GPSS语言(2)
GPSS介绍
1 GPSS 语言的基本格式
GPSS 语言程序块的基本格式:
地址 操作码 数据场
注解
语句注释,可有可无
由多个数据组成, 各数据间用逗号分开 操作码即模块或语句名称, 可用前四个字母简写
地址即语句号,最多由五个字母, 数字组成, 必须由字母打头. 从第一列开始. 必要时才用
3-1 GPSS 语言的基本格式
控制语句
LINE CLERK OPER MACH OPER MACH
EQU EQU
EQU EQU STORAGE STORAGE
1 1
1 2
9 4
总队列 ( 1 号队列 ) 职员 ( 1 号设施 )
技工 ( 1 号存储器) 机器 ( 2 号存储器 )
1 FUNCTION 0,720/1,1081 2 FUNCTION 0,120/1,361 3 FUNCTION 0,420/1,781 4 FUNCTION 0,1500/1,5101 5 FUNCTION 0,300/1,781
1
定义语句: 定义函数, 实体,变量,开关等
1
GENERATE 18,6
QUEUE LINE
SEIZE
JOE
DEPART LINE 程序语句(模)块: GPSS 语言模块
ADVANCE 16,4
RELEASE JOE
TERMINATE 1
START
25
控制语句:控制模拟过程
END
TERMINATE 1
TERMINATE 1
3-5 GPSS/PC 程序的运行
RN$2,C2 工件到达间隔时间 (12 - 18) RN$3,C2 职员初步记录时间 (2 - 6) RN$4,C2 技工准备工具时间 (7 - 13 ) RN$5,C2 机器操作时间 ( 25 - 85 ) RN$6,C2 职员的最后处理时间 ( 5 - 13 )
第4章 GPSS 常用语句及其使用
MSSV1.0
管理系统模拟与GPSS语言
8
变量在程序中的调用
在程序中调用变量时, 采用 SNA 码,
即 V$变量号.
例: ASSIGN 1, V$1 ASSIGN 1+, V$5 ADVANCE P$1, V$3
C$1 P$j V$j Q$j RN$j FN$j
变量的定义必须在程序之前完成, 程序中间 不能重新定义 !
2 号函数由四个离散点组成, 自变量由参数 P$1 确定.
MSSV1.0
管理系统模拟与GPSS语言
12
4-2-2 函数定义语句
例: 一检查员检查时间的概率分布为:
检验时间
发生频率
累计频率
15
0.1
0.1
16
0.6
0.7
17
0.3
1.0
则函数可定义为:
1
FUNCTION RN$1, D3
0.1, 15 / 0.7, 16 / 1.0, 17
C$1 模拟钟 P$j 动态实体所带的第 j 号参数 V$j 第 j 号自定义变量 Q$j 第 j 号队列的当前长度 RN$j [ 0, 1) 之间的均匀分布随机数, j 为随机数发生器号 FN$j 第 j 号自定义函数
: 其中 $ 是 GPSS/PC 要求的。
MSSV1.0
管理系统模拟与GPSS语言
MSSV1.0
管理系统模拟与GPSS语言
4-2-3 存储器定义语句
13
存储器定义语句用来定义存储器的容量, 其格式如下:
1. 单独定义: 存储器号 STORAGE 容量
2. 集中定义:
STORAGE S$存储器号, 容量/ ....
例: 1 STORAGE 100 10 STORAGE 500
GPSS的定义语句及其使用
4
序号 1 2 3 4 5 6 7 8 9 10
分类 模拟钟
属性码 C1 AC1 P$v_j PR
活动实体
M1 MP
变量 函数
V$v_j FN$v_j Q$v_j QA$v_j
11
12 13 14 15
队列
QM$v_j
QC$v_j QZ$v_j QT$v_j QX$v_j
名为v_j的队列的最大长度
名为v_j的队列的总排队人数 名为v_j的队列的未排队人数(经过而不等候的人数) 名为v_j的队列的活动实体的平均等待时间 名为v_j的队列不包括零等待活动实体的平均等待时间
名为v_j的设施的状态,使用中为1,闲置为0 名为v_j的设施的利用率 名为v_j的设施的的活动实体总数 每个活动实体对名为v_j的设施的平均占用时间 名为v_j的存储器的当前含量 名为v_j的存储器的剩余容量 名为v_j的存储器的利用率(‰) 名为v_j的存储器的平均含量 名为v_j的存储器的最大容量 名为v_j的存储器满为1,不满为0 名为v_j的存储器的进入计数 名为v_j的保存值数值 名为v_j的存随机数发生器产生的随机数 名为v_j的逻辑开关打开时为1,否则为0 名为v_j的逻辑开关打开时为0,否则为1 名为v_j的模块活动实体总进入数
西南交通大学经济管理学院王艺然
管理系统模拟与GPSSWorld语言
各种属性一览表
表二
5
序号
16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
分类
设施
属性码
F$v_j FR$v_j FC$v_j FT$v_j S$v_j R$v_j SR$v_j
表示内容
GENERATE ASSIGN ADVANCE TERMINATE 1 P_X1, RN1 10 1
GPS专业术语
4.9惯性导航系统inertial navigation system(INS)利用惯性仪表(陀螺仪和加速度计)、参考方向和初始位置来测量载体运动方向、速度【中华人民共和国国家标准GB/T 19391-2003 】1 范围本标准规定了全球定位系统(GPS)常用术语及定义本标准适用于GPS专业范围内的各种标准的制定、各类技术文件的编制,也适用于科研、教学等方面2 通用术语2.1全球定位系统global positioning system(GPS)导航星navigation by satellite timing and ranging(NAVSTAR)一种卫星导航定位系统由空间段、地面控制段和用户段三部分组成.为伞球用户提供实时的三维位置、速度和时间信息包括主要为军用的精密定位服务(PPS)和民用的标准定位服务(SPS)2.2全球导航卫星系统global navigation satellite system(GLONASS)一种全球卫星导航定位系统:为全球用户提供实时的三维位置、速度和时间信息包括军用和民用两种服务2.3伽利略系统Galileo system一种民用全球卫星导航系统;2.4全球导航卫星系统global navigation satellite system(GNSS)由国际民航组织提出的概念GNSS的最终目标是由多种民用卫星导航系统组成,向全球民间提供服务并将由多国民间参与运行和控制的卫星导航系统GNSS也已经为国际海事组织(IMO)所接受欧洲的GNSS计划分为两个阶段即GNSS-1和GNSS-2GNSS-1为EGNOS(欧洲地球静止轨道卫星导航重叠服务)系统,GNSS-2为Galileo(伽利略)系统2.5静地星/定位星系统Geostar/Locstar system一种卫星定位系统,利用两颗地球轨道静止卫星双程测距而实现定位功能兼有简短报文通信能力2.6海军导航卫星系统navy navigation satellite system(NNSS)子午仪Transit是1960年由美国研制的卫星导航系统,为固定用户或低动态用户提供不连续定位信息注:已于l997年12月31日关闭2.7国际GPS动力学服务international GPS geodynamics service(IGS)国际大地测量协会于1994年创立的国际GPS研究服务机构它负责向世界各国的GPS用户提供精密的星历、地球旋转参数、全球GPS跟踪网数据等多种信息2.8GPS空间段GPS space segment指GPS的空间星座它按设计由分布在6个轨道平面上的24颗导航卫星组成,卫星向地球方向广播含有测距码和数据电文的导航信号2.9GPS地面控制段GPS ground control segment指GPS的地面监测和控制系统,它包括主控站、卫星监测站和上行信息注入站(又称地面天线)以及把它们联系起来的数据通信网络2.10GPS用户段GPS user segment指各种GPS用户终端其主要功能是接收卫星信号,提供用户听需要的位置、速度和时间等信息2.11Block ⅠⅡ,ⅡA,ⅡRⅡR-M,ⅡFⅢ卫星Block Ⅰ,Ⅱ,ⅡA,ⅡR,ⅡR-M,ⅡF,Ⅲsatellites指GPS的各代卫星的名称Block Ⅰ是原型卫星;BlockⅡ和ⅡA是目前的基本工作卫星;Block ⅡR和ⅡR-M是正在发射的替补卫星;Block