伦茨驱动系统资料
伦茨中文使用手册 ppt课件

9400 Servo Drives
Target
First without engineer Engineer with single drive, basics of TA Structured project, further TA FB editor Multi axis applications Online alternatives
Next Back
8
Exercise 1: Detect the drive status
by means of LEDs and keypad 通过指示灯和面板检测驱动器状态
1. Switch on the supply voltages (24 V and 400 V)
电源上电
2. Make the left drive rotate:运转左侧驱动器
9400 Servo Drives
Target
First without engineer
Engineer with single drive, basics of TA Structured project, further TA FB editor Multi axis applications Online alternatives
FB editor
Multi axis applications
单驱动型1)
– Extension module Ethernet (扩展模块-以太网) – Memory module MM330 (存储模块-MM330) – Safety module SM0 (安全模块-SM0)
Online alternatives
How to go online 如何连接
伦茨9300系列驱动系统..
9300系列产品种类
各版本9300系列伺服控制器具有如下统一的硬 件: -内置电源模块-单台控制器即可完成单轴驱动, 不必像以往那样采用整流单元与速度单元的组合; -电源及回馈单元-可实现群控及多轴传动时的 节能运行; -反馈-可选择旋转变压器,正/余弦编码器, 或增量编码器反馈。
端子配置
9300ES接线
9300ES接线
9300ES参数设定
控制器的参数设定的作用是使驱动器适用于 实际应用。 可将实际应用中的参数集存储。共可存储4套 参数集,因此控制器很容易由一种应用控制 调整到另一种应用控制。 参数设定的方式: 通过操作模块 通过现场总线模块及操作程序
参数结构
主菜单:包含子菜单和全部代码表 子菜单:包含将要定义的代码 代码级:没有子代码的代码包含一个参数,有子代码 的代码包含若干参数 参数级/运行级 有四种不同侧参数类型:物理变量的绝对值(如220V, 10S);控制变量的相对值(如50%设定值);特定状 态的数字代码(如0=控制器禁止,1=控制器启动); 显示值(如C0054下电机电流的实际值)
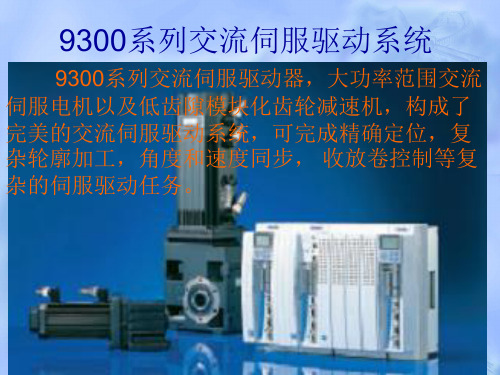
9300系列交流伺服驱动系统
9300系列交流伺服驱动器,大功率范围交流 伺服电机以及低齿隙模块化齿轮减速机,构成了 完美的交流伺服驱动系统,可完成精确定位,复 杂轮廓加工,角度和速度同步, 收放卷控制等复 杂的伺服驱动任务。
9300系列产品种类
9300系列交流伺服控制器分为标准型和专用型,标准型为9300ES(9300 servo);专用型包括用于定位控制的9300EP,用于印刷套准控制的 9300ER,以及用于电子凸轮控制的9300EK。
9300ES接线
将屏蔽线用附件中的屏蔽板①扣紧 ,并将屏蔽板① 用螺丝固定到托 架上②
伦茨驱动器工作原理(一)

伦茨驱动器工作原理(一)伦茨驱动器工作原理什么是伦茨驱动器?伦茨驱动器是一种具有高传动效率和低噪音的机械装置,常被用于汽车、飞机和工业机械等领域。
它是由奥托·伦茨于1894年发明的,如今已成为一种常见的传动系统。
伦茨驱动器的工作原理伦茨驱动器是一种齿轮传动系统,其原理基于两个相互啮合的齿轮,一个为内齿环,一个为外齿环。
内齿环内齿环是伦茨驱动器的主动齿轮,通常由传动源(如引擎)驱动。
它具有一系列斜面齿槽,槽内的齿轮齿相互间隙相等。
外齿环外齿环是伦茨驱动器的从动齿轮,与内齿环啮合并转动。
它具有与内齿环齿槽相配合的槽形齿轮。
工作过程1.当内齿环驱动外齿环时,内外齿轮的齿槽逐渐靠近,并开始相互啮合。
2.内齿环的运动使外齿环也开始转动。
由于齿槽的斜面设计,齿轮齿的相互啮合会引发一个侧向力,使外齿环相对于内齿环旋转。
3.这种侧向力的结果是外齿环的运动轨迹呈现出一个类似椭圆的形状,形成旋转迴圈。
4.外齿环的转动通过传动轴向其他传动装置(如车轮)传递动力。
伦茨驱动器的优点伦茨驱动器具有以下几个优点:•高传动效率:伦茨驱动器的齿形设计使得传动效率非常高,损耗较小。
•低噪音:由于齿轮的设计和啮合方式,伦茨驱动器的噪音较低。
•轻量化:相比其他传动系统,伦茨驱动器的结构相对较轻,有助于减轻整体重量。
•紧凑性:由于齿轮的特殊设计,伦茨驱动器可以在有限的空间内实现高效传动。
结论伦茨驱动器是一种高效、低噪音的传动装置,广泛应用于各种机械系统中。
通过内外齿环的相互啮合和旋转迴圈的形成,伦茨驱动器有效地传递动力并实现所需的机械工作。
以上对伦茨驱动器的工作原理进行的解释,相信能够帮助读者加深对这一传动系统的理解。
使用注意事项在使用伦茨驱动器时,需要注意以下几点:1.润滑:为了保证伦茨驱动器的正常运行,必须定期对齿轮进行润滑。
适当的润滑可以减少摩擦和磨损,延长驱动器的使用寿命。
2.温度控制:由于高速旋转和传递的动力,伦茨驱动器可能会产生较高的温度。
伦茨驱动系统资料共39页

60、生活的道路一旦选定,就要勇敢地 走到底 ,决不 回头。 ——左
伦茨驱动系统资料
46、法律有权打破平静。——马·格林 47、在一千磅法律里,没有一盎司仁 爱。— —英国
48、法律一多,公正就少。——托·富 勒 49、犯罪总是以惩罚相补偿;只有处 罚才能 使犯罪 得到偿 还。— —达雷 尔
