欧拉-拉格朗日方程(教学知识)
欧拉拉格朗日方程

欧拉拉格朗日方程
欧拉拉格朗日方程(Euler–Lagrange equation)是一种常见的物理方程,它的由来可以追溯到18世纪末的欧拉和拉格朗日。
它描述了一个物体在某种固定条件下的动力学变化,用于描述机械系统的动态行为。
欧拉拉格朗日方程的关键在于,它可以用来描述一个物体受到的外力和内力之间的平衡,以及该物体受到的外力如何影响它的运动。
欧拉拉格朗日方程可以用来解释很多物理现象,比如受到一个固定外力的情况下,物体的动量如何变化,和物体如何做受力作用下的动角变化等。
它还可以用来解释一个物体运动的最小能量状态,以及运动的最佳轨迹等。
欧拉拉格朗日方程的一个重要应用就是可以用它来解释细胞的受力情况,以及细胞在受力的情况下的动力学变化。
在生物学领域,欧拉拉格朗日方程可以用来描述一个细胞受到外力时,细胞内部有哪些变化,以及细胞内部有哪些力在起作用,以及它们之间如何平衡。
另外,欧拉拉格朗日方程还可以用来研究量子力学中的一些现象,例如量子调和力学。
量子调和力学的基本理论就是基于欧拉拉格朗日方程的,它可以用来描述物体在量子场中的运动。
总之,欧拉拉格朗日方程是一种重要的物理方程,它可以用来解释很多物理现象和生物学现象,它也可以用来研究量子力学中的一些现象。
欧拉拉格朗日方程是物理学和生物学研究的重要工具,它将为我们揭开物理和生物学现象背后的奥秘,提供更深入的认识。
理论力学中的拉格朗日方程
理论力学中的拉格朗日方程在理论力学中,拉格朗日方程是一种重要的数学工具,用于描述系统的运动行为和力学规律。
拉格朗日方程由意大利数学家和物理学家约瑟夫·拉格朗日于18世纪提出,被广泛应用于经典力学的各个领域。
1. 拉格朗日方程的引入拉格朗日方程的引入是为了解决在复杂的力学系统中,尤其是多体系统中,求解运动方程困难的问题。
拉格朗日方程通过引入广义坐标和广义速度的概念,将原来的N个质点受力问题转化为2N个一阶偏微分方程组的求解问题。
2. 广义坐标和广义速度在拉格朗日方程中,将系统的坐标由笛卡尔坐标系转化为广义坐标系,这样可以更好地描述系统的自由度。
广义坐标的数目等于系统的自由度,它们可以用来完全描述系统的构型。
广义速度则是对广义坐标的时间导数,表示系统的运动状态。
3. 拉格朗日量在拉格朗日力学中,拉格朗日量是一个以广义坐标、广义速度和时间为变量的函数,代表系统的能量和动力学性质。
拉格朗日量可以通过系统的动能和势能函数得到。
对于自由度为n的系统,拉格朗日量可以表示为L(q, q', t),其中q表示广义坐标,q'表示广义速度,t表示时间。
4. 欧拉-拉格朗日方程欧拉-拉格朗日方程是拉格朗日方程的数学形式,它由拉格朗日原理引出。
欧拉-拉格朗日方程可以描述系统在运动过程中的动力学规律。
它可以表示为d/dt(dL/dq') - dL/dq = 0,其中d/dt表示对时间求导数。
通过求解这个方程组,我们可以得到系统的运动方程。
5. 应用与例子拉格朗日方程在经典力学中的应用非常广泛。
例如,它可以用于求解刚体的运动,弹性体的振动,以及受约束的质点系等问题。
通过将系统的动能和势能函数表示为广义坐标和广义速度的函数,可以得到相应的拉格朗日量,进而求解运动方程。
总结:拉格朗日方程是一种在理论力学中广泛应用的工具,用于描述系统的运动行为和力学规律。
它通过引入广义坐标和广义速度的概念,将系统的受力问题转化为求解一阶偏微分方程的问题。
最新理论力学-拉格朗日方程教学讲义ppt

m2g
此为一个自由度质点系,选角α为
广义坐标。
y
第七章 拉格朗日方程
§7-1 动力学普遍方程
例题 7-1
δrB F*B B
m1g δrC
d
O
α
x
ω dα
δrA A F*A
m1g
C
m2g
各质点的虚位移可用广义坐标的
变分表示
xA(dlsi n), xAlcos
yAlcos
yAlsin
xB(dlsi n),xBlcos
yBlcos,
yBlsin
yC2lcos, yC2lsin
y
第七章 拉格朗日方程
δrB F*B B
