自动变速器TCU开发解决方案
ESC相关EMS及TCU标定开发流程规范

汽车工程研究院文件签发:ESC相关EMS及TCU标定开发流程规范目录一、适用范围二、关联系统、零件清单三、术语和定义四、系统功能描述五、信号定义六、各部门职责分工七、功能规范开发计划出自XXX 编号生效日期版次第1版1适用范围适用于XXXX汽车工程研究院所有的带ESC功能的发动机系统电控装置ECU和变速箱系统电控装置TCU 的标定开发设计。
2关联系统、零件清单ESC。
3术语和定义下列术语和定义适用于本规范。
3.1 EMSEMS(Engine Management System),由各种传感器、执行器和控制单元(ECU)组成用于发动机管理的系统。
3.2 ECUECU(Engine Control Unit),发动机控制单元,搜集各类传感器信号,经过ECU处理,发出控制信号到执行器,保证发动机正常有效运行。
此外还有故障诊断和处理以及自适应等功能。
3.3 TCUTCU(Transmission Control Unit),变速箱控制单元,用于自动变速箱中,控制变速箱的档位策略并执行换挡机构控制,此外还有故障诊断和故障处理等功能。
3.4 ESCESC(Electronic Speed Controller),车身电子稳定控制系统,此功能通过搜集转向行驶时横摆率传感器、侧向加速度传感器和方向盘转角传感器信号,通过ECU控制前后、左右车轮的驱动力和制动力,确保车辆行驶的侧向稳定性。
4系统功能描述ESC(Electronic Speed Controller),车身电子稳定控制系统,此功能通过搜集转向行驶时横摆率传感器、侧向加速度传感器和方向盘转角传感器信号,通过ECU控制前后、左右车轮的驱动力和制动力,确保车辆行驶的侧向稳定性。
ECU需要对ESC的升降扭请求进行响应,TCU需要对ESC的锁档请求进行响应(如果需要)。
5信号定义5.1硬线信号无。
5.2CAN总线信号说明:T:Transmit R:Receive输入信号:ESC1:SignalNameNodelistComment EMSTCUESPFLWheelSpeedValidData R R T Quality/fault information to current wheel speed information of front left wheel.FLWheelSpeed R R T Current wheel speed information of front left wheel.For ABS the valid range high is 260,but for ESP the valid range high is 360FRWheelSpeedValidData R R TFRWheelSpeed R R T Current wheel speed information of front left wheelFor ABS the valid range high is 260,but for ESP the valid range high is 360ESC_AutoHoldAvailable R TESC_AutoHoldActive R R TVehicleSpeedVSOSig R TNote:it will be ox 1FFF when the value is more than 260 Km/h VehicleSpeedVSOSigValidData R TABS_Active R T Indication that ABS system currently performs a brake interventionABS_Fault R T ABS system has detected a failure which does not allow a reliable ABS regulation and is therefore switched offMessageCounter R R TCheckSum R R T checksum = (Byte0+Byte1 …+ Byte6) XOR 0xFF ESC2:SignalName Nodelist CommentESC3:ESC4:输出信号:EMS1:EMS2:EMS3:TCU1:注:以上CAN message为当前项目所使用信号列表,后续如有变更,需要在此规范中进行同步变更。
汽车无级变速箱控制器tcu的研究【最新】