ⅡF是后继卫星 Block Ⅲ是在规划中的2010年以后发射的卫星2.12伪卫星pseudolite设立在地面上的GPS信号发射站它发播与真实的GPS卫星相似的信号可在近距离内起到和GP5卫星类同的作用2.13星历ephemeris描述天体的空间位置的轨道参数2.14GPS卫星星历GPS satellite ephemerisGPS卫星星历一共包含16种数据,它们分别是历元、在历元上的6个卫星轨道参数以及用于在历元之后修正轨道参数的9个系数2.15广播星历broadcast ephemeris卫星播发的电文中所包含的本颗卫星的轨道参数或卫星的空间坐标2.16精密星历precise ephemeris由若干个不属于GPS系统的卫星跟踪站获得的测量值,经事后处理计算出的卫星轨道参数供事后精密定位使用2.17历书almanacGPS卫星电文中包含的所有在轨卫星的粗略轨道参数2.18载频L1、L2、L5 carrier L1,L2L5L1、L2为GPS卫星所发射信号的载频,L1为1575.42MHz,L2为1227.60MHzL5为GPS卫星将增发的民用信号的载频,预定为117**5MHz2.19历元epoch指一个时期和一个事件的起始时刻或者表示某个测量系统的auot cad参考日期注:在GPS术语中两种概念都使用2.20伪随机噪声码pseudo random noise(PRN)code一种具有与白噪声类似的自相关特性确定的码序列GPS信号中采用了伪随机噪声编码技术,以产生码分多址(CDMA),直接宇列扩频和伪距测量功能2.21粗/捕获码coarse/acquisition codeC/A码C/A code用于调制GPS卫星L1载频信号的民用伪随机码2.22精码precise codeP码P code曾经用于调制GPS卫星L1和L2载频信号的伪随机码2.23P(Y)码P(Y)codeY码Y codeGPS卫星用于调制L1和L2载频信号的军用伪随机码,由P码与加密码W模2相加而成由于Y码仍然保持着P码的码速率,因此也称作P(Y)码2.24精度因子dilution of precision(DOP)描述卫星的几何位置对误差贡献的因子GPS的误差为测距误差与精度因子之乘积2.25几何精度因子geometrical dilution of precision(GDOP)表征卫星几何位置布局对GPS三维位置误差和时间误差综合影响的精度因子2.26位置精度因子positional dilution of precision(PDOP)表征卫星几何位置布局对GPS三维位置精度影响的精度因子2.27高程精度因子vertical dilution of precision(VDOP)表征卫星几何位置布局对GPS高程定位精度影响的精度因子2.28平面位置精度因子horizontal dilution of precision(HDOP)表征卫星几何位置布局对GPS平面位置精度影响的精度因子2.29时间精度因子time dilution of precision(TDOP)表征卫星几何位置布局对GPS时间精度影响的精度因子2.30捕获acquisition用户设备对接收到的GPS卫星信号完成码识别、码同步和载波相位同步的处理过程2.31重捕re-acquisitionGPS接收机因信号遮挡等原因短时间失锁后重新捕获信号的过程一般很快便能完成2.32跟踪tracking对捕获到的GPS卫星信号继续保持码同步和载波相位同步的过程2.33码相位跟踪code phase trackingGPS接收机通过对GPS卫星信号的C/A码或P(Y)码的码相位进行跟踪,以获得GPS伪距测量值的过程2.34载波相位跟踪carrier phase trackingGPS接收机通过对GPS卫星信号的载波相位的跟踪,以获得载波相位测量值的过程2.35载波相位平滑carrier phase smoothing在GPS接收机中利用积分载波相位测量值,以减小由码相位跟踪噪声造成的误差的方法2.36周跳cycle slips在GPS接收机进行载波相位跟踪时,因某种原因产生的整数载波周期跳变2.37伪距pseudorange由GPS接收机测出的卫星信号传播时间而计算出的卫星与接收天线相位中心间的距离2.38距离变化率range rate用测量GPS卫星载波的多普勒频移求得的伪距变化的速率2.39选择可用性selective availability(SA)是美国人为地将误差引入卫星时钟和星历数据中,以降低GPS标准定位服务(SPS)精度的人为措施注:该措施从1990年3月开始实施,2001年5月1日停止使用2.40完好性integrity当无线电导航系统不应当用于导航时向用户及时发出警告(信息)的能力GPS 系统有一定的完好性措施,但对一些应用系统目前的完好性还不够2.41反欺骗anti-spoofing(A-S)GPS卫星信号中用加密码W与P码相叠加使之变为Y码的措施,用于精密定位眼务(PPS)只有具有解密能力的接收机才能利用精密定位服务2.42标准定位服务standard positioning service(SPS)由GPS的C/A码所提供的公开的民用服务2.43精密定位服务precise positioning service(PPS)由GPS的P(y)码所提供的保密服务,仅供美国及其盟国军用或经特许的其他用户使用2.44接收机自主完好性监测receiver autonomous integrity monitoring(RAIM)接收机利用冗余GPS卫星的伪距测量信息以判定GPS系统完好性的方法它能判断可见卫星中是否有卫星出现故障或哪一颗卫星发生了故障并将其排除在导航解之外2.45飞机自主完好性监视airplane autonomous integrity monitoring(AAIM)利用飞企业资产负债表表格下载机上各种导航设备的冗余信息辅助GPS接收机,以提高GPS完好性的一种技术2.46GPS完好性通道GPS integrity channel(GIC)以由多个地面GPS卫星监测台组成的网为基础,提高GPS星座完好性的技术2.47故障检测和排除fault detection exclusion(FDE)在RAIM中,利用冗余GPS卫星的伪距测量信息,具体地判定某一颗卫星不可用而将其从求解组合中排除不用的方法注:当可见卫星为6颗以上时才能作故障检测和排除2.48GPS监测站GPS monitor station在GPS地面控制段中用以对GPS星座的所有卫星进行跟踪测量的设施全球一共设有5个所有监测站收集到的数据传送到主控站,在那里解算出卫星星历和时间的修正参数,然后上行加载到卫星上2.49主机板original equipment manufacture(OEM);engine board是GPS接收机的核心部件包括RF、数字通道、处理器和定位解算软件在OEM基础上,根据不同用户的需求,加上不同的人机界面、天线和外壳结构,可以做成适合不同需要的GPS用户没备2.50C/A码GPS接收机C/A code GPS receiver利用GPS的C/A码进行导航定位的接收机2.51P(Y)码GPS接收机P(Y)code GPS receiver利用GPS的P(Y)码进行导航定位的接收机2.52单频GPS接收机single frequency GPS receiver只能接收GPSL1载频信号而进行导航定位的接收机2.53双频GPS接收机dual frequency GPS receiver能够接收GPS L1、L2信号而进行导航定位的接收机2.54无码GPS接收机codeless GPS receiver在不知道P(Y)码序列的条件下,采用某种信号处理技术获得GPSL1和L2双频信号的测量值,从而具有电离层延迟校正能力的民用双频GPS接收机2.55软件无线电GPS接收机software radio GPS receiver将经天线接收和直接放大后的GPS卫星信号送入高速模/数变换器,其后的全部处理过程由通用数字信号处理器完成的GPS接收机2.56导航型GPS接收机navigational GPS receiver能在动态条件下提供实时定位及其他数据并具有导航功能的GPS接收机2.57测地型GPS接收机geodetic GPS receiver能够提供卫星信号原始观测值用于高精度测量的接收机2.58GPS/GLONASS兼用接收机GPS/GLONASS dual-used receiver能够同时接收GPS卫星和GLONASS卫星信号进行导航定位的接收机2.59测姿型GPS接收机attitude-determination