m1g δrC
§7-1 动力学普遍方程
例题 7-1
F A * x A F B * x B m 1 g y A m 1 g y B m 2 g y C 0(a)
d
O
α
x
ω dα
δrA A F*A
理论力学-拉格朗日方程
动力学
第 七
§7– 1 动力学普遍方程
章
拉
格
§7–2 拉格郎日方程
郎
日
方
程
§7–3 拉格郎日方程的第一积分
目录
第七章 拉格朗日方程
§7-1 动力学普遍方程
第七章 拉格朗日方程
第七章 拉格朗日方程
第七章 拉格朗日方程
第七章 拉格朗日方程
§7-1 动力学普遍方程
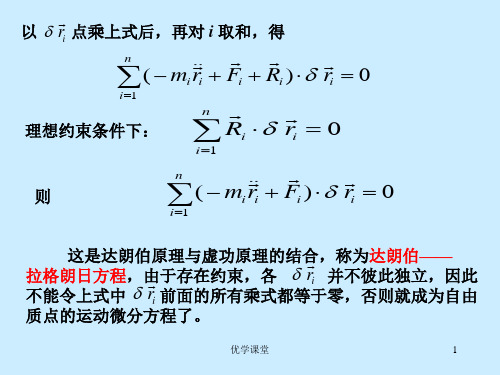
n
(Fi Fi*)ri 0
m1g
C
m2g
y
代入式(a)得
2m 1(dlsi n)2lcos2 m 1gsli n 2m 2gsli n 0
理论力学经典课件第九章拉格朗日方程

理论力学经典课件第九章拉格朗日方程是理论力学的重要组成部分,涉及欧 拉-拉格朗日方程和拉格朗日函数。在本次课件中,我们将深入探讨拉格朗日 方程的定义、应用实例及求解原理,并介绍多自由度的系统和哈密顿原理。 让我们一起来了解这一重要的物理学概念。
引言
理论力学的概念
欧拉-拉格朗日方程
理论力学是研究质点、质点系、 星系、表面、弹性体、流体等 物质运动规律与作用的一门自 然科学。
对于任意系统,在所有可能的 运动中,其真实运动使得作用 量达到最小值,作用量函数是 由拉格朗日函数定义的。
拉格朗日函数
描述了系统状态、参数、状态 变量与计算所有物理量的关系, 对于每一个系统都是唯一的。
拉格朗日方程的概念
参考文献
相关教材
• 《理论力学》(屠光 绍编)
• 《哈密顿力学:平凡 而重要的力学》(丘
• 维《声方编法)学与系统形态 学:拉格朗日方程的 理论与应用》(杨晋 编)
相关论文章
• Wei-Chiam Chung ,David Nezlin, Chuan-Jong Shih (2002)The
• LVa. gBraalankgriiasnhnan, S. FMo.rBmhualtattaiochna,rjee S(p2r0in0g7e)r CUlSassical M echanics: Point Particles and Special Relativity
• , G.WEboardldi,SLc.iZeanntiefi(c 2008)On the Variational and Lag r an g i an Representations of Classical M echanics, INTECH Open Access Publisher
欧拉-拉格朗日方程
欧拉-拉格朗日方程(The Euler-Lagrange equation) 在理想情形下,一函数的最大值及最小值会出现在其导数为0的地方。
同样地,求解变分问题时也可以先求解相关的欧拉-拉格朗日方程。
以下以寻找连接平面上两点(x1,y1) and (x2,y2)最短曲线的例子,说明求解的过程。
曲线的长度为其中f(x1) = y1, f(x2) = y2.函数f至少需为一阶可微的函数。
若f0是一个局部最小值,而f1是一个在端点x1及x2取值为零并且至少有一阶导数的函数,则可得到以下的式子其中ε为任意接近 0 的数字。
因此A[f0+ εf1] 对ε的导数( A 的一阶导数 ) 在ε=0 时必为0。
对任何的函数f1,下式均成立:此条件可视为在可微分函数的空间中,A[f0] 在各方向的导数均为0。
若假设f0二阶可微(或至少弱微分存在),则利用分部积分法可得其中f1为在两端点皆为 0 的任意二阶可微函数。
这是变分法基本引理的一个特例:其中f1为在两端点皆为 0 的任意可微函数。
若存在使H(x) > 0,则在周围有一区间的 H 也是正值。
可以选择f1在此区间外为 0,在此区间内为非负值,因此I > 0,和前提不合。
若存在使H(x) < 0,也可证得类似的结果。
因此可得到以下的结论:由结论可推得下式:因此两点间最短曲线为一直线。
