极点配置直接自校正控制最小相位确定性系统Word文档
自适应控制--极点配置自校正
A F 1zdBGA m A 0
degF1 degB1 d 1
(14)
degGdegA1
并且右边的阶次小于等于左边阶次,即
d egA 0„d egA F 1d egA m
(15)
现将以上叙述归纳一下:
已知:过程多项式A、z-d和B;
性能要求:期望传递函数分母多项式Am;
1) 对多项式B进行因式分解,BBB,求
(3-2)
其中 F(z1)、R(z1) 和 G ( z 1 ) 为待定多项式,且 F ( z 1 ) 为首一多项式, y r ( k ) 为参考 输入。
这样构成的控制系统方框图见图2,表达式如下。
24
yr (k)
R( z 1 ) F (z1)
(k)
1 A( z 1 )
u(k)
y(k)
zd B(z1)
然后在式(10)中,假定它的左右两边各项有相同阶次,进而确 定和G的阶次,再根据左右两边相同阶次的系数应相等列代数方
程,并解之。
例1 极点配置设计1
设有被控对象:
( 1 1 .3 z 1 0 .3 z 2 ) y ( k ) ( z 2 1 .5 z 3 ) u ( k ) ( k )
两种自校正控制方法 间接自校正控制:按“模型参数-控制器参数-控制量算法”过程获得
的控制量,由于控制器参数是通过模型参数估计间接得到的故取名间接自校正 控制,又由于模型参数有明确的表达式,故又称为显式自校正控制。特点:直 观清晰,便于模块化设计,但计算量大。
直接自校正控制:不用估计模型参数,而是通过输入输出信息直接估计
则反馈系统的系统矩阵为:
0
1
0
L
0
0
1
L
现代控制理论-第四章 极点配置问题
现代控制理论-第四章极点配置问题第四章线性定常系统的综合第四章线性定常系统的综合内容:4.1 线性反馈控制系统的基本结构及其对系统特性的影响4.2 SISO系统的极点配置4.3 系统镇定问题4.4 系统解耦问题4.5 状态观测器4.6 利用状态观测器实现状态反馈前面介绍的内容都属于系统的描述与分析。
系统的描述:主要解决系统的建模、各种数学模型(时域、频域、内部、外部描述)之间的相互转换等。
系统的分析:主要研究系统的定量变化规律(如状态方程的解,即系统的运动分析等)和定性行为(如能控性、能观测性、稳定性等)。
在本章中,将主要讨论在不同形式的性能指标下线性定常系统的反馈控制规律的综合方法,包括建立可综合的条件及建立控制规律及其算法。
综合与设计问题:在已知系统结构、参数(被控系统数学模型) 及期望的系统运动形式或特征的基础上,确定施加于受控系统的控制规律与参数,称为综合。
当系统以状态空间描述以后,系统的状态含有系统的全部运动信息。
若将控制信号设计为状态与参考信号的函数形成闭环控制,便可得到相当好的控制效果。
无论在抗扰动或抗参数变动方面,反馈系统的性能都远优于非反馈系统。
综合问题中的性能指标可区分为非优化型性能指标和优化型性能指标两种类型,它们都规定着综合所得系统运动过程的期望性能。
两者的差别是:非优化指标是—类不等式型的指标,即只要性能值达到或好于期望指标就算实现了综合目标;优化型指标则是一类极值型指标,综合目的是要使性能指标在所有可能值中取极值。
本章讨论的综合问题主要涉及的是非优化型指标,它们可能以一组期望的闭环系统极点作为性能指标,来讨论极点配置问题。
系统运动的状态也即其动态性能,主要是由系统的极点位置所决定。
把闭环极点组配置到所希望的位置上,实际上等价于使综合得到的系统的动态性能达到期望的要求。
以渐近稳定作为性能指标,主要讨论各种反馈结构对系统稳定性的影响。
使“多输入—多输出”系统实现“一个输入只控制相应的某个输出”作为性1第四章线性定常系统的综合能指标,其相应的综合问题即为解耦控制问题。
线性系统理论6极点配置与特征结构配置-文档资料
x Ax Bu
y
Cx
Du
可用状态反馈任意配置极点。
定理6.2.1 定常线性系统
x Ax Bu
y
Cx
Du
可用状态反馈任意配置极点的充要条件
是该系统完全能控。
定义6.2.2 设 A Rnn,则矩阵 A
称为循环的,当且仅当其特征多项式等 同于其最小多项式,或其Jordan标准型 中相应于每个不同的特征值仅有一个 Jordan块。
第六章 极点配置与特征 结构配置
6.1 线性系统的常规控制律
线性定常系统
x Ax Bu Ed
y
Cx
Du
d Rl 为干扰信号,E Rnl 干扰输入矩阵。
6.1.1 线性定常状态反馈控制律
线性定常状态反馈控制律 :
u Kx Gv
