赫兹接触有限元分析
应用ABAQUS求解赫兹接触问题

180 4.36585×10-3 1.00000×10+1 0.00000×10+0 -5.05433×10-6 -5.26819×10-4 0.00000×10+0 1.52215 306.6 接触
179 8.91565×10-3 1.00000×10+1 0.00000×10+0 -1.02204×10-5 -5.21557×10-4 0.00000×10+0 1.50565 284.1 接触
机械
2009 年第 3 期 总第 36 卷
设计与研究
·11·
应用 ABAQUS 求解赫兹接触问题
朱子宏,魏宪军
(上海大学 机电工程与自动化学院,上海 200072) 摘要:以面面接触为例,运用 ABAQUS 对两长圆柱体的接触问题进行分析,通过有限元分析计算结果与赫兹解进行比 较。 在分析中估算接触区域, 并对该接触区域进行局部网格细划, 在保证计算结果的精度要求同时减少系统的资源消耗。 同时在利用 ABAQUS 求解接触问题时,接触体的接触区及附近区域的单元网格边长应不大于赫兹接触面半宽,且小于 赫兹接触面半宽的 50%时为佳,以满足有限元分析结果精度的需要。 关键词:赫兹接触;ABAQUS;有限元分析 中图分类号:TH123.4 文献标识码:A 文章编号:1006-0316 (2009) 03-0011-03
机械
2009 年第 3 期 总第 36 卷
设计与研究
半宽,最好小于接触面半宽的 50%。
·13·
提取接触区节点计算结果时必须首先判定每一 个节点的接触状态。节点法向接触应力 CPRESS>0 时节点处于接触状态,否则为不接触状态。 接触区的最大法向应力应为所有处于接触状态 节点的 S22(法向)应力的最大值。要特别注意节 点选取方式,节点选取方式不同有可能导致节点的 应力不同。因此应选择正确的选择方式提取结果。 接触面半宽应为最远一个接触节点的 X 坐标值 与该节点的 Ux 方向位移值的和,即 R=X+Ux。
钻机人字架销轴有限元接触应力分析
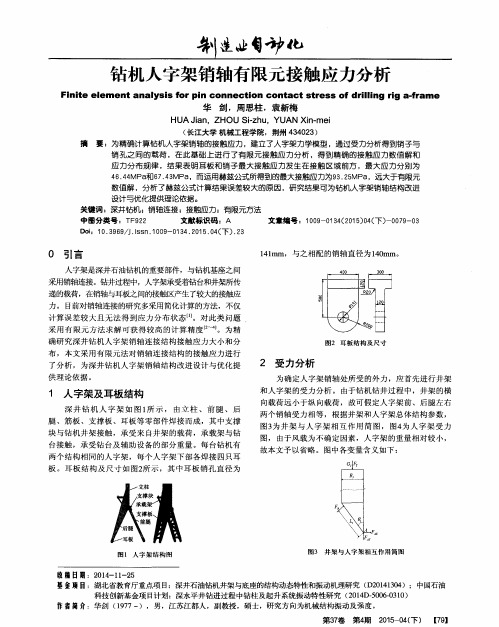
图 2 耳 板 结 构 及 尺 寸
2 受力分析
为确 定人 字架 销 轴处 所 受 的外力 ,应 首 先进 行井 架 和 人字 架 的受 力分 析 。由于钻 机 钻井 过程 中,井 架 的横
向载荷 远 小于 纵 向载 荷 ,故可 假 定人 字架 前 、后 腿左 右
1 人 字架及耳板结构
深井 钻机人 字架如 图 1 所 示 , 由立 柱 、 前 腿 、 后
0 引言
人字架 是深井石 油钻 机的重要 部件 ,与钻机基 座之 间
1 4 1 m m , 与 之相 配的 销轴直 径为1 4 0 m m 。
采用销轴连接。 钻井过程中,人字架承受着钻台和井架所传
递的载荷 ,在销轴 与耳板之 间的究 多采用简化 计算的方法 ,不仅 计 算误 差 较 大 且无 法 得 到应 力 分 布状 态 Ⅲ。对 此类 问题
收 稿 日 期 :2 0 1 4 -1 1 -2 5
基金项目:湖北省教育厅重点项 目:深 井石油钻机井架与底座的结构动态特性和振动机理研究 ( D 2 0 1 4 1 3 0 4 );中国石油 科技 创新基金项 目计划 :深水平井钻进过程 中钻柱及起升 系统振 动特性研 究 ( 2 0 1 4 D 一 5 0 0 6 — 0 3 1 0 ) 作者简介:华剑 ( 1 9 7 7一),男,江苏江都人 ,副教授 ,硕士 ,研 究方 向为机械结构振 动及强度 。
2 4。 :
o f n a 【 )
( 8 )
F R 为井 架 与人字 架之 间 的正压 力 ,K N; L 为F 距 井架 与 基 座销 轴 A 的 距离 ,F 距 人 字架 与
中图分类号 :T F 9 2 2 文献标 识码 :A 文章编号 :1 0 0 9 -0 1 3 4 ( 2 0 1 5 ) 0 4 ( 下) - 0 0 7 9 -0 3
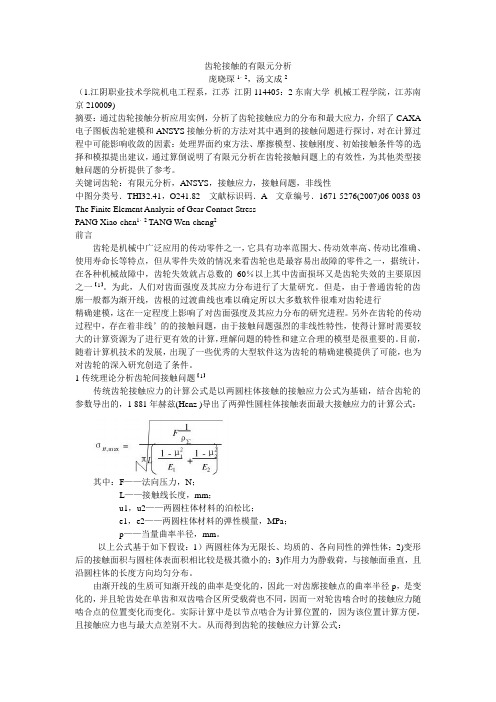
ansys齿轮接触分析案例

加载与求解
01
施加约束
根据实际情况,对齿轮的轴孔、 端面等部位施加适当的约束,如 固定约束、旋转约束等。
02
03
施加接触力
求解设置
根据齿轮的工作状态,在齿面之 间施加接触力,模拟实际工作情 况。
设置合适的求解器、迭代次数、 收敛准则等,确保求解的准确性 和稳定性。
后处理
结果查看
查看齿轮接触分析的应力分布、应变分布、接触压力分布等 结果。
02
分析接触区域的大小、应力分布情况,评估齿轮的传动性能和
寿命。
根据分析结果,优化齿轮的设计和制造工艺,提高其传动性能
03
和寿命。
06
CATALOGUE
ansys齿轮接触分析案例四:蜗轮蜗杆
问题描述
蜗轮蜗杆传动是一种常见的减速传动 方式,具有传动比大、传动平稳、噪 音低等优点。但在实际应用中,蜗轮 蜗杆的接触问题常常成为影响其性能 和寿命的关键因素。
属性。
边界条件和载荷
01
约束蜗杆的轴向位移,固定蜗轮的底面。
02 在蜗杆的输入端施加扭矩,模拟实际工作状态。
03 考虑温度场的影响,在模型中设置初始温度和环 境温度,并考虑热传导和热对流。
