欠驱动水面船舶的轨迹跟踪模型预测控制器
欠驱动船舶简捷鲁棒自适应路径跟踪控制_张国庆

4] 论述了欠驱动船舶不能满足 Brock系统。文献[ [5 ] ett 条件 的特性, 其控制器设计不能由任何连续时 不变的控制律实现。 尽管如此, 近年来不少学者在 路径 跟 踪 控 制 方 面 已 取 得 不 少 有 益 的 研 究 结 [610 ] 。文献[ 6]基于自适应 Backstepping 方法提 果 出了一种连续时不变的控制律, 实现了船舶位置指 数渐近稳定的控制结果, 然而该控制率未考虑对船 舶首向角的控制导致船舶在设定路径上打转 ; 文献 [ 7] 通过假设船舶首摇角速率为非零值来满足“连 续激励 ( persistent excitation,PE ) ” 的假设条件, 然 后利用 Lyapunov 直接法设计了 2 种较为完善的连 续时变控制律。 该算法中“首摇角速率为非零 ” 的 假设要求所跟踪的参考轨迹不能为直线 ; 为了解决 8]深入研究欠驱动船舶动态特性 这一问题, 文献[
-
1
问题描述
欠驱动水面船舶运动数学模型
· [16 ]
为
x = ucos ψ - vsin ψ · y = usin ψ + vcos ψ · ψ =r · - 1 u = f u( v ) + m τ u + d wu u - · v = f v( v ) + d wv - · 1 r = f r( v ) + τ r + d wr mr 其中:
0303. 0826. 收稿日期:2013网络出版时间:2014基金项目:国家自然科学基金资助项目( 51109020 ) ; 优博论文培育资 助项目( 2014YB01 ) ; 中央高校基本科研业务费基金资助 项目( 01780134 ; 3132014026 ) . ) ,男,博士研究生; 作者简介:张国庆( 1987) ,男,教授,博士生导师. 张显库( 1968Email: zhangxk@ dlmu. edu. cn. 通信作者:张显库,
欠驱动水面船舶航迹自抗扰控制研究
欠驱动水面船舶航迹自抗扰控制研究一、概述随着海洋资源的不断开发和利用,水面船舶在军事、民用等领域的应用越来越广泛。
对船舶的航迹控制精度和稳定性要求也日益提高。
传统的航迹控制方法往往受到风浪、水流等环境干扰的影响,导致控制效果不佳。
研究一种能够自适应调整、抗干扰能力强的航迹控制方法具有重要的现实意义。
欠驱动水面船舶作为一种特殊类型的船舶,其控制系统设计更具挑战性。
由于欠驱动系统具有较少的控制输入,但却需要实现复杂的控制目标,因此如何充分利用有限的控制资源,实现高精度的航迹控制,是欠驱动水面船舶控制领域的重要研究方向。
自抗扰控制作为一种新兴的控制方法,具有对不确定性干扰的强鲁棒性和自适应能力。
将自抗扰控制应用于欠驱动水面船舶的航迹控制中,能够有效提高船舶在复杂环境下的控制性能。
本文针对欠驱动水面船舶的航迹自抗扰控制进行研究,旨在提出一种高效、稳定的控制策略,为船舶的自主航行提供技术支持。
本文首先介绍了欠驱动水面船舶的航迹控制问题及其研究现状,然后详细阐述了自抗扰控制的基本原理和关键技术。
在此基础上,本文提出了一种基于自抗扰控制的欠驱动水面船舶航迹控制策略,并通过仿真实验验证了其有效性。
本文总结了研究成果,并展望了未来的研究方向。
1. 欠驱动水面船舶的定义与特点欠驱动水面船舶,是指在船舶的运动控制过程中,其系统控制输入量的个数少于船舶自由度维数的特殊类型水面船舶。
就是某些运动自由度上缺乏直接对应的驱动机构,需要通过其他自由度的控制进行间接调控。
这种船舶在海洋运输、渔业捕捞、军事侦察等领域均有广泛的应用。
欠驱动水面船舶的特点显著,首先体现在其控制输入维数的不足。
与全驱动船舶相比,欠驱动船舶无法通过直接的方式对所有自由度进行控制,而必须依赖系统内部的耦合作用实现间接控制。
通过调整船舶的航向或速度,实现对船舶位置的间接控制。
这种控制方式增加了控制的复杂性,但同时也为船舶设计带来了灵活性,使得欠驱动船舶在结构和成本上更具优势。
欠驱动水下无人航行器航迹跟踪滑模控制系统设计
欠驱动水下无人航行器航迹跟踪滑模控制系统设计张艺;余红英;刘琛【摘要】针对欠驱动水下无人航行器(Unmanned Underwater Vehicle,UUV)与外界复杂水文环境交互面临的特殊航迹跟踪的问题,研究了UUV航迹跟踪控制算法.基于UUV水平面动力学模型,设计了一种新型双闭环自适应航迹跟踪滑模控制系统,该系统能有效抑制外界干扰和不确定性的影响.首先,外环控制器中产生角度指令并传递给内环系统,外环产生的误差通过内环控制消除,同时设计内环控制律,在不需要惯性矩阵模型确切信息的情况下,通过姿态控制实现对外环产生的角度指令的跟踪.通过仿真及实际测试,均表明该控制方法能够实现对UUV精确的航迹跟踪.【期刊名称】《实验室研究与探索》【年(卷),期】2018(037)008【总页数】5页(P75-79)【关键词】位置控制器;姿态控制器;水下无人航行器;滑模控制【作者】张艺;余红英;刘琛【作者单位】中北大学电气与控制工程学院,太原030051;中北大学电气与控制工程学院,太原030051;中北大学电气与控制工程学院,太原030051【正文语种】中文【中图分类】TP2490 引言随着科学技术的发展,欠驱动UUV广泛应用于汇集海战场情报和海底区域作业中,其具备搜集海上水文、气象信息和辅助通信的使命。
轨迹跟踪在UUV作业中也扮演着无可取代的作用。
由于UUV具有的动力学复杂、输入输出非线性化、极易不稳定和欠驱动的特点,使得其在水下作业时极易受到外界复杂水文环境的影响,很难获得欠驱动UUV精准的动力学模型,因此进行欠驱动UUV航迹跟踪控制系统的设计十分必要[1-2]。
目前,关于UUV航迹跟踪控制已经有很多线性和非线性的系统控制策略和参数辨识方案,如自适应控制、智能PID、反演、H∞、模糊逻辑等控制方法,而其中航迹滑模跟踪控制可以高效抑制由于参数改变和外部扰动造成的不确定性影响,使系统实现对UUV三维轨迹的高精度跟踪,该控制器设计也适用于控制UUV非线性系统。
欠驱动USV航迹跟踪控制技术

题目:欠驱动USV航迹跟踪控制技术学号:姓名:联系方式:一、概述水面无人艇(Unmanned Surface Vessel, USV)是一种具有自主规划、自主航行能力,并可以自主方式或人工干预的方式完成环境信息感知、目标探测等任务的小型水面舰艇。
