一类约束满足问题及其算法
约束满足问题及其求解方法研究

约束满足问题及其求解方法研究随着现代科技的快速发展,人们对各种求解问题的需求日益增长,其中,约束满足问题是一个相对独特却又十分重要的问题类型。
在此,我们将从定义、特点、应用以及求解方法几个方面谈一谈约束满足问题及其求解方法的相关内容。
一、定义约束满足问题(Constraint Satisfaction Problem,CSP)是指在一定约束条件下,满足对变量的限制(约束条件)的数学问题。
因此,CSP可以被定义为一个元组(X,D,C):X 表示所有的变量集合,D 表示每个变量 x ∈ X 的定义域,C 表示x∈X 的约束集合。
二、特点CSP问题通常具有以下几个特点:1、通用性强:CSP问题可以用于描述各种类型的问题,如图着色和行程问题等。
2、规模大:CSP问题通常涉及到大量的变量和约束,其求解过程相对复杂,因此,系统的设计和求解方法是至关重要的。
3、复杂度高:大多数CSP问题属于NP完全问题,无法在多项式时间内精确地解决,同时,这些问题的求解方法也比较困难。
三、应用CSP的应用非常广泛,以下是其中几个代表性的应用领域。
1、人工智能:CSP可以用于优化问题、机器学习、计算机视觉等人工智能任务。
2、排程问题:CSP可以用于作业坊调度、员工排班等任务中。
3、生产问题:CSP可以用于零件生产、工厂排布等任务中。
4、电子设计自动化:CSP可以用于电路自动布局、芯片设计等任务中。
四、求解方法针对CSP问题的复杂性,目前有多种求解方法,这里简要介绍几种主流的方法。
1、基于启发式算法的方法:启发式算法通常针对CSP问题中的子问题进行求解,能够得到比较好的求解结果,但是求解时间可能较长。
2、基于局部搜索的方法:局部搜索算法的优点在于其求解速度较快,但其无法得到全局最优解,可能只能得到局部最优解。
3、基于约束传播的方法:约束传播算法利用限制传播的策略进行求解,能够得到可行解或确定无解,但是在求解大规模问题方面表现相对不足。
5.约束满足问题
– 从Xi向前是无解的 / 从Xi回到某个以前的变量 赋值
– 例如:赋值顺序是WA-NSW-NT-Q-SA(发生错
误)
28
– 每个变量都有一个非空可能值域Di – 每个约束指定了包含若干变量的一
个子集内各变量的赋值范围
• CSP的一个状态—对一些或全部变量的赋值 {Xi=vi, Xj=vj, …}
3
CSP问题的解
• 一个不违反任何约束的对变量的赋值称 为相容赋值或合法赋值
• 对每个变量都进行赋值称为完全赋值 • 一个(一组)既是相容赋值又是完全赋值的
– 考虑U有进位:R={0,2,4,6,8} O={5,……} R=0/O=5(有进位)/T=7/W=6/U=3 解={1530 | 765}
8
例2:密码算术问题(2)
• 四列算式约束
– O+O=R+10*X1
– X1+W+W=U+10*X2
– X2+T+T=O+10*X3
– X3=F
• 对应的约束超图如右
– 当到达Y时,可知回溯到哪个变量
26
后向跳转
• 回溯检验导致失败的变量的赋值—后向 跳转:回溯到冲突集中时间最近(最后赋 值)的变量
• 每个被后向跳转剪枝的分支在前向检验 算法中也被剪枝—简单的后向跳转在前 向检验(弧相容性检验)搜索中是多余的
• 因为都是做取值相容的检测,只要在弧 相容检验时增加一个变量集合记录即可
–当前变量的赋值会对其他未赋值变量产生什 么约束?怎样利用这种约束以提高效率?
–当遇到某个失败的变量赋值时,怎样避免同 样的失败?就是说找到对这种失败起到关键 作用的某个变量赋值
18
《人工智能原理》-PPT P2C6-约束问题求解

❖ 一致性赋值:不违反任何约束的合法赋值。
❖ 完备性赋值:每个变量都被赋值,并且该赋值是一致的、完整的。
人工智能原理
15
约束满足问题
形式化
约束满足问题的值域
值域
离散
连续
有限
地图着色问题(Map coloring problem)
无
无限
整数或字符串集合(Set of integers or strings)
约束满足问题的实例化
约束传播
回溯搜索
局部搜索
问题的改进
13
约束满足问题
约束满足问题(Constraint Satisfaction Problems, CSPs)
一个约束满足问题可看作是一个可能世界中的一组对象(objects),其状态必须满足一些约
束。它将一个可能世界表征为一个对变量进行有限约束的同构集合,采用约束满足方法进行求
无
约束满足问题的约束
约束
一元约束
二元约束
n元约束
线性
, ≠ 3
1 , 2 , 1 ≠ 2
(1 , 2 , … , ), ∀≠ (1 , 2 , … , )
非线性
人工智能原理
算法不存在
16
约束满足问题
状态的表示
状态表示:约束满足问题 vs 经典搜索问题
❖ 经典搜索问题的状态:
局部搜索(local search)
人工智能原理
18
第6章 约束问题求解
目录
人工智能原理
约束问题
可能世界及其约束
约束满足问题
(运筹学与控制论专业优秀论文)一类最优化问题的算法设计

知识水坝为您提供优质论文
承诺书
本人郑重声明:所呈交的学位论文,是本人在导师指导下,独立 进行研究工作所取得的成果。尽我所知,除文中已经注明引用的内容 外,本学位论文的研究成果不包含任何他人享有著作权的内容。对本 论文所涉及的研究工作做出贡献的其他个人和集体,均已在文中以明 确方式标明。
本人授权南京航空航天大学可以有权保留送交论文的复印件,允 许论文被查阅和借阅,可以将学位论文的全部或部分内容编入有关数 据库进行检索,可以采用影印、缩印或其他复制手段保存论文。
1.3 本文的主要内容
本文主要研究一类具有特殊形式的最优化问题,求解这一类最优化问题的全 局最优解,并应用到求解互补问题上。虽然目前已经有很多算法,但是我们考虑 到本最优化问题的约束条件是特殊的,因此可以利用约束条件的特殊性构造更为 简单有效的算法。
本文提出了一类新的函数,将它定义为半正定函数。利用这类函数将原问题; 分别转化为无约束最优化和含等式约束的最优化问,并分别设计了算法,进行了 数值实验,验证了算法的有效性。为了给出问题的全局最优解,我们又研究了算 法子问题的全局最优化算法,利用填充函数法来求解子问题。这样就保证了前面 设计的算法可以求得问题的全局最优解。最后,针对约束最优化问题(P),提出 了拟填充函数的概念,构造了一类拟填充函数并设计了算法。具体内容如下:
In this article we propose a new type of function, which is called a semi-positive function. We use this function to make another function, then we can turn the original problem into another one. We give algorithms and numerical results. Then we investigate the sub-problem. Also we propose the definition of quasi-filled function. We propose a quasi-filled function and design algorithm. It mainly contains the following six chapters:
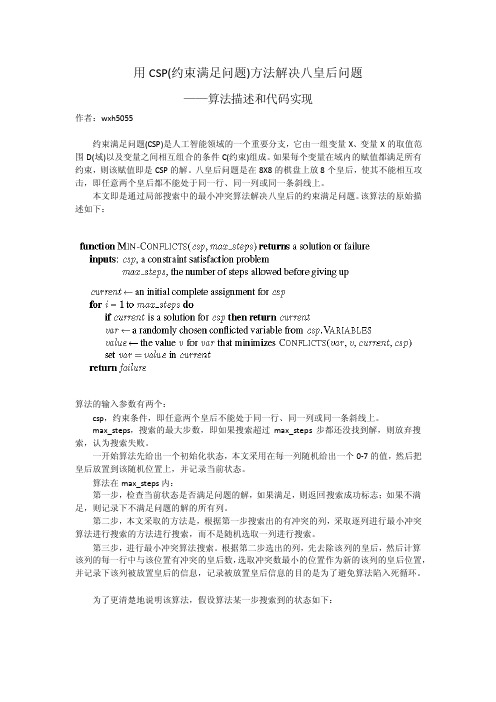
用CSP(约束满足问题)方法解决八皇后问题
conflictNum++; } } //检查同一列是否有冲突 j=column; for(i=0;i<N;i++) { if((i!=row)&&(queenBoard[i][j]==QUEEN)) {
//如果同一列其它位置有皇后,记录冲突点数 conflictNum++; } } //检查'\'斜线是否有冲突 if(row>column) { i=row-column; j=0; } else { i=0; j=column-row; } for(;(i<N)&&(j<N);i++,j++ ) { if((i!=row)&&(queenBoard[i][j]==QUEEN)) { //如果'\'斜线其它位置有皇后,记录冲突点数 conflictNum++; } } //检查'/'斜线是否有冲突 if((row+column)<N) { i=row+column; j=0; } else { i=N-1; j=row+column-N+1; } for(;(i>=0)&&(j<=N);i --,j++)
该列的每一行中与该位置有冲突的皇后数,选取冲突数最小的位置作为新的该列的皇后位置, 并记录下该列被放置皇后的信息,记录被放置皇后信息的目的是为了避免算法陷入死循环。
为了更清楚地说明该算法,假设算法某一步搜索到的状态如下:
此时按照最小冲突算法,第二列、第六列、第七列和第八列的皇后 有冲突,则当计算第六列 的每一行的与该位置有冲突的皇后数时,结果如下:
sat 问题 方法

SAT 问题方法
SAT问题是一种组合优化问题,旨在找到满足一组布尔表达式中至少一个的变星赋值。
解决SAT问题的方法有很多种,以下是一些常见的方法:
1.回溯法:回溯法是一种通过穷举所有可能的赋值来找到满足布尔表达式的解的方法。
这种方法简单直观,但当变量规模较大时,效率较低。
2.约束满足问题方法:约束满足问题方法是一种基于约束满足的算法,它通过不断添加约束来缩小解空间,直到找到满足所有布尔表达式的解或确定无解。
这种方法在处理具有大量约束的SAT问题时非常有效。
3.造传算法:造传算法是一种基于生物进化原理的优化算法。
它通过选择、交叉和变异等操作来不断进化解空间,最终找到满足布尔表达式的解。
这种方法在处理大规模的SAT问题时具有一定的优势。
4. DPLL算法: DPLL算法是一种经典的解决SAT问题的算法。
它通过深度优先搜索和动态规划来找到满足布尔表达式的解。
DPLL算法在处理具有较大规模变星的SAT问题时具有较高的效率。
5.基于概率的方法:基于概率的方法是一种通过随机采样来找到满足布尔表达式的解的方法。
这种方法在处理大规模的SAT问题时具有一定的优势,但结果的可靠性较低。
以上是解决SAT问题的一些常见方法,选择哪种方法取决于问题的具体性质和规模。
在实际应用中,通常会根据问题的具体情况选择最适
合的方法来解决SAT问题。
制定:审核:批准:。
约束满足问题(CSP)的算法探索

约束满足问题(CSP)的算法探索约束满足问题(Constraint Satisfaction Problem,CSP)是人工智能领域中的一个重要问题类型,涉及到在一组变量上的取值,同时满足一系列约束条件。
CSP在实际生活中有着广泛的应用,比如在排课、时间表安排、资源分配等领域都可以看到CSP的身影。
为了解决CSP问题,人们提出了各种不同的算法,本文将对CSP问题及其相关算法进行探索和介绍。
### 什么是约束满足问题(CSP)?约束满足问题是指一组变量,每个变量有一定的取值范围,同时还有一系列约束条件限制这些变量的取值。
CSP的目标是找到一组取值,使得所有约束条件都得到满足。
通常来说,CSP可以用一个三元组表示:CSP = (X, D, C),其中:- X = {X1, X2, ..., Xn} 表示一组变量;- D = {D1, D2, ..., Dn} 表示每个变量对应的取值范围;- C = {C1, C2, ..., Cm} 表示约束条件的集合。
### CSP的经典问题CSP问题有许多经典的应用场景,下面介绍几个常见的CSP问题:1. **地图着色问题**:给定一张地图和一定数量的颜色,要求每个地区用一种颜色着色,相邻的地区不能使用相同的颜色。
2. **八皇后问题**:在8×8的国际象棋棋盘上放置8个皇后,使得它们互相不能攻击到对方。
3. **数独问题**:填充一个9×9的网格,使得每一行、每一列和每个3×3的子网格中的数字都是1到9且不重复。
### CSP的求解算法为了解决CSP问题,人们提出了多种求解算法,常见的包括回溯算法、约束传播算法和启发式搜索算法等。
下面分别介绍这几种算法: #### 1. 回溯算法回溯算法是解决CSP问题最常用的方法之一。
其基本思想是逐步尝试每个变量的取值,并检查是否满足约束条件,如果不满足则回溯到上一步重新选择取值。
回溯算法的优点是简单易懂,但在处理大规模问题时效率较低。
约束满足问题中一致性算法的分析与研究

A s at bt c r
C nt it as co rbe s C P aebe l i rt tsbetn At c lIt lec . h r aet e e ost o sa tf t nPo l ( S )hv ena mp a ujc i rf i ne i ne T e r rem t d r n S ia i m l on i a i lg e h h o
到满足 , 如果对于任意 的第 K个 节点 , 至少存 在一 个值 使得 其 所有 的 K个节点之 间的约束都得 到满足 , 则可 以说这个 约束 图
是 K一致 性的。如果对 于所 有的 ≤ 都 有 一致 性存在 , , 也
就是说 , 对于 阶数小 于 K或等 于 K的一致性 条件 , 约束 图都 满
为 了更好地 说明现存 的几 种主要 的一致性算 法 , 定义 如下 符号 : 约束 图为 G, 变量 i 的值域 为 D , P 为变量 i 和 之间的约 束 。设变量 数为 n 。主要 的弧一 致性 算法 为七 种 : A - 从 C 1到 A -。其 中较为常用 的是 A - A - 。弧一致性算 法的核心 C7 C3和 C- 4 内容就是 : 如果 一个节 点 的某一取 值不 能得 到相邻 节点 ( 即有 约束关系存在的节点 ) 中至少 一个取 值 的支持 ( 即使得约束 得 到满足 ) 则该值将被从该节点的值域 中删除 。 ,
维普资讯
第2 4卷 第 8期 20 0 7年 8月
计 算机应 用 与软件
Co mpu e p i ainsa d S fwa e trAp lc to n ot r
Vo. 4 No 8 12 . Au 2 0 g. 0 7
约 束 满足 问题 中一 致 性 算 法 的分 析 与 研 究
一种求解加权约束满足问题的RCGA算法
GA c a n ma k e t h e a d v a n t a g e o f p a r e n t i n h e r i t t O t h e n e x t g e n e r a t i o n b e t t e r ,a n d t h e c o n v e r g e n c e r a t e t o wa r d t h e o p t i ma l s o l u —
第 3 5卷
第 1 期
桂 林 电 子 科 技 大 学 学 报
J o u r n a l o f Gu i l i n Un i v e r s i t y o f El e c t r o n i c Te c h n o l o g y
2 0 1 5年 2月
VoI .3 5, NO .1 Fe b. 201 5
一
种 求 解 加 权 约 束 满 足 问题 的 RC GA 算 法
刘 文 庆 , 古天 龙。 , 徐 周 波
( 1 . 桂 林 电子 科 技 大 学 电 子 工 程 与 自动 化 学 院 , 广 西 桂 林 5 4 1 0 0 4 ;
2 . 桂 林 电子 科 技 大 学 计 算机 科 学 与 工程 学 院 , 广西 桂林 5 4 1 0 0 4 )
Ab s t r a c t : Ai mi n g a t t he s l ow c o n ve r ge n c e an d t he p oo r s e ar c h c a pa b i l i t i e s w he n s ol vi ng W CSP wi t h GA ,a ne w a l g or i t hm RCGA i s p r o po s e d f o r s o l v i n g W CSP. The c o ns t r a i n t gr a ph o f W CSP i s di vi de d i nt o s e ve r a l mi ni m um c o r r e l a t i o n su b — g r a p hs wi t h t he gr a ph pa r t i t i on t e c hn ol o gy,a nd t he va r i ab l e s e q ue n c e i s c ha n ge d f o r e nc odi ng,W CSP c o s t f u nc t i on i s us e d t o de s i g n t he f i t ne s s f un c t i on,r o ul e t t e s e l e c t i on me t ho d i s us e d t o f i l t e r t he who l e po pu l a t i on.T h e e x pe r i me nt a l r e s ul t s s h ow t ha t RC
约束满足问题求解的符号OBDD技术

wh r st en mb ro a ibe nt eC P Th n te“ eeni h u e f ra lsi h S . v e h AND”o ea ino DD Su e OC non al U - r b p rto f0B i sd t O jiቤተ መጻሕፍቲ ባይዱ lS bp o —
Xu Z o b h u o,Gu Tin o g a ln
( c o l f mp t rS in ea d E g n e ig S h o o Co u e c c n n ie rn ,Gul ie s yo e to i Te h oo y e in Un v ri f i t Elcr n c c n lg ,Gul 4 0 4 i n 5 1 0 ,Chn ) i ia
b l l o ih i mo ee f in h n b c e l n t n ag rt m n ie tag rt m a e n OB o i a g rt m s c r fi e tt a u k tei a i l o i c mi o h a d d r c l o i h b s d o DD.