求解和结果分析
进行静力分析和瞬态动力学分析,求解接触应力 分布、摩擦力变化以及温度场分布等。
对求解结果进行后处理,提取关键数据,进行可 视化展示。
通过齿轮接触分析,可以发现潜在的 应力集中区域和齿面磨损问题,提高 齿轮的可靠性和寿命。
齿轮接触分析的应用领域
汽车工业
用于研究汽车变速器、发动机和传动系统中的齿轮接触行为,优 化齿轮设计以提高燃油经济性和可靠性。
风电领域
用于研究风力发电机组中齿轮箱的齿轮接触行为,提高风力发电设 备的效率和可靠性。
球笼式等速万向节滚道接触应力的有限元分析

Ma.0 1 r 1 2
机 械 设 计 与 制 造
5 1
析, 设置对应的时间步和载荷 步 , 将不同的滚 道截 面类 型的万 向 3 有限元分析结果与赫兹接触理论计算值的比较分析 . 3 节按照以上方法建立对应的有 限元模 型, 然后分别运行求解 。计 将以上通过有限元分析方法计算出的不 同滚道截面类型 的 算结束后 , A S S 在 N Y 后处理模块 中, 查看球笼式万 向节受力状态 万 向节的内外滚道 的最大接触应力 的数值解 同参照文献 中通过 下的等效应力云图, 本文计算出的接触应力 , 采用 ynMi s o s 屈服 赫兹接触理论方法计算出的理论值进行比较 , 以验证有 限元方 e 用 准则表示为等效应力 。 其不同滚道截面类型的万向节 内外滚道接 法的可行可信性 。将数值解与理论值通过相对误差公式 :
进行误差比对 。其接触应力大小及误差 比较 , 如表 1 所示 。
MP ) 如图 9 图 1 所示 , 、 2 双心弧型截面滚道类型的万 向节 内滚道 表 1接触应力数值解与理论值比较( a
如图 l 、 1 所示 , 0图 3 椭圆型截面滚道类型 的万 向节 内滚道 最大接触应力 为 3 MP , 36 a外滚道最大接触应力为 20 M a 1 78 P 。 由有 限元分析结果可知 ,三种不 同滚道截面类 型的万 向节 的内滚道的接触应力都普遍 大于外滚道上 的接触应力 , 星形套 内
19 ( ) 1— 3 9 9 3 :2 1
3 陈静. 轿车驱动轴等速 万向节结构强度的有限元分析 [ ] D . 大学学 吉林
报 ,0 5 8 20 ( )
4 汤双清 , 欢. 胡 球笼式 等速万 向节三点 接触沟道 的设计 分析[ ] 承 , J. 轴
齿轮接触的有限元分析
齿轮接触的有限元分析庞晓琛1、2,汤文成2(1.江阴职业技术学院机电工程系,江苏江阴114405:2东南大学机械工程学院,江苏南京210009)摘要:通过齿轮接触分析应用实例,分析了齿轮接触应力的分布和最大应力,介绍了CAXA 电子图板齿轮建模和ANSYS接触分析的方法对其中遇到的接触问题进行探讨,对在计算过程中可能影响收敛的因素:处理界面约束方法、摩擦模型、接触刚度、初始接触条件等的选择和模拟提出建议,通过算倒说明了有限元分析在齿轮接触问题上的有效性,为其他类型接触问题的分析提供了参考。
关键词齿轮:有限元分析,ANSYS,接触应力,接触问题,非线性中图分类号.THI32.41,O241.82 文献标识码.A 文章编号.1671-5276(2007)06-0038-03 The Finite Element Analysis of Gear Contact StressPANG Xiao-chen1、2 TANG Wen-cheng2前言齿轮是机械中广泛应用的传动零件之一,它具有功率范围大、传动效率高、传动比准确、使用寿命长等特点,但从零件失效的情况来看齿轮也是最容易出故障的零件之一,据统计,在各种机械故障中,齿轮失效就占总数的60%以上其中齿面损坏又是齿轮失效的主要原因之一【1】。
为此,人们对齿面强度及其应力分布进行了大量研究。
但是,由于普通齿轮的齿廓一般都为渐开线,齿根的过渡曲线也难以确定所以大多数软件很难对齿轮进行精确建模,这在一定程度上影响了对齿面强度及其应力分布的研究进程。
另外在齿轮的传动过程中,存在着非线’的的接触问题,由于接触问题强烈的非线性特性,使得计算时需要较大的计算资源为了进行更有效的计算,理解问题的特性和建立合理的模型是很重要的。
目前,随着计算机技术的发展,出现了一些优秀的大型软件这为齿轮的精确建模提供了可能,也为对齿轮的深入研究创造了条件。
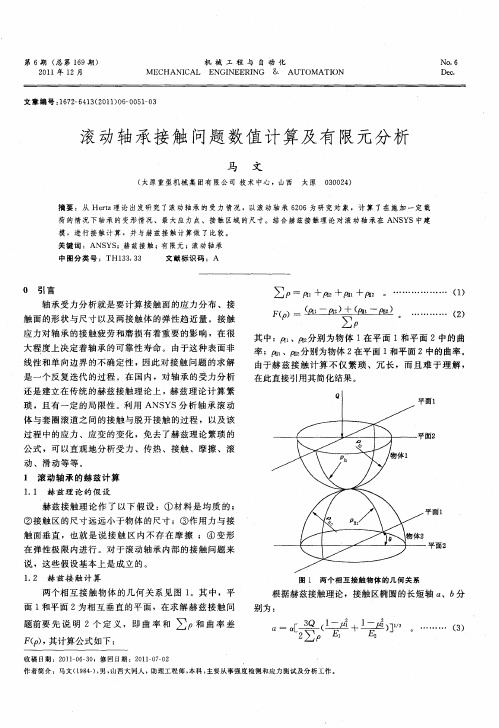
1传统理论分析齿轮间接触问题【1】传统齿轮接触应力的计算公式是以两圆柱体接触的接触应力公式为基础,结合齿轮的参数导出的,1 881年赫兹(Henz )导出了两弹性圆柱体接触表面最大接触应力的计算公式:其中:F——法向压力,N;L——接触线长度,mm;u1,u2——两圆柱体材料的泊松比;e1,e2——两圆柱体材料的弹性模量,MPa;p——当量曲率半径,mm。
第26讲赫兹接触问题

§10.5 赫兹接触问题学习思路:1881年,赫兹(hertz,H.R)首先研究了弹性球体的接触问题。
本节以弹性球体的接触介绍接触问题的基本概念。
由于球体的接触区域对于弹性球体是局部,因此,弹性球体的接触问题可以以半无限平面分布载荷解为基础,分析接触区域的局部变形。
