2015亚太大学生机器人大赛ROBCON简易方案
机器人竞赛活动方案

机器人竞赛活动方案引言机器人竞赛是一项开展机器人设计与性能比拼的活动,它旨在通过模拟真实情境,检验参赛队伍所设计机器人的各项能力。
本方案将详细介绍机器人竞赛的准备工作、比赛过程和评分标准等内容。
活动准备1. 确定竞赛类型和规则机器人竞赛可以包括多种类型,如迷宫赛、足球赛、救援赛等。
在准备工作中,需要确定竞赛类型,并深入了解该类型的规则和要求。
这样能确保参赛队伍在设计机器人时能满足相关要求,并有效提高比赛成绩。
2. 组织参赛队伍机器人竞赛通常是团队活动,需要组织参赛队伍。
参赛队伍可以由学生、工程师或机器人爱好者组成。
组织队伍时要根据竞赛类型和规则,确定队伍成员的技能要求和分工。
3. 学习机器人设计与编程在参加机器人竞赛之前,参赛队伍需要学习机器人设计与编程知识。
这些知识包括机械结构设计、电子电路原理、传感器使用和编程语言等。
通过学习这些知识,参赛队伍可以设计出具有良好性能的机器人,并编写程序实现各项功能。
4. 制定竞赛计划参赛队伍需要根据竞赛日期和时间,以及参赛队员的时间安排制定竞赛计划。
竞赛计划应包括机器人设计与制作时间、编程调试时间、练习赛时间等。
合理的竞赛计划有助于提高队伍的竞赛准备效率。
比赛过程1. 技术检录在比赛开始前,参赛队伍需要将他们的机器人带到技术检录区进行技术检验。
技术检录的目的是检查机器人的合规性和安全性。
只有通过技术检录的机器人才能参加正式比赛。
2. 赛前准备比赛开始前,参赛队伍需要在比赛场地进行赛前准备工作。
这包括检查机器人的各个部件是否正常工作、设置传感器参数、加载程序等。
赛前准备工作能够确保机器人在比赛中运行稳定,并发挥最佳性能。
3. 比赛环节比赛通常包括多个环节,每个环节有不同的任务要求。
参赛队伍需要根据规则和要求,操控机器人在指定时间内完成任务。
比赛过程中,机器人的速度、稳定性、准确性等都将影响最终的成绩。
4. 评分与排名比赛结束后,评委将根据规定的评分标准对参赛队伍的表现进行评分。
2015亚太大学生机器人大赛简易方案
2015亚太大学生机器人大赛简易方案参考比赛规则以及具体参数,本人做出如下参考方案。
方案可分为几个部分:一.发球阶段二.运动(检测)阶段三.击球阶段由通信规则给出的参考,个人建议采用无线进行微调,机器人做成半自动,而且无线通信采用蓝牙,个人认为蓝牙相比超声波、红外线等其他可见光而言,受到的自然因素干扰会更少一点。
一.发球阶段:因为两台机器人可总共携带6颗球,建议每个机器人携带三个球(这个个人没有具体安排),发球的力量可以来源于气缸,可在场下多测试几次从而装上合适大小的供发球使用的气缸。
一个爪子对应一个球拍,爪子在球拍上方,当羽毛球从爪子上落下时,可通过红外传感器检测羽毛球下落的时间以及距离球拍的距离,从而可以让球拍把羽毛球击打出去,当然也可以设定算法,由传感器检测出羽毛球下落的速度以及位置,从而使机器人调整合适的姿态,把球击出,当然击出的时候机器人要有一个初始姿态,从而能让球打到指定位置。
二.运动(检测)阶段此阶段较为复杂,亦可分为若干小阶段:1.检测对方的球的落点。
2.场上机器人的运动。
3.两个机器人之间的通信。
1.检测对方的球的落点:设定机器人的一个面为参考面,即前面,且前面始终面对网。
在机器人的前上方180度设置传感器,我认为超声波比较好,因为蝙蝠就是通过超声波定位,由于不同的物体大小可能不一样,反射的超声波的强度也不一样,由此即可确定球在空中的位置,通过不断的发射超声波,通过算法即可确定羽毛球在空中的运动弧线。
2.场上机器人的运动:两个机器人均可采用全场定位,而且使用麦格纳姆轮,当检测到羽毛球的运动轨迹的时候,机器人便快速调整姿态,以迎接对方的球。
3.两个机器人之间的通信:两个机器人同时在场上运动,需要互相沟通,相互配合,于是他们之间需要不断的互传各自的数据,位置参数,羽毛球距离自己的远近,由于是全场定位,两个机器人的坐标可以轻松得出。
哪个机器人距离羽毛球近就由那个机器人回球,但是要设定两个机器人的距离不能小于两者其中之一展开后相互刚好挨着时的距离(及既不影响打球又不会让两个机器人相撞),两者之间的通信也可采用蓝牙通信。
Robotac2015 全国大学生机器人大赛规则

RoboTac 2015全国大学生机器人大赛比赛规则共青团中央学校部²全国学联秘书处2014年10月图1 比赛场地三维图1 规则要点1.1 RoboTac是红、蓝两方机器人在规定场地上的攻、防对抗比赛。
比赛过程中,双方的多台机器人要越过障碍、相互攻击、进攻对方堡垒,得分多的一方获胜。
1.2 每场比赛由红、蓝两队同场竞技,比赛时间为4分钟。
1.3 每支参赛队可以有多台机器人,各队可根据比赛策略,设计、制作具有不同功能的机器人。
1.4 双方机器人以攻击对方堡垒为主要目的。
双方机器人可以相互攻击,机器人上带有组委会统一提供的活力柱,每个活力柱有三档,当机器人受到一次攻击时,活力降一档,降满三档后,则机器人“阵亡”,自动断电。
1.5 在规定的比赛时间内,双方机器人攻击对方堡垒次数多的一方获胜。
若出现平局,则双方各选一台仍具有活力的机器人,加时2分钟,先对对方堡垒实现一次有效攻击的一方取胜。
如2分钟后双方均未实现有效攻击,则在此时距离对方堡垒最近的一方获胜。
