机器人学齐次变换矩阵练习题
机器人技术 二、齐次坐标变换
第二章 机器人运动学
齐次变换矩阵
复合变换例题
假设(n,o,a)坐标系上的点P(7,3,2)也经历相同变换,但变换顺序按如下 进行,求出变换后该点相对于参考坐标系的坐标。 1、绕z轴旋转90度; 2、接着平移(4,-3,7); 3、接着再绕y轴旋转90度。
第二章 机器人运动学
齐次变换矩阵
相对动坐标系的变换
因此通过求逆阵就可以求得求矩阵逆例题变换矩阵的逆第二章机器人运动学在一个具有六自由度的机器人的第五个连杆上装有照相机照相机观察物体并测定它相对于照相机坐标系的位置然后根据以下数据来确定末端执行器要到达物体所必须完成的运动
第二讲
齐次坐标变换
主讲:吴海彬
福州大学机械工程及自动化学院
主要内容
引言 点的向量表示 单位向量 点和向量的齐次表示
a 1 o 1 n 1
a o 0
n a 0 n o 0
已知两个向量 a = ax i + ay j + az k b = bx i + by j + bz k 向量的点积是标量。用“ ·”来定义向量点积,即 a ·b = ax bx + ay by + az bz
向量的叉积是一个垂直于由叉积的两个向量构成的平面的向量。 用“×”表示叉积,即
相对运动坐标系的变换与相对固定参考坐标系不同,这时需 要右乘变换矩阵而不是左乘。
相对自身的运动即是相对动坐标。
相对动坐标是指动坐标系本身相对自身的运动,而不是动坐 标系中的点相对动坐标系的运动。 如果在一个变换过程中,既有相对固定坐标系的变换,也有 相对于动坐标系的变换,则应先写出第一个变换因子,在根据 变换的具体过程,依次左乘或右乘变换因子,最后乘以被变换 的对象(点或坐标)。
机器人运动学试题答案

78分1.空间中点的齐次坐标是采用个元素的列阵来描述的(6.0分)A.2B.3C.4D.5我的答案:C√答对2.采用齐次法描述空间中任意矢量的方向,其最后一个元素为(6.0分)A.0B.1C.2D.3我的答案:A√答对3.当机器人关节为移动关节,其关节变量为(6.0分)A.连杆长度B.连杆距离C.连杆转角D.连杆扭角我的答案:B√答对4.机器人运动学正问题是(6.0分)A.已知关节变量求取末端位姿B.已知末端位姿求取关节变量C.已知关节力求取末端位姿D.已知末端位姿求取关节力我的答案:A√答对5.当机器人关节为转动关节,其关节变量为(6.0分)A.连杆长度B.连杆距离C.连杆转角D.连杆扭角我的答案:D×答错1.机器人运动学逆问题可用以(8.0分))A.求取机器人末端位姿B.求取机器人关节变量C.求取机器人工作空间D.用以实现机器人控制我的答案:BD√答对2.齐次矩阵可用以描述(8.0分))A.一个坐标系相对于另一个坐标系的位姿B.刚体在空间中的位姿C.刚体的一系列运动D.关节与末端位姿的变换关系我的答案:ABD×答错3.机器人关节变量一般为(8.0分))A.连杆长度B.连杆距离C.连杆转角D.连杆扭角我的答案:BC√答对4.机器人连杆参数包括(8.0分))A.连杆长度B.连杆距离C.连杆转角D.连杆扭角我的答案:ABCD√答对5.机器人运动学正问题可用以(8.0分))A.求取机器人末端位姿B.求取机器人关节变量C.求取机器人工作空间D.用以实现机器人控制我的答案:AD×答错1.连杆坐标系是建立在连杆上,与连杆固定连接的坐标系(6.0分)我的答案:正确√答对2.机器人运动学用以建立末端位姿与关节变量之间的关系(6.0分)我的答案:正确√答对3.描述刚体位姿的齐次矩阵是一4*4的矩阵(6.0分)我的答案:正确√答对4.在齐次变换中,如果相对于固定坐标系运动,需右乘变换算子(6.0分)我的答案:错误√答对5.运动学正问题是已知机器人末端位姿求各关节运动变量(6.0分)我的答案:错误√答对。
机器人技术习题一
一、选择题(4选1,多于4个的为多选题;共20分,每小题2分)1.机器人的定义中,突出强调的是1).具有人的形象2).模仿人的功能3).像人一样思维4).感知能力很强2.一个刚体在空间运动具有几个自由度?1).3个2).4个3).5个4).6个3.运动逆问题是实现如下变换:1).从关节空间到操作空间的变换2).从操作空间到迪卡尔空间的变换3).从迪卡尔空间到关节空间的变换4).从操作空间到任务空间的变换4.对于有规律的轨迹,仅示教几个特征点,计算机就能利用________获得中间点的坐标。