汽车无级变速箱控制器TCU的研究来源:中国电源网/王旭东闫维新张仁海樊春梅2006-01-18为了跟踪世界汽车技术,发展我国汽车工业,“九五”期间,汽车电于控制技术被列为科技攻关项目。
车辆自动变速是汽车电控技术的一个重要组成部分。
采用计算机和电力电子驱动技术实现车辆自动变速,能消除驾驶员换档技术的差异,减轻驾驶员的劳动强度,提高行车安全性,提高车辆的动力性和经济性。
汽车的无级变速系统一般是由无级变速箱CVT(Continuously Variable Transmission) 和无级变速箱控制器TCU(Transmission Control Unit)组成。
1 CVT的基本结构汽车的无级变速系统主要有以下几种形式:(1)液力机械AT—HMT(Hydrodynamic Mechanical Transmission)广泛应用于轿车、公共汽车、重型车辆、商用车和工程车辆上。
(2)机械式AT—AMT(Automated Mechanical Transmission)在通常机械式变速器基础上加上微机控制电液伺服操纵自动换档机构组成,目前它应用于部分低档轿车、局部卡车和商用车上。
(3)无级式AT—CVT(Continuously Variable Transmission)是目前在小排气量轿车中使用最多的一种。
它的主要结构和工作原理如图l所示。
图1 无级式AT—CVT主要结构和工作原理CVT技术的发展,已经有了一百多年的历史。
德国奔驰公司是在汽车上采用CVT技术的鼻祖,早在1886年就将V型橡胶带式CVT安装在该公司生产的汽油机汽车上。
但由于结构设计和选材等方面的问题,该传动机构体积过大,传动比过小,无法满足汽车行驶的要求。
这些缺点限制了它的应用。
直到1979年,通过结构的改进和特殊钢带的使用,CVT的传动比明显提高,具备了在车辆上广泛应用的前提条件。
从那时起,福特、菲亚特和日产等公司的车型都曾采用过这种变速传动机构。
TCU控制策略

TCU速比控制策略
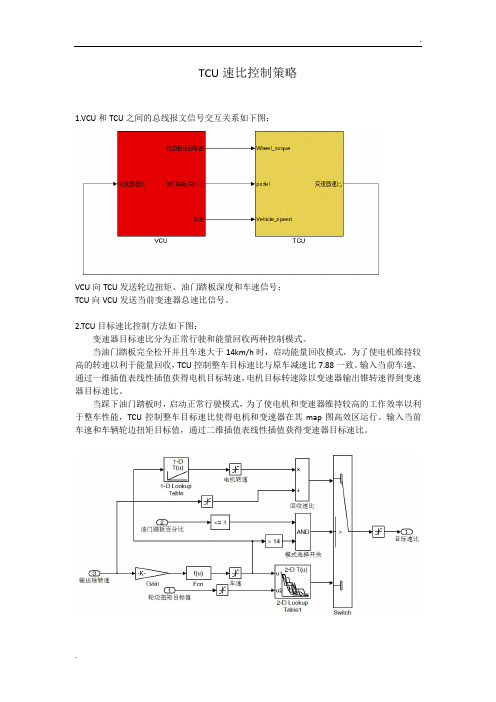
1.VCU和TCU之间的总线报文信号交互关系如下图:
VCU向TCU发送轮边扭矩、油门踏板深度和车速信号;
TCU向VCU发送当前变速器总速比信号。
2.TCU目标速比控制方法如下图:
变速器目标速比分为正常行驶和能量回收两种控制模式。
当油门踏板完全松开并且车速大于14km/h时,启动能量回收模式,为了使电机维持较高的转速以利于能量回收,TCU控制整车目标速比与原车减速比7.88一致。
输入当前车速,通过一维插值表线性插值获得电机目标转速,电机目标转速除以变速器输出锥转速得到变速器目标速比。
当踩下油门踏板时,启动正常行驶模式,为了使电机和变速器维持较高的工作效率以利于整车性能,TCU控制整车目标速比使得电机和变速器在其map图高效区运行。
输入当前车速和车辆轮边扭矩目标值,通过二维插值表线性插值获得变速器目标速比。
基于HiL实时联合仿真自动变速器控制系统TCU快速开发研究

性 要求极 高 , 由此 带来 了其控 制系统 设计 的复杂 性 : 从 系统架 构 设计 , 个功 能 的开 发 、 单 测试 , 软件 集 到 成 、 统测 试与标 定 需要 一个 长 期 的过程 。在 T U 系 C 控 制系统 开发 的早 期 ,一 般靠 大量 的道路试 验来 摸 索控 制规 律 , 需耗 费 大量 的人 力 、 物力 , 发周 期也 开
车 辆 T U开 发 环 境 。 C 在此 基 础 上 利 用 B ps 技 术 实 现 了 T U软 件 快 速 开发 , y as C 并将 T U控 制 策 略 应用 到 实 际 车辆 进 C 行 了道 路试 验 。 自动 变 速器 模 型 实 时 仿 真结 果 和 实 车测 试 结 果 对 比表 明 , 者 吻 合性 较 好 , 于 此 快 速 开 发 系统 开 二 基
【 bt c A u m t as ii oe i e alhdadi i e a dt t eieeg er l t e A s at nat actnmso m dl s s bse n s n g t o h vh l ni e — m r ] o i r sn t i tre e c n a i
1 前 言
汽 车 自动变 速器 的构成 涉及机 械 、液压 和 电子
等 跨学科 领域 , 考虑 到其工 作工况 复杂 , 再 且对 安全
模 型 , 后集成 于 车辆发 动机实 时仿 真平 台 L b a— 然 a cr