2 比赛场地2.1场地尺寸及地面比赛场地为12000mm³12000mm的正方形区域,周围用高120mm、宽80mm的PVC槽作为围栏。
场地详细尺寸见《场地及道具设计图册》中图1,场地三维图见图2,PVC槽详细尺寸见图3。
赛场地面用600mm³600mm³12mm的爬行垫铺设,颜色见图1,爬行垫具体尺寸见图4。
场地主要由高地和防区组成。
2.2高地场地对角各有一个高地,为2400mm³2400mm方形区域,高135mm,表层用600mm³600mm³12mm 的绿色爬行垫铺设。
高地是红、蓝队自动机器人守护的区域。
两队的高地中各有一块600mm³600mm 的自动机器人启动区。
其中一方的高地与场地表面通过2块500mm长、320mm宽的橡胶斜坡(13kg±0.4kg)和2块500mm³300mm³135mm的桥墩连接,尺寸见图5。
2015年机器人大赛竞赛规则 10月修改版
2015年机器人大赛竞赛规则(详版)2015年10月修订天津大学学生科技协会天津大学机械工程学院学生科技协会天津大学第十一届机器人节竞赛命题组一、场地1.场地内所有引导线和标志线采用无反光15mm智能车赛道胶布。
2.所有场地材质为1.5cm厚的密度板。
3.场地四周外侧围墙高度200mm,迷宫区围墙高度200mm,墙壁与地面垂直,所用材质与地面相同。
4.场地尺寸见附件附件:2015机器人大赛场地尺寸图。
以下尺寸仅对于单侧赛道进行说明。
5.启动区300mm*300mm,启动区标志线位于启动区出口,播放高频开赛音检测抢跑。
拱桥区标志线位于斜面入口和出口,其余标志线位于关卡入口前方50mm处。
6.火炬拿取区有四个火炬放置台,间距47mm。
火炬为尺寸不同的两个圆锥体的组合体,下侧圆锥底面直径72.2mm,高105mm,上侧圆锥底面直径72.2mm,高40mm。
7.障碍物为不规则物体,随机放置于循线区任意位置。
可用任何方式通过障碍物。
8.循线区为自由平滑连续曲线以及直线。
入口处切线与启动区标志线垂直。
其余位置引导线为直线,连接转弯位置为半径200.mm的1/4圆弧以及直角弯。
9.拱桥高度100mm,斜面水平投影长宽均为300mm,倾角18.4°,桥面长宽均为300mm,斜面及桥上无引导线。
要求机器人整体从桥身通过才算完成关卡。
10.迷宫区宽度600mm,入口宽度300mm,出口宽300mm,出入口均靠迷宫区右侧。
11.迷宫区挡板高度200mm,挡板宽度250mm,挡板间距110mm,挡板数量7块。
挡板交叉放置,位置确定。
12.终点平台长宽均为1000mm,高100mm。
平台斜坡入口宽300mm,水平投影长300mm,斜坡角度18.4°。
13.终点平台上放有圆柱形火炬放置台,直径80mm,高80mm。
注:取消扫码环节,改为机器人听到开赛音后,直接出发,拿取任一火炬完成后面关卡即可。
二、机器人1.参赛机器人机必须是全自主机器人,自行决定其行动,不得通过线缆与任何其他器材(包括电源)连接。
2015RoboCup中国公开赛仿真3D组比赛规则
2015RoboCup中国公开赛仿真3D组比赛规则2015RoboCup中国公开赛仿真3D组的比赛规则。
比赛规则制定的宗旨是保证比赛的公平性和流畅性。
技术委员会有权在任意时刻合理的修改比赛规则,并会及时通知各参赛队伍。
各参赛队伍如果对比赛规则有意见或者建议可以向技术委员会反馈,技术委员会保留最终决定权。
本规则根据2014 中国机器人大赛3D 仿真组比赛规则及日RoboCup2015世界杯比赛规则修订。
1.比赛赛程安排所有参赛球队都需要在赛前进行注册,请将以下信息发送至技术委员会负责人邮箱(fangbf@)●球队名称;●学校名称;●队伍成员(请注明指导老师和领队);●联系邮箱;●球队描述文档(不少于4页);●球队可执行码;请确保球队可执行码可以在比赛规则要求的环境中正常运行(详见比赛规则机器配置与软件环境)。
如果注册通过,技术委员会会尽快回复一封确认邮件。
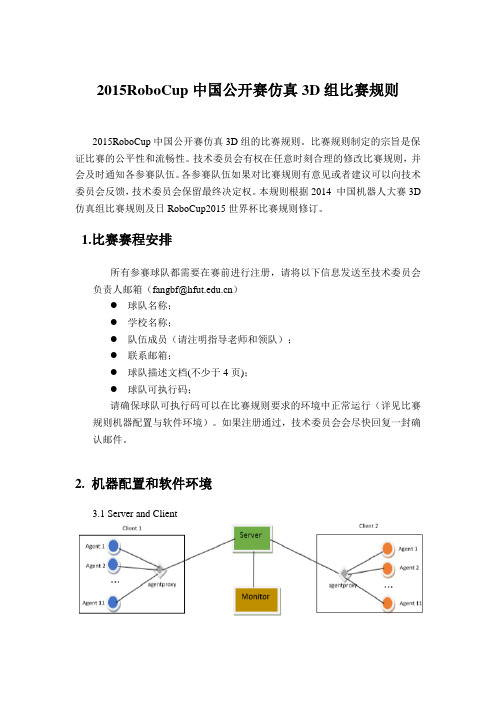
2. 机器配置和软件环境3.1 Server and Client3.2 Software操作系统:Ubuntu 14.04(64bit)仿真环境:Simspark 0.2.4, Rcssserver3D 0.6.103. 最新修订规则根据2015 RoboCup世界杯3D仿真组组织委员会对于server的修改,特增加如下规则:(1)在比赛过程中,比赛双方球员必须都有过触球动作,或开球方有至少一位非开球球员在中圈外有过触球动作,否则进球无效。
(2)在点球模式时,当右方球员(即防守方守门员)擅自离开防守区域时,左方球员(即主罚点球球员)得分。
4. 获胜规则4.1 循环赛阶段循环赛阶段,小组内每两支队伍之间都要进行一场比赛。
分组情况将通过抽签决定。
小组内排名按照以下顺序评定:●积分:获胜积3 分,平局积1 分,输球积0 分。
●相互比赛的胜负关系。
●净胜球数。
●进球数。
●加时赛(上下半场各3 分钟)。
●点球。
●抛硬币。
4.2 淘汰赛阶段淘汰赛阶段,排名按照以下顺序评定:●进球数。
ROBOCON比赛机器人毕业设计要点
中文摘要本课题的目的是针对2008亚太机器人大赛的主题和规则设计制作一台手动机器人。
本文首先分析了本届比赛的特点,阐述了比赛的总体方案,提出了手动机器人的任务目标和主要技术参数。