是由无人机UA V、地面机器人UGV、水下无人航行器UUV 以及水面无人艇组成的无人系统的重要组成部分。
各种无人系统共同的鲜明特点是系列化、模块化、分布式、网络化以及协调能力。
欠驱动的意思是指系统的独立控制输入的数量小于与系统本身需要控制的自由度的特性。
大多数水面船,水下潜器,航空航天器(包括直升机、航天飞机等),基准系统(包括倒立摆、球棒系统、柔性机械臂),非完整移动机器人(包括仿生机器人)以及交通运载工具(包括机车、吊车)都是典型的欠驱动特性系统。
无人艇的控制系统具有欠驱动特性。
无人艇的推进主要依靠安装于艇体尾部的喷水推进器,它和其他推进器的不同之处在于利用喷水泵喷出水流的反作用力来推动船舶前进,并通过操舵倒航设备分配和改变喷流方向来实现操纵控制。
航迹控制需要同时控制船舶的位置和航向,无人艇控制系统只有2个控制输入,需要同时控制无人艇平面运动的3个自由度,独立控制输入少于其自由度,属于典型的欠驱动系统。
无人艇的航迹跟踪控制就是指在艇体控制系统的驱动控制下,使艇从一定的初始位置航行进入预先规划好的航线上,始终保持稳定并能够沿着规划的航线抵达目的地。
目前,航迹跟踪控制是运动控制领域的主要研究热点之一,同时,研究无人艇的航迹跟踪控制能够为无人艇的精确攻击和快速作战提供有利信息,具有重要的实际应用价值。
随着作战方式的变革,无人作战系统成为未来军事武器装备发展的主流趋势并得到了世界各国的重视,如今己在陆海空等多维领域取得了实质性的进展。
如在空中领域发展的无人飞行器,在地面发展的无人车,在水下发展的无人潜航器以及在水面发展的无人艇等等。
无人作战平台成为未来战争中监视、侦查、探测、情报收集、准确打击、武装保护、执行特殊作战任务、实现有生力量零伤亡的重要手段。
欠驱动水面船舶的非线性滑模轨迹跟踪控制
trsis o n e a t ae u f c e s l ,t e e we e n i et r se si e s y d r c in,a d i r e o t l e it fu d r c u t d s r e v se s h r r o s h u tr n t wa ie t c a d h o n n o d rt c n r o o
一
() 4
式中 :
和 分 别 表 示 欠 驱 动 船 舶 的期 望 位 置
c om ;
程 意义 已成 为相 关 学 者关 注 的 热 点 … ; 驱 动水 面 欠
船 舶轨 迹跟 踪 中给定 的参 考轨 迹一 般可 以表 示为 时 间的 函数 , 即在 指 定 时 间 到 达 指 定 位 置 ; 驱 动 欠 船 舶 的轨迹 跟踪 控 制 对 参考 模 型 要 求 很 高 , 控制 器
D l nJ oo gU ie i , a a 1 0 6 C ia ai i t nvr t D l n 1 6 2 , hn ) a a n sy i
Ab t a t Co sd rn he mo e r me rc u c ra n is a d tme v r i g d su b n e n u e v s s r c : n i e g t d lpaa t n et i te n i — ay n itr a c s i d c d by wa e ,wi d, i i n
a n v l n n i e r si i g mo e c nr l lw s d sg e sn l i g mo e t c n q e ,i i w o h l i g o e o l a l n d o t a wa e in d u i g si n d e h i u s n v e f t e si n n d o d d
有横摇约束的欠驱动船舶航迹跟踪预测控制

G0(+,)/,1()*$/0*&%*05/0-,63/2-/3%*&&*:,$6 *%’$+(0-)/’-/(+ 5’0%-)(1(55(&5:,/30*&&)*$5/0-,$/5
gh5YI1-1+$ " ghW)(7I4+3$ " Y/SUW’)+#
!$;D(--434(.S)8(Q,81(+" /,*01+ 2+31+44*1+35+164*7189" /,*01+ $>"""$" DI1+,# #;2-4O8*1O,-,+R h+.(*Q,81(+ 2+31+44*1+3D(--434" ’1,+37) 5+164*7189" YI4+H1,+3#$#"$L" DI1+,$
摘&要!针对欠驱动水面船舶在直线航迹跟踪中受到强烈的风$浪$流时变干扰影响时出现大幅度的摇荡运动的情 况!采用自适应卡尔曼状态估计和鲁棒预测控制!提出一种具有横摇角约束的控制器综合设计方法" 建立时变干 扰作用下的仿射切换系统模型及测量模型%基于扩展状态的自适应卡尔曼滤波方法!对船舶模型的状态和随机干 扰力矩进行估计!并对估计的干扰力矩进行前馈补偿" 考虑船舶的真实状态与卡尔曼观测状态之间存在观测误 差!将控制器与观测器综合考虑!提出一种基于状态观测器和 /# G/m 混合性能指标的直接约束鲁棒预测控制!在性 能指标与控制器设计中直接利用观测状态%将状态约束$鲁棒稳定性约束$性能指标转化为 gch& 线性矩阵不等式’ 的凸优化问题" 理论证明了所设计闭环系统的一致有界稳定性!并且通过仿真验证了控制器能实现直线航迹鲁棒 跟踪!在保证横摇角在约束范围内!对干扰有着有效的抑制作用" 关键词!欠驱动船舶% 直线航迹跟踪% 横摇角约束% 自适应卡尔曼滤波% 混合 /# G/m 预测控制 !"##$"F$$%%" GHI4);#"$J$#"!% 网络出版地址!I88M# GGNNN;O+P1;+48GPOQ7GR48,1-G#LF$L%";);#"$@$""%;$K#!;"$";I8Q中图分类号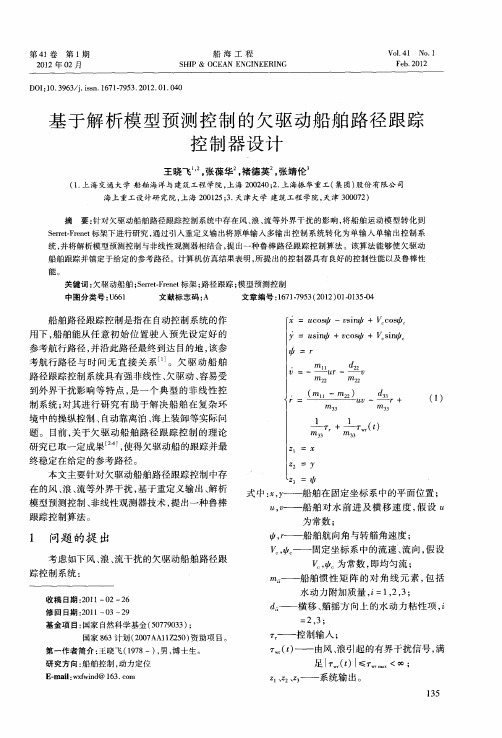
x = U O ̄ CS /一vi ̄ +vc s sn oo0
用下 , 船舶 能从 任 意初 始 位 置 驶 入 预先 设 定 好 的
参考 航行路 径 , 并沿此 路径 最终 到达 目的地 , 参 该
= ui0 +UO ̄ s n CS [ I+Vs 0 oi n
= r