Ab ta t Co s r i ts t f c i n p o l m ( P)i a mp ra tr s a c r n h i r i ca n el e c .I h a sr c : n tan a i a t r b e s o CS s n i o t n e e r h b a c n a t iili t l g n e n t e p — f i pr e ,CS s f r ua e y o d r d b n r e ii n d a r m ( P i o m l td b r e e i a y d cso ig a 0BDD) n h y ,a d t es mb l o i 0BDD l o i m o P i c ag rt h f rCS s p o o e .Ba e n t e s mb l rp sd s d o h y o i OBDD o mu a i n o S c f r lt fC P,a lt e v ra ls i h SP a e o d r d i n r a ig o l h a ib e n t e C r r e e n i c e sn o d r b t e r e i h o s r i tg a h r e y i d g e n t e c n t an r p .W i h s v ra l o d r h P i d c m p s d i t s b p o l ms s t t i a i b e r e ,t e CS s e o o e n o h u - r be ,
高校排课问题的约束满足优化模型与算法
高校排课问题的约束满足优化模型与算法(北京大学医学部公共教学部中国北京100191)【摘要】高校排课问题对于教学计划正常进行具有重要意义。
由于高校具有多学院、多教学楼、多排课需求的特点,此问题同时存在硬性约束和柔性约束,具有NP-难的复杂性。
本文将高校排课问题映射为约束满足优化问题并建立了约束满足模型;通过对问题特征的分析,基于约束满足技术设计了求解算法。
【关键词】排课问题;约束满足技术;问题建模;算法Constraint Satisfaction Optimization Model and Algorithm for Course Scheduling Problem【Abstract】Course scheduling problem plays an important role in implementing teaching plan. Due to the characters with multi-school, multi-building and multi-demand, both hard and soft constraints exist in the problem. In this paper, the course scheduling problem is mapped to a constraint satisfaction optimization problem, and a constraint satisfaction model is built. With the analysis of the problem, an algorithm is designed based on the constraint satisfaction technique.【Key words】Course scheduling problem; Constraint satisfaction technique; Modeling; Algorithm0引言随着高校规模的不断扩大、专业的不断扩充、以及教学设施的不断完善,教务管理工作的难度逐年加大,作为教务管理关键工作之一的课程编排问题也成为了当前教务人员所面临的复杂问题。
约束满足问题求解及ILOGSOLVER系统简介

2002 年1 月N o . 1吉林大学学报(理学版)JO URN A L OF J I L I N U NI VERSITY ( S CIEN CE EDITI O N)第1 期2002201约束满足问题求解及I LO G SO LVER姜英新, 孙吉贵(吉林大学计算机科学与技术学院, 长春130012)系统简介提要: 首先综述求解约束满足问题的基本算法和搜索策略, 然后介绍I LO G SOLVER 求解系统提供的类和函数的基本组成, 并给出用该系统求解的两个地图着色示例.关键词: 约束满足问题; 约束求解; 搜索策略文章编号: 167125489 (2002) 0120053208 中图分类号: TP31文献标识码: A约束满足问题( C onstraint Satisfacti on Problem , CSP) 的应用面很广, 如调度中的资源分配问题、N 皇后问题、地图着色问题等. 使用约束满足的方法来求解问题是将该问题用一组变量和一组约束来表示.然后在满足所有约束的条件下给每个变量赋值, 如果最终每个变量都至少被赋了1 个值, 则说明这个问题可解; 否则, 说明该问题不可解.本文研究的约束满足问题指有限的约束满足问题. 在有些问题中, 变量可以有无限的域, 或者变量的集合可以根据其中一个变量取值的不同而动态改变. 通常认为, 在问题求解时加入特殊的领域知识可得到更好的效率. 例如, 在仔细地分析了N 皇后问题后, 人们可以得到一个解决它的非常有效的方法 1 ,2. 然而, 研究一般的算法更为重要.本文着重介绍求解约束满足问题的基本算法和搜索策略.1求解CSP 的基本搜索策略1. 1 普通搜索算法在约束满足问题中, 普通的搜索策略在求解问题时没有用到约束可以传播这一性质. 然而, 由于搜索空间的特性, 普通的搜索策略 3 可能比其它的方法更适用.BT 算法(回溯算法) : 其基本思想是每次给1 个变量赋1 个其论域中的任意值, 然后检查这个变量的值与前面变量被赋值的相容性. 如果不相容, 则该变量的值被从论域中删除并给这个变量赋另一个值, 继续测试与其它变量值的相容性, 重复该过程, 直到这个变量被赋的值与前面所有变量的值都相容或者这个变量的值都被测试完毕且均不相容为止. 若结果是后者, 则把该变量的前一个变量先前被赋的值删除, 并给其重新赋一个值, 这个动作称为回溯, 重复这个过程, 直到所有的变量都被赋值或不能再回溯(如, 第一个变量的所有值都被拒绝) 为止. 后者表示这个约束满足问题无解. 回溯搜索算法是人工智能一个基本的搜索算法, 这里不再给出算法的具体描述和操作实例 4 .在BT 算法中, 并没有尝试删除搜索空间的任何部分. 它是一个穷举搜索策略, 并且是完全的( 问题的所有解都能找到) 和可靠的(算法找到的所有解都能满足所有的约束) .I B (iterative broadening) 算法 5 : 该算法基本上是带一个宽度切割门限值b 的深度优先搜索算法. 设b 为当前的门限值, 如果搜索树中一个节点(变量) 被访问了b 次( 包括第一次被访问和回溯) , 则其下面的未被访问的子节点可忽略. 如果在当前的门限值下没有发现解, 则门限值逐步增加. 如果发现解或者门限b 的值大于等于搜索树中最大的分支数, 算法终止.收稿日期: 2001204220 .作者简介: 姜英新(1977~) , 女, 硕士研究生. 联系人: 孙吉贵(1962~) , 男, 教授, 博士生导师.基金项目: 国家自然科学基金(批准号: 60073039) 、教育部骨干教师基金和吉林省自然科学基金(批准号: 2000540) .1. 2 预测策略预测算法的基本策略: 一次只给1 个变量赋值, 为了减少搜索空间和检测不可满足性, 在每一步都化简问题.FC (forward checking) 算法(前向检查算法) : 该算法的过程基本和BT 算法相同, 除要求每个未被赋值的变量的论域中都至少有1 个值外, 这些值和所有被赋值的变量的值都相容. 为保证这点, 每次给1个变量赋值时, FC 算法均从未被赋值的变量论域中删去与当前变量值不相容的值. 如果有未被赋值变量的论域变成空, 则当前变量的这个值被拒绝. 否则, FC 算法将继续给未被赋值的变量赋值, 直到所有的变量都被赋值. 如果当前变量的所有值都被拒绝, 则回溯到前一个变量. 如果没有变量可被回溯,则说明问题不可解决.例1. 1 用8 皇后问题来演示FC 算法.图1 演示了已放置4 个皇后的情形(皇后用“# ”号表示) . “?”号表示该变量值与前4 个皇后的值冲突. 例如, 第五行第一列处是“?”号, 因为它与第一个皇后的值冲突. 从例1 . 