在此基础上,设计了三套整体结构方案,并通过三维实体建模和样机实验等方式分析了各方案的优缺点,完成了对整体结构方案的优化与改进,确定了手动机器人的机构组成。
之后,对机器人的各组成机构进行了详细设计,完成了走行方式、提升机构形式和夹持机构形式的设计与改进,进行了电机选型计算和关键零件的校核,绘制了机器人的零件图和装配图,解决了在机器人的组装和调试过程中发现的一些问题。
设计并制作完成的手动机器人结构简洁,动作迅速,操控灵活,性能稳定,得分效率高,完全满足设计要求。
关键词:亚太机器人大赛,手动机器人,方案设计,机构设计AbstractThe purpose of this subject is to design a manual robot for the Asian-Pacific Robot Contest 2008.After analyzing the characteristics of this contest, the paper firstly elaborates the general strategy, and then proposes the tasks and main requirements for the manual robot. Based on that, three structural schemes of the robot are designed, and then optimizations and improvements are accomplished through analyzing of the 3D models and robot prototypes. So the mechanisms which composed the manual robot are determined. After that, details of the mechanisms are designed; improvements are made for the moving style, the elevating and clamping mechanisms which are selected. Motors are selected according to computation, key parts are checked, and drawing of parts and assemblage are given. Some problems are solved through debugging.The manual robot’s structure is very simple, and it moves fast, scores efficiently. Further more, it is very convenient to control the robot. In a word, it satisfies the requirements of design.Key words: Asian-Pacific Robot Contest, Manual robot, Scheme design, Mechanical design目录中文摘要 (I)Abstract ............................................................................................................................... I I 第1章绪论 (1)1.1机器人及机器人竞赛 (1)1.2 ABU-Robocon概述 (2)1.3ABU-Robocon2008主题与规则摘要 (3)1.4 章节概述 (6)第2章规则分析以及参赛总体方案 (8)2.1 规则分析 (8)2.2 参赛总体方案的确定 (11)2.3 手动机器人的功能要求和主要技术参数 (13)第3章整体结构方案设计与改进 (15)3.1 方案一 (17)3.1.1设计思路 (17)3.1.2 动作顺序 (19)3.1.3分析与总结 (20)3.2 方案二 (21)3.2.1设计思路 (21)3.2.2 动作顺序 (23)3.2.3分析与总结 (23)3.3 方案三 (24)3.3.1设计思路与总体结构 (24)3.3.2优化与改进 (25)第4章机械系统设计 (32)4.1 走行系统设计 (32)4.1.1走行方式选择 (32)4.1.2走行电机选择 (34)4.1.3 走行系统结构形式及外形尺寸 (40)4.2 提升机构设计 (41)4.2.1 优化与改进 (42)4.2.2 相关计算与校核 (48)4.3 夹持机构设计 (52)第5章操作手柄设计 (54)5.1 操作方式和按键布局设计 (54)5.2 摇杆模拟量的采集、编码与发送 (55)总结 (58)致谢 (60)参考文献 (61)附录一:中文翻译 (64)附录二:外文原文 (83)第1章绪论1.1机器人及机器人竞赛机器人学是一门迅速发展的综合性科学,其中包含着许多具有战略性、前沿性和前瞻性的高技术,自第一台电子编程工业机器人问世以来,机器人学的研究已取得令人瞩目的成就,在工业、农业、商业、旅游业、空间、海洋以及国防等领域获得了越来越普遍的应用。
机器人比赛策划书