50、弱者比强者更能得到法律的保护 。—— 威·厄尔
56、书不仅是生活,而且是现在、过 去和未 来文化 生活的 源泉。 ——库 法耶夫 57、生命不可能有两次,但许多人连一 次也不 善于度 过。— —吕凯 特 58、问渠哪得清如许,为有源头活水来 。—— 朱熹 59、我的努力求学没有得到别的好处, 只不过 是愈来 愈发觉 自己的 无知。 ——笛 卡儿
伦茨中文使用手册

7
Next Back
Exercise 1: Detect the drive status
by means of LEDs and keypad 通过指示灯和面板检测驱动器
= Controller inhibited 控制器禁止
= Controller enabled 控制器使能
24 V
CAN ERROR
CAN 错误
= Bus warning 总线报警
= Bus off 总线关闭
DRIVE ERROR
驱动器错误 OFF = OK
= Error status 错误状态
= System error 系统错误
通过Engineer 和 操作面板进行参数设定
Technology Applications (TA)
技术应用
Next
Diagnostics and configuration of the
Back
application with the function block
editor
2
Next Back
Modular set-up (≤ 11 kW)
Mounting base 安装底板
Power module 功率模块
Extension module 扩展模块
3
Next Back
Interfaces at the power module
Analog / digital IOs
指示灯
ready
伦茨9400中文使用手册.

9400 Servo Drives
Target
First without engineer
Engineer with single drive, basics of TA Structured project, further TA FB editor Multi axis applications Online alternatives
– Firmware version 01.51.01 (固件版本01.51.01)
▪ 2x Motor MCS06C41 with resolver and tooth wheel(2个 伺服电机带旋变和齿型轮)
– left Z = 72 and 32 (左 Z=72,32) – right Z = 60 and 20 (右Z=60,20)
USER
用户定义 Applicable in the application 在应用中使用
9400 Servo Drives
Target
First without engineer
Engineer with single drive, basics of TA Structured project, further TA FB editor Multi axis applications Online alternatives
Target First without engineer
Engineer with single drive,
basics of TA Structured project, further TA FB editor Multi axis applications Online alternatives
Welcome!
伦茨变频器

总线.2 kbit/s
500 kbit/s
9.6 kbit/s..12Mbit/s
最大端站数
90
63
125
传输距离
1200m
400
1200m
通信介质
RS232,RS485或光纤
RS485
RS485
通信协议
LECOM-A/B V2。0
可联接上位机
PC,IPC,PLC
总线化
The drive system !!!
Automation
1.3 现代驱动系统
高度智能化,高度柔性化
| 基本系统硬件 III
Freely
13.53 Hz
|| 系统功能
configurable
function blocks
||| 用户功能
&
Technology functions II
Electronic gearbox Positioning Register control Cam profile generator HVAC Hoists Liftcontrol
The drive system !!! Automation
直流传动
四套参数集可任意切换(通过端子, 操作面板, 通讯总线) 4900 可四象限 两象限切换运行 电机电位器功能, 可自由编程的8DI/8DO, 2AI/2AO 多种反馈: 线圈电压反馈, 测速机, 旋转变压器, 编码器 多种控制功能: 定位, 同步电子轴, 角度同步, 张力和卷径计算 内置现场总线系统, 如可用InterBus-S
The drive system !!! Automation
2. 发展历程
由Hans Lenze于1947年接管一家机 械传动产品制造厂,开始生产各种 Lenze传动产品
伦茨 Global Drive smd系列变频器 说明书

2 3
安全信息……………………………………………………………2 技术数据………………………………………………………………4
3.1 3.2 通用数据 / 应用条件…………………………………………………………………………4 额定数据…………………………………………………………………………………… 5 3.2.1 3.2.2 1AC 控制器额定数据………………………………………………………………5 3AC 控制器额定数据………………………………………………………………5
!" 0.7g >3.5mA IP20 !" !"#$%&'( <0.5kW 0.5...1kW >1kW !" ! !"#$ !"# !" !