在一般情形下,则需考虑以下的计算式其中f需有二阶连续的导函数。
在这种情形下,拉格朗日量L在极值f0处满足欧拉-拉格朗日方程不过在此处,欧拉-拉格朗日方程只是有极值的必要条件,并不是充分条件。
欧拉拉格朗日方程
欧拉拉格朗日方程欧拉-拉格朗日方程是描述物理系统运动的数学方程,它是经典力学中的一个重要概念。
欧拉-拉格朗日方程对于解决一些复杂的物理问题非常有用,因为它能够将物体的运动归结为一个变量的函数,从而简化问题的分析。
欧拉-拉格朗日方程起源于18世纪的经典力学研究,由两位著名的数学家欧拉和拉格朗日分别发现和发展而成。
这个方程的核心思想是“最小作用量原理”,即物体在其运动过程中所遵循的路径是使作用量在相邻路径之间取极值的路径。
为了理解欧拉-拉格朗日方程,我们首先需要了解一些相关的基本概念。
在经典力学中,一个物理系统可以用它所有粒子的位置和速度来描述。
我们可以将这些粒子的位置和速度表示为一组广义坐标和广义速度,用q和q表示。
而作为这些变量的函数称为拉格朗日量,用L(q,q)表示。
接下来,我们考虑一个力学系统的能量,对于封闭系统来说,能量是一个守恒量。
能量可以看作是拉格朗日量L中动能T和势能V的和,即E=T+V。
动能可以用广义速度q的平方和质量矩阵M(q)的乘积来表示,即T=½q^TM(q)q。
而势能是关于广义坐标q的函数V(q)。
现在,我们可以引入欧拉-拉格朗日方程的基本表达式。
这个方程可以写成d/dt(∂L/∂q)-∂L/∂q=0。
其中∂L/∂q是L对广义速度q的偏导数,∂L/∂q是L对广义坐标q的偏导数。
利用欧拉-拉格朗日方程,我们可以从一个系统的拉格朗日量导出系统的运动方程。
通过假设广义坐标和广义速度关于时间t的函数,我们可以利用欧拉-拉格朗日方程求解物体的轨迹。
欧拉-拉格朗日方程的实际应用非常广泛。
例如,在天体力学中,我们可以利用欧拉-拉格朗日方程来描述行星运动和天体力学问题。
在电磁场中运动的电荷也可以用欧拉-拉格朗日方程来描述。
总之,欧拉-拉格朗日方程是一个非常重要的数学工具,在解决复杂的物理问题中具有广泛的应用。
通过利用欧拉-拉格朗日方程,我们可以简化问题的分析,找到物体的运动轨迹。
欧拉 拉格朗日方程
欧拉拉格朗日方程一、欧拉拉格朗日方程的定义欧拉拉格朗日方程是经典力学中的一个重要概念,由两位著名的数学家和物理学家欧拉和拉格朗日分别独立提出。
它是描述系统运动的一个重要原理,可以从系统的动能和势能出发,推导出系统的运动方程。
欧拉拉格朗日方程的形式简洁,适用于各种复杂的物理系统,对于解决实际问题具有广泛的应用价值。
二、欧拉拉格朗日方程的推导1. 动能和势能的定义首先,我们需要定义系统的动能和势能。
动能是描述物体运动状态的量,通常用T 表示,它的定义为:T=12mv2其中,m是物体的质量,v是物体的速度。
势能是描述物体位置的量,通常用V表示,它的定义为:V=V(x,y,z)其中,V是关于物体位置(x,y,z)的函数。
2. 拉格朗日函数的定义为了方便推导,我们引入拉格朗日函数L的概念,它定义为系统的动能T减去势能V,即:L=T−V3. 欧拉拉格朗日方程的表达式根据最小作用量原理,系统的运动路径使得作用量S取得极值。
作用量S定义为:S=∫Lt2t1dt其中,t1和t2是选取的两个时刻。
根据变分法,我们可以得到欧拉拉格朗日方程的表达式:∂L ∂q −ddt(∂L∂q̇)=0其中,q是描述系统的广义坐标,q̇是q对时间t的导数。
三、欧拉拉格朗日方程的应用欧拉拉格朗日方程的应用非常广泛,以下是一些例子:1. 单摆的运动考虑一个质点在一根轻绳上进行简谐摆动的情况。
我们可以选择以初始位置为参考点,将质点位置与竖直线之间的夹角作为广义坐标q,则拉格朗日函数为:L=T−V=12ml2q̇2−mgl(1−cosq)根据欧拉拉格朗日方程,我们可以推导出质点的角加速度与夹角q的关系,从而描述单摆的运动。
2. 刚体的运动刚体是一个具有固定形状的物体,它的运动涉及到旋转和平动。
欧拉拉格朗日方程可以用来描述刚体的运动,有助于求解刚体的角速度和平动速度。