系统在状态反馈律: u Kx Gv 作用下
的闭环系统为:
第三步:计算 k a0 a0 a1 a1 an1 an1
第四步:计算变换阵
P An1b
1
Ab
b
an1
a1
1
an1 1
第五步:求 Q P1 第六步:所求的增益阵 k kQ
例6.3.1 给定单输入线性定常为
0 0 0 1
x 1 6
0
x
0
u
0 1 12 0
再给定期望的一组闭环特征值为
反馈律保持其输入解耦零点和输出解 耦零点不变,从而保持其能控性和能 观性不变。
6.1.3 线性定常输出动态补偿器
输出反馈律不含动态环节为静态输出 反馈,动态补偿器含有动态环节,称为动 态输出反馈。其一般形式为:
z
Fz
Hy
Lv,
z0
z0
控制系统的极点配置设计法
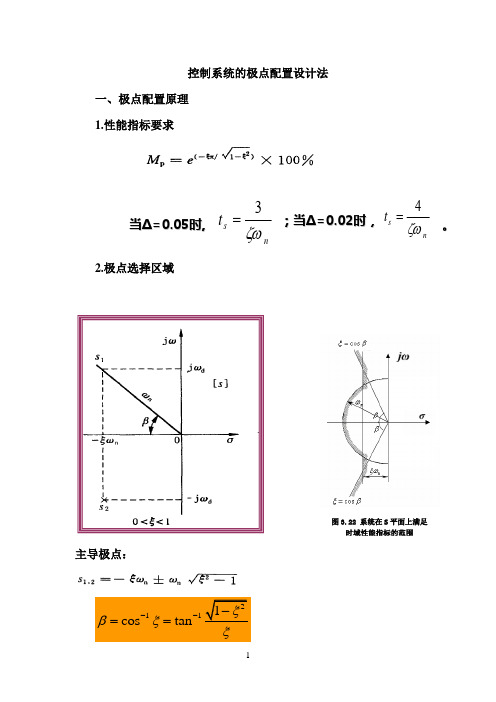
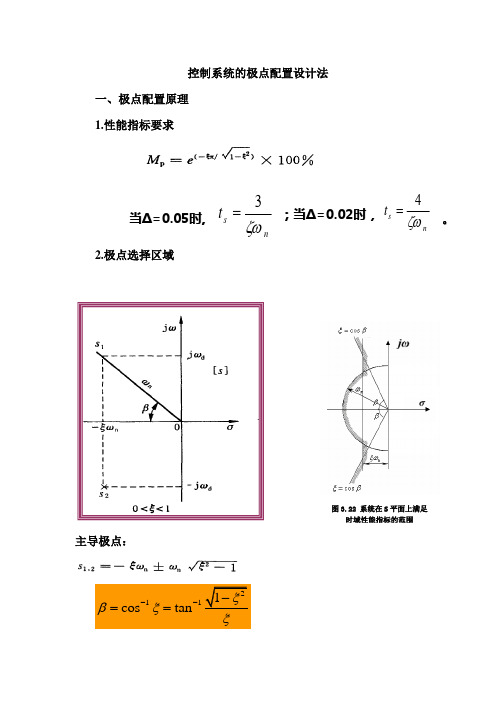
控制系统的极点配置设计法一、极点配置原理1.性能指标要求2.极点选择区域主导极点:nstζω4=;当Δ=0.02时,。
nstζω3=当Δ=0.05时,3.其它极点配置原则系统传递函数极点在s 平面上的分布如图(a )所示。
极点s 3距虚轴距离不小于共轭复数极点s 1、s 2距虚轴距离的5倍,即n s s ξω5Re 5Re 13=≥(此处ξ,n ω对应于极点s 1、s 2);同时,极点s 1、s 2的附近不存在系统的零点。
由以上条件可算出与极点s 3所对应的过渡过程分量的调整时间为1351451s n s t t =⨯≤ξω式中1s t 是极点s 1、s 2所对应过渡过程的调整时间。
图(b )表示图(a )所示的单位阶跃响应函数的分量。
由图可知,由共轭复数极点s 1、s 2确定的分量在该系统的单位阶跃响应函数中起主导作用,即主导极点。
因为它衰减得最慢。
其它远离虚轴的极点s 3、s 4、s 5 所对应的单位阶跃响应衰减较快,它们仅在极短时间内产生一定的影响。
因此,对系统过渡过程进行近似分析时。
可以忽略这些分量对系统过渡过程的影响。
n x o (t)(a )(b )系统极点的位置与阶跃响应的关系二、极点配置实例磁悬浮轴承控制系统设计1.1磁悬浮轴承系统工作原理图1是一个主动控制的磁悬浮轴承系统原理图。
主要由被悬浮转子、传感器、控制器和执行器(包括电磁铁和功率放大器)四大部分组成。
设电磁铁绕组上的电流为I0,它对转子产生的吸力F和转子的重力mg相平衡,转子处于悬浮的平衡位置,这个位置称为参考位置。
(a)(b)图1 磁悬浮轴承系统的工作原理Fig.1 The magnetic suspension bearing system principledrawing假设在参考位置上,转子受到一个向下的扰动,转子就会偏离其参考位置向下运动,此时传感器检测出转子偏离其参考位置的位移,控制器将这一位移信号变换成控制信号,功率放大器又将该控制信号变换成控制电流I0+i,控制电流由I0增加到I0+i,因此,电磁铁的吸力变大了,从而驱动转子返回到原来的平衡位置。
系统的能控性与能观性分析及状态反馈极点配置要点

实 验 报 告课程 自动控制原理 实验日期 12 月26 日 专业班级 姓名 学号实验名称 系统的能控性与能观性分析及状态反馈极点配置 评分批阅教师签字一、实验目的加深理解能观测性、能控性、稳定性、最小实现等观念,掌握状态反馈极点配置方法,掌握如何使用MATLAB 进行以下分析和实现。
1、系统的能观测性、能控性分析;2、系统的最小实现;3、进行状态反馈系统的极点配置;4、研究不同配置对系统动态特性的影响。
二、实验内容1.能控性、能观测性及系统实现(a )了解以下命令的功能;自选对象模型,进行运算,并写出结果。
gram, ctrb, obsv, lyap, ctrbf, obsvf, mineral ; (b )已知连续系统的传递函数模型,182710)(23++++=s s s as s G ,当a 分别取-1,0,1时,判别系统的能控性与能观测性;(c )已知系统矩阵为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=2101013333.06667.10666.6A ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=110B ,[]201=C ,判别系统的能控性与能观测性;(d )求系统1827101)(23++++=s s s s s G 的最小实现。