EMC !"#$%&'
!"#$%&'()*+,-. ! / !"#$%&'(
!"#$%&'()*+, EN61000-3-2
4
!
3.2 3.2.1 1AC
5 6 7 8
上电调试………………………………………………………………1 2 参数设定………………………………………………………………1 3 代码表…………………………………………………………………1 4 故障诊断与排除………………………………………………………2 0
i
1
1.1 !"#$
!"#$ smd !"#$%&' !"#$%&'( ( rev 14 !" !"#$%&'( !"#$%
伦茨8400培训资料03_Application-BasicFunctions_en-cn
• This will ensure that when changing between the drive basic functions the internal set points are synchronized.
这保证当驱动基本功能之间改变时内部设定值是同步的。
设定值输入nSpeedSetValue_a 限于速度限定值C2611/1…4(两个旋转方向的 nmin 功能独立于设定值源,例如模拟量输入或者CAN)
• I-component of the speed controller can set directly via the inputs bSpeedCtrlIOn and bSpeedCtrlI_a
• LS_MotorInterface
Good to know … 需知……
• For problem-free interaction, the two blocks have interfaces with corresponding inputs and outputs and must be connected to each other.
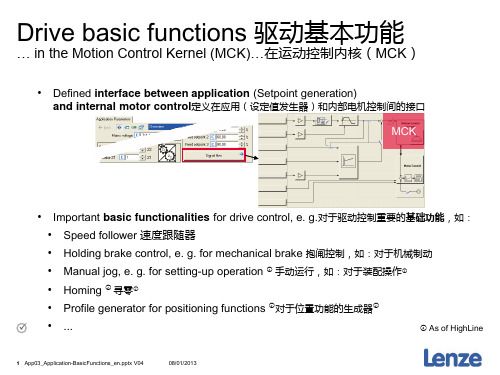
Drive basic functions 驱动基本功能
… in the Motion Control Kernel (MCK)…在运动控制内核(MCK)
• Defined interface between application (Setpoint generation) and internal motor control定义在应用(设定值发生器)和内部电机控制间的接口 MCK
速度跟随器:速度设定值 > 速度参数设定阀值
• Manual jog, positioning or homing request the release of the brake directly via internal signals in the MCK
伦茨(Lenze)82008210系列变频器中文说明书

782031C N Lenze伦茨橾作手册Global Drive8200/8210系列变频器功率范围0.37…11KW怎样用这些操作指令…对特定的功能,可先参考表中的内容,然后根据索引可看到详细的操作说明为了查阅方便操作指南中用了不同的符号,并在重要的条款中做了加黑处理这个符号给出方便操作信息注意!尽可能避免损坏设备注意!操作时小心人身安全Lenze 1本技术说明用于带有以下名牌的设备8201 E.lx.lx 8203 E.lx.lx 8211 E.Ox.lx 8213 E.Ox.lx 8202 E.lx.lx 8204 E.lx.lx 82l2 E.Ox.lx 82l4 E.0x.lx82l5 E.Ox.lx 82l7 E.Ox.lx 82ll E.lx.2x 82l3 E.lx.2x 82l5 E.lx.2x 82l7 E.lx.2x 82O2E.lx.lx.YOO282l6 E.Ox.lx82l8 E.Ox.lx82l2 E.lx.2x82l4 E.lx.2x82l6 E.lx.2x82l8 E.lx.2x82O2 E.2x.lx.YOO2 装配深度减少的改型变频器类型IP2O封装硬件版本号和索引号软件版本和索引号改型编辑:O3.ll.l994 打印日期 O5.l2.l994 改变软件版本号2x 13.02.199507.08.19952 Lenze目录设计和安装8200/8210系列的特点 (6)1.变频器的数据 (7)1.1通用数据 (7)1.2与型号有关的数据 (8)1.3制造商声明 (9)1.3.1直接应用 (9)2.尺寸和安装 (10)2.1安装 (10)2.2外型尺寸 (11)3.01 (14)3.18200系列变频器的主电路连接 (14)3.28210系列的主电路连接 (15)3.3控制接线 (16)3.4控制输入和输出 (17)3.5并联直流母线运行 (18)3.5.1多台变频器的并联 (18)3.5.2直流电压供电 (18)3.6射频干扰的抑制和屏蔽 (19)4.23 (21)4.1操作面板8201BB (21)4.2操作面板的引出端子的8272BB (22)4.3设定电位器 (23)4.4制动斩波器 (23)4.5主电抗器 (25)4.6熔断器 (26)4.7抑制射频干扰滤波器 (27)4.8电机滤波器 (28)4.9电机电压滤波器 (29)4.10附件 (30)编程:1.开关初始化 (31)2 (32)3.显示 (34)3.1运行状态显示 (34)3.2操作面板8201BB (34)3.3显示值 (36)3.4启动显示 (36)4.