1).优化算法2).平滑算法3).预测算法4).插补算法5.完整的传感器应包括下面哪三部分?1).敏感元件2).计算机芯片3).转换元件4).模数转换电路5).基本转换电路6).微波通信电路6.压电式传感器,即应用半导体压电效应可以测量1).电压2).亮度3).力和力矩4).距离7.用于检测物体接触面之间相对运动大小和方向的传感器是:1).接近觉传感器2).接触觉传感器3).滑动觉传感器4).压觉传感器8.机器视觉系统主要由三部分组成:1).图像的获取2).图像恢复3).图像增强4).图像的处理和分析5).输出或显示6).图形绘制9.示教—再现控制为一种在线编程方式,它的最大问题是:1).操作人员劳动强度大2).占用生产时间3).操作人员安全问题4).容易产生废品10.集控式足球机器人的智能主要表现在哪两个子系统?1).机器人小车子系统2).机器人通信子系统3).机器人视觉子系统4).机器人决策子系统5).机器人总控子系统二、判断题(回答Y/N;共30分,每题2分)1.工业机器人亦称之为操作机。
2.机器人的自由度数目就是机器人所具有独立坐标轴运动的数目.3.高维向量是由高维空间扩展而成的。
4.如果是相对于手坐标系H的运动,其相应的齐次变换矩阵左乘原齐次变换矩阵。
5.机构关节数的计算是将全部主动关节和被动关节数求和。
机器人运动学坐标变换

xi cos x j sin y j 0 z j yi sin x j cos y j 0 z j zi 0 x j 0 y j 1 z j
2017年2月19日星期日
工 业 机 器 人
第3章
3.2.1 直角坐标变换
工 业 机 器 人
第3章
3.1.1 机器人位姿的表示
姿态可h o p(x,y,z) h
o yh y
3.1 机器人的位姿描述
z
余弦值组成3×3的姿态
矩阵来描述。
cos(x , x h ) cos(x , yh ) cos(x , z h ) R cos(y , x h ) cos(y , yh ) cos(y , z h ) cos(z , x h ) cos(z , yh ) cos(z , z h )
2017年2月19日星期日
工 业 机 器 人
R
x , ij
第3章
3.2.1 直角坐标变换
2、旋转变换
②绕x轴旋转α角的 旋转变换矩阵为:
机器人运动学
zi
3.2 齐次变换及运算
zj
α
0 0 1 0 cos sin 0 sin cos
xj
yj oi oj
xi x j cos y j sin yi x j sin y j cos zi z j
xi
yi
xj
2017年2月19日星期日
工 业 机 器 人
第3章
3.2.1 直角坐标变换
2、旋转变换
机器人运动学
3.2 齐次变换及运算
① 绕z轴旋转θ角 若补齐所缺的有些项,再作适当变形,则有:
机器人的数学基础齐次变换矩阵及其运算0030

5
精选课件
v 例 动坐标系{A}相对于固定坐标系的X0、Y0、Z0轴作 v (-1,2,2)平移后到{A’};动坐标系{A}相对于自身坐标系(即动系)
的X、Y、Z轴分别作(-1,2,2)平移后到{A’’}。已知A,写出坐标系 {A’}、 {A’’}
6
精选课件
v2.旋转的齐次变换
精选课件
19
精选课件
下面我们写出变换矩阵的一般表达形式
nx ox ax px ny oy ay py T = nz oz az pz 0001
式中 n, o, a 是旋转变换列向量,p 是平移向量,其逆是
T-1 =
nx ny nz - p.n ox oy oz - p.o ax ay az - p.a 000 1
13
精选课件
14
精选课件
齐次变换矩阵 的数学意义: (1)同一点在不同坐标系{B}和{A}中的变换; (2)描述坐标系{B}相对于坐标系{A}的位置和方位; (3)点的运动算换矩阵相乘
对于给定的坐标系{A}、{B}、{C},已知{B}相对{ A}的描述为 ,{C}相对{B}的描述为 ,则
加以说明,并绘图。
35
精选课件
17
精选课件
5.变换矩阵求逆
如果知道坐标系{B}相对于{A}的描述。希望得到{A}相对 于{B}的描述,这是个齐次变换求逆问题。 求逆问题可以描述为:已知 ,求解 。
•对4*4矩阵直接求逆; •利用齐次变换矩阵的特点,简化矩阵求逆运算。
利用旋转矩阵正交性 利用复合变换公式(2.13) ,求出
18
在{B}中描述。
则是封闭环。如图所示,工具坐标系{T}相对于基座坐标系 的描{B述} 可用两种变换矩阵的乘积来表示:
第2章 机器人运动学—数学基础[可打印版,含习题]
![第2章 机器人运动学—数学基础[可打印版,含习题]](https://img.taocdn.com/s3/m/c5aed3c4a1c7aa00b52acbd8.png)