2.实验内容原系统如图1-2所示。
图中,X 1和X 2是可以测量的状态变量。
图1-2 系统结构图试设计状态反馈矩阵,使系统加入状态反馈后其动态性能指标满足给定的要求:(1) 已知:K=10,T=1秒,要求加入状态反馈后系统的动态性能指标为:σ%≤20%,ts≤1秒。
(2) 已知:K=1,T=0.05秒,要求加入状态反馈后系统的动态性能指标为:σ%≤5%,ts≤0.5秒。
状态反馈后的系统,如图1-3所示:图1-3 状态反馈后系统结构图分别观测状态反馈前后两个系统的阶跃响应曲线,并检验系统的动态性能指标是否满足设计要求。
三、实验环境 1、计算机1台;2、MATLAB6.5软件1套。
四、实验原理(或程序框图)及步骤 1、系统能控性、能观性分析设系统的状态空间表达式如下:p m n R y R u R x Du Cx y Bu Ax x∈∈∈⎩⎨⎧+=+=(1-1)其中A 为n ×n 维状态矩阵;B 为n ×m 维输入矩阵;C 为p ×n 维输出矩阵;D 为p ×m 维传递矩阵,一般情况下为0。
极点配置

只要原系统(A,B,C)是能控(见 能控性)的,则这样的反馈增益矩阵K就一定可以找到。反馈 增益矩阵K的 求解,对于单输入单输出情况,已有较为简单的计算公式;对于一般的多输入多输出情况,计算步骤要复杂得多, 往往需要采用计算机来处理。
极点配置
数学术语0103 定Fra bibliotek 05 配置方法
目录
02 意义 04 状态反馈
通过比例环节的反馈把定常线性系统的极点移置到预定位置的一种综合原理。 极点配置的实质是用比例反馈去改变原系统的自由运动模式,以满足设计规定的性能要求。
pole assignment
极点配置定常线性系统的动态特性在很大程度上取决于它的传递函数矩阵(见传递函数)的极点在复数平面 (表示复数 s=x+jy的直角坐标平面)上的位置。
谢谢观看
首先必须指出,状态空间中,任意极点配置的充分且必要的条件是,系统必须是完全状态可控的。
配置方法
如果已知系统的模型或传递函数,通过引入某种控制器,使得闭环系统的极点可以移动到指定的位置,从而 使系统的动态性能得到改善,这种方法称为极点配置法。
有一控制系统其中a>b>0,要求设计一个控制器,使系统稳定, 解:(1)校正前,闭环系统的极点: s-a+s+b=0 s= > 0 因而控制系统不稳定。 (2)在控制对象前串联一个一阶惯性环节, c>0,则闭环系统极点: 显然,当 c-a+1>0,b-ac>0时,系统可以稳定。但此对参数 c的选择依赖于 a、 b。因而,可 选择控制器, c、 d,则有特征方程: 当b+d+c>a,时,系统稳定。 本例由于原开环系统不稳定,因而不能通过简单的零极点相消方式进行控制器的设计,其原因在于控制器的 参数在具体实现中无法那么准确,从而可能导致校正后的系统仍不稳定。
自适应控制-- 极点配置自校正共50页文档
46、我们若已接受最坏的,就再没有什么损失。——卡耐基 47、书到用时方恨少、事非经过不知难。——陆游 48、书籍把我们引入最美好的社会,使我们认识各个时代的伟大智者。——史美尔斯 49、熟读唐诗三百首,不会作诗也会吟。——孙洙 50、谁和我一样用功,谁就会和我一样成功。——莫扎特源自自适应控制-- 极点配置自校正
36、“不可能”这个字(法语是一个字 ),只 在愚人 的字典 中找得 到。--拿 破仑。 37、不要生气要争气,不要看破要突 破,不 要嫉妒 要欣赏 ,不要 托延要 积极, 不要心 动要行 动。 38、勤奋,机会,乐观是成功的三要 素。(注 意:传 统观念 认为勤 奋和机 会是成 功的要 素,但 是经过 统计学 和成功 人士的 分析得 出,乐 观是成 功的第 三要素 。
(完整版)控制系统的极点配置设计法
控制系统的极点配置设计法一、极点配置原理1.性能指标要求2.极点选择区域主导极点:2111cos tanξβξξ---==图3.22 系统在S平面上满足时域性能指标的范围nstζω4=;当Δ=0.02时,。
nstζω3=当Δ=0.05时,3.其它极点配置原则系统传递函数极点在s 平面上的分布如图(a )所示。
极点s 3距虚轴距离不小于共轭复数极点s 1、s 2距虚轴距离的5倍,即n s s ξω5Re 5Re 13=≥(此处ξ,n ω对应于极点s 1、s 2);同时,极点s 1、s 2的附近不存在系统的零点。
由以上条件可算出与极点s 3所对应的过渡过程分量的调整时间为1351451s n s t t =⨯≤ξω 式中1s t 是极点s 1、s 2所对应过渡过程的调整时间。