基本控制操作 (37)4.1操作编程结构 (37)Lenze 34.2参数代码的设定和改变 (37)4.3操作模式 (40)4.4参数集 (40)5.8200变频器的编程 (41)5.1基本设定 (41)5.1.1最小输出频率f mn (41)5.1.2最大频率设定f_ (41)5.1.3加、减速时间设定 (42)5.1.4V/f 额定频率 (42)5.1.5V/f特性和提升电压设定V_ (43)5.2给定值选择 (44)5.2.1模拟量给定值选择 (44)5.2.2通过LCD操作面板给定 (44)5.2.3寸动频率JOG (45)5.2.4模拟电机电位器 (45)5.3UVWXYZ (46)5.3.1控制器使能(RFR) (46)5.3.2改变旋转方向(CW/CCW) (46)5.3.3快速停止(QSP) (47)5.3.4DC 制动(DC INJ) (47)5.3.5改变参数集(PAR) (47)5.3.6跳闸设定(TRIP) (48)5.3.7端子配置一览 (48)5.3.8继电器输出 (49)5.3.9模拟量输出 (50)5.4扩展设置 (51)5.4.1起动选择/瞬间重起动电路 (51)5.4.2最大电流限制 (52)5.4.3I2.t 监视 (53)5.4.4滑差补偿 (53)5.4.5跳闸复位 (54)5.4.6运行时间表 (54)5.4.7软件版本和变频器型号 (54)5.58200系列代码表 (59)6.8210系列变频器编程 (59)6.1基本设置 (59)6.1.1最小输出频率f;^ (59)6.1.2最大输出频率fj/4 (60)6.1.3加速和减速时间 (61)6.1.4V/f额定频率t (62)6.1.5控制方式 (62)6.1.6提升电压V/i n设定 (62)6.2设定值选择 (62)6.2.1模拟量给定值选择 (63)6.2.2通过操作面板给定 (64)4Lenze6.2.3寸动频率(JOG) (64)6.2.4电机电位器 (64)6.3控制端子功能 (65)6.3.1控制器使能(RFR) (65)6.3.2改变旋转方向(CW/CCW) (66)6.3.3快停(QSP) (66)6.3.4直流制动(DC INJ) (66)6.3.5参数集(TRIP)改变 (67)6.3.6跳闸设定 (68)6.3.7端子配置一览 (69)6.3.8继电器输出 (70)6.3.9模拟量输出 (70)6.4扩展设定 (71)6.4.1起动选择/瞬间重起动 (72)6.4.)最大电流限制 (72)6.4.3电机数据输人 (73)6.4.4I2.t 监控 (73)6.4.5滑差补偿 (74)6.4.6斩波频率 (74)6.4.7跳闸复位 (74)6.4.8运行时间表 (74)6.4.9软件版本和变频器型号 (75)6.4.10运行速度显示 (75)6.58210系列代码表 (76)维护1.监视报警 (81)2.故障报警 (81)2.1主电路连接中错误指示 (81)2.2操作中的故障报警 (81)3.故障确定 (83)3.1电机不转 (83)3.2LED绿灯闪烁 (83)3.3LED红灯闪烁(每0.4秒) (83)3.4LED红灯闪烁(每秒) (83)3.5LED 不亮 (83)3.6电机运行不平稳 (83)3.7电机的电流过大 (84)Lenze 58200/8210系列的特点230V电压等级的8200系列包括4种型号的变频器。
伦茨中文手册资料

Interfaces at the power module
✓ ready
Next Back
5
LEDs
指示灯
CAN RUN
CAN 运行
OFF
= CAN inactive CAN没激活
= Pre-operational 预操作
= Operational 操作
DRIVE READY
驱动器投入
OFF
= Pulse inhibit due to an error 由于错误而禁止
Welcome!
Practical introduction: 实用简介
L-force 9400 Servo Drives L-force | Engineer
19 January 2007
Trainer: Torsten Heß, Markus Toeberg, Markus Warnecke, Stefan Witte
9400 Servo Drives
Target
First without engineer
Engineer with single drive, basics of TA Structured project, further TA FB editor Multi axis applications Online alternatives
诊断接口
Resolver input
旋转变压器接口
伦茨9400培训资料

20
9400 Servo Drives
内置元件
内置RFI滤波器,降低射频干扰 内置直流电抗器*,平衡功率因数,提高电网效率。 内置制动斩波器,节约空间,节约成本。 内置CANopen 通信接口
*3kW以上
21
9400 Servo Drives
性能特点
高性能电机控制 – 同步/异步电机现场伺服控制 – 无传感运行模式 (SLC) 运行周期 – 电流/转矩控制 – 速度/位置控制 62.5 µs 250 µs
应用存储在存储模块中
15
9400 Servo Drives
多种数据存储(存储单元)
Engineer project 工程项目
Communication data,application, parameters etc. 数据交换
ready Next Back
Motor parameters,encoder information, etc.电机参数 Firmware,Main memory, etc. 固件
Welcome!