3. 量子力学中的波函数在量子力学中,波函数描述了微观粒子的运动状态。
欧拉拉格朗日方程可以应用于波函数的变分原理,从而得到薛定谔方程,进而推导出量子力学的基本原理。
欧拉-拉格朗日方程

欧拉-拉格朗日方程【概述】欧拉−拉格朗日方程(Euler−Lagrange Equation)又称为Lagrange变分法,是一个重要的数学方程。
是由著名数学家Euler和Lagrange共同发现的。
它提供了一种简便有效的方法来求解多元复杂的函数的极大或极小值。
欧拉-拉格朗日方程实际上是也被称作动力系统的微分方程的一种表示形式【原理】欧拉-拉格朗日方程是一条带微分的方程,它是由拉格朗日变分法推出的,其形式如下:$$\frac{\delta\Psi}{\delta y_i}=0$$其中,$y_i$是需要求导的函数的变量;$\Psi$是不可微的函数,它是拉格朗日函数,也叫做动作函数。
具体地说,拉格朗日变分法要求最后计算出的函数值极大时其微分值应该为零,这样就可以使函数值朝着极大值方向变动,而拉格朗日函数记录了变分值之间的微分值大小以及函数变动的方向,因而可以推出欧拉-拉格朗日方程来求解函数本身的极大值或者极小值。
【优点】(1) 欧拉-拉格朗日方程可以不断调整变量,改变函数值,以达到求对对函数的极大值的极小值的目的。
(2) 求解欧拉-拉格朗日方程时涉及到微积分,可以简化解题步骤,省去需要繁琐的推导步骤,从而节省时间。
(3) 此方法可以有效地解决多元变量和复杂函数问题,有效提高解算精度。
【应用】(1) 力学中,欧拉-拉格朗日方程用来求解极小总动量及极小流体效率等。
(2) 工程中,用欧拉-拉格朗日方程来求解某种参数取得某种最佳效果的优化方程。
(3) 电子工程中,欧拉-拉格朗日方程可以用来求解电子电路中、集成电路中最优参数计算问题。
(4) 生物学中,欧拉-拉格朗日方程在对一定植物对环境适应度进行优化时可以得到很好的应用。
理论力学—拉格朗日方程PPT

a1
3(m1
m2 gsin2 m2 )-2m2cos2
ar
2gsin (m1 m2 ) 3(m1 m2 )-2m2cos2
15
§18-2 拉格朗日(Lagrange)方程
由n个质点所 组成的质点系
主动力 虚位移
广义坐标 第i个质 点的位矢
F (F1, F2,, Fn )
r (r1,r2,,rn )
O1
x1
l
l
rA
rB
xA l cos yA l sin
FIA
A B FIB
m1g l
rC l m1g
xB l cos
C
yB l sin
m2g
yC 2l sin
y1
2m1lsin2lcos 2m1glsin 2m2glsin 0
2 (m1 m2 )g
m1lcos
10
例题3 质量为m1的三棱柱ABC
FIA
A B FIB
m1g l
rC l m1g
根据几何关系,有
C
m2g
xA lsin yA lcos
xA l cos
yA l sin
y1
xB lsin
xB l cos
yB lcos
yB l sin
yC 2lcos
yC 2l sin
9
3、应用动力学普遍方程
FIA δxA FIB δxB m1g δyA m1g δyB m2 g δyC 0
其次,要确定系统的自由度,选择合适的广义坐标。 按照所选择的广义坐标,写出系统的动能、势能或广 义力。
将动能或拉格朗日函数、广义力代入拉格朗日方程。
23
欧拉 拉格朗日方程
欧拉拉格朗日方程欧拉拉格朗日方程欧拉方程和拉格朗日方程是经典力学中的两个重要方程,它们被广泛应用于物理学、工程学、数学等领域。
欧拉方程描述了质点在空间中的运动,而拉格朗日方程则描述了质点在势能场中的运动。
一、欧拉方程1.1 定义欧拉方程是经典力学中描述质点在空间中运动的基本方程。
它由牛顿第二定律和牛顿第三定律推导得出,表达式为:F = ma其中,F表示作用于质点上的合力,m表示质点的质量,a表示质点的加速度。
这个公式可以解释为:物体所受合外力等于物体的惯性乘以加速度。
1.2 推导过程欧拉方程可以从牛顿第二定律和牛顿第三定律推导得出。
