选修4-4坐标系与参数方程知识点总结和同步练习(附答案)
选修4-4坐标系与参数方程知识点总结及同步练习(附答案)---副本
坐标系与参数方程 知识点
1.平面直角坐标系中的坐标伸缩变换
设点
P(x,y)是平面直角坐标系中的任意一点,在变换
:
x y
gx gy
( 0)
的作用下,
( 0)
点 P(x,y)对应到点 P(x, y) ,称 为平面直角坐标系中的坐标伸缩变换,简称伸缩变换.
x 1 2t
1.若直线的参数方程为
y
2
3t
(t为参数)
,则直线的斜率为(
)
2
A.
3 3
C.
2
B. 2 3
D. 3 2
2.下列在曲线
x
y
sin 2 cos
sin
(为参数)
上的点是(
)
A. (1 , 2) B. ( 3 , 1) C. (2, 3) D. (1, 3)
单位长度相同。
选修 4-4
数学选修 4-4 坐标系与参数方程 [基础训练 A 组]
学而通 黄冈教育 教师: 赵映雄 学生:
数学选修 4-4 坐标系与参数方程 [综合训练 B 组] 数学选修 4-4 坐标系与参数方程 [提高训练 C 组]
数学选修 4-4 坐标系与参数方程
[基础训练 A 组]
一、选择题
参数方程而言,直接给出点的坐标间关系的方程叫做普通方程.
2.参数方程和普通方程的互化
(1)曲线的参数方程和普通方程是曲线方程的不同形式,一般地可以通过消去参数而从
参数方程得到普通方程.
(2)如果知道变数 x, y 中的一个与参数 t 的关系,例如 x f (t) ,把它代入普通方程,求
高中数学选修4—4(坐标系与参数方程)知识点总结

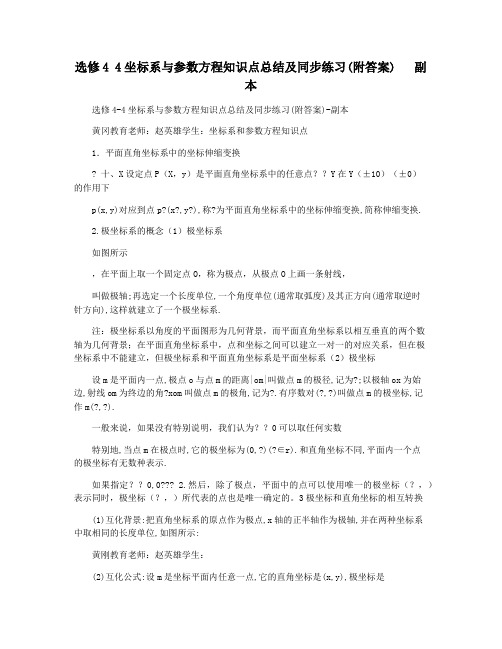
坐标系与参数方程知识点1.平面直角坐标系中的坐标伸缩变换设点P(x,y)是平面直角坐标系中的任意一点,在变换(0):(0)x xy y的作用下,点P(x,y)对应到点(,)P x y,称为平面直角坐标系中的坐标伸缩变换,简称伸缩变换.2.极坐标系的概念(1)极坐标系如图所示,在平面内取一个定点O,叫做极点,自极点O引一条射线Ox,叫做极轴;再选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系.注:极坐标系以角这一平面图形为几何背景,而平面直角坐标系以互相垂直的两条数轴为几何背景;平面直角坐标系内的点与坐标能建立一一对应的关系,而极坐标系则不可.但极坐标系和平面直角坐标系都是平面坐标系.(2)极坐标设M是平面内一点,极点O与点M的距离|OM|叫做点M的极径,记为;以极轴Ox为始边,射线OM为终边的角xOM叫做点M的极角,记为.有序数对(,)叫做点M的极坐标,记作(,)M.一般地,不作特殊说明时,我们认为0,可取任意实数.特别地,当点M在极点时,它的极坐标为(0,)(∈R).和直角坐标不同,平面内一个点的极坐标有无数种表示.如果规定0,02,那么除极点外,平面内的点可用唯一的极坐标(,)表示;同时,极坐标(,)表示的点也是唯一确定的.3.极坐标和直角坐标的互化(1)互化背景:把直角坐标系的原点作为极点,x轴的正半轴作为极轴,并在两种坐标系中取相同的长度单位,如图所示:(2)互化公式:设M是坐标平面内任意一点,它的直角坐标是(,)x y,极坐标是(,)(0),于是极坐标与直角坐标的互化公式如表:点M直角坐标(,)x y极坐标(,)互化公式cossinxy222tan(0)x yyxx在一般情况下,由tan确定角时,可根据点M所在的象限最小正角.4.常见曲线的极坐标方程曲线图形极坐标方程圆心在极点,半径为r的圆(02) r圆心为(,0)r,半径为r的圆2cos()22 r圆心为(,)2r,半径为r的圆2sin(0) r过极点,倾斜角为的直线(1)()()R R 或(2)(0)(0)和过点(,0)a ,与极轴垂直的直线cos()22a 过点(,)2a ,与极轴平行的直线sin(0)a 注:由于平面上点的极坐标的表示形式不唯一,即(,),(,2),(,),(,),都表示同一点的坐标,这与点的直角坐标的唯一性明显不同.所以对于曲线上的点的极坐标的多种表示形式,只要求至少有一个能满足极坐标方程即可.例如对于极坐标方程,点(,)44M 可以表示为5(,2)(,2),444444或或(-)等多种形式,其中,只有(,)44的极坐标满足方程.二、参数方程1.参数方程的概念一般地,在平面直角坐标系中,如果曲线上任意一点的坐标,x y 都是某个变数t 的函数()()x f t yg t ①,并且对于t 的每一个允许值,由方程组①所确定的点(,)M x y 都在这条曲线上,那么方程①就叫做这条曲线的参数方程,联系变数,x y 的变数t 叫做参变数,简称参数,相对于参数方程而言,直接给出点的坐标间关系的方程叫做普通方程.2.参数方程和普通方程的互化(1)曲线的参数方程和普通方程是曲线方程的不同形式,一般地可以通过消去参数而从参数方程得到普通方程.(2)如果知道变数,x y 中的一个与参数t 的关系,例如()x f t ,把它代入普通方程,求出另一个变数与参数的关系()y g t ,那么()()x f t yg t 就是曲线的参数方程,在参数方程与普通方程的互化中,必须使,x y 的取值范围保持一致.注:普通方程化为参数方程,参数方程的形式不一定唯一。