1 可看出, 第四行第二列处不能放置皇后, 因为在其放置了皇后后, 第六行的所有值都与前面所赋的值产生冲突.1. 3 在搜索中搜集信息策略事实上, 因为搜索树中的兄弟子树在搜索空间上非常相似, 所以在搜索时允许我们从经验中学习.当要求回溯时, 可以分析失败的原因, 使得将来避免犯类似错误.B J (Back J um ping) 算法: B J 算法的过程和BT 算法除了处理回溯时的差异外相似. 每次给1 个变量赋值, 并保证变量被赋的值与前面的变量所赋的值相容. 如果变量无值可赋, 则发生回溯. 然而, 在需要回溯时, 用B J 算法分析并找到引起失败的变量( 称为罪犯, culprit) . 若当前变量的每个值都与前面某个变量的值冲突, 则回溯到最近的罪犯节点, 而不是只回溯到上一个节点.如果当前变量被曾经赋过值, 在发生回溯时, 只回溯到上一个节点.例1. 2 用8 皇后问题演示B J 算法.图2 演示了已经放置了5 个皇后的情形. 要放第六个皇后时, 发现它的每个值都产生冲突. 在第六个皇后的每个格(值) 中, 都写明了使这个值冲突的罪犯. 如对于{6 ,B}产生冲突的罪犯是皇后3 . B J 算法将回溯到最近的罪犯皇后4 , 而不是回溯到皇后5 .因为从图2 中可以发现, 即使改变皇后5 的值也不能解决冲突.约束满足问题的搜索次序2被处理变量的次序和变量论域中的值被赋给变量的次序的不同在很大程度上影响了搜索策略的效率.在预测算法中, 被处理变量次序的不同将影响搜索空间被减少的数量.2. 1 搜索中变量的次序2. 1 . 1 启发式最小宽度排序(MWO)可应用变量的最小宽度排序问题应有如下特点: 在问题中, 一些变量比其它变量被更多的变量约束. 启发式最小宽度排序的策略首先是将所有的变量进行总的排序, 并要求在该排序下有最小宽度. 然后根据此排序来处理变量, 即该策略是把被更少的变量约束的变量放在后面处理, 这样可能使得要求的回溯减少.对所有节点进行排序时, 节点v 的宽度是排在v 前面并且与节点v 临近的节点的数目.一个排序下的宽度是指在这个排序下所有节点的最大宽度. 一个图的宽度是指在所有排序下的最小宽度.例2. 1 用一个简单的例子来演示MWO.变量A , B , C 的域都是{ r , b} , 并且A ≠B , A ≠C. 以图3 所示的约束图为例. 如果变量被标定的顺序是( B , C , A) , 节点 B 和C 的取值有可能是〈B , r〉和〈C , b〉这时, A 的任何值都不能满足所有的约束. 所以, 要找到解, C的取值必须修订. 如果先给变量A 赋值, 则无论A 被赋什么值都不需要回溯. 仔细观察可以发现, 变量的顺序是( B , C , A ) 时, 该排序下宽度是2 ; 而排序( A , B , C) 和排序( B , A , C) 的宽度都是图3 要被搜索的约束图1 , 如图4 所示.实验表明, 用回溯算法( B T 算法)和前向检查算法( FC 算法) 求解该问题时, 变量的排序为( A , B , C) 时的搜索空间都比变量的排序为( B , C , A)时的搜索空间小.图4 排序与宽度的关系2. 1 . 2 最先失败原则( F FP)最先失败原则建议最可能引起失败的任务应最先执行. 其目的是为了尽早地发现失败, 这样可以节省搜索的开销.根据这个策略, 下一个要处理的对象应是在其上约束最多的变量. 一个简单的方法是测量变量的论域, 使得下一个要被处理变量的论域是最小的. 在简单的回溯算法中, 如BT 算法, 变量的论域是静态的. 因此, 应用FFP 意味着在搜索开始前, 将变量按照它们论域的大小以上升次序排列. 当FFP 和预测算法一起使用时, 变量的排序是动态的. 在给每个变量赋值以后, 传播约束, 然后比较所有未被赋值的变量的论域, 选择拥有最小论域的变量.2 . 1 .3 最大基数排序(MC O)最大基数排序策略可看成与最小宽度排序大致相同的策略, 可用下面方法实现: 首先, 任意选择一个节点作为这个排序的最后一个节点. 然后, 在所有未被排序的节点中, 选择与排序节点相邻的数目最多的节点, 并把该节点作为这个排序中的倒数第二个节点. 如果与排序的节点相邻数最多的节点不止1 个, 则任选其一. 重复上述过程, 直到所有节点都被排序, 就可得到一个最大基数排序; 若将该排序顺序颠倒, 则得到一个新的排序. 新排序的宽度很小.例2. 2 用约束图5 显示一个给定的例子, 找到它的一个最大基数排序的步骤.首先, 任选节点 A , 在 A 被选后( 即现排序中只有节点A) , 节点B , C , F 都与节点A 相邻, 可以在和A 相邻节点中任选一个节点B ( C 或F) 进行排序.得到的最大基数排序是( G , F , E , D , C , B , A) ,其宽度为4 , 如图6 所示. 若将该排序的顺序颠倒,则可得到一个新的排序( A , B , C , D , E , F , G) , 它的宽度为2 , 如图7 所示.图5 给定一个约束图2. 2 搜索中值的排序2. 2. 1 基本原理当选择下一个要被处理的变量时, 应选择约束最多的变量. 因为, 如果能确定该变量产生冲突, 其它变量则不需测试. 如果要给1 个变量选择1 个值, 则应选择最可能成功的值.这样可以减少回溯, 因为如果失败发生就可能产生回溯.在值的排序策略中, 若存在解的可能性比较大的分支能被确认并最先搜索, 则可以更有效地发现第一个解. 然而, 除非使用学习算法, 否则值的排序不能减小搜索空间. 所以, 除非用到学习, 否则值图6 排序完成后得到最大基数排序的宽度图7 颠倒后排序的宽度的排序只能用来发现第一个解.2. 2. 2 最小冲突策略在给变量值排序时, 应将最有希望的值排在前面. 最小冲突策略在为变量值排序时是根据它们与未被标记变量之间的约束而定的, 并将最有可能成功的值放在最前面.程序最开始时有两个集合: LABL E S- L E FT 和LABL ES- DONE. LABL ES- L EFT 被初始化为每个变量和它的任意一个值组成的集合. LABL ES- DONE 被初始化为空集. 在LABL ES- L EFT 集合中, 发现变量x 的标签〈x , v〉(标签label 由1 个变量和它的1 个值组成) 和其它的标签有冲突, 就将它从该集合中删去.然后将x 论域中与集合LAB E LS- DONE 中的标签不发生冲突的所有值找到, 并将这些值按照和集合LAB E LS- L EFT 中的标签产生冲突的数目的大小排序, 产生冲突数目最小的值排在最前面. 再把被排序的值中的第一个值赋给x , 并将该标签放入集合LAB E LS- DONE 中. 若没有这样的值存在( 如x 的值域中所有的值都和集合LAB E LS- DONE 中的某些标签产生冲突) , 就发生回溯. 如果集合LAB E LS- L EFT 中所有的标签都无冲突或者标签的所有组合都已试过, 则程序终止.I LO G SOL VER 求解系统33. 1 系统简介SO LVER 中提供的基本类型有: Ilc Int , IlcAny , IlcFl oat , IlcB ool . 其中IlcAny 表示被SOLVER 枚举类型的变量和集合类型的变量处理的对象.任何对象的指针都被转换成IlcAny 型.大多数SOLVER6 实体都使用handle 类和实现类. handle 类的对象指向相应实现类的对象. 使用handle 的好处是不需要考虑它们的内存管理. 当一个类以I 结尾, 说明它实际上是一个实现类. handle 类的构造函数从一个指向其实现类实例的指针构造了一个handle 对象. 对于handle 类的每一个成员函数, 实现类中都有一个同名的成员函数.为了容易还原到先前的状态, SOLVER 为每个基本的类型都提供了一个类( 称为可逆类) . 这些类都有对应于基本类型的值数据成员, 当SOLVER 回溯时, 它们可被自动还原.可逆类有: IlcR evInt , Il2 cR evB ool , IlcR evFl oat , IlcR evAny.有限集合用来表示约束整型变量和约束枚举变量的论域, 也用来表示约束集合变量的值. SO LVER 提供了有限集合有效的实现方法: bit vectors. 指针的有限集合是类IlcAnySet 的实例.3 . 2 目标( G oal)SO LVER 中搜索算法可通过goals 来实现. 像其它的SOLVER 实体一样, 一个目标可由Ilc G oal 类和Ilc G oal I 类的实例两个对象来实现. Ilc G oal I 类有一个虚拟成员函数ex ecute , 可用来实现目标. 