弹塑性力学考试简答题以及答案
同济大学弹塑性力学试题和习题解答

弹塑性力学试卷及习题解答弹塑性力学试卷配套教材《弹性与塑性力学》陈惠发1.是非题(认为该题正确,在括号中打√;该题错误,在括号中打×。
)(每小题2分)(1)物体内某点应变为0值,则该点的位移也必为0值。
( ) (2)可用矩阵描述的物理量,均可采用张量形式表述。
( ) (3)因张量的分量是随坐标系的变化而变化,故张量本身也应随坐标系变化。
( ) (4)弹性的应力和应变张量两者的主方向是一致性,与材料无关的。
()(5)对于常体力平面问题,若应力函数()y x ,ϕ满足双调和方程022=∇∇ϕ,那么, 由()y x ,ϕ确定的应力分量必然满足平衡微分方程。
() (6)若某材料在弹性阶段呈各向同性,故其弹塑性状态势必也呈各向同性。
( ) (7)Drucker 假设适合于任何性质的材料。
( ) (8)应变协调方程的几何意义是:物体在变形前是连续的,变形后也是连续的。
( ) (9)对于任何材料,塑性应变增量均沿着当前加载面的法线方向。
( ) (10)塑性应变增量的主方向与应力增量的主方向不重合。
P107;226 ( )2.填空题(在每题的横线上填写必要的词语,以使该题句意完整。
)(每小题2分)(1)设()4322241,y a y x a x a y x ++=ϕ,当321,,a a a 满足_______________________关系时()y x ,ϕ能作为应力函数。
(2)弹塑性力学是研究固体受外界因素作用而产生的______________________的一门学科。
(3)导致后继屈曲面出现平移及扩大的主要原因是材料______________________。
(4)π平面上的一点对应于应力的失量的______________________。
P65 (5)随动强化后继屈服面的主要特征为:___________________________________________。
弹塑性力学习题解答
第一、二章作业一、选择题:1.弹性力学的研究对象是 B 。
A.刚体;B.可变形固体;C.一维构件; D.连续介质;2.弹性力学的研究对象是 C几何尺寸和形状。
A.受到…限制的物体; B.可能受到…限制的物体;C.不受…限制的物体; D.只能是…受限制的任何连续介质;3.判断一个张量的阶数是根据该张量的C确定的。
A.下标的数量; B.哑标的数量; C.自由标的数量; D.字母的数量。
4.展开一个张量时,对于自由下标操作的原则是按其变程C。
A.一一罗列; B.先罗列再求和; C.只罗列不求和; D.一一求和。
5.展开一个张量时,对于哑脚标操作的原则是按其变程B。
A.一一罗列; B.先罗列再求和; C.只罗列不求和; D.一一求和。
6.在弹性力学中,对于固体材料(即研究对象)物性组成的均匀性以及结构上的连续性等问题,提出了基本假设。
这些基本假设中最基本的一条是 A。
A.连续性假设; B.均匀性假设;C.各向同性的假设; D.几何假设——小变形条件;7.从一点应力状态的概念上讲,当我们谈及应力,必须表明的是D。
A.该应力的大小和指向,是正应力还是剪应力;B.该应力是哪一点处的正应力和剪应力,还是全应力;C.该应力是哪一点处的应力D.该应力是哪一点处哪一微截面上的应力,是正应力还是剪应力。
8.表征受力物体内一点处的应力状态一般需要__B_应力分量,其中独立的应力分量有_C__。
A. 18个; B. 9个; C. 6个; D. 2个。
9.一点应力状态的主应力作用截面上,剪应力的大小必定等于___D_________。
A.主应力值; B.极大值; C.极小值; D.零。
10.一点应力状态的最大(最小)剪应力作用截面上的正应力,其大小_____D_______。
A.一般不等于零; B.等于极大值; C.等于极小值; D.必定等于零。
11.平衡微分方程是 C 间的关系。
A .体力分量和面力分量;B .应力分量和面力分量;C .体力分量和应力分量;D .体力分量、面力分量和应力分量;12.静力边界条件是 B 间的关系。
塑性力学考试题及答案

塑性力学考试题及答案一、选择题(每题2分,共20分)1. 塑性变形与弹性变形的主要区别是()。
A. 塑性变形是可逆的B. 弹性变形是可逆的C. 塑性变形是不可逆的D. 弹性变形是不可逆的2. 材料在塑性变形过程中,其应力-应变曲线上的哪一点标志着材料的屈服点?A. 最大应力点B. 最大应变点C. 应力-应变曲线上的转折点D. 应力-应变曲线的起始点3. 下列哪项不是塑性变形的特征?A. 材料形状的改变B. 材料体积的不变C. 材料内部结构的不可逆变化D. 材料的弹性恢复4. 塑性变形的三个基本假设中,不包括以下哪一项?A. 材料是连续的B. 材料是各向同性的C. 材料是不可压缩的D. 材料是完全弹性的5. 塑性变形的流动法则通常采用哪种形式来描述?A. 线性形式B. 非线性形式C. 指数形式D. 对数形式二、简答题(每题10分,共30分)6. 简述塑性变形的三个基本假设及其物理意义。
7. 解释什么是塑性屈服准则,并举例说明常用的屈服准则。
8. 描述塑性变形过程中的加载和卸载路径,并解释它们的区别。
三、计算题(每题25分,共50分)9. 给定一个材料的应力-应变曲线,如果材料在达到屈服点后继续加载,求出在某一特定应变下的材料应力。
10. 假设一个材料在单轴拉伸条件下发生塑性变形,已知材料的屈服应力和弹性模量,求出在塑性变形阶段的应变率。
答案一、选择题1. 答案:C2. 答案:C3. 答案:D4. 答案:D5. 答案:B二、简答题6. 塑性变形的三个基本假设包括:- 材料是连续的:假设材料没有空隙和裂缝,是连续的均匀介质。
- 材料是各向同性的:假设材料在所有方向上具有相同的物理性质。
- 材料是不可压缩的:假设在塑性变形过程中材料的体积保持不变。
7. 塑性屈服准则是判断材料是否开始发生塑性变形的条件。
常用的屈服准则包括:- Von Mises准则:适用于各向同性材料,当材料的等效应力达到某一临界值时,材料开始发生塑性变形。
同济大学弹塑性力学试卷及习题解答.