机器人大赛活动策划一. 活动背景随着社会的发展,机器人的发展可谓是日新月异,如今不论是在生活还是生产上,它的应用都越来越广泛。
我国的机器人事业虽然起步晚,但如今也有了一定的发展,现在的大学生接过了这把火炬,就一定会让它传得更远。
我校的许多学生对机器人都有很高的热情,希望通过一定途径能有机会设计并制作机器人,并且相当一部分人都有一定的技术基础,而机器人大赛正是给他们提供了一个平台,供他们去学习、去展现。
二. 活动目的以此来提高同学们在机械等方面的相关知识,增强同学们的动手能力,让大家在实际的设计和制作中体验实际动手操作的重要性,并以此激发同学们的创新精神,巩固并进一步加深同学们对理论知识的理解,也为我校培养机器人工业后备人才打下坚实的兴趣和知识基础。
三.活动对象全校本科生四.活动时间*年*月五.活动地点六.活动内容本次比赛分为三组,初级组、中级组(遥控组)、自动组。
三组的比赛规则和难易也各不相同(具体规则见附表),参赛队可根据自身水平选择进入何组,然后在规定时间内,按照所进组的要求自行制作出相应的机器人(品种不限),最后再进行比赛。
七.活动安排1.*年*月*号至*月*号协会内部进行各项准备,包括海报、展板、横幅、宣传单等内容和版式的设计,宣传场地的租借,活动详细流程的规划,比赛规则以及评分标准的完善。
2.*年*月*号至*月*日宣传通过海报、展板、横幅、宣传单以及校广播进行宣传并在网上发布比赛规则,比赛流程,评分标准。
同时开通网上电子邮件报名方式。
具体如下:1、在学校各处张贴海报,公告板、桥上、路上、宿舍楼等为防止海报被撕,用喷雪在公告板上喷涂。
2、主要在一食堂和四食堂放大展板,并在中午和下午进行现场报名,连续三天,并且配专人进行讲解。
3、在各个食堂门口发放传单4、在学校网站上进行公告5、校广播在中午和晚上进行播报3.*年*月*日选择时间邀请老师和上届比赛嘉宾进行专业培训1、由本协会技术部部长对机器人的具体设计制作进行详细的讲解2、由上一届参赛者对制作上进行简单说明3、老师对其进行补充讲解4、提问解答4. *年*月*号至*年*月*日制作在*****设计制作自己的机器人,不断地调试、改进,以待在比赛中发挥得更好。
第十五届全国大学生机器人ROBOCON比赛规则(2015.11修订版)

第十五届全国大学生机器人大赛ROBOCON主题与规则清洁能源共青团中央全国学联中央电视台新科动漫频道2015年10月清洁能源0 主题与简介我们在日常生活中处处要用到能量,它们均源于自然。
人类从自然界提取或合成了这些能量。
在所有能量中,化石能源是最便宜且易于使用的。
过去,我们误认为化石能源储量无限而过度消耗了它们。
这种能源消耗习惯现在对我们影响很大。
化石能源难以勘探,现有的化石能源不会维持太久。
为了解决这个问题,我们必须有效地利用现有能源,并同时探索和利用其它清洁和可再生能源,以弥补来自化石的能量。
第十五届全国大学生机器人大赛ROBOCON以“清洁能源”为主题,比赛在图1所示的场地上进行。
图1 比赛场地比赛规则的设计体现了尽可能减少能源消耗和利用清洁、可再生能源的意识。
每支参赛队要制作两台机器人:一台是表现半自主和/或自主控制技术的混合型机器人,另一台是象征节约能源的经济型机器人。
为了方便,以下把它们分别简称为机器人A和机器人B。
机器人B只能从机器人A那里接受能量完成行驶动作,但可以用用自己的能量完成转向动作,以跟踪包含斜坡和山岗、河流和山道上的路径(详见4.2.2)。
机器人A除了向机器人B提供行驶能量外,还需要从机器人B 那里取得风力发电机的螺旋桨,并爬上风机立柱以装配风力发电机。
我们期待着在赛场上见证由年轻的未来工程师们制作的机器人的精彩比赛!1 比赛流程及任务参赛队到达比赛场地后,应按以下顺序完成各项任务。
1.1 机器人的设置1.1.1 比赛开始前,有1分钟的机器人设置时间。
1.1.2 每支参赛队最多有三名队员进行机器人的设置,协助队员不得参与设置。
1.1.3 在一分钟内没有完成设置的参赛队在比赛开始后可以继续进行设置。
1.2 比赛开始时机器人和参赛队员的位置1.2.1 机器人A必须从启动区A1启动。
1.2.2 机器人B必须放在启动区B内,它与地面的所有接触点(面)不得超出启动区B且它的任何部件不得伸到对方场地、场外及其上方。
2015 robocon 国际赛 比赛规则
2015ROBOCOOOOOOOONHITROBOCON哈工大竞技机器人队ABU ROBOCON 2015本届比赛的主题是羽毛球双打比赛。
比赛的亮点在于双方的两个机器人来回进行羽毛球击打。
连续对打时间越长比赛将越精彩。
机器人独特的击打方式则会很有趣。
尤其是机器人进行跃杀时观众会更激动。
我们很期望在印尼日惹看到未来的工程师们制作的精彩的双打机器人们。
2.1遵纪守法。
遵守大学生安全守则。
2.2别受伤。
2.3比赛期间队员戴头盔和保护性眼睛以及鞋子。
2.4使用激光时应低于2级激光(译者注:游戏用激光枪、激光棒及条码扫描器等都属于2级激光)。
2.5注意保护。
2.6机器人注意要有人随时监视。
2.7为防止过电或电流不足导致重启。
请注意:2.8 保证足够的电池和保险丝,远离易燃品。
别用山寨电池。
电池备够。
2.9 每个机器人都需要根据实际进行实际的安全防护。
2.10 请一定务必注意安全。
3.1 每个队伍包括四个成员,一个指挥员和四个后勤维护人员。
