二轴舰船摇摆试验台
倾斜摇摆试验台(倾斜摇摆试验机)厂家技规书
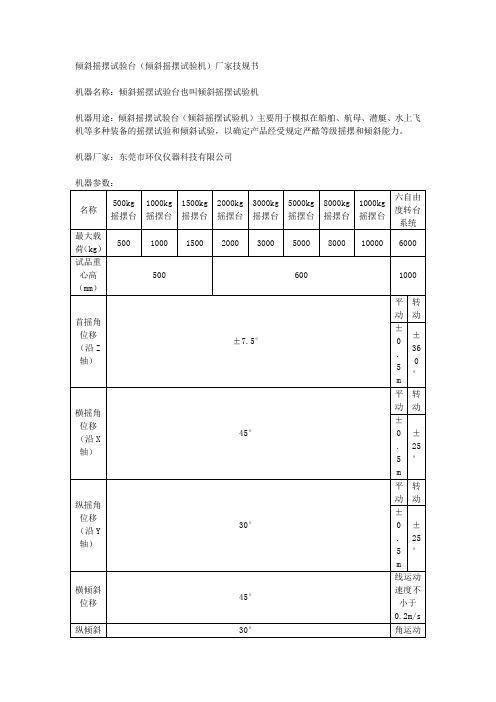
倾斜摇摆试验台(倾斜摇摆试验机)厂家技规书机器名称:倾斜摇摆试验台也叫倾斜摇摆试验机机器用途:倾斜摇摆试验台(倾斜摇摆试验机)主要用于模拟在船舶、航母、潜艇、水上飞机等多种装备的摇摆试验和倾斜试验,以确定产品经受规定严酷等级摇摆和倾斜能力。
机器厂家:东莞市环仪仪器科技有限公司机器参数:名称500kg摇摆台1000kg摇摆台1500kg摇摆台2000kg摇摆台3000kg摇摆台5000kg摇摆台8000kg摇摆台1000kg摇摆台六自由度转台系统最大载荷(kg)500 1000 1500 2000 3000 5000 8000 10000 6000 试品重心高(mm)500 600 1000 首摇角位移(沿Z 轴)±7.5°平动转动±.5m±36°横摇角位移(沿X 轴)45°平动转动±.5m±25°纵摇角位移(沿Y 轴)30°平动转动±.5m±25°横倾斜位移45°线运动速度不小于0.2m/s纵倾斜30°角运动位移 速度 不大于10°/S 周期(s ) 3~14 台面尺寸(mm ) 1350×1000 1500×12001500×12001600×14001800×16002000×18002500×22003000×25004000×5000电源及消耗功率 AC380V 45KVA AC380V 55KVA AC380V 55KVA AC380V 75KVA AC380V 75KVA AC380V 80KVA AC380V 110KVA AC380V 150KVA AC380V 40KVA 重量(kg ) 2000300035004000500060008000100008000满足要求 GJB150 GB/2423(备注:以上指标仅供选型参考,实际参数以产品说明书为准)。
cb 1146.8—1996 舰船设备环境试验与工程导则 倾斜和摇摆
cb 1146.8—1996 舰船设备环境试验与工程导则倾斜和摇摆1. 引言1.1 背景:随着现代舰船的发展,舰船设备环境试验与工程导则成为保证舰船设备正常运行和安全的重要手段之一。
在实际使用过程中,倾斜和摇摆是常见的环境因素,对舰船设备的性能和可靠性产生影响。
因此,对倾斜和摇摆进行相关试验分析变得至关重要。
1.2 目的:本文旨在深入研究cb 1146.8—1996(舰船设备环境试验与工程导则)中有关倾斜和摇摆的规定,并分析其关键要点。
通过对这些内容的梳理和总结,希望能够提供给读者一个清晰而详尽的指引,使其能够更好地理解该标准中倾斜和摇摆试验的要求与方法。
1.3 研究意义:倾斜和摇摆是舰船设备运行过程中常见的环境因素,直接影响着设备的工作效果以及人员的安全。
通过对cb 1146.8—1996标准中关于倾斜和摇摆试验内容的梳理分析,不仅能够帮助我们更好地了解这些试验的目的和方法,还能为舰船设计者、制造商以及使用者提供一份可靠的参考,以确保舰船设备在各种倾斜和摇摆环境下正常运行,并为其安全性能提供保障。
这对于提高舰船设备的质量和可靠性具有重要意义,也在一定程度上推动了相关领域的技术发展和应用研究。
通过本文对cb 1146.8—1996标准中关于倾斜和摇摆试验要点分析的详细介绍,读者将能够更全面地了解该标准,在实际工作中更加准确地进行试验设计与操作,并能够根据试验结果提出相应的改进措施。
同时,本文还将通过实践案例分享与结论总结部分,向读者展示实际应用该标准所取得的成果,并对未来研究方向及发展趋势进行展望。
2. cb 1146.8—1996简介:2.1 标准内容概述《cb 1146.8—1996 舰船设备环境试验与工程导则》是中国船级社于1996年发布的一项标准,旨在规范舰船设备环境试验的方法和流程,以确保舰船设备在各种环境条件下的正常运行和稳定性。
该标准主要包括了倾斜和摇摆两个方面的试验内容。
倾斜试验是通过模拟舰船在海上遭遇大角度倾斜情况时对设备造成的影响进行测试,而摇摆试验则是模拟舰船在海上受到波浪影响时产生的晃动情况对设备性能的影响进行测试。
倾斜与摇摆试验台设计

关键词: 倾斜与摇摆; 试验台; 机电液一体化; 集中控制; 工控机 中图分类号: TP29 文献标识码: A 文章编号: 1001 - 0785 ( 2013) 04 - 0115 - 02 Abstract: The tilting and swaying test rig is used to determine adaptability of the operation,storage and transportation of equipment in the tilting and swaying environment,acting as platforms for ship,seaplane and offshore oil prospection,which is the integration product