选修4-4坐标系与参数方程知识点总结及同步练习(附答案) - 副本

坐标系与参数方程 知识点1.平面直角坐标系中的坐标伸缩变换设点P(x,y)是平面直角坐标系中的任意一点,在变换(0):(0)x xy yλλϕμμ'=>⎧⎨'=>⎩的作用下,点P(x,y)对应到点(,)P x y ''',称ϕ为平面直角坐标系中的坐标伸缩变换,简称伸缩变换.2.极坐标系的概念 (1)极坐标系如图所示,在平面内取一个定点O ,叫做极点,自极点O 引一条射线Ox ,叫做极轴;再选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系.注:极坐标系以角这一平面图形为几何背景,而平面直角坐标系以互相垂直的两条数轴为几何背景;平面直角坐标系内的点与坐标能建立一一对应的关系,而极坐标系则不可.但极坐标系和平面直角坐标系都是平面坐标系. (2)极坐标设M 是平面内一点,极点O 与点M 的距离|OM|叫做点M 的极径,记为ρ;以极轴Ox 为始边,射线OM 为终边的角xOM ∠叫做点M 的极角,记为θ.有序数对(,)ρθ叫做点M 的极坐标,记作(,)M ρθ.一般地,不作特殊说明时,我们认为0,ρ≥θ可取任意实数. 特别地,当点M 在极点时,它的极坐标为(0, θ)(θ∈R).和直角坐标不同,平面内一个点的极坐标有无数种表示.如果规定0,02ρθπ>≤<,那么除极点外,平面内的点可用唯一的极坐标(,)ρθ表示;同时,极坐标(,)ρθ表示的点也是唯一确定的. 3.极坐标和直角坐标的互化(1)互化背景:把直角坐标系的原点作为极点,x轴的正半轴作为极轴,并在两种坐标系中取相同的长度单位,如图所示:(2)互化公式:设M是坐标平面内任意一点,它的直角坐标是(,)x y,极坐标是(,)ρθ(0ρ≥),于是极坐标与直角坐标的互化公式如表:点M直角坐标(,)x y极坐标(,)ρθ互化公式cossinxyρθρθ=⎧⎨=⎩222tan(0)x yyxxρθ=+=≠在一般情况下,由tanθ确定角时,可根据点M所在的象限最小正角.4.常见曲线的极坐标方程曲线图形极坐标方程圆心在极点,半径为r的圆(02)rρθπ=≤<圆心为(,0)r,半径为r的圆2cos()22rππρθθ=-≤<圆心为(,)2rπ,半径为r的圆2sin(0)rρθθπ≤<过极点,倾斜角为α的直线(1)()()R R θαρθπαρ=∈=+∈或 (2)(0)(0)θαρθπαρ=≥=+≥和过点(,0)a ,与极轴垂直的直线cos ()22a ππρθθ=-<<过点(,)2a π,与极轴平行的直线sin (0)a ρθθπ=<<注:由于平面上点的极坐标的表示形式不唯一,即(,),(,2),(,),(,),ρθρπθρπθρπθ+-+--+都表示同一点的坐标,这与点的直角坐标的唯一性明显不同.所以对于曲线上的点的极坐标的多种表示形式,只要求至少有一个能满足极坐标方程即可.例如对于极坐标方程,ρθ=点(,)44M ππ可以表示为5(,2)(,2),444444ππππππππ+-或或(-)等多种形式,其中,只有(,)44ππ的极坐标满足方程ρθ=.二、参数方程 1.参数方程的概念一般地,在平面直角坐标系中,如果曲线上任意一点的坐标,x y 都是某个变数t 的函数()()x f t y g t =⎧⎨=⎩①,并且对于t 的每一个允许值,由方程组①所确定的点(,)M x y 都在这条曲线上,那么方程①就叫做这条曲线的参数方程,联系变数,x y 的变数t 叫做参变数,简称参数,相对于参数方程而言,直接给出点的坐标间关系的方程叫做普通方程. 2.参数方程和普通方程的互化(1)曲线的参数方程和普通方程是曲线方程的不同形式,一般地可以通过消去参数而从参数方程得到普通方程.(2)如果知道变数,x y 中的一个与参数t 的关系,例如()x f t =,把它代入普通方程,求出另一个变数与参数的关系()y g t =,那么()()x f t y g t =⎧⎨=⎩就是曲线的参数方程,在参数方程与普通方程的互化中,必须使,x y 的取值范围保持一致.注:普通方程化为参数方程,参数方程的形式不一定唯一。
选修4-4坐标系与参数方程知识点总结及同步练习(附答案) - 副本
坐标系与参数方程知识点1.平面直角坐标系中的坐标伸缩变换设点P(x,y)是平面直角坐标系中的任意一点,在变换的作用下,点P(x,y)对应到点,称为平面直角坐标系中的坐标伸缩变换,简称伸缩变换.2.极坐标系的概念(1)极坐标系如图所示,在平面内取一个定点,叫做极点,自极点引一条射线,叫做极轴;再选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系。
注:极坐标系以角这一平面图形为几何背景,而平面直角坐标系以互相垂直的两条数轴为几何背景;平面直角坐标系内的点与坐标能建立一一对应的关系,而极坐标系则不可.但极坐标系和平面直角坐标系都是平面坐标系。
(2)极坐标设M是平面内一点,极点与点M的距离|OM|叫做点M的极径,记为;以极轴为始边,射线为终边的角叫做点M的极角,记为。
有序数对叫做点M的极坐标,记作。
一般地,不作特殊说明时,我们认为可取任意实数。
特别地,当点在极点时,它的极坐标为(0,)(∈R)。