弹塑性力学试卷及习题解答弹塑性力学试卷配套教材《弹性与塑性力学》陈惠发1.是非题(认为该题正确,在括号中打√;该题错误,在括号中打×。
)(每小题 2 分)(1)物体内某点应变为0 值,则该点的位移也必为0 值。
(2)可用矩阵描述的物理量,均可采用张量形式表述。
3)因张量的分量是随坐标系的变化而变化,故张量本身也应随坐标系变化。
()4)弹性的应力和应变张量两者的主方向是一致性,与材料无关的。
()5)对于常体力平面问题,若应力函数x,y 满足双调和方程 2 20,那么,由x,y 确定的应力分量必然满足平衡微分方程。
()(6)若某材料在弹性阶段呈各向同性,故其弹塑性状态势必也呈各向同性。
()(7)Drucker 假设适合于任何性质的材料。
()(8)应变协调方程的几何意义是:物体在变形前是连续的,变形后也是连续的。
()(9)对于任何材料,塑性应变增量均沿着当前加载面的法线方向。
()(10)塑性应变增量的主方向与应力增量的主方向不重合。
P107;226 ()2.填空题(在每题的横线上填写必要的词语,以使该题句意完整。
)(每小题 2 分)(1)设x,y a1x a2x y a3y ,当a1,a2,a3满足_________________________________ 关系时x,y 能作为应力函数。
(2)弹塑性力学是研究固体受外界因素作用而产生的______________________ 的一门学科。
(3)导致后继屈曲面出现平移及扩大的主要原因是材料_______________________ 。
(4)π 平面上的一点对应于应力的失量的 _____________________ 。
P65(5)随动强化后继屈服面的主要特征为:__________________________________________ 。
(6)主应力轴和主应变轴总是重合的材料为_______________________ 。
(完整word版)武汉大学弹塑性力学简答题以及答案

弹塑性力学简答题2002年1 什么是偏应力状态?什么是静水压力状态?举例说明?P24静水压力状态时指微六面体的每个面只有正应力作用,应力大小均为平均应力。
偏应力状态是从应力状态中扣除静水压力后剩下的部分。
2 从数学和物理的不同角度,阐述相容方程的意义。
P48从数学角度看,由于几何方程是6个,而待求的位移分量是3个,方程数目多于未知函数的数目,求解出的位移不单值。
从物理角度看,物体各点可以想象成微小六面体,微单元体之间就会出现“裂缝”或者相互“嵌入",即产生不连续。
3 两个材料不同、但几何形状、边界条件及体积力(且体积力为常数)等都完全相同的线弹性平面问题,它们的应力分布是否相同?为什么?相同。
应力分布受到平衡方程、变形协调方程及力边界条件,未涉及本构方程,与材料性质无关。
4 虚位移原理等价于哪两组方程?推导原理时是否涉及到物理方程?该原理是否适用于塑性力学问题?P156平衡微分方程和静力边界条件。
不涉及物理本构方程。
适用于塑性力学问题。
5 应力状态是否可以位于加载面外?为什么?P239当应力状态从加载面上向加载面外变化时,将产生新的塑性变形,引起内变量增加,这时,加载面会随之改变,使得更新的应力状态处在更新的加载面上.6 什么是加载?什么是卸载?什么是中性变载?中性变载是否会产生塑性变形?P250加载:随着应力的增加,应变不断增加,材料在产生弹性变形的同时,还会产生新的塑性变形,这个过程称之为加载。
卸载:当减少应力时,应力与应变将不会沿着原来的路径返回,而是沿接近于直线的路径回到零应力,弹性变形被恢复,塑性变形保留,这个过程称之为卸载。
中性变载:应力增量沿着加载面,即与加载面相切.应力在同一个加载面上变化,内变量将保持不变,不会产生新的塑性变形,但因为应力改变,会产生弹性应变。
7 用应力作为未知数求解弹性力学问题时,应力除应满足平衡方程外还需要满足哪些方程?P93协调方程和边界条件。
8 薄板弯曲中,哪些应力和应变分量较大?哪些应力和应变分量较小?P121平面内应力分量(x y xy σστ、、)最大,最主要的是应力,横向剪应力(z y xz ττ、)较小,是次要的应力;z 方向的挤压应力z σ最小,是更次要的应力。
弹塑力学综合测试题

综合测试试题一一、问答题:(简要回答,必要时可配合图件答题。
每小题5分,共10分。
)1、简述固体材料弹性变形的主要特点。
请参见教材第49页。
2、试列出弹塑性力学中的理想弹塑性力学模型(又称弹性完全塑性模型)的应力与应变表达式,并绘出应力应变曲线。
二、填空题:(每空2分,共8分)1、在表征确定一点应力状态时,只需该点应力状态的___个独立的应力分量,它们分别是__。
(参照oxyz直角坐标系)。
2、在弹塑性力学应力理论中,联系应力分量与体力分量间关系的表达式叫___方程,它的缩写式为___。
三、选择题(每小题有四个答案,请选择一个正确的结果。
每小题4分,共16分。
)1、试根据由脆性材料制成的封闭圆柱形薄壁容器,受均匀内压作用,当压力过大时,容器出现破裂。
裂纹展布的方向是:_________。
A、沿圆柱纵向(轴向)B、沿圆柱横向(环向)C、与纵向呈45°角D、与纵向呈30°角2、金属薄板受单轴向拉伸,板中有一穿透形小圆孔。