图(b )表示图(a )所示的单位阶跃响应函数的分量。
由图可知,由共轭复数极点s 1、s 2确定的分量在该系统的单位阶跃响应函数中起主导作用,即主导极点。
因为它衰减得最慢。
其它远离虚轴的极点s 3、s 4、s 5 所对应的单位阶跃响应衰减较快,它们仅在极短时间内产生一定的影响。
因此,对系统过渡过程进行近似分析时。
可以忽略这些分量对系统过渡过程的影响。
n x o (t)(a )(b )系统极点的位置与阶跃响应的关系二、极点配置实例磁悬浮轴承控制系统设计1.1磁悬浮轴承系统工作原理图1是一个主动控制的磁悬浮轴承系统原理图。
主要由被悬浮转子、传感器、控制器和执行器(包括电磁铁和功率放大器)四大部分组成。
设电磁铁绕组上的电流为I0,它对转子产生的吸力F和转子的重力mg相平衡,转子处于悬浮的平衡位置,这个位置称为参考位置。
(a)(b)图1 磁悬浮轴承系统的工作原理Fig.1 The magnetic suspension bearing system principledrawing假设在参考位置上,转子受到一个向下的扰动,转子就会偏离其参考位置向下运动,此时传感器检测出转子偏离其参考位置的位移,控制器将这一位移信号变换成控制信号,功率放大器又将该控制信号变换成控制电流I0+i,控制电流由I0增加到I0+i,因此,电磁铁的吸力变大了,从而驱动转子返回到原来的平衡位置。
(完整word版)PID控制
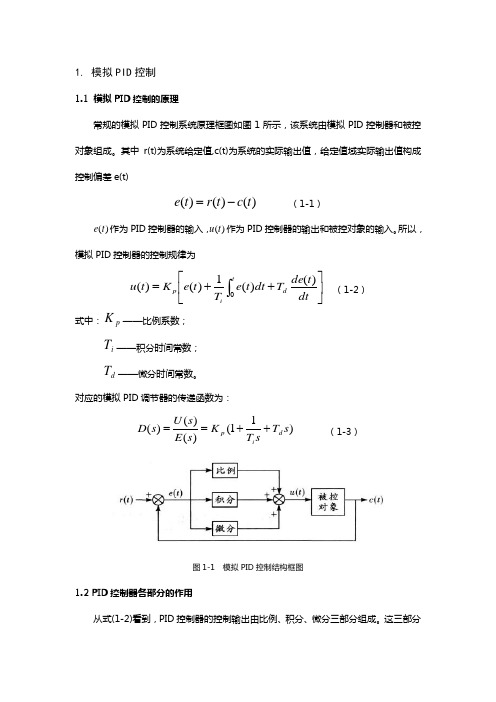
1. 模拟PID 控制1.1 模拟PID 控制的原理常规的模拟PID 控制系统原理框图如图1所示,该系统由模拟PID 控制器和被控对象组成。
其中r(t)为系统给定值,c(t)为系统的实际输出值,给定值域实际输出值构成控制偏差e(t))()()(t c t r t e -= (1-1))(t e 作为PID 控制器的输入,)(t u 作为PID 控制器的输出和被控对象的输入。
所以,模拟PID 控制器的控制规律为 ⎥⎦⎤⎢⎣⎡++=⎰t d i p dt t de T dt t e T t e K t u 0)()(1)()( (1-2) 式中:p K ——比例系数;i T ——积分时间常数; d T ——微分时间常数。
对应的模拟PID 调节器的传递函数为:)11()()()(s T sT K s E s U s D d i p ++== (1-3)图1-1 模拟PID 控制结构框图1.2 PID 控制器各部分的作用从式(1-2)看到,PID 控制器的控制输出由比例、积分、微分三部分组成。
这三部分分别是:(1)比例部分)(t e K P在比例部分,比例系数p K 的作用在于加快系统的响应速度,提高系统调节精度。
加大p K 值,可以提高系统的开环增益,加快系统的响应速度,减小系统稳态误差,从而提高系统的控制精度,但会降低系统的相对稳定性,甚至可能造成闭环系统不稳定,使系统动、静态特性变坏。
(2)积分部分⎰ti pdt t e T K 0)( 从积分部分的数学表达式可以知道,只要存在偏差,则它的控制作用就会不断积累。
由于积分作用,当输入e(t)消失后,输出信号的积分部分⎰ti pdt t e T K 0)(有可能是一个不为零的常数。
可见,积分部分的作用可以消除系统的偏差。
在串联校正时,采用I 控制器可以提高系统的型别,以消除或减小系统的稳态误差,改善系统的稳态性能。
但积分控制使系统增加了一个位于原点的开环极点,使信号产生90°的相角滞后,于系统的稳定性不利。
零极点配置自校正
(2) 不引入积分器 由(2.6.11)式知为使 y (k ) 与 (k )之间的传递函数的稳 1 E ( z )必须取为 态值为1, E (1) C (1)T (1) / B (1) (2.6.16)
通过(2.6.6)(2.6.7)和(2.6.9)式解得 G(z1), H(z1) , deg G na , deg H1 n ,并利用( 2.6.15)或(2.6.14)求得 E ( z 1 ) b 后,即可由(2.6.2)式计算零极点配置控制律。 上述零极点配置控制算法可适用于开环不稳的非最小相位 系统,但要求分解 B( z 1 ) 为 B ( z 1 ) 和 B ( z 1 ) ,在自适应情况下不 易在线实现。下面介绍三种不用分解的零极点配置算法。
1 1 1 G ( z ), H ( z ), E ( z ) 的多项式后,即可按(2.6.2)式 求得 计算对消所有过程零点的零极点配置控制律。