考航 行路径 与 时 间无 直 接 关 系 。欠 驱 动 船 舶 路径 跟踪 控制 系统具 有强 非线性 、 驱动 、 欠 容易 受 到外 界干 扰影 响 等特 点 , 一 个 典 型 的非 线 性 控 是 制系 统 ; 其进 行 研究 有 助 于 解 决船 舶 在 复 杂 环 对 境 中的操纵 控制 、 自动 靠离 泊 、 上装 卸等 实 际问 海 题 。 目前 , 关于 欠 驱 动船 舶 路 径 跟 踪控 制 的理论 研 究 已取一 定成 果 4 , 得欠 驱动 船 的跟 踪并 最 。 使
应 用解 析模 型预测 控制 与非线 性 观测器 联合 控 制 的 方 法 _ , 过 推 导 整 理 , 到 风 、 、 干 6经 J 得 浪 流 扰下 的欠 驱动船 舶路 径跟 踪控制 律 。
与 分别为 点的单位法 向、 单位切 向向量 ; 沙 为 和 坐标 轴 之 间 的 角 度 ; u 为船 舶 对 水
速度, U=√ ; 为 u 与 的夹角, = u+
ac n v/ 。 rt ( .u ) a
令 : 一 + = + , 。 代表船舶路径 跟踪 的方 位误 差 , 则欠驱 动船 舶路 径跟 踪误 差 ,
的运 动方 程为
f /i 。 'oO= / + i =an +as  ̄ s Z O /  ̄ u s 2 c n
Sr t rnt er ee 标架下进行研究 , eF 通过引入重定义输 出将原单输 入多输 出控 制系统转 化为 单输入单 输 出控制 系
基于改进自适应积分视线制导方法的欠驱动无人水面艇路径跟踪控制
基于改进自适应积分视线制导方法的欠驱动无人水面艇路径跟踪控制作者:白一鸣刘磊韩新洁来源:《上海海事大学学报》2021年第04期摘要:为提高无人水面艇(unmanned surface vehicle, USV)对复杂海况的适应性,针对欠驱动USV的路径跟踪控制问题,设计基于改进的自适应积分视线(improved adaptive integral line-of-sight, IAILOS)制导方法和径向基神经网络(radial basis function neural network, RBFNN)的积分滑模路径跟踪控制器。
在IAILOS制导方法中,引入降阶的扩张状态观测器估计未知时变洋流速度,从而使得该制导方法不仅可以估计时变漂角,而且可以补偿未知时变洋流的扰动。
利用RBFNN的无限逼近特性来估计USV动力学模型中的不确定项和未知的外部环境干扰。
通过稳定性分析和仿真对比实验,验证了本文所设计的控制器的准确性和鲁棒性。
关键词:无人水面艇(USV); 路径跟踪控制; 改进的自适应积分视线(IAILOS)制导方法; 径向基神经网络(RBFNN); 滑模控制中图分类号: U664.82 文献标志码: AAbstract: To improve the adaptability of unmanned surface vehicles (USVs) to complex sea conditions, aiming at the path following control of underactuated USVs, an integral sliding-mode path following controller is designed based on the improved adaptive integral line-of-sight (IAILOS) guidance law and the radial basis neural network (RBFNN). The reduced-order extended state observer is introduced to estimate the unknown time-varying ocean current velocity in the IAILOS guidance law, so that the guidance law can not only estimate the time-varying drift angle, but also compensate the disturbances of unknown time-varying ocean currents. The infinite approximation property of RBFNN is used to estimate the uncertain terms in the USV dynamic model and the unknown external environment disturbances. The accuracy and robustness of the controller are verified through the stability analysis and simulation comparison experiments.Key words: unmanned surface vehicle (USV); path following control; improved adaptive integral line-of-sight (IAILOS) guidance law; radial basis function neural network (RBFNN); sliding-mode control0 引言無人水面艇(unmanned surface vehicle, USV)的路径跟踪控制目标是控制USV跟踪几何平面内的一条理想的参数化路径,并且没有时间限制[1]。
欠驱动水面船舶的曲线航迹跟踪控制