和直角坐标不同,平面内一个点的极坐标有无数种表示。
如果规定,那么除极点外,平面内的点可用唯一的极坐标表示;同时,极坐标表示的点也是唯一确定的.3.极坐标和直角坐标的互化(1)互化背景:把直角坐标系的原点作为极点,x轴的正半轴作为极轴,并在两种坐标系中取相同的长度单位,如图所示:(2)互化公式:设是坐标平面内任意一点,它的直角坐标是,极坐标是(),于是极坐标与直角坐标的互化公式如表:在一般情况下,由确定角时,可根据点所在的象限最小正角.4.常见曲线的极坐标方程注:由于平面上点的极坐标的表示形式不唯一,即都表示同一点的坐标,这与点的直角坐标的唯一性明显不同.所以对于曲线上的点的极坐标的多种表示形式,只要求至少有一个能满足极坐标方程即可。
例如对于极坐标方程点可以表示为等多种形式,其中,只有的极坐标满足方程。
二、参数方程1.参数方程的概念一般地,在平面直角坐标系中,如果曲线上任意一点的坐标都是某个变数的函数①,并且对于的每一个允许值,由方程组①所确定的点都在这条曲线上,那么方程①就叫做这条曲线的参数方程,联系变数的变数叫做参变数,简称参数,相对于参数方程而言,直接给出点的坐标间关系的方程叫做普通方程.2。
选修4-4坐标系与参数方程知识点总结及同步练习(附答案)---副本
选修4-4坐标系与参数方程知识点总结及同步练习(附答案)---副本坐标系与参数方程 知识点1.平面直角坐标系中的坐标伸缩变换 设点P(x,y)是平面直角坐标系中的任意一点,在变换(0):(0)x x y yλλϕμμ'=>⎧⎨'=>⎩g g 的作用下,点P(x,y)对应到点(,)P x y ''',称ϕ为平面直角坐标系中的坐标伸缩变换,简称伸缩变换.2.极坐标系的概念 (1)极坐标系如图所示,在平面内取一个定点O ,叫做极点,自极点O 引一条射线Ox ,叫做极轴;再选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系.注:极坐标系以角这一平面图形为几何背景,而平面直角坐标系以互相垂直的两条数轴为几何背景;平面直角坐标系内的点与坐标能建立一一对应的关系,而极坐标系则不可.但极坐标系和平面直角坐标系都是平面坐标系. (2)极坐标设M 是平面内一点,极点O 与点M 的距离|OM|叫做点M 的极径,记为ρ;以极轴Ox 为始边,射线OM 为终边的角xOM ∠叫做点M 的极角,记为θ.有序数对(,)ρθ叫做点M 的极坐标,记作(,)M ρθ.一般地,不作特殊说明时,我们认为0,ρ≥θ可取任意实数.特别地,当点M 在极点时,它的极坐标为(0,θ)(θ∈R).和直角坐标不同,平面内一个点的极坐标有无数种表示.如果规定0,02ρθπ>≤<,那么除极点外,平面内的点可用唯一的极坐标(,)ρθ表示;同时,极坐标(,)ρθ表示的点也是唯一确定的. 3.极坐标和直角坐标的互化(1)互化背景:把直角坐标系的原点作为极点,x 轴的正半轴作为极轴,并在两种坐标系中取相同的长度单位,如图所示:(2)互化公式:设M 是坐标平面内任意一点,它的直角坐标是(,)x y ,极坐标是(,)ρθ(0ρ≥),于是极坐标与直角坐标的互化公式如表:点M 直角坐标(,)x y极坐标(,)ρθ互化公式cos sin x y ρθρθ=⎧⎨=⎩222tan (0)x y yx xρθ=+=≠在一般情况下,由tan θ确定角时,可根据点M所在的象限最小正角. 4.常见曲线的极坐标方程 曲线 图形 极坐标方程圆心在极点,半径为r 的圆(02)r ρθπ=≤<圆心为(,0)r ,半径为r 的圆2cos ()22r ππρθθ=-≤<圆心为(,)2r π,半径为r 的圆2sin (0)r ρθθπ≤<过极点,倾斜角为α的直线(1)()()R R θαρθπαρ=∈=+∈或(2)(0)(0)θαρθπαρ=≥=+≥和过点(,0)a ,与极轴垂直的直线cos ()22a ππρθθ=-<<过点(,)2a π,与极轴平行的直线sin (0)a ρθθπ=<<注:由于平面上点的极坐标的表示形式不唯一,即(,),(,2),(,),(,),ρθρπθρπθρπθ+-+--+都表示同一点的坐标,这与点的直角坐标的唯一性明显不同.所以对于曲线上的点的极坐标的多种表示形式,只要求至少有一个能满足极坐标方程即可.例如对于极坐标方程,ρθ=点(,)44M ππ可以表示为5(,2)(,2),444444ππππππππ+-或或(-)等多种形式,其中,只有(,)44ππ的极坐标满足方程ρθ=.二、参数方程 1.参数方程的概念一般地,在平面直角坐标系中,如果曲线上任意一点的坐标,x y 都是某个变数t 的函数()()x f t y g t =⎧⎨=⎩①,并且对于t 的每一个允许值,由方程组①所确定的点(,)M x y 都在这条曲线上,那么方程①就叫做这条曲线的参数方程,联系变数,x y 的变数t 叫做参变数,简称参数,相对于参数方程而言,直接给出点的坐标间关系的方程叫做普通方程. 2.参数方程和普通方程的互化(1)曲线的参数方程和普通方程是曲线方程的不同形式,一般地可以通过消去参数而从参数方程得到普通方程.(2)如果知道变数,x y 中的一个与参数t 的关系,例如()x f t =,把它代入普通方程,求出另一个变数与参数的关系()y g t =,那么()()x f t y g t =⎧⎨=⎩就是曲线的参数方程,在参数方程与普通方程的互化中,必须使,x y 的取值范围保持一致.注:普通方程化为参数方程,参数方程的形式不一定唯一。