这里的问题是球体接触压力是未知函数,因此必须首先根据球体的变形确定未知接触压力。
赫兹认为接触区域(半径为a的圆)的压力与接触区域半球面的纵坐标成正比。
根据这一假设和球体变形分析,可以确定接触压力分布函数和接触区域。
进一步的讨论可以确定球体的接触应力和变形。
学习要点:1. 弹性球体变形分析;2. 球体接触压力分析。
设弹性球体的半径分别为A1和A2,变形前两球体在O点接触(相切)。
两个球体在其中心均受集中力F的作用,变形后球体在半径为a的圆形区域接触。
接触区域内任意一点与中心的距离为ρ,并且球体在ρ的沉陷分别为ζ1,ζ2,则其中。
由于接触区域对于弹性球体是局部,因此ρ 远小球体的半径A1和A2, 因此可以采用半无限平面解答分析接触局部变形。
对于两球体距离接触面足够远的任意两点A1和A2,由于相互压缩而相互接近的距离为δ,相对位移分别为w1和w2,则如果将球体接触面看作弹性半无限体作用圆形区域分布载荷问题,A1和A2为球体接触面上的点,则位移为其中, E1,ν1和E2,ν2分别为球体R1,R2的弹性模量和泊松比。
则应该注意的是,这里接触压力q是未知函数,因此,首先必须确定圆形区域的接触分布载荷。
赫兹认为接触区域的接触压力与接触区域半球面的纵坐标成正比。
根据这一假设和球体变形分析,可以确定接触压力分布函数和接触区域,有其中q max为接触区域中心的压力,ρ sinψ 为接触区域内部任意一点与接触区域中心的距离。
如图所示,因为s长度mn为。
s长度mn中点的压力为q(ρ),所以因此,,回代可得因此。
圆形接触区域的半径为。
最大接触压力为。
赫兹接触

Hertz接触理论研究两物体因受压相触后产生的局部应力和应变分布规律的学科。
1881 年H.R.赫兹最早研究了玻璃透镜在使它们相互接触的力作用下发生的弹性变形。
他假设:①接触区发生小变形。
②接触面呈椭圆形。
③相接触的物体可被看作是弹性半空间,接触面上只作用有分布的垂直压力。
凡满足以上假设的接触称为赫兹接触。
当接触面附近的物体表面轮廓近似为二次抛物面,且接触面尺寸远比物体尺寸和表面的相对曲率半径小时,由赫兹理论可得到与实际相符的结果。
在赫兹接触问题中,由于接触区附近的变形受周围介质的强烈约束,因而各点处于三向应力状态,且接触应力的分布呈高度局部性,随离接触面距离的增加而迅速衰减。
此外,接触应力与外加压力呈非线性关系,并与材料的弹性模量和泊松比有关。
实际工程中的很多接触问题并不满足赫兹理论的条件。
例如,接触面间存在摩擦时的滑动接触,两物体间存在局部打滑的滚动接触,因表面轮廓接近而导致较大接触面尺寸的协调接触,各向异性或非均质材料间的接触,弹塑性或粘弹性材料间的接触,物体间的弹性或非弹性撞击,受摩擦加热或在非均匀温度场中的两物体的接触等。
对以上问题的研究已取得不少成果。
Hertz接触-假设Hertz接触在讨论弹性接触问题时,一般假定:(1)接触系统由两个相互接触的物体组成,它们间不发生刚体运动;(2)接触物体的变形是小变形,接触点可以预先确定,接触或分离只在两物体可能接触的相应点进行;(3)应力、应变关系取线性;(4)接触表面充分光滑;(5)不考虑接触面的介质(如润滑油)、不计动摩擦影响。
应力Hertz接触当两曲面接触并压紧时,压力P沿z轴作用,在初始接触点的附近,材料发生局部的变形,靠近接触形成一个小的椭圆性平面,椭圆的长半轴“在x轴上,短半轴b在y轴上。
椭圆形接触面上各点单位压力大小与材料的变形量有关,z轴上的变形量大,沿Z轴将产生最大单位压力凡。
其余各点的单位压力p是按椭圆球规律分布的。
Hertz接触-有限元分析Hertz接触随着计算机技术的发展、有限元法的成熟以及大型有限元商业软件的面世,使得接触分析的数值算法成为可能。
滚动轴承接触问题数值计算及有限元分析
节点单 元 ,采 用 C wt4 o a 8单 元 进 行 分 析 ,有 限元 模 型如 图 2 示 。然后对 轴承进行 约束 ,在 Y方 向施加 所 了 ~0 0 5mm的位 移约束 ,并且施 加 载荷进 行 求解 。 . 0
图 3为模 型 的网格划 分 ,图 4为 Y方 向的应力 图 ,图 5为其等 效应力 图 。
M A e W n
( c n lg n e fTay a a yM a hneyGr u ., d. Tay a 0 2 Chn ) Te h oo yCe tro iu n He v c i r o p Co Lt , iu n03 0 4, ia