式(2-20)和式(2-21)无论在形式上,还是在结果上都是 一致的。因此我们有如下的结论:
动坐标系在固定坐标系中的齐次变换有2种情况:
定义1:如果所有的变换都是相对于固定坐标系中各坐标轴旋 转或平移,则依次左乘,称为绝对变换。
H
=
Trans
(a
b
c)
=
⎢⎢0 ⎢0
1 0
0 1
b⎥⎥ c⎥
⎢⎣0 0 0 1⎥⎦
w′
o′ v′
u′
b
a
注意:平移矩阵间可以交换,
x
平移和旋转矩阵间不可以交换
z c
oy
2.2.4 相对变换
举例说明:
例1:动坐标系∑0′起始位置与固定参考坐标系∑0重合,动坐标系 ∑0′做如下运动:①R(Z,90º) ②R(y,90º) ③Trans(4,-3, 7) ,求合成矩阵
反过来: Puvw = R −1 Pxyz
R−1 = R* det R
R∗为R的伴随矩阵,det R为R的行列式,由于R是正交矩阵,
因此R −1 = R T
2.2.2 旋转齐次变换
用齐次坐标变换来表示式(2-7)
⎡Px ⎤ ⎡
0⎤⎡Pu ⎤
⎢⎢Py
⎥ ⎥
=
⎢ ⎢
R
0⎥⎥⎢⎢
Pv
⎥ ⎥
⎢ ⎢ ⎣
Pz 1
• 机器人可以用一个开环关节链来建模
• 由数个驱动器驱动的转动或移动关节串联而成
• 一端固定在基座上,另一端是自由的,安装工具,用以 操纵物体
• 人们感兴趣的是操作机末端执行
n
器相对于固定参考坐标数的空间 几何描述,也就是机器人的运动 学问题
• 机器人的运动学即是研究机器人
(答案)机器人第三章作业题

第三章作业题1.试判断下列矩阵是否是正交矩阵?1) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-100001010 2) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-010100001 3) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡110001100 解:将矩阵乘其转置矩阵,乘积为单位矩阵,故为正交矩阵;如果不是单位阵,则不是正交矩阵。
计算结果:1)、2)、为正交矩阵,3)不是。
2.齐次矩阵表示为⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--100?201?100?010?,利用齐次矩阵的性质求出矩阵中“?”符号的元素。
3. 已知R 为旋转矩阵,b 为平移向量,试写出相应的齐次矩阵。
⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=010100001R ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=523b解:齐次矩阵为4.当动坐标先绕基坐标Z 轴转动90度,再绕基坐标X 轴转动-90度,再在基坐标上移动(3,7,9)。
试用齐次坐标法描述当前动坐标的位姿。
解:由于 ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=1000010000010010)90,( z Rot ,⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=-10000100100001)90,( x Rot ,⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=1000910070103001)973(Trans ,则表示动坐标位姿的齐次矩阵 )90,()90,()973(︒*︒-*=z Rot x Rot Trans A ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-*⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-*⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=1000900171003010100001000001001010009010710030011000010000010010*100000100100000110009100701030015.手坐标上的向量a=[0 2 0]T ,先沿基坐标Y B 轴移动10为b ,再分别绕基坐标X B 轴和手坐标X H 轴转-90︒分别为c 和d ,试通过齐次变换矩阵,计算该向量变换后的基座标值。
工业机器人技术课后作业