选修4-4坐标系与参数方程_知识点总结

坐标系与参数方程 知识点(一)坐标系1.平面直角坐标系中的坐标伸缩变换设点(,)P x y 是平面直角坐标系中的任意一点,在变换(0):(0)x xy yλλϕμμ'=>⎧⎨'=>⎩ 的作用下,点(,)P x y 对应到点(,)P x y ''',称ϕ为平面直角坐标系中的坐标伸缩变换,简称伸缩变换.2.极坐标系的概念(1)极坐标系如图所示,在平面内取一个定点O ,叫做极点,自极点O 引一条射线Ox ,叫做极轴;再选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系.注:极坐标系以角这一平面图形为几何背景,而平面直角坐标系以互相垂直的两条数轴为几何背景;平面直角坐标系内的点与坐标能建立一一对应的关系,而极坐标系则不可.但极坐标系和平面直角坐标系都是平面坐标系.(2)极坐标设M 是平面内一点,极点O 与点M 的距离|OM|叫做点M 的极径,记为ρ;以极轴Ox 为始边,射线OM 为终边的角xOM ∠叫做点M 的极角,记为θ.有序数对(,)ρθ叫做点M 的极坐标,记作(,)M ρθ.一般地,不作特殊说明时,我们认为0,ρ≥θ可取任意实数.特别地,当点M 在极点时,它的极坐标为(0, θ)(θ∈R).和直角坐标不同,平面内一个点的极坐标有无数种表示.如果规定0,02ρθπ>≤<,那么除极点外,平面内的点可用唯一的极坐标(,)ρθ表示;同时,极坐标(,)ρθ表示的点也是唯一确定的.3.极坐标和直角坐标的互化(1)互化背景:把直角坐标系的原点作为极点,x 轴的正半轴作为极轴,并在两种坐标系中取相同的长度单位,如图所示:(2)互化公式:设M 是坐标平面内任意一点,它的直角坐标是(,)x y ,极坐标是(,)ρθ(0ρ≥),于是极坐标与直角坐标的互化公式如表:在一般情况下,由tan θ确定角时,可根据点M 所在的象限最小正角.4.常见曲线的极坐标方程注:由于平面上点的极坐标的表示形式不唯一,即(,),(,2),(,),(,),ρθρπθρπθρπθ+-+--+都表示同一点的坐标,这与点的直角坐标的唯一性明显不同.所以对于曲线上的点的极坐标的多种表示形式,只要求至少有一个能满足极坐标方程即可.例如对于极坐标方程,ρθ=点(,)44M ππ可以表示为5(,2)(,2),444444ππππππππ+-或或(-)等多种形式,其中,只有(,)44ππ的极坐标满足方程ρθ=. 5.圆与直线一般极坐标方程(1)圆的极坐标方程若圆的圆心为 00(,)M ρθ,半径为r ,求圆的极坐标方程。
高中数学选修4—4(坐标系与参数方程)知识点总结[整理文档]
![高中数学选修4—4(坐标系与参数方程)知识点总结[整理文档]](https://img.taocdn.com/s3/m/b5c06d75cbaedd3383c4bb4cf7ec4afe04a1b10f.png)
坐标系与参数方程知识点1.平面直角坐标系中的坐标伸缩变换设点P(x,y)是平面直角坐标系中的任意一点,在变换(0):(0)x xy ygg的作用下,点P(x,y)对应到点(,)P x y,称为平面直角坐标系中的坐标伸缩变换,简称伸缩变换.2.极坐标系的概念(1)极坐标系如图所示,在平面内取一个定点O,叫做极点,自极点O引一条射线Ox,叫做极轴;再选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系.注:极坐标系以角这一平面图形为几何背景,而平面直角坐标系以互相垂直的两条数轴为几何背景;平面直角坐标系内的点与坐标能建立一一对应的关系,而极坐标系则不可.但极坐标系和平面直角坐标系都是平面坐标系.(2)极坐标设M是平面内一点,极点O与点M的距离|OM|叫做点M的极径,记为;以极轴Ox为始边,射线OM为终边的角xOM叫做点M的极角,记为.有序数对(,)叫做点M的极坐标,记作(,)M.一般地,不作特殊说明时,我们认为0,可取任意实数.特别地,当点M在极点时,它的极坐标为(0,)(∈R).和直角坐标不同,平面内一个点的极坐标有无数种表示.如果规定0,02,那么除极点外,平面内的点可用唯一的极坐标(,)表示;同时,极坐标(,)表示的点也是唯一确定的.3.极坐标和直角坐标的互化(1)互化背景:把直角坐标系的原点作为极点,x轴的正半轴作为极轴,并在两种坐标系中取相同的长度单位,如图所示:(2)互化公式:设M是坐标平面内任意一点,它的直角坐标是(,)x y,极坐标是(,)(0),于是极坐标与直角坐标的互化公式如表:点M直角坐标(,)x y极坐标(,)互化公式cossinxy222tan(0)x yyxx在一般情况下,由tan确定角时,可根据点M所在的象限最小正角.4.常见曲线的极坐标方程曲线图形极坐标方程圆心在极点,半径为r的圆(02) r圆心为(,0)r,半径为r的圆2cos()22 r圆心为(,)2r,半径为r的圆2sin(0) r过极点,倾斜角为的直线(1)()()R R 或(2)(0)(0)和过点(,0)a ,与极轴垂直的直线cos()22a 过点(,)2a ,与极轴平行的直线sin (0)a 注:由于平面上点的极坐标的表示形式不唯一,即(,),(,2),(,),(,),都表示同一点的坐标,这与点的直角坐标的唯一性明显不同.