Ab ta t sr c :Th te so h o lr b a i g i r s a c e t h h o y o r z o u i g o h y e o o l g b a i g 6 0 .Th e s r s ft er l e rn s e e r h d wi t e t e r fHe t ,f c sn n t e t p f r l n e rn 2 6 e h i e d f rf t n o h ol g b a i g a d t eb g e ts r s o n n h ieo h o t c r a u d r t e c ra n l a r ac lt d eo r a i ft er l n e rn n h i g s te sp i ta d t e sz ft e c n a t a e n e h e t i o d a e c lu a e . o i W i r sc n a t h o y h s p p rb i st emo e f h o l g b a i g i t He t o t c e r ,t i a e u l h d l er i n e r ANS n a c l ts c n a tp o l ms h t d o t i n n YS a d c l u a e o t c r b e ,me n i , a wh l e
基于ANSYS的球轴承赫兹接触问题有限元分析

1
引
言
Po=1.59/(耵n6)(N/mm2)
(3)
接触问题是研究两个曲面物体相互挤压时在接 触部位邻近的应力和变形,可以说接触应力和变形的 计算是滚动轴承分析的基础。由于采用传统赫兹理 论公式进行求解时存在许多不便…,近年来随着各 种商用有限元分析软件的逐步发展,使设计者不必掌
握非常专业的知识,又避免了复杂数学公式的计算,
基于ANSYS的球轴承赫兹接触问题有限元分析
李一耕,陈锦江,龙超,张勋兵,文杰
(燕山大学机械工程学院,河北秦皇岛066004)
摘要:以推力球轴承的赫兹接触问题为例,介绍ANSYS软件的接触分析功能和建模的方法,基于ANSYS软件面一面
・机械研究与应用・一
研穷与分析
文章编号:1007—4414(2011)05-0035—03
已逐渐成为分析滚动轴承的有效手段【l J。 ANSYS软件是一功能强大应用广泛的大型通用 有限元分析软件旧“J,笔者提出基于该软件的面一面 接触方式中的柔一柔接触类型进行推力球轴承赫兹 接触问题三维有限元分析的新方法,介绍了软件的接 触分析功能和建立模型的方法,将最大接触应力和变 形的计算误差的主要原因。
engineering,Yanshan
university,Qinhuangdao
is
066004,China)
on
Abstract:Hertz elastic contact problem of the thrust ball
be鲥ng
analyzed鼬an example in this paper based
作者简介:李一耕(1985一)。女,河北唐山人。硕士。研究方向:数字化设计制造。
万方数据
基于有限元方法的WN齿轮啮合仿真与接触分析

Si m ula tion of M esh in g and Con tact Ana lysis of W N Gears Ba sed on F in ite Elem en t M ethod 1 2 1 Chen D ianhua , Tanaka M ichihiko , Shang Guizhi (1 M echanical Engineering College, Dalian University, Dalian 116622; 2 Engineering College, Shinshu University, Nagano, Japan ) Abstract: In this study, a three 2dim ensional finite elem ent m ethod is adop ted to analyze the contact state and strength of WN (W ildhaber2 Novikov) gears . The analysis of m eshing and contact of gears w ith com 2 puterized si m ulation has m ade a significant contribution to these gears . The load distribution on the con2 tact zone of m ating tooth surfaces has been investigated because of its comp lexity in modeling . The study starts from tooth generation analysis and then establishes teeth 2 m eshing models . The finite elem ent method is adop ted to calculate the elastic defor m ation of teeth and contact stresses and to si m ulate tooth 2 m ating p rocesses . It is the first tim e that normal gap method and unit partitioning method have been introduced into the field of contact analysis . Besides, the study has calculated the contact stresses and zones of WN gear teeth m eshing under different loadings . The gears′ structaral analysis softw are has been developed. Key words: meshing sim ulation; contact analysis; unit partitioning method; WN gears