所有人来自相同的大学,综合学校或者学院。
3.2 团队成员必须为本科生。
研究生不能参加。
3.3 所有参赛机器人必须由团队成员设计和制造。
3.4 只有三个团队成员(即维修人员)允许参与最终比赛。
3.5 最多3名维修人员可以在调整区域调整机器人以及搬运机器人到比赛场地。
4.1 第一个发球的队伍是由抽签决定的。
4.2 每支队伍必须预先装好6个由裁判员提供的六个羽毛球。
各队自己决定给两个机器人分配多少羽毛球。
4.3 置位时间4.3.1 随着裁判员的指示,各队有一分钟的置位时间。
4.3.2 驱动系统在置位时间内必须保持关闭。
4.3.3 这时各队可以将他们的机器人放在他们那边场地的任何位置。
4.3.4 在置位时间中最多三名队员和三名维修手共计6个人允许准备比赛。
4.3.5 6个羽毛球必须在置位时间过程中装在机器人里。
4.4 发球4.4.1 发球由各队轮流执行。
4.4.2 发球必须在裁判吹哨后五秒内执行。
RoboMasters 2015全国机器人大赛规则
RoboMasters 2015 全国大学生机器人大赛比赛规则共青团中央学校部全国学联秘书处深圳市大疆创新科技有限公司承办2014年更新日志RoboMasters概要RoboMasters是一项全新的机器人超级对抗赛。
参赛队伍通过自行设计制造多种机器人进行射击对抗,完成指定任务,由比赛裁判系统判定比赛胜负。
参赛机器人包括可以发射“弹丸”的手动机器人以及能够完成一定任务的自动机器人。
参赛队员需要遥控手动机器人在复杂的场地中移动并发射“弹丸”,攻击对方机器人和基地以取得胜利。
自动机器人将在比赛中自动完成指定任务。
比赛采用红、蓝双方对抗的形式,每场限时5分钟。
比赛规则1比赛裁判系统比赛裁判系统将自动判断比赛胜负并确保比赛公平性,由以下三部分组成:1)车载监控装置;2)计算机客户端和服务器;3)高清图传模块。
参赛队设计制作的机器人必须安装由比赛组委会提供的车载监控装置和高清图传模块。
其中车载监控装置包括以下几个部分:1)检测击打力度的“薄弱点”;2)机器人的电源管理器;3)显示活力值的灯柱;4)无线数据传输模块。
活力值——表示机器人活动能力的数值,并借助车载监控装置的灯柱实时显示出来。
一旦某机器人的活力值降至零,车载监控装置便立即下达指令,通过机器人上的电源管理模块切断动力电源,使其“失活”。
薄弱点——机器人内部配装了传感器的特定部位,可以感受和检测被“弹丸”击中的力度,并使机器人的活力值下降。
双方参赛的机器人根据需要安装有车载监控装置、高清图传模块和摄像头。
摄像头的作用是实时捕捉现场的图像,通过高清图传模块将它们分别回传到位于“作战室”中的操作员的显示屏上。
通过观察回传的实时画面,操作员远程操控手动机器人。
无线数传模块将车载监控装置中记录的活力值等数据传输到对应的计算机终端上,再通过以太网传输到服务器端,服务器会记录红蓝双方的各项数据,确定比赛胜负。
图1-1为红、蓝双方的比赛示意图。
图1-1 比赛示意图2参赛队每支参赛队应由同一所学校的至少5名学生和至少1名指导教师组成。
2015ROBOCON规则——羽毛球
2015robocon规则—羽毛球本规则翻译仅供参考,有许多翻译不到位之处,还望读者见谅。
1.主题和规则这一大赛主题是羽毛球的双打比赛。
这场比赛的亮点是两个机器人怎样通过彼此的合作命中和击羽毛球。
游戏反弹持续的时间越长就变得越令人兴奋。
以独特的方式击中羽毛球的机器人就会变得更娱乐。
如果机器人做了令人大开眼界的跳跃扣杀,会使观众很入神。
在印度尼西亚日惹,我们期待见证这场由崭露头角的年轻工程师建造的激动人心的独特机器人的比赛。
2.关于安全2.1.请参与的大学或国家遵守所规定的安全准则。
2.2.参与者必须充分注意设计和建造的机器人的安全,以便他们在场地上不伤害任何人(其他球队,组委会,观众)。
2.3团队成员在比赛中必须戴安全帽和护目镜和鞋。
2.4.当使用激光时,它必须小于比2类激光。
2.5.机器人不仅在建设时期,还是在所有测试运行和实践的阶段,请采取有效的安全措施,如戴上手套和衣服,保障四肢,不要很容易被机器人抓住。
2.6.请在机器人上附上紧急按钮。
2.7.不要单独练习/测试机器人,这样成员可以立即对事故作出回应。
2.8.为了避免因设计错误或重建的重大事故,机器人或一个电路或短路电池的过电流导致发生火警,请进行以下;2.8.1.使用接线与足够的气量和保险丝。
2.8.2.除易燃物品的工作。
2.8.3.不要擅自改建的电池。
2.8.4.使用指定的电池制造商的充足电池。
2.9除了上述情况,每个机器人的独特功能可能会引发各种危险事件。
请根据个人机器人的特点采取有效的安全措施。
2.10.请采取安全措施,因此,一个单一故障或失误操作不会导致严重的事故。
3.团队成员3.1.每个小组的成员包括四名成员组成,其中三个学生,一个指导老师,和维护人员,全部来自同一所大学,理工或大学。
3.2.团队成员和维护人员必须在他们的大学注册过,录取国际比赛的时候,硕士研究生学生没有资格参加比赛。
3.3.机器人必须由参加这次比赛的所有设计。
机器人比赛的策划书

机器人比赛的筹划书11幢2091、宣传部马上制作并张贴关于此次活动简介的海报、宣传单及横幅。
2、秘书长鼓励社员和有兴趣的同学积极参加此次活动。