成员函数ex ecute 必须返回另一个目标, 即这个目标运行下的子目标. 若返回值为0 , 说明没有子目标. 目标通过目标栈的途径来运行. 函数Ilc I nit 建立了一个目标栈, 函数IlcS olve 建立了一个新的目标栈并把先前的目标栈隐藏起来. 运行结束后, IlcS olve 破坏掉它的目标栈, 并使先前的目标栈可见. 函数IlcActive 将一个目标放入当前的栈中, 函数IlcNex t S oluti on 控制目标栈的运行. 事实上, 一个目标可以被定义成一个不同目标间的选择, 这样的目标称为选择点. 选择点可通过下述步骤实现:(1)(2)(3)保存SO LVER 的状态, 包括目标栈的状态. 第一个子目标被加到目标栈的顶部.其它的子目标被保存为未运行的选择点.( 4) 第一个子目标从目标栈的顶部弹出并运行. 若这个子目标失败, 保存SOLVER 的状态, 并将第一个未被运行的选择点压入目标栈, 称为回溯.可采用两种方式控制目标的运行: 一个方式使用函数IlcS olve (它用其形参初始化目标栈) ; 另一种方式是使用函数IlcActive 和IlcNex t S oluti on. 第二种方式是针对目标是约束时使用的.(1) 函数IlcB ool IlcS olve ( I lc G oal goal , IlcB ool restore = IlcFalse) . 该函数建立了一个新的目标栈并用目标初始化这个栈. 这个新的目标栈暂时隐藏了先前的目标栈. 然后该函数从目标栈不断弹出目标目标的运行能将其它的目标压入栈, 设置选择点. 函数终止于两种情况: 第一, 如果它的目标栈为空则函数返回值为IlcT rue . 若参数restore 的值为IlcT rue , 则SO LVER 的状态被恢复; 第二, 如果发生失败并且没有未被测试的子目标, 则函数返回值为IlcFalse , 并且恢复到SOLVER 的状态. 函数IlcS olve 终止时, 它破坏掉自己的目标栈, 使得先前的目标栈成为可见.(2) 函数V oid IlcActive ( I lc G oal goal) . 该函数将目标压入当前目标栈.(3) 函数IlcB ool IlcNex t S oluti on ( ) . 该函数运行目标栈直到一个结果被发现. 第一次调用此函数它从目标栈中弹出目标并运行它. 函数IlcNex t S oluti on 的运行终止于两种情况. 第一, 目标栈为空, 函数返回真. 第二, 失败发生并且没有未被运行的子目标, 函数返回失败, 并恢复到SOLVER 的状态. 第二次及以后调用该函数则从上次停止的地方开始运行.SO LVER 提供了一个目标的子类IlcDem onI. 该类的实例称为dem ons. 这个类要求目标没有子目标.当目标在约束传播队列中时, 它为立即运行的目标.3. 3 约束在S OLVER 中, 约束是一个对象. 也可以把约束认为是一个布尔表达式. 表达式的值依赖于约束的可满足性: 如果不违反约束, 则表达式的值为真; 如果约束不被满足, 则表达式的值为假. 表达约束的布尔表达式可以用逻辑操作or , and , not 来结合.一个约束也是一个目标(因为约束类是目标类的子类) , 所以约束能被压入目标栈. 当IlcS olve 或IlcNex t S oluti on 执行约束时, 约束被告知SOLVER (通过IlcT ell) .3. 4 解的搜索通常, 约束问题中的未知量被表示成约束变量. 约束问题的解可通过给每个约束变量赋值得到,并使得所有的约束都被满足. 为了达到此目的, S OLVER 提供了枚举算法, 这个算法带有参数(为了选择变量被例化和值被测试的次序, 参数被设置) .3 .4 . 1 选择约束变量在最初开始寻找解时, 为了选择变量被例化的次序, SOLVER 允许设置参数. 可以通过用选择函数的途径来完成. 这部分地解释了为了选择变量而用宏来建立新的选择函数的预定义函数.对于约束整型、浮点、枚举和集合变量许多标准被预先定义. 例如, 函数Ilc I nt Il cC hooseF i rs2 tUnboundInt (const Ilc IntV arArray vars) , 这个函数的返回值是约束变量数组vars 中所有未被例化的变量中的第一个未被例化的变量的索引.对于约束整型变量的选择函数应该有如下类型的签字( s ignature) .typedef Ilc Int ( 3 IlcC hoose Int Index) ( Ilc IntV arArray) : 这个C + + 类型表示一个指向函数的指针, 该函数的参数类型是约束整型表达式数组, 返回值是整数. 在SOLVER 中, 可用下面的宏定义新的选择标准.如果只有一个整数标准, 应使用宏IlcC hoose I ndex 1 .IlcC hoose I ndex1 (n am e ,criteri on ,varT ype) : 这个宏为varT ype 类型的选择变量定义了一个选择函数. 函数的名字是nam e , 第二个参数criteri on 是一个整型的C + + 表达式. 名字为nam e 的函数的返回值是一个varT ype 类型的约束变量的索引, 该变量在表达式criteri on 中取最小值. 若所有约束变量都被例化, 则函数返回值为- 1 .3 .4 . 2 选择值SOLVER 允许用户控制约束变量论域中值被测试的次序. 下一个要测试的值的选择通过一个对象来实现, 这个对象的类依赖于约束变量的类. 这些类有: Ilc IntSelect , IlcAnySelect , Il2 c I ntSetSelect , IlcAnySetSelect .这些对象通常使用如下类型的评价函数:typedef Ilc I nt ( 3 Ilc E val I nt) ( I lc I nt val , I lc IntV ar var) ;这个类型表示指向函数的指针, 函数的第一个参数是整数, 第二个参数是约束整型变量, 返回值是一个整数.typedef Ilc I nt ( 3 Ilc E valAny) (const IlcAny val , I lcAnyV ar var) ;这个类型表示指向函数的指针, 函数的第一个参数是一个指针, 第二个参数是约束枚举变量, 返回值是一个整数.3 .4 . 3 例化约束表达式目标Ilc Instantiate 可用来给约束变量分配一个值, 它使用选择点. 若发生失败, 将分配给另一个值变量. 根据约束变量类型的不同, 目标Ilc I nstantiate 的行为略有不同.Ilc G oal Ilc I nstantiate (const Ilc I ntV ar var , Ilc I ntSelect select) ;如果var 已经被例化, 则Ilc Instantiate 不做任何事. 否则, 它设置一个选择点, 然后分配一个值给约束变量. 如果失败, 这个值被从约束变量的论域中去掉, 并分配另一个值给约束变量, 直到赋值成功或论域为空. 如果提供了select 对象, 则值通过select 对象被选择, 否则以升序被测试.对于整型约束变量有效的Ilc Instantiate 算法, 对约束浮点变量并不很有效. 因为, 约束浮点变量论域中的浮点值数目太多. 这样, 要采用完全不同的方法, 将约束浮点变量论域递归的分两部分.Ilc G oal Ilc I nstantiate (const IlcFlaotV ar var , IlcB ool IncreaseMinFirst = IlcTrue , IlcFl oat prec = 0) ;如果var 已经被例化, 则Ilc Instantiate 不做任何事. 否则, 它会设置一个选择点, 将变量的论域用论域本身的一半来代替, 并递归地调用它. 如果函数被例化, 或知道一个比prec 更小的precisi on , 则函数停止. 若发生失败, 则论域被另一半代替并递归地调用函数Ilc I nstantiate .3 .4 . 4 枚举和传播算法SO LVER 提供的带有参数的枚举算法可在搜索解时设置变量选择次序.函数: Ilc G oal Ilc G enerate (const Ilc I ntV arArray , IlcC hoose I nt I ndex chooseV ariabvle , Ilc I ntSelect) ; 目标是要例化数组中的每一个约束变量, 通过为它们中的每个调用函数Ilc I nstantiate .变量被例化的次序由函数choose I ndex 来控制. 