滚动轴承接触问题的有限元分析

滚动轴承接触问题的有限元分析马士垚张进国(哈尔滨工业大学(威海)机械工程系,威海264209)Contact analysis on rolling bearing by finite element methodMA Shi-yao ,ZHANG Jin-guo(Department of Mechanical Engineering ,Harbin Institute of Technology ,Weihai 264209,China )文章编号:1001-3997(2010)09-0008-02【摘要】基于ANSYS 有限元分析软件,建立了滚动轴承接触分析的三维有限元模型,分析得到了轴承滚动体的径向位移、滚动体与内外圈的接触应力云图,并将接触应力结果与Hertz 理论计算的结果对比,计算两者的接近度,进而说明该法分析的可行性,也为轴承的进一步研究提供了理论基础。
关键词:ANSYS ;滚动轴承;有限元;接触分析【Abstract 】A three-dimensional model is first established for rolling bearing based on an FEA soft -ware as ANSYS .The bearing ’s radial displacement 、the contact stress between rolling elements and inner and outer ring is pared the contact stress results of ANSYS with the Hertz results ,see the difference between each other ,so that the feasibility of this method is proved ,also provides theoretical principle for further research.Key words :ANSYS ;Rolling bearing ;Finite element ;Contact analysis中图分类号:TH133.33文献标识码:A*来稿日期:2009-11-131前言轴承是机械传动部分中的重要组成部分,在对轴承的设计与分析中,经常要计算轴承的承载能力、寿命、变形等问题,由于传统的赫兹接触理论在实际应用中存在局限性,只能得到轴承接触应力的近似解,而且求解方法繁琐,利用有限元分析软件ANSYS 对轴承进行接触问题的分析,可以解决所有的赫兹接触问题,方法简洁,易于程式化,结果可视性强,对轴承的分析有一定的指导作用。
赫兹接触

目录
[隐藏]
• 1 历史 • 2 接触力学中的经典问题
o 2.1 球体和弹性半空间的接触 o 2.2 两个相同半径的圆柱体交叉接触 o 2.3 刚性圆柱体和弹性半空间的接触 o 2.4 刚性圆锥体和弹性半空间的接触 o 2.5 两个中心轴平行的圆柱体间的接触 o 2.6 粗糙表面间的接触 • 3 参考文献
基本步骤
1.建立模型,并划分网格 2.识别接触对 3.定义刚性目标面 4.定义柔性接触面 5.设置单元关键字和实常数 6.定义/控制刚性目标面的运动 7.给定必须的边界 8.定义求解选项和载荷步
9.求解接触问题一查看结果
接触力学
接触力学的范围集中在弹性体、粘弹性体和塑性体在静态和动态接触中的计算。接触力 学是机械工程的基本领域,它为技术系统的安全和能量的有效设计提供了必要的信息 。 接触力学的原理应用于很多领域,例如机车轮-轨接触,联接装置,刹车系统,疲劳, 衬套,球轴承,内燃机,机械连接,密封垫片,金属加工,金属成型,超声波电焊 ,电 接触等等。该领域目前面临的挑战包括接触应力分析、耦合数、润滑油影响和摩擦磨损 上的材料设计。接触力学的应用更可以扩展到微粒子和纳米技术领域。
参考文献
• Johnson, K. L.: Contact mechanics. Cambridge University Press, 6. Nachdruck der 1. Auflage, 2001.
• Popov, Valentin L.: Kontaktmechanik und Reibung. Ein Lehr- und Anwendungsbuch von der Nanotribologie bis zur numerischen Simulation, Springer-Verlag, 2009, 328 S., ISBN 978-3-540-88836-9.