P【 Tl J 系统 , 构成 接 近 于实 车 的虚 拟 车辆 T U开 发 环 C 境 ,并 在 此基 础 上利 用 B p s 技 术实 现 T U软 件 y as C 快 速开 发 。利 用该 环 境对 控 制逻 辑 进 行 于道路 试验 进行精 调 和验证 , 从而 在保证 满 足开发 质量要求 的前 提下 , 大 大缩短 了 T U控 制系统 开发 周期 。 C
01V自动变速器TCC的解决方案

自动变速器01V的TCC问题解决方案目前一些装有德国ZF公司生产的5HP-19(01V)型自动变速器的车辆.一般行驶里程超过120000km以上的车型都会出现驾驶舒适性变差的问题。
问题大多反映在汽车低速行驶时,特别是带有涡轮增压器的1.8T轿车表现尤为明显。
目前使用01V型自动变速器的国产车型有一汽奥迪A6 1.8T、2.4、2.8和上汽帕萨特B5 1.8T、2.8以及帕萨特领驭1.8T等。
根据近两年对这种故障的维修,通常把实际的故障现象描述为:当发动机转速低于2000r/min 以下,车速在30~80km/h之间同时变速器执行在2挡以上的挡位上,打开空调或上坡行驶时最为明显.汽车会无规律的出现耸动现象,此时观察发动机转速会发现.随着汽车的耸动转速表也随之波动。
根据不同车型以及所反映出的故障现象的轻重.我们还总结为:故障现象不明显时一般驾驶员是感觉不到的,特别是汽车在平坦路面行驶时,如果仔细试车会发现发动机转速低于2000r/min以下并稳定在1500~1800r/min之间匀加速行驶时,会突然出现一两下耸动现象.并且当汽车行驶在很长的上坡路时且在使用空调的情况下这种耸动现象稍微明显一些.如果节气门开度大一些,发动机转速超过2000r/min以上,车速高于80km/h以上时这种现象不容易出现。
故障明显时根据上述情况,故障不再是简单的出现一两下耸动,而是转换为频繁的耸动.特别是在4挡时最为明显。
针对这种问题对于大多数维修人员而言特别是对自动变速器TCC锁止离合器控制认识不够的维修人员,他们根据实际故障现象所表现出的故障特征会毫不犹豫地把问题直接指向发动机控制方面,因为此现象不明显时给人最大的感觉就像发动机突然断火一样.而故障明显时又像对大多数特殊车型清洗节气门体后没有重新做匹配一样,也就是出现所谓的游车感觉。
其实往往大多数故障原因是因为变矩器锁止离合器控制(TCC)出现问题以后而导致耸动故障的出现。
为汽车系统设计面向未来的TCU-ECU安全解决方案
编号:__________为汽车系统设计面向未来的TCU-ECU安全解决方案(最新版)编制人:__________________审核人:__________________审批人:__________________编制单位:__________________编制时间:____年____月____日汽车系统互联是一个令人期待的高速增长的市场,同时也面临一个难题亟待解决。
如今数据安全变得日益重要,然而,汽车系统中有许多设备都存在安全隐患。
例如,相对于现在大多数汽车电控单元(ECU)的8位、16位和32位处理器,现有的数据安全算法,ECC和RSA内存占用过高,运行速度太慢。
此外,随着汽车的平均寿命超过11.6年,未来还必须考虑量子计算攻击的风险,因为量子计算攻击可能会破解ECC和RSA秘钥。
为解决这些问题,SecureRF公司和意法半导体合作开发出一项即使在的汽车处理器上仍能极速运行的面向未来的低功耗安全解决方案。
近,SecureRF的WalnutDSA(数字签名算法DSA)和Ironwood KAP(密钥协商协议KAP),这两种安全算法被移植到意法半导体的SPC58ECxx 32位微控制器平台上。
为更好地演示车载信息服务系统控制单元(TCU)与多个ECU的相互过程,两家公司还合作开发了一个解决方案演示模型,并在2018年底特律汽车技术展会上展出了该模型。
SecureRF的群论密码学(GTC)是数字签名算法DSA和密钥协商协议KAP的基础,这虽然不是一个新的密码学分支,但有助于解决物联网、汽车系统和其它互联应用中相对较新的安全问题,可以保护越来越多的资源受限的产品设备的安全。
GTC密码学有三大优势:运算速度快,即使在的设备上仍能快速运算,RAM / ROM占用低,能够抵抗所有已知的量子攻击。
与其它加密方法相比,GTC的运算效率更高,所以更省电。
SecureRF的GTC解决方案软硬件均可实现。
在SPC58ECxx上,性能优势显着为参展TU Automotive展会,双方将数字签名算法DSA 和密钥协商协议KAP的汇编语言算法移植到SPC58ECxx微控制器,以进一步优化这一高效加密方法的运算时间和能耗。