首先,根据牛顿第二定律:F = ma其中F表示作用于物体上的合力,m表示物体的质量,a表示物体的加速度。
然后根据牛顿第三定律:F12 = - F21其中F12和F21分别表示物体1对物体2的作用力和物体2对物体1的作用力。
将这两个公式代入欧拉方程中,可以得到:m1a1 = F12m2a2 = F21这就是欧拉方程的推导过程。
二、拉格朗日方程2.1 定义拉格朗日方程是经典力学中描述质点在势能场中运动的基本方程。
它由哈密顿原理推导得出,表达式为:d/dt(∂L/∂q') - ∂L/∂q = 0其中,L表示系统的拉格朗日函数,q表示广义坐标,q'表示广义速度。
这个公式可以解释为:系统在满足最小作用量原理下,其运动轨迹应该满足使作用量取极值的条件。
2.2 推导过程拉格朗日方程可以从哈密顿原理推导得出。
哈密顿原理是指,在所有可能的路径中,粒子实际上只会沿着使作用量取极值的路径运动。
因此,如果我们假设系统在某一瞬间处于广义坐标q和广义速度q'处,并且在接下来的一段时间内沿着某条路径运动,则该路径所对应的作用量为:S = ∫L(q,q',t)dt其中,L(q,q',t)表示系统的拉格朗日函数。
根据哈密顿原理,该路径所对应的作用量应该取极值,即:δS = 0将S展开,并对广义坐标和广义速度求偏导数,可以得到:δS = ∫[∂L/∂q δq + ∂L/∂q' δq']dt其中δq和δq'分别表示广义坐标和广义速度的微小变化量。
动力学方程拉格朗日方程教学内容
mi
பைடு நூலகம்
ri q
ri
q
q
q
1
s
1
n i 1
mi
ri q
优r学ti课堂q
1 2
n i 1
mi
ri t
2
22
n
i1
n
i1
n
i1
mi
ri q
mi
ri q
mi
ri t
ri q
a
ri t
a
2 a
则
T
1 2
s
1
a
q
q
s
a q
可见广义力的径向分量就是的径向分量,说明 Qr 是一个力。
另外 x r sin , x r cos
优学课堂
10
Q
Fx
x
Fy
x
r(Fx sin Fy cos )
上式 括号中的第一项为 Fx
在 j 方向的投影,第二项 是 Fy在 j 方向的投影。
所以两者之和就是 F 在 j
y
Fy
视广义坐标的选择而定。 n 而广义力: Q i1
Fi
ri q
广义力可以是力,也可以是力矩等,视广义坐标的选择而
定。计算广义力的方法可以有两种:一种方法是从上定义式直
接计算,另一种方法是从主动优力学课所堂 作的虚功来计算。
6
1、从主动力所作的虚功来计算
W
n i 1
Fi
ri
s 1
s
1
d dt
T q
q
s
T
1 q
q
s
V
1 q
q
其中第一项中
欧拉拉格朗日方法建立动力学方程

欧拉拉格朗日方法建立动力学方程下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!欧拉拉格朗日方法建立动力学方程动力学是研究物体运动规律的重要分支,而欧拉拉格朗日方法是解决动力学问题的一种强大工具。
欧拉 拉格朗日方程
欧拉拉格朗日方程欧拉-拉格朗日方程,也被称为Lagrange equation,是经典力学中一种非常重要的数学工具。
它是由Leonhard Euler和Joseph-Louis Lagrange独立发展而来,用于描述一个具有一般化坐标的物体的动力学行为。
欧拉-拉格朗日方程的使用使得我们能够从一个更为简洁的方程中推导出物体的运动方程,从而更好地理解和分析力学系统。
本篇文章将深入讨论欧拉-拉格朗日方程的原理、应用和意义。
一、欧拉-拉格朗日方程的原理欧拉-拉格朗日方程是从运动方程的变分原理推导出来的。
在经典力学中,物体的运动可以由拉格朗日函数描述,该函数是广义坐标、速度和时间的函数。
它可以写成以下形式:L(q_1, q_2, ..., q_n, \dot{q}_1, \dot{q}_2, ..., \dot{q}_n, t)其中,q_i表示广义坐标,\dot{q}_i表示广义坐标对时间的导数。