2.保留所有过程零点 当被控系统有过程零点在单位圆外时,可采用保留过程全部 零点的零极点配置算法,这时的极点配置(2.6.9)是应写成 A(z1)H(z1) B(z1)G(z1) C(z1)T (z1) deg H nb 1, deg G na 1, deg T na nb nc 1 由于A( z 1 ) 与 B( z 1 ) 互质,上式一定有解。
(2.6.11)
1 1 从上式可看出:选择 C ( z )T ( z ) 作为闭环系统的极点可 1 C ( z ) ,从而可对随机干扰进行抑制。 对消噪声项系数多项式
对于最小相位系统,这种零极点配置方案,可导出最小方 差控制规律。如系统延时为d,选择 H ( z 1 ) z d F ( z 1 ) B( z 1 ), T ( z 1 ) 1 ,则(2.6.9)和(2.6.10)式变为 (2.6.12) A( z 1 ) F ( z 1 ) z d G ( z 1 ) C ( z 1 )
第三章 自校正控制系统-1

3-1. 1. 概述概述3-2. 2. 准备知识准备知识3-3. 3. 最小方差控制最小方差控制43-4. 4. 自校正调节器自校正调节器3-5. 5. 广义最小方差控制广义最小方差控制3-6. 6. 自校正控制器自校正控制器3-7. 7. 极点配置技术极点配置技术3-8. 8. 广义最小方差极点配置技术广义最小方差极点配置技术•自校正控制技术,作为自适应控制的一个分支,其发展速度是十分迅速的,不论在理论研究还是技术应用方面,都取得了丰硕成果。
•但是随着科学技术发展的要求,自校正控制技术的理论研究和技术应用都还需要向纵深发展。
•目前,自校正控制技术的算法还比较复杂,算法本身的稳定性和收敛性方面虽然有些已取得了比较好的证明,但还有一些尚未得到比较满意的•另外,自校正控制系统是非线性时变系统,对这样一种闭环系统,需精确分析其动态性能,目前还没有得到比较有效而具有普遍意义的方法。
•因此,不论在改进自校正控制技术算法本身,还是对整个自校正控制系统的性能进行精确的分析,都还有待于作深入的研究,使之更完善。
1958年•Kalman 首先提出,但未被采用1970年•Peterka 在他的论文中利用自校正的概念解决噪声系统的自适应数字调整时,方得到广泛的重视。
1973年•Astrom 和Witlenmark 于1973年提出自校正调节器的原理后,自校正概念才得到技术上的突破。
Anbumani等人在1981年研究了Hammerstein模型非线性系统的自校正最小方差控制,Toivonen讨论了具有输入幅值限制的最小方差控制,这些进展把自校正控制水平提到一个新的高度。
1975年Clarke 和Gawthrop 提出了自校正控制器,它针对自校正调节器在非最小相位对象时不稳定的缺点,利用广义最小方差控制策略使控制系统不管用在最小相位对象或非最小相位对象都能稳定。
1982年Grimble提出的加权最小方差控制器,能很好地用在非线性对象和动态特性未知的系统。
自适应控制基本原理-自校正控制
2.2 动态过程参数估计的最小二乘法
2.2.1 基本最小二乘方法
A(z1) y(k) B(z1)u(k) (k)
A(z1) 1 a1z1 an zn B(z1) b0 b1z1 bn zn
记:
θ [a1, a2 ,, an ,b0 ,b1,,bn ]T
自校正控制
自校正控制
最小方差自校正控制器 极点配置自校正控制器 自校正PID控制
自校正控制
自校正控制系统又称自优化控制或模型辨识自适应控制。
通过采集的过程输入、输出信息,实现过程模型的在线辨识和参数估计。 在获得的过程模型或估计参数的基础上,按照一定的性能优化准则,计算控 制参数,使得闭环系统能够达到最优的控制品质。
矩阵求逆定理 设A 、C 和 BCD均为非奇异矩阵,则
A BCD 1 A1 A1B C 1 DA1B 1 DA1
(2.58)
令
P(N) ΦT (N)Φ(N) 1
(2.59)
2.2 动态过程参数估计的最小二乘法
2.2.2 递推最小二乘方法
P(N 1) ΦT (N)Φ(N) (N 1) T (N 1) 1 P1(N) (N 1) T (N 1) 1
(2.45a) (2.45b)
(k) 为独立的随机噪声,要求其满足
E( (k)) 0
(2.46a)
2 E{ (i) ( j)}
i j
0 i j
(2.46b)
lim
1
N
(k)2
N N
k 1
(2.46c)
随机噪声的均值为零,彼此相互独立,方差为有限正值,噪声的采样均方值有界。