所以对于曲线上的点的极坐标的多种表示形式,只要求至少有一个能满足极坐标方程即可.例如对于极坐标方程,点(,)44M 可以表示为5(,2)(,2),444444或或(-)等多种形式,其中,只有(,)44的极坐标满足方程.二、参数方程1.参数方程的概念一般地,在平面直角坐标系中,如果曲线上任意一点的坐标,x y 都是某个变数t 的函数()()x f t yg t ①,并且对于t 的每一个允许值,由方程组①所确定的点(,)M x y 都在这条曲线上,那么方程①就叫做这条曲线的参数方程,联系变数,x y 的变数t 叫做参变数,简称参数,相对于参数方程而言,直接给出点的坐标间关系的方程叫做普通方程.2.参数方程和普通方程的互化(1)曲线的参数方程和普通方程是曲线方程的不同形式,一般地可以通过消去参数而从参数方程得到普通方程.(2)如果知道变数,x y 中的一个与参数t 的关系,例如()x f t ,把它代入普通方程,求出另一个变数与参数的关系()yg t ,那么()()x f t yg t 就是曲线的参数方程,在参数方程与普通方程的互化中,必须使,x y 的取值范围保持一致.注:普通方程化为参数方程,参数方程的形式不一定唯一。
选修4-4坐标系和参数方程知识点总结与同步练习(附答案解析)-副本
坐标系与参数方程 知识点1.平面直角坐标系中的坐标伸缩变换设点P(x,y)是平面直角坐标系中的任意一点,在变换(0):(0)x xy yλλϕμμ'=>⎧⎨'=>⎩的作用下,点P(x,y)对应到点(,)P x y ''',称ϕ为平面直角坐标系中的坐标伸缩变换,简称伸缩变换.2.极坐标系的概念 (1)极坐标系如图所示,在平面内取一个定点O ,叫做极点,自极点O 引一条射线Ox ,叫做极轴;再选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系.注:极坐标系以角这一平面图形为几何背景,而平面直角坐标系以互相垂直的两条数轴为几何背景;平面直角坐标系内的点与坐标能建立一一对应的关系,而极坐标系则不可.但极坐标系和平面直角坐标系都是平面坐标系. (2)极坐标设M 是平面内一点,极点O 与点M 的距离|OM|叫做点M 的极径,记为ρ;以极轴Ox 为始边,射线OM 为终边的角xOM ∠叫做点M 的极角,记为θ.有序数对(,)ρθ叫做点M 的极坐标,记作(,)M ρθ.一般地,不作特殊说明时,我们认为0,ρ≥θ可取任意实数.特别地,当点M 在极点时,它的极坐标为(0, θ)(θ∈R).和直角坐标不同,平面内一个点的极坐标有无数种表示.如果规定0,02ρθπ>≤<,那么除极点外,平面内的点可用唯一的极坐标(,)ρθ表示;同时,极坐标(,)ρθ表示的点也是唯一确定的. 3.极坐标和直角坐标的互化(1)互化背景:把直角坐标系的原点作为极点,x 轴的正半轴作为极轴,并在两种坐标系中取相同的长度单位,如图所示:(2)互化公式:设M 是坐标平面内任意一点,它的直角坐标是(,)x y ,极坐标是(,)ρθ(0ρ≥),于是极坐标与直角坐标的互化公式如表:点M直角坐标(,)x y极坐标(,)ρθ互化公式cos sin x y ρθρθ=⎧⎨=⎩222tan (0)x y yx xρθ=+=≠在一般情况下,由tan θ确定角时,可根据点M 所在的象限最小正角. 4.常见曲线的极坐标方程 曲线图形极坐标方程圆心在极点,半径为r 的圆(02)r ρθπ=≤<圆心为(,0)r ,半径为r 的圆2cos ()22r ππρθθ=-≤<圆心为(,)2r π,半径为r 的圆2sin (0)r ρθθπ≤<过极点,倾斜角为α的直线(1)()()R R θαρθπαρ=∈=+∈或(2)(0)(0)θαρθπαρ=≥=+≥和过点(,0)a ,与极轴垂直的直线cos ()22a ππρθθ=-<<过点(,)2a π,与极轴平行的直线sin (0)a ρθθπ=<<注:由于平面上点的极坐标的表示形式不唯一,即(,),(,2),(,),(,),ρθρπθρπθρπθ+-+--+都表示同一点的坐标,这与点的直角坐标的唯一性明显不同.所以对于曲线上的点的极坐标的多种表示形式,只要求至少有一个能满足极坐标方程即可.例如对于极坐标方程,ρθ=点(,)44M ππ可以表示为5(,2)(,2),444444ππππππππ+-或或(-)等多种形式,其中,只有(,)44ππ的极坐标满足方程ρθ=. 二、参数方程 1.参数方程的概念一般地,在平面直角坐标系中,如果曲线上任意一点的坐标,x y 都是某个变数t 的函数()()x f t y g t =⎧⎨=⎩①,并且对于t 的每一个允许值,由方程组①所确定的点(,)M x y 都在这条曲线上,那么方程①就叫做这条曲线的参数方程,联系变数,x y 的变数t 叫做参变数,简称参数,相对于参数方程而言,直接给出点的坐标间关系的方程叫做普通方程. 2.参数方程和普通方程的互化(1)曲线的参数方程和普通方程是曲线方程的不同形式,一般地可以通过消去参数而从参数方程得到普通方程.(2)如果知道变数,x y 中的一个与参数t 的关系,例如()x f t =,把它代入普通方程,求出另一个变数与参数的关系()y g t =,那么()()x f t y g t =⎧⎨=⎩就是曲线的参数方程,在参数方程与普通方程的互化中,必须使,x y 的取值范围保持一致.注:普通方程化为参数方程,参数方程的形式不一定唯一。