该板危险点的最大拉应力是无孔板最大拉应力__________倍。
A、2B、3C、4D、53、若物体中某一点之位移u、v、w均为零(u、v、w分别为物体内一点,沿x、y、z直角坐标系三轴线方向上的位移分量。
)则在该点处的应变_________。
A、一定不为零B、一定为零C、可能为零D、不能确定4、以下________表示一个二阶张量。
A、B、C、D、四、试根据下标记号法和求和约定展开下列各式:(共8分)1、;(i ,j = 1,2,3 );2、;五、计算题(共计64分。
)1、试说明下列应变状态是否可能存在:;()上式中c为已知常数,且。
2、已知一受力物体中某点的应力状态为:式中a为已知常数,且a>0,试将该应力张量分解为球应力张量与偏应力张量之和。
为平均应力。
并说明这样分解的物理意义。
3、一很长的(沿z轴方向)直角六面体,上表面受均布压q作用,放置在绝对刚性和光滑的基础上,如图所示。
弹塑性力学简答题
弹塑性力学简答题1、给定单值连续的位移函数,通过几何方程可求出应变分量,问这些应变分量是否满足变形协调方程?为什么?2、对于各向同性弹性材料,应用广义胡克定律说明应力主轴与应变主轴重合。
3、泊松比是否可以大于0.5?大于0.5会导致什么结果?4、弹性力学平面问题中物体内的应力分布是否与其弹性常数有关?试根据问题求解的基本方程和边界条件加以说明。
5、虚位移原理等价于哪两个方程?它在塑性力学中能否成立,为什么?6、什么是正交流动法则?他是在什么假定下导出的?7、什么是硬化?什么是等向硬化?8、对于理想弹塑性体,试说明极限状态和极限荷载的概念。
9、全量(变形)理论在什么情况下与增量(流动)理论一致。
10、一混凝土矩形薄板,长边方向为y,短边方向为x,受均布荷载,试问哪个方向的配筋量应该大些?为什么?11、偏应力第二不变量的物理意义是什么?12、什么是比例加载?什么是比例变形?13、求解弹塑性力学问题的应力法能应用于求解其中的位移边界条件问题吗?为什么?14、物体在一定的外力作用下,位于稳定平衡状态,试想它的每一点都产生微小的位移,在这个微小位移上外力所做功和内力所做功哪个大?为什么?15、说明为什么弹性模量必须大于零。
16、什么是超弹性材料?超弹性材料的特点是什么?它的应力、应变和应变能之间的关系如何?17、什么是Mises应力?为什么要这样定义?18、理想弹塑性体内塑性区的变形是否总是协调的吗?为什么?19、对于各向同性超弹性体,其应变能是应力的三个不变量的函数,据此说明在线性弹性情况下独立的弹性常数只有两个。
20、与Ritz法相比,有限元方法的优点主要有哪些?21、物体稳定的充分条件如何用应力增量和应变增量表示?并说明对于线弹性体该条件室恒满足的。
22、用简单的位错模型说明为什么金属材料的屈服条件可以假定与静水压力无关。
23、理想塑性材料本构的塑形因子是通过什么来确定的?24、以Mises材料为例,试说明如何根据试验确定加载面的演化方程。
弹塑性力学试题答案完整版
欧拉描述便于对固定空间区域特别是包含流动、大变形和物质混合问题的建模。 5)转动张量:表示刚体位移部分,即
0
Wij
=
1
2
v x
−
u y
1 2
w x
−
u z
1 2
u y
−
v x
0
1 2
w y
−
v z
1 2
u z
−
w x
1 2
v z
−
w y
0
6)应变张量:表示纯变形部分,即
22)小应变张量:(P33) 23)弹性模量:E 的数值随材料而异,是通过实验测定的,其值表征材料抵抗弹性变形的能力,其量纲
为 ML-1T-2 ,其单位为 Pa。
E 是度量物体受力时形变大小的物理量。指在弹性限度内,应力与应变的比值。 弹性模量又分纵向弹性模量(杨氏模量)和剪切弹性模量。杨氏模量为正应力与线应变之比值;剪切弹 性模量为剪应力与剪应变之比值。对同一种材料,在弹性极限内,弹性模量是一常数。 24)相容方程(P38): 25)变分原理:
弹塑性力学 2008、2009 级试题
一、简述题 1)弹性与塑性
弹性:物体在引起形变的外力被除去以后能恢复原形的这一性质。 塑性:物体在引起形变的外力被除去以后有部分变形不能恢复残留下来的这一性质。 2)应力和应力状态 应力:受力物体某一截面上一点处的内力集度。
应力状态:某点处的 9 个应力分量组成的新的二阶张量 。
( ) ( ) 个独立的应力分量的函数,即为 f = 0 , f ij 即为屈服函数。
10)不可压缩:对金属材料而言,在塑性状态,物体体积变形为零。
11)稳定性假设(P56):即德鲁克公社,包括:1.在加载过程中,应力增量所做的功 dWD 恒为正;2.在
(完整版)弹塑性力学习题题库加答案
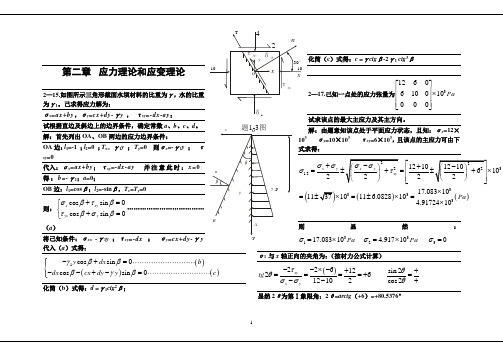
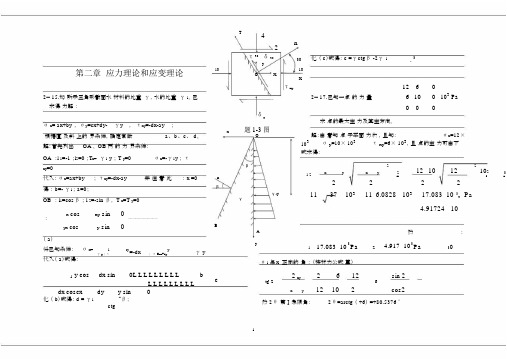
第二章 应力理论和应变理论2—15.如图所示三角形截面水坝材料的比重为γ,水的比重为γ1。
己求得应力解为:σx =ax+by ,σy =cx+dy-γy , τxy =-dx-ay ;试根据直边及斜边上的边界条件,确定常数a 、b 、c 、d 。