L-force 9400 Servo Drives 基础产品介绍
9400 Servo Drives
System overview系统总览
next back
2
9400 Servo Drives
9400伺服驱动系统概览
Innovative 创新 – a completely new concept in installation全新的安装 方式 Tailor-made 定制系统 – modular architecture 模块化结构
9400 Servo Drives
Runtime software 实时软件
伦茨历史和产品及驱动系统应用介绍

I/O系统
机器和系统逐渐的自动化程度逐渐 提高,I/O 装置的数目也相应增加, 转而导致界数目增加。分布式I/O 系统可让一切井然有序。Lenze 有 两种产品,适合简单数字应用及更 复杂的自动化工作。 紧凑型系统 紧凑型系统适用于8位、16位和32 位的模块,最多有24 个输入,8个 输出。使用单线或三线技术。 模块化系统 模块化系统由三个部件组成:网关、 电子模块及背板总线。最多可组合 32个元件。
绕驱动
通常连续物料会卷在卷 轴上,加工时放卷,加 工结束时收卷回到卷轴 上。同步驱动器位于放 卷和收卷之间。典型应 用为: 用于纺织、薄膜、造纸、 金属片、电缆的卷绕装 置 印刷机械 包装机械 连续加工和改良过程
其它驱动应用
伺服驱动器
9400 伺服驱动器 StateLine 9400 伺服驱动器 HighLine 9400 伺服驱动器 伺服变频器 940 伺服 ECS 伺服系统 9300 伺服变频器 9300 伺服 PLC(内置PLC的伺服变频器) 930 伺服驱动器 )
伺服电机和减速机
伦茨的伺服电机具有响应快、结构紧凑、可靠 性高,易于安装,使用寿命长的特点。 当减速机配合高动态性能的同步或异步电机一 同使用时,能够实现良好的动态性能和准确的 定位。
驱动系统应用分类
传输装置驱动器 滑行驱动器 提升驱动 定位驱动 同步驱动 卷绕驱动 用于横切机和飞锯的间歇驱动 凸轮驱动 用于成形加工的驱动器 主驱动器和工具驱动器 用于泵和风扇的驱动 用于机器人的协调型驱动
传输装置驱动器
自动传送装置可在系 统不同的机械加工站 之间传输物料,或将 产品送至或送出存储 系统和物流中心。大 宗物料通常会持续传 输,而单个物件传送 装置会根据需要接通 或关闭。典型应用如 下: 棍式传输机 链式传输机 螺旋传输机 引射器 环形传输机
伦茨9300系列驱动系统

2 3 4 5 6 7 8 9
–编码器的供电电压可以在 5~8V间调整 – 采用双绞屏蔽线. – 两端屏蔽线均须接PE地.
KTY
9300ES接线
X4 X5/28 X5/E1...X5/ (ST) X5/A1...X5/A4 X6/1,X6/2 X6/3,X6/4 X6/62, X6/7 X6/63, X6/7 系统总线 控制器使能 数字量输入 数字量输出 模拟量输入1 模拟量输入2 模拟量输出1 模拟量输出2
9300ES接线
CW rotation SIN RefSIN COS RefCOS
0.5V = 2.5V 0.5V = 2.5V
电机端编码器接 头管脚号
最大电缆长度 50 m
RefSIN SIN RefCOS COS Vcc GND -RS485 +RS485 +KTY -KTY
93XX
9 1 2 3 4 5 6 7 11 12
装入参数集
装入参数集
参数集传输
只有在使用端子X5/28作为禁止源使控制器禁止时才可以装入参 数集。 使用操作模块,可以将全部参数集从一个控制器传递到另一个 控制器。(即复制参数集)
参数集传输
通讯与自动化
9300 系列伺服驱动器可 通过各种工业总线模块接 入自动化系统,各种型号 的PC机和PLC均可作为 通讯系统的主站,利用 RS232和CAN总线接口 模块,可实现驱动器与计 算机的无缝连接,并结合 调试软件对驱动器进行调 试和监测。 9300伺服控制器通过AIF端口提供了多种现场总线通讯模式: -LECOM A/B:通过RS232/485接口联网; -LECOM LI:通过Fibre optics 实现联网 -InterBus-S:通过DRIVECOM Profle21 实现远程通讯; -System bus(CAN):通过I/O端子实现控制器间的联网; -PROFIBUS-DP:通过PROFIBUS-DP接口联网。
伦茨9400中文使用手册
连接
10-pole special cable RJ69 10芯RJ69电缆
USER
用户定义 Applicable in the application 在应用中使用
5
✓ ready
Next Back
6
Keypad
面板
• 4 direction keys for navigation
4个方向键用于导航
• 2 context-sensitive function keys
24 V supply and state bus
24V和状态总线
Analog / digital IOs
模拟/数字 I/O
2 module receptacles for extensions
2个扩展模块插槽
LEDs
指示灯
Diagnostic interface
诊断接口
Resolver input
= Controller inhibited 控制器禁止
= Controller enabled 控制器使能
24 V
CAN ERROR
CAN 错误
= Bus warning 总线报警
= Bus off 总线关闭
DRIVE ERROR
驱动器错误 OFF = OK
= Error status 错误状态
= System error 系统错误
旋转变压器接口
Multi encoder input
编码器接口
Module receptacle for memory module
存储模块插槽
Module receptacle for safety technology
伦茨9400伺服使用手册

Modular set-up (≤ 11 kW)
▪ Mounting base 安装底板
▪ Power module 功率模块
▪ Extension module 扩展模块
Next Back
3
▪ Accessories 附件
9400 Servo Drives
Target
First without engineer
rfreigabe)控制器使能 DI1 Deactivation of quick stop 快停取消 DI2 Start 启动 AI1[%] Speed setpoint 速度设定
3. Switch off the 400 V supply voltage 切断400V电源
9400 Servo Drives
Target
First without engineer
Engineer with single drive, basics of TA Structured project, further TA FB editor Multi axis applications Online alternatives
= Controller inhibited 控制器禁止
= Controller enabled 控制器使能
24 V
CAN ERROR
CAN 错误
= Bus warning 总线报警
= Bus off 总线关闭
DRIVE ERROR
驱动器错误 OFF = OK
= Error status 错误状态
= System error 系统错误
✓ ready
Next Back
5
LEDs
指示灯
伦茨9400伺服使用手册