成绩:《工业机器人》大作业学期:2014~2015学年第一学期指导教师:李敏姓名:学号:年级、专业:2011级机制班西南交通大学峨眉校区机械工程系2.6 已知齐次变换矩阵H=0100001010000001⎡⎤⎢⎥-⎢⎥⎢⎥-⎢⎥⎣⎦要求ot(,)R θƒ=H 。
确定ƒ和θ的值解:0100001010000001H ⎡⎤⎢⎥-⎢⎥=⎢⎥-⎢⎥⎣⎦,∴由式(2.46)得001x y z n n n =⎧⎪=⎨⎪=-⎩;100x y z o o o =⎧⎪=⎨⎪=⎩;010x y z a a a =⎧⎪=-⎨⎪=⎩; 由式(2.48)得:111cos (1)(0001)222x y z n o a θ=++-=++-=- 又:把旋转规定为绕矢量ƒ的正向旋转,使得0≤θ≤180 ,故120θ= 。
由式(2.52)得:2sin 3z y x o a θ-ƒ===2sin x z y a n θ-ƒ===;2sin 3y x z n o θ-ƒ===-综上,=⎡⎤⎢⎥⎢⎥⎢⎥ƒ⎢⎥⎢⎢⎢⎢⎥⎣⎦,120θ=。
2.10 {A}和{B}两坐标系仅仅方向不同。
坐标系{B}是这样得到的:首先与坐标系{A}重合,然后绕单位矢量ƒ旋转θ弧度,即()AA B B R R θ=ƒ,求证A B R e θƒ= ,式中 000z y zx y x⎡⎤-ƒƒ⎢⎥ƒ=ƒ-ƒ⎢⎥⎢⎥-ƒƒ⎣⎦ 证明:cos sin f e f θθθ=+ 且000zy zx y xf f f f f f f ⎡⎤-⎢⎥=-⎢⎥⎢⎥-⎣⎦0sin sin cos sin 0sin sin sin 0z y f z x y x f f e f f f f θθθθθθθθ⎡⎤-⎢⎥∴=+-⎢⎥⎢⎥-⎣⎦···········(a )根据式(2.45)和式(2.47),令=ot()R R θƒ, 即0000000101xx x x x y x z z x y y y y x yz y y z y x z z z x z y y z x z z n o a f f vers c f f vers f s f f vers f s n o a f f vers f s f f vers c f f vers f s n o a f f vers f s f f vers f s f f vers c θθθθθθθθθθθθθθθθθθ+-+⎡⎤⎡⎤⎢⎥⎢⎥++-⎢⎥⎢⎥=⎢⎥⎢⎥-++⎢⎥⎢⎥⎣⎦⎣⎦··(b ) 由已知:()A A B B R R θ=ƒ,,将此式作式(b )变换,可得=0x y f f vers θ,即cos =0θ1-,则=90θ 。
机器人参考答案1
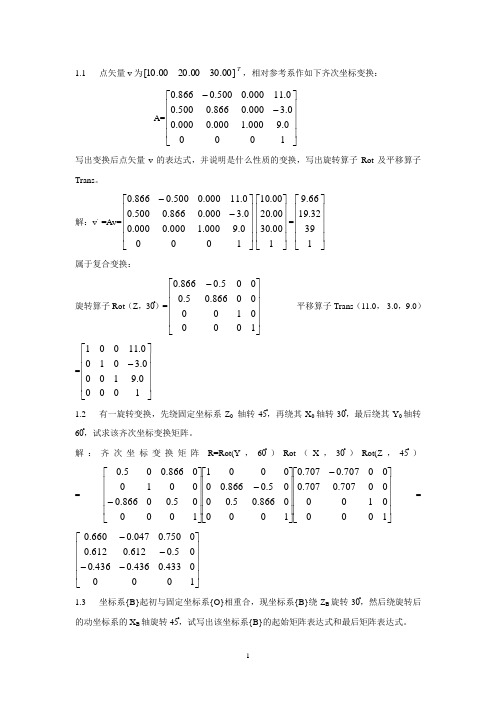
1.1 点矢量v 为]00.3000.2000.10[T ,相对参考系作如下齐次坐标变换:A=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--10000.9000.1000.0000.00.3000.0866.0500.00.11000.0500.0866.0 写出变换后点矢量v 的表达式,并说明是什么性质的变换,写出旋转算子Rot 及平移算子Trans 。
解:v ,=Av=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--10000.9000.1000.0000.00.3000.0866.0500.00.11000.0500.0866.0⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡100.3000.2000.10=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡13932.1966.9 属于复合变换:旋转算子Rot (Z ,30̊)=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-1000010000866.05.0005.0866.0 平移算子Trans (11.0,-3.0,9.0)=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-10000.91000.30100.110011.2 有一旋转变换,先绕固定坐标系Z 0 轴转45̊,再绕其X 0轴转30̊,最后绕其Y 0轴转60̊,试求该齐次坐标变换矩阵。