当提供参数select 时, 该参数在每次调用函数Ilc I nstantiate 时被传递.3. 5 约束的实现SO LVER 提供了一个足够的预定义约束库来满足广泛的应用. 可以用逻辑操作将预定义操作结合起来, 为特殊问题建立更复杂的约束. 很少需要自己定义新的约束类. 然而, 在逻辑操作不能满足特定应用所需的约束时, 可以定义一个约束类. 因为定义一个约束类在很大程度上依赖于SOLVER 使用的传播算法, 所以算法被解释. 约束也是目标, 所以约束和目标的关系也被深入的解释.3 . 5 . 1 约束传播算法当通过函数IlcT ell 将约束告诉SOLVER (即公布一个约束) 时, 该约束立刻被用来减少它所包含变量的论域. SO LVER 通过将不满足约束的值删除来减少变量的论域. 将约束告诉SO LVER 的过程是可逆的, 当SOLVER 回溯到一个点, 且在该点上某个约束还未被公布时, 则这个约束可以被去掉.如果约束传播将变量的论域减少到只剩一个值时, 这个约束变量被所剩的那个值例化. 此外, 当把一个约束告诉S OLVER 时, 这个约束被保存. 要使约束所包含的任何一个变量改变时, 这个约束则被激活, 从而使这个约束所包含的其它变量的论域也被改变. 这个过程称为约束传播.SO LVER 中约束传播使用的算法的原则是简单的. SOLVER 维持了一个变量队列, 称为约束传播队列.当改变一个约束变量时, 如果该变量没在队列中, 则把它放入队列的尾部. 只要队列中有变量, 算法就从队列中取第一个变量, 并称这个被取的变量是在过程中.当一个变量在过程中时, 则先将它从传播队列中去掉. 与这个变量相关的每个约束都被检查. 对于每一个被检查的约束, 这个约束包含的所有变量都被检查, 它们的论域被减小以满足这个约束. 如果在这个动作中有一些变量的论域被减小, 则这些变量也被放入队列中. 如果所有论域中的值都满足约束, 或者有一个论域为空, 则算法停止.此算法有如下特性: (1)算法总可以停止; ( 2) 允许约束中包含两个以上的变量, 如算术约束;(3) 可以动态地处理问题, 即可在搜索解的过程中加入新的约束; (4) 不考虑约束的顺序, 论域总是以同样的方式被减小.3 . 5 . 2 传播事件变量上的任何改变都导致包含该变量的约束被检查. 依赖变量的类和变量共有几种改变, 把变量改变成为传播事件.共有以下3 种传播事件: (1) 值传播事件(指约束变量被赋给1 个值) ; (2) 范围传播事件( 指至少论域的一个边界被改变. 如果变量被例化, 这个事件也发生) ; ( 3) 论域传播事件( 指变量的论域被改变, 包括论域中的1 个值被去掉, 边界被改变, 变量被例化) .可能的传播事件依赖于约束变量的类型. 表1 显示了事件和约束变量之间的关系.表1 事件和约束变量的关系约束变量值传播事件范围传播事件论域传播事件3 3 3 3 3 33Ilc I n tV ar IlcAnyV arIlcFloatV ar Ilc I ntS etV ar 33这些事件用来控制何时约束被检查. 事实上, 对于一个给定的变量, 约束可只与一个事件相关联. 例如, 在约束传播算法中, 如果一个在过程中的变量只产生了域事件, 则所有与域事件相关的约束都被检查. 任何与范围传播事件和值传播事件相关的约束都不被检查.约束满足问题I LO G SOL VER 的求解示例4问题描述7 : 地图着色问题是指给地图上的国家( 或地区) 选择颜色, 要求最多使用4 种颜色, 并且两个相邻的国家(或地区) 不能使用相同的颜色.在这个例子中, 我们要给6 个国家用4 种颜色进行着色. 6 个国家是: Belgium , Denm ark , France , G ermany , Netherlands , Lux em bourg. 4 种颜色是: blue , white , red , green.为减少篇幅, 将这个例子的C + + 源程序代码做了部分省略. 从下面的程序代码中可看出, 程序员可以在自己的C + + 程序中直接使用ILO G SOLVER 提供的这些类及函数来完成约束满足问题的求解.这样既节省了用户的时间和精力, 又使得对约束满足问题不十分了解的用户可以完成问题的求解, 非常方便. 以下是C + + 源程序代码:# include〈ilsolverΠilcint . h〉int m ain ( ) {Ilc I nit ( ) ;Ilc I ntV ar Belgium (0 ,3) , Denmark (0 ,3) , France (0 ,3) , G erm any (0 ,3) , Netherlands (0 , 3) , Lux em bourg (0 ,3) ; ΠΠ0~3 分别对应上述4 种颜色Ilc I ntV arArray AllVars (6 , Belgium , Denm ark , France , G ermany , Netherlands , Lux em bourg) ;ΠΠ建立约束:IlcP ost ( France ! = Belgium) ; ΠΠ如果两个国家是相邻的, 则它们不能用相同的颜色.ΠΠ我们只需建立这样一个不相等的约束即可.。
基于CSP算法的数独游戏求解技术
基于CSP算法的数独游戏求解技术在当今时代,数独作为一种智力游戏已经越来越受欢迎。
数独游戏的规则非常简单,把1-9这9个数字填入一个9*9的格子里,使得每行、每列和每个3*3的九宫格内都没有重复的数字。
然而,对于初学者来说,解决数独游戏似乎并不是件轻松的事情。
因此,这就需要一种更加科学、高效的方法来解决这个问题。
本文将介绍一种基于CSP算法的数独游戏求解技术。
什么是CSP算法?CSP算法,即约束满足问题算法,是解决一类复杂的计算问题的有效方法。
CSP算法的核心思想是对问题进行明确的建模,并将解决问题的计算过程转化为一种带有约束的搜索过程。
它能够很好地解决排列、组合和最优化问题等。
并且,由于此算法能够有效地简化问题所需的计算量,因此具有广泛的应用前景。
数独游戏的建模在数独游戏中,我们需要填数到每一个格子,并且保证每行、每列和每个3*3的九宫格内都没有重复的数字。
因为每个格子只有一些特定的数字可以被填入,所以我们可以将这个问题转化为一个经典的约束满足问题。
首先,我们定义一个变量用来表示每个格子的状态,该变量可以取1~9这9个数字中的一个。
然后,对于数独游戏中的每一行、每一列和每个3*3九宫格,我们定义一个约束函数,该函数用于保证该行、该列或该九宫格中的数字不重复。
接下来,我们需要将整个问题建模为CSP问题。
具体来说,我们需要满足以下三个条件:1.定义变量和变量的取值范围对于每个格子,我们定义一个变量,该变量取值范围为1~9。
2.定义约束函数对于数独游戏中每一行、每一列和每个3*3九宫格,我们定义一个约束函数。
该约束函数用于保证该行、该列或该九宫格中数字不重复。
3.定义约束满足问题对于整个数独游戏,我们将变量和约束函数结合起来,构成一个约束满足问题。
我们需要寻找满足所有约束条件的解。
基于CSP算法的数独游戏求解技术有了上面的建模,我们就可以使用CSP算法来求解数独游戏了。
基于CSP算法的数独游戏求解技术具有如下优点:1.高效性该算法能够有效地简化问题所需的计算量,从而大大提高计算效率。
一种基于环切割的约束满足问题求解算法
r t s t c r c i oc d r n o t t p a e he ba kta k ng pr e u e i t WO s e s,t o m e t p s a c st a ta o u i n f r he f r r se e r he he p r ils l to o t a i b e n t e c ce— uts ta d s mp iis t r b e i o a c c e—r e p ob e t ti r he v ra l s i h y l — e n i lfe he p o l m nt y l — e r l m ha s a c c f
( 林 大 学 符 号计 算 与知 识 工 程 教 育 部 重点 实 验 室 长 春 10 1) 吉 30 2 ( 吉林 大 学计 算 机 科 学 与 技 术 学 院 长 春 1 0 1 ) 3 0 2
摘 要
该 文 首 先 给 出一 种 无 环 约 束 满 足 问 题 的 无 回 溯 搜 索 算 法 T e— erh 然 后 将 环 切 割 思 想 嵌 入 到 目前 最 re Sac ,
第3 4卷
第 8期
计
算
机
学
报
Vo .3 No 8 1 4 .