l e rw t t n o p i g a d n ta n b e t i e r c n r lt e r .F r a n n i e r mo e fa ta kn o to i a i s o g c u l n o me a l o l a o t h o y n h r n n o o o l a d lo r c ig c n r l n s se ,a ta k n o to r r s se w s c n tu t d at rg o a i e mo p i a d fe b c r n fr t n ; y tm r c i g c n r le r y tm a o s ce f lb ld f o r h s o r e f m n e d a k t somai s a o t i s se c n it o a c d d s b y tms h n e p ii fr l s o e fe b c r c i g c nr ll w we e h s y t m o s s ft c s a e u s s s wo e .T e x l t o mu a ft e d a k ta k n o t a r c h o p o o e y t e a p iai n o y p n v i c t o n a k t p i g sr tg .T e c n r l a a lme t r p s d b h p l t fL a u o  ̄d r t c o e meh d a d b c s p n t e y e a h o to l w c n i e n mp c r e t c i g o n e a t ae u f c e s l o e t i o d t n S mu ai n r s l ai a e t e p o o e u v a k n f u d r c u t d s r e v s es n a c r n c n i o . i l t e u t v l t h r p s d r a a i o s d ta k n t o o o . r c i g meh d lg y Ke wo d : n e a t a e u fc e s l r c i g c n rl a k tp i g;d f o r h s y r s u d r cu td s r e v s e ;ta k n o t ;b c se p n a o i e mo p im f
欠驱动船舶的航迹跟踪控制研究

摘要目前,海上航行的船舶大多数属于欠驱动船舶,对欠驱动船舶运动控制的研究对于降低设备成本,提高海上航行安全性具有重要意义。
本文对欠驱动船舶的航迹跟踪控制进行研究,主要内容包括:建立船舶6自由度运动的数学模型,分析船舶运动学和动力学特性,做进一步简化后得到欠驱动船舶的3自由度运动模型,为之后的研究和仿真打下基础。
针对路径跟踪控制过程中要求船速保持恒定而无法快速消除横向偏差的问题,将横向偏差和速度控制同时考虑到控制器的设计中,设计了一种基于LOS 引导律的时变速度路径跟踪控制器。
首先运用状态反馈和反步法分别推导出船舶的加速度,再利用最小二乘法对求得的两个加速度进行估计,在此基础上得到最终的控制律。
仿真实验表明所设计的控制器能够使船舶根据横向偏差及其变化率调整速度,更快速地达到预设路径。
针对轨迹跟踪中常规的线性反馈控制容易引起船舶推力饱和以及能耗增加的问题,设计了基于CB引导律的非线性反馈控制器,将船舶轨迹跟踪过程中的位置偏差和速度偏差考虑到控制回路中,调节控制器性能。
设计了三组不同的控制器,在不同的初始条件下对线性反馈控制器和非线性反馈控制器进行对比,仿真实验验证了非线性反馈控制器的优越性。
针对存在外界干扰和模型参数不确定的轨迹跟踪控制问题,引入关于纵向速度偏差的一阶滑模面和关于横向速度偏差的二阶滑模面,设计了轨迹跟踪滑模控制器。
为了在不同的控制要求下得到最优的控制参数,设计了离散时间非线性模型预测和滑模级联的控制器,对滑模参数进行实时在线的优化。
分别以最小跟踪误差,最小到达时间和最低能耗为目标对控制性能进行评价,仿真实验表明经过实时参数优化后的滑模控制器能达到更好的控制效果。
关键词:欠驱动船舶,跟踪控制,引导律,反馈控制,滑模控制AbstractAt present,most of the ships sailing on the sea belong to underactuated ships. The research on the motion control of underactuated ships is of great significance for reducing the cost of equipment and improving the safety of marine navigation.This paper studies the track control of underactuated ships,and the main contents are as follows:To analyze the characteristic of the ship,a6-DOF maneuvering motion mathematic model is established.Then a simplified3-DOF mathematic model for underactuated ships is established,base on which the simulation can be implemented.Considering that the cross-track error can not be quickly eliminated because of the constant surge speed,a two-step speed-varying path following controller for underactuated vessels based on LOS guidance is proposed.The method of least squares is used to find an approximate solution for the ship acceleration,which is derived using state feedback and back stepping method respectively.Under this condition,the ship can adjust its speed according to the cross-track error and its derivative,which leads to faster convergence to the path.To solve the problem of the thrust saturation and the increase of energy consumption caused by conventional linear feedback control