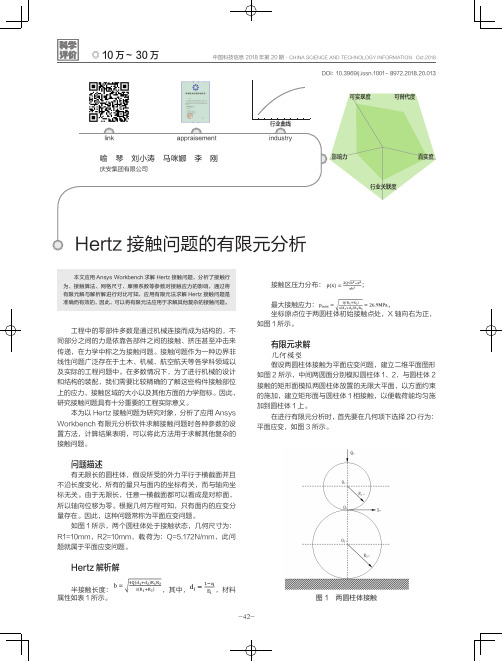
Hertz接触问题的有限元分析
link appraisement
喻 琴 马咪娜 李 刚
庆安集团有限公司
;
最大接触应力:
坐标原点位于两圆柱体初始接触点处,X 半接触长度:,其中,,材料
图1 两圆柱体接触
图2 几何模型
图3 平面应变设置
图4 有限元模型
有限元模型
采用4节点四边形单元对两圆柱体接触模型进行网格划
分,由于本文的目的是为了研究两圆柱体之间的Hertz
应力分布情况,故为了提高计算效率并保证计算结果的精度,
对上、下两矩形面网格划分粗一些,对两圆柱体特别是接触
部位网格划分细一些。
经过多次的试算确定计算结果收敛到
稳定的数值,此时单元数为79884,节点数为240960,两
圆柱体接触有限元模型如图4所示。
材料属性
两圆柱体的材料参数为:弹性模量为E1=4000N/
,E=4000N/mm2,泊松比为υ=0.3,υ=0.3。
矩
图5 接触设置
图8 接触应力云图
图6 约束与载荷
图9 穿透量云图
的基础上,仅将两圆柱体之间的接触由无摩擦改为摩擦,并
分别取摩擦系数为0.2、0.5进行计算,其余设置均不变,
图7 约束反力
2.7×10-9mm,可以忽略,说明计算结果是合理的。
参数分析
(1)接触行为分为对称接触和非对称接触两种,确定
接触行为后,再选择支持此行为的接触算法。
为了对两种接
触行为进行对比,在原计算文件的基础上,仅将非对称行
为改为对称行为,相应地将接触算法改为支撑对称行为的。
基于ANSYS的球轴承赫兹接触问题有限元分析
Ab t a t s r c :He t ea t o tc r be o e t r s alb a i g i a a y e s a x mp e i h s p p r b e n s f r r lsi c n a t o lm ft h u t l e r s n l z d a n e a l n ti a e a d o ot e z c p h b n s wa ANS S C n a t u cin a d F M ul i g t c n q e o h o t r r n r d c d Y . o tc n t n E b i n e h i u ft e s f f o d wae ae i to u e .Ma i m o tc t s n eo ma xmu c n a ts e s a d d fr - r t n r o y u i gfe i l — o f x b e s ra e t — u fe o t c lme t o e s f a e n c mp rs n w t h e u t i s a e g t s x b e t — e i l u f c — o s ra e c n a t e n s ft ot r .I o aio i t e r s s o b n l l e h w h l
9 6 x1 q m 8=7 4 9 x1 一m 。 2 8 0r / 。 .2 5 0
的性能与配置要求较高。
ANSYS在求解带摩擦接触问题中的应用
2 ANSYS 求解赫兹接触问题
通过求解两长圆柱体在平行于轴线方向上 带摩擦接触问题, 可以对有限元分析结果和传 统的赫兹理论的计算结果进行比较。 211 几何模型
131 043
131068
01 000
01000
01000
01 000
01 000
- 01 737E- 02 - 01142E- 01 - 01203E- 01 - 01 248E- 01 - 01 270E- 01
- 01 229
- 01236
- 01247
- 01 264
- 01 285
01 209E- 01 01 194E- 01 01170E- 01 011340E- 01 01 859E- 02
直径分别为 D 1= 20 mm 和 D 2 = 26 mm 的 两个长圆柱体, 材料均为 GCr15 制造, 在平行于 轴线方向上带摩擦接触, 单位长度上的作用力 F = 3 200 N/ mm, 该力将两长圆柱压在一起( 如 图 1 所示) , 求取接 触椭圆尺 寸和应 力、变形。 对于本例中, 接触椭圆的长轴和短轴半径相等, 接触区为圆, 另外, 通过调整不同的接触刚度值 比较结果, 说明在接触分析中法向接触刚度是 否合理选取严重影响计算的精确性和问题的收 敛性。
第 11 卷 第 4 期 2003 年 12 月
北京石油化工学院学报 Journal of Beijing Institute of
Petro- chemical Technology
齿轮啮合接触单元的有限元法

齿轮啮合接触单元的有限元法有限元法的应用分为三种类型,第一种是使用有限元法求在给定载荷作用下的轮齿变形。
在轮齿弹性变形的分析中,人们主要关怀啮合点处的弹性变形。
在一般的有限元分析中,往往是将轮齿啮合点处理成啮合力的作用点,这样计算得到的变形实际上是集中力作用下的啮合点变形。
但由于弹性变形,啮合点实际上成为啮合接触面,啮合力是一种分布力而不是集中力,因此在利用有限元法时,将分布力简化成集中力及将接触面简化成接触点会产生较大的误差。