3、组织部部门查阅资料,与指导老师交流,准备此次活动的技术指导并熟悉整个活动的流程,负责活动地点和人员安排。
4、财务部印刷证书。
5、秘书长、宣传部做好各环节活动的总结工作。
6、社长联系评委。
7、社长、财务部规划整个活动,协调好各部门的工作。
1、前期工作准备好后,组织部将印刷好的宣传单发于各个学院,每个学院10份。
2、要求参赛者设计他们自己的机器人(可以组队设计和制作)。
参赛要求:1、要求设计人形机器人的外观(机器人的功能不用考虑)2、要有创意,要新颖。
3、参赛者将参赛作品在11月21号晚6:30于11-209参赛。
三、活动安排1、组织部在活动场合管理纪律2、所有参加此次活动的社团干部提前半小时到场,熟悉活动流程。
3、所有社团干部清扫现场四、后期总结1、此次活动设立一等奖一名,二等奖两名,三等奖三名,创意奖一名,并颁发证书。
2、宣传部制作海报公布本次活动的结果3、秘书长做一份本次活动的调研工作,评定本次活动成功与否经费预算海报:2元宣传单:5元奖品:(由赞助商提供)横幅:50元证书:30元总计:87元效果预测通过本次活动,不仅锻炼了社员的动手操作能力,对机器人的理解程度也加深了,而且加强社员之间的合作能力,同时也表达机器人社团组织活动能力的加强,从新树立机器人社团的形象。
机器人评分评委有社团干部和指导老师组成。
第十五届全国大学生机器人ROBOCON比赛规则(2015.11修订版)
第十五届全国大学生机器人大赛ROBOCON主题与规则清洁能源共青团中央全国学联中央电视台新科动漫频道2015年10月清洁能源0 主题与简介我们在日常生活中处处要用到能量,它们均源于自然。
人类从自然界提取或合成了这些能量。
在所有能量中,化石能源是最便宜且易于使用的。
过去,我们误认为化石能源储量无限而过度消耗了它们。
这种能源消耗习惯现在对我们影响很大。
化石能源难以勘探,现有的化石能源不会维持太久。
为了解决这个问题,我们必须有效地利用现有能源,并同时探索和利用其它清洁和可再生能源,以弥补来自化石的能量。
第十五届全国大学生机器人大赛ROBOCON以“清洁能源”为主题,比赛在图1所示的场地上进行。
图1 比赛场地比赛规则的设计体现了尽可能减少能源消耗和利用清洁、可再生能源的意识。
每支参赛队要制作两台机器人:一台是表现半自主和/或自主控制技术的混合型机器人,另一台是象征节约能源的经济型机器人。
为了方便,以下把它们分别简称为机器人A和机器人B。
机器人B只能从机器人A那里接受能量完成行驶动作,但可以用用自己的能量完成转向动作,以跟踪包含斜坡和山岗、河流和山道上的路径(详见4.2.2)。
机器人A除了向机器人B提供行驶能量外,还需要从机器人B 那里取得风力发电机的螺旋桨,并爬上风机立柱以装配风力发电机。
我们期待着在赛场上见证由年轻的未来工程师们制作的机器人的精彩比赛!1 比赛流程及任务参赛队到达比赛场地后,应按以下顺序完成各项任务。
1.1 机器人的设置1.1.1 比赛开始前,有1分钟的机器人设置时间。
1.1.2 每支参赛队最多有三名队员进行机器人的设置,协助队员不得参与设置。
1.1.3 在一分钟内没有完成设置的参赛队在比赛开始后可以继续进行设置。
1.2 比赛开始时机器人和参赛队员的位置1.2.1 机器人A必须从启动区A1启动。
1.2.2 机器人B必须放在启动区B内,它与地面的所有接触点(面)不得超出启动区B且它的任何部件不得伸到对方场地、场外及其上方。
2015全国机器人大赛主题与规则

# 主题与规则### ABU ROBOCON 2015### 印度尼西亚-日惹“机器人比赛主题:机器人羽毛球赛”#### 1. 主题和规则本次比赛的主题是羽毛球双打。
比赛的亮点在于两台机器人通过协作实现击球和接球。
回合数越多,比赛就越精彩。
机器人的独特击球方式是十分有趣的。
如果机器人做出了跳跃扣杀的动作,那观众将会叹为观止。
我们在日惹期待着见证由年轻的准工程师们带来的精彩比赛。
#### 2. 安全相关2.1 请遵守由参赛者所在学校或国家所指定的安全准则。
2.2 参赛者在设计和搭建机器人时,必须充分注意安全问题,以免在赛场上给任何人(其他队伍、组委会、观众,等)造成伤害。
2.3 在比赛过程中,成员必须戴头盔、护目镜,穿鞋。
2.4 如果使用到激光,必须是在二级以下。
2.5 在搭建、调试机器人的过程中,必须采取有效的安全措施。
例如,佩戴护目镜、穿着不易于被机器人勾住的衣物来保护四肢。
2.6 请在机器人上加装急停按钮。
2.7 任何情况下都不要独自一人调试机器人,以免无人及时地处理意外。
2.8 为了避免出现重大事故、重新搭建机器人(译者注:如,对机器人造成难以修复的损坏)、电池短路或过流导致着火,请遵守以下条款:2.8.1 使用保险丝盒载流量足够的导线。
2.8.2 不使用易燃物。
2.8.3 不要改造电池。
2.8.4 使用标称参数合格且足够应对使用场景的电池。
2.9 此外,根据每台机器人的特性,可能存在着不同的风险。
请根据机器人的特性采取有效的安全措施。
2.10 请采取必要的安全措施,避免误操作和单独的故障造成严重事故。
#### 3. 队伍成员3.1 每支队伍允许有一个技术团队和四位正式成员————三名学生和一名领队。
所有成员必须来自同一个学校。
3.2 正式成员和技术团队必须在他们所在的学校注册。
毕业生禁止参赛。
3.3 所有参赛的机器人必须是由正式成员和技术团队设计和搭建的。