tcu控制器 算力要求
tcu控制器算力要求一、TCU控制器概述TCU(Transmission Control Unit)控制器是汽车中的一个重要部件,用于控制和管理车辆的变速器系统。
TCU控制器的算力要求主要指的是其处理和运算能力,它需要快速准确地处理各种输入信号,并能够实时地对变速器进行控制和调整。
二、TCU控制器的算力需求1. 数据处理能力:TCU控制器需要处理大量的传感器数据和控制命令,包括车速、引擎转速、油门位置、制动状态等。
它需要能够快速地采集、解析和处理这些数据,以保证变速器的稳定运行。
2. 实时性要求:TCU控制器需要实时地响应和调整变速器的工作状态,以适应不同的驾驶条件和需求。
因此,它的算力需求也体现在其对实时性的要求上,即需要能够在极短的时间内做出反应和决策。
3. 算法运算能力:TCU控制器还需要具备一定的算法运算能力,以实现一些高级控制功能,例如根据车速和转速等参数进行智能变速控制,实现平顺换挡等。
这就要求TCU控制器具备一定的算法运算能力,能够快速准确地进行计算和判断。
4. 存储能力:TCU控制器还需要存储一些重要的控制参数和数据,以便在需要时进行读取和使用。
因此,它需要具备一定的存储能力,以满足对数据存储和读取的要求。
三、满足TCU控制器算力需求的方案1. 高性能处理器:选择一款性能强劲的处理器作为TCU控制器的核心,以确保其具备足够的数据处理和运算能力。
可以选择一些专门设计用于汽车电子控制系统的处理器,具备高性能和低功耗的特点。
2. 实时操作系统:采用实时操作系统(RTOS)来驱动和管理TCU控制器,以保证其具备良好的实时性能。
实时操作系统能够提供对任务调度和响应时间的精确控制,确保TCU控制器能够及时地处理和响应各种输入信号。
3. 硬件加速器:对于一些需要较高算力的算法运算,可以考虑使用硬件加速器来提升计算速度和效率。
硬件加速器可以通过专门的电路设计和优化来实现对某些特定算法的加速运算,提高TCU控制器的算力。
基于HiL实时联合仿真自动变速器控制系统TCU快速开发研究

基于HiL实时联合仿真自动变速器控制系统TCU快速开发研究随着汽车技术的快速发展,汽车研发领域也在不断的探索新的技术手段,其中 HiL 实时联合仿真技术是一种快速高效的开发手段,对于自动变速器控制系统 TCU 的快速开发有着重要的意义。
HiL 实时联合仿真技术是一种用虚拟仿真系统替代实际控制系统来验证设计和控制算法的技术,其主要原理是通过高级计算机模拟分析实际能量、信号、运动等物理现象,并与实际硬件进行联合仿真,实现对系统的实时控制和数据采集。
因此,HiL 技术能够在系统开发的早期阶段,就对设计方案进行高度的仿真验证,从而避免实际操作中可能出现的风险和成本。
对于自动变速器控制系统TCU,它需要对变速器的传动机构、气动元件、电气元件等多个因素进行全面控制和监控,而这些元件之间的复杂关系和交互作用也给系统的开发和测试带来了很大的困难。
传统的实际测试方法需要在实际车辆上进行,这不仅成本高、周期长,而且跨越实验室测试环境和实际道路使用环境之间的匹配难度也不容忽略。
而 HiL 实时联合仿真技术正是针对这些问题提供的一种有效的解决方案。
HiL 实时联合仿真技术结合可视化界面设计软件,能够为TCU 开发人员提供详细的仿真结果、数据分析和自适应控制的方法。
它能够对 TCU 算法进行快速迭代,缩短产品研发周期,使得开发人员能够在更早的阶段就开始进行自动变速器控制系统的设计和性能优化。
另外,这种技术还能够减少人工交互、避免风险,并大幅度提高整个自动变速器控制系统的测试效率和精度。
总而言之,HiL 实时联合仿真技术是一个可行而有效的自动变速器控制系统 TCU 开发研究方法,它能够帮助开发人员快速验证设计方案、避免成本风险,减少创新周期。
这种技术的日益成熟和普及,将对汽车行业的快速发展起到积极的促进作用。
在实际应用中,HiL 实时联合仿真技术的开发和研究都面临着一些挑战与机遇。
其中,最显著的挑战就是如何建立准确的仿真模型,尤其是在 TCU 控制算法方面。
PEPS相关EMS及TCU标定开发流程规范
汽车工程研究院文件签发:PEPS相关EMS及TCU标定开发流程规范目录一、适用范围二、关联系统、零件清单三、术语和定义四、系统功能描述五、信号定义六、各部门职责分工七、功能规范开发计划八、附件出自动力总成部编号XXXX 生效日期XXX 版次第1版1适用范围适用于XXXX汽车工程研究院所有的带PEPS功能的发动机系统电控装置ECU和变速箱系统电控装置TCU 的标定开发设计。