选修4 4坐标系与参数方程知识点总结及同步练习(附答案) 副本
选修4 4坐标系与参数方程知识点总结及同步练习(附答案) 副本选修4-4坐标系与参数方程知识点总结及同步练习(附答案)-副本黄冈教育老师:赵英雄学生:坐标系和参数方程知识点1.平面直角坐标系中的坐标伸缩变换十、X设定点P(X,y)是平面直角坐标系中的任意点??Y在Y(±10)(±0)的作用下p(x,y)对应到点p?(x?,y?),称?为平面直角坐标系中的坐标伸缩变换,简称伸缩变换.2.极坐标系的概念(1)极坐标系如图所示,在平面上取一个固定点O,称为极点,从极点O上画一条射线,叫做极轴;再选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系.注:极坐标系以角度的平面图形为几何背景,而平面直角坐标系以相互垂直的两个数轴为几何背景;在平面直角坐标系中,点和坐标之间可以建立一对一的对应关系,但在极坐标系中不能建立,但极坐标系和平面直角坐标系是平面坐标系(2)极坐标设m是平面内一点,极点o与点m的距离|om|叫做点m的极径,记为?;以极轴ox为始边,射线om为终边的角?xom叫做点m的极角,记为?.有序数对(?,?)叫做点m的极坐标,记作m(?,?).一般来说,如果没有特别说明,我们认为??0可以取任何实数特别地,当点m在极点时,它的极坐标为(0,?)(?∈r).和直角坐标不同,平面内一个点的极坐标有无数种表示.如果指定??0,0 2.然后,除了极点,平面中的点可以使用唯一的极坐标(?,)表示同时,极坐标(?,)所代表的点也是唯一确定的。
3极坐标和直角坐标的相互转换(1)互化背景:把直角坐标系的原点作为极点,x轴的正半轴作为极轴,并在两种坐标系中取相同的长度单位,如图所示:黄刚教育老师:赵英雄学生:(2)互化公式:设m是坐标平面内任意一点,它的直角坐标是(x,y),极坐标是(?,?) (??0),所以极坐标和直角坐标的相互公式如下表所示:点m直角坐标(x,y)极坐标(?,?)互化公式?x??cos??y??sin2?x2?y2ytan??(x?0)x在一般情况下,由tan?确定角时,可根据点m所在的象限最小正角.4.常见曲线的极坐标方程曲线图形极坐标方程圆心在极点,半径为r的圆圆心为(r,0),半径为r的圆圆心为(r,??r(02?)??2rcos?(??2?2)?2),半?2rsin?(0)径为r的圆(1)过极点,倾斜角为(??r)或(??r)(2)???(??0)和(??0)?的直线薛尔同黄刚教育老师:赵英雄学生:通过点(a,0),一条垂直于极轴的直线?余弦??A(?2?)交叉点(A,?2)和杆?罪a(0??)轴线平行的直线注:由于平面上点的极坐标的表示形式不唯一,即(?,?), (?,2), (??,), (??,?), 它们都表示同一点的坐标,这与该点的直角坐标不同唯一性明显不同.所以对于曲线上的点的极坐标的多种表示形式,只要求至少有一个能满足极坐标方程即可.例如对于极坐标方程,点m(??,)可以表示为445???(,?2?)或(,?2?)或(-,)等多种形式,其中,只有(,)的极坐标满足方4444过程2、参数方程1参数方程的概念一般地,在平面直角坐标系中,如果曲线上任意一点的坐标x,y都是某个变数t的函数十、F(T)①, 对于T的每个容许值,由方程组确定的点m(x,y)① 在这条曲线上吗,??YG(T)然后方程① 被称为该曲线的参数方程,连接变量X和Y的变量t被称为参数变量,被称为参数。
(完整)高中数学选修4—4(坐标系与参数方程)知识点总结,推荐文档
坐标系与参数方程 知识点1.平面直角坐标系中的坐标伸缩变换设点P(x,y)是平面直角坐标系中的任意一点,在变换的作用下,点P(x,y)对应到点,称为平面直角坐标系中的坐标(0):(0)x x y yλλϕμμ'=>⎧⎨'=>⎩A A (,)P x y '''ϕ伸缩变换,简称伸缩变换.2.极坐标系的概念(1)极坐标系如图所示,在平面内取一个定点,叫做极点,自极点引一条射线,叫做极轴;再选定一个长度单位,一个角度单位(通常取弧度)及其正O O Ox 方向(通常取逆时针方向),这样就建立了一个极坐标系.注:极坐标系以角这一平面图形为几何背景,而平面直角坐标系以互相垂直的两条数轴为几何背景;平面直角坐标系内的点与坐标能建立一一对应的关系,而极坐标系则不可.但极坐标系和平面直角坐标系都是平面坐标系.(2)极坐标:设M 是平面内一点,极点与点M 的距离|OM|叫做点M 的极径,记为;以极轴为始边,射线为终边的角叫做点M 的极角,记O ρOx OM xOM ∠为.有序数对叫做点M 的极坐标,记作.θ(,)ρθ(,)M ρθ一般地,不作特殊说明时,我们认为可取任意实数.0,ρ≥θ特别地,当点在极点时,它的极坐标为(0, )(∈R).和直角坐标不同,平面内一个点的极坐标有无数种表示.M θθ如果规定,那么除极点外,平面内的点可用唯一的极坐标表示;同时,极坐标表示的点也是唯一确定的.0,02ρθπ>≤<(,)ρθ(,)ρθ3.