GPS receiver用以测量载体方向、横滚和俯仰等参数的GPS接收机通常由多个GPS接收天线、OEM和相应的处理器组成2.60测向型GPS接收机GPS azimuth-determination receiver用以测量载体方向等参数的GPS接收机,通常由双天线、OEM和相应的处理器组成2.61授时型GPS接收机time transfer GPS receiver专用于精确时间(GPS时或UTC时间)发布的GPS接收机有时还同时输出高稳定度的频率授时精度可以达到或超过40ns2.62定时校频GPS接收机GPS time/frequency receiver同时产生GPS标准秒信号和基准频率的GPS接收机用于对用户的时钟和频率源进行定时和校准2.63单通道GPS接收机single channel GPS receiver采用单个硬件通道,按照一定的时序实现对多颗卫星信号的跟踪并完成定位功能的老式GPS接收机2.64多通道GPS接收机multichannel GPS receiver一个包含多个并行通道的GPS接收机每个通道都能独立连续跟踪一颗或一颗以上卫星2.65GPS数字接收机GPS digital receiver从中频开始进行数字量化处理的GPS接收机2.66GPS模拟接收机GPS analog receiver载波环和码环采用模拟电路实现的老式GPS接收机2.67差分GPS接收机differential GPS receiver能够接收由差分基准站的数据链路发射的差分修正数据,而进行差分导航定位的GPS用户设备,一般包括数据链信号接收机和能利用差修正信息的GPS接收机2.68GPS接收机应用模块GPS receiver application module(GRAM)是一种标准化的美国军用GPS用户设备模块,用于确保军用GPS用户设备的安全性、共用性和互换性2.69GPS天线设备档案表格相位中心GPS antenna phase center指GPS天线的电气中心其理论设计应与天线的几何中心一致2.70GPS接收机噪声GPS receiver noiseGPS接收机噪声是由接收机内部热噪声、通道间的偏差和量比误差等引起的测距和测相误差的综合表征2.71GPS微带天线GPS microstrip antenna一种GPS接收机天线类型由粘接在基板上的特殊设计和精确量裁的金属箔构成2.72冷启动cold startGPS接收机在不知道星历、历书、时间和位置的情况下开机,需要较长时间才能正常定位2.73温启动warm startGPS接收机在不知道星历,但存有历书、时间和位置的情况下开机,达到正常定位的时间比冷启动短2.74热启动hot startGPS接收机在存有星历、历书、时间和位置的情况下开机达到正常定位的时间比温启动短2.75均方根误差root mean square(RMS)表明GPS观测值数据质量的参数,其值越小数据质量越好2.76用户距离误差user range error(URE)用户测量所得的伪距与至卫星真实距离的误差,用均方根值来规定2.77用户等效距离误差user equivalent range error(UERE)根据各种误差源听求得的对用户至卫星距离测量误差的估值2.78GPS导航电文GPS navigation message是由GPS卫星播发给用户的描述卫星运行状态与参数的电文,包括卫星健康状况、星历、历书,卫星时钟的修正值、电离层时延模型参数等内容,以50bps 速率播发2.79转换字hand over word(HOW)GPS导航电文中的转换字载有时间信息,用于在P(Y)码接收机中辅助从C/A 码跟踪状态转换到P(Y)码跟踪状态2.80Z-计数Z-countGPS卫星时钟时间在GPS导航电文中位于每个子帧的第二个转换字(HOW)之前,用29位二进制数表示,单位为1.5s,一个Z-计数为6s2.81差分GPS differential GPS(DGPS)一种提高GPS定位和定时精度的技术在已知点上设置GPS基准接收机,根据由此获得的GPS测量误差产生误差修正量,实时或事后提供给差分GPS用户设备,使用户设备接收并利用修正量以提高其定位精度2.82差分基准站differential reference station差分站differential station设在已知坐标点上的GPS基准接收机连续观测视界内的卫星,产生差分修正量再利用数据链发射台向差分GPS用户设备发送差分修正信息这种固定站称为差分基准站2.83局域差分GPS local area DGPS(LADGPS)用于提高局部区域的GPS定位精度的实时差分GPS系统2.84局域增强系统local area augmentation system(LAAS)利用VHF数据链的局域差分GPS系统,它同时提高GPS定位精度和完好性为飞机精密进近服务2.85位置差分GPS position differential GPS以差分基准接收机提供的位置误差作为修正量的局域差分GPS,它要求基准站GPS接收机和用户接收机使用相同的卫星组进行定位解算2.86伪距差分GPS pseudorange differential GPS以差分基准接收机产生的视界内各颗GPS卫星的伪距误差及其变化率作为修正量的局域差分GPS它不要求基准接收机和用户接收机使用相同的星组2.87载波相位差分GPS carrier phase differential GPS利用基站GPS接收机和用户GPS接收机对多颗卫星信号的载波相位和码伪距的观测量,进行双差分和其他处理,以使用户获得厘米甚至毫米级定位精度的一种相对定位技术2.88实时动态测量系统real time kinematic(RIK)survey system利用数据链将基站GPS接收机的载波相位和码伪距观测量传送给用户,用户接收机采用双差分以及其他处理快速解算出载波整周多值性,以实现动态高精度的实时定位系统2.89EUROFIX系统EUROFIX system以罗兰C作为数据链的局域差分GPS系统2.90连续工作基准站continuously operating reference stations(CORS)互联网差分iso9001质量手册范本GPS internet differential GPS由美国大地测绘局(NGS)、国家海洋和大气局(NOAA)联合建立的GPS增强系统它通过互联网和电话数据包服务,收集来自分布在全国的几百个基准站的码距离和载波相位数据,经中心站处理后再通过互联网,提供给用户,支持GPS 非导航用户和后处理应用,提高GPS定位精度2.91中波数据链差分differential using medium frequency data link利用中波数据链的局域差分GPS2.92海用差分GPS maritime DGPS是一种中波数据链差分GPS用已有的或增强的海用无线电信标台发射信号的副载波作数据链,同时提高水上用户的定位精度和完好性2.93调频数据链差分differential using FM data link利用调频广播副载波作数据链的局域差分GPS2.94全国差分GPS nationwide differential GPS(NDGPS)利用与海用差分GPS同样的体系结构由许多基准站组成,并连同已有的海用差分站,组成覆盖全美国的系统,用于提高GPS定位精度与完好性,为陆上和水上用户服务2.95广域差分GPS wide area DGPS(WADGPS)利用大范围地面分布的GPS基准站收集GPS卫星的数据把伪距误差分解成分量,在整个区域对每一分量进行估计形成修正量,将这些修正量实时传送给GPS用户设备一般由主控站、多个基准站、差分信号播发站、数据通信网络和用户设备组成可用相对较少的基准站提高较广区域的GPS定位精度2.96广域增强系统wide area augmentation system(WAAS)由美国研制的,利用广域差分技术、卫星完好性监测技术和GPS导航信号转发技术,用地球静止卫星作为数据链以GPS L1载频播发这些增强信息用户使用相宜的接收机系统WASS提高GPS的完好性、精度和可用性主要为美国民用航空服务目标是使GPS在整个美国达到飞机I类精密进近的水平2.97欧洲静地星导航重叠服务European geostationary navigation overlay service (EGNOS)欧洲发展的与WAAS相类似的系统和WAAS的主要差别是:它将同时增强GPS和GLONASS系统,覆盖整个欧洲及周边地区2.98多功能交通卫星星基增强系统MTSAT