2关联系统、零件清单PEPS、智能钥匙。
3术语和定义下列术语和定义适用于本规范。
3.1 EMSEMS(Engine Management System),由各种传感器、执行器和控制单元(ECU)组成用于发动机管理的系统。
3.2 ECUECU(Engine Control Unit),发动机控制单元,搜集各类传感器信号,经过ECU处理,发出控制信号到执行器,保证发动机正常有效运行。
此外还有故障诊断和处理以及自适应等功能。
3.3 TCUTCU(Transmission Control Unit),变速箱控制单元,用于自动变速箱中,控制变速箱的档位策略并执行换挡机构控制,此外还有故障诊断和故障处理等功能。
3.4 PEPSPEPS(Passive Entry Passive Start),无钥匙进入和起动系统。
4系统功能描述PEPS(Passive Entry Passive Start),无钥匙进入和起动系统,此功能中主动进入(Passive Entry)指驾驶员只需要按下门把手请求按钮开关,系统就会自动搜索有效的智能钥匙。
驾驶员可随意把钥匙放在身上任何地方,系统搜索到了即会开锁;主动起动(Passive Start)功能指当驾驶员进入车内后,只需要轻按点火开关按钮,即可启动发动机。
这一系列动作过程中,驾驶员均不需要寻找智能钥匙,只需保证车辆钥匙在车内即可。
其中与ECU和TCU相关的功能为主动起动(Passive Start)功能,原理图如下:防盗认证过程:防盗系统认证包括前级认证和后级认证:1)前级认证指智能钥匙和PEPS系统的通讯认证。
自动变速器控制单元tcu技术要求
自动变速器控制单元tcu技术要求
自动变速器控制单元(TCU)是汽车自动变速器系统中的一个重要部件,主要负责控制变速器的换挡、锁止离合器的控制、动力输出等功能。
以下是一些常见的自动变速器控制单元(TCU)的技术要求:
1. 变速器换挡逻辑:具备智能换挡逻辑,能够根据车速、加速度、油门踏板位置等参数进行换挡判断,并实现平稳、快速的换挡操作。
2. 换挡质量控制:能够通过控制液压系统或电动执行机构,在换挡时控制换挡的速度和压力,以确保换挡的平顺性和可靠性。
3. 提前换挡策略:能够根据发动机转速、车速等参数,提前预判驾驶员的换挡意图,并实施提前换挡操作,以提升燃油经济性和驾驶舒适性。
4. 特殊工况控制:能够根据车辆的工况特点,比如爬坡、超车等,自动调整换挡策略,提供更好的动力输出和驾驶性能。
5. 锁止离合器控制:能够根据车速和加速度等参数,控制自动变速器的锁止离合器的闭合和断开操作,以提供更好的动力传递效率和燃油经济性。
6. 自适应学习功能:能够通过学习驾驶员的驾驶习惯和路况情况,自动调整换挡策略和控制参数,实现个性化的换挡控制。
7. 故障诊断和保护功能:具备故障自诊断功能,能够监测和检测系统的工作状态,及时发现故障并采取相应的保护措施,保证系统的安全性和可靠性。
总之,自动变速器控制单元(TCU)需要具备智能化、可靠性高、响应速度快等特点,以实现汽车自动变速器系统的高性能和高效率运行。
混动汽车tcu标定

混动汽车tcu标定
混动汽车 TCU(Transmission Control Unit,即变速箱控制单元)标定时需要考虑以下几个方面:
1. 动力系统匹配:混动汽车的动力系统由内燃机和电动机组成,TCU 标定时需要考虑两者之间的协同工作,以实现最佳的燃油经济性和动力性能。
2. 换挡策略:TCU 需要根据驾驶员的需求和车辆的行驶状态,制定最佳的换挡策略。
在标定过程中,需要考虑车速、加速度、油门开度等因素,以确保换挡平顺、快速。
3. 能源管理:混动汽车的能源管理非常重要,TCU 标定时需要考虑如何在不同的工况下,合理地分配内燃机和电动机的功率,以实现最佳的燃油经济性。
4. 故障诊断:TCU 需要具备故障诊断功能,能够及时检测到变速箱和动力系统的故障,并采取相应的措施,以确保车辆的安全和可靠性。
5. 驾驶模式:混动汽车通常具有多种驾驶模式,如电动模式、混合模式和燃油模式等。
TCU 标定时需要考虑不同驾驶模式下的换挡策略和能源管理策略。
总之,混动汽车 TCU 标定时需要综合考虑车辆的动力系统、换挡策略、能源管理、故障诊断和驾驶模式等因素,以实现最佳的燃油经济性、动力性能和驾驶体验。
变速箱控制系统(TCU)项目可行性研究报告范文