拉格朗日函数的变分原理表明,物体的运动路径必须使作用在系统上的作用量达到极小值。
作用量被定义为系统的拉格朗日函数沿着运动路径的积分:S=\int_{t_1}^{t_2} L(q_1, q_2, ..., q_n, \dot{q}_1, \dot{q}_2, ...,\dot{q}_n, t)dt欧拉-拉格朗日方程根据这个原理,通过求解拉格朗日函数的变分得到。
具体地,拉格朗日函数中的每个广义坐标都将对应一个欧拉-拉格朗日方程。
二、欧拉-拉格朗日方程的应用欧拉-拉格朗日方程在经典力学的各个领域中有着广泛的应用。
下面,我将介绍几个常见的应用示例。
1. 粒子的自由运动:对于一个自由运动的粒子,即没有外力作用于它的情况,拉格朗日函数可以写成动能T和势能V的差值。
欧拉-拉格朗日方程可以得到粒子的运动方程,从而描述其运动状态。
2. 简谐振子:简谐振子是一个经典的力学模型,在物理学中有很多应用。
欧拉-拉格朗日方程可以给出简谐振子的运动方程,并描述其振动特性。
欧拉-拉格朗日运动方程

欧拉-拉格朗日运动方程是经典力学中的重要概念,它能够描述物体在外力作用下的运动规律。
这个方程是由欧拉和拉格朗日分别提出的,他们的贡献被后人广泛应用于力学,从基础的经典力学到高级的量子力学和相对论力学都离不开。
最基本的形式是:$$\frac{\partial L}{\partial q_i}-\frac{d}{dt}\frac{\partial L}{\partial \dot{q_i}}=0$$ 其中$L$是拉格朗日函数,$q_i$表示广义坐标,$\dot{q_i}$表示广义速度。
拉格朗日函数$L$可以表示为系统的动能减去势能:$$L=T-V$$ 其中动能$T$是由广义速度表示的,势能$V$是由广义坐标表示的。
的物理意义是:对于一个系统,在给定初始条件的情况下,系统的运动状态可以通过拉格朗日函数得到。
拉格朗日函数是很多物理量的函数,它包含了系统的动能、势能以及系统的限制条件,因此描述了系统的全部运动规律。
的应用非常广泛。
例如,对于一个摆,利用可以推导出摆的运动规律,从而可以得到摆的振动频率以及振幅等等。
再例如,对于光的传播,可以描述光在不同介质中传播的速度,并且预测折射等现象。
不仅为经典力学的发展做出了贡献,而且在量子力学和相对论力学中也扮演着重要角色。
在量子力学中,的推广被应用于描述微观粒子的运动状态。
而在相对论力学中,的形式也有所改变,但它仍然是描述运动规律的基本方程。
总之,是经典力学中的重要概念,它为物理学家提供了一种简洁、通用的描述物体运动规律的方法。
欧拉和拉格朗日的贡献是不能忽视的,正是他们的创意引导了后人在物理学领域的探索,推动了科学的发展。
2.3欧拉方法及拉格朗日方法(共28张PPT)
4.1.1拉格朗日方法(fāngfǎ)
➢ 在直角坐标(zhí jiǎo zuò biāo)中展开
r r (a,b,c,t)
x x(a,b, c,t)
y
y(a,b, c,t)
z z(a,b, c,t)
第六页,共二十八页。
4.1.1拉格朗日方法(fāngfǎ)
流体质点的速度 V r (a,b, c,t) t
r
V
r
Vz
z )ir
V r
i
Di Dt
( t
Vr
r
V
r
Vz
z
)i
V r
ir
所以: a
DVr Dt
ir
VrV r
i
DV Dt
i
V2 r
ir
DVz Dt
iz
( DVr Dt
V2 r
)ir
( DV Dt
VrV r
)i
DVz Dt
iz
向心加速度 : ar
DVr Dt
V2 r
度的表达式为
DV lim V (M ',t t) V (M ,t)
Dt t0
t
第十六页,共二十八页。
4.1.2随体导数(dǎo shù)
这里用 D 表示这种导数不同于牛顿定律 Dt
对速度的简单导数
速度的变化有两方面的原因:
一方面的原因, 质点由M点运动至M '点时, 时间过去了t,由于场的时间非定常性引 起速度的变化
定义流速场V V r,t中的加速度:
如图M点的加速度就是此时过M点 的流体质点的加速度.