伦茨9400伺服使用手册Welcome Practical introduction: 实用简介 L-force 9400 Servo DrivesL-force Engineer19 January 2007 Trainer: Torsten He Markus Toeberg Markus Warnecke StefanWitte 9400 Servo Drives Target Introduction to L-force 9400 and engineer First withoutengineer L-force 9400 和 engineer 的介绍 Engineer with single drive basics of TA 9400 servo drive set-up with interfaces Structured project further TA 9400伺服的接口设置 FB editor Parameter setting with Engineer and keypad Multi axis applications Onlinealternatives 通过Engineer 和操作面板进行参数设定 Technology Applications TA 技术应用 Diagnostics and configuration of the application with the function block editor使用功能块编辑器的应用配置和诊断 Next Back Multi axis application with horizontal CAN communication 2 使用CAN总线通讯的多轴应用 9400 Servo DrivesModular set-up ? 11 kW Target First without engineer Engineer with single drive basicsof TA Mounting base Structured project 安装底板 further TA FB editor Power module Multi axis applications 功率模块 Online alternatives Extension module 扩展模块Accessories Next Back 附件 3 9400 Servo Drives Interfaces at the power module Target First without engineer Engineer with single drive basics of TA CAN on board 内置CAN Structured project further TA 24 V supply and FB editor state bus 24V和状态总线 Multi axis applications Online alternatives Analog / digital IOs 2 module receptacles模拟/数字 I/O for extensions 2个扩展模块插槽 LEDs 指示灯 Diagnostic interfaceModule receptacle for 诊断接口 memory module 存储模块插槽 Resolver input 旋转变压器接口 Module receptacle for Next Multi encoder input safety technology Back 编码器接口安全模块插槽 HighLine StateLine: 1 个扩展插槽 4 9400 Servo DrivesLEDs Target First without engineer 指示灯 Engineer with single drive basics of TA CAN RUN CAN ERROR CAN 运行 Structured project CAN 错误further TA OFFCAN inactive CAN没激活 FB editor Bus warning Pre-operational 总线报警预操作 Multi axis applications Bus off Operational 总线关闭操作 Online alternativesDRIVE READY DRIVE ERROR 驱动器投入驱动器错误 OFF Pulse inhibit OFF OK due to an error 由于错误而禁止 Error status Controller inhibited 错误状态控制器禁止 System error Controller enabled 系统错误控制器使能 USER ready 24V 用户定义 Next Applicable in the application Back 在应用中使用 5 9400 ServoDrives Keypad Target First without engineer 面板 Engineer with single drive basics of TA 4 direction keys for navigation Structured project 4个方向键用于导航 further TA 2context-sensitive function keys FB editor 2个功能键 Multi axis applications Run and stop keys configurable Online alternatives 运行和停止键(可配置) Status field 状态区 Notes: 注: Diagnostic amp parameter setting only ready 仅用于诊断和参数设定Next Application is stored in the memory module Back 应用存储在存储模块中 6 9400Servo Drives Your training set-up… Target First without engineer 你的培训设置…Engineer with single drive basics of TA 2x 9400 HighLine Single Drive type 1(2个9400HighLine Structured project 单驱动型1) further TA – Extension module Ethernet (扩展模块-以太网) FB editor – Memory module MM330 (存储模块-MM330)Multiaxis applications – Safety module SM0 (安全模块-SM0) Online alternatives –Firmware version 01.51.01 (固件版本01.51.01) 2x Motor MCS06C41 with resolverand tooth wheel(2个伺服电机带旋变和齿型轮) – left Z 72 and 32 (左Z72,32)– right Z 60 and 20 (右Z60,20) Belt 皮带– left L 600 mm Z 120(左L600mm;Z120) Next – right L 535 mm Z 107 (右L535mm;Z107) Back Active application:“Actuator –speed“ (激活应用 Actuator 7 – speed) 9400 ServoDrives Exercise 1:Detect the drive status Target First without engineer by means of LEDs and keypad 通过指示灯和面板检测驱动器状态 Engineer with single drive basics of TA 1. Switch on the