变速箱控制系统(TCU)项目可行性研究报告范文第一章变速箱控制系统(TCU)项目概要第二章变速箱控制系统(TCU)项目背景及可行性第三章变速箱控制系统(TCU)项目选址用地规划及土建工程第四章变速箱控制系统(TCU)项目总图布置方案第五章变速箱控制系统(TCU)项目规划方案第六章变速箱控制系统(TCU)项目环境保护第七章变速箱控制系统(TCU)项目能源消费及节能分析第八章变速箱控制系统(TCU)项目建设期及实施进度计划第九章变速箱控制系统(TCU)项目投资估算第十章变速箱控制系统(TCU)项目融资方案第十一章变速箱控制系统(TCU)项目经济效益分析第十二章变速箱控制系统(TCU)项目社会效益评价第十三章变速箱控制系统(TCU)项目综合评价及投资建议第一章项目概要一、项目名称及建设性质(一)项目名称变速箱控制系统(TCU)生产项目(二)项目建设性质本期工程项目属于新建工业项目,主要从事变速箱控制系统(TCU)项目投资及运营。
二、项目承办企业及项目负责人某某有限责任公司三、项目建设背景分析中国为此投身于技术革新。
中国的关键词是“中国制造2025”。
这是正确的开端,因为全球正要跨入第四次工业革命数字经济的门槛。
谁不参与新的工业革命,谁就会被甩在后面。
主要动力之一将是工业的数字化。
德国因而在几年前提出了“工业 4.0”倡议,现在正大力推进。
现在没人能预测谁将在“工业4.0时代”拔得头筹,并借此在日愈激烈的国际市场竞争中走在前列。
德国专家一致认为,除了研发资金,还有两个息息相关的因素将起到决定作用:数据安全和数据主权。
然而,恰恰与之相反,数字经济需要的是一个受保护的虚拟空间,尤其是针对工业数据而言。
要想成功发展工业 4.0,就必须保护带来创新成果的企业及科研机构研发人员和工程师的“主权”。
他们必须拥有数据的“管辖权”。
物联网和工业4.0的前提是具有针对性、因而比现在更智能的安全存储(云解决方案)和数据交流的大幅提高。
自动变速器TCU标定技术流程(车界动力精英圈)

精华:TCU标定那点事[车界导读]TCU标定是指对于自动变速器控制单元的标定,目前自动变速器分为传统AT(液力变矩器+液力控制的行星齿轮机构)、DCT(双离合变速器)、CVT (无极变速器)、AMT(半自动变速器)。
由于变速器硬件结构的不同,TCU的标定策略也不尽相同,一般来讲,传统的AT标定模块最为复杂也最为成熟;DCT的标定开发最有难度,尤其是针对DCT 的一些先天硬件结构特征如双离合器控制;CVT分为带TCC(液力变矩器)和无TCC两种,硬件核心技术在于钢带,标定主要是换挡点及液压标定;AMT属于半自动变速器,其硬件与MT相似,成本较低,主要不同之处在执行机构的自动控制,受硬件结构限制,AMT换挡质量普遍偏差,主要是提升了操作便捷性和降成本。
-CVT主体结构(下图)-传统AT主体结构(下图)虽然各款自动变速器结构不尽相同,但标定流程有很大的共性,从开发角度一般流程如下:一.桌面标定(15工作日)该部分主要是输入与变速器相关的技术参数,包括:整车参数、车重、发动机台架数据、功能模块定义(需明确TCU要支持哪些整车功能,如ECO/SPORT/ESC/ACC/IUPR等)、变速器基础油压参数设定。
基于这些基础参数,确定变速器选型,不同的发动机要匹配不同承载能力的TCC和内部摩擦片,TCU 会基于这些参数来设定主系统和子系统的油压基础值、基础换挡曲线及满足整车功能的软件。
二.整车数据检查:(5工作日)在试验车辆到位后,会进行整车测试,主要确定基础软件是否满足整车功能要求,更重要的是验证基础设定值是否正常,油压控制是否合理,是否有软件bug 存在三.正常模式换挡曲线(45工作日)这部分工作可以说是TCU标定最重要的工作,也是反复性最大的工作,因为TCU的换挡曲线直接决定了驾驶风格,在很多企业中该部分工作直至中后期还在调整,但换挡曲线是TCU标定的基础,该部分需在项目开发的中前期完成,后期避免大改。
所谓正常模式,是指常温、常海拔、常坡度的换挡曲线标定,换挡曲线要基于整车及发动机台架参数,ECU的pedal-map(踏板-扭矩表)综合考虑驾驶性、油耗经济性、配合ECU的排放。
基于HiL实时联合仿真自动变速器控制系统TCU快速开发研究
基于HiL实时联合仿真自动变速器控制系统TCU快速开发研
究
李君;谢先平;梅近仁;潘书澜;陈思远
【期刊名称】《汽车技术》
【年(卷),期】2010(000)011
【摘要】建立了自动变速器模型,并集成于车辆发动机实时仿真平台Labcar-PT系统,构成了接近于实车的虚拟车辆TCU开发环境.在此基础上利用Bypass技术实现了TCU软件快速开发,并将TCU控制策略应用到实际车辆进行了道路试验.自动变速器模型实时仿真结果和实车测试结果对比表明,二者吻合性较好,基于此快速开发系统开发的TCU控制策略有效.