解:齐次坐标变换矩阵R=Rot(Y ,60̊)Rot (X ,30̊)Rot(Z ,45̊)=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-1000010000707.0707.000707.0707.010000866.05.0005.0866.000001100005.00866.000100866.005.0=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----10000433.0436.0436.005.0612.0612.00750.0047.0660.0 1.3 坐标系{B}起初与固定坐标系{O}相重合,现坐标系{B}绕Z B 旋转30̊,然后绕旋转后的动坐标系的X B 轴旋转45̊,试写出该坐标系{B}的起始矩阵表达式和最后矩阵表达式。
机器人期末测试含部分答案

工业机器人期末测试一、 机器人运动学1. 关节型机器人结构如图所示。
已知关节变量值12345690,0,90,90θθθθθθ====== ,22431.8,149.09,a mm d mm ==46433.07,56.25d mm d mm ==。
求各关节运动变换的齐次变换矩阵i T 。
解(1)D-H 坐标系的建立按D-H 方法建立各连杆坐标系,如图所示。
忽略机器人高度的影响,将 {0o} 系设在关节1的轴线上,{0o}与{01}重合,o0x0代表机器人的横方向,初始位置与肩关节轴线相同,o0y0 代表机器人手臂的正前方,o0z0 代表机器人身高方向。
o1x1 轴在水平面内,o2x2 轴沿大臂轴线方向,o3x3轴与小臂轴线垂直,o4x4∥o5x5∥o6x6。
坐标原点o2、o3与o4、o5重合。
o6x6y6z6为终端坐标系,该坐标系考虑了工具长度d6。
(2)确定各连杆的D-H参数(3)求两杆之间的位姿矩阵Ti11010 1010 0-100 0001 c ss cT-⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦2222220222020010001c s a cs c a sTd-⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦33030 3030 0100 0001 c ss cT⎡⎤⎢⎥-⎢⎥=⎢⎥⎢⎥⎣⎦44404040400-100001c ss cTd-⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦55050505000100001c ss cT⎡⎤⎢⎥-⎢⎥=⎢⎥⎢⎥⎣⎦66660066000010001c ss cTd-⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦2.如图二自由度平面机械手,已知手部中心坐标值为(),x y。
求11该机械手运动方程的逆解θ及1d。
1二、机器人动力学1.如图二自由度平面机械手,已知杆长120.5l l m==,相关参数如下表所示。
求表中两种情况下的关节瞬时速度1θ∙和2θ∙。
2. 已知二自由度平面机械手的雅可比矩阵为112222112222sin sin sin cos cos cos l l l J l l l θθθθθθ---⎡⎤=⎢⎥+⎣⎦。
工业机器人大作业

一、简答题
1.什么是机器人的内部传感器和外部传感器?举例说明之。
2. 按机器人的开发内容与应用进行分类,机器人应分为那几类?分别举例说明之。
3.齐次向量是怎样定义的?试举例说明之。
二、计算题
1.一个两关节机器人,关节1、2的齐次变换矩阵分别为A1和A2,试求该机器人的坐标变换矩阵。
2.已知R 为旋转矩阵,b 为平移向量,试写出相应的齐次矩阵。
三. 设计题:
1、MSO —CP -020型垂直六关节机器人的坐标结构简图如图1所示,其各连杆的D -H 参数和关节变量列于表1,(1)写出连杆D-H 参数及关节变量;(2)求出各连杆坐标系间变换矩阵A i ;(3)并写出机器人运动学方程。
111
11c 0s 0s 0c 001000
00
1θθθθ-⎡⎤⎢⎥⎢⎥=⎢⎥-⎢⎥⎣⎦A 2
2
222
2c 0s 0s 0c 00100
00
1d θθθθ⎡⎤
⎢⎥-⎢⎥=⎢⎥⎢⎥⎣⎦
A ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=010100001R ⎥⎥
⎥⎦⎤
⎢⎢⎢⎣⎡--=523b
图1:垂直六关节机器人的坐标结构简图表1:连杆D-H参数及关节变量。