Au g. 2O 11
一类特殊约束的规划问题Lingo求解
束语句 之间是 “ ” 并 的关系 . 不是 “ ” 而 或 的关 系 . 如果
某 规 划 模 型 中 出 现这 种 约 束 . 统 处 理 方 法 是 将 其 分 传
解成等 价几个 模型分 别求解 . 比较 目标 函数值 . 然后
选 择 最 优 的 。例 如 :
ma z 2 l 3 2 4 , x = x+ x" x 4 -
l 0或 6 ≤ l 0 ≤3 0 ≤9
2 <x≤5 0 ̄ 2 O IX ≥ 0 13
可 分 解 为如 下 两 个 规 划 问 题 的求 解
ma z 2 1 3 2 4 x = x+ x+
15 1 3 2 S 3 6 0 .x+ x+ x ≤ 0
现
2 x+ 5 24 x ≤ 6 0 8 12 x+ O 3 0 0
s.6 l 9 . {0≤ ≤ 0 t
2 0≤ , 5 ≤ 0
,
③
≥O
分别求出模型②与模型③ 的解 , 最后选择 目 标函
数值最 大的就为模型① 的解 , 是如果模 型 中多个变 但
量约束都存 在“ ” 或 的情形 . 则原模 型分解 的子模 型数
量太多 . 致计算量 很大 。 导
‘ l Βιβλιοθήκη 总 第 二
收 稿 日期 :0 8 0 — 7 修 稿 日期 :0 8 0 0 20 — 5 0 2 0 —1 — 8
九
三
作 者 简介 : -  ̄(9 5 ) 男 , 西 风 翔 人 , 师 , 士 生 ,研 究 方 向 为数 据 库 理 论 与 技 术 、 件 工程 冯 E- 17 一 , 陕 . 讲 博 软
关 键 词 : ig ;非 线 性 规 划 :数 学 规 划 Ln o
一类约束优化问题的改进教学优化算法
算法 最好 平均 最 差 函数 计 算次 数 改 进的教 学优化 算法 一 1 5 — 1 5 — 1 5 2 0 0 0
在 给 出 了 教 与 学 的 阶 段 后 ,给 出教 学 优 化 算 法 的基 本 步
骤。
第一 步 :给 出初 始群 体P 和 大小 ( 学 生 数 目 ),终 止条 件 。 第二 步 :计算 P 中群 体 的平 均值 。 第三 步 :选定 P 中 的最优 解 为教 师 。
表 1改进 的教 学优 化 算 法和标 准教 学优化 算 法计算 结 果
从表l 可以看出 ,所给的改进教学优化算法 同标准教学优化
算 法 一 样 均 可 以得 到最 优 解 ,但 我 们 的算 法 在 函数 计算 次 数 上
第六步 :如果终止条件成立 ,输出P l 中最好 的解 ;否则令
P = P 1 ,返 回第 二步 。
g 6 ( ) = - 8 x 3 + l 2 ≤ 0
g 7 ( ) =- 2 x 4 一X 5 +X 1 0 0 g 8 ( ) =- 2 x 6 一X 7 +X 1 1 ≤0
g 9 ( ) =- 2 x g —x 9 2≤0
0 t≤1 , i=1 , 2 , 3 , ・ 一, 9 0 X i 1 00 , i =1 0 , l1 , 1 2 0≤ X i ≤1 . i=1 3
2 约 束优 化 问题 的模 型和 相 关概 念
本 文研 究 的约 束优 化 问题 有 如下 形式 :
S ?g ( x 厂 ) ‘ \ I e q O
.
f .
…
、
其中, 厂 : R
R , 窖 : R 一 . R , 鼋是 一个 非负整 数 记 D=( x l g ( x ) \ l e q l x∈詹 )为 ( 1 ) 的搜 索 区 间 在 ( 1 )中 .如果 q=0,则该 问题 是 无约 束优 化 问题 ,如 果 譬 1 .则 f u J 题 是无 约 I 泉
回溯算法在约束满足问题中的应用
回溯算法在约束满足问题中的应用
回溯算法在约束满足问题中有着广泛的应用。
约束满足问题是
一类重要的组合优化问题,其目标是找到满足一系列约束条件的解。
典型的约束满足问题包括八皇后问题、数独、图着色等。
回溯算法
是一种基于深度优先搜索的算法,它通过不断地尝试可能的解,并
在尝试过程中检查是否满足约束条件来寻找问题的解。
在约束满足问题中,回溯算法通过逐步构建候选解,并在每一
步检查当前解是否满足约束条件。
如果当前解不满足约束条件,算
法会回溯到上一步,尝试其他的选择。
这种试错的方式能够高效地
搜索解空间,找到满足约束条件的解。
回溯算法的应用不仅局限于求解约束满足问题,它还可以用于
其他组合优化问题、图搜索等领域。
在实际应用中,可以通过剪枝
等技巧来优化回溯算法的性能,提高求解效率。
总的来说,回溯算法在约束满足问题中的应用是非常广泛的,
它通过深度优先搜索的方式高效地寻找满足约束条件的解,是求解
此类问题的重要算法之一。
一类约束满足问题的LINGO算法
一类约束满足问题的LINGO算法
李朝阳
【期刊名称】《科技广场》
【年(卷),期】2006(000)007
【摘要】LINGO主要用来求解大型数学规划问题,而利用它求解约束满足问题尚未见到文献报道.本文以著名的"斑马"问题为例,将这类约束满足问题转化为0-1规划求可行解的问题,利用LING0求解,取得了满意的结果.
【总页数】2页(P13-14)
【作者】李朝阳
【作者单位】北京工商大学数理系,北京,100037
【正文语种】中文
【中图分类】O221.1
【相关文献】
1.一类基于动态约束满足问题的产品配置方法 [J], 李伟;刘光复
2.一类特殊约束的规划问题Lingo求解 [J], 冯卫兵
3.一类约束满足问题及其算法 [J], 蒋本铁;毕世飞
4.一类新的模糊约束满足问题的建模与求解 [J], 赵瑞清;郝士鹏
5.启发式回溯算法求解约束满足问题 [J], 范如梦;赵春艳;李飞龙
因版权原因,仅展示原文概要,查看原文内容请购买。
一种基于预处理技术的约束满足问题求解算法
一种基于预处理技术的约束满足问题求解算法孙吉贵;朱兴军;张永刚;李莹【期刊名称】《计算机学报》【年(卷),期】2008(31)6【摘要】相容性技术作为约束满足问题的一种有效求解技术,不论是在求解前的预处理过程中,还是在搜索过程中,都扮演着极为重要的角色.文中对预处理阶段的相容性技术进行改进和信息抽取,提出两种应用于搜索过程中的新算法Pre-AC和Pre-AC*,并嵌入到BT框架中,形成新的搜索算法BT+MPAC和BT+MPAC*,给出了其正确性证明,通过复杂性分析得到Pre-AC和Pre-AC*的时间复杂度分别是O(nd)和O(ed2),明显低于目前最流行的弧相容技术的时间复杂度O(ed3).实验测试结果表明:对于不同类别的用例,新算法的执行效率是弧相容维护算法的2~50倍.【总页数】8页(P919-926)【作者】孙吉贵;朱兴军;张永刚;李莹【作者单位】吉林大学计算机科学与技术学院,长春,130012;吉林大学符号计算与知识工程教育部重点实验室,长春,130012;吉林大学计算机科学与技术学院,长春,130012;吉林大学符号计算与知识工程教育部重点实验室,长春,130012;吉林大学计算机科学与技术学院,长春,130012;吉林大学符号计算与知识工程教育部重点实验室,长春,130012;吉林大学计算机科学与技术学院,长春,130012;吉林大学符号计算与知识工程教育部重点实验室,长春,130012【正文语种】中文【中图分类】TP18【相关文献】1.基于改进树分解技术的约束满足问题的符号ADD求解算法 [J], 王敏;徐周波2.一种基于环切割的约束满足问题求解算法 [J], 李占山;李宏博;张永刚;王孜文3.加权约束满足问题的改进RDS符号代数决策图求解算法 [J], 徐周波;杨新亮;古天龙;宁黎华4.一种基于约束满足问题的产品配置方法 [J], 李伟;刘光复;张孟青5.广义动态约束满足问题的一种双层组合启发式求解算法 [J], 阴艳超;刘泓滨因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3 单约束简单 CSP 算法
考虑简单 CSP 问题3A , b1. 1+ b2. 1+ ,+ bk. 1= C4, 由于 b1. 1, b2. 1, ,, bk. 1 都取自{ d1, d2, ,, dl } , 且 A = n, 因此共 n 个取自{ d1, d2, ,, dl } 的非负整数, 于是问题转化为在这 n 个非负整
4 多约束简单 CSP 算法
对于多约束问题3A , f ( B) = C4, 一个显然
的算法是先找出3A , f 1( B) = C4的所有解, 然后
在这些解中寻找所有满足 f 2 ( B) = C 的解, 以此