3.4 只允许正式成员中的三名学生直接参加比赛。
2015 ROBOCON 规则
2015 ROBOCON第十四届全国大学生机器人大赛主题与规则羽球双雄羽球双雄1 主题与规则本届比赛的主题是羽毛球双打。
比赛的精彩在于两台机器人相互协作击球和接球。
往复持续得越长,比赛就越好看。
击球方式独特的机器人是十分有趣的。
如果机器人跳起扣杀,就太吸引观众了。
我们期待着在赛场上见证由年轻的未来工程师们制作的机器人的精彩比赛!2 关于安全2.1 请遵守我国和参赛者所在学校所制定的安全准则。
2.2 参赛者在设计和制作机器人时应特别注意安全,以免它们对场馆中的任何人(其他参赛队、工作人员、志愿者、观众等)造成伤害。
2.3 比赛时,队员务必戴头盔、护目镜,穿袜。
2.4 如果使用激光器,必须是二级或以下。
2.5 在制作机器人、试运行和练习阶段,请采取有效的安全措施(例如,戴护目镜,穿着不易被机器人夹住的服装保护肢体等)。
2.6 请在机器人上加装急停按钮。
2.7 绝不要独自一人练习/测试机器人,其他队员可以立即对意外做出反应。
2.8 为了避免由于机器人的设计错误、反复拆装、电路过流、电池短路所可能引发的重大事故,请注意以下事项:2.8.1 采用具有足够容量的导线和保险丝。
2.8.2 远离易燃物。
2.8.3 不要改造电池。
2.8.4 使用电池生产厂家规定的合格充电器。
2.9 此外,每台机器人都可能由于各自的特点而引发相应的危险事件,请根据不同机器人的特性采取有效的安全措施。
2.10 请采取安全措施,避免单个故障或误操作造成重大事故。
3 参赛队员3.1 每支参赛队由3名学生和1名指导教师作为参赛队员,另可配备若干协助队员。
他们必须来自同一所大学或学院。
3.2 学生参赛队员和协助队员必须2015年6月前仍在其大学或学院注册就读。
研究生不允许参赛。
3.3 参赛的所有机器人必须由参赛队员和协助队员设计和制作。
3.4 只允许3名学生队员上场参加比赛。
3.5 允许最多3名协助队员在准备区内调试机器人和把机器人搬到比赛场地。
第十五届全国大学生机器人大赛ROBOCON比赛规则

第十五届全国大学生机器人大赛ROBOCON主题与规则清洁能源共青团中央学校部·全国学联秘书处中央电视台新科动漫频道2015年9月清洁能源0 主题与简介我们在日常生活中处处要用到能量。
所有能量均源于自然。
人类从自然界提取或合成了这些能量。
在所有能量中,化石能源是最便宜且易于使用的。
过去,我们误认为化石能源储量无限而过度消耗了它们。
我们过去的能源消耗习惯现在对我们影响很大。
化石能源难以勘探。
现有的化石能源不会维持太久。
为了解决这个问题,我们必须有效地利用现有能源,并同时探索和利用其它可持续能源,它们应该是清洁和可再生能源,以弥补来自化石的能量。
第十五届全国大学生机器人大赛ROBOCON以“清洁能源”为主题,比赛在图1所示的场地上进行。
图1 比赛场地比赛规则的设计体现了尽可能减少能源消耗和利用清洁、可再生能源的意识。
每支参赛队要制作两台机器人:一台是表现半自主和/或自主控制技术的混合型机器人,另一台是象征节约能源的经济型机器人。
为了方便,以下把它们分别简称为机器人A和机器人B。
机器人B中没有用于行驶的作动器。
它从机器人A那里接受行驶能量,只能使用一个转向作动器控制它的方向,以跟踪包含斜坡和山岗、河流和山道上的路径。
机器人A除了向机器人B提供行驶能量外,还需要从机器人B那里取得风力发电机的螺旋桨,并爬上风机立柱以装配风力发电机。
我们期待着在赛场上见证由年轻的未来工程师们制作的机器人的精彩比赛!1 比赛流程及任务参赛队到达比赛场地后,应按以下顺序完成各项任务。
1.1 机器人的设置1.1.1 比赛开始前,有1分钟的机器人设置时间。
1.1.2 每支参赛队最多有三名队员进行机器人的设置,协助队员不得参与设置。
1.1.3 在一分钟内没有完成设置的参赛队在比赛开始后可以继续进行设置。
1.2 比赛开始时机器人和参赛队员的位置1.2.1 机器人A必须从启动区A1启动。
1.2.2 机器人B必须从启动区B启动。
风机螺旋桨必须放在机器人B上。
校园机器人竞赛策划方案
校园机器人竞赛策划方案一、引言校园机器人竞赛是一项旨在培养学生创新思维和动手能力的活动。
通过参与机器人竞赛,学生可以锻炼自己的团队合作能力,提升科学技术水平,同时也能够培养学生对机器人技术的兴趣和热爱。
本文将介绍一个校园机器人竞赛的策划方案。
二、竞赛目标1. 激发学生创新思维和动手能力,培养学生对机器人技术的兴趣。
2. 培养学生团队协作与沟通能力,提高解决问题的能力。
3. 推广机器人技术在校园的应用,促进学科间的综合交流。
三、竞赛内容1. 竞赛分为初赛和决赛两个阶段。
a) 初赛:参赛队伍需设计并制作能够完成指定任务的机器人,并参加预选赛。
b) 决赛:初赛前三名将晋级到决赛,冠军将在决赛中产生。
2. 比赛项目:a) 自主导航:机器人需在指定区域内自主导航,避开障碍物。
b) 抓取物体:机器人需准确抓取指定物体并放置到目标区域。
c) 任务协作:多个机器人团队需要进行任务协作,完成复杂的协同任务。
四、赛制与奖励1. 初赛:a) 参赛队伍将进行机器人展示和展示说明,评委将根据机器人设计和功能评分。
b) 前三名队伍将晋级到决赛。
2. 决赛:a) 决赛将设置更加复杂的任务和挑战,评委将评估机器人设计、任务完成度等。