satellite based augmentation system (MSAS)由日本发展的,与WAAS十分类似的系统利用多功能交通卫星(MSAST)播发数据,覆盖日本及其周边洋区2.99星基增强系统satellite based augmentation system(SBAS)利用地球静止轨道卫星播发差分修正及其他信息,以提高卫星导航用户的精度及其性能的广域增强系统2.100陆基增强系统ground based augmentation system(GBAS)利用地面发射台播发差分修正及其他信息以提高卫星导航刚户精度机其他性能的局域增强系统2.101机上增强系统aircraft based augmentation system(ABAS)航空器上利用其他系统获得信息以增强卫星导航用户终端的(定位)性能,或利用它们之间的组合方式共同形成性能增强的导航信息2.102联合精密进近着陆系统joint precision approach and landing system(JPALS)是美国军方正在研制的利用军用信号的差分GPS着陆、着舰系统2.103舰载相对GPS shipboard relative GPS是联合精密进近着陆系统作舰载飞机着舰时的特殊应用方式,为飞机提供相对于军舰的位置2.104GPS现代化GPS modernization为提高GPS系统性能而正在抉行的计划,包括在GPS卫星发射的L2载频上增加调制民用码,增加发射L5载频的民用信号,把军用与民用信号频谱分隔开,在L1、L2上增发军用的M码、增大卫星发射功率和改善地面控制段等措施2.105广域GPS强化wide area GPS enhancements(WAGE)利用GPS卫星同时发播整个星座的伪距修正信息,以提高GPS系统精度的一种方法2.106GPS精度改善创新GPS accuracy improvement initiative(AⅡ)是美国为提高GPS系统精度而正在进行的一项计划,该计划包6s管理检查表括把美国影像和地图绘制局(NIMA)的GPS卫星监测站并入现有监视网络,重新设计主控站GPS中的卡尔曼滤波器以及改善对GPS卫星上行注入方式与能力等三项改善地面控制段的措施2.1073P计划3P program是美国对GPS导航战计划的别称,包括:● 保护(美国及其盟国)在战场上的GPS军事服务;● 防止敌对方对GPS服务的利用;● 维持在战场区域以外的GPS民用服务注:由于保护(protection)、防止(prevention)、维持(preserve)的英文字头均为P,故称为3P2.108导航战navigation warfare(NAVWAR)美国于1996年开始执行的一项军事计划,其目的是提高GPS军用接收机的抗干扰能力,使美军具有在区域的基础上停止GPS民用接收机工作的能力,甚至包括停止其他卫星系统工作的能力2.109GPS接口控制文件GPSICD-200GPS接口控制文件是—个美国政府文件,包括用户与GPS卫星间接口的完整的技术说明2.110海用差分GPS电文格式RTCM SC-104 DGPS message format美国海用无线电技术委员会(RTCM)104专门委员会(SC-104)制定的GPS 差分数据电文格式,在世界范围得到推广应用2.111NMEA-0183美国国家海洋电子协会制定的海用电子设备接口标准及数据格式,许多GPS接收机采用这种标准作为一种数据输入输出格式3 测量特性术语3.11984世界大地坐标系world geodetic system 84WG84坐标系WG84 coordinate system由美国国防部在与WGS72相应的精密星历系统NSWC-9Z-2基础上采用1980大地参考系和BIH1984.0系统定向所建立的一种地心参考系3.2模糊度(多值性)ambiguity当一个接收机对卫星进行连续观测,为重建载波相位的伪距观测值,其中所包含的侍解未知整周数称为整周模糊度值3.3天线高antenna height观测时接收机天线相位中心至测站中心标志面的高度3.4观测时段observation session观测站上开始接收卫星信号到停止接收,连续观测的时间间隔称为观测时段简称时段3.5同步观测simulateous observation两台或两台以上接收机同时对同一卫星进行的观测3.6独立观测环independent observation loop由非同步观测获得的基线向量构成的闭合环3.7单差解single difference solution对两个不同观测站GPS接收机同步观测同一卫星载波相位观测值进行求差的数据处理方法可以消除或削弱GPS卫星钟差、轨道误差、电离层时延和对流层时延3.8双差解double difference solution对两个不同观测站GPS接收机同步观测两颗卫星听得的单差进行求差的数据处理方法,可以消除GPS接收机钟差3.9三差解triple difference solution对两个不同观测站GPS接收机同步观测两颗卫星所得的双差在不同历元进行求差的数据处理方法,可以消除整周模糊度3.10数据剔除率percentage of data rejection删除的观测值个数与应获取的观测值个数的比值3.11扼流圈天线choke ring antenna一种根据L1、L2频率值精心设计的带有多路径抑制槽、可以同时消除L1、L2多路径效应的测量型GPS接收机专用天线,一般用于高精度GPS测量3.12RATIO值RATIO反映GPS整周模糊度解算结果可靠性的参数,其结果取决于多种因素用次最小RMS与最小RMS的比值来表示3.13组合观测值combinative observation由L1、L2载波相位观测值通过一定的数学运算得到的观测值3.14宽巷观测值wide lane observation由L1-L2得到的组合观测值,其波长为86.19cm,有利于求解整周模糊度3.15窄巷观测值narrow lane observation由L1+L2得到的组合观测值,具有比L1、L2都小的观测噪声3.16RINEX格式receiver independent exchange format是GPS原始观测数据的一种通用的存储格式,是ASCII码文本文件,一般由观测数据文件、导航数据文件、气象数井下作业工初级工据文件三种,有特定的文件命名方式其最新版已包括GLONASS数据3.17参考站reference station在一定的观测时间内一台或几台接收机分别固定在一个或几个测站上一直保持跟踪观测卫星,其余接收机在这些测站的一定范围内流动设站作业,这些固定测站就称参考站3.18流动站roxing station在参考站的一定范围内流动作业的接收机所设立的测站3.19GPS静态定位测量static GPS positioning通过在多个测站上进行若干时段同步观测,确定测站之间相对位置的GPS定位测量3.20GPS快速静态定位测量fast static GPS positioning利用快速整周模糊度解算法原理所进行的GPS静态定位测量3.21永久性跟踪站permanent tracking station长期连续跟踪接收卫星信号的永久性地面观测站3.22单基线解single baseline solution在多台GPS接收机同步观测中每次选取两台接收机的GPS观测数据解算相应的基线向量3.23多基线解multi-baseline solution从m(m>3)台GPS接收机同步观测值中,由m-1条独立基线构成观测方程统一解算m-1条基线向量3.24航摄GPS测量参考点reference point for GPS photographic surveying航摄GPS测量中计算动态基线的起算点3.25偏心向量eccentric vector飞机上GPS天线相位中心对航摄仪镜头中心的偏移向量3.26初始基线initialization baseline航摄GPS测量开始之前,参考点和飞机上GPS天线相位中心之间的距离3.27闭合基线closure baseline航摄GPS测量结束后,参考点和飞机上GPS天线之间的距离3.28运动测量kinematic surveying只需短时间的观测资料的连续差分载波相位测量的一种方式操作常数包括确定一已知基线或从一已知基点开始最少跟踪四颗卫星—个接收机应固定安装在一控制点上(已知点上)其他接收机在被测点间移动3.29单点定位point positioning一台接收机单独模式下的地理定位3.30绝对定位absolute positioning定位方式之一,定出某点在某一个特定坐标系上的位置,该坐标系通常是地心坐标系3.31相对定位relative positioning指通过两个站的接收讥同时司步地观测相同卫星来确定两个站的相对位置差的过程这种技术可以消掉两个站的共同误差,比如卫星钟差和预报星历误差,传播延迟等3.32静态定位static positioning一种接收机处在静止或几乎静止情况下的定位3.33动态定位dynamic positioning按时间顺序求解运动中的接收机的坐标每一组坐标只由一次信号取样来确定,且通常进行实时解算4 导航特性术语4.1汽车GPS导航系统in-vehicle GPS navigation system汽车GPS导航系统是以车载GPS接收机为基础,结合其他导航手段获得载体位置数据,并与导航地图数据库相匹配。