解:首先列出OA 、OB 两边的应力边界条件:OA 边:l 1=-1 ;l 2=0 ;T x = γ1y ; T y =0 则σx =-γ1y ; τxy =0代入:σx =ax+by ;τxy =-dx-ay 并注意此时:x =0 得:b=-γ1;a =0;OB 边:l 1=cos β;l 2=-sin β,T x =T y =0则:cos sin 0cos sin 0x xy yxy σβτβτβσβ+=⎧⎨+=⎩………………………………(a )将己知条件:σx= -γ1y ;τxy =-dx ; σy =cx+dy-γy 代入(a )式得:()()()1cos sin 0cos sin 0y dx b dx cx dy y c γβββγβ-+=⎧⎪⎨--+-=⎪⎩化简(b )式得:d =γ1ctg 2β;化简(c )式得:c =γctg β-2γ1 ctg 3β2—17.己知一点处的应力张量为31260610010000Pa ⎡⎤⎢⎥⨯⎢⎥⎢⎥⎣⎦试求该点的最大主应力及其主方向。
解:由题意知该点处于平面应力状态,且知:σx =12×103 σy =10×103 τxy =6×103,且该点的主应力可由下式求得:(()()31.233331210102217.0831******* 6.082810 4.9172410x yPa σσσ⎡++⎢=±=⨯⎢⎣⨯=⨯=±⨯=⨯则显然:3312317.08310 4.917100Pa Pa σσσ=⨯=⨯=σ1 与x 轴正向的夹角为:(按材力公式计算)()22612sin 22612102cos 2xyx ytg τθθσσθ--⨯-++====+=--+显然2θ为第Ⅰ象限角:2θ=arctg (+6)=+80.5376°题图1-3则:θ=+40.268840°16' 或(-139°44')2—19.己知应力分量为:σx =σy =σz =τxy =0,τzy =a ,τzx =b ,试计算出主应力σ1、σ2、σ3并求出σ2的主方向。
弹塑性力学讲义简答题
研究生弹塑性考试试题1. 简答题:(每小题2分)(1) 弹性本构关系和塑性本构关系的各自主要特点是什么?(2) 偏应力第二不变量J 2的物理意义是什么?(3) 虚位移原理是否适用于塑性力学问题?为什么?(4) 塑性内变量是否可以减小?为什么?(5) Tresca 屈服条件和Mises 屈服条件是否适用于岩土材料?为什么?(6) 解释:在应力空间中为什么应力状态不能位于加载面之外?(7) π平面上的点所代表的应力状态有何特点?(8) 举例说明屈服条件为各向同性的物理含义?2. 岩土材料若服从Drucker-Prager 屈服条件,试使用关联流动法则求塑性体积应变增量的表达式?(8分)3. 试确定下面的平面应变状态是否存在?(6分)εx =Axy 2,εy =Bx 2y ,γxy =0,A 、B 为常数4. 正方形薄板三边固定,另一边承受法向压力b x p p π-=sin0,如图所示,设位移函数为 0=u by b x a v 2sin sin 2ππ= 利用Ritz 法求位移近似解(泊松比ν=0)。
(15分)y xabA BC O(第4题图) (第5题图)5. 如图所示的矩形薄板OABC ,OA 边与BC 边为简支边,OC 边与AB 边为自由边。
板不受横向荷载,但在两个简支边上受大小相等而方向相反的均布弯矩M 。
试证,为了将薄板弯成柱面,即w =f (x ),必须在自由边上施加以均布弯矩νM 。
并求挠度和反力。
(15分)6. 如图所示矩形截面梁受三角形分布荷载作用,试检验应力函数ϕ=Ax 3y 3+Bxy 5+Cx 3y +Dxy 3+Ex 3+Fxy能否成立。
若能成立求出应力分量。
(15分)(第6题图)7.8. 一材料质点处在平面应变状态下(εz =0),若假定材料的弹性变形相对其塑性变形较小可忽略,应力应变关系服从Levy-Mises 增量理论,即d εij =d λs ij ,且材料体积是不可压缩的,试证明σz =21(σx +σy ) 进一步证明在此情况下,Tresca 屈服条件和Mises 屈服条件重合。
塑性力学测试题及答案
塑性力学测试题及答案一、单项选择题(每题2分,共10分)1. 塑性力学中,材料的屈服强度是指材料在受到何种应力条件下开始产生塑性变形的应力值?A. 单轴拉伸应力B. 单轴压缩应力C. 多轴应力D. 任何应力条件下答案:A2. 塑性变形与弹性变形的主要区别是什么?A. 塑性变形是可逆的,弹性变形是不可逆的B. 塑性变形是不可逆的,弹性变形是可逆的C. 塑性变形和弹性变形都是可逆的D. 塑性变形和弹性变形都是不可逆的答案:B3. 根据塑性力学理论,下列哪种材料可以被视为理想塑性材料?A. 脆性材料B. 弹性材料C. 塑性材料D. 粘弹性材料答案:C4. 在塑性力学中, Tresca 屈服准则与 Von Mises 屈服准则的主要区别是什么?A. Tresca 屈服准则基于最大剪应力,Von Mises 屈服准则基于最大正应力B. Tresca 屈服准则基于最大正应力,Von Mises 屈服准则基于最大剪应力C. Tresca 屈服准则和 Von Mises 屈服准则都基于最大剪应力D. Tresca 屈服准则和 Von Mises 屈服准则都基于最大正应力答案:C5. 塑性力学中,材料的硬化指数 n 表示什么?A. 材料的弹性模量B. 材料的屈服强度C. 材料的塑性变形能力D. 材料的断裂韧性答案:C二、填空题(每题2分,共10分)1. 塑性力学中,材料的______是指材料在受到应力作用下,从弹性状态转变为塑性状态的应力值。
