写DTA温度控制器、ASDA台达伺服控制器任意地址数据;2)通过人机HMI/PC实现伺服电机Pr模式下回原点、任意位置选择与定位控制。
二、试验用硬件和软件列表
序号名称型号数量
1 台达温度控制器DTA9696R1 1
2 台达伺服单元ASD-A0420LA 1
3 台达PLC DVP12SA11T 1
4 人机界面HMI PWS6600S-S 1
5 24V电源** 1
5 通讯线** 若干
调试过程中使用的软件:
1).HITECH-ADP 6.1.1.03画面编程软件
2).DeltaservoUIsoftwareA1.003伺服调试工具
3).台达PLC编程软件WPLSoft-2.09
三、资料引用描述:
1).ADP软件使用说明.pdf
2).ASD-A系列伺服驱动器系列手册.pdf
M1000~M1014:参见P2-61~P2-63
BMOV:全部传送参见P6-24
RS:数据传输参见P7-81
ASCI:HEX转为ASCII参见P7-97
HEX:ASCII转为HEX参见P7-102
CCD:校验码参见P7-105
3)台达温度控制器DTA系列操作手册
四.程序中的关键部分编写思路
1)“二补码”的计算:
一个8位十六进制数(如**H)的二补码的计算方法是:FFH-**H+01H=100H-**H
2)编程的时候请参考章节(RS:数据传输参见P7-81)ASCII表
3)下面我们以写数据为例来说明编程思路
如下图所示,在PLC启动正向RUN的瞬间,写入初始化数值(图中左列所示);由
人机界面输入16进制数地址(如4700H),通过ASCI指令将其每一位转化为ASCII码存放到D60(D80)开始的4个数据寄存器中,然后通过BMOV指令送到D105…D108(D109…D112)中。
数据传入以后,从地址ADR1/0开始,两个一组依次相加计算校验
码(见程序说明)。
在一个PLC扫描周期,需要将数据写入指定的地址当中去,以免产生错误,但是在人机
界面上,在同一时间只能写入一个数据,为解决这个矛盾,我们采用先把数据写入PLC 的数据寄存器中,待地址和数据都写好以后,人为地给一个触发信号,将数据同时写入。
补码计算子程序:
时间的处理方法:分时处理——在不同时间段进行不同的读写操作。
如:
时间段M0----温度控制器写操作。