of mechanics-electronics-hydraulics. The test rig can perform not only swaying motion as the sine law in three directions separately or complexly,but also synchronous composite swaying tests,tilt tests or asynchronous combined swaying and tilting movements. Keywords: tilting and swaying; test rig; integration of mechanics-electronics-hydraulics; centralized control; Industrial personal computer
舰船倾斜摇摆试验台的设计与试验

,
plication value. K ey words:tilting and swaying;test bench;stepping motor; closed loop control;design
Shenyang 110161,China;2.CQC(ShenYang)North Laboratory,Shenyang 110164,China)
Abstract:Aiming at the test of reliability for shipboard electric appliances in the laboratory environment, a new mechanism of tilting and swaying was proposed. The structure of the test bench was designed to realize the horizontal and vertical movement of the two hor izontal axes, a stepping motor was used as the driver,PLC and inverter were set up to control angle and speed of the test bench,two sensors were installed to detect the rea l pose situation.which can fo rm a closed loop control system with the use of the touch screen and the relays.This device has the advantages of high precision,light weight and low manufactur ing cost compared with the traditiona l tilting and swaying test bench .The typica l test results indicate that the bench can satisfy the requirem ents of the GD01-2006,which is called Chinese Guidelines f or Type Ap— proval Test of Electric and Electronic Products.The test results also show that the bench can monitor and modify the parameters in real time
摇摆试验台设计说明书毕业论文

摇摆试验台摘要本次设计的主要部分为摇摆试验台。
它在工业,机械,军事等方面有着很大的地位。
摇摆试验台一般用在船用、车用或者机用设备的调试与进行模拟训练,再者可以用于工厂化,自动化,机械化以与军事化的实验设备。
一般来说可以通过摇摆试验台来进行各方面模拟训练,以与实际操作。
其主要功能主要有有以下三个方面:1.位姿模拟、正弦波模拟、单自由度运动、多自由度复合运动。
2.路谱滤波处理,随机波复现,路谱、海浪谱、飞行谱复现等功能。
3.可以提供同步、外同步数据输出控制接口。
第一,我们可以依据摇摆试验台地工作地情况以与记忆性能,初步的来进行X 轴Y轴Z轴的结构分析重量计算,然后进行设计控制系统。
还有软件以与硬件的结构;第二,一般来说可以针对其主要模拟来进行数据分析。
这样的话就对后续地摇摆试验台地设计打下了基础。
以与对各支撑伸缩杆所受到地复杂化以与负载地干扰从而进行系统化深刻化地研究;第三,通过对摇摆试验台整体结构分析地参数以与位置来对输出地误差问题,从而来建立了补偿模型,这样的话即从理论上明确的提出了位置误差地补偿方法;最后,针对摇摆试验台机动性高,系统稳定等特点,本设计总结提出了一种两种控制相结合的控制策略,并进行实验推导以与理论实验验证。