答案:屈服强度2. 塑性变形与弹性变形的主要区别在于塑性变形是______的。
答案:不可逆3. 在塑性力学中,理想塑性材料是指在达到屈服点后,材料的应力______保持不变。
答案:不再增加4. Tresca 屈服准则认为,当材料的______达到一定值时,材料开始屈服。
答案:最大剪应力5. 塑性力学中,材料的硬化指数 n 越大,表示材料的______能力越强。
答案:塑性变形三、简答题(每题10分,共20分)1. 简述塑性力学中,塑性变形与弹性变形的主要区别。
同济大学弹塑性力学试卷及习题解答
弹塑性力学试卷及习题解答弹塑性力学试卷配套教材《弹性与塑性力学》陈惠发1.是非题(认为该题正确,在括号中打√;该题错误,在括号中打×。
)(每小题2分)(1)物体内某点应变为0值,则该点的位移也必为0值。
() (2)可用矩阵描述的物理量,均可采用张量形式表述。
( ) (3)因张量的分量是随坐标系的变化而变化,故张量本身也应随坐标系变化。
( ) (4)弹性的应力和应变张量两者的主方向是一致性,与材料无关的。
()(5)对于常体力平面问题,若应力函数()y x ,ϕ满足双调和方程022=∇∇ϕ,那么, 由()y x ,ϕ确定的应力分量必然满足平衡微分方程。
() (6)若某材料在弹性阶段呈各向同性,故其弹塑性状态势必也呈各向同性。
( ) (7)Drucker 假设适合于任何性质的材料。
( ) (8)应变协调方程的几何意义是:物体在变形前是连续的,变形后也是连续的。
( ) (9)对于任何材料,塑性应变增量均沿着当前加载面的法线方向。
( ) (10)塑性应变增量的主方向与应力增量的主方向不重合。
P107;226 ( )2.填空题(在每题的横线上填写必要的词语,以使该题句意完整。
)(每小题2分)(1)设()4322241,y a y x a x a y x ++=ϕ,当321,,a a a 满足_______________________关系时()y x ,ϕ能作为应力函数。
(2)弹塑性力学是研究固体受外界因素作用而产生的______________________的一门学科。
(3)导致后继屈曲面出现平移及扩大的主要原因是材料______________________。
(4)π平面上的一点对应于应力的失量的______________________。
P65 (5)随动强化后继屈服面的主要特征为:___________________________________________。
(完整版)弹塑性力学习题题库加答案
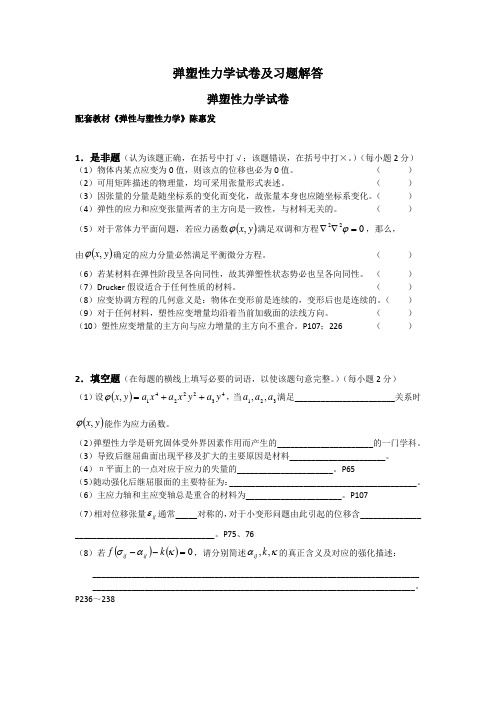
第二章 应力理论和应变理论2—15.如图所示三角形截面水坝材料的比重为γ,水的比重为γ1。
己求得应力解为:σx =ax+by ,σy =cx+dy-γy , τxy =-dx-ay ;试根据直边及斜边上的边界条件,确定常数a 、b 、c 、d 。
解:首先列出OA 、OB 两边的应力边界条件:OA 边:l 1=-1 ;l 2=0 ;T x = γ1y ; T y =0 则σx =-γ1y ; τxy =0代入:σx =ax+by ;τxy =-dx-ay 并注意此时:x =0 得:b=-γ1;a =0;OB 边:l 1=cos β;l 2=-sin β,T x =T y =0则:cos sin 0cos sin 0x xy yxy σβτβτβσβ+=⎧⎨+=⎩………………………………(a )将己知条件:σx= -γ1y ;τxy =-dx ; σy =cx+dy-γy 代入(a )式得:()()()1cos sin 0cos sin 0y dx b dx cx dy y c γβββγβ-+=⎧⎪⎨--+-=⎪⎩化简(b )式得:d =γ1ctg 2β;化简(c )式得:c =γctg β-2γ1 ctg 3β2—17.己知一点处的应力张量为31260610010000Pa ⎡⎤⎢⎥⨯⎢⎥⎢⎥⎣⎦试求该点的最大主应力及其主方向。
解:由题意知该点处于平面应力状态,且知:σx =12×103 σy =10×103 τxy =6×103,且该点的主应力可由下式求得:(()()31.233331210102217.0831******* 6.082810 4.9172410x yPa σσσ⎡++⎢=±=⨯⎢⎣⨯=⨯=±⨯=⨯则显然:3312317.08310 4.917100Pa Pa σσσ=⨯=⨯=σ1 与x 轴正向的夹角为:(按材力公式计算)()22612sin 22612102cos 2xyx ytg τθθσσθ--⨯-++====+=--+显然2θ为第Ⅰ象限角:2θ=arctg (+6)=+80.5376°题图1-3则:θ=+40.268840°16' 或(-139°44')2—19.己知应力分量为:σx =σy =σz =τxy =0,τzy =a ,τzx =b ,试计算出主应力σ1、σ2、σ3并求出σ2的主方向。