for trajectory tracking, nonlinear feedback terms based on the CB guidance law are introduced into the design of controller.Position errors and velocity errors are considered in the nonlinear feedback control loop,which can adjust the performance of the controller.Three cascaded controllers are developed and compared under different initial conditions. The superiority of the nonlinear feedback controller is verified.A sliding mode controller for trajectory tracking in the presence of environment disturbance and model uncertainty is designed.The control law is derived by introducing a first order sliding surface in terms of surge tracking errors and a second one in terms of lateral motion tracking errors.A discrete-time nonlinear model predictive controller is used to update the parameters of the sliding mode control surfaces to achieve minimum tracking error,minimum reaching time and minimum energy objectives.Three controllers are designed and compared through simulation.The results show that the cascaded controller has better performance.Key words:Underactuated ships,tracking control,guidance law,feedback control, sliding mode control目录第1章绪论 (1)1.1研究背景与意义 (1)1.2欠驱动船舶的运动控制特性 (2)1.2.1本质非线性 (2)1.2.2模型不确定 (2)1.2.3外界干扰 (3)1.2.4约束条件 (3)1.3欠驱船航迹跟踪控制研究概述 (4)1.3.1国外相关研究 (5)1.3.2国内相关研究 (7)1.4论文主要研究内容 (10)第2章欠驱动船舶的运动数学模型 (11)2.1参考坐标系的建立 (11)2.2运动学特性 (13)2.2.1线性速度变换 (13)2.2.2角速度变换 (13)2.3动力学特性 (14)2.3.1刚体运动数学模型 (14)2.3.2水动力数学模型 (16)2.3.3环境力数学模型 (19)2.3.4船舶控制力数学模型 (22)2.4欠驱动水面船舶3自由度模型 (22)2.4.1水面船舶3自由度运动数学模型 (22)2.4.2简化的欠驱动船舶水面运动数学模型 (23)2.5本章小结 (24)第3章基于LOS引导算法的变速度路径跟踪控制 (26)3.1LOS引导算法 (26)3.2路径跟踪问题描述 (28)3.3时变速度路径跟踪控制器设计 (30)3.3.1减小横向偏差 (30)3.3.2满足速度控制要求 (31)3.3.3控制律 (32)3.4仿真实验及分析 (32)3.5本章小结 (36)第4章基于CB引导算法的轨迹跟踪状态反馈控制 (37)4.1CB引导算法 (37)4.2反馈控制器设计 (38)4.2.1线性位置反馈和线性位置速度反馈控制器 (38)4.2.1非线性位置反馈和线性速度反馈控制器 (40)4.2.3非线性位置反馈和非线性速度反馈控制器 (42)4.3仿真实验及分析 (42)4.3.1偏差较小的情况 (44)4.3.2偏差较大的情况 (46)4.5本章小结 (49)第5章基于模型预测的轨迹跟踪滑模控制器 (50)5.1滑模变结构控制 (50)5.1.1滑模变结构控制的基本原理 (50)5.1.2滑模控制的趋近律 (53)5.1.3滑模变结构控制器的设计 (54)5.2欠驱动船舶轨迹跟踪滑模控制器设计 (55)5.2.1控制问题描述 (55)5.2.2参考轨迹的确定 (56)5.2.3控制律设计 (57)5.2.4稳定性分析 (59)5.3模型预测与滑模级联控制器设计 (60)5.3.1模型预测控制的基本原理 (60)5.3.2级联控制器设计 (62)5.4仿真实验及分析 (63)5.5本章小结 (70)第6章总结与展望 (71)6.1总结 (71)6.2展望 (72)致谢 (73)参考文献 (74)攻读学位期间公开发表论文 (78)第1章绪论1.1研究背景与意义世界经济的增长使得人类对于海洋资源的需求日益增大,航运业的繁荣使得水路运输和船舶工程也得到了快速发展。
欠驱动船舶航迹跟踪指令滤波滑模鲁棒控制

舶 纵 向速度 和艏摇 角的虚拟控 制律 镇 定航 迹跟 踪误 差 , 并 进 一步 设 计船 舶 艏摇 角速 度 虚拟 控 制律
镇 定艏 摇 角误 差 ; 将船 舶纵 向速 度和艏 摇 角速度 的虚拟 控 制律作 为新 的跟 踪 目标 , 采 用积 分方 法设
计基 于上 下界 的滑模 控制 器 , 克服 了常规反 步 法对 虚拟控 制律 求导 复杂 的 问题 , 避免 了微 分运 算在
王岩 , 朱齐丹 , 孟浩 , 刘 志 林
( 哈 尔滨 T 程大 学 自动 化 学 院 , 黑龙江 哈尔滨 1 5 0 0 0 1 )
摘
要: 为 实现 欠驱 动船舶 在模 型参 数 不确定 和外界 风浪 流干扰 情 况下 水平 面的航迹 跟踪 控制 , 提
出 了一种 指令 滤波 滑模鲁棒 控 制方 法 。利 用指 令 滤波 结合 反 步 法建 立航 迹 跟 踪误 差方 程 , 设计 船