通过实验数据得出来实验稳态精度;其最主要的还是是同时克服了作用地影响。
进而使摇摆试验台的系统更加完善更加稳定。
关键词:摇摆试验台位置误差控制借口路谱AbstractThe main part of this design is shaking table. It plays an important role in industry, machinery, military affairs and so on. The swing test platform is generally used for the commissioning and simulation training of marine, automotive or aircraft equipment, and can be used in factory, automation, mechanization and militarization of laboratory equipment. Generally speaking, it is possible to carry out various aspects of simulation training and actual operation by means of a shaking table. Its main functions mainly include the following three aspects:1. pose simulation, sine wave simulation, single degree of freedom motion, multi degree of freedom compound motion.2. channel spectrum filtering, such as random wave repetition, road spectrum, ocean wave spectrum, flight spectrum reappearance and so on.3. can provide internal synchronization and external synchronization data output control interface.First, we can carry out the structural analysis, weight calculation, and design control system of X axis, Y axis, Z axis, based on the shaking table test, the working conditions of the platform and the memory performance. And the software and hardware architecture;Second, in general, data analysis can be carried out for its main simulation. In this way, it laid a foundation for the design of the subsequent rocking test platform. As well as the complexity of the support telescopic rod and the interference of the load, so as to make a systematic and profound study;Third, through the rolling test platform overall structure analysis of parameters and the position of the error output, so as to set up a compensation model, it is clear from the theory put forward position error compensation method;Finally, in view of the high maneuverability and stability of the swing test rig, a control strategy combining two kinds of control is proposed, and the experiment is deduced and the theoretical experiment is verified. The steady-state accuracy of the experiment is obtained by experimental data. The most important thing is to overcome the