工程弹塑性力学题库及答案

⼯程弹塑性⼒学题库及答案第⼀章弹塑性⼒学基础1.1什么是偏应⼒状态?什么是静⽔压⼒状态?举例说明?解:静⽔压⼒状态时指微六⾯体的每个⾯只有正应⼒作⽤,偏应⼒状态是从应⼒状态中扣除静⽔压⼒后剩下的部分。
1.2对照应⼒张量与偏应⼒张量,试问:两者之间的关系?两者主⽅向之间的关系?解:两者主⽅向相同。
1.3 简述应⼒和应变Lode参数定义及物理意义:解:µσ的定义、物理意义:;1) 表征S ij的形式;2) µσ相等,应⼒莫尔圆相似,S ij形式相同;3) 由µσ可确定S1:S2:S3。
1.4设某点应⼒张量的分量值已知,求作⽤在过此点平⾯上的应⼒⽮量,并求该应⼒⽮量的法向分量。
解:该平⾯的法线⽅向的⽅向余弦为⽽应⼒⽮量的三个分量满⾜关系⽽法向分量满⾜关系最后结果为:1.5利⽤上题结果求应⼒分量为时,过平⾯处的应⼒⽮量,及该⽮量的法向分量及切向分量。
解:求出后,可求出及,再利⽤关系可求得。
最终的结果为,1.6 已知应⼒分量为,其特征⽅程为三次多项式,求。
如设法作变换,把该⽅程变为形式,求以及与的关系。
解:求主⽅向的应⼒特征⽅程为式中:是三个应⼒不变量,并有公式代⼊已知量得为了使⽅程变为形式,可令代⼊,正好项被抵消,并可得关系代⼊数据得,,1.7已知应⼒分量中,求三个主应⼒。
解:在时容易求得三个应⼒不变量为,,特征⽅程变为求出三个根,如记,则三个主应⼒为记1.8已知应⼒分量,是材料的屈服极限,求及主应⼒。
解:先求平均应⼒,再求应⼒偏张量,,,,,。
由此求得:然后求得:,,解出然后按⼤⼩次序排列得到,,1.9 已知应⼒分量中,求三个主应⼒,以及每个主应⼒所对应的⽅向余弦。
解:特征⽅程为记,则其解为,,。
对应于的⽅向余弦,,应满⾜下列关系(a)(b)(c)由(a),(b)式,得,,代⼊(c)式,得,由此求得对,,代⼊得对,,代⼊得对,,代⼊得1.10当时,证明成⽴。
解:由,移项之得证得第五章简单应⼒状态的弹塑性问题5.1简述Bauschinger效应:解:拉伸塑性变形后使压缩屈服极限降低的现象5.2在拉杆中,如果和为试件的原始截⾯积和原长,⽽和为拉伸后的截⾯积和长度。
(完整版)弹塑性力学习题题库加答案.docx
第二章 应力理论和应变理论2— 15.如 所示三角形截面水 材料的比重 γ,水的比重 γ 1。
己求得 力解 :σ x = ax+by , σy =cx+dy- γy , τxy =-dx-ay ;根据直 及斜 上的 界条件,确定常数 a 、b 、c 、 d 。
解:首先列出OA 、 OB 两 的 力 界条件:OA :l 1=-1 ;l 2=0 ;T x= γ1 y ; T y =0σx =-γ1y ; τxy =0代入: σx =ax+by ; τxy =-dx-ay 并 注 意 此 : x =0得 : b=- γ1; a=0;OB : l 1=cos β ; l 2=-sin β, T x =T y =0:x cosxy sin0 yx cosy sin⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯( a )将己知条件: σ x=1xy=-dxyγ y-γ y ; τ; σ =cx+dy-代入( a )式得:1 y cos dx sin0L L L L L L L L L bdx coscxdyy sin L L L L L L L L L化 ( b )式得: d = γ12β;ctgT4n2τ 30° δ 30°30°化 ( c )式得: c =γctg β -2γ 13y10x10Ox12 6τxy103 Pa2— 17.己知一点 的 力 量6 10 00 0δ y求 点的最大主 力及其主方向。
x题1-3 图解:由 意知 点 于平面 力状 ,且知:σx =12×O103σ y =10× 103 τ xy =6× 103,且 点的主 力可由下式求得:β212 101221.2xyxy21023n 22xy22610βγ 1y113710311 6.0828 10317.083 10 3 Paγ34.91724 10BA然:y117.083 10 3Pa2 4.917 10 3Pa30σ 1 与 x 正向的 角 : (按材力公式 算)c2 xy2 6 12 sin 2tg 2121026xycos2然 2θ 第Ⅰ象限角: 2θ=arctg ( +6) =+80.5376 °则:θ=+40.2688 B 40° 16'或(-139° 44')2— 19.己知应力分量为:σx=σy=σz=τxy=0,τzy=a,τzx=b,试计算出主应力σ1、σ2、σ3 并求出σ2 的主方向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
力无关,与此同时假定塑性应变增量与屈服面下次,不存在塑性体积变形,而且 拉伸和压缩的塑性几乎一致,这些假定对于金属材料基本满足,但对于岩石砼一 类脆性材料不适用。
Pie 平面上的点所代表的应力状态有何特点? 该平面上任意一点的所代表值的应力状态 1+2+3=0,为偏应力状态,且该平面上 任一法线所代表的应力状态其应力解不唯一。 固体力学解答必须满足的三个条件是什么?可否忽略其中一个?