极坐标和直角坐标的互化(1)互化背景:把直角坐标系的原点作为极点,x 轴的正半轴作为极轴,并在两种坐标系中取相同的长度单位,如图所示:(2)互化公式:设是坐标平面内任意一点,它的直角坐标是,极坐标是(),于是极坐标与直角坐标的互化公式如表:M (,)x y (,)ρθ0ρ≥点M 直角坐标(,)x y 极坐标(,)ρθ互化公式cos sin x y ρθρθ=⎧⎨=⎩222tan (0)x y y x xρθ=+=≠在一般情况下,由确定角时,可根据点所在的象限最小正角.tan θM 4.常见曲线的极坐标方程曲线图形极坐标方程圆心在极点,半径为的圆r (02)r ρθπ=≤<圆心为,半径(,0)r 为的圆r 2cos ()22r ππρθθ=-≤<圆心为,半(,)2r π径为的圆r 2sin (0)r ρθθπ≤<过极点,倾斜角为的直线α(1)()()R R θαρθπαρ=∈=+∈或(2)(0)(0)θαρθπαρ=≥=+≥和过点,与极轴(,0)a 垂直的直线cos ()22a ππρθθ=-<<过点,与极(,)2a π轴平行的直线sin (0)a ρθθπ=<<注:由于平面上点的极坐标的表示形式不唯一,即都表示同一点的坐标,这与点的直角坐标的唯一性明(,),(,2),(,),(,),ρθρπθρπθρπθ+-+--+显不同.所以对于曲线上的点的极坐标的多种表示形式,只要求至少有一个能满足极坐标方程即可.例如对于极坐标方程点可以表示为,ρθ=(,)44M ππ等多种形式,其中,只有的极坐标满足方程.5(,2)(,2),444444ππππππππ+-或或(-)(,)44ππρθ=二、参数方程1.参数方程的概念一般地,在平面直角坐标系中,如果曲线上任意一点的坐标都是某个变数的函数①,并且对于的每一个允许值,由方程组①所确定的,x y t ()()x f t y g t =⎧⎨=⎩t 点都在这条曲线上,那么方程①就叫做这条曲线的参数方程,联系变数的变数叫做参变数,简称参数,相对于参数方程而言,直接给出点的坐(,)M x y ,x y t 标间关系的方程叫做普通方程.2.参数方程和普通方程的互化(1)曲线的参数方程和普通方程是曲线方程的不同形式,一般地可以通过消去参数而从参数方程得到普通方程.(2)如果知道变数中的一个与参数的关系,例如,把它代入普通方程,求出另一个变数与参数的关系,那么就是曲线,x y t ()x f t =()y g t =()()x f t y g t =⎧⎨=⎩的参数方程,在参数方程与普通方程的互化中,必须使的取值范围保持一致.,x y 注:普通方程化为参数方程,参数方程的形式不一定唯一。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数方程为
x y
x0 y0
t cos t sin
(t为参数) ,其中 t 表示直线 l 上以定点 M 0 为起点,任一点
uuuuuur M (x, y) 为终点的有向线段 M 0M 的数量,当点 M 在 M 0 上方时, t >0;当点 M 在
M 0 下方时, t <0;当点 M 与 M 0 重合时, t =0。我们也可以把参数 t 理解为以 M 0 为原 点,直线 l 向上的方向为正方向的数轴上的点 M 的坐标,其单位长度与原直角坐标系中的
x2 a2
y2 b2
1(a
0,
b
0),
其参数方程为
x y
a b
sec tan
(为参数)
,其中
[0, 2 )且 , 3 . 22
焦点在
y
轴上的双曲线的标准方程是
y2 a2
x2 b2
1(a
0,b
0), 其参数方 y 的取值范围;
(2)若 x y a 0 恒成立,求实数 a 的取值范围。
2.求直线
l1
:
x y
1 5
t
3t (t为参数) 和直线 l2 : x y 2
3 0 的交点 P 的坐标,及点
P
与 Q(1, 5) 的距离。
3.在椭圆 x2 y2 1上找一点,使这一点到直线 x 2 y 12 0 的距离的最小值。 16 12
点M
直角坐标 (x, y)
极坐标 (, )
互化公式
x cos
y
sin
2 x2 y2 tan y (x 0)
x
在一般情况下,由 tan 确定角时,可根据点 M 所在的象限最小正角.
4.常见曲线的极坐标方程
曲线
图形
极坐标方程
圆心在极点,半径
为 r 的圆
单位长度相同。
Word 格式
.
.
选修 4-4
数学选修 4-4 坐标系与参数方程 [基础训练 A 组] 数学选修 4-4 坐标系与参数方程 [综合训练 B 组] 数学选修 4-4 坐标系与参数方程 [提高训练 C 组]
数学选修 4-4 坐标系与参数方程
[基础训练 A 组]
一、选择题
x 1 2t
t
1 t
(t为参数)
表示的曲线是(
)
y 2
A.一条直线 B.两条直线 C.一条射线 D.两条射线
x
1
1 2
t
3.直线
(t为参数) 和圆 x2 y2 16 交于 A, B 两点,
y
3
3
3t 2
则 AB 的中点坐标为( )
A. (3, 3) B. ( 3,3) C. ( 3, 3) D. (3, 3)
同时,极坐标 (, ) 表示的点也是唯一确定的.