GPSS教程.ppt
当然,要达到改动只是局部的需要设计的人有足够的经验,使用对象不能保 证你的程序就是面向对象,初学者或者很蹩脚的程序员很可能以面向对象之虚而 行面向过程之实,这样设计出来的所谓面向对象的程序很难有良好的可移植性和 可扩展性。
3
管理系统手工模拟案例
离散系统举例:
具有一个理发师的理发店是一个典型的排队系统。常称为单
因此, 对于单窗口排队系统,模拟之前应已知: 1.每个顾客的到达时间间隔 A1,A2,A3,…(一般是随机数) 2.每个顾客的服务时间 S1,S2,S3,…(一般是随机数) 3.模拟的顾客数 (模拟长度, 及 START 语句中的参数) 4.模拟的初始条件
Ai, Si 怎么能知道?-- 需要进行输入数据的分析
2
可以明显地看出,面向对象是以功能来划分问题,而不是步骤。同样是绘制 棋局,这样的行为在面向过程的设计中分散在了总多步骤中,很可能出现不同的 绘制版本,因为通常设计人员会考虑到实际情况进行各种各样的简化。而面向对 象的设计中,绘图只可能在棋盘对象中出现,从而保证了绘图的统一。
功能上的统一保证了面向对象设计的可扩展性。比如我要加入悔棋的功能,如 果要改动面向过程的设计,那么从输入到判断到显示这一连串的步骤都要改动, 甚至步骤之间的循序都要进行大规模调整。如果是面向对象的话,只用改动棋盘 对象就行了,棋盘系统保存了黑白双方的棋谱,简单回溯就可以了,而显示和规 则判断则不用顾及,同时整个对对象功能的调用顺序都没有变化,改动只是局部 的。
GPSS复习资料
GPSS复习资料第一章主要考几个概念:1.管理涉及到的关键词:计划、组织、指挥、协调和控制管理四个基本要素:管理主体、管理客体、组织目的、组织环境或条件2.系统定义:多个事物或对象相互关联而形成的统一体;系统特性:整体性( 即1+1 <> 2 )、关联性( 即系统的结构性)、目的性( 或者系统的功能性)、环境适应性贝塔朗菲系统论:整体性、有机关联性、动态性、有序性、目的性(注意与系统特性的区别)分类:主要讲的是连续性系统和离散型系统3.管理系统独有的特性:随机性、动态性、多目标性4.模拟(注意看PPT上的定义)连续型系统称为仿真,离散型系统称为模拟;模拟步骤:(1) 问题描述与系统定义(2) 建立系统模型(3) 收集和整理数据资料(4) 建立模拟模型,设计程序(5) 调试程序,确认模型(6) 实验设计(7) 计算机模拟运行(8) 分析模拟结果(9) 建立文档(10) 实施模拟决策5.GPSS英文全称:Geneal Purpose Simulation System,该语言特别适用于处理出现等待队列的系统第二章Excel:单纯考虑成本不涉及到动作和步骤时用Excel比较简单第三章1.面向对象和面向过程面向过程就是分析出解决问题所需要的步骤,然后用函数把这些步骤一步一步实现,使用的时候一个一个依次调用就可以了。
面向对象是把构成问题事务分解成各个对象,建立对象的目的不是为了完成一个步骤,而是为了描叙某个事物在整个解决问题的步骤中的行为。
2.GPSS语言概述GPSS语言基本格式:地址操作码数据场;注解地址:最多由五个字母, 数字组成, 必须由字母打头. 从第一列开始. 必要时才用GPSS基本模块分类(1) 与活动实体有关的模块A.产生活动实体的模块GENERATE A,B,C,D,E,F,G(分别为:到达间隔时间均值,到达间隔时间方差,第一个动态实体产生的时间,应产生动态实体的总数,优先级)注:必选A或DB.活动实体延时模块ADVANCE A, B(延迟时间均值必选项,延迟时间方差可选项)C.活动实体结束模块TERMINATE A(离开系统的活动实体个数)D.活动实体的转向模块TRANSFER A,B,C,D 注意: A,B,C,D 之间不能有空格A的转向方式:①,逗号(即缺省)为无条件转向B域给出的地址②小数表示去C 域的百分比,1-A 为去 B 址的百分比, 通路是随机的。
离散系统仿真软件GPSSJAVA介绍

多服务台: 多服务台: storage
属性:返回当前容量、当前剩余容量,当前总进入数, 属性:返回当前容量、当前剩余容量,当前总进入数,当前最 大服务容量,当前平均利用率、 大服务容量,当前平均利用率、平均服务时间 方法:加入、 方法:加入、离开队列
时间推进、 时间推进、 事件调度
队列实体: 队列实体: Queue
2010-11-12
GPSS简介 简介
GPSS的全称是General Purpose Simulation System,GPSS 诞生于上个世纪60年代,是专门为管理人员设计的一门用 于离散系统建模的语言。它采用面向业务流程的建模方法, 很贴近于现实管理系统的实际业务流程,模型中仿真元素 之间的联系与实际系统的元素及相互作用有很直观的映射, 模型直观且易于理解。 • 作为一门离散系统仿真的专用计算机语言,gpss优势在于: – Gpss仿真系统解放了建模者,它将解决某一问题的计 算模型与算法分离,使建模者将注意力集中在解决问 题的建模、实验与结果的验证与分析的业务层面,而 不需要在仿真算法与运行机制等方面花费精力与时间。 – Gpss模型贴近于现实管理系统的各种实际业务流程, 仿真元素之间的联系与实际系统中元素之间的相互作 用关系有很直观的映射。
2010-11-12 2
管理(离散) 管理(离散)系统仿真简介
• 离散事件系统是指那些系统状态只在一些随机的时间点上 由于某种事件的驱动而发生变化的系统。 由于某种事件的驱动而发生变化的系统。这类系统的状态 变量在两个事件之间保持不变, 变量在两个事件之间保持不变,只有当某个事件发生时才 发生变化,所以一般称之为离散事件系统。 发生变化,所以一般称之为离散事件系统。它最主要的特 点是系统的状态呈动态、离散性变化, 点是系统的状态呈动态、离散性变化,系统中包含随机因 包含排队环节。例如交通管理、自动生产线、 素,包含排队环节。例如交通管理、自动生产线、计算机 网络和社会经济系统都是离散系统。 网络和社会经济系统都是离散系统。 • 为了充分挖掘这些离散系统的运行效率,就需要对这些离 为了充分挖掘这些离散系统的运行效率, 散事件系统建立计算机模型,并在计算机上进行模拟, 散事件系统建立计算机模型,并在计算机上进行模拟,以 找出影响系统效率的瓶颈所在, 找出影响系统效率的瓶颈所在,充分挖掘这些离散系统的 潜能。 潜能。 • 系统仿真能一一仿效实际系统的各种动态活动,并把系统 系统仿真能一一仿效实际系统的各种动态活动, 动态活动过程的瞬间状态记录下来, 动态活动过程的瞬间状态记录下来,最终得到用户所关心 的系统统计性能。在西方, 的系统统计性能。在西方,它已成为各种定量分析技术中 应用最广泛的一种。 应用最广泛的一种。而管理仿真决策支持系统正是在计算 机仿真发展的基础上,由管理工程、系统工程、 机仿真发展的基础上,由管理工程、系统工程、应用数学 和计算机科学相结合而成的, 和计算机科学相结合而成的,它对于辅助经济和管理决策 具有非常重要的作用,并逐渐被越来越多的人们所重视。 具有非常重要的作用,并逐渐被越来越多的人们所重视。
gpss课件

6-2
LOOP 循环模块
中级GPSS
语言模块
循环是各类程序编制中所不可缺少的。 循环是各类程序编制中所不可缺少的。GPSS 语言的 循环过程是由LOOP模块完成的。 LOOP模块完成的 循环过程是由LOOP模块完成的。GPSS 语言的循环过程是 由计数和转向二个动作完成,它总是先确定循环次数, 由计数和转向二个动作完成,它总是先确定循环次数,并 将循环次数存在活动实体的某个参数中, 将循环次数存在活动实体的某个参数中,然后当活动实体 进入LOOP模块后,就开始了循环的进程.循环模块LOOP LOOP模块后 LOOP的 进入LOOP模块后,就开始了循环的进程.循环模块LOOP的 基本格式是: 基本格式是:
QUEUE MAXIMUM AVERAGE TOTAL ZERO PERC. AVERAGE $AVERAGE TABLE CONTENT CONTENT ENTRIES ENTRIES ZERO TIME/TR TIME/TR NUMBR GENQ SPECQ 3 1 0.76 0.28 48 13 9 6 18.75 46.15 8.54 11.77 10.51 21.86
6-1 一家电修理部模型的建立及其模拟
模拟输出结果
FACILITY AVERAGE NUMBER UTILIZATION ENTRIES 0.93 47 AVERAGE SEIZING PREEMPTING TIME/TRAN TRANS.NO. TRANS.NO. 10.66 HANDYM
STORAGE CAPACITY AVERAGE AVERAGE ENTRIES AVERAGE CURRENT MAXIMUM CONTENT UTILIZ. TIME/TR CONTENT CONTENT SPCLST 2 1.00 0.71 13 58.85 2 2
GPSS语言

GPSS语言GPSS(Geneal Purpose Simulation System)是使用比较广泛的面向离散模型的模拟语言。
该语言特别适用于处理出现等待行列的系统,它提供了多种形式的实体、块语句、定义语句、控制语句、模拟操作语句等等,可以实现高难度的程序设计。
“GPSS的全部目的就是为了预测现实世界中复杂系统的行为——过去许多代价高昂的项目之所以失败是因为对最终的结果缺乏精确的预见。
” GPSS的研制者在介绍GPSS时如是说。
下面先从一个简单的例子出发,对GPSS的建模过程进行一个总体概略的介绍。
随后将详细介绍GPSS的运行环境、界面和模块体系结构,并对GPSS的建模观点进行评述,最后再以一个研究示例说明GPSS在实际研究中的应用。
一、一个简单的GPSS例子假设顾客去理发店理发。
店里只有一个理发员JOE,顾客排队等着,前一个理完发,后一个就可以去理。
设顾客平均18分钟来一个,不过有士6分钟的偏差,也就是说在12分钟到24分钟之内,即12,13,…,24分钟都等可能有顾客到来。
理发员理发时间是16土4分钟,下面是模拟系统的运行情况。
SIMULA TEGENERA TE 18,6 顾客在(18f6)分钟的时间间隔到来QUEUE LINE 顾客排入名为LINE的队中SEIZE JOE 或JOE闲,找他理发,否则停在队中DEPART LINE 离队ADV ANCE 16,4 理发花了(16±4)分钟RELEASE JOE 理发完毕离开TERMINA TE 顾客离开系统START 25END首先,在每个GPSS程序的开始,有一个控制语句:S[MU-LA TE。
它表示一个模拟过程的开始,同样,在整个程序的最后,有一个END控制语句,与SIMULA TE相对应,表示模拟过程的结束。
这个进程说明从GENERA TE所产生的顾客进入理发店,找JOE理发,理完后离开理发店。
JOE开始时是闲的。
有人找J(3E理发,如果他是闲的,他就为顾客理发;如果他是忙的,就让顾客排人LINE中。
离散系统仿真语言GPSSJAVA的进一步研究与开发

离散系统仿真语言GPSS/JA V A 的进一步研究与开发任 毅,孙 健(北京工业大学实验学院,北京 100024)摘 要:GPSS 是一种应用于离散系统仿真的专用语言,在管理系统定量化决策分析中广为应用。
作者在以前工作的基础上,对其所开发的GPSS/JA V A 做了进一步的改进和完善。
本文简要介绍了改进后系统的性能和特点;对系统新的结构组织以及设计思想进行了比较详尽的阐述,最后用新的系统对一个公交车站进行了模拟,从而展示了改进以后系统的风格和特点。
关键词:离散系统仿真;系统仿真;GPSS ;仿真语言【作者简介】任 毅,教授;研究方向:决策支持系统、人工智能、系统仿真、计算机应用。
孙 健,助教;研究方向:管理信息系统,系统仿真。
1. 引 言经过进一步的研究和开发,作者对GPSS/JAVA 做了如下的改进与完善:(1) 系统结构的重新组织:将所有的后台支持类组织在一个名为gpssjv 的包中;(2) 对用户模型的程序界面做了进一步的改进,为用户模型程序的编辑和调试提供乐方便;(3) 将原来一步完成的系统初始化工作分为两步进行,使得模拟过程中随机数流能够保持完整性;(4) 增加了异常捕捉机制,使GPSS/JAVA 能够自动检查用户模型程序中的错误和捕捉在模型程序初始化过程以及运行过程中产生的各种异常;(5) 增加了若干新的模块,如link 、unlink 、preempt 、return 等。
(关于GPSS/JAVA 原系统的介绍请参考文献[1])2. GPSS/JAVA 的特点GPSS (General Purpose Simulation System )是专用的离散系统仿真语言,以简洁易用和灵活通用著称。
但是该语言的计算功能有限,可扩展性差,不便与其他语言混合编程。
JAVA 作为一种杰出的面向对象程序设计语言,正在被越来越多的工程技术人员所掌握,GPSS/JAVA 不但保持了传统GPSS 的语法特点,而且允许与Java 语言混合编程,因此它不但拥有通用计算机语言强大的计算功能,而且还拥有GPSS 建模的方便和快捷等特性。
必掌握的GPSS语言
与活动实体有关的模块1.GENERATE(产生活动实体的模块)GENERATE模块的基本格式如下:GENERATE A,B,C,D,E,F,G其中数据域中各个数据的含义如下:A:活动实体产生(或到达)的间隔时间均值。
(整数)B:活动实体产生(到达)的间隔时间方差或为函数修正,默认为零。
(整数)如果B不是函数的标准属性码,则生成时间间格在(A+B)到(A-B)之间的一个随机数,如果B 域是一个函数的标准属性码,则活动实体生成的随机间格是由A域的值乘以B域函数的值决定的。
C:第一个活动实体产生的时间。
缺省是模拟钟从零算起。
D:应产生的活动实体的总数。
缺省无限制E:被产生活动实体的优先级,1~127。
缺省为1.F:活动实体携带参数的个数,默认值是12。
G:参数类型,默认为半字节参数。
用F表示全字节参数,用H表示半字节参数,默认时为半字节参数。
如果C值是默认的,则说明第一个活动实体是从模拟钟零时开始,经过一个时间间隔A 后产生。
2. ADV ANCE (活动实体的延时模块)活动实体在系统中运动、停留、接受服务等过程都需要延时,这可以用此模块实现。
ADV ANCE模块的数据域内仅有两个数据,均表示延迟时间的统计特性。
它的基本格式如下:ADV ANCE A,B其中:A为延迟时间的均值。
B为延迟时间的方差。
ADV ANCE模块的示例如下:ADV ANCE 18,6 延迟时间的均值为18,方差为6。
ADV A 25 延迟时间均值为25,方差为0。
3. TRANSFER(活动实体的转向模块)如同各类高级语言具有转向语句,GPSS语言也有类似的转向模块。
GPSS语言的转向模块也分为无条件转向模块和有条件转向模块。
活动实体转向模块是TRANSFER,其语句的书写格式为:TRANSFER A,B,C其中:A为转向方式,有三种情况:,:逗号为无条件转向B域给出的地址。
BOTH:先企图进入B域地址,不成就去C域地址,两个地址都不通,就保留在此模块中。
基于GPSS语言的《管理系统模拟》课程教学初探

8 ・ 6
维普资讯
专业学生而言 , 情形正好相反 。而《 管理 系统模
入蒙特卡罗 ( C 解题 方法 , M ) 使学 生掌握模拟 技
术解决确定性问题 、 动态问题的方 法。再简单介 绍连续型系统模拟和 系统 动力学解 题 的一般 方
法, 在此 基础 上 , 剖 分析 离散 系统 模拟 的典 型 例 解
在现代信息技术高度发达 的今天 , 需要大量 信息资源开发 和管理的专业 技术人 才, 高校 “ 信 息管理与信息系统” 专业 对于培养这方 面的专业 人才而言有着非常重要 的作用 。“ 信息 管理 与信
很好 的选择 。《 管理系统模拟》 课程的教学 , 必须
根据“ 信息管理与信息系统” 专业和 G S 模 拟语 PS 言特点 , 从教学 目标 、 教学内容和教学方法等方面
与信息技术( 计算机模拟技术) 有机结合, 从而实现课程的教学 目标。课程教学内容设计应按照管理系统模拟
研 究的 实际过程 、 模拟技 术的运用 、 计算机模 拟工具 的特 点等加 以组织 , 并通过综合运 用案例教 学方 法、 合理安