自适应控制-- 极点配置自校正
0 1 0 an 2 f 3
0 1 a1 f n 0
∴反馈系统的传函:
cn1s n1 c1s c0 Y ( s) n R(s) s (a1 f n )s n1 (an1 f 2 )s (an f1 )
只要适当选择F中的 f1 , f 2 , f n 可使系统的极点按性能 指标要求得到任意配置. 注意: 状态反馈不影响SISO系统的零点,通过状态反馈 不能任意配置系统的零点。
例题: 已知线性定常系统的传递函数为:
Y ( s) 1 1 3 U ( s) s( s 1)( s 2) s 3s 2 2s
(15)
Bm0
Am (1) ; B (1)
2) 由式(14)确定F1和 G 的阶次;综合考虑式 (13) 和
(15),确定A0的阶次(尽量低),并由不低于Am响应速度来确
定器系数; 3) 由(10)解出 F1 和 G; 4) 由式(6)确定F,由式(9)确定R,最后由式(2) 算出控制量 u(k)。
deg G deg A 1
所以有
deg Ac 2deg A 1
再考虑式(12),有
deg A0 …2deg A 1 deg Am deg B
(13)
29
B 和d均为已知,当 Am A0 确定以后,可求出多项 式 (10) 中A、
式F1和G。当A和B-互质时,满足该等式的解有无穷组。为使问题 有解 ,不妨假设式(10)左边两项有相同的阶次,并规定
25
1
闭环特征多项式为
A( z 1 )F ( z 1 ) z d B( z 1 )G( z 1 ) Ac ( z 1 )
11_自适应控制_极点配置自校正
设计一个极点配置自校正调节器使系统稳定
39 11
例 :对象的数学模型
yt a1 yt 1 b0 u t 1 t
解: 式中
C z 1
B z b0
A z 1 a1 z 1
na 1, nb 0, nc 0, k 1
闭环系统
1 p1 c1 a1 z 1 1 y t F z t t 1 P z 1 p1 z
39
16
例: 过程
1 a z yt z 1 b z ut 1 c z t
1 2 1 1 1 1 1
yt a1 yt 1 z 3 b0 b1 z 1 b2 z 2 u t t c1 t 1
yt a1 yt 1 a2 yt 2 z 2 b0 b1 z 1 u t t c1 t 1
1
0
等式两边同次幂的系数可得:
f1 g 0 0.3 f1 1.5 g 0 0.1
39 8
解此方程得到 于是 闭环系统
g 0 0.16,
f1 0.14
Gz 0.16 Gc z F z 1 0.14 z 1
F z C z F z 1 0.14 z 1 y t t t t k 1 Az F z z Bz G z P z 1 0.5 z
n p nc na nb k 1
39
右边阶次高于左边
6
n p na nb nc k 1
例 :对象的数学模型
yt yt 1 ut 1 1.5ut 2 t 0.2 t 1
单入单出系统极点配置自校正控制
单入单出系统极点配置自校正控制【摘要】本文对单入单出系统的自校正控制率进行了设计,并进行了仿真实验,结果表明达到了极点配置的目标。
【关键词】单入单出系统极点配置自校正控制1极点配置概述在控制系统中,系统的性能及各种品质在很大程度上是由闭环系统的零点和极点决定的.传递函数的极点位置决定系统的稳定性,而零点和极点的综合分布会影响到系统的响应品质.极点配置就是通过一个反馈矩阵的选取,使闭环系统的极点配置在希望的位置,从而使系统具有较满意的性能指标.极点配置的设计方法具有明确的目标和直观的物理意义,可以用于开环不稳定、非逆稳系统,使闭环系统的稳定性得到保证.2自校正极点配置控制2.1系统描述设被控系统的数学模型为(1)其中(2)其中定义为幅值未知,可分段用时间的多项式描述的有界扰动,满足(3)为正弦波类型的周期性扰动,定义为(4)且存在适当的,使得(5)为方便起见,记.设参考输入信号有界,其动态特性满足(6)对于(1)给出的系统,首先按照模型已知p(10)为前馈控制器,主要解决输出信号对参考输入信号的跟踪问题.由下式确定(11)当参考输入取为常值或渐进为常值时,可简单地取(12)可得(13)显然,、、及控制律的设计配置了极点、消除了确定性扰动的影响、能够实现稳态无误差跟踪.3仿真实例过程模型为,将极点配置在,的位置,要求在常值参考输入下,静态跟踪误差为零.直接式极点配置自校正控制算法所得仿真结果如图1所示:参考文献[1]刘贺平.直接辨识扰动模型的内模极点配置自适应控制.