un d e r a c t u a t e d s ur f a c e v e s s e l s
WA N G Y a n , Z H U Q i — d a n , ME N G H a o , L I U Z h i — l i n
( C o l l e g e o f A u t o ma t i o n , H a r b i n E n g i n e e r i n g U n i v e r s i t y , H a r b i n 1 5 0 0 0 1 , C h i n a )
p u t t r a c ki n g c o n t r o l i n t o s t a b i l i z e s u r g e s p e e d a n d c o u r s e a n g l e e r r o r us i ng t r a n s f o r ma t i o n e q u a t i o n.Th e n, a n o n l i n e a r s l i d i n g mo d e c o n t r o l l e r wa s d e s i g n e d b a s e d o n i n t e g r a t i o n i d e a s ,wi t h o u t e s t i ma t i n g un c e ta r i n— t i e s o f un d e r a c t u a t e d s ur f a c e v e s s e l mo d e l a n d e x t e r na l d i s t ur b a n c e s .Th e pr o b l e m o f a n a l y t i c a l a n d H a — me r i c a l d i f f e r e n t i a t i o n o f t he v i r t u a l c o n t r o l l a ws wa s o v e r c o me,c h a t t e in r g o f c o n t r o l i n p u t wa s c i r c u mv e n - t e d,a n d t h e s t a t i c e r r o r a n d o v e r s h o o t d e c r e a s e d.Th e r e s u l t s o f s i mu l a t i o n e x p e ime r nt s i n d i c a t e t h a t t h e c o n t r o l l e r i s r o b u s t a g a i n s t t h e s y s t e mi c v a r i a t i o n s a n d t i me - v a r y i n g e x t e na r l d i s t u r b a n c e s .Mo r e o v e r ,t h e t r a c k i n g c o n t r o l wi t h hi g h t r a c k i n g p r e c i s i o n i s a c hi e v e d b y t h e p r o p o s e d c o n t r o l me t h o d . Ke y wo r d s: u n d e r a c t u a t e d s u fa r c e v e s s e l ;p a r a me t e r u n c e ta r i n t i e s;e x t e r na l d i s t u r b a n c e s;t r a c k i n g c o n - t r o l ;c o mma nd i f l t e r ;s l i d i n g mo de c o n t r o l
一种欠驱动船舶直线路径跟踪的预测控制器设计方法
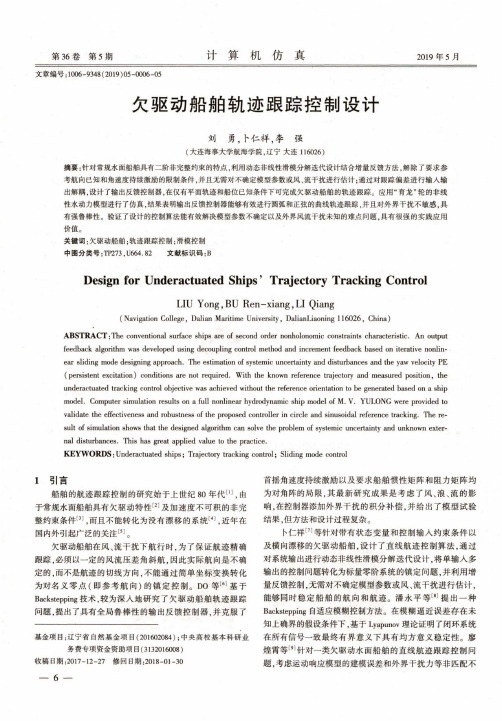
0 .5
] d 0 a r [ e -0 .5 ψ
-1 0 50 100 15 0 200 250 3 00
] d 0 .5 a r [ e w0
-0 .5 0 50 100 15 0 200 250 3 00
1
Time [s]
(L
+ L
ρ f
g1
L
ρ f
1
h
)
+
1
∑ (k
i=1
ρ
i
1
+ p L
控制目标是:设计控制器 τ r 使得欠驱动船舶在外界干扰
(2 )
作如下假设:
m1 1 < m2 2
(3 )
并引入重定义输出: (1 )
we =ψ e + arcsin ky 1 + ( ky) 2
(m m2 2 ) r = 11 uv m3 3 z1 = y z2 =ψ
(4 )
则控制系统 (1 ) 转化为如下等价的单输入单输出控制系 统:
y = u sin ψ + v cosψ ψ= r v= m11 ur m22 d 22 v m 22 d 33 1 1 τ+ τ (t ) r+ m33 m3 3 r m33 w r
ψ e
图 1 船舶直线路径跟踪控制系统示意图
τ wr ( t ) 的影响下能够跟踪给定的直线参考路径。
定义
ψe = ψ+ φ= ψ + arctan v u
y = ut s in we 1+ (ky )
2
utky 1 + ( ky ) +
2
其中: y 表示船舶的横向位移;u, v 分别为船舶前进与横
欠驱动船舶的运动规划和全局指数跟踪控制