influence of action simultaneously. And then make the swing test platform more perfect and more stable.Keywords shaking table: positionerror control excuse road spectrum摘要I关键词:IAbstract (II)Keywords shaking table: II绪论11.1 课题研究目的11.2摇摆试验台简介11.3摇摆试验台背景31.4摆试验台国外发展现状41.5课题的来源、目的和意义51.5.1课题的主要研究目的61.5.2课题意义61.6课题容7第2章三自由度摇摆试验台总体设计72.1引言72.1.1三自由度摇摆试验台的结构方案72.1.2三自由度摇摆试验台的性能指标92.1.3三自由度摇摆试验台的基本组成102.2三自由度摇摆试验台机械本体设计122.2.1三自由度摇摆试验台功能实现132.3三自由度摇摆试验台液压系统设计202.3.1液压系统202.3.2 液压刚的工作202.3.3液压刚的尺寸21第3章三自由度摇摆试验台三维建模与有限元分析223.1引言223.2三自由度摇摆试验台三维实体建模223.2.1三维实体的特点223.3三自由度摇摆试验台关键部件的有限元分析23第4章钢丝234.1钢丝球轴承234.2赫兹理论和椭圆接触区244.3接触单元254.4本章小结25第5章六自由度摇摆试验台位姿误差研究265.1 引言265.2 六自由度摇摆试验台位姿误差分析概述265.3 六自由度摇摆试验台位姿误差数学模型285.4 六自由度摇摆试验台位姿误差补偿305.5 综合分析30结论31参考文献32致36绪论摇摆试验台在近几年的发展中,从最早的航空航天军事发展中,逐渐被工厂化,更多的被用到各类大型机械设备,实验设备,他可以作为模拟海洋的动态性测试的关键设备,主要也用于船舶在海洋上的状态模拟,也可以用来测试各类光电设备,导航设备的性能。
船用摇摆试验台建模和控制系统设计
Li e h n H u n h u u L n Q ih n H uKe Lu e u Xu z o g a gS o x n i s e g oXu h i
Ab ta t Th i ua in s y t s y t m s a h g c u a e p y ia i lt n s s e ,wh c o t i s sr c : e s m l t wa e t s s e i i h a c r t h sc lsmu a i y t m o o ih c n a n ma h n r ,e e t i ,c mp t r n tu n e h oo y I c n smu a e wa s i s s y mo i n i h i e e t c i e y lc rc o u e ,i s r me t t c n l g . t a i l t r h p wa to n t e d f r n f g e twa e .Th d l n o t o y tm o h i lto wa e ts s e b s d wa s i s e u p n s ra v s e mo e d c n r ls s e f rt e smu a i n s y t s y t m e u e r h p q i me t a ts s i to u e .I cu e ,wo k o tt emo in mo e— wa c r 。d sg f o to y t m ft r e d g e e ti r d c d ti l d s n n r u h t d ls y s o e e i n o n r l s e o h e e r e o c s smu a i n s y t s y t m , n o rn i a e h ia r b e . Th i lto wa e ts s e p o i e i lto wa e ts s e a d s me p ic p l c n c l o l ms t p e smu a in s y t s y t m r v d s a u eu l i l t n t s e n o r h p q i me t ,i s o t e tt s n u e r d c u l y s f l smu a i e tm a s f r wa s i s e u p n s t h rs t s i o me ,e s r sp o u tS q ai . t Ke wo d : i lt n s y ts y t m c n r l y t m mo e y r s smu a i wa e ts s e o o to se s dl
模拟船舶海上摇晃的试验装置[实用新型专利]
![模拟船舶海上摇晃的试验装置[实用新型专利]](https://img.taocdn.com/s3/m/73824b3e6d85ec3a87c24028915f804d2b1687b6.png)