supply voltages 24 V and 400 V Structured project 电源上电further TA FB editor 2.Make the left drive rotate:运转左侧驱动器 Multi axis applicationsRFR Controllerenable Reglerfreigabe控制器使能 Online alternatives DI1 Deactivation of quick stop 快停取消 DI2 Start 启动 AI1 Speed setpoint 速度设定 3. Switch off the 400 Vsupply voltage 切断400V电源 4. Find out the drive status by means of the LEDs and the keypad 通过指示灯和面板观察状态 5. Make the logbook being displayed at the keypad Next 对面板显示进行记录 Back 8 9400 Servo Drives Start assistant 启动助手Target First without engineer Engineer with single drive basics of TA Structured projectfurther TA FB editor Multi axis applications Online alternatives Next Back 9 9400 Servo Drives User interface 用户界面 Target First without engineer Engineer with single drive basics of TA Work space Structured project 工作区 further TA Menu bar 菜单栏FB editor Tool bar Multi axis applications 工具栏 Onlinealternatives View bar 浏览栏Project tree 工程树 ready Next Back Messages and monitor panel 信息和监视盘 109400 Servo Drives Target First without engineer Going online 在线连接 Engineer withsingle drive basics of TA Diagnostic adapter 诊断适配器 Structured project further TACAN FB editor Ethernet TCP/IP 以太网 Multi axis applications Online alternatives Point-to-point- connection 点对点连接 ready Next 10-pole special cable Back RJ69 10芯RJ69电缆 11 9400 Servo Drives How to go online 如何连接 Target First withoutengineer Engineer with single drive basics of TA 1. Select the channel of communication 选择通讯通道 Structured project further TA FBeditor Multi axis applications 2. Start the search for devices 搜索驱动器 Online alternatives 3. Confirm the detected device 确认检测到的设备 4. Connect 连接 ready Next Back 12 9400 Servo Drives Colour represents online 在线的颜色表示 Target First without engineer Engineer with single drive basics of TA Value in the Structured project work space:工作区的颜色 further TAyellow modifiable FB editor Multi axis applications 黄可修改 Online alternativesgrey yellow read only 土黄只读 red communication error 红通讯错误NextBack 13 9400 Servo Drives Exercise 2: Detect the drive status Target First without engineer by means of the engineer 通过engineer检测驱动器状态 Engineer with singledrive basics of TA 1. Start the L-force Engineer. 启动 Structured project further TA 2.Create a new project by going online via diagnostic adapters and uploading the data fromthe right drive FB editor controller. Name the project “P ractical intro“. 创建一个新工Multi axis applications 程,并通过诊断电缆从右侧的驱动器上载数据,命名为”Practical Online alternatives intro” 3. Open the project tree. Click on the drive controller. Evaluate the drive status by means of the tab “Diagnostics”. 打开工程树,点击控制器,通过“Diagnostics”栏监控驱动器状态 4. Adapt the monitor window: Showthe “Device utilisation Ixt” as a log with a suitable resolution.观察设备利用率“Deviceutilisation Ixt”是否合适 Next 5. Save your project. 保存工程 Back 14 9400 ServoDrives Solution: Detect the drive status检测驱动器状态 Target First without engineerEngineer with single drive basics of TA Structured project further TA FB editor Multi axis applications Online alternatives Next Back 15 9400 Servo Drives Applications Target 应用 First without engineer Engineer with single drive basics of TA Application configured function of one device Structured project further TA 应用单个驱动器配置的功能 FB editor Multi axis applications How can applications be created如何建立应用, Online alternatives Two possible solutions:两个可能的方法: 