自动化学报,1998,24(4):502-506.[2]Elliott H.Direct adaptive pole placement with application to nonminimum phase systems.IEEE Trans on AC,1982,27(3):720-722.[3]Rohra CE et.Robustness of Adaptive Control Algorithm in the Presence of Unmodeled Dynamics.In Proceedings of the21st IEEE CDC,Orlando Florida,1982:3-11.[4]冯纯伯,史维.自适应控制.北京:电子工业出版社,1986.[5]赵国良,姜仁锋.自适应控制技术与应用.北京:人民交通出版社,1991.。
线性定常系统的极点配置50页文档

▪
29、勇猛、大胆和坚定的决心能够抵得上0、意志是一个强壮的盲人,倚靠在明眼的跛子肩上。——叔本华
谢谢!
50
线性定常系统的极点配置
51、没有哪个社会可以制订一部永远 适用的 宪法, 甚至一 条永远 适用的 法律。 ——杰 斐逊 52、法律源于人的自卫本能。——英 格索尔
53、人们通常会发现,法律就是这样 一种的 网,触 犯法律 的人, 小的可 以穿网 而过, 大的可 以破网 而出, 只有中 等的才 会坠入 网中。 ——申 斯通 54、法律就是法律它是一座雄伟的大 夏,庇 护着我 们大家 ;它的 每一块 砖石都 垒在另 一块砖 石上。 ——高 尔斯华 绥 55、今天的法律未必明天仍是法律。 ——罗·伯顿
▪
26、要使整个人生都过得舒适、愉快,这是不可能的,因为人类必须具备一种能应付逆境的态度。——卢梭
▪
27、只有把抱怨环境的心情,化为上进的力量,才是成功的保证。——罗曼·罗兰
▪
28、知之者不如好之者,好之者不如乐之者。——孔子
自适应控制-- 极点配置自校正共50页文档

44、卓越的人一大优点是:在不利与艰 难的遭遇里百折不饶。——贝多芬
45、自己的饭量自己知道。——苏联
Байду номын сангаас
自适应控制-- 极点配置自校 正
41、实际上,我们想要的不是针对犯 罪的法 律,而 是针对 疯狂的 法律。 ——马 克·吐温 42、法律的力量应当跟随着公民,就 像影子 跟随着 身体一 样。— —贝卡 利亚 43、法律和制度必须跟上人类思想进 步。— —杰弗 逊 44、人类受制于法律,法律受制于情 理。— —托·富 勒
45、法律的制定是为了保证每一个人 自由发 挥自己 的才能 ,而不 是为了 束缚他 的才能 。—— 罗伯斯 庇尔
41、学问是异常珍贵的东西,从任何源泉吸 收都不可耻。——阿卜·日·法拉兹
42、只有在人群中间,才能认识自 己。——德国
第3章自校正算法
结论:通过改变加权系数的值一定可以使 闭环系统稳定(因为C和A稳定)。
3.3 广义最小方差自校正控制器(续)
2. 带有辅助变量的最小方差控制器 (1)问题
广义最小方差尚需解决稳态偏差问题,因为采用广义 最小方差性能指标中含有 u2 (k ) 项,稳态时必将使 y 2(k + d ) 产生某一数值,来补偿 u2 (k ) 的值,而在稳态时 y(k d ) 0 产生了稳态偏差;而且不便于处理设定值问题。
进行控制; ⑤使k—k+1重复进行上面4个步骤,直到达到 最小方差控制为止,即 y (k ) = w(k )
(5 )仿真例
y(k ) - 1.5y(k - 1) + 0.7y(k - 2) = u(k - 1) + 0.5u(k - 2) + e(k )
T ˆ g0 , g1 ,, g ng , f1 ,, f n f
若
A(z - 1 ) = 1 - 1.7 z - 1 + 0.7 z - 2
B (z - 1 ) = 1 + 0.5z - 1
C (z - 1 ) = 1 + 1.5 z - 1 + 0.9 z - 2
又设 t = 1, {w(t ) } 高斯白噪声序列N(0,1)。
求最小方差控制律 u * (t ) 和输出量的最小方差。
1 J E{x 2 ( k d )} E{ D ( z ) w(k d ) } 2 1 1 B( z ) E(z ) 1 E y ( k ) D ( z ) u ( k ) u ( k ) y ( k ) r 1 1 C( z ) C( z )
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