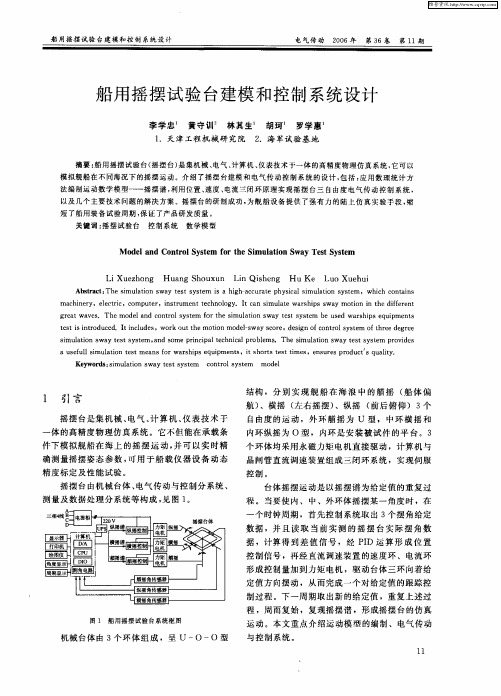
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 202021808244.X(22)申请日 2020.08.26(73)专利权人 浙江永峰环保科技股份有限公司地址 315100 浙江省宁波市鄞州区瞻岐镇鄞州经济开发区启航南路866-2号(72)发明人 周天宇 单丁一 (74)专利代理机构 杭州斯可睿专利事务所有限公司 33241代理人 唐迅(51)Int.Cl.G01M 10/00(2006.01)(54)实用新型名称模拟船舶海上摇晃的试验装置(57)摘要本实用新型公开了一种模拟船舶海上摇晃的试验装置,包括主架体、底架和气缸,主架体由横架和固定柱组成的L型框架,横架下端设有轴座,底架上设有固定座,轴座与固定座转动连接,气缸两端分别与固定柱和底架转动连接。
本实用新型得到的一种模拟船舶海上摇晃的试验装置,具有以下优点:结构简单,适用性广,制作成本低。
权利要求书1页 说明书2页 附图2页CN 212674405 U 2021.03.09C N 212674405U1.一种模拟船舶海上摇晃的试验装置,包括主架体(1)、底架(2)和气缸(3),其特征在于:主架体(1)由横架(4)和固定柱(5)组成,并构成L型框架结构,横架(4)下端设有轴座(6),底架(2)上设有固定座(7),轴座(6)与固定座(7)转动连接,气缸(3)两端分别与固定柱(5)和底架(2)转动连接。
2.根据权利要求1所述的一种模拟船舶海上摇晃的试验装置,其特征是:所述轴座(6)设在横架(4)中心位置。
3.根据权利要求1或2所述的一种模拟船舶海上摇晃的试验装置,其特征是:所述轴座(6)与横架(4)之间还设有加高座(8)。
4.根据权利要求3所述的一种模拟船舶海上摇晃的试验装置,其特征是:所述横架(4)中间还设有加强筋(9),加强筋(9)上设有安装孔(10)。
5.根据权利要求4所述的一种模拟船舶海上摇晃的试验装置,其特征是:所述底架(2)外侧还设有固定增强柱(11)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
船模横摇试验说明
一、船模横摇试验的目的及 方法:
船舶在海上风浪中的横摇运动,对船舶的安全及使用性能有很大的影响。
由于剧烈的横摇可能会引起船舱内货物的移动,造成船舶倾复。
横摇运动还会降低船舶的动稳性储备,增加在风浪中的倾复的危险。
此外,横摇还会使海上工作船舶,以及渔船等工作条件恶化,甚至无法工作。
因此在设计阶段判断估计船在风浪中的摇摆情况,作为设计的参考是很重要的。
船模横摇试验是估计船舶在风浪中横摇情况的一种很好的方法。
用船模试验确定船舶在海上的摇摆情况的方法,可以有两种:
1)船模静水横摇试验:这是一种间接的方法。
即根据船模在静水中的自由摇摆情况,主要是自摇周期及摇幅的衰减情况,求出一些决定船舶在波浪上摇摆幅度的参数,根据这些参数可以大致估计船舶在波浪上摇摆的情况。
静水横摇试验的方法是:将船模按要求调整好以后,横放在池中,给于一初始倾角(一般大于200)然后放开,应用装在船模内的自动记录装置,记录下摇摆的情况,记录装置一般是陀螺仪,也可以采用其他机械式装置,但装置本身的摩擦,阻尼必须很小,以免影响船模的运动情况造成误差,我们实验室是采用TC -6型航空陀螺仪,通过计算机采集记录,记录下的横摇曲线如图1,图中曲线表示摇摆角度随时间的变化,可以看出此时船舶是作一等周期ϕT 的摇摆运动,并且其摇幅逐渐减少,摇摆周期ϕT 称为船模的静水自由摇摆周期。
由摇摆理论知,船模自摇周期与船模的排水量D ,初稳性高度h ,及横摇惯性矩A ,附加惯性矩距ΔA 有关,可用下式计算:
Dh
A
A T ∆+=π
ϕ2 由于船模的排水量D ,惯性距A 以及初稳性高在试验时皆为已知,故上式可以用来计算附加惯性矩ΔA ,测量得到静水中自摇周期ϕT 则:
A Dh T A −=
∆π
ϕ22
船模横摇的摇幅衰减情况可以这样来表示:将相邻的两个摇幅依次相减,求出每次摆动中的衰减角
K ϕ∆摆至另一边的1+∆K ϕ,摇幅已减少即为:
1+−=∆k k k ϕϕϕ
再将一次摆动中的摇幅平均,得到代表这次摆动幅度大小的平均摇幅m θ
2
1
++=
k k m ϕϕϕ
将对应的m ϕ及k ϕ∆绘座标纸上,横座标m ϕ,纵座标为k ϕ∆,得到如图2的横摇消灭曲线。
这一曲线代表摇幅衰减的情况,摇幅的衰减情况也表示了阻尼的情况。
船模横摇时阻尼力越大,相应的其衰减也越快,对应某一平均摇幅m ϕ衰减角1+∆k ϕ也越大。
消灭曲线的形状,随船模情况变化而变化,一般可以近似用一二次方曲线代表,即:
2
1m m k b a ϕϕϕ+=∆+
其中,a ,b 为系数,可以用最小二乘方的办法与实验点最好的拟合的办法来确定,如船模的横摇阻尼力矩
也可以相应的用横摇角速度的关系式来表示,即:
.