【总页数】6页(P7-12)
【作者】李君;谢先平;梅近仁;潘书澜;陈思远
【作者单位】联合汽车电子有限公司;联合汽车电子有限公司;联合汽车电子有限公司;联合汽车电子有限公司;联合汽车电子有限公司
【正文语种】中文
【中图分类】U463.212
【相关文献】
1.基于RT-LAB的逆变器并联HIL实时仿真平台 [J], 刘轶强
2.基于HIL仿真系统的TCU应用软件测试 [J], 范萍萍;张守军;周玉志
3.HIL实时仿真PWM信号等效处理方法及影响研究 [J], 应鹏飞;苏建徽;汪海宁;施
永
4.基于xPC的地铁TCU实时仿真测试系统设计 [J], 吴浩;张峰;李小波
5.基于混合仿真技术车辆ABS控制系统快速开发研究 [J], 李君;张建武;喻凡;殷承良
因版权原因,仅展示原文概要,查看原文内容请购买。
TCU控制策略 (2)
.
. TCU速比控制策略
1.VCU和TCU之间的总线报文信号交互关系如下图:
VCU向TCU发送轮边扭矩、油门踏板深度和车速信号;
TCU向VCU发送当前变速器总速比信号。
2.TCU目标速比控制方法如下图:
变速器目标速比分为正常行驶和能量回收两种控制模式。
当油门踏板完全松开并且车速大于14km/h时,启动能量回收模式,为了使电机维持较高的转速以利于能量回收,TCU控制整车目标速比与原车减速比7.88一致。
输入当前车速,通过一维插值表线性插值获得电机目标转速,电机目标转速除以变速器输出锥转速得到变速器目标速比。
当踩下油门踏板时,启动正常行驶模式,为了使电机和变速器维持较高的工作效率以利于整车性能,TCU控制整车目标速比使得电机和变速器在其map图高效区运行。
输入当前车速和车辆轮边扭矩目标值,通过二维插值表线性插值获得变速器目标速比。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动变速器TCU解决方案
摘要:基于RapidECU的自动变速器TCU快速开发解决方案,可以支持液动、气动和电机三种不同执行机构的自动变速器,使用户可以在数周内完成TCU原型样机的开发,实现离合器控制,选换挡操作和发动机接管控制等基本功能,在数月内完成批量产品样件的开发,实现中小批量装车试验,为自动变速器TCU大批量产业化打下良好基础。
概述
自动变速器能够实现车辆自动起步,自动换挡,提高驾驶舒适性,减少驾驶员疲劳。
自动变速器还能够提高整车动力性,改善燃油经济性和排放,已经逐渐成为现代汽车的基本配置。
目前市场上常见的自动变速器有机械式自动变速器(AMT)、机械式无级自动变速器(CVT)、液力机械式自动变速器(AT)和双离合器式自动变速器(DCT)四种类型,按照执行机构不同可分为液动、气动和电机三种类型。
自动变速器系统是由TCU、选换挡机构及离合器机构组成,其中TCU采集传感器信息及CAN总线数据,经过运算处理后,控制执行机构动作,实现选换挡、离合器动作及发动机接管控制等,是自动变速器控制系统的核心。
TCU电控单元主要包括控制器硬件和控制器软件,其中的控制器软件又包括基础软件与应用软件。
由于TCU电控系统执行机构的多样性及复杂性,无论是控制器硬件开发,还是基础软件或者应
用软件开发都需要花费大量的时间、精力以及昂贵的费用。
如果没有合适的开发工具,TCU的研发和产业化几乎成了难以完成的任务。
使用RapidECU快速原型控制器可以在没有控制器硬件的情况下,提前进行控制算法的开发与验证,尤其适合于自动变速器等复杂系统电控单元的开发研究,快速原型的试验结果还可以为产品硬件设计提供参考。
因此,控制器快速原型在进行软件快速验证的同时,也降低了硬件返工几率,从而缩短开发周期,降低开发成本,提高控制器设计质量。
开发流程
开发流程符合国际标准的V型开发模式,基于MATLAB\Simulink\Stateflow\ECUCoder图形化建模方式建立软件工程,完全零手工的一键式全自动代码生成,可以同时完成应用软件和基础软件模型自动代码生成,在开发过程中随时保持模型和代
码的同步状态。
通过下载到高性能的产品级控制器
硬件平台完成实时环境下的测试和验
证,使开发和产品化在统一的平台下实
现,提供集成式的完整工具链组合,支
持用户在TCU生命周期内的开发、测试、
标定、验证、生产和售后等全部流程。
硬件解决方案
自动变速器TCU硬件需要能够正确采集变速器所有传感器的信号,准确控制所有执行器的动作,由于自动变速器的多样性和复杂性,要求TCU控制系统硬件运算速度快,存储空间大,同时,为了用于实验室、台架、装车等各个阶段,要求硬件防护等级高,可靠性好,坚固耐用。