%极点配置直接自校正控制(最小相位确定性系统)
设被控对象为开环不稳定最小相位系统:
()2(1) 1.1(2)(3)0.5(4)y k y k y k u k u k --+-=-+-
期望传递函数分母多项式为:
112()1 1.32050.4966m A z z z ---=-+ 取遗忘因子=1,期望输出y r (k )为幅值为10的方波信号。
clear all;close all;
a=[1 -2 1.1];b=[1 0.5];d=3; %对象参数
Am=[1 -1.3 0.5]; %期望闭环特征多项式
na=length(a)-1;nb=length(b)-1;
nam=length(Am)-1;
nf=nb+d-1;ng=na-1;
%确定多项式A0
na0=2*na-nam-nb-1; %观测器最低阶次
A0=1;
for i=1:na0
A0=conv(A0,[1 0.3-i*0.1]); %生成观测器
end
AA=conv(A0,Am);naa=na0+nam;
nfg=max(naa,max(nf,ng)); %用于ufk, yuf更新
nr=na0; %R的阶次
L=400;
uk=zeros(d+nb,1);
ufk=zeros(d+nfg,1); %滤波输入的初值
yk=zeros(max(na,d),1);
yfk=zeros(d+nfg,1);
yrk=zeros(max(na,d),1);
yr=10*[ones(L/4,1);-ones(L/4,1);ones(L/4,1);-ones(L/4+d,1)] ;
%RELS初值设定
thetae_1=0.001*ones(nf+ng+2,1);
P=10^6*eye(nf+ng+2);
lambda=1; %遗忘因子
for k=1:L
time(k)=k;
y(k)=-a(2:na+1)*yk(1:na)+b*uk(d:d+nb);
ufk(d)=-AA(2:naa+1)*ufk(d+1:d+naa)+uk(d); %滤波输入输出
yfk(d)=-AA(2:naa+1)*yfk(d+1:d+naa)+yk(d);
%递推最小二乘法
phie=[ufk(d:d+nf);yfk(d:d+ng)];
K=P*phie/(lambda+phie'*P*phie);
thetae(:,k)=thetae_1+K*(y(k)-phie'*thetae_1);
P=(eye(nf+ng+2)-K*phie')*P/lambda;
%提取辨识参数
be0=thetae(1,k);
thetaeb(:,k)=thetae(:,k)/be0;
Fe=thetaeb(1:nf+1,k)';
Ge=thetaeb(nf+2:nf+ng+2,k)';
Bm1=sum(Am)/be0; %确定多项式Bm'
R=Bm1*A0;
u(k)=(-Fe(2:nf+1)*uk(1:nf)+R*[yr(k+d:-1:k+d-min(d,nr));yrk( 1:nr-d)]-Ge*[y(k);yk(1:ng)])/Fe(1);
%更新数据
thetae_1=thetae(:,k);
for i=d+nb:-1:2
uk(i)=uk(i-1);
end
uk(1)=u(k);
for i=max(d,na):-1:2 yk(i)=yk(i-1);
yrk(i)=yrk(i-1); end
yk(1)=y(k);
yrk(1)=yr(k);
for i=d+nfg:-1:d+1
ufk(i)=ufk(i-1); yfk(i)=yfk(i-1); end
end
figure(1);
subplot(2,1,1);
plot(time,yr(1:L),'r:',time,y);
xlabel('k');ylabel('y_r(k),y(k)');
legend('y_r(k)','y(k)');axis([0 L -20 20]);
subplot(2,1,2);
plot(time,u);
xlabel('k');ylabel('u(k)');axis([0 L -5 5]);
figure(2);
plot([1:L],thetaeb(2:nf+ng+2,:));
xlabel('k');ylabel('辨识参数f,g');
legend('f_1','f_2','f_3','g_0','g_1');axis([0 L -1 1.5]);
(注:素材和资料部分来自网络,供参考。
请预览后才下载,期待你的好评与关注!)。