排计算机模拟 实验等 采实现教 学方法的创新 。 关键词 :管理 系统模拟 ; P S 案例 教学 ; G S; 课程教 学 ; 模拟技 术 中圈分类号 : 6 24 G 2. 文献标识码 : A 文章编号 : 0 4— 0 X(( 6 0 10 0 3 2J )2—0 8 0 o 0 6— 3
维普资讯
20 06年 4月
2 8卷 第 2
江 苏 大 学 学 报( 教 研 究 版 ) 高 Junlo i gu U i ri ( ihr d ct nS d dt n o ra fJ ns nv sy H ge uai t yE io a e t E o u i
GPS-协议简体中文文档-nmea-0183-format-v
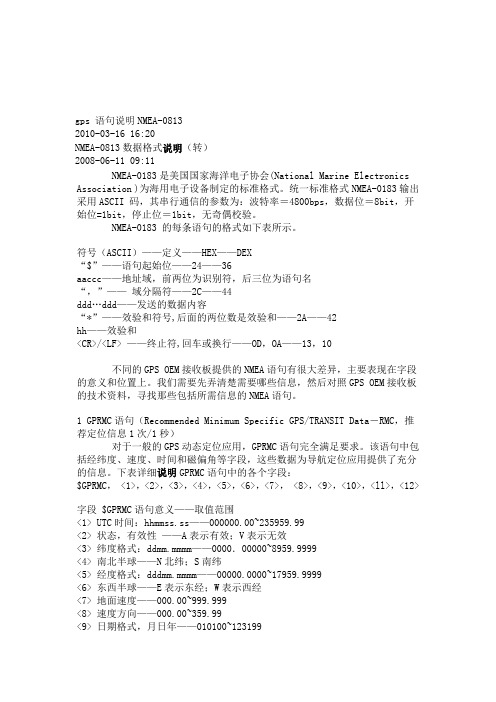
gps 语句说明NMEA-08132010-03-16 16:20NMEA-0813数据格式说明(转)2008-06-11 09:11NMEA-0183是美国国家海洋电子协会(National Marine Electronics Association )为海用电子设备制定的标准格式。
统一标准格式NMEA-0183输出采用ASCII 码,其串行通信的参数为:波特率=4800bps,数据位=8bit,开始位=1bit,停止位=1bit,无奇偶校验。
NMEA-0183 的每条语句的格式如下表所示。
符号(ASCII)——定义——HEX——DEX“$”——语句起始位——24——36aaccc——地址域,前两位为识别符,后三位为语句名“,”——域分隔符——2C——44ddd…ddd——发送的数据内容“*”——效验和符号,后面的两位数是效验和——2A——42hh——效验和<CR>/<LF> ——终止符,回车或换行——OD,OA——13,10不同的GPS OEM接收板提供的NMEA语句有很大差异,主要表现在字段的意义和位置上。
我们需要先弄清楚需要哪些信息,然后对照GPS OEM接收板的技术资料,寻找那些包括所需信息的NMEA语句。
1 GPRMC语句(Recommended Minimum Specific GPS/TRANSIT Data-RMC,推荐定位信息1次/1秒)对于一般的GPS动态定位应用,GPRMC语句完全满足要求。
该语句中包括经纬度、速度、时间和磁偏角等字段,这些数据为导航定位应用提供了充分的信息。
下表详细说明GPRMC语句中的各个字段:$GPRMC, <1>,<2>,<3>,<4>,<5>,<6>,<7>, <8>,<9>,<10>,<ll>,<12>字段 $GPRMC语句意义——取值范围<1> UTC时间:hhmmss.ss——000000.00~235959.99<2> 状态,有效性——A表示有效;V表示无效<3> 纬度格式:ddmm.mmmm——0000.00000~8959.9999<4> 南北半球——N北纬;S南纬<5> 经度格式:dddmm.mmmm——00000.0000~17959.9999<6> 东西半球——E表示东经;W表示西经<7> 地面速度——000.00~999.999<8> 速度方向——000.00~359.99<9> 日期格式,月日年——010100~123199<10> 磁偏角,单位:度——00.00~99.99<ll> 磁偏角方向——E表示东;W表示西<12> 模式指示及校验和—— A=自主定位,D=差分,E=估算,N=数据无效例如:$GPRMC,074529.82,A,2429.6717,N,11804.6973,E,12.623,32.122,010806,,W, A*082 GPGGA语句(Global Positioning System Fix Data-GGA,GPS定位信息, 输出1次/1秒)GPS定位主要数据,该语句中包括经纬度、质量因子、HDOP、高程、基准站号等字段。
第3讲 GPSS初级
求解:
窗口的平均排队长度 顾客的平均等待时间
9
例3.1: 只有一个理发师的理发店模型 (单窗口排队系统 框图式和图解式模型)
到达 排队
到 达
空闲 ?
服 务
离 开
服务台
服务
排 队
离开
10
解:
平均排队长度 = 排队面积求和/模拟时间
平均等待时间 = 各顾客等待时间求和/模拟的顾客数
我们上课应用的是 GPSS World. 是由密尼特曼软件公司( Minuteman Sofeware ) 开发的. 它将原来的 DOS 界面升级为 Windows 界面.
( 有需要的同学可去官网 版做学习用。 )
下载免费的学生
1
3.1 离散事件系统的基本要素
T0 S0
∆T
∆T
∆T
∆T
∆T
S1
S2
S3
S4
6
(2)变步长推进法
变步长推进法,即事先没有确定时钟推进步长,而是根据随机事 件的发生而进行随机步长的推进,推进的步长为最后已发生事件 与下一事件之间的时间间隔。 由于离散事件系统的状态多数是随时间离散变化的,在模拟时不 需要考虑那些没有发生状态变化的时段。因此,这种变步长的推 进方法,其节奏性与系统状态变化更加吻合。(在我们这门课的 学习中所涉及的模型,都属于变步长推进法)
1.理发师状态,忙或 闲,可用0,1表示 2) 参数: 表征各种系统变量的值。即某一时间点上系统 2.排队长度 3.各顾客到达时间 变 4.各顾客服务时间 量的某一特定值 5.模拟钟时间
3) 系统的状态: 某个指定时刻, 所有系统变量的集合。 4) 事件: 导致系统状态发生变化的过程。不引起系统 状态变化的过程不称为事件。在本例中,顾
第2讲 管理系统模拟与GPSS

系统可以按照不同的标准进行不同的分类,主要有: 系统可以按照不同的标准进行不同的分类,主要有: ——确定性系统与随机性系统; 确定性系统与随机性系统; 确定性系统与随机性系统 ——连续性系统与离散性系统; ( 本课程主要讨论类型 ) 连续性系统与离散性系统; 连续性系统与离散性系统 ——简单系统与复杂系统; 简单系统与复杂系统; 简单系统与复杂系统 ——线性系统与非线性系统; 线性系统与非线性系统; 线性系统与非线性系统 ——自然系统与人工系统; 自然系统与人工系统; 自然系统与人工系统 ——开放系统与封闭系统; 开放系统与封闭系统; 开放系统与封闭系统 ——静态系统与动态系统, 静态系统与动态系统, 静态系统与动态系统 等等 根据待分析系统状态变化的连续性,可将其分为 类 离散系统,连续系统 连续系统, 根据待分析系统状态变化的连续性 可将其分为3类: 离散系统 连续系统 可将其分为 混合系统. 相应地, 可将模拟分为离散系统模拟, 连续系统模拟,混合系统模拟 混合系统 相应地 可将模拟分为离散系统模拟 连续系统模拟 混合系统模拟 三种类型. 三种类型 对离散系统而言,模拟时间可以是离散的 也可以是连续的.但与影响系统 模拟时间可以是离散的,也可以是连续的 对离散系统而言 模拟时间可以是离散的 也可以是连续的 但与影响系统 状态变化过程有关的具体模拟时间是离散的. 状态变化过程有关的具体模拟时间是离散的 本门课程主要研究对象是管理系统,而管理系统大多是离散的 而管理系统大多是离散的, 本门课程主要研究对象是管理系统 而管理系统大多是离散的 所以本课 程主讨论离散型模型, 进行讨论. 程主讨论离散型模型 并用 GPSS ( 面向离散型模型的模拟语言 ) 进行讨论
9
管理系统模拟的实现方式
一、利用通用高级语言进行模拟
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(2)函数定义语句 用户定义的函数的基本格式如下: 函数名 FUNCTION A,B(定义行) X1,Y1/ X2,Y2/ X3,Y3 /X4,Y4……(数据行) 其中: A 表示函数的自变量, B 表示函数类型及其点数,具体有以下几种: (a)Cj j点连续型 例如:RATE FUNCTION RN2,C3 0.0,0.0/0.19,2.5/0.59,16.1 这是一个3点连续型函数,当自变量RN2分别为0.0, 0.19,0.59时,因变量RATE分别为0.0,2.5,16.1。 自变量在中间值时,取线性插值。 (b)Dj j点离散型
编程举例
例1:有一个理发店,只有一位理发师,顾客以每隔 16±9分钟的速度到达,理发师的理发时间为15±7分 钟,请模拟20个顾客的系统运行情况,估算顾客在理 发店的平均逗留时间。 GENERATE QUEUE SEIZE ADVANCE RELEASE DEPART TERMINATE START 16,9 Q_BAR S_BAR 15,7 S_BAR Q_BAR 1 20