欠驱动船舶的运动规划和全局指数跟踪控制王岩;朱齐丹;刘志林;杨震【摘要】In order to realize tracking arbitrary specified trajectory, a motion planning method is presented. All the desired attitudes are obtained by combining cubic spline interpolation, ship dynamic model, and discrete expected dots. Meanwhile, in order to realize fast tracking trajectory of underactuated surface vessels, global exponential tracking control law is proposed. Trajectory tracking error dynamic equation consists of two cascade subsystems based on diffeomorphism transformation. Then global exponential tracking control law is designed by using backstepping for error subsystems. The results of simulation experiments indicate that the proposed controller can effectively track arbitrary specified curve trajectory.%针对目前欠驱动船舶航迹跟踪控制难以实现跟踪任意可行航迹问题,提出一种运动规划方法.利用多项式拟合,并结合船舶动力学模型,通过离散期望点规划出操作性可实现的全部期望姿态.同时,为实现欠驱动船舶的航迹快速跟踪控制,提出一种全局指数航迹跟踪控制律.引入微分同胚变换,建立两个级联的子系统构成的航迹跟踪误差动态方程;基于反步法的设计原理,运用Lyapunov直接方法对变换后的误差系统设计了全局指数航迹跟踪控制律.仿真结果验证了所提出的全局指数航迹跟踪控制律能够有效实现跟踪任意可行航迹.【期刊名称】《计算机工程与应用》【年(卷),期】2013(049)005【总页数】6页(P18-22,69)【关键词】欠驱动船舶;运动规划;跟踪控制;反步;指数稳定【作者】王岩;朱齐丹;刘志林;杨震【作者单位】哈尔滨工程大学自动化学院,哈尔滨150001;哈尔滨工程大学自动化学院,哈尔滨150001;哈尔滨工程大学自动化学院,哈尔滨150001;哈尔滨工程大学自动化学院,哈尔滨150001【正文语种】中文【中图分类】U664近年来,欠驱动系统的运动控制问题一直是倍受关注的研究热点。
欠驱动船舶轨迹跟踪控制设计
欠驱动船舶在风、流 干 扰 下 航 行 时 ,为了保证航迹精确 跟 踪 ,必须以一定的风流压差角斜航,因此实际航向是不确 定 的 ,而不是航迹的切线方向,不能通过简单坐标变换转化 为 对 名 义 零 点 (即 参 考 航 向 )的 镇 定 控 制 。D O 等 [61基于 Backstepping技 术 ,较 为 深 人 地 研 究 了 欠 驱 动 船 舶 轨 迹 跟 踪 问 题 ,提 出 了 具 有 全 局 鲁 棒 性 的 输 出 反 馈 控 制 器 ,并 克 服 了
Design for Underactuated Ships5 Trajectory Tracking Control
LIU Yong, BU R en-xiang, LI Qiang
( Navigation College, Dalian Maritime University, DalianLiaoning 116026, China)
基于最小二乘法的欠驱动水面船舶模型预测控制

基于最小二乘法的欠驱动水面船舶模型预测控制
刘强;刘西军;程武伟
【期刊名称】《造船技术》
【年(卷),期】2024(52)2
【摘要】针对欠驱动水面船舶轨迹跟踪控制问题,根据模型预测控制(Model Predictive Control, MPC)原理,提出一种基于参数化模型的非线性模型预测控制(Parameterized Model-Nonlinear Model Predictive Control, PM-NMPC)方法。
采用最小二乘法对船舶的参数化模型进行辩识,设计PM-NMPC控制器。
对环境干扰下的某集装箱船艏向角控制和轨迹跟踪进行试验,验证控制算法的有效性,并将该
控制器与比例积分微分控制器(Proportional plus Integral plus Derivative cotroller, PID cotroller)控制器进行对比。
仿真结果表明,PM-NMPC控制器轨迹
跟踪效果更好,对未知干扰具有更强的稳健性。
【总页数】7页(P24-29)
【作者】刘强;刘西军;程武伟
【作者单位】浙江华东测绘与工程安全技术有限公司;中国电建集团华东勘测设计
研究院有限公司
【正文语种】中文
【中图分类】U661.73
【相关文献】
1.欠驱动船舶路径跟踪的非线性模型预测控制
2.基于解析模型预测控制的欠驱动船舶路径跟踪控制器设计
3.基于欧拉迭代模型预测的欠驱动水面船舶路径跟踪控制
4.解析模型预测控制在欠驱动船舶路径跟踪控制中的研究
5.欠驱动水面船舶的轨迹跟踪模型预测控制器
因版权原因,仅展示原文概要,查看原文内容请购买。
有横摇约束的欠驱动船舶航迹跟踪预测控制

有横摇约束的欠驱动船舶航迹跟踪预测控制LIU Zhilin;LI Guosheng;ZHANG Jun【摘要】针对欠驱动水面船舶在直线航迹跟踪中受到强烈的风、浪、流时变干扰影响时出现大幅度的摇荡运动的情况,采用自适应卡尔曼状态估计和鲁棒预测控制,提出一种具有横摇角约束的控制器综合设计方法.建立时变干扰作用下的仿射切换系统模型及测量模型;基于扩展状态的自适应卡尔曼滤波方法,对船舶模型的状态和随机干扰力矩进行估计,并对估计的干扰力矩进行前馈补偿.考虑船舶的真实状态与卡尔曼观测状态之间存在观测误差,将控制器与观测器综合考虑,提出一种基于状态观测器和H2/H∞混合性能指标的直接约束鲁棒预测控制,在性能指标与控制器设计中直接利用观测状态;将状态约束、鲁棒稳定性约束、性能指标转化为LMI(线性矩阵不等式)的凸优化问题.理论证明了所设计闭环系统的一致有界稳定性,并且通过仿真验证了控制器能实现直线航迹鲁棒跟踪,在保证横摇角在约束范围内,对干扰有着有效的抑制作用.【期刊名称】《哈尔滨工程大学学报》【年(卷),期】2019(040)002【总页数】6页(P312-317)【关键词】欠驱动船舶;直线航迹跟踪;横摇角约束;自适应卡尔曼滤波;混合H2/H∞预测控制【作者】LIU Zhilin;LI Guosheng;ZHANG Jun【作者单位】【正文语种】中文【中图分类】TP391.9目前,海上航行的大多数船舶依靠螺旋桨主推进器和舵装置控制船舶水平面位置和艏摇角3个自由度的运动,这属于典型的欠驱动系统。