第十五页,共二十八页。
4.1.2随体导数(dǎo shù)
1.2欧拉和拉格朗日描述
§1.2 描述流体运动的方法
二、欧拉方法和随体导数
1、欧拉方法
•着眼于流场——流动空间。
描述任意时刻流动空间中各物理量的分布。
•将物理量表示为空间位置和时间的函数。
场点位置坐标称为欧拉变数。
e.g.,速度场:直角坐标系下:•定常流动&非定常流动
•其他物理量场:•两种方法比较:前者便于追踪,后者便于数学处理(场论)
(,)
V V r t =
(,,,)V V x y z t =
(,)(,)(,)a a r t r t p p r t ρρ===
,,等
例1.2 圆桶内流体绕轴线以等角速旋转,
(1)以欧拉方法表述流体运动的速度和加速度;(2)以拉格朗日方法表述流体质点的运动方程、速度和加速度;
解:选取柱坐标系。
1)V r r e θωω=⨯= ,2a r ω=-
2)运动方程:000
, , r r t z z θθω==+=其中()000, , r z θ为质点初始坐标。
非定长流动轨迹
4、其它相关概念
1)脉线(条纹线):不同时刻经过同一给定场点的流体质点的
连线。
2)流面和流管:在流场中取一段曲线(或一条闭合曲线), 经过其上各点的流线组成流面(或
流管)。
* 瞬时性
* 流线不能与流面相交或穿出、
穿入流管
例如:水管
3)时间线。
倒立摆拉格朗日建模方法(一)

倒立摆拉格朗日建模方法(一)倒立摆拉格朗日建模介绍倒立摆是一种经典的控制系统问题,它常用于教育和研究领域。
拉格朗日建模是一种用来描述力学系统动力学的数学方法。
本文将详细介绍倒立摆的拉格朗日建模方法,包括各种方法的详细说明。
方法一:拉格朗日方程1.第一步:定义坐标系。
倒立摆通常使用极坐标系,其中θ表示摆杆的角度。
2.第二步:确定系统的势能能量。
根据重力势能的定义,势能能量可以表示为mgL(1 - cosθ),其中m是摆杆的质量,g是重力加速度,L是摆杆的长度。
3.第三步:确定动能能量。
动能能量可以表示为2θ2,其中L是摆杆的长度。
4.第四步:应用拉格朗日方程。
拉格朗日方程可以表示为d/dt(∂T/∂θ̇) - ∂T/∂θ = ∂V/∂θ,其中T是系统的总动能,V 是系统的总势能。
通过求解拉格朗日方程,可以得到系统的运动方程。
方法二:线性化方法1.第一步:使用欧拉-拉格朗日方程。
欧拉-拉格朗日方程可以表示为∑(∂L/∂qi)d q̇i = q之力 - q之耗散,其中L是拉格朗日函数,qi是系统的广义坐标,q i̇是广义速度。
2.第二步:线性化倒立摆方程。
在小角度下,可以通过将sinθ近似为θ,将cosθ近似为1来线性化倒立摆方程。
3.第三步:线性化的拉格朗日方程可以简化为M q̇ = τ - C q̇ -Gq,其中M是质量矩阵,q̇是广义加速度,τ是外部输入力矩,C是速度相关的阻尼矩阵,G是重力矩阵。
方法三:控制方法1.第一步:设计控制器。
倒立摆系统可以用PID控制器来控制。
PID控制器包括比例部分、积分部分和微分部分,可以通过调整各个部分的参数来实现系统的稳定控制。
2.第二步:实施控制。
将PID控制器的输出作为输入力矩τ,通过不断调整输入力矩来控制倒立摆的角度。
3.第三步:闭环控制。
通过实施闭环控制,将实际角度与目标角度进行比较,并根据误差调整控制器的输出,以实现系统的精确控制。
方法四:倒立摆模拟1.第一步:选择合适的模拟软件。
理论力学第十八章 拉格朗日方程 教学PPT
h
h
j
h
(2)
ri ri (q1, q2 ,...qk ; t) 对任 qh求偏导,再对时间t求导得
d
dt
( ri ) qh
k j1 q j
(
ri qh
)qj
2 ri tqh
k 2r
i
j1 q q
q j
2r i
tq
j
h
h
(3)
式(3)右边与式(2)右边比较可得关系式
i 1
以上二式称为动力学普遍方程 或 达朗贝尔——拉格朗日方程。
n
Fi miai δ ri 0
i 1
n
Fix mi xi δ xi Fiy mi yi δ yi Fiz mizi δ zi 0
i 1
动力学普遍方程
但是,如果改用广义坐标,来描述系统的运动,将动力 学普遍方程表达成广义坐标的形式,就可得到与广义坐标 数目相同的一组独立的运动微分方程,这就是著名的拉格 朗日方程,用它求解较复杂的非自由质点系的动力学问题 常很方便。