举例说明运用齐次变换矩阵求解机器人正运动学的方法

举例说明运用齐次变换矩阵求解机器人正运动学的方法齐次变换矩阵用于描述刚体在空间中的位姿(位置和方向)。
在机器人正运动学问题中,运用齐次变换矩阵可以求解机器人末端执行器的位姿。
我们以一个简单的2R(两个旋转关节)机械臂为例进行说明。
假设2R机械臂有两个关节q1和q2,臂长分别为L1和L2。
我们的目标是求解两个关节角度q1和q2下,末端执行器的位置坐标(x, y)和方向theta。
首先,我们需确定两个坐标系。
通常将基坐标系(frame0)放在第一个关节处,frame1放在第二个关节处,frame2放在末端执行器处。
然后,我们需要分别计算从frame0到frame1的齐次变换矩阵T01和从frame1到frame2的齐次变换矩阵T12。
T01表示frame1相对于frame0的位姿,其旋转角度为q1,平移距离为L1。
矩阵形式如下:```T01 = | cos(q1) -sin(q1) 0 L1*cos(q1) || sin(q1) cos(q1) 0 L1*sin(q1) || 0 0 1 0 || 0 0 0 1 |```同理,T12表示frame2相对于frame1的位姿,其旋转角度为q2,平移距离为L2。
矩阵形式如下:```T12 = | cos(q2) -sin(q2) 0 L2*cos(q2) || sin(q2) cos(q2) 0 L2*sin(q2) || 0 0 1 0 || 0 0 0 1 |```接下来,我们需要计算从frame0到frame2的齐次变换矩阵T02。
通过矩阵乘法,我们可以得到:```T02 = T01 * T12```最后,我们从T02矩阵中提取机器人末端执行器的位置和方向。
位置坐标(x, y)就是T02矩阵中的平移部分,即:```x = T02[0][3]y = T02[1][3]```方向theta可以通过以下公式计算:```theta = atan2(T02[1][0], T02[0][0])```所以,通过齐次变换矩阵,我们可以求解出机器人末端执行器的位置和方向,从而解决2R机械臂的正运动学问题。
机器人学之齐次变换共65页文档

4
南京航空航天大学
机电学院机械电子工程系
5
南京航空航天大学
机电学院机械电子工程系
6
南京航空航天大学
1.3 机器人的组成和构型
2、圆柱坐标型 (R2P) 结构简单紧凑,运动直观,其运动耦合性较弱,控制也较 简单,运动灵活性稍好。但自身占据空间也较大,但转动 惯量较大,定位精度相对较低。
圆柱坐标型机器人模型 机电学院机械电子工程系
Verstran 机器人
2021/7/21
Verstran 机器人
7
南京航空航天大学
1.3 机器人的组成和构型
3、极坐标型(也称球面坐标型)(2RP) 有较大的作业空间,结构紧凑较复杂,定位精度较低。
极坐标型机器人模型
Unimate 机器人
机电学院机械电子工程系
2021/7/21
8
南京航空航天大学
1.3 机器人的组成和构型
六足漫游机器人
六轮漫游机器人
仿鱼机器人 机电学院机械电子工程系
2021/7/21
仿鸟机器人
12
南京航空航天大学
1.4 机器人的规格指标
▪ 自由度数 衡量机器人适应性和灵活性的重要指标,一般 等于机器人的关节数。机器人所需要的自由度数决定与其 作业任务。
▪ 负荷能力 机器人在满足其它性能要求的前提下,能够承 载的负荷重量。
机电学院机械电子工程系
2021/7/21
17
南京航空航天大学
运动学研究
引言
运动学正问题
运动学逆问题
➢ 丹纳维特(Denavit)和哈顿贝 格(Hartenberg) 于1955年提 出了一种矩阵代数方法解决机 器人的运动学问题 — D-H方法
工业机器人 齐次变换 常考例题与答案

3-1.点矢量v 为]00.3000.2000.10[T,相对参考系作如下齐次坐标变换:A=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--10000.9000.1000.0000.00.3000.0866.0500.00.11000.0500.0866.0 写出变换后点矢量v 的表达式,并说明是什么性质的变换,写出其经平移坐标变换和旋转变换后的其次坐标变换矩阵(即写出旋转算子Rot 及平移算子Trans )。