欠驱动船舶在海洋中的航线通常由一系列转向点构成,转向点间为可近似为直线的恒向线,并且以定常或者近乎定常的速度进行长距离的直线航迹航行的情况最为常见[1-2]。
欠驱动船舶在航行过程中受到强烈的风、浪、流时变干扰作用,不仅产生较大的航迹跟踪误差,并且会出现剧烈的横摇运动,危害航行安全。
舵不仅能够产生艏摇力矩,还能够产生横摇力矩,利用舵产生的横摇力矩可以在控制航向的同时,还能够达到减摇的效果。
欠驱动自主水下航行器的镇定及跟踪
欠驱动自主水下航行器的镇定及跟踪I. 引言- 研究背景和意义- 国内外研究现状- 论文主要贡献和研究内容II. 欠驱动自主水下航行器概述- 自主水下航行器的种类和特点- 欠驱动自主水下航行器的结构和运动方式- 欠驱动自主水下航行器的建模和控制方法III. 航行器镇定设计- 镇定问题的定义和建模- 镇定控制器的设计与实现- 模拟实验与结果分析IV. 航行器跟踪控制- 跟踪问题的定义和建模- 跟踪控制器的设计与实现- 模拟实验与结果分析V. 总结与展望- 研究工作总结- 存在的问题及改进措施- 未来研究方向和展望VI. 参考文献注意:以上提纲仅供参考,具体可以根据论文要求进行调整和修改。
I. 引言自主水下航行器已经成为海洋科学与技术领域中广泛关注的研究课题之一。
这种航行器可以在海洋中独立运行,不需要人力进行遥控操作。
采用自主水下航行器进行海洋调查和勘测具有操作灵活、时间成本低廉、数据可靠等众多优势,因此被广泛应用于潜水、探油、海洋环境监测等领域。
欠驱动自主水下航行器是一种结构简单、控制难度较大的航行器。
它主要依靠姿态的调节来改变自身的运动方向,在海洋环境中具有卓越的机动能力。
因此,提高欠驱动自主水下航行器的控制性能具有十分重要的现实意义。
其中,镇定及跟踪技术是提高自主水下航行器控制性能的关键。
本文首先概述了欠驱动自主水下航行器的特点和控制方法,然后分别从镇定和跟踪两个角度进行探讨。
为了稳定航行器的姿态,镇定控制器需要对水下航行器的姿态进行监测,并对其进行稳定的调整。
而对于跟踪控制器,需要实时跟踪目标船只或物体进行控制,以实现预定路径的运动目标。
在本文中,我们将分别讨论这两个控制问题,提出相应的解决方法,并针对这两个问题进行数值模拟实验,验证所提出的控制方法的可行性和有效性。
最后,本文总结了研究成果并展望了未来的研究方向。
II. 欠驱动自主水下航行器概述欠驱动自主水下航行器是一种具有结构简单、控制难度较大的特性的航行器。
带输入饱和的欠驱动水面船参数自适应滑模控制
带输入饱和的欠驱动水面船参数自适应滑模控制水面船是一种重要的交通工具,具有载货量大、速度快等优点,因此被广泛应用于海上运输、河流交通、港口作业等领域。
然而,水面船的动力学特性复杂,容易受到海浪、风力等外部干扰影响,船体运动难以准确控制,存在安全隐患。
因此,如何提高水面船的运动控制效能,成为当前研究的热点问题。
本文基于水面船参数自适应滑模控制理论,针对带输入饱和的欠驱动水面船进行研究,提出了一种新的控制方法,旨在提高水面船的运动控制精度和稳定性,为水面船的安全运行提供技术支持。
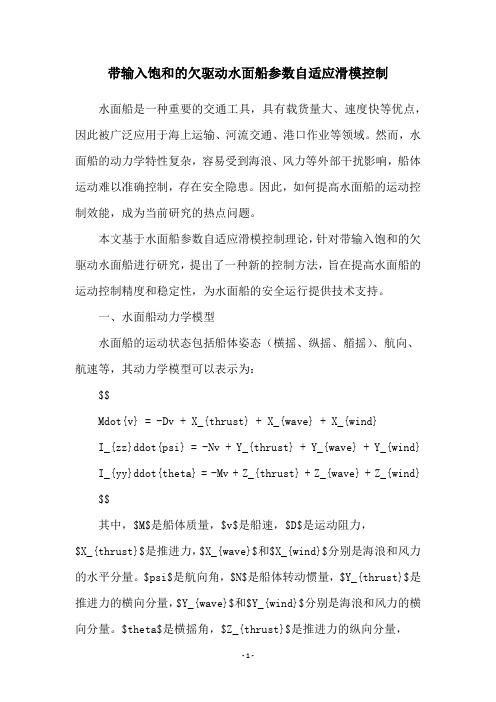
一、水面船动力学模型水面船的运动状态包括船体姿态(横摇、纵摇、艏摇)、航向、航速等,其动力学模型可以表示为:$$Mdot{v} = -Dv + X_{thrust} + X_{wave} + X_{wind}I_{zz}ddot{psi} = -Nv + Y_{thrust} + Y_{wave} + Y_{wind} I_{yy}ddot{theta} = -Mv + Z_{thrust} + Z_{wave} + Z_{wind} $$其中,$M$是船体质量,$v$是船速,$D$是运动阻力,$X_{thrust}$是推进力,$X_{wave}$和$X_{wind}$分别是海浪和风力的水平分量。
$psi$是航向角,$N$是船体转动惯量,$Y_{thrust}$是推进力的横向分量,$Y_{wave}$和$Y_{wind}$分别是海浪和风力的横向分量。
$theta$是横摇角,$Z_{thrust}$是推进力的纵向分量,$Z_{wave}$和$Z_{wind}$分别是海浪和风力的纵向分量。
二、水面船参数自适应滑模控制在水面船控制中,传统的PID控制方法存在控制精度低、鲁棒性差等问题,因此需要采用更为先进的控制方法。
本文采用参数自适应滑模控制方法,通过对船体状态进行估计和修正,实现对船体运动的精确控制。
参数自适应滑模控制方法的基本思路是,在滑动面上设计一个自适应控制器,通过反馈控制来实现滑动面上的动态调整,从而实现对系统的控制。
欠驱动水面船舶的有限时间航迹跟踪控制

欠驱动水面船舶的有限时间航迹跟踪控制
王昱棋;李铁山
【期刊名称】《哈尔滨工程大学学报》
【年(卷),期】2017(038)005
【摘要】针对欠驱动水面船舶的快速航迹跟踪控制问题,本文设计了一种基于终端滑模控制方法的分散控制器.通过引入辅助线性滑模面进行切换控制,避免了传统终端滑模面中状态可能为零而导致控制无穷大的奇异问题,且使欠驱动水面船舶能够在有限时间内快速跟踪并保持期望的轨迹.本文结合有限时间稳定性理论证明了终端滑模控制方法具有限时间收敛作用这一特性;借助Lyapunov稳定性理论证明了闭环系统的稳定性.仿真结果表明:该算法控制效果良好,且对外界环境干扰具有一定的鲁棒性能.
【总页数】6页(P684-689)
【作者】王昱棋;李铁山
【作者单位】大连海事大学航海学院,辽宁大连116026;大连海事大学航海学院,辽宁大连116026
【正文语种】中文
【中图分类】TP273.2
【相关文献】
1.高性能欠驱动水面机器人的有限时间跟踪控制 [J], 刘海涛;田雪虹;王贵
2.欠驱动水面船舶非线性信息融合航迹跟踪控制 [J], 胡洲;王志胜;甄子洋
3.欠驱动水面船舶的曲线航迹跟踪控制 [J], 曾薄文;朱齐丹;于瑞亭
4.基于有限时间控制的欠驱动水面船舶直线航迹跟踪 [J], 张军;李国胜;张天宏;刘志林
5.有横摇约束的欠驱动船舶航迹跟踪预测控制 [J], LIU Zhilin;LI Guosheng;ZHANG Jun
因版权原因,仅展示原文概要,查看原文内容请购买。