1. Modify or extenda prefabricated technology application supplied by Lenze 修改和扩展伦茨预先提供的技术应用 2. Create the application completely by yourself insert “No Application” or just don’t insert any application. The empty application can be edited then within the function block editor 完全由用户自己创建(插入“No Application” 或不插入任何ready Next 应用,可以用功能块编辑器在空应用上编辑) Back 16 9400 Servo DrivesApplications supplied by Lenze…伦茨提供的应 Target First without engineer 用Engineer with single drive basics of TA are called technology applications e. g.我们称作“TA”,如: Structured project further TA – Actua.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
9300系列产品种类
各版本9300系列伺服控制器具有如下统一的硬 件: -内置电源模块-单台控制器即可完成单轴驱动, 不必像以往那样采用整流单元与速度单元的组合; -电源及回馈单元-可实现群控及多轴传动时的 节能运行; -反馈-可选择旋转变压器,正/余弦编码器, 或增量编码器反馈。
9300ES接线
a) 内部供电方式
X6 1
b. 外部供电方式
93XX
3,3nF 242R X3 100k 100k + 100k 100k GND1 X6
93XX
3,3nF 242R X3 100k 100k 100k 100k GND1
主给定 未激活
主给定
=
1 2 3 = 4 7 X6
10k
2 3
X6/3,X6/4
X6/62, X6/7
模拟量输入2
模拟量输出1
X6/63, X6/7
模拟量输出2
9300ES接线
a) 内部供电方式
控制器使能 快停 CW CCW JOG 设定故障 故障复位 内部电源 1 (+24V) 到达最小速度 准备就绪 达到最大电流
X5
28 E1 E2 E3 E4 E5 39
= 24V +
故障输出 到达最小速度 准备就绪 达到最大电流 为控制板提 供电源 Control electronics
A1 A2 A3 A4
50mA 50mA 50mA 50mA 10R
= 24V +
59
59
为了让X5/A1输出+24V电压需设定:C0005 = XX1X; 例如C0005 = 1010 内部电源供电下的速度控制方式
9300ES接线
CW rotation SIN RefSIN COS RefCOS
0.5V = 2.5V 0.5V = 2.5V
电机端编码器接 头管脚号
最大电缆长度 50 m
RefSIN SIN RefCOS COS Vcc GND -RS485 +RS485 +KTY -KTY
93XX
9 1 2 3 4 5 6 7 11 12
未激活
+
10k
4 7 X6 7
GND1 2mA 2mA -10V..+10V U -10V..+10V U
7
GND1 2mA 2mA -10V..+10V U -10V..+10V U
实际速度 内部电源
62 63
实际速度
实际电机电流
62 63
+10V
为了让X6/63输出+10V电压需设定: C0005 = XX1X ; 例如C0005 = 1010 内部电源供电下的速度控制方式
端子配置
9300ES接线
L1 L2 L3 N PE
F1
OFF K1 K1 ON
F2
F3
Z4 RB Z3
RB
K1
F4
RB1 RB2 PE +UG -UG
F5
-UG
L1
L2
L3
PE +UG
Z1
9352
Z2
U
9321 - 9333
V W
PE PE 28 A1
K1
X1
RFR
M
PE 3~
备注:如果使用直流母线,则必须使用直流快速熔断器
9300ES接线
CW
COS SIN
电机端旋变接 头管脚号
最大电缆长度. 50 m
Resolver
+REF -REF
93XX
1 2
X7
+COS
-COS +SIN -SIN +KTY -KTY
4 5 6 7 11 12
1 2 3 4 5 6 7 8 9
9 针D型接 头
KTY
– 采用双绞屏蔽线. – 两端屏蔽线均须接PE地.
X8 9 针D型 1 接头
2 3 4 பைடு நூலகம் 6 7 8 9
–编码器的供电电压可以在 5~8V间调整 – 采用双绞屏蔽线. – 两端屏蔽线均须接PE地.
KTY
9300ES接线
X4 X5/28 X5/E1...X5/ (ST) X5/A1...X5/A4 X6/1,X6/2 系统总线 控制器使能 数字量输入 数字量输出 模拟量输入1
9300系列交流伺服驱动系统
9300系列交流伺服驱动器,大功率范围交流 伺服电机以及低齿隙模块化齿轮减速机,构成了 完美的交流伺服驱动系统,可完成精确定位,复 杂轮廓加工,角度和速度同步, 收放卷控制等复 杂的伺服驱动任务。 从而广泛应用于印刷、造纸、 纺织、包装、工业机器人、高速电梯等重要行业
9300系列产品种类
9300ES接线
9300ES参数设定
控制器的参数设定的作用是使驱动器适用于 实际应用。 可将实际应用中的参数集存储。共可存储4套 参数集,因此控制器很容易由一种应用控制 调整到另一种应用控制。 参数设定的方式: 通过操作模块 通过现场总线模块及操作程序
参数结构
主菜单:包含子菜单和全部代码表 子菜单:包含将要定义的代码 代码包括: 代码级:没有子代码的代码包含一个参数,有子代码 的代码包含若干参数 参数级/运行级 有四种不同侧参数类型:物理变量的绝对值(如220V, 10S);控制变量的相对值(如50%设定值);特定状 态的数字代码(如0=控制器禁止,1=控制器启动); 显示值(如C0054下电机电流的实际值)
b. 外部供电方式
93XX
3k 3k 3k 3k 3k 3k X5
93XX
3k 3k 3k 3k 3k 3k
GND 2
控制器使能 快停 CW CCW JOG 设定故障 故障复位 (+24V)
28 E1 E2 E3 E4 E5 39
+= _
GND 2 _ 22k
_
22k
A1
A2
A3 A4
50mA 50mA 50mA 50mA 10R
9300ES接线
将屏蔽线用附件中的屏蔽板①扣紧 ,并将屏蔽板① 用螺丝固定到托 架上②
采用合适的卡子将屏蔽线安装到机 柜中的导电背板上
9300ES接线
一定要保证正 一定要与电机接头 保证正确的相序 确的相序
4 5 6 2
电机接头端子
1
1、将屏蔽线用附件中的屏蔽板①扣紧,并将屏蔽板① 用螺丝固定到托架上②。 2、如果电机温度传感器的出线在电机电缆上须接T1和T2.但大多数温度传感器的出线在反馈接 线上。 3、应严格按照EMC规范要求布线,控制电缆与动力电缆必须分开布局。屏蔽线需双端接地。 4、绝大多数现场总线通讯故障、控制紊乱是因为屏蔽、接地不规范造成。
9300ES接线
CW rotation
A A B B Z Z
电机端编码器接 头管脚号
最大电缆长度 50 m
B B A A Vcc GND Z Z +KTY -KTY
93XX
9 1 2 3 4 5 6 7 11 12
X8 9 针D型 1 接头
2 3 4 5 6 7 8 9
KTY
–编码器的供电电压可以在 5~8V间调整 – 采用双绞屏蔽线. – 两端屏蔽线均须接PE地.