)(ϕϕR M = .
2)(ϕϕW M ±=
则:1+∆K ϕ可相应表示为:
m k a ϕϕ=∆+1 2
1m k C ϕϕ=∆+
其中:A A A ∆+=1
求得自摆周期ϕT ,以及相应的阻尼系数R 。
W ,根据船舶摇摆理论可以计算船模在波浪上的摇摆情况。
如果船的横摇幅值很小,确论阻尼和角速度成线性关系,则可以直接应用线性横摇的理论结果,计算
出它的无因次衰减阻尼系数µ
m
ϕϕπµ∆⋅=
1 或 21ln 1k k ϕϕπµ=
若干模型试验资料表明,在线性范围内,无舭龙骨的船,05.0~035.0=µ;有舭龙骨船,
07.0~055.0=µ。
可以看到,这一办法很简便,即使在没有正规试验设备条件下,也可以做到,并且还可以测试出不同摇幅时的阻尼情况,所以对研究船模横摇运动是很重要的。
但由于,它是在静水中进行的,对于船与波浪间的一些相互作用则不能包含,所以是有一定局限性的。
2)船模波浪中横摇试验:也就是直接测量船模在横对某一规则波时的摇幅。
这一试验方法比较直接,包含的因素全面,也较可靠。
但是,由于横摇的情况与波浪的大小,有直接的关系,所以这一种试验方法,工作量大,要求试验设备条件也比静水横摇要求高。
试验的方法是将船模横置于水池中,两端用细绳连接于池壁上,然后按一定的方案,在水池内产生一系列不同波长(周期)的规则波(造波的范围必须包含船模自摇周期)。
用装于船模内的陀螺仪,测量出船模在每一规则波上的摇摆幅度,同时根据造波机频率和冲程计算出波倾角0α,算出相应于这一波浪周期的横摇放大因数0/αϕ,最后,对不同的波浪频率绘成放大因数0/αϕ曲线,如图3。
从图中可以看到,放大因数0/αϕ一般呈一尖峰形,峰点在船模自摇周期附近,这就是所谓的共振现象,对船模横摇来说是十分重要的。
阻尼系数越小,则共振的峰值越高,由于横摇的共振现象特征显著,曲线在共振点附近变化很大。
所以试验时在共振点附近必须特别注意,不然可能会得出不正确的结论。
图中,s ω为实船波浪频率,p s l λπω/2=,λ为实船与模型的缩尺比。
二、试验的准备工作
船模试验前必须首先对试验船模进行准备,将船模的压载调整至所需要的状态。
进行摇摆试验的船模,除与快速性试验一样,必须保持几何相似以外,由于摇摆运动不是匀速运动,因此还必须保证其惯性矩,重心高度等相似,即:
λ⋅=gm gs Z z m s A A 5λ=
gs Z ——实船重心高度; gm Z ——船模重心高度; s A ——实船横摇惯性矩;
m A ——船模横摇惯性矩; λ——比例=L s /L m
此外,为保证试验时流体动力部分相似(Froude 数相等),要求船模与实船的摇摆周期保持如下关系。
m s T T λ=
m T ——船模摇摆周期
1)
重心的调整:对船模重心高度的调整,可以利用倾斜试验的原理,将船模利用刀口刀架悬于
空中,如图4。
在船模内横向水平移动一重量P ,移动距离X ,此时船模将发生一倾斜角θ,可以看出: D ——船模排水量
1GG ——船模重心移动距离