为了减小这种误差,提出了一种通过选择与接触区面积相对应的有限单元尺寸来补偿的方法,通过对曲率相同的圆柱体的有限元分析,借助于转变接触区的有限元尺寸,讨论有限元分析结果与赫芝接触变形间的关系,从而确定将啮合力处理成集中力时为了减小上述误差应在接触区四周选择的有限单元的尺寸。
然而这种分析都是以单一轮齿作为分析对象,故此分析模型不能考虑多对轮齿同时啮合时相邻轮齿的影响。
其次种是采纳接触单元的有限元法,考虑多对轮齿的同时啮合及轮齿的接触变形,进行轮齿的啮合分析。
它是一种计算非赫芝型接触问题的数值方法,适用于求解多对轮齿同时啮合的变形和应力状态。
由于弹性接触问题有限元法是建立在弹性理论基础上的,因此这种分析得到的结果实际上包含了轮齿的弯曲、剪切、接触压缩等各种变形,利用这种方法可得到多齿同时啮合的变外形态和应力状态,并且可以嵌入轮齿误差。
因此,利用此方法进行啮合接触分析,可求得齿轮啮合的静传递误差。
如利用三维接触问题有限元模型进行啮合接触分析,得到啮合静传递误差。
但若用接触单元的有限元法来处理象某型舰用齿轮箱的振动模态分析,会遇到单元数量过多,大多数软件包的接触单元不能进行振动模态计算的问题,现有的计算条件难以完成这种问题的解算。
第三种是考虑齿轮啮合齿面的弹性液体动力润滑,除了有其次种方法的问题外,花纹输送带还有液固耦合问题,现有的计算条件也难以满意要求。
故还需探究适合于大型简单结构的方法,这项工作将在另文中进行争论。
———计算接触应力的基本值

———计算接触应力的基本值
计算接触应力的基本值是为了评估两个物体之间的接触情况以
及材料的耐久性。
接触应力是指在两个物体接触点上的应力分布情况。
根据物体接触的类型和形状,可以使用不同的方法来计算接触应力的基本值。
以下是一些常见的计算方法:
1. Hertz接触理论:适用于弹性材料的接触。
该理论基于Hertz接
触理论,使用接触半径和物体之间的力来计算接触应力的基本值。
这个方法非常常见,特别适用于球形和圆柱形接触。
2. 承载能力计算:适用于承受高载荷的接触。
这个方法根据材料的
强度和接触面积来计算接触应力的基本值。
承载能力计算可以用于设计和评估承受重载或高压的结构。
3. 有限元分析:适用于复杂的接触情况。
有限元分析是一种计算机
模拟方法,可以精确地计算接触应力的基本值。
它将接触问题分解为许多小区域,并使用数值方法来计算每个区域的应力分布。
这个方法可以用于模拟任意形状和复杂的接触情况。
除了这些常见的计算方法,还有一些其他的方法,例如使用解析模型、实验测试等。
根据具体的应用和要求,选择合适的计算方法是非常重
要的。
需要注意的是,计算接触应力的基本值只是一个起点,实际的接触应力可能受到许多其他因素的影响,例如温度、摩擦、表面粗糙度等。
因此,在实际应用中,还需要进行更加详细的分析和考虑各种因素的影响。
有限元法在分析轴承接触问题中的应用
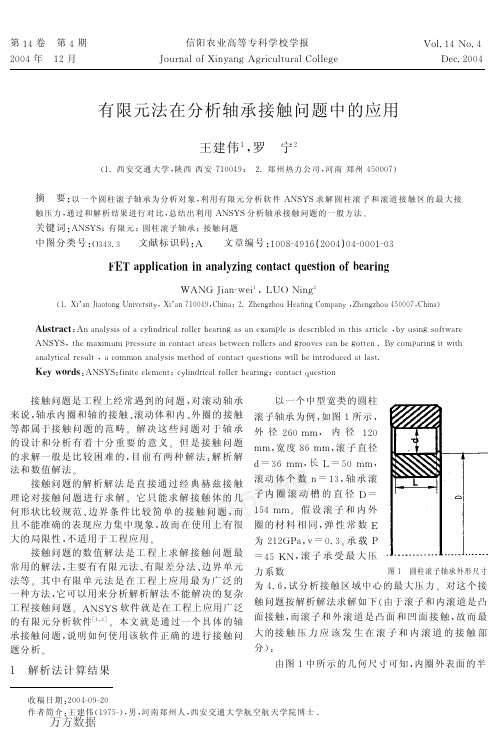
寸很重要 " 从上 面 的 分 析 结 果 和 相 应 参 考 资 料 可 以 得出 ! 非接触区的单元尺寸一般可以确定为整体尺寸 的十分之一以下 ! 接触区的单元尺寸一般定在理论计 算得到的接触区尺寸的五分之一以下 ! 这样得到的分 析结果具有一定的可靠性 ! 和理论值的误差在 @a 以 内 " 这个结论对于分析复杂的接触问题同样适用 " # $ 一般 来 说 ! @ 4’ = > =分析结果随着分网等级 的提高而收敛 于 真 值 ! 所 以 在 对 分 析 结 果 的 判 定 上! 可以通过对上一 次 分 析 模 型 的 细 化 ! 重 新 分 析! 比较 前后两次结果相拟和的程度 ! 来确定所分析的接触问 题的真实解的大小和范围 " 参考文献 #
接触问题的有限元分析

pT
ET u T
g pT
v 0
v 0
v 0
0
有了上述摩擦接触条件的互补关系,就可以利用参
变量变分原理或虚功原理建立摩擦接触问题的有限元二 次规划(线性互补)模型。
对这类线性互补问题常采用Lemke 算法求解。
6.1 接触边界的有限元算法
(2)接触约束算法 3) 数学规划法 对三维摩擦接触问题,为了能利用线性互补方法求解,通 常以多面体棱锥近似代替Coulomb 圆锥,从而实现滑动函数的 线性化,但该方法大大增加了问题的求解规模。 为了尽量减少线性化所增加的求解规模,有的学者又提出 了参数二次规划迭代算法、序列线性互补方法等。 三维摩擦接触问题本质上属于非线性互补问题,由此出发 可以建立非线性互补接触力法模型和非线性互补接触位移法模 型。 数学规划方法在弹塑性接触问题的应用上通常用迭代法反 映材料非线性特征,在每次迭代中用数学规划方法求解接触问 题。 钟万勰等利用参变量变分原理将接触问题和弹塑性问题表 示成具有相同形式的有限元参数二次规划问题, 很方便地实现 了弹塑性接触问题的数学规划解法。
U
1 2
λT
E
p
1
λ
6.1 接触边界的有限元算法
(2)接触约束算法
2) Lagrange 乘子法与增广Lagrange 乘子法
U
1 2
λT
E p
1
λ
min
U,
λ
1 2
ቤተ መጻሕፍቲ ባይዱUT
K
U
UT
F
g
U
T
λ
1 2
λT
Ep
λ
U
1 2
λT
Ep
1
λ
赫兹接触_精品文档

15
Hertz接触理论