10 什么是随动强化?试用单轴加载的情况加以解释?
2004 1 对于各项同性线弹性材料,应用广义胡克定律说明应力与应变主轴重合? x 2G X , xy G xy
y 2G y , yz G yz ,当某个面上的剪切应力为零时,剪应变也为零,这说 z 2G z , zx G zx
x x ( x, y ) 1 不相同。前面一个是 y y ( x, y ) ,后面是 z ( x y ) 0。 z 0
2
7 弹性应变能可以分解为哪两种Байду номын сангаас变能? 体积改变能和形状改变能。 8 在薄板弯曲中,哪些应力和应变分量较大?哪些应力分量较小?
( x , y , xy ) ( yz , zx ) z 。
9 对于各向同性弹性体,弹性应变能是否可以一定可以表示为应力不变量(或 应变不变量)的函数?为什么? 可以。弹性应变能是客观存在的,它与坐标系的选择无关。 10 对照应力张量 ij 与偏应力张量 Sij , 试问: 两者之间的关系?两者主方向之间 的关系?
1 S1 0 相同。 2 S 2 0 。 3 S3 0
线性弹性情况下独立的弹性常数只有两个。 3 与 Ritz 法相比较,有限元方法的优点主要是哪些? 在使用 Ritz 法进行近似求解时,需要在整个物体构造位移试验函数,对于复杂 的几何开头,这往往比较困难、有限元的基本思想则是:把整个求解区域分成许 多个有限小区域, 这些小区域称之为单元。 单元与单元之间保持位移连续; 然后, 在每一个单元上求热能,将所有单元上的势能加起来得弹性体的总势能,最后应 用最小势能原理求解单元节点位移。 4 最小势能原理能否适用于分析塑性力学问题?为什么? 5 物体稳定的充分条件如何用应力增量和应变增量表示?并说明对于线弹性该 条件是满足的。 6 用简单的位错模型说明为什么金属材料的屈服条件可以假定与静水压力无 关? 金属材料产生的塑性变形的原因可能是位错在晶体内运动, 引起晶体内原子层沿 滑动面滑动,即可解释为在剪切作用下的位错移动,即剪切滑移,与静水压力无 关。 7 理想塑性材料本构关系的塑性因子是通过什么来确定的? 实际问题中,如果微单元体周围物体还牌弹性阶段,由于要满足变形协调条件, 微单元体的塑性变形必然受到周围物体的限制,而不可能任意发展,这时塑性因 子的值是确定的,不过它不是通过微单元体本身的本构关系确定的,面是由问题 的整体条件来确定。理想弹塑性问题,就在平稳、几何和本构方程的基础上, 结 合屈服条件一起求解 8 以 Mises 等向硬化模型为例,试说明如何根据实验确定加载面的演化方程? 9 物体在一部分区域产生塑性变形后,便卸去所有荷载,假象将卸载后的物体 分割成许许多多的微小单元体,再将它们拼在一起,会产生何现象?为什么? 弹性本构关系和塑性本构关系的各自主要特点是什么? 对于弹性体,一点的应力应取决于该是点的应变状态,即应力是应变函 数: ,进入塑性状态后,应变不仅取决于应力状态,而且取决于应力 状态,而且还取决于应力历史
弹塑性力学简答题 2002 年 1 什么是偏应力状态?什么是静水压力状态?举例说明? 静水压力状态时指微六面体的每个面只有正应力作用, 偏应力状态是从应力状态 中扣除静水压力后剩下的部分。 2 从数学和物理的不同角度,阐述相容方程的意义。 从数学角度看,由于几何方程是 6 个,而待求的位移分量是 3 个,方程数目多于 未知函数的数目,求解出的位移不单值。从物理角度看,物体各点可以想象成微 小六面体,微单元体之间就会出现“裂缝”或者相互“嵌入” ,即产生不连续。 3 两个材料不同、但几何形状、边界条件及体积力(且体积力为常数)等都完 全相同的线弹性平面问题,它们的应力分布是否相同?为什么? 相同。应力分布受到平衡方程、变形协调方程及力边界条件,未涉及本构方程, 与材料性质无关。 4 虚位移原理等价于哪两组方程?推导原理时是否涉及到物理方程?该原理是 否适用于塑性力学问题? 平衡微分方程和静力边界条件。不涉及物理方程。适用于塑性力学问题。 5 应力状态是否可以位于加载面外?为什么? 不可以。保证位移单值连续。连续体的形变分量 x 、 y 、 xy 不是互相独立的, 而是相关,否则导致位移不单值,不连续。 6 什么是加载?什么是卸载?什么是中性变载?中性变载是否会产生塑性变 形? 加载:随着应力的增加,应变不断增加,材料在产生弹性变形的同时,还会产生 新的塑性变形,这个过程称之为加载。 卸载:当减少应力时,应力与应变将不会沿着原来的路径返回,而是沿接近于直 线的路径回到零应力,弹性变形被恢复,塑性变形保留,这个过程称之为卸载。 