RapidECU是一系列产品级快速原型控制器,可以在电控系统
的开发过程中替代产品控制器硬件,通过自动代码生成技术,将建
模与仿真阶段所形成的控制算法模型下载到快速原型控制器硬件
中,并连接实际被控对象,进行控制算法的硬件在环仿真验证和实
物验证,并在开发阶段早期实现测量标定。
RapidECU-U1系列是专门用于自动变速器的快速原型控制器,产品包括RapidECU-U1、RapidECU-U1M及RapidECU-U1C,技术参数如下表。
使用RapidECU-U1系列产品作为自动变速器TCU硬件解决方案的优势主要包括:
✓产品原型,集成信号调理与功率驱动电路
✓搭载Freescale高性能MPC5554芯片
✓适合实验室、台架、装车等各个阶段
✓高性价比的紧凑型硬件,坚固耐用
基础软件解决方案
自动变速器TCU基础软件首先需要提供控制系统TCU硬件与应用软件之间的接口,其次需要对应用软件的各个功能模块进行合理的任务调度,再次需要实现对控制器硬件的监控与管理,最后需要实现一系列标准协议。
ECUCoder 是基于Simulink的全自动代码生成工具,用于配置ECU控制算法模型与基础软件模型,并自动生成产品代码。
支持飞思卡尔、英飞凌、意法等知名厂家的汽车电控系统主流芯片。
ECUCoder 提供了功能强大的基础软件Simulink 模块库,可以通过友好的用户界面便捷、直观地配置基础软件参数并由Simulink 模型自动生成基础软件代码。
由于软件可以灵活、深层次地访问并配置基础软件参数,模型生成的基础软件代码可以支持控制器快速原型及产品开发两个阶段。
ECUCoder for MPC55xx U1是专门用于自动变速器TCU的全自动代码生成工具,支持RapidECU-U1系列快速原型控制器及客户自研或其它供应商控制器,包含如下软件模块。
使用ECUCoder作为自动变速器TCU基础软件解决方案的优势主要包括:
✓自动代码同时生成基础软件与应用软件,无需手动集成
✓功能强大的GUI界面,可直接从模型访问并配置整个基础软件
✓代码可靠,代码可读性与执行效率良好折中
✓同时提供芯片级模块库与控制器级模块库,支持用户自主开发的控制器硬件
应用软件解决方案
自动变速器TCU控制系统的性能直接影响车辆的动力性、经济性及驾驶员体验,而这些参数指标都由TCU应用软件尤其是控制策略直接决定,所以控制策略是TCU电控系统的关键。
TCU控制系统由离合器控制、选换挡控制、发动机接管控制、协调层控制及顶层控制等几个部分组成,按照一定的控制规律,实现车辆的起步、升降挡等过程的闭环控制。
ATMaster是针对自动变速器的控制算法模型,基于MATLAB/Simulink开发,能够实现对不同执行机
构自动变速器的控制,模型采用模块化结构,层次架构清晰,可根据不同的执行机构增加或裁减相应的功能模块,以达到目标自动变速器的控制要求。
ATMaster是专门用于自动变速器TCU的控制算法模型,模型总体结构如下图。
使用ATMaster作为自动变速器TCU应用软件解决方案的优势主要包括:
✓以协调控制层为核心的自动变速器控制算法
✓算法适应性强,可以匹配不同类型执行机构的自动变速器
✓基于MATLAB/Simulink开发,模型层次分明,可读性好
✓模块化的模型结构,方便按需裁减或者添加功能模块
测量标定解决方案
为了进一步优化控制算法,实现自动变速器控制系统
和变速器本体的匹配,需要对TCU进行标定,优化匹配控
制规律,以达到需求的变速器换挡品质。
常见的标定系统由上位机测量与标定软件、CAN通信
适配器、高性能数据采集模块构成,标定软件的CCP接口
和标定ECU相连,进行上下位机实时数据交互,CAN通信适配器提供两路以上CAN总线通道,分别用于ECU接口和数据采集模块接口。
高性能数据采集模块负责将外部传感器信号以较高的采样频率和采样精度收集,并保证采集数据和原机实时同步,用于精细化标定和对比分析。
下图为常见标定系统与TCU及变速器台架连接示意图。
标定系统示意图
总结
以RapidECU作为硬件平台,使用ECUCoder 全自动代码生成工具,利用ATMaster控制算法模型,可以在数周内完成自动变速器TCU的原型样机开发,实现离合器控制,选换挡操作和发动机接管控制等基本功能。
由于使用产品级控制器硬件,用户拥有内容开放、架构清晰的软件源代码与模型,可以在数月内完成批量产品样件开发,实现中小批量装车,为自动变速器TCU大批量产业化打下良好基础。