Normal——正态分布函数 语法结构如下: Real = NORMAL( Stream, Mean, StdDev ) 其中: Stream:由正整数表示的随机数发生器,可取任意正整 数; Mean:正态分布的均值; StdDev:正态分布的标准差。 函数返回值为实数 例: ADVANCE (Normal(1,500,15)) ;以500为均值,225 为方差的正态分布
例:DDD FUNCTION PH1,D4 -2.0,16/-1.3,11/0.7,9/12.0,0
这是一个4点离散型函数。 当自变量PH1取(-∞,-2.0]时,函数DDD取16; PH1取(-2.0,-1.3]时,函数DDD取11; PH1取(-1.3,0.7]时,函数DDD取9; PH1取(0.7,12.0]时,函数DDD取0。 (c)Lj j点列表型函数,自变量为自然数,每一自变量对 应一个函数值
例: INITIAL MX$DEAL(2,3),20 表示给名为DEAL的矩阵的第2行第3列赋值为20。 INITIAL LS1 ;将1号逻辑开关的初值置为1 INITIAL X1,5 ;将1号保存值的初值置为5
GPSS中常用的几个内置函数 Exponential——指数分布函数 语法结构如下: Real = EXPONENTIAL( Stream, Locate, Scale ) 其中: Stream:由正整数表示的随机数发生器,可取任意正整 数; Locate:指数分布的偏移值,实数; Scale:指数分布的压缩或扩张系数,必须是正实数。 函数返回值为实数。 例: ADVANCE (Exponential(1,0,10)) ;均值为10的指数分 布
三、GPSS的系统数字属性(SNA)与定义语句
1.GPSS的系统数字属性(SNA) 通过系统标准数字符属性码便可以随时获得系统中一些 实体的状态值,SNA码可能返回一个数值或字符串,并且可 以在GPSSWorld语句中加以运用。 常用的SNA码有:
C1 Pj Vj FNj Qj RNj Sj
模拟钟当前时间 动态实体所带的第j号参数 第j号自定义变量值 第j号自定义函数值 第j号队列的当前长度 第j号随机数发生器 第j号存储器的现存货量等。
(3)RMULT说明语句
其功能是给一个或几个随机数发生器赋种子值。 基本格式:RMULT A,B,C,D,E,F,G 例如: RMULT ,,111表示为第3个随机数发生器赋种子值111。 (4)存储器定义语句 其基本格式为:存储器号或名称 STORAGE 存储器容量 例如:1 STORAGE 100 常用的与存储器有关的SNA有: Sj:存储器j的当前含量; Rj:存储器j当前的剩余容量; (5)符号定义语句 将表达式的值赋给变量,基本格式如下; 变量名 EQU 表达式或数字
(6)矩阵定义语句 基本格式:NAME MATRIX A,B,C 其中: NAME为矩阵名; A,保留,不用; B为矩阵的行数;C为矩阵的列数 例:MMX MATRIX ,5,5 定义了一个5×5的矩阵 (7)INITIAL说明语句。 其功能是赋初值,基本格式:INITIAL A,B 其中:A 保存值名或矩阵名或开关号。 若是初始化逻辑开关,则必须为LSj或LS$Name, 它表示将逻辑开关的状态置为1;若是初始化保存值, 则必须Xj或X$Name; B:若是初始化逻辑开关则此操作数是不需要的,若是初 始化保存值,B域的值就是要初始化保存值的值
FACILITY BARBER QUEUE LINE ENTRIES UTIL. AVE. TIME 11 0.920 386.71 AVAIL. 1
MAX CONT. ENTRY ENTRY(0) AVE.CONT. AVE.TIME AVE.(-0) 5 15 1 2.536 781.538 837.363
例2: 有一个理发店,只有一位理发师,顾客以 每隔16±9分钟的速度到达,理发师的理发时间为 15±7分钟,请仿真8小时的运行情况,估算理发 师的利用率和顾客的平均等待时间。 GENERATE QUEUE SEIZE DEPART ADVANCE RELEASE TERMINATE GENERATE TERMINATE START 16,9 Q_BAR S_BAR Q_BAR 15,7 S_BAR 480 1 1
二.GPSS控制语句 (1) START:仿真开始命令 其功能是控制模拟过程的终止或部分输出内容, 基本格式:START A,B,C,D 其中:A 表示仿真运行次数,整数 B 表示要求输出仿真数据,若不需要,则用NP。 不写B的信息时,默认为输出一个标准格式的GPSS报告 C 保留,一般不用 D 是否输出事件链,若为1则表示在标准输出中包 括当前事件链和未来事件链,否则不输出此两链。
例3:(并联排队系统) 一个理发店,有 两位理发师 A 和 B ,顾客到达的时间间隔为 25±10 分钟。顾客到达理发店后优先选择 理发师 A ,若 A 忙则选择理发师 B ,若 B 也忙, 则排队等待。两位理发师的服务时间为 35±15 分钟,请仿真服务 1000 个顾客的运 行情况。统计A,B两个理发师的利用率。
例:MD
FUNCTION
XX1,L7
1,1/2,4/3,9/4,16/5,25/6,36/7,49
(d)Ej j点离散特征值型函数,自变量为数值, 因变量可以为系统数字属性或表达式。 例:FAST FUNCTION P1,E4 5,V1/10,V2/15,V3/50,FN3 表示当自变量P1≤5时,函数FAST 的值取V1;当5< P1≤10时,函数FAST 的值取V2,依此类推。 (e)Mj j点特征值列表型函数,自变量为自然数, 因变量可以为系统数字属性或表达式。 例:LIST FUNCTION P2,M5 1,V1/2,V2/3,FN3/4,X1/5,X2 表示当自变量P2=1时,函数LIST 的值取V1;当P2=2 时,函数LIST 的值取V2,依此类推。
ASSIGN …. LP …… ….. …. LOOP
1,5 ;
1号参数赋值为5,设定循环次数
1 ,LP
;循环计数
例: GENERATE 300,100 ;Create next customer. QUEUE line ;Begin queue time. SEIZE Barber ;Own or wait for barber. DEPART line ;End queue time. ADVANCE 400,200 ;Haircut takes a few minutes. RELEASE Barber ;Haircut done. Give up the barber. TERMINATE 1 ;Customer leaves.
(2)RESET:消除累积统计 其功能是将统计单元的值恢复至0,但系统中表示工作状 态的值仍保留不变, 基本格式: RESET (3)CLEAR控制语句: 其功能是清零,使系统恢复到未运行状态。 基本格式: CLEAR (4)LOOP循环模块: 其功能是控制循环,基本格式: LOOP A,B 其中:A 为参数名,该参数存储循环次数 B 当A域的值大于零时,活动实体应转去的语句标 号,同时将A的值减1。
GENERATE TRANSFER ADD_A SEIZE ADVANCE RELEASE TERMINATE ADD_B SEIZE ADVANCE RELEASE TERMINATE START
25,10 BOTH,ADD_A,ADD_B ;实现理发师的选择 F_A ;占用理发师A 35,15 F_A 1 ;离开系统,确保不进入下一模块 F_B ;占用理发师B 35,15 F_B 1 1000 ;A,B理发师理发总数目
Poisson——泊松分布函数
语法结构如下: Integer = POISSON( Stream, Mean ) 其中: Stream:由正整数表示的随机数发生器,可取任意正整 数; Mean:泊松分布的均值; 函数返回值为整数。
2.GPSS的定义语句 (1)变量定义语句 定义变量的关键词是VARIABLE,其基本格式如下; 变量号(或变量名) VARIABLE 公式 例:NAME VARIABLE 2*P1 表示将活动实体的1号参数的值乘上2后成为变量NAME的值。 对变量引用时在变量名前缀以V$,如ADVANCE V$NAME 另:对一个布尔变量定义格式为: 变量号(或变量名) BVARIABLE 布尔表达式 表达式为真,变量取值为1,否则取值为0.