由于
θSin OG GG 1=
OG ——船模重心至支点O 的距离
故:
θθSin OG D XCos =P
这样:
θCot D
PX
OG =
利用这一关系,由测量得到的倾斜角θ,即可求出重心位置。
为了测量方便起见,在支点O 以上高度
l 处,水平放一标尺,沿船横纵向剖面装一轻质的长指针则
g
l Cot =
θ
g ——指针在标尺上指出的由于倾斜角θ引起的偏移距离。
y ——也可以表示为OG 的关系式
OG
l
D PX y =
利用此一关系式,可以预先根据要求的重心位置OG 算出相应的y 值调整船模压载,使y 值符合即可,但注意调整压载时,重物P 不可移动。
2) 惯性矩的调整:惯性矩的调整同样利用上面的悬挂于空气中的刀口刀架。
根据复摆公式,船
模悬挂于刀口上的摆动周期0T 可以用下式计算:
OG
D A T 002π
=
由于排水量,重心位置皆为已知,故测出摆动周期0T 即可解出相应的,船模对刀口的惯性矩0A ,再利用称轴原理即可得到船模对重心的惯性矩。
2202OG g
D
OG D T A −=π
具体进行时可预先根据要求,利用以上关系算出0A ,再求出相应要求的0T ,调整压载使0T 符合,即可。
在安装刀口刀架系统时,应注意,刀架必须安装在纵中剖面内,并与试验时要求的横摇旋转轴平行。
还应注意,试验中装于船模内的记录装置,如陀螺仪等,应在调整前全部装上,参加调整。
模型还应注意防止试验中水溅入船模中,预先加高舷墙,或其他放水装置。
三、试验结果的分析:
静水横摇试验结果的分析整理:静水横摇试验的结果是计算机记录下的摇幅随时间的衰减曲线。
根据记录曲线上的时标,以及相邻的峰值间的距离,可以测量出自由摇摆周期。
计算时尽可能多取几个周期平均,以提高精确度。
由于在试验中一般确定零线比较困难,所以在计算中采用近似的方法,即量取全摇幅'
K ϕ然后依次相
减求得:
'
1'2+−=∆K K K ϕϕϕ
4
'1'm ++=k k ϕϕθ
计算时可列表如下:
序号
K ϕ 12+−=∆K K K ϕϕϕ
4/)(1++=K K m ϕϕϕ
1 2 3
4 . .
在计算K ϕ∆,m ϕ后,将计算所得的结果,点于座标纸上,绘出K ϕ∆~m ϕ曲线。
根据消灭曲线,可以采用两种方法进行分析。
一是将表中的K ϕ∆~m ϕ数值,采用二次方曲线逼近,用最小二乘方决定a ,b 数值。
或者近似用平方关系,阻尼系数N 表示即根据
2
m
K
N ϕϕ∆=
公式,对各个不同m ϕ时之K ϕ∆计算出N ~m ϕ曲线如图5。
如K ϕ∆~m ϕ曲线在一定范围内接近直线,也可以简单用直接逼近,计算出线性阻尼系数。
波浪中试验结果:首先由计算机采集记录曲线上量出波浪中横摇幅值,并依照记录的静校系数,换算成摇幅m ϕ此时为全摇幅2m ϕ。
同时根据造波周期P τ,依据冲程算出波浪的倾角0α,计算出放大因数
m ϕ/0α。
将对应于波浪频率s ω的放大因数ϕ/0α绘成ϕ/0α~s ω曲线,计算可依表格进行。