解:v ,=Av=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--10000.9000.1000.0000.00.3000.0866.0500.00.11000.0500.0866.0⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡100.3000.2000.10=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡13932.1966.9 属于复合变换:旋转算子Rot (Z , )=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-1000010000866.05.0005.0866.0 平移算子Trans (11.0,-3.0,9.0)=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-10000.91000.30100.110013-2 . 有一旋转变换,先绕固定坐标系Z 0 轴转 ,再绕其X 0轴转 ,最后绕其Y 0轴转 ,试求该齐次坐标变换矩阵。
解:齐次坐标变换矩阵R=Rot(Y , )Rot (X , )Rot(Z , ) =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-100010000707.0707.000707.0707.010000866.05.0005.0866.000001100005.00866.000100866.005.0=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----10000433.0436.0436.005.0612.0612.00750.0047.0660.0 3-3. 坐标系{B}起初与固定坐标系{O}相重合,现坐标系{B}绕Z B 旋转 ,然后绕旋转后的动坐标系的X B 轴旋转 ,试写出该坐标系{B}的起始矩阵表达式和最后矩阵表达式。
工业机器人习题

一、解:⒈坐标系{j}与{i}沿矢量 平移的齐次 变换矩阵:⒉坐标系{j}与{i}绕x 轴旋转 的齐次变换矩阵:⒊坐标系{j}与{i}绕z 轴旋转 的齐次变换矩阵:⒋坐标系{j}与{i}先沿矢量 平移,再绕x 轴旋转 的齐次变换矩阵:二、已知坐标系{j}是由坐标系经过以下变换得到的:{i}坐标系先绕z 轴旋转 ,然后绕x 轴旋转 ,最后沿坐标系的y 轴平移2个单位。
要求: 1、确定坐标系{i}到坐标系{j}的齐次变换矩阵;2、若已知P 点在坐标系{i}中的位置矢量为 ,则在坐标系{j}中P 点的位置矢量的 各坐标分量分别为多少?解:1、确定坐标系{i}到坐标系{j}的齐次变换矩阵:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=1000610018010120011M ⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=100002123002321000011000060cos 60sin 0060sin 60cos 000013M k j i p i 61812-+=60⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡-=10000100002321002123100001000030cos 30sin 0030sin 30cos 3 M ⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡--=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=1000122321082123060011000030cos 30sin 0030sin 30cos 00001100012000800060014M 30k j i p i 1286+-= 30T i p )1,10,3(=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡-=100001002010000110000010010000011000090cos 90sin 0090sin 90cos 000011000010000010010100001000090cos 90sin 0090sin 90cos 321M M M1、确定坐标系{i}到坐标系{j}的齐次变换矩阵:2、两坐标系关系为:三、已知三自由度机器人如图所示。
机器人习题课

1.10(改变第1.9题的变换次序)