b) 决赛将评选出冠军、亚军和季军队伍,并颁发奖杯和奖品。
3. 额外奖项:a) 最佳创意奖:评选出在机器人设计和功能上有独特创意的参赛队伍。
b) 最佳团队合作奖:评选出在比赛中合作默契的队伍。
c) 最佳口头演示奖:评选出在展示环节中表现出色的队伍。
五、组织与宣传1. 组织:a) 设立竞赛组织委员会,负责竞赛的策划、组织与执行。
b) 配备专业评委团队,包括机器人专家、教师和行业从业人员。
2. 宣传:a) 利用校园广播、校内电子屏等宣传校园机器人竞赛活动。
b) 制作宣传海报和宣传册,宣传竞赛各项细节和参赛报名信息。
c) 利用社交媒体平台(微信公众号、学校网站等)发布相关竞赛信息。
六、参赛报名与费用1. 参赛报名:a) 对全校学生和各个年级开放报名,队伍成员应不少于3人,每个队伍需指定一名指导教师。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2015亚太大学生机器人大赛
ROBCON简易方案
设计者:1320331
刘帮
对于设计2015届ROBCON的机器人,个人没有什么真知灼见,只希望能够抛砖引玉,提供一点微薄之力。
由实际中打羽毛球的情形,方案可以分为以下几个部分:
一.发球阶段
二.运动(检测)阶段
三.击球阶段
四.通信及其他
下面来具体说明这几个阶段:
一.发球阶段:
如图:
为了更好的利用机器人身上的空间,携球部分可以设计成像左轮手枪那样,掉下一个球旋转一下,就可以设计成只让一个拍子发球。
那么怎样让球拍知道该什么时候打球呢,我们可以在爪子和球拍之间加一个红外线传感器,如图中所示,当红外线检测到球时,拍子即可运动把球击出,当然红外线传感器的位置要事先由测试或者仿真计算得出。
二.运动(检测)阶段:
由于这一阶段比较复杂,于是我们可以将其细分为以下几个阶段
1.检测对方的球的落点;由实际打羽毛球的经验,人
始终是面对着网子的,我们也可以把机器人设计成
像人那样,设定一个参考面,前方就一直是面对网
子的。
为了检测对方的球,本人想到一个方法,就
是三维空间定位,但在网上收索,发现这种技术并
不是特别成熟,而且传感器还要安装在待测运动物
体身上,好像不可取。
于是我又想到了蝙蝠的超声
定位,我们可以在机器人的前上方180度范围内安
装超声波传感器,检测到球的运动轨迹,用于检测
球的落点位置。
在网上还看到一个视频,机器人是
通过两个摄像头来定位羽毛球,但具体怎样设置,
就不是很清楚了,不过可以尝试一下。
2.机器人在场上的运动:机器人的地盘建议用麦克纳
姆轮,这种轮子大家都知道,通过使用落地码盘和
陀螺仪加上程序的算法控制各个轮子的转速而达到
任意方位的移动。
机器人的初始位置为一左一右,
以场中线为分隔线,当超声波检测到球的落点时,
机器人迅速过去,检测到球落在哪边就由那边的机
器人过去,若检测到球会落到中间可设定为一个机
器人去接球,当机器人接到球后就迅速回到初始位
置。
3.两个机器人之间的通信:两个机器人犹如两个人一
样需要互相配合,他们之间需要互相传递各自的位
置以及羽毛球与自己的距离和运动轨迹,从而确定
该由哪个机器人击球。
场上只允许一个机器人运动,防止了两个机器人相撞。
三.击球阶段:
此阶段对于机械的要求比较高,我们可以把机械臂设计成有三个电机带动的,可绕X.Y.Z轴旋转,如图:
还有根据羽毛球的轨迹,用算法设定让三个电机的配合使球拍面垂直与球的运动轨迹。
击球装置与发球装置分开,我准备只设置一个回球装置,这样产生的相互干扰会少一点,设计也简单一些。
本来想着用气缸,但后来想想,不知道要打多少回合,气用完了怎么办,于是就想着采用电的控制,就用那三个电机,看过网上的视频,他们都没有用气缸,都是用电机,不过这对于电机的性能要求会比较高,既要扭力大,又要速度快。
为了更好的赢得比赛,我们还可以设计扣球,但是鉴于机器人跳动起来可能会对自身的结构有影响,我不采用跳跃式的,我会采用上下伸缩式来模拟扣球,即当检测到球的运动轨迹打到一定的高度时,我们可以设计成让机器人升起来,这个也应该用上述所说的电机,可能不止用一个。
不过我又想到一个方案,可不可以用液压传动呢?
液压传动的基本原理即帕斯卡原理的基本运用,即:
1 液体中各点的压力在所有的方向上均相等。
2 液体压力总是垂直作用于液体内任意表面。
3 作用在密闭容器内的静止液体的一部分上的压力,以相等的强度(压力)传递到液体的所有部分。
每当机器人完成一个回球动作,机器人都应回到初始姿态。
四.通信及其他:
因为规则上说羽毛球接触机器人的身体就算输,接触电缆线也算,我就想设计成无线的,根据规则中提供的无线通信方法,我们可以设计成蓝牙控制,因为红外线超声波和其他可见光可能受到的自然因素干扰会大一点,但还是要注意蓝牙信号一定要强,防止干扰。
遥控只是起到微调作用,但必须要有设定开关按钮,以防出现安全事故。
机器人材料的选择;我们可以把机器人设计成铝合金的,这种材料比较轻便,易加工,其次是碳纤维,不过这种材料比较贵,看情况的需要而定。
对于机器人,我们可以通过matalab仿真,不仅可以预测出羽毛球的落点,还可以进行全场定位。
制作者总结:
这个方案仅仅是个人的浅显见解,还有好多细节没注意到也不知道怎么弄,一个人的力量是远远不够的,我只希望我的这点见解能够对机器人队有一点点帮助就行,当然我会继续努力,为机器人队加油!。