设开始时两球体不受压力作用,它仅接触于一点O,那么此 时,在两球体表面上取距公共法线距离为r的M1和M2两点 ,与O点的切平面之间的距离z1和z2. 则由几何关系有:
(R1-z1)2+r2=R12 (R2-z2)2+r2=R22
得
r2 z1 2R1 z1
R1
R2 ) 3
由此并可求得最大接触压力为;
2
q0
3P
2a2
32Fπ
4(R1 R2 3πF (k1 k2 )
) R1R2
3
2023/10/24
27
Hertz接触理论
在E1=E2=E及ν1= ν 2=0.3时,由上列各式得出工程实践中
广泛采用的公式:
1
a
1.11
FR1R2 E(R1 R2
• 如图所示为两个物体的接 触示意图,在两个主平面 上具有不同的曲率半径 ρ1、ρ2。在载荷F 的作 用下接触,当载荷Q为0 时,接触为一点,当载荷 逐渐增大,接触区域应力 值变化成一椭圆。
2023/10/24
5
Hertz接触理论
点接触的两物体,在负荷Q的作用下,接触区域将扩展成为一个接触面。 该接触面在与接触法线垂直面的投影为一椭圆,长轴为2a,短轴为2b。
的R1,则可得:
1
a
3 4
R1R2 R2 R1
1
E1
2 1
1
2 2
E2
F
3
1
9 16
R2 R1 R1R2
1
E1
2 1
1
2 2
E2
2
F2
3
1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
! Generate the target surface
LSEL,S,,,5
CM,_TARGET,LINE
TYPE,2
NSLL,S,1
ESLN,S,0
ESURF
CMSEL,S,_ELEMCM
! Generate the contact surface
/FILNAME, HERTZ CONTACT ANALYSIS,0
/PREP7
ET,1,PLANE183
KEYOPT,1,1,0
KEYOPT,1,3,2
KEYOPT,1,6,1
!定义材料参数
MPTEMP,,,,,,,,
MPTEMP,1,0
MPDATA,EX,1,,2.11e8
!设置载荷步
OUTRES,ALL,ALL,
TIME,1
AUTOTS,1
NSUBST,10,100 ,10 ,1
KBC,0
SOLVE
CMSEL,S,_KPCM
CMDEL,_KPCM
CMSEL,S,_LINECM
CMDEL,_LINECM
CMSEL,S,_AREACM
CMDEL,_AREACM
CMSEL,S,_VOLUCM
CMDEL,_VOLUCM
/GRES,cwz,gsav
CMDEL,_TARGET
/PNUM,TYPE,1
/NUM,1
EPLOT
ESEL,ALL
ESEL,S,TYPE,,2
ESEL,A,TYPE,,3
ESEL,R,REAL,,3
CMSEL,A,_NODECM
CMDEL,_NODECM
CMSEL,A,_ELEMCM
CMDEL,_ELEMCM
LSEL,S,,,3
CM,_CONTACT,LINE
TYPE,3
NSLL,S,1
ESLN,S,0
ESURF
ALLSEL
ESEL,ALL
ESEL,S,TYPE,,2
ESEL,A,TYPE,,3
ESEL,R,REAL,,3
/PSYMB,ESYS,1
CMDEL,_CONTACT
/MREP,EPLOT
/SOL
ANTYPE,0
NLGEOM,1
!定义边界条件
DL,1, ,ALL,
DL,2, ,SYMM
DL,6, ,SYMM
DL,7, ,SYMM
!施加载荷
N1=NODE(0,0.14,0)
F,N1,FY,-10000
MP,MU,1,0.1
MAT,1
MP,EMIS,1,7.88860905221e-031
ቤተ መጻሕፍቲ ባይዱR,3
REAL,3
ET,2,169
ET,3,172
R,3,,,1.0,0.1,0,
RMORE,,,1.0E20,0.0,1.0,
RMORE,0.0,0,1.0,,1.0,0.5
MPDATA,PRXY,1,,0.3
MPTEMP,,,,,,,,
MPTEMP,1,0
MPDATA,EX,2,,2.2e8
MPDATA,PRXY,2,,0.31
!建立模型
RECTNG,-0.2,0,-0.06,0,
CYL4,0,0.07,0,90,0.07,270
RMORE,0,1.0,1.0,0.0,,1.0
KEYOPT,3,3,0
KEYOPT,3,4,0
KEYOPT,3,5,0
KEYOPT,3,7,0
KEYOPT,3,8,0
KEYOPT,3,9,0
KEYOPT,3,10,2
KEYOPT,3,11,0
KEYOPT,3,12,0
!划分网格
LESIZE,3, , ,80,200, , , ,1
LESIZE,2, , ,45,0.005, , , ,1
LESIZE,5, , ,100,0.005, , , ,1
LESIZE,6, , ,80,200, , , ,1
ESIZE,0.005
TYPE,1
MAT,2
AMESH,1
MAT,1
AMESH,2
!创建接触对
!*
CM,_NODECM,NODE
CM,_ELEMCM,ELEM
CM,_KPCM,KP
CM,_LINECM,LINE
CM,_AREACM,AREA
CM,_VOLUCM,VOLU
/GSAV,cwz,gsav,,temp