初始状态下运动坐标系(X′,Y′,Z′)与固 定参考坐标系(X,Y,Z)一致,求固连 在该运动坐标系上的点P(2,7,5)依 次经过下列变换后相对于固定参考坐标 系的坐标。 (1)绕Y轴旋转90°; (2)再平移[3,6,-5] ; (3)再绕X轴旋转90°。
1.11(改变1.9坐标系)
1.2
有一旋转变换,先绕固定坐标系Z0轴转 45°,再绕其X0轴转30°,最后绕其Y0轴 转60°,试求该齐次坐标变换矩阵。
1.3
坐标系{B}起初与固定坐标系{O}相重合,
现坐标系{B}绕ZB旋转30°,然后绕旋转
后的动坐标系的XB轴旋转45°,试写出
该坐标系{B}的起始矩阵表达式和最后矩 阵表达式。
1.7
Байду номын сангаас
图(a)所示的两个楔形物体,试用两个变 换序列分别表示两个楔形物体的变换过 程,使最后的状态如图(b)所示。
1.8
旋转坐标系中点P的坐标为(3,4,5), 将此坐标系绕参考坐标系的y轴旋转90°, 求旋转后P点相对于参考坐标系的坐标, 并作图检验计算结果。
1.9
初始状态下运动坐标系(X′,Y′,Z′)与固 定参考坐标系(X,Y,Z)一致,求固连 在该运动坐标系上的点P(2,7,5)依 次经过下列变换后相对于固定参考坐标 系的坐标。 (1)绕Y轴旋转90 °; (2)再绕X轴旋转90 °; (3)再平移[3,6,-5]。
1.5
写出齐次变换矩阵ABT ,它表示坐标系{B} 连续相对固定坐标系{A}作以下变换:
(1) 绕ZA轴旋转90°。 (2) 绕XA轴转–90°。 (3) 移动[3,7,9]T。
工业机器人学第三章习题

A3-1.写出齐次变换矩阵 T,它表示相对固定坐标系{A}作以下变换。
B1) 绕Z 퐴轴旋转 90°; 2) 再绕X 퐴轴转-90°;푇3) 最后做移动【3 7 9 】;A3-2.写出齐次变换矩阵 T,它表示相对坐标系{B}做以下变换。
B 푇1) 移动【3 7 9 】;2) 绕X 퐵轴旋转-90°; 3) 绕Z 퐵轴转 90°。
3-3.求下面齐次变换的逆变换푇−1 0 1 0 −10 0 −1 2 −1 0 0 0 T = []13-4.已知 0.25 0.43 0.86 5.0A B T 0.87 −0.50 0 −4.0= [ ] 0.43 0.75 −0.50 3.0 0 0 0 1A求 T的第(2,4)元素.B3-5 已知矩阵? 0 −1 0 ? 0 0 1 ? −10 2 ?1] [代表齐次坐标变换,求其中的未知元素值(第一列元素)。
푈3-6 设工件相对于参考系{U}的描述为T,机器人基座相对于参考系푃푈的描述为T,已知B010−1100100−12−1000푈=[푇푃0105푈]푃=[]퐵001900010001要求机器人手爪坐标系{H}与工件坐标系{P}重合,试求变换퐻퐵푇3-7. 已知坐标变换矩阵푈퐴푇,퐵퐴푇,푈퐶푇.0.866−0.50001110000.5000.8660−100.866−0.50010푈=[]퐵퐴푇=[푇] 퐴001800.5000.866−200001000 10.866−0.5000−30.4330.750−0.5−3퐶=[푇]푈0.2500.4330.86630001画出空间尺寸链图,并求퐵퐶푇.3-8.如图3-17 所示的多面体顶点坐标系,试求4x4 的齐次变换矩阵푖−1푖푇和0푖푇(i=1,2,3,4,5).3-9. 如图3-18 所示的多面体各顶点坐标系,试求4x4 的齐次变换矩阵푖−1푖푇和0푖푇(i=1,2,3,4).3-10. 如图3-19 所正方体的顶点和中心坐标系,试求4x4 的齐次变换矩阵푖−1푖푇和0푖푇(i=1,2,3)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
答案:对
难易程度:
答案解析:
题型:判断题
5、已知 ,求 。
A.[0 0 -1 2
0 1 0 -2
1 0 0 -4
0 0 0 1]
B.[0 0 -1 2
0 1 0 2
1 0 0 -4
0 0 0 1]
C. [0 0 -1 2
1、等式 是正确的。
答案:对
难易程度:
答案解析:
题型:判断题
2、RPY角是用三个角度表示物体的姿态,这三个角度是绕固定轴x-y-z旋转的角度。
答案:对
难易程度:
答案解析:
题型:判断题
3、z-y-x欧拉角是用三个角度表示物体的姿态,这三个角度是绕运动轴z-y-x旋转的角度
答:对
难易程度:
答案解析:
题型:判断题
0 1 0 -2
1 0 0 4
0 0 0 1]
D.[1 0 -1 2
0 1 0 -2
0 0 0 -4
0 0 0 1]
答案:A
难易程度:
答案解析:
题型:单选题