3.极坐标和直角坐标的互化 (1)互化背景:把直角坐标系的原点作为极点,x 轴的正半轴作为极轴,并在两种坐标系
Word 格式
.
.
中取相同的长度单位,如图所示:
(2)互化公式:设 M 是坐标平面内任意一点,它的直角坐标是 (x, y) ,极坐标是 (, ) ( 0 ),于是极坐标与直角坐标的互化公式如表:
唯一性明显不同.所以对于曲线上的点的极坐标的多种表示形式,只要求至少有一个能满足
极坐标方程即可.例如对于极坐标方程
,
点
M
(
,
)
可以表示为
44
(
,
2
)或(或 (,-
2 ))
44
44
5
, 等多种形式,其中,只有 ( , ) 的极坐标满足方
44
44
程 .
点的旋转角 区分开来,除了在四个顶点处,离心角和旋转角数值可相等外(即在 0 到 2 的范围内),在其他任何一点,两个角的数值都不相等。但当 0 时,相应地也
2 有 0 ,在其他象限内类似。
2
5.双曲线的参数方程
Word 格式
.
.
以坐标原点 O 为中心,焦点在 x 轴上的双曲线的标准议程为
Word 格式
.
.
数学选修 4-4 坐标系与参数方程
[综合训练 B 组]
一、选择题
x a t
1.直线
l
的参数方程为
y
b
t
(t为参数)
,
l
上的点
P1
对应的参数是
t1
,则点
P1
与
P(a, b) 之间的距离是( )
A. t1
B. 2 t1
C. 2 t1
2 D. 2 t1
2.参数方程为
x
3
3
3
3
6.极坐标方程 cos 2sin 2 表示的曲线为( )
A.一条射线和一个圆 B.两条直线 C.一条直线和一个圆 D.一个圆
Word 格式
.
.
二、填空题
x 3 4t
1.直线
y
4
5t
(t为参数)
的斜率为______________________。
2.参数方程
A. x2 y2 0或y 1 B. x 1 C. x2 y2 0或x 1 D. y 1
5.点 M 的直角坐标是 (1, 3) ,则点 M 的极坐标为( )
A. (2, )
B. (2, )
C. (2, 2 )
D. (2, 2k ), (k Z )
它的参数方程为:
x
y
a b
r r
cos sin
(
为参数)
。
4.椭圆的参数方程
以坐标原点 O 为中心,焦点在 x 轴上的椭圆的标准方程为 x2 y2 1(a b 0), 其 a2 b2
参数方程为
x
y
a b
cos sin
(为参数)
,其中参数
4.直线
x
y
2 1t 2
1 1 2
t
(t为参数)
被圆
x2
y2
4
截得的弦长为______________。
5.直线 x cos y sin 0 的极坐标方程为____________________。
三、解答题
1.已知点 P(x, y) 是圆 x2 y2 2 y 上的动点,
为几何背景;平面直角坐标系内的点与坐标能建立一一对应的关系,而极坐标系则不可.但极
坐标系和平面直角坐标系都是平面坐标系.
(2)极坐标
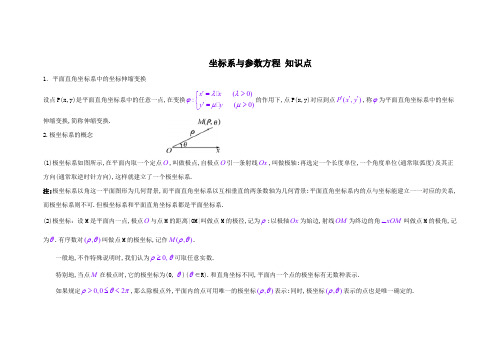
设 M 是平面内一点,极点 O 与点 M 的距离|OM|叫做点 M 的极径,记为 ;以极轴 Ox 为始
边,射线 OM 为终边的角 xOM 叫做点 M 的极角,记为 .有序数对 (, ) 叫做点 M 的极坐
同。
3.圆的参数
如图所示,设圆 O 的半径为 r ,点 M 从初始位置 M 0 出发,按逆时针方向在圆 O 上作
匀速圆周运动,设
M
(
x,
y)
,则
x
y
r r
cos sin
(为参数)
。
这就是圆心在原点 O ,半径为 r 的圆的参数方程,其中 的几何意义是 OM 0 转过的角
度。
圆心为 (a, b) ,半径为 r 的圆的普通方程是 (x a)2 ( y b)2 r2 ,
2.极坐标系的概念 (1)极坐标系
如图所示
,在平面内取一个定点 O ,叫做极点,自极点 O 引一条射
线 Ox ,叫做极轴;再选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆
时针方向),这样就建立了一个极坐标系.
注:极坐标系以角这一平面图形为几何背景,而平面直角坐标系以互相垂直的两条数轴
圆心为 (r, 0) ,半径 为 r 的圆
圆心为 (r, ) ,半
2 径为 r 的圆
过极点,倾斜角为
的直线
r(0 2 )
2r cos ( )
2
2
2r sin (0 )
(1) ( R)或 ( R) (2) ( 0)和 ( 0)
1.若直线的参数方程为
y
2
3t
(t为参数)
,则直线的斜率为(
)
2
A.
3 3
C.
2
B. 2 3
D. 3 2
2.下列在曲线
x
y
sin 2 cos
sin
(为参数)
上的点是(
)
A. (1 , 2) B. ( 3 , 1) C. (2, 3) D. (1, 3)
2
42
3.将参数方程
x y
2 sin2 sin2
(为参数)
化为普通方程为(
)
A. y x 2 B. y x 2 C. y x 2(2 x 3) D. y x 2(0 y 1)
4.化极坐标方程 2 cos 0 为直角坐标方程为( )
参数方程而言,直接给出点的坐标间关系的方程叫做普通方程.