类推#此算法的困难在于当 A 很大时, 满足 f 1 ( B) = C 解的数量 C一般非常大#理论和试验表 明, 这 C个解中只有非常少的一部分能成为3A ,
0 [ Ki [ Ai #
( 2)
1 170
东北大学学报( 自然科学版)
第 24 卷
有限集 A 中属性取特定值 di 的元素的个数
是有限的#设 A 中属性取值为 d 1, ,, dl 的元素 个数为 B1, ,, Bl , L i = m in{ Ai , Bi } , 问题转化为
K1 d1 + K2 d2 + ,+ Kldl = C , ( 3)
Ki 为变量, 0 [ Ki [ L i , i = 1, 2, ,, l# 将( L 1+ 1) 个 d 1, ( L 2+ 1) 个 d 2, ,, ( L l + 1)
个 dl 组成降 序序列: dc1, dc2, ,, dcH, 其中 H= L 1+ ,+ L l + l #类似地, 可得升序序列: ec1, ec2,
t2 s#
Kl
hl 1 hl 2 , hl , l- 1 tl- 1
即 K= HT , 其中 H 为整系数矩阵, T 为整参数矩
阵#T 任取一组整数便 得到方程的一个解#加入 取值范围约束条件便可得到一个整数不等式组:
0 [ HT [ L, L = ( L 1, L 2, ,, Ll ) T # ( 4)
1 约束满足问题的定义
约束满 足问题的 经典定义[ 1~ 3] 主要 体现的 是一组赋值和多个约束之间的满足关系, 其基本 算法是递归形式的回溯算法[ 4, 5] ( 算法 1) 和弧一 致性算法[ 6] #在 应用 中还 提出 了多 组 赋值 的问 题, 此时出现了同一变量的不同取值之间的制约 问题#为此, 下面给出另外一种 CSP 的定义#
2 一对一简单线性约束满足问题
在 CSP 问题中一类约束形式是
收稿日期: 2003- 06-09 基金项目: 辽宁省自然科学基金资助项目( 9910701001) # 作者简介: 蒋本铁( 1947- ) , 男, 辽宁大连人, 东北大学教授#
b1. 1+ b2. 1+ ,+ bk. 1 = C1,
图 1 二维特例 Fi g. 1 Case of 2D
对于点 T 这类偏离直线很远的点是没有必 要测试的, 只需要测试直线两侧的点就足够了, 从 纵轴方向看只需测试 7K2= 0, 7 K2= 7, 7K2= 14 共 3 个点就够了#把这种想法具体化并推广到多维 情况可得到如下算法( 算法 2) : int IsLin( int Array [ ] , int C, int L en, int Solut ion [ ] ) / * 如果 Array [ 0] ~ Array [ L en- 1] 能组合出 整数 C 返回 1( 有解) , 解放入数组 Solut ion; 否则 返回 0* /
S 3 = ( 7C / d 2ô+ 0) (7 C / d 3ô+ 1) / 2 # 推广之即可得 l 维情况下的测试点总数:
S l = ( Sl- 1 + 0) (7 C / dlô+ 1) / 2, 则 Sl = (7C/ d2ô+ 1)(7 C/ d 3ô+ 1) ,(7C/ dlô+ 1)/ 2l- 1 # 如果忽略掉 1, 可得求解式( 2) 的时间复杂度为
0 [ Ki [ L i , i = 1, 2, ,, l #
求解式( 3) 涉及到数论中非常复杂的不定方程
非负整数解的问题, 迄今只得到了一些局部结论# 本文提出 3 种算法, 并详细讨论第 3 种#
( 1) 整数规划法
引入非负整数变量 z , 则式( 3) 可以转化为下 面的线性整数规划问题:
min z
设集合 A = { a1, a2, ,, an } , 其中任一元素 ai 有 m 个属性, 记作 ai . 1, ai . 2, ,, ai . m , 假定 属性的取值总是非负整数#现在要从 A 中选取一 个子集 B = { b1, b 2, ,, bk } , 使得 B 各元素的属 性值满足一些约束条件( 这里只讨论等值约束) :
,, ecH#
N
N- 1
6 6 设下标 N 满足: eci \ C 2 且 eci [ C2,
i= 1
i= 1
N
6 取 M = max 1+ C 1, 1+ dci , 则对于算法 3 i= 1
第24卷第 12期 2003 年 12 月
东北大学学报( 自然科学版) Journal of Nort heastern U niversity( Natural Science)
文章编号: 1005-3026( 2003) 12- 1169- 04
Vol124, No. 12 Dec. 2 0 0 3
b1. 2+ b2. 2+ ,+ bk. 2 = C2, ,,
b1. m + b 2. m + ,+ bk. m = Cm # 这是一种系数全为 1 的线性约束, 且每个约 束只对应一个属性, 这类 CSP 问题不妨称之为简 单一对一线性约束满足问题, 以下称简单 CSP, 其 约束形式可以简记为
f 1( B. 1) = C1, f 2( B. 2) = C2, ,, f m( B. m) = Cm #
最坏情况下的时间 复杂度, 从而能够 比较清 晰地描 述一类 约束满 足问题的 一般分 析过程, 揭示 了
约束满足问题同经典的整数规划、数论和整数环论的 联系# 关 键 词: 约束满足问题( CSP ) ; 不定方程; 整数规划; 偏移方程; 时间复杂度
中图分类号: T P 311
文献标识码: A
约束满足问题( Constraint Satisfaction Problem, CSP) 是人工智能领域的一个重要问题, 在网络规 划、语言理解、模式识别等领域也有着重要的应用#
显然式( 4) 和式( 3) 同解#不等式组( 4) 在实数 集上的求解已经有了很好的算法[ 9] , 整数集上的求
解还少有文献论及#若结合数论和整数环论的研 究[ 10] , 作者认为不等式组法是很有希望的算法#
( 3) 直接求解不定方程法
先考虑求解式( 2) 的算法#考虑二维特例: 3K1 + 7K2= 17, 如图 1 所示#搜索它的非负整数解相 当于考查直线 3 K1+ 7 K2= 17 是否经过交叉点#
f ( B) = C4的解# 搜索满足多约束子集的计算是串行的, 没有
考虑到 A 中各属性取值之间的依赖关系#事实上 可以对两个或多个约 束的满足性进 行并行的判
定, 至少在形式上可以做到并行判定# 定理 1 对于下面的不定方程组: K1 d 1 + K1 d 2 + ,+ Kl dl = C1 ¹ K1 e1 + K2 e2 + ,+ Kl el = C2 º ( 6)
K1 d 1 + K2 d 2 + ,+ Kldl + z = C ,
0 [ Ki [ L i , i = 1, 2, ,, l ; Ki , z 为非负整数 # 若求得整数规划最优解为 0, 则由此最优解
可得到式( 3) 的一个解#整数规划有大量的成果可 应用, 文献[ 7] 中将整数规划化为连续非线性规划
f 1( B) = C1, f 2( B) = C 2, ,, f i ( B) = Ci # 其中, C1, C 2, ,, Ci 为非负整常数#
这些约束可以简记为 f ( B) = C, 集合 A 和 约束 f ( B) = C 组 成一 个约 束 满足 问题, 记作 < A , f ( B) = C> #满足约束 f ( B) = C 的集合 B 称为一个解, 通常 B 中元素的个数远小于 A 中 元素的个数, 即 B n A #
一类约束满足问题及其算法
蒋本铁1, 毕世飞2
( 1. 东北大学 计算中心, 辽宁 沈阳 110004; 2. 东北大学信息科学与工程学院, 辽宁 沈阳 110004)
ห้องสมุดไป่ตู้
摘
要: 针 对具有解析 约束形式、同一 变量多赋值 的约束满足 问题, 提出了一 种新的约束 满
足问题定 义# 通过一种特殊约束满足问题的研究提出一套建立 在这个定 义基础之上 的概念和 三种 算法: 整数规划法、不等式组 法和直接求 解不定 方程法, 详细 研究了 其中的 第三种 算法, 并给出 了
{ if( Len= = 1) if( ( C% Arr ay [ 0] ) = = 0) { Solution [ 0] = C/ A rray[ 0] ; return 1; } else r eturn 0;