中性变载: 应力增量沿着加载面, 即与加载面相切。 应力在同一个加载面上变化, 内变量将保持不变, 不会产生新的塑性变形, 但因为应力改变, 会产生弹性应变。 7 用应力作为未知数求解弹性力学问题时,应力除应满足平衡方程外还需要满 足哪些方程? 协调方程和边界条件。 8 薄板弯曲中,哪些应力和应变分量较大?哪些应力和应变分量较小? 平面内应力分量最大,最主要的是应力,横向剪应力较小,是次要的应力;z 方 向的挤压应力最小,是更次要的应力。 9 什么是滑移线?物体内任意一点沿滑移线的方向的剪切应力是多少? 在塑性区内,将各点最大剪应力方向作为切线而连接起来的线,称之为滑移线。 剪切应力是最大剪应力。
虚功原理是否适用于塑性力学问题?为什么? 可以,因为虚功原理没有涉及物体的本构方程,没有规定应力应变之间的具体关 系 塑性内变量是否可以减小?为什么? 内变量,微观上: 宏观上:通过塑性应变和其他宏观变量构造而成 Tresca 屈服条件和 Mises 屈服条件是否适用于岩土材料?为什么? 不能,因为 Tresca 各 MISES 屈服条件假定屈服条件只取决于偏应力,而与静水 压力无关,与此同时假定塑性应变增量与屈服条件只取决于偏应力,而与静水压
2 Mises 屈 服 条 件 是 f J 2 S / 3 0 ,Drucker-Prager 屈 服 条 件 是
aI1 J 2 k 0 ,区别是前一个只考虑偏应力,而后面一个在考虑偏应力的基础 上还要考虑静水压力。 15 对于非稳定材料,正交流动法则是否成立?为什么? 不成立。有应变软化存在,所以不成立。 2006 1 为什么定义物体内部应力状态的时候要采取在一点的领域取极限的方法? 不规则,内部受力不一样。 2 应变协调方程的物理意义是什么? 对于单连通体,协调方程是保证由几何方程积分出单值连续的充分条件。多于多 连通体, 除满足协调方程方程外, 还应补充保证切口处位移单值连续的附加条件。 3 解释应力空间中为什么应力状态不能位于加载面之外? 保证位移单值连续。连续体的形变分量 x 、 y 、 xy 不是互相独立的,而是相关, 否则导致位移不单值,不连续。 4 举例说明屈服条件为各向同性的物理含义? 5 比较两种塑性本构理论的特点? 增量理论和全量理论。 增量理论将整个加载历史看成是一系列的微小增量加载过 程所组成,研究每个微小增量加载过程中应变增量与应力增量之间的关系,再沿 加载路径依次积分应变增量得最终的应变。全量理论不去考虑应力路径的影响, 直接建立应变全量与应力全量直接的关系。 6 固体力学解答必须满足的三个条件是什么?可否用其他条件代替? 可以。能量原理处于整个系统。 2008 1 已知物体内一组单值连续的位移,试问通过几何方程给出的应变一定满足变 形协调方程吗?为什么? 一定,从几何角度看,微单元体之间就会出现裂缝或者相互嵌入,即产生不连续 现象、而实际物体在变形后应保持连续,因此,6 个应变分量不能任意给定,必 须满足一定的协调关系,否则,就会导致位移不单值,不连续现象产生 2 对于各向同性超弹性体,其应变能是应力的三个不变量的函数,据此说明在
明应力的主方向与应变的主方向重合。 2 应力边界条件所描述的物理本质是什么? 物体边界点的平衡条件。 3 虚位移原理等价于哪两组方程?这说明了什么? 平衡微分方程和力边界条件,说明了虚位移原理是以能量形式表示的静力平衡。 4 最小势能原理的适用范围是什么?为什么? 仅对弹性保守系统有效,因为是在条件弹性保守系统的假定下进行的。 5 使用应力作为基本未知数求解弹性力学问题,应力应满足哪些方程? 本构方程和协调方程。 6 两个弹性力学问题,一个为平面应力,一个为平面应变,所有其它条件都相 同,试问两者的应力分布是否相同?
11 给定单值连续的位移函数,通过几何方程可求出应变分量,问这些应变分量 是否满足变形协调方程?为什么? 满足。根据几何方程求出各应变分量,则变形协调方程自然满足,因为变形协调 方程本身是从几何方程中推导出来的。
12 中性变载是否会产生塑性变形?是否会产生弹性变形?分别是为什么? 中性变载是应力增量沿着加载面,即与加载面相切。因应力在同一个面上变化, ,但因为应力改变, 内变量 将保持不变,不会产生新的塑性变形(连续性条件) 会产生塑性应变。 13 使用单轴拉伸和压缩的实验解释随动强化的意义。 14 使用 Mises 屈服条件和 Drucker-Prager 屈服条件,说明金属材料和岩土材 料屈服条件最本质的区别是什么?