拉格朗日方程的推导
设由 n 个质点组成的质点系,受到 s 个理想、完整约束,因此该系统 具有k= 3m- s个自由度,可用 k 个广义坐标 q1 , q2 , … , qk 来确定该系统的 位形。
动力学普遍方程-例题1
动力学普遍方程-例题1
δrB F*B B
m1g δrC
解: 球简化为质点,除主动力外,图上画出了
d
O α δ x
ω dα
δrA A F*A
m1g
飞球的惯性力F*A和F*B,两力大小相等,方 向相反。
欧拉拉格朗日方程计算加速度
欧拉拉格朗日方程計算加速度一、欧拉拉格朗日方程是啥呀。
宝子们。
咱们要聊这个欧拉拉格朗日方程计算加速度,首先得知道这个欧拉拉格朗日方程是个啥玩意儿。
它可不是什么随随便便的东西哦。
这个方程呢,在物理学里那可是相当重要的,就像超级英雄在漫威宇宙里的地位一样。
它是一种非常强大的分析力学的工具,能够帮助咱们从能量的角度去理解物理系统的运动呢。
你想啊,一个物理系统在那里动来动去的,这里面肯定是有能量在捣鬼的。
这个方程就像是一个侦探,能够把能量和运动之间的关系给揪出来。
它把系统的动能和势能联系起来,通过一种很巧妙的数学形式,让我们能够去研究这个系统的各种行为,比如说计算加速度呀。
二、加速度在物理里的意义。
加速度这个东西呢,可太有趣啦。
它就像是一个调皮的小怪兽,影响着物体运动的状态。
加速度描述的是速度随时间的变化情况哦。
如果一个物体有加速度,那就说明它的速度不是一成不变的。
可能是越来越快,像赛车在跑道上冲刺的时候;也可能是越来越慢,就像你骑自行车的时候突然捏刹车。
在生活中呀,加速度无处不在。
坐电梯的时候,当电梯启动和停止的瞬间,你能感受到那种加速度带来的身体上的小变化。
这种感觉就像是有一只无形的手在轻轻地推你或者拉你。
而且呀,加速度对于理解很多物理现象是超级关键的。
比如说星球之间的运动,那些星球可不是慢悠悠地按照一个速度在那飘着的,它们之间的引力会产生加速度,让它们的运动轨迹变得特别复杂又特别迷人。
三、欧拉拉格朗日方程怎么和加速度联系起来。
好啦,现在到了最关键的部分啦。
欧拉拉格朗日方程和加速度到底咋联系起来的呢?其实呀,我们从欧拉拉格朗日方程出发,这个方程里面有关于系统的拉格朗日量,这个拉格朗日量呢是动能和势能的差值。
通过对这个拉格朗日量进行一些数学上的操作,比如说求偏导数之类的。
当我们把这个方程捣鼓捣鼓之后,就能得到关于加速度的信息啦。
就好像是在一个神秘的宝藏地图上,我们按照特定的步骤,一步一步地找到那个藏着加速度宝藏的地方。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
欧拉-拉格朗日方程(The Euler-Lagrange equation) 在理想情形下,一函数的最大值及最小值会出现在其导数为0的地方。
同样地,求解变分问题时也可以先求解相关的欧拉-拉格朗日方程。
以下以寻找连接平面上两点(x1,y1) and (x2,y2)最短曲线的例子,说明求解的过程。
曲线的长度为
其中
f(x1) = y1, f(x2) = y2.
函数f至少需为一阶可微的函数。
若f0是一个局部最小值,而f1是一个在端点x1及x2取值为零并且至少有一阶导数的函数,则可得到以下的式子
其中ε为任意接近 0 的数字。
因此A[f0+ εf1] 对ε的导数( A 的一阶导数 ) 在ε=0 时必为0。
对任何的函数f1,下式均成立:
此条件可视为在可微分函数的空间中,A[f0] 在各方向的导数均为0。
若假设f0二阶可微(或至少弱微分存在),则利用分部积分法可得
其中f1为在两端点皆为 0 的任意二阶可微函数。
这是变分法基本引理的一个特例:
其中f1为在两端点皆为 0 的任意可微函数。
若存在使H(x) > 0,则在周围有一区间的 H 也是正值。
可以选择f1在此区间外为 0,在此区间内为非负值,因此I > 0,和前提不合。
若存在使H(x) < 0,也可证得类似的结果。
因此可得到以下的结论:
由结论可推得下式:
因此两点间最短曲线为一直线。
在一般情形下,则需考虑以下的计算式
其中f需有二阶连续的导函数。
在这种情形下,拉格朗日量L在极值f0处满足欧拉-拉格朗日方程
不过在此处,欧拉-